Способ управления искусственным ортезным или протезным коленным суставом - RU2661000C2
Код документа: RU2661000C2
Чертежи


Описание
Изобретение относится к способу управления искусственным ортезным или протезным коленным суставом, на котором расположен компонент голени и который снабжен оказывающим сопротивление устройством, в котором сопротивление сгибанию изменяется в зависимости от данных датчика, определяемых во время использования ортезного или протезного коленного сустава по меньшей мере одним датчиком.
Протезные или ортезные коленные суставы заменяют или поддерживают функцию естественного коленного сустава. Для достижения максимально оптимальной функциональности искусственного коленного сустава на рынке имеется большое число конструкций, которые влияют на поведение коленных суставов на фазе стояния и фазе маха. Известны мехатронные коленные суставы, у которых с помощью нескольких различных датчиков регистрируются ситуации движения, и на основе данных датчиков происходит управление оказывающим сопротивление устройством, с помощью которого варьируется сопротивление сгибанию или сопротивление разгибанию. Основная проблема заключается в том, что большое многообразие возможных ситуаций движения с трудом подпадает под простые правила. Поэтому для управления исполнительными элементами и тормозами используются так называемые механизмы состояния, которые являются высококомплексными и отображают много различных активностей. Недостатками являются длительная продолжительность разработок и использование дорогих деталей.
ЕР 1237513 В1 касается заменяющего существование или функцию конечности поддерживающего устройства по меньшей мере из двух соединенных между собой искусственным суставом частей и контрольного устройства. Поддерживающее устройство включает в себя датчик, который определяет угол наклона по отношению к линии силы тяжести соединенной с суставом части и связан с контрольным устройством. Контрольное устройство расположено так, что оно влияет на сустав на основе переданных датчиком данных угла наклона. В одном варианте датчик угла наклона расположен в виде протеза коленного сустава на колене трубы, а для дополнения ситуации данных на голени может быть расположен второй датчик.
DE 102008027639 А1 относится к ортезному суставу для поддержания анатомического коленного сустава, содержащему верхнюю часть сустава и нижнюю часть сустава, шарнирно соединенные между собой. Предусмотрены блокировочный элемент для автоматических разблокирования и блокирования ортезного сустава в любом положении, исполнительный элемент для блокировочного элемента и сенсорное средство для регистрации релевантной информации для разблокирования и блокирования. Также имеются блок обработки зарегистрированной информации и для передачи этой информации на блок управления и/или регулирования исполнительного элемента. Сенсорное средство содержит по меньшей мере два датчика из группы датчиков наклона, датчиков угла поворота, датчиков ускорения или гироскопов для регистрации информации, которые описывают состояние движения и/или покоя человека. Могут быть выбраны два датчика одного типа или по одному датчику разных типов. Все датчики расположены ниже анатомического сустава, в частности коленного сустава.
Задачей изобретения является создание способа управления искусственным ортезным или протезным коленным суставом, с помощью которого можно было бы с небольшими затратами на управление достичь надежного характера ходьбы.
Согласно изобретению эта задача решается посредством способа с признаками главного пункта формулы. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы, в описании и на чертежах.
В способе управления искусственным ортезным или протезным коленным суставом, на котором расположен компонент голени и которому придано оказывающее сопротивление устройство, в котором сопротивление сгибанию изменяется в зависимости от данных датчика, определяемых во время использования ортезного или протезного коленного сустава по меньшей мере одним датчиком, предусмотрено, что определяется линейное ускорение компонента голени и при не превышении предельного значения линейного ускорения компонента голени изменяется, в частности уменьшается, сопротивление сгибанию. Предложенным способом можно реализовать управление коленным суставом, под которым подразумеваются как ортезные коленные суставы, так и протезные коленные суставы, исключительно с помощью простых датчиков без необходимости осуществления сложных и подверженных помехам измерений усилий. В частности, это делает излишним приложения DMS.
В одном варианте предусмотрено, что разогнутое шаговое положение протеза или ортеза определяется с помощью протезного или ортезного коленного сустава и при наличии разогнутого шагового положения сопротивление сгибанию изменяется. Разогнутое шаговое положение имеет место тогда, когда угол колена составляет 0° или коленный сустав слегка согнут, т.е. имеет угол сгиба в пределах диапазона ±5°. При наличии разогнутого шагового положения можно исходить из того, что пользователь коленного сустава находится на терминальной фазе стояния, в результате чего может произойти уменьшение сопротивления.
Для обнаружения терминальной фазы стояния можно определить к тому же абсолютный угол компонента голени и при превышении заданного предельного значения абсолютного угла компонента голени уменьшить сопротивление сгибанию. Посредством угла наклона компонента голени к вертикали можно сделать информативные выводы о соответствующей фазе в пределах одного шага, так что абсолютный угол является хорошим индикатором изменения, в частности уменьшения, сопротивления сгибанию.
Абсолютный угол компонента голени можно определить по абсолютному углу компонента бедра и известному, например измеренному, углу колена или измерить непосредственно с помощью датчика инерциального угла, который закреплен на компоненте голени.
Далее может быть предусмотрено, что можно к тому же с помощью датчика угла колена определить угол колена и при не превышении предельного значения угла колена уменьшить сопротивление сгибанию, поскольку угол колена позволяет сделать вывод о разогнутом состоянии ноги или протеза и тем самым о соответствующей фазе в пределах одного шагового цикла. Угол колена можно определить также по инерциальным углам бедра и голени.
При наличии нескольких параметров, таких как превышение предельного значения абсолютного угла компонента голени, непревышение предельного значения угла колена и непревышение предельного значения ускорения компонента голени, можно с высокой вероятностью исходить из того, что сопротивление сгибанию должно быть изменено, в частности уменьшено, чтобы достичь надежного управления коленным суставом исключительно простыми датчиками.
В преобладающем числе протезных и ортезных систем с микропроцессорным управлением для управления используется измерение усилий и моментов посредством тензометрических полосок, причем решающим аспектом надежности коленного сустава считается переключение с высокого сопротивления сгибанию на фазе стояния на низкое сопротивление сгибанию на фазе маха и наоборот. Переключение называется также актированием фазы маха. Помимо расчета сгибающих моментов на высоте лодыжки или момента колена для активирования фазы маха приходится превышать пороговые значения рассчитанных по тензометрическим полоскам значений. Кроме того, активирование фазы маха происходит, лишь начиная с определенного наклона вперед, так что ходьба мелкими шагами затруднена.
В предложенном способе предусмотрено, что для управления коленным суставом используются исключительно датчики угла колена и инерциальные датчики, по данным которых можно рассчитать необходимые величины или вспомогательные величины. С помощью инерциального датчика определяется абсолютный угол компонента голени, т.е. наклон продольной протяженности компонента голени к вертикали. Абсолютный угол должен превышать минимальную величину, чтобы обнаружить наклон вперед компонента голени, т.е. наклон в направлении ходьбы вперед. Лишь начиная с определенного угла в направлении ходьбы вперед, можно исходить из того, что в направлении вперед должен быть сделан шаг. С помощью датчика угла колена определяется угол колена. Непревышение предельного значения угла колена является признаком того, что пользователь находится на терминальной фазе стояния, а это указывает на активирование фазы маха и тем самым уменьшение сопротивления сгибанию. Дополнительно определяется ускорение компонента голени. При непревышении предельного значения ускорения можно исходить из того, что стопный компонент, например стопная пластина или протезная стопа, еще находится на основании, а это гарантирует, что пациент находится на терминальной фазе стояния шага и тем самым может произойти уменьшение сопротивления сгибанию.
В одном варианте предусмотрено, что определяется угловая скорость колена и только при превышении угловой скорости колена сопротивление сгибанию уменьшается. Минимальная угловая скорость колена должна иметь место, поскольку в противном случае может иметь место ситуация стояния, в которой уменьшение сопротивления сгибанию может быть нежелательным. Небольшая или относительно небольшая угловая скорость колена дополнительно гарантирует, что пациент будет находиться на терминальной фазе стояния при движении вперед.
Угловую скорость компонента голени можно рассчитать или определить посредством датчика, например, по данным гироскопа. Рассчитанное или определенное значение угловой скорости сравнивается с предельным значением, и сопротивление сгибанию уменьшается только тогда, когда угловая скорость ниже предельного значения.
Линейное ускорение компонента голени определяется или измеряется предпочтительно на уровне ступни и берется в основу управления, а ускорение на уровне ступни возникает из линейных ускорений в положении датчика ускорений, например под осью коленного сустава, из углового ускорения компонента голени в качестве производной первого порядка сигнала гироскопа и из радиуса-вектора от положения датчика ускорений к опорному положению на стопе, например на плюсне. За счет линейных ускорений на уровне ступни делаются выводы о кинематическом условии контакта между стопой или стопной частью и основанием или о динамике движения, и можно определить, на какой фазе шага находится пациент. Если линейное ускорение отсутствует или присутствует лишь очень малое линейное ускорение, то стопа, под которой понимается также протезная стопа или стопная часть ортеза, находится еще на фазе стояния, больше не происходит никакого вертикального ускорения, и фаза постановки стопы окончена, так что за счет линейных ускорений можно сделать выводы об ориентации и позиционировании ноги. По ускорениям можно также определить соответствующие скорости, которые можно также соответствующим образом привлечь для управления.
В одном варианте предусмотрено, что уменьшение сопротивления сгибанию происходит при гиперэкстензии компонента голени, т.е. гиперэкстензия является частью параметров, которые лежат в основе управления для изменения сопротивления сгибанию. Угол колена 0° предполагается тогда, когда компонент голени без усилия прилегает к упору разгибания. Возрастание угла колена предполагается тогда, когда сгибание коленного сустава происходит против направления ходьбы. Если происходит чрезмерное разгибание коленного сустава, то угол колена продолжает уменьшаться, поскольку он считается отрицательным углом колена. Если коленный сустав испытывает экстензионный момент вокруг оси колена за счет действующих на сустав усилий, например за счет реакции опоры, усилий культи или моментов бедра, может возникнуть гиперэкстензия, при обнаружении которой можно сделать вывод о том, что пациент находится на терминальной фазе стояния и поэтому должно произойти активирование фазы маха.
Коленный сустав может иметь упругий упор разгибания, например, чтобы предотвратить поворот жестко в упор компонента голени при экстензионном движении. Упругий упор разгибания может состоять из эластомерных тел, пружинящих элементов и т.п. За счет упругого упора разгибания при приложении экстензионного момента вокруг оси колена возможно избыточное разгибание в небольшом угловом диапазоне, а при отсутствии экстензионного момента компонент голени за счет упругого упора разгибания приводится в разогнутое или почти разогнутое положение, в котором угол колена составляет 0°. После снятия нагрузки сустав возвращается в разогнутое или почти разогнутое положение. Зная характеристику пружины упора разгибания и отрицательный угол колена, можно рассчитать момент колена, действующий вокруг оси колена в направлении экстензии, и при наличии момента колена в направлении экстензии, т.е. при сжатии упругого упора разгибания уменьшить сопротивление сгибанию. При этом момент колена рассчитывается на основе угла колена и знания характеристики пружины, а динамометрические датчики или датчики момента не нужны. Наличие момента колена в направлении экстензии является дополнительным фактором оценки того, на какой фазе шага находится пациент и следует ли непосредственно фаза маха и необходимо ли в соответствии с этим уменьшить сопротивление сгибанию.
Направление вращения компонента голени можно рассчитать или определить посредством датчика, например гироскопа. Сопротивление сгибанию уменьшается только тогда, когда имеет место вращение компонента голени вперед, чтобы при ходьбе назад исключить нежелательное уменьшение сопротивления сгибанию.
Посредством датчика ускорения можно определить данные ускорения компонента голени, чтобы вывести или определить необходимые параметры.
После уменьшения сопротивления сгибанию оно может быть снова повышено, в частности, до уровня фазы стояния или до такого высокого уровня, чтобы нежелательное сгибание было невозможным или возможным лишь замедленно, если в течение заданного отрезка времени не происходит сгибания коленного сустава или в пределах угла сгибания после произошедшего сгибания превышено установленное предельное значение горизонтального ускорения. Это служит для повышения надежности, если фаза маха прерывается, т.е. нельзя осуществить полный шаговый цикл.
Ниже пример осуществления изобретения более подробно поясняется со ссылкой на чертежи, на которых изображают:
фиг. 1: схематично протезный коленный сустав;
фиг. 2: схематично упор разгибания;
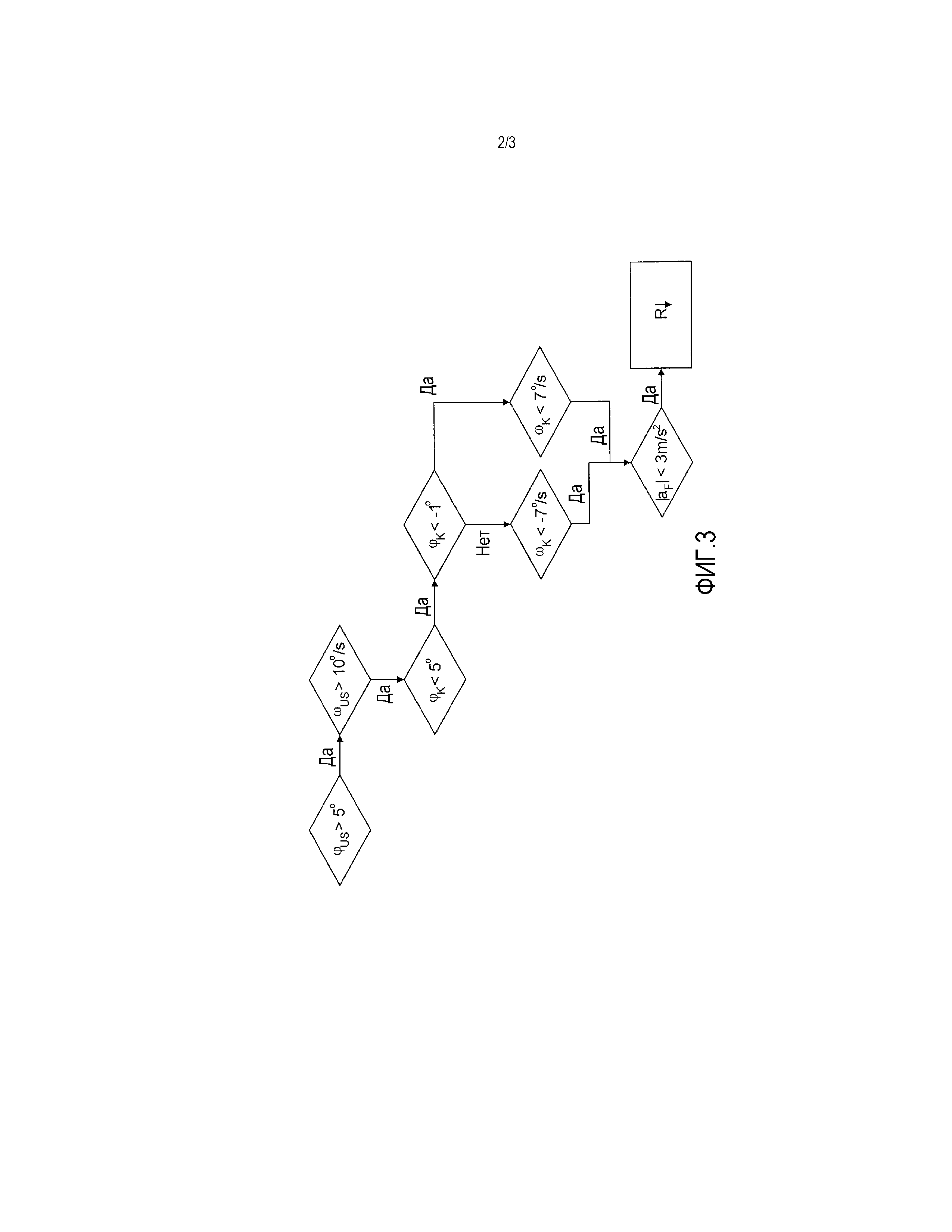
фиг. 3: пример процесса управления;
фиг. 4: схематично концепцию управления.
На фиг. 1 изображено протезное устройство для пациентов с культей бедра и отсутствующими коленным суставом и голенью. Гильза 1 протеза, называемая также компонентом бедра протеза или бедренной гильзой, служит для приема культи (не показана). На гильзе 1 протеза расположен протезный коленный сустав 2, который в данном случае выполнен в виде моноцентрического коленного сустава, а вокруг оси поворота с возможностью поворота относительно бедренной гильзы 1 установлен компонент 3 голени. На дистальном конце компонента 3 голени расположен протез ступни 4. Протезное устройство изображено на терминальной фазе стояния, а протез ступни 4 находится еще на основании. Внутри компонента 3 голени расположено создающее сопротивление устройство 5, которое создает сопротивление сгибанию, т.е. флексии, и служит также для изменяемой настройки сопротивления разгибанию, т.е. сопротивления экстензии. Сопротивление внутри создающего сопротивление устройства 5 изменяется посредством исполнительного элемента, который, например, открывает или закрывает клапаны или перенаправляет потоки гидравлической жидкости. В качестве альтернативы возможно, чтобы исполнительный элемент изменял реологические свойства гидравлической жидкости, чтобы изменить сопротивление. Возможны альтернативные изменения сопротивления, например активирование тормозов или преобразование кинетической энергии в электрическую энергию.
На компоненте 3 голени расположен инерциальный датчик 31, который записывает абсолютный угол ϕus компонента голени. Инерциальный датчик 31 изменяет абсолютный угол ϕus компонента 3 голени относительно вертикали и может быть выполнен в виде 2D- или 3D-датчика магнитного поля, 2D- или 3D-датчика ускорения или в виде гироскопа. Абсолютный угол ϕus увеличивается при возрастании наклона компонента 3 голени в направлении ходьбы вперед, т.е. при повороте вокруг дистальной точки контакта с основанием по часовой стрелке. На компоненте 3 голени расположен также датчик 12 ускорения, посредством которого можно определить тангенциальное ускорение аТ, т.е. ускорение тангенциально к радиусу поворота компонента 3 голени, и радиальное ускорение aR коленного сустава 2, т.е. ускорение в направлении дистального центра вращения компонента 3голени. Можно также регистрировать с помощью соответствующего датчика, например 3D-датчика ускорения, дополнительно медиальное и латеральное ускорения или только эти ускорения.
Наконец предусмотрен датчик 11 угла колена, с помощью которого можно определить угол ϕK колена. Угол ϕK колена рассматривается положительно возрастающим от продолжения продольной протяженности компонента 3 голени в направлении сгибания и равен 0, если продольная протяженность гильзы 1 протеза совпадает с осью продольной протяженности компонента 3 голени. Гиперэкстензия, т.е. чрезмерное разгибание в направлении экстензии считается отрицательным углом ϕK колена.
Протезный коленный сустав 2 может иметь упругий упор разгибания, схематично изображенный на фиг. 2. Помимо схематичных гильзы 1 бедра и компонента 3 голени, установленных с возможностью поворота по отношению друг к другу вокруг оси сустава, на верхней части протезного коленного сустава 2 расположена контропора 10. Контропора 10 выполнена, в основном, жесткой и в разогнутом состоянии, как на фиг. 2, к ней прилегает упругий упорный элемент 30. Незначительная гиперэкстензия обеспечивается за счет выполнения пружины, а зная характеристику пружины упорного элемента 30, можно по углу ϕK колена рассчитать действующий в направлении экстензии момент колена. Разумеется, можно также расположить контропору 10 на компоненте голени, а упругий упорный элемент – на верхней части 1.
Для управления активированием фазы маха можно привлечь несколько параметров, а именно наклон вперед компонента 3 голени, т.е. положительный абсолютный угол ϕus компонента 3 голени, вращение вперед голени в направлении ходьбы, т.е. возрастание абсолютного угла ϕus компонента 3 голени, ускорение коленного сустава, чтобы, в частности, определить состояние движения протезной стопы 4 на уровне ступни, а также угол φK колена и угловую скорость ωK колена, которую можно рассчитать по первой временнóй производной угла ϕK колена.
На фиг. 3 схематично изображен процесс управления. Чтобы активировать фазу маха и уменьшить сопротивление R сгибанию устройства 5 создания сопротивления, прежде всего, определяется наклон вперед, т.е. положительный абсолютный угол ϕus компонента 3 голени относительно вертикали. Если абсолютный угол ϕus выше установленного предельного значения, например 5°, то выполнено первое условие активирования фазы маха. Если, кроме того, обнаруживается еще вращение вперед в виде угловой скорости ωus компонента голени, то можно предположить, что голень находится в движении, а в качестве предельного значения можно взять, например, вращение вперед >10°/с. Если эти значения достигнуты или превышены, то проверяется, соответствует ли угол ϕK колена установленному предельному значению. На терминальной фазе стояния, которая наступает перед активированием фазы маха, протезный коленный сустав 2 находится в разогнутом или почти разогнутом положении, а у упругого упора разгибания может произойти даже гиперэкстензия. Если угол ϕK колена меньше предельного значения, которое составляет <5° и может принимать даже отрицательные значения, то имеет место дополнительное условие активирования фазы маха. По углу ϕK колена и известным данным пружинящего устройства в упругом упоре разгибания можно рассчитать действующий в направлении экстензии момент колена.
В случае отрицательного угла ϕK колена, т.е. в случае гиперэкстензии проверяется, насколько велика угловая скорость ωK колена. Если они ниже предельного значения, например ниже 10°/с, то можно предположить отсутствие сгибания и динамики колена или его лишь небольшие сгибание и динамику, что также характерно для терминальной фазы стояния. При отсутствии гиперэкстензии проверяется, не ниже ли отрицательная угловая скорость предельного значения, так что здесь запрашивается, насколько велика угловая скорость колена в направлении флексии или экстензии. Если определенные угловые скорости ωK колена ниже требуемых предельных значений, то вычисляется значение ускорения aF на уровне ступни, которое возникает на основе положения вектора ускорения относительно протезной стопы 4. Если ускорение aF на уровне ступни ниже предельного значения, например ниже 3 м/с2, то следует исходить из того, что кинематические условия контакта между протезной стопой 4 и основанием соответствуют кинематическим условиям терминальной фазы стояния и тем самым можно инициировать уменьшение сопротивления R устройства 5 создания сопротивления.
Для принятия однозначного решения между обкатыванием по протезной стопе 4 вперед, т.е. шагом вперед, и перемахом протеза под телом назад, например на фазе маха шага назад, необходимы шаги и запросы, возникающие после установления наклона вперед или вращения вперед компонента 3 голени. Для этого требуется гиперэкстензия протезного коленного сустава 2 против упругого упора экстензии 10, 30 или сильное разгибательное движение при небольшом угле ϕK колена, которое можно измерить датчиком 11 угла колена. Дополнительно с помощью датчика 12 ускорения определяется, прикладывается ли момент экстензии вокруг коленного сустава статически или динамически. При этом рассчитываются, в частности, линейные ускорения протеза на уровне ступни. При условии, что даны наклон вперед, т.е. положительный абсолютный угол ϕus, и вращение вперед компонента голени, можно с помощью ускорений и моментов колена можно сделать различия случаев, на основе которых сопротивление R сгибанию либо сохраняется на высоком уровне флексии на фазе стояния, либо уменьшается до уровня фазы маха.
Если вокруг протезного коленного сустава 2 отсутствует достаточный экстензионный момент или достаточный сгибающий момент, или если угловая скорость ωK колена либо разгибающая, либо протезный коленный сустав 2 находится в гиперэкстензии, то активирования фазы маха не может произойти.
Если протезный коленный сустав испытывает экстензионный момент вокруг оси колена вследствие динамических усилий, например вследствие сил инерции протезной стопы 4 и компонента 3 голени, то можно измерить гиперэкстензию в коленном суставе или разгибающее движение. Если тем самым компонент 3 голени движется, то эта ситуация соответствует ситуации качания, так что активирования фазы маха не происходит.
Активирование фазы маха происходит соответственно тогда, когда экстензионный момент вокруг оси колена вызван действующими на протезный коленный сустав статическими усилиями, такими как реакция опоры и усилия культи. В этом случае измеряется гиперэкстензия или сильно разгибающее движение коленного сустава, но не ускорение или лишь незначительное ускорение на уровне ступни. Такая ситуация характерна для терминальной фазы стояния, на которой протез при нагрузке обкатывается в направлении ходьбы по стопе. В этой ситуации сопротивление R уменьшается.
Характеристика упругой гиперэкстензии, в частности характеристика пружины упругого упора разгибания, а также пороговые значения угла ϕK колена, угловой скорости ωK колена и допустимых ускорений aF для активирования фазы маха должны выбираться так, чтобы, с одной стороны, можно было сделать однозначное различение того, происходит ли активирование фазы маха, а, с другой стороны, достигается ли даже при небольшой гиперэкстензии, например, у пользователей с небольшой массой тела в случае мелких шагов и медленных скоростей.
Если, например, в пределах первых 5° движения сгибания колена после активирования создающего сопротивление устройства 5 на уменьшенное сопротивление R сгибанию ускорение aF по своей величине установлено выше определенного порога, например, за счет удара о препятствие, сопротивление R сгибанию немедленно может быть снова переключено на высокое демпфирование флексии на фазе стояния, чтобы избежать нежелательного сгибания в экстренном случае.
Все измеренные сигналы датчиков могут быть отфильтрованы, чтобы компенсировать неточности измерения. Для условий ускорения могут быть установлены асимметричные предельные значения, чтобы можно было осуществить индивидуальную подгонку к данной ситуации ходьбы и направлениям движения.
Описанное управление обходится без непосредственных измерений усилий и тем самым можно отказаться от восприимчивых при известных условиях и трудно оцениваемых датчиков усилий. В качестве датчиков используются исключительно датчики угла колена, датчики инерциального угла, такие как гироскопы, и датчики ускорения. С помощью этих датчиков можно легко определять условия моментов вокруг оси колена, в частности в направлении экстензии, за счет того, что регистрируют и кладут в основу расчета параметры упругого упора разгибания.
Легко рассчитываемые линейные и угловые ускорения привлекаются для расчета состояния движения протеза, в частности, чтобы идентифицировать состояние движения протезной стопы 4. За счет логической связи усилий и моментов с ускорениями можно различать между статическими и динамическими усилиями и моментами, так что благодаря такому различению можно определить характер ходьбы. Таким образом, можно легко различить, имеет ли место свободный перемах или терминальная фаза стояния.
Управление описанным способом обеспечивает к тому же надежное активирование фазы маха даже при медленных скоростях ходьбы, мелких шагах и мягких основаниях, таких как рыхлый песок или снег. Управление не зависит от массы пациента и может обеспечить надежную ходьбу назад.
На фиг. 4 схематично изображена концепция управления протезным коленным суставом, конструктивное выполнение протеза соответствует конструктивному выполнению на фиг. 1, и, в принципе, использовать концепцию управления можно также в ортезах, в частности в так называемом KAFO (колено-голеностопный ортез ноги). Гильза 1 протеза или компонент бедра соединен протезным коленным суставом 2 с компонентом 3 голени. На дистальном конце компонента 3 голени расположена протезная стопа 4. Внутри компонента 3 голени находится создающее сопротивление устройство 5. Справа рядом со схематичным протезным устройством показан упругий упор разгибания, который может быть расположен, в частности, внутри создающего сопротивление устройства 5. Протезное устройство находится в разогнутом положении шага на терминальной фазе стояния, т.е. в зоне плюсны возникает точка 6 опоры и вращения, вокруг которой вращается протезное устройство. За счет рычага между продольной осью компонента 3 голени и точкой 6 опоры вокруг коленного сустава 2 прикладывается экстензионный момент, который приводит к тому, что подвижная в этом случае контропора 10 в качестве части гидропоршня прижимается к упорному элементу 30 в виде пружины. В то же время регистрируется, имеет ли протезное устройство наклон вперед, что обозначено изогнутой стрелкой. В случае наличия абсолютного угла ϕus, т.е. в данном примере наклона по часовой стрелке, и если происходит вращение вперед, т.е. возрастание абсолютного угла ϕus в направлении ходьбы вперед, причем вращение происходит вокруг дистальной точки 6 опоры, то имеются дополнительные критерии для определения моментального состояния и фазы в пределах шагового цикла или шагового процесса. Экстензионный момент может быть рассчитан за счет характеристики пружины упорного элемента 30 и угла колена, в данном случае отрицательного угла ϕK колена.
Чтобы исключить свободный мах компонента голени вокруг коленного сустава, определяется линейное ускорение aF в точке 6 опоры. Если это ускорение равно 0 или очень мало, то можно исходить из того, что протезная стопа 4 и точка 6 опоры имеют контакт с основанием, так что в точке 6 опоры имеется стационарная точка вращения. Нагрузка квазистатическая. При статической нагрузке, наклоне вперед, вращении вперед и при определенных условиях гиперэкстензии, когда разгибающий момент не превышает предельного значения Х, сопротивление R сгибанию создающего сопротивление устройства 5 уменьшается, так что может легко произойти сгибание протезного коленного сустава 2.
Реферат
Изобретение относится к медицине. Способ управления искусственным ортезным или протезным коленным суставом, на котором расположен компонент голени и который снабжен оказывающим сопротивление устройством, в котором сопротивление R сгибанию изменяют в зависимости от данных датчика, определяемых во время использования ортезного или протезного коленного сустава по меньшей мере одним датчиком. Определяют линейное ускорение aкомпонента голени и определенное линейное ускорение aсравнивают по меньшей мере с одним пороговым значением. При достижении порогового значения линейного ускорения aкомпонента голени уменьшают сопротивление R сгибанию. Изобретение обеспечивает возможность с небольшими затратами на управление достичь надежного характера ходьбы. 12 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ управления коленным сочленением протеза ноги и устройство для его осуществления
Способ управления ортопедическим суставом
Комментарии