Протез ступни, система из протеза ступни и ботинка, а также способ подгонки высоты каблука протеза ступни - RU2686292C2
Код документа: RU2686292C2
Чертежи









Описание
Данное изобретение касается протеза ступни со стопой, проксимальным соединительным элементом, который соединен поворотно с указанной стопой, а также регулирующим устройством, посредством которого указанная стопа может переставляться относительно данного соединительного элемента. Данное изобретение касается также системы, состоящей из такого протеза ступни и ботинка, а также способа подгонки высоты каблука протеза ступни к ботинку, снабженному маркировкой высоты каблука.
При обеспечении протезами нижних конечностей необходимо, подготовить согласованную с соответствующим пациентом конструкцию. Под конструкцией понимают увязку и ориентирование всех компонентов протезов относительно друг друга. У пациента с протезом коленного сустава необходимо обеспечить точную ориентацию и позиционирование протеза коленного сустава и его поворотной оси, и выбрать длину трубки голени, а также подходящий протез ступни и смонтировать. В зависимости от пациента можно выбрать динамическую или надежную конструкцию. Чем дальше в фазе стояния результирующий вектор силы лежит перед осью колена, тем надежнее такая конструкция, и чем ближе результирующий вектор силы сдвинут к поворотной оси протеза коленного сустава, тем динамичнее является конструкция. Если конструкция надежна, то уменьшается опасность самопроизвольного сгибания протеза коленного сустава, однако, при ходьбе необходимы сравнительно высокие затраты энергии. Динамичная конструкция облегчает сгибание протеза коленного сустава в фазе стояния как при толчке пяткой, так и в конце фазы стояния, а также в фазе поворота. Для ходьбы пользователю необходим сравнительно небольшой расход силы, однако, возникает склонность к тому, что протез коленного сустава сгибается легче, что в некоторых ситуациях может быть нежелательным.
Наряду с конструкцией протеза коленного сустава не следует недооценивать роль протеза ступни, так как посредством протеза ступни создается контакт с основанием. Протез ступни может иметь самые различные варианты выполнения, от простой колодки с полимерной оболочкой до гидравлически управляемого, снабженного приводом протеза ступни, что предоставляет многогранные возможности. На обычные протезы ступней можно надевать ботинки, и они могут иметь поэтому внешний вид, приближенный к нормальной форме ступни. Спортсмены, как правило, не носят ботинок. Проблема для пользователей протезов нижних конечностей заключается в том, что при замене ботинка требуется выполнить подгонку протеза ступни к изменяющейся высоте каблука по сравнению со стандартной установкой или с первоначальной установкой. Техник-ортопед устанавливает оптимальную конструкцию протеза на стандартное значение высоты каблука до тех пор, пока не потребуется другая высота каблука при выборе другого ботинка или другой модели обуви, например, с другим подъемом пятки и с другой высотой каблука, тогда может оказаться необходимым изменить наклон протеза ступни по отношению к трубке голени, чтобы произвести подгонку высоты каблука. В другом случае меняется вся конструкция протеза. Установка высоты каблука тоже может быть необходима и в том случае, если используются геометрически одинаковые ботинки. Вследствие различной жесткости подошвы может оказаться необходимым, чтобы была установлена другая высота каблука. При более мягкой пятке обуви может потребоваться иная высота каблука по сравнению с более твердой пяткой.
Из уровня техники известны протезы ступней, располагающие гидравлическим регулирующим устройством, так что техник-ортопед может произвести подгонку протеза ступни к измененной высоте каблука. Недостаток таких решений заключается в том, что для каждой замены ботинка в принципе нужно искать техника-ортопеда с той целью, чтобы обеспечить статически и динамически правильную конструкцию. Кроме того, воспроизводимость результатов регулировки не гарантируется.
Фирмой Freedom Innovations предлагается протез ступни под названием „Runwayʺ. Установка производится по выбору посредством перестановки нажимной кнопки или ключом с внутренним шестигранником.
Фирма Streifeneder предлагает сменный протез ступни с интегрированным устройством перестановки высоты каблука под наименованием „Accentʺ, посредством которого может быть достигнута перестановка по высоте вплоть до 51 мм.
Задача данного изобретения заключается в том, чтобы подготовить протез ступни, систему, состоящую из протеза ступни и ботинка, а также предложить способ подгонки высоты каблука протеза ступни к ботинку, посредством которых пользователь протеза ступни может подогнать протез ступни к соответствующему ботинку, причем выполнение такой установки является воспроизводимым, благодаря чему сохраняется оптимизированная конструкция протеза.
Согласно изобретению эта задача решается за счет протеза ступни с признаками независимого пункта 1 формулы изобретения, за счет системы, состоящей из протеза ступни и ботинка и имеющей признаки, изложенные в независимом пункте 15 формулы, а также за счет способа, охарактеризованного в независимом пункте 17 формулы изобретения. Предпочтительные варианты осуществления и модификации данного изобретения раскрыты в зависимых пунктах формулы, в описании и прилагаемых чертежах. Данное изобретение дает возможность предоставить в распоряжение улучшенные протезы. У пациентов с транстибиальной ампутацией неправильная установка высоты каблука ведет к повреждениям капсул и связок, как на обслуживаемой, так и на не обслуживаемой ноге, а при трансферморальных ампутациях не оптимизированная установка высоты каблука и изменение конструкции протеза может привести к растяжениям в капсульном и связочном аппаратах колена не обслуживаемой ноги, а также к чрезмерным нагрузкам на отдельные мышцы. Посредством данного изобретения указанные недостатки минимизируются или предотвращаются.
Предлагаемый изобретением протез ступни, содержащий стопу, проксимальный соединительный элемент, который поворотно соединен с указанной стопой, и регулирующее устройство, с помощью которого стопа может быть переставлена по отношению к указанному соединительному элементу, предусматривает, что регулирующее устройство снабжено по меньшей мере одним датчиком положения, который связан с элементом, вырабатывающим сигнал. Для установки высоты каблука необходимо изменить наклон стопы по отношению к соединительному элементу. Исходя из высоты каблука, установленной техником-ортопедом, конструкция протеза оптимизируется техником-ортопедом. Если на основании исходного положения эта стопа при измененной высоте каблука изменяется в плюсневом направлении, т.е. кончики пальцев ноги поворачиваются по направлению к полу, так что пятка будет относительно приподнята, то датчик положения детектирует угловое положение этой стопы относительно проксимального соединительного элемента, которым протез ступни закрепляется на трубке голени. Элемент, вырабатывающий сигнал, может быть выполнен также как активный элемент, вырабатывающий сигнал, и в зависимости от сигнала, от датчика положения передается на элемент, вырабатывающий сигнал, например, после оценки в управляющем блоке, выдает оптический, акустический или тактильный сигнал, так что пользователь протеза знает, какая ступень установки высоты каблука имеет место в настоящее время. Такая подача сигнала может осуществляться акустически, например, посредством устройства речевого вывода, с помощью которого указывается соответственно достигнутое распределение по уровням высота каблука. Точно так же возможно, чтобы после достижения каждого следующего уровня высоты каблука выдается тональный сигнал, причем различным уровням высоты каблука могут соответствовать различные тональные сигналы. Можно также, чтобы различные высоты звуков, образцы сигналов или же последовательности сигналов соответствовали каждому уровню каблука. Если имеется, например, шесть уровней высоты каблука, то каждый из них может характеризоваться соответствующим количеством тонов: третий уровень тремя следующими друг за другом тональными сигналами, четвертый уровень - четырьмя сигналами, и т.д. Наряду с выдачей акустических сигналов возможна выдача тактильных сигналов, например, посредством вибраций, комбинации различных форм вибраций или т.п. Кроме того, в порядке альтернативы или дополнительно можно выдавать оптический сигнал, например, световой сигнал, комбинацию световых сигналов или при необходимости визуальное отображение имеющегося в данный момент уровня высоты каблука. Все сигналы могут применяться для каждого уровня альтернативно или кумулятивно. Можно также для различных уровней высоты каблука выдавать различные виды сигналов, например, определенные уровни высоты каблука могут отображаться только акустически, другие только оптически, и опять же, какие-то только гаптически. Оптическое отображение может происходить, например, с помощью различных цветовых сигналов. Благодаря такой выдаче сигналов больше не нужно искать техника-ортопеда для каждого изменения высоты каблука, более того, достаточно для разных высот каблука привести в соответствие указанные сигналы с уровнями высоты каблука, так что после первой установки конструкции протеза и при необходимости увязывания различных каблуков с различными значениями высоты каблука с соответствующими сигналами пациент сможет самостоятельно при знании соответствующей высоты каблука каждой модели обуви произвести подгонку протеза ступни к конкретной высоте каблука. Помимо описанных активных элементов выдачи сигналов и устройств вывода возможны также и предусматриваются пассивные элементы, вырабатывающие сигналы, которым не требуется никакого специального источника энергии для производства сигналов. Например, за счет растрирования при перестановке может выдаваться тактильный сигнал через так называемые «дробинки» (неравномерная рябь), так что пользователь протеза или техник-ортопед знают, на сколько растровых делений или уровней установки высоты каблука эта стопа была чрезмерно поднята относительно соединительного элемента. Помимо пассивного и тактильного устройства вывода, которые содержат также и акустические компоненты, возможно также, чтобы присутствовало оптическое отображение установки высоты каблука, например, посредством цветовой маркировки в смотровом окошке, отображение определенного фиксированного уровня посредством буквенно-цифровых знаков или иных символов.
Увязка этих сигналов, а также соответствующая установка высоты каблука могут осуществляться также и хронологически. Техник-ортопед и/или пациент могут использовать любую высоту каблука, чтобы корректно отрегулировать конструкцию протеза. Эта высота каблука затем в зависимости от момента времени установки будет приведена в соответствие с соответствующим сигналом. Первая установка отрегулированной высоты каблука происходит, например, при одноразовом тональном сигнале или одноразовом световом сигнале, или одноразовом тактильном сигнале. Вторая высота каблука, отличающаяся от первой высоты каблука, хронологически получает второй сигнал, например, два тональных сигнала, два световых сигнала или две выдачи тактильных сигналов. Третье запоминание высоты каблука получает третий сигнал и т.д., причем эти значения высоты каблука могут быть любыми, первая высота каблука может представлять собой средний каблук, второе запомненное значение соответствует высокому каблуку, а третье значение - очень плоскому каблуку.
Выдача сигнала высоты каблука посредством элемента, вырабатывающего сигнал, может происходить в абсолютных значениях, так что независимо от исходного положения сообщается о текущем принятом положении. Альтернативно этому выдача сигналов всегда может происходить исходя из стандартного начального положения, так что, например, после активации режима установки каждый раз выдается лишь число целых предпринятых уровней регулировки высоты каблука.
Регулирующее устройство может содержать фиксирующие элементы, посредством которых регулировка положения стопы по отношению к соединительному элементу производится дискретными шагами. Растрирование может быть выбрано достаточно тонким, так что может производиться максимально точная установка на соответствующие значения высоты каблука, с другой стороны, если выбрать растрирование настолько грубым, что будет выдаваться не слишком много сигналов, то при установке их можно будет перепутать. Оказалось достаточным, чтобы шаги высоты каблука составляли от 16 до 20 для эффективного изменения высоты каблука между 0см и 5см для достаточно тонкой регулировки высоты каблука при обычных моделях обуви.
Датчик положения может быть выполнен как сенсор положения, сенсор относительного угла, инерционный датчик измерения угла, механический сенсор и/или переключатель. При сенсоре относительного угла определяется относительное положение между соединительным элементом и стопой, например, с помощью расположенных через дискретные промежутки магнитов, по индукции, с помощью датчика Холла или т.п. Точно так же можно расположить различные маркеры друг относительно друга на дискретных угловых расстояниях, которые определяются детектором, и соответствующие сигналы посылаются от него либо прямо на элемент, вырабатывающий сигнал, либо на управляющее устройство. В отношении этого можно предусмотреть на стопе сенсор положения или инерционный датчик измерения угла, посредством которого определяется абсолютное положение стопы относительно неподвижного исходного параметра, как правило это направление силы гравитации. После одноразового ориентирования стопы, например, в положении без ботинка, можно затем путем изменения положения стопы относительно этого направления силы гравитации в режиме установки установить, на сколько градусов происходит перестановка в направлении подошвенного сгибания, на основании чего затем в сочетании с длиной протеза ступни высчитывается, при каком положении стопы достигается определенный шаг высоты каблука. Эта установка высоты каблука происходит, как правило, под нагрузкой, т.е. пациент у техника-ортопеда стоит равномерно нагруженным. Это означает, что, как правило, 50% веса тела несет на себе снабженная протезом нога и 50% несет на себе не снабженная протезом нога. Запоминание соответствующей установки высоты каблука для соответствующего ботинка или модели обуви происходит после статической и динамической подгонки конструкции протеза техником-ортопедом. Инерционный датчик измерения угла может быть выполнен в виде гироскопа. Возможно также, что датчик положения выполнен как простой выключатель, который замыкается механическим исполнительным элементом, так что схема размыкается или разрывается. В зависимости от размыкания или замыкания этой электрической цепи выдается соответствующий сигнал. Такие выключатели могут также активироваться отдельно, чтобы вызывать индивидуальную градацию, подобно механическому таймеру с активируемыми вручную моментами коммутации. Выполнение в виде механического сенсора предусматривает, что датчик положения может функционировать без электрических или электронных компонентов, например, за счет того, что отображение или акустический сигнал вырабатывается или изменяется чисто механическим способом. Принцип действия при этом соответствует выключателю, однако без замыкания или размыкания контактов.
Сенсорное устройство может быть связано с регулируемым или программируемым датчиком сигнала, так что могут задаваться как промежутки между выдаваемыми сигналами, так и вид соответствующего сигнала. Возможно также, что сигнал выдается только тогда и лишь в том случае, если произведена желаемая перестановка. Если, например, детектируется или устанавливается определенная высота каблука, то с помощью подтверждающего устройства может быть определено, что сигнал выдается лишь тогда, когда достигается соответствующее установленное положение высоты каблука. Таким образом возможно также посредством автоматического распознавания высоты каблука вызывать простую подгонку ориентирования стопы относительно проксимальных соединительных элементов, поскольку следует обращать внимание только на наличие или на отсутствие сигнала. Если корректная установка достигнута, то указанный сигнал выдается или, напротив, прерывается. Для пользователя протеза это является знаком того, что регулировку следует прервать и зафиксировать найденную позицию.
Указанное регулирующее устройство может быть снабжено по меньшей мере одним приемником или детектором идентификационных данных ботинка, так что может быть автоматически распознано, какая модель обуви или, соответственно, какая высота каблука установлена на соответствующем протезе ступни. Посредством приемника или детектора протез ступни распознает, в какой ботинок он был введен, так что происходит автоматическая подгонка датчика сигнала или управляющего устройства, так что упрощенная подгонка может производиться за счет автоматического детектирования соответствующей высоты каблука. Посредством детектора, например, автоматически распознается, какова высота каблука, так что с помощью управляющего устройства задается, что только при достижении определенного угла отклонения выдается соответствующий сигнал. Таким образом, прямая установка угла для стопы предпринимается автоматически и является воспроизводимой.
Приемник или детектор связаны с сенсорным устройством и/или с элементом, вырабатывающим сигнал, чтобы можно было осуществлять описанную выше автоматическую коррекцию либо указанного сигнала, либо подачи сигнала.
Элемент, вырабатывающий сигнал, точно так же может быть связан с передатчиком, так что детектированный сигнал датчика не должен выдаваться непосредственно на протезное устройство, но может сообщаться также на удаленно расположенное устройство. Например, может происходить передача сигнала на мобильный телефон, планшет, компьютер или иное устройство вывода, так что наряду с выдачей или отображением сигналов, которые на мобильных телефонах могут происходить как оптически, так и акустически, и/или тактильно, может производиться и запоминание значений и используемых ботинок или, соответственно, установок высоты каблука. Образующиеся таким образом базы данных могут быть использованы для оптимизации настройки такой конструкции протеза.
Регулирующее устройство может содержать вал, который эксцентрично установлен на стопе и который, в свою очередь, установлен на соединительном элементе. Благодаря этому простым образом предоставляется возможность, путем проворачивания этого эксцентрикового вала вызывать регулировку проксимального соединительного элемента по отношению к стопе. Альтернативные варианты выполнения регулирующих устройств, например, посредством резьбовых штанг, фиксирующих устройств или других блокирующих устройств с геометрическим замыканием, тоже могут быть выполнены и предусмотрены. Вариант с эксцентриковым валом обеспечивает пространственно компактный вариант выполнения при достаточно тонкой регулировке и надежных блокирующих устройствах. Этот эксцентриковый вал может быть установлен в хомуте, на котором установлены также с возможностью поворота упомянутые соединительные элементы, благодаря чему возникает возможность выполнения эксцентрикового вала по существу параллельным поворотной оси и несущей оси соединительных элементов. Для того, чтобы скомпенсировать возникающее при проворачивании продольное смещение эксцентрикового вала, указанный вал предпочтительно введен в направляющей в виде удлиненного отверстия в соединительном элементе. Удлиненное отверстие может проходить насквозь через соединительные элементы. Разумеется, возможно и предусматривается, что указанный эксцентриковый вал установлен на соединительном элементе и связан с этим соединительным элементом. Может быть также, что эта направляющая в виде удлиненного отверстия выполнена не в соединительном элементе, а в стопе. Регулирующее устройство, таким образом, посредством эксцентрично установленного вала связано с соединительным элементом, причем этот вал предпочтительно перемещается в направляющей в виде удлиненного отверстия.
Соединительный элемент может иметь дезактивируемое фиксирующее устройство, которое блокирует проворачивание стопы относительно соединительного элемента, так что однажды подобранная ориентация стопы относительно этого соединительного элемента сохраняется. Фиксирующее устройство содержит предпочтительно расцепляемые элементы геометрического замыкания, так что активирование или, соответственно, дезактивирование может быть осуществлено простым образом.
Элемент, вырабатывающий сигнал, выполнен предпочтительно в виде активного элемента, вырабатывающего сигнал, чтобы пользователь получал однозначный и просто воспринимаемый сигнал об установленной высоте каблука.
Система из вышеописанного протеза ступни с ботинком предусматривает наличие на ботинке считываемой маркировки высоты каблука, так что или оптическими, оптоэлектронными или электронными средствами имеющийся уровень высоты каблука считывается, передается на управляющее устройство, на датчик положения или на элемент, вырабатывающий сигнал, и затем соответствующий сигнал может выдаваться при достижении корректной установки высоты каблука. Маркировка высоты каблука может быть записана на чипе радиочастотной идентификации (RFID-Chip), транспондере, в коде, считываемом оптическими или оптоэлектронными средствами. Маркировка высоты каблука может быть также наклеена на ботинок, вытиснена на нем, заделана в него или нанесена каким-то иным способом.
Предлагаемый изобретением способ подгонки высоты каблука протеза ступни, описанного выше, к ботинку, снабженному маркировкой высоты каблука, предусматривает, что эта маркировка высоты каблука сообщается на управляющее устройство, которое сравнивает соответствующую маркировку с данными о положении, определенными датчиком положения, и выдает подтверждающий сигнал, если заранее приданный соответствующей маркировке высоты каблука сигнал о положении будет соответствовать измеренному сигналу о положении. Эта маркировка высоты каблука может быть в зависимости от приближенности распознана детектором, и соответствующий сигнал передается на управляющее устройство, например, если детектор или передатчик оказываются в достаточной близости или в прямом контакте с этой маркировкой высоты каблука. Возможно также с помощью оптических детекторов, например, сканеров считывать соответствующий код и передавать его на управляющее устройство, так что после считывания и обработки этого соответствующего кода происходит соответствующее отождествление сигнала и выдача сигналов.
Помимо автоматического определения и считывания маркировки высоты каблука и автоматической передачи на управляющее устройство в принципе возможно также соответствующую высоту каблука вручную передавать на управляющее устройство, например, путем ощупывания, дистанционного обслуживания или растрирования, или подтверждения определенного закрепленного положения.
В одном варианте данного изобретения протез ступни снабжен приводом, так что соединительный элемент перемещается относительно стопы с помощью двигателя, причем это перемещение происходит в зависимости от детектированной высоты каблука, так что всегда происходит автоматическая подгонка положения стопы относительно соединительного элемента при надевании ботинка с соответствующей маркировкой высоты каблука.
В дальнейшем примеры осуществления данного изобретения будут разъяснены подробнее с привлечением прилагаемых фигур. На фигурах показано следующее:
Фиг. 1 - протез ступни в ботинке;
Фиг. 2 - сменный протез ступни, вид сбоку;
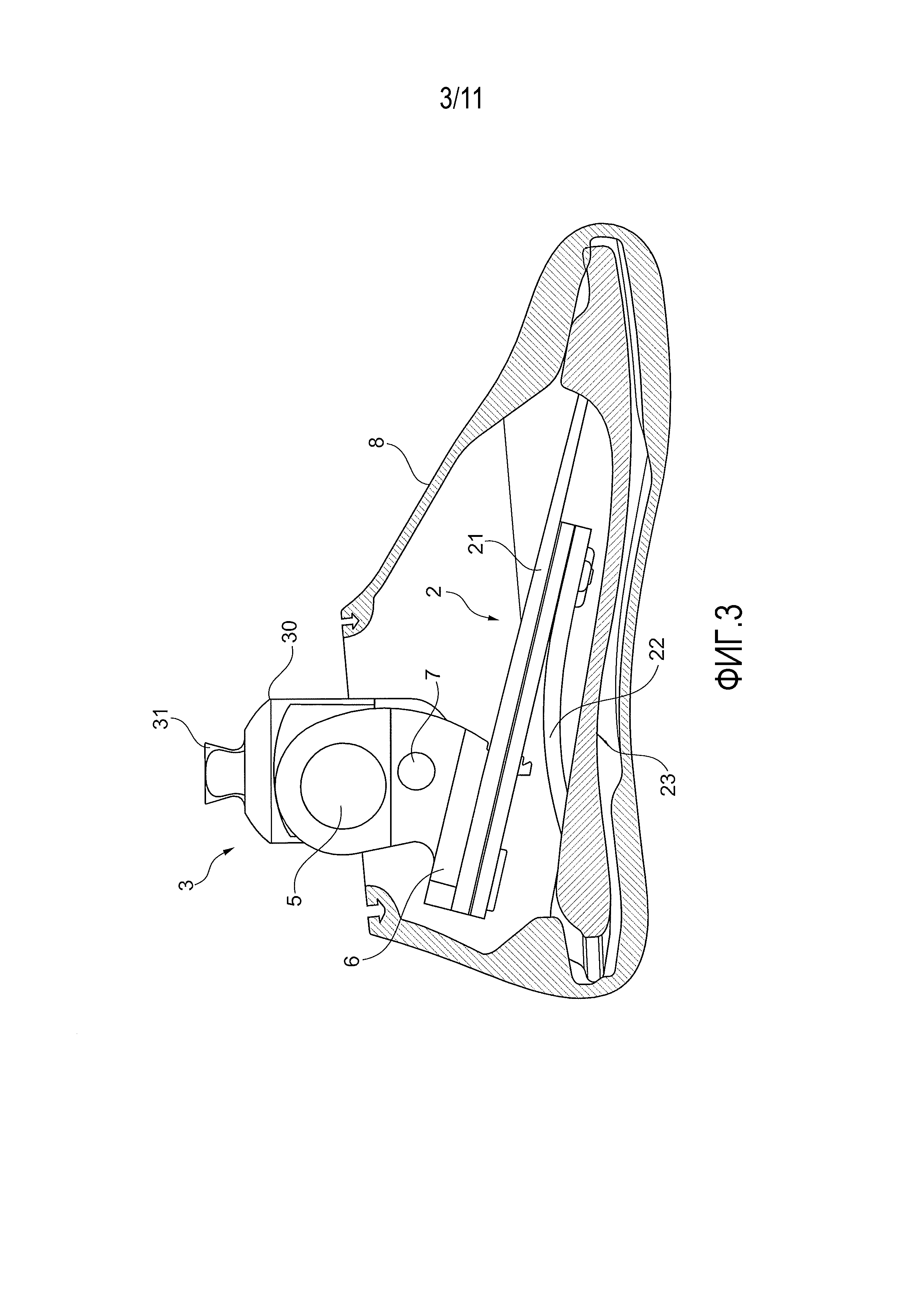
Фиг. 3 - сменный протез ступни по Фиг. 2 с «косметикой» протеза;
Фиг. 4 - смещенный сменный протез ступни;
Фиг. 5 - сменный протез ступни по Фиг. 4 с «косметикой» протеза;
Фиг. 6 - хомут с соединительным элементом, вид сбоку;
Фиг. 7 - по Фиг. 6, вид в перспективе;
Фиг. 8 - разнесенное изображение регулирующего устройства;
Фиг. 9 - вид в разрезе регулирующего устройства;
Фиг. 10 - один вариант данного изобретения, вид сбоку; а также
Фиг. 11 - детальное изображение датчика положения.
На Фиг. 1 показан ботинок 1 с находящимся в нем протезом ступни, содержащим стопу 2 и проксимальные соединительные элементы 3 для подсоединения к трубке 4 голени. Указанные проксимальные соединительные элементы 3 установлены с возможностью проворачивания на стопе 2 и содержат регулирующее устройство 5, посредством которого может быть установлен наклон стопы 2 относительно соединительного элемента 3 или, соответственно, относительно трубки 4 голени. Путем установки наклона стопы 2 при замене ботинка могут быть скомпенсированы различные значения высоты каблука. В ботинке 1 размещена маркировка 11 высоты каблука, в представленном примере осуществления в области каблука, и с ее помощью можно распознать конкретную высоту каблука и либо вручную, либо автоматически передать на регулирующее устройство 5 или, соответственно, на не представленное на Фиг. 1 управляющее устройство, на элемент 10, вырабатывающий сигнал, или на сенсорное устройство. В регулирующем устройстве 5 элемент, вырабатывающий сигнал, установлен в форме устройства вывода для акустических, тактильных и/или оптических сигналов, по которым пользователь протеза может быть проинформирован о соответствующей установке высоты каблука.
На Фиг. 2 показан сменный протез ступни без протезной «косметики» со стопой 2, которая имеет пружину 21 передней части стопы, пяточную пружину 22 и базовую пружину 23. На заднем конце пружины 21 передней части стопы установлен хомут 6, который проходит в проксимальном направлении и предназначен для приема проксимального соединительного элемента 3. Этот хомут 6 прочно привинчен к пружине 21 передней части стопы. Соединительный элемент 3 имеет основное тело 30 с пирамидальной переходной частью 31. Нижняя часть 32 закреплена на основном теле 30 и служит гнездом для поворотной оси 7, которая проходит через хомут 6 поперечно. Соединительный элемент 3 установлен между обоими плечами хомута 6 с возможностью поворота вокруг поворотной оси 7. Кроме того, в хомуте 6 проксимально относительно поворотной оси 7 установлено регулирующее устройство 5, конструкция которого будет разъяснена позднее. С помощью этого регулирующего устройства 5 можно изменять угловое положение стопы 2 относительно соединительного элемента 3. За счет различных наклонов соединительного элемента 3 относительно стопы 2 могут быть скомпенсированы различные значения высоты каблука для не представленных ботинок.
На Фиг. 3 показан сменный протез ступни по Фиг. 2 с протезной «косметикой» 8, в которую этот сменный протез ступни введен вместе с хомутом 6 и частями соединительного элемента 3. Сменный протез ступни вместе с протезной «косметикой» образуют протез ступни, который вставляется в ботинок. Указанная протезная «косметика» 8 образует дистальное завершение протеза ступни и вследствие своих упругих свойств способствует улучшению рабочих характеристик протеза ступни. В представленном примере осуществления ориентация соединительного элемента 3 относительно стопы 2 выбрана таким образом, что имеет место относительно плоская высота каблука; подошва или нижняя сторона протезной «косметики» 3 в своих точках прилегания примыкает почти на горизонтальном уровне.
На Фиг. 4 показан вариант по Фиг. 2 в максимально согнутом положении, это значит, что стопа 2 имеет максимальное подошвенное сгибание, и соединительный элемент 3 максимально повернут вокруг поворотной оси 7 против направления часовой стрелки относительно хомута 6. Кончики пальцев ноги находятся существенно ниже, чем пятка. Такое положение стопы необходимо, если на другой или, соответственно, не снабженной протезом стороне пациента надет ботинок с высоким каблуком. Если бы такое положение стопы по Фиг. 2 использовалось при увеличенной высоте каблука, то это привело бы к неудобному для пользования характеру перекатывания и очень нефизиологичной походке.
На Фиг. 5 показано положение стопы по Фиг. 4 с протезной «косметикой».
Для того, чтобы можно было использовать положения стоп согласно Фиг. 3 и 5 вместе с отрегулированной техником-ортопедом конструкцией протеза, необходимо обеспечить регулируемость высоты каблука. Для этого предусмотрено регулирующее устройство 5 в области соединительного элемента 3 на опорном узле.
На Фиг. 6 показано соединение верхнего соединительного элемента 3 с пирамидальной переходной частью 31, с основным телом 30 и нижней частью 32 на хомуте 6 в виде отдельного изображения. Проксимальную поворотную ось 7 можно точно так же распознать, как и расположенное дистально по отношению к ней регулирующее устройство 5. На Фиг. 6 показан вид сбоку несущей конструкции 61 или плеча хомута с имеющей круговую форму выемкой, в которой установлено упорное кольцо 52. Принцип действия этого упорного кольца 52 и регулирующего устройства 5 ниже поясняется более подробно.
На Фиг. 7 показано устройство по Фиг. 6 в изометрии. Можно увидеть, что нижняя часть 32 зафиксирована на основном теле 30, и как основное тело 30, так и эта нижняя часть 32 расположены между двумя несущими конструкциями 61, 62 или плечами хомута 6. Регулирующее устройство 5 на стороне второй несущей конструкции 62 имеет защитный колпачок 54, обеспечивающий защиту различных компонентов регулирующего устройства 5. В представленном примере осуществления соединительный элемент 3 выполнен как основное тело 30 с закрепленной прямо на нем пирамидальной переходной частью 31. Помимо такого варианта выполнения можно также между пирамидальной переходной часть 31 и хомутом 6 или стопой 2 предусмотрен переходник, например, для более простого проведения продольной регулировки или для размещения в переходнике компонентов регулирующего устройства 5. Так, в этом переходнике могут быть размещены устройство вывода, управляющее устройство, задающее устройство для программирования соответствующей высоты каблука и увязки с сигналом. Сама эта регулировка тоже может быть проведена в переходнике, так что нет необходимости обязательно располагать, выполнять или закреплять непосредственно на основном теле 30 регулирующего устройства 3 указанную пирамидальную переходную часть 31. Эта пирамидальная переходная часть 31 может быть также с помощью промежуточно включенной проставки или переходника, или основным телом 30, или каким-то иным образом поворотно соединена со стопой 2, например, посредством хомута 6 или иным видом поворотного крепления закреплена на стопе 2. Помимо расположения верхнего соединительного элемента 3 между обеими несущими конструкциями 61, 62 в хомуте можно также основное тело 30 лишь одной стороной расположить на единственной несущей конструкции, или же центральную несущую конструкцию с обеих сторон обложить компонентами верхнего соединительного элемента 3, так что может быть реализована инверсивная конструкция по сравнению с представленным примером осуществления.
На Фиг. 8 показано разнесенное подетальное изображение хомута 6 со сквозными отверстиями 67 в дистальной области несущей конструкции 61, 62 для приема поворотной оси 7. Поворотная ось 7 установлена в опорах 70, которые выполнены в виде подшипников скольжения, в указанных сквозных отверстиях 70. Поворотная ось 7 в смонтированном состоянии проходит как через несущую конструкцию 61, 62, так и через сквозные отверстия 37 внутри нижней части 32, так что нижняя часть 32, которая посредством болтов 34 привинчена к основному телу 30, поворотно установлена на хомуте 6. Поворотная ось 7 представляет собой при этом ось вращения.
Над этими сквозными отверстиями 67, т.е. в проксимальном направлении, размещены дополнительные опорные отверстия 65, у которых в правой несущей конструкции 62 на наружной стороне выполнена внутренняя зубчатая нарезка 63. Внутри этих опорных отверстий 65 расположены кольца 50 подшипников, которые тоже выполнены как подшипники скольжения, и принимают упорные кольца 52 эксцентрично установленного вала 51. Вал 51 движется в направляющей в виде удлиненного отверстия 33, которое выполнено как сквозная прорезь, в которой движется основное тело 30 и при проворачивании внутри упорных колец 50 вызывает поворачивание соединительного элемента 3 вокруг поворотной оси 7. Если этот вал 51 поворачивается, например, из исходного положения в направлении заднего конца протеза ступни, и соединительный элемент 3 откидывается относительно назад, так что происходит подошвенное сгибание стопы 2, то вал 51 поворачивается в направлении кончиков пальцев ноги, и это вызывает дорсальное сгибание, т.е. кончики пальцев ноги приподнимаются в направлении протеза коленного сустава.
На правом в этом примере осуществления упорном кольце 52 выполнена наружная зубчатая нарезка 53, изготовленная корреспондирующей с внутренней зубчатой нарезкой 63 на несущей конструкции 62, так что при вхождении в зацепление указанных зубчатых нарезок 53, 63 проворачивание упорных колец 52 в опорных отверстиях 65 блокируется. Благодаря этому вал 51 не может двигаться, и соединительный элемент 3 зафиксирован в установленной позиции. Для снятия этой блокировки или отпускания фиксирующего устройства, которое образуется за счет зубчатых нарезок 53, 63, производится нажим на левое упорное кольцо 52, так что как вал 51, так и правое упорное кольцо 52 перемещаются в направлении к защитному колпачку 54. Благодаря этому наружная зубчатая нарезка 53, которая воздействует на внутреннюю зубчатую нарезку 63 как элементы геометрического замыкания, выводится из зацепления и выдавливается, так что может быть предпринято свободное поворачивание упорных колец 52 внутри опорных отверстий 65.
На Фиг. 8 можно видеть также датчик 9 положения, который детектирует положение стопы 2, которая привинчиванием прочно соединена с хомутом 6, относительно соединительного элемента 3. Датчик 9 положения может быть выполнен либо как сенсор положения, который детектирует ориентацию стопы в пространстве во время режима установки, либо как относительный датчик, который исходя из исходного положения детектирует относительное положение стопы 2 по относительному положению хомута 6 относительно соединительного элемента 3.
На датчике 9 к тому же установлен регулируемый датчик 91 сигнала, посредством которого может быть установлено, когда будет выдан сигнал о положении датчика 9, чтобы можно было вызвать предварительный выбор выдаваемых сигналов.
Датчик 9 предпочтительно выполнен как датчик Холла, у которого либо магнит перемещается относительно множества катушек, либо много магнитов движутся относительно одной катушки вследствие вращения вала 51 или упорных колец 52 относительно этого датчика 9. Вследствие эффекта Холла генерируется сигнал, который оценивается, и на этом основании производится выдача сигналов посредством устройства 10 вывода.
На Фиг. 9 показан вид в разрезе варианта выполнения, который по существу соответствует показанному на Фиг. 8. Датчик положения здесь не представлен. На Фиг. 9 показан соединительный элемент 3 в застопоренном состоянии. Хомут 6 посредством обеих указанных ориентированных по существу параллельно друг другу несущих конструкций 61, 62, между обеими этими несущими конструкциями 61, 62 вмещает указанный соединительный элемент 3, и, в частности, основное тело 30 и нижнюю часть 32. Поворотная ось 7 с помощью подшипников 70 поворотно установлена на хомуте 6. Внутри направляющей в виде удлиненного отверстия в основном теле 30 установлен в опорах эксцентриковый вал 51. Оба упорных кольца 52 поворотно установлены во вкладышах 50 подшипников в опорных отверстиях 65. Наружная зубчатая нарезка 53 на правом упорном кольце 52 входит в зацепление с внутренней зубчатой нарезкой 63 на правой несущей конструкции 62 и, тем самым, стопорит проворачивание соединительного элемента 3 вокруг поворотной оси 7.
Внутри защитного колпачка 54 установлена нажимная пружина 55, которая прижимает упорное кольцо 52 наружной зубчатой нарезкой 53 в направлении внутренней зубчатой нарезки 63. За счет этого фиксируется с геометрическим замыканием блокирующее устройство вала 51 относительно хомута 6. Для снятия блокировки этого блокирующего устройства нажимное усилие прикладывается с обращенной от защитного колпачка 54 стороны к упорному кольцу 52, так что вал 51 перемещается вправо, и зубчатые нарезки 53, 63 выводятся из зацепления.
Внутри этого защитного колпачка 54 установлено управляющее устройство 12, которое на основании принятого сигнала о положении датчика 9 положения активирует устройство 10 вывода для оптического и/или акустического, и/или гаптического сигнала. Устройство 10 вывода может, например, отображать уровень высоты каблука посредством ритмичного сигнала, точно так же можно предусмотреть устройство речевого вывода, или уведомить посредством подтверждающего сигнала о достижении предварительно установленной заданной позиции. Эта заданная позиция может быть задана с помощью управляющего устройства 12, например, за счет того, что детектор 19, например, RFID-приемник (приемник радиочастотной идентификации) принимает сигнал маркировки 11 высоты каблука и соотносит его с соответствующим угловым положением стопы 2 относительно соединительного элемента 3 в качестве заданной позиции. Если эта заданная позиция достигается при регулировке стопы 2 относительно соединительного элемента 3, то звучит подтверждающий сигнал, или выдается иной подтверждающий сигнал. Возможно также, что маркировка высоты каблука иным образом передается на управляющее устройство 12, например, вручную путем проворачивания исполнительного механизма, посредством повторяющегося нажатия или срабатывания выключателя, чтобы указать соответствующие уровни высоты каблука, с помощью речевого ввода, путем дистанционного обслуживания или каким-то иным образом. Также вручную могут быть активированы определенные выключатели или микровыключатели, так что при наличии соответствующего углового положения выдается подтверждающий сигнал или прерывается предупреждающий сигнал, который указывает на некорректную установку высоты каблука.
Управляющему 12 устройству придан передатчик 13, посредством которого можно передавать сигналы не представленного датчика 9 на удаленное устройство 10 вывода, например, мобильный телефон, компьютер или т.п. Управляющему 12 устройству, кроме того, придано подтверждающее 14 устройство, которое в представленном примере осуществления выполнено в виде кнопки управления в защитном колпачке 54. Кнопка 14 управления служит для того, чтобы при привязке соответствующей высоты каблука к сигналу производилось подтверждение. Если эта высота каблука, например, установлена хронологически, то первой установленной высоте каблука соответствует один сигнал, причем эта установленная высота каблука подтверждается с помощью кнопки 14 управления управляющего 12 устройства. Управляющее устройство 12 присваивает этой высоте каблука первый сигнал. Если устанавливается вторая высота каблука, и кнопка 14 управления снова срабатывает, то этой высоте каблука соответствует второй выдаваемый сигнал, независимо от того, больше вторая высота каблука или меньше, чем первая высота каблука. Если установка высоты каблука обнуляется, то она оказывается свободной и может задаваться вновь, и здесь тоже не существенно, запоминаются или упорядочиваются ли эти значения высоты каблука в какой-то определенной последовательности. После установки и подтверждения соответствующей высоты каблука и привязки соответствующего сигнала протез ступни можно использовать. Если ботинок меняется, то высота каблука переставляется, причем приводится в действие регулирующее устройство 5. Для этого зубчатые нарезки 53, 63 путем перемещения против силы сжатия пружины 55 выводятся из зацепления, и стопа 2 откидывается относительно соединительного элемента 3 до тех пор, пока не будет выдан сигнал. Этот сигнал может быть выдан пользователю посредством устройства 10 вывода в виде светового сигнала и посредством акустического сигнала датчика. Если желаемое положение стопы 2 относительно соединительного элемента 3 достигнуто, то указанные зубчатые нарезки 53, 63 фиксируются. Как только произошла эта фиксация, может быть выдан дополнительный сигнал, который сигнализирует о готовности протеза ступни к использованию.
Помимо описанной активной выдачи сигналов можно также не предоставлять никаких источников энергии для этой выдачи сигналов, а вызывать эту выдачу сигналов путем самой регулировки. Для этого могут использоваться так называемые «дробинки», которые тактильно и акустически сопровождают регулировку стопы 2 относительно верхнего соединительного элемента 3. Дополнительно к растрированию можно также предусмотреть акустический элемент выводимых данных, который, например, подает акустический сигнал за счет проскакивающей пружины, когда уровень высоты каблука достигнут или превышен. Дополнительно может быть придано также оптическое отображение регулировки.
С помощью такого протеза ступни оказывается возможным предоставление настроечного устройства для протеза ступни, чтобы различные значения высоты каблука могли воспроизводимо подгоняться под всю конструкцию протеза, который был отрегулирован техником-ортопедом. Посредством управляющего устройства 12 можно предварительно выбрать определенное распределение по уровням высоты каблука, так что, например, после просмотра имеющихся в распоряжении ботинок с различными высотами каблука производится их систематизация техником-ортопедом. Если, например, в распоряжении имеется четыре различных уровня высоты каблука, то для каждой высоты каблука может быть запрограммировано оптимальное угловое положение стопы 2 относительно соединительного элемента 3. Такое программирование в управляющем устройстве 12 может выполняться вручную с помощью нажимных клавиш, с помощью поворотных выключателей или же с помощью беспроволочного соединения. За счет этого техник-ортопед может произвести фильтрацию множества возможных установок высоты каблука, выделив остающиеся установки, которые релевантны для данного пациента. Выдача сигналов для устанавливаемой высоты каблука происходит в этом случае с подгонкой под пациента, так что остается сделать выбор только из четырех отобранных значений высоты каблука, а не приходится выбирать из всех распределений по уровням высоты каблука, включая и такие, которые могут иметь очень мелкое дробление. Таким образом, сигнализация о релевантной установке высоты каблука происходит после предварительного выбора, сделанного техником-ортопедом, так что пациент не может быть введен в заблуждение не релевантными сигналами положения. Кроме того, имеется возможность, что выбранные техником-ортопедом положения будут снабжены другим сигналом, отличным от прочих фиксированных положений, например, в виде отклонения по звучанию, громкости звука, световой окраске или т.п.
Маркировка 11 высоты каблука может быть также введена посредством голосовой команды, так что определенный ботинок с соответствующей маркировкой присваивается протезу ступни, и посредством распознавания речи относящаяся к нему высота каблука снабжается соответствующим сигналом.
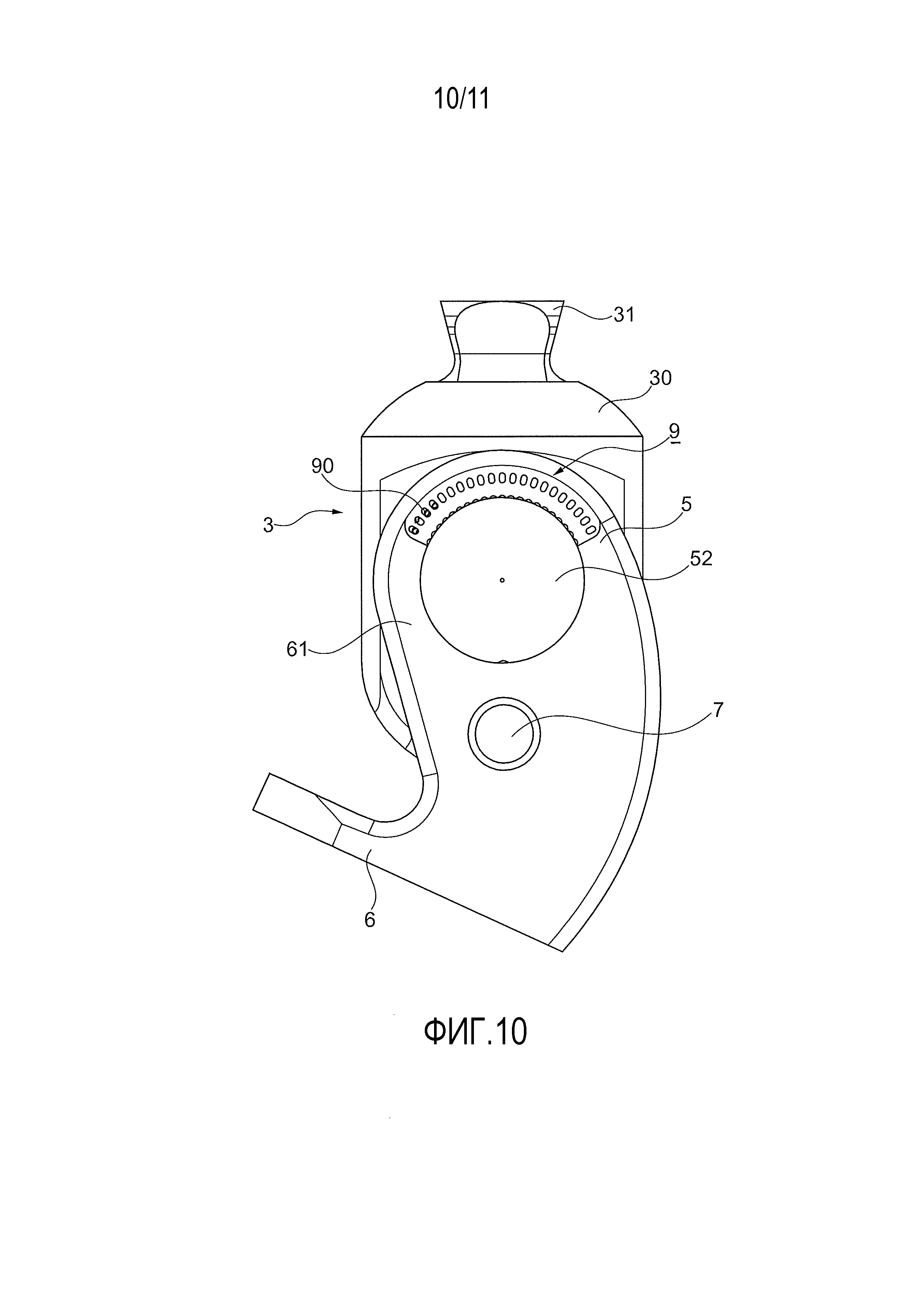
На Фиг. 10 на виде сбоку представлен один вариант осуществления данного изобретения, который в основных чертах соответствует показанному на Фиг. 6. Датчик 9 положения в представленном примере осуществления выполнен как механический датчик, в который интегрированы так называемые DIP-переключатели 90, которые проходят по дуге окружности вдоль пути поворота проксимального соединительного элемента 3 относительно хомута 6. За счет перемещения этих DIP-переключателей 90 фиксирующие устройства блокируются или освобождаются, контакты блокируются или освобождаются, или выполняется и то, и другое, так что достижение определенного положения основного тела 30 относительно хомута 6 или регулирующего устройства 5 указывается, ощущается или слышно, и/или может быть показано или выдано. В представленном примере осуществления в левых выемках показаны различные положения соответствующего DIP-переключателя 90.
На Фиг. 11 показано схематичное изображение принципа действия и конструкции механического датчика положения согласно Фиг. 10 в разрезе. Проксимальный соединительный элемент 3 с основным телом 30 и в этом случае установлен в опорах поворотно вокруг не представленной поворотной оси 7 на хомуте. DIP-переключатели 90 механического датчика 9 положения установлены веером на одинаковых расстояниях друг от друга, причем всего предусмотрено десять DIP-переключателей 90 в представленном примере осуществления. Оба внешних DIP-переключателя 90, а также средний DIP-переключатель 90 установлены в смещенном назад, ориентированном в направлении к поворотной оси 6 выключенном положении, тогда как остальные ориентированы в замкнутом положении. В выключенном положении фиксирующие выемки 92 освобождаются от этих DIP-переключателей 90, и в них может заскочить фиксирующий элемент 93 в форме шарика. Шарик 93 подпружинен в направлении к фиксирующим выемкам 92 посредством пружины 94, так что при регулировке соединительного элемента 3 шарик 93 заскакивает в соответствующую свободную фиксирующую выемку 92. За счет равномерного, веерообразного размещения DIP-переключателей 90 по всему пути поворота соединительного элемента 3 на равномерных угловых расстояниях возможно отображение в акустической и тактильной форме. Оба внешних DIP-переключателя 90 и относящиеся к ним фиксирующие выемки 92 представляют собой конечные пункты возможного поворота. В представленном варианте осуществления проксимальный соединительный элемент 3 позиционирован в среднем положении, из которого может происходить поворачивание после выполнения разблокировки в соответствующее направление поворота.
За счет заскакивания шарика 93 в фиксирующую выемку 92 можно также замкнуть электронный контакт, так что может быть выдан сигнал о достижении определенной угловой позиции на электронном пути, например, с помощью компьютера, мобильного телефона или специально для этого оснащенного устройства отображения. Благодаря этому контакту может быть также выдан акустический сигнал, который вызывается за счет механического шума, вызываемого заскакиванием шарика 93 в фиксирующую выемку 92 и отдельно производится, например, с помощью генератора сигнала в форме громкоговорителя или иного генератора звука, который активируется при замыкании контакта и активно генерирует сигнал, который отличается от шума, производимого заскакиванием.
При замкнутых DIP-переключателях 90 шарик 93 катится по поверхности DIP-переключателей, которые в замкнутом состоянии запирают фиксирующие выемки 92, так что не происходит никакого гаптического и/или акустического ответного сигнала для пользователя. Помимо такого размещения DIP-переключателей 90 на расстоянии друг возле друга можно также устанавливать их на неодинаковых расстояниях друг от друга, чтобы в предпочтительных положениях сделать возможной точную регулировку, так что могут заниматься также и промежуточные положения.
Наряду с показанным на Фиг. 10 расположением DIP-переключателей 90 только на верхней половине вокруг упорного кольца 51 можно также устанавливать DIP-переключатели дополнительно на противоположной, нижней стороне, причем эти DIP-переключатели на нижней стороне смещены там на половину деления, так что возможна половинная градация угловой регулировки. Благодаря этому может быть достижимой более тонкая регулировка при одновременно достаточном размере этих DIP-переключателей 90, так что обеспечивается значительное удобство в обращении с DIP-переключателями 90. Эти DIP-переключатели могут быть выполнены как ползунковые переключатели, которые установлены в направляющих с возможностью продольного перемещения. За счет выполнения элемента 93 геометрического замыкания в виде шарика с преодолением определенного сопротивления пружины 94 предоставляется возможность обкатывания по поверхности этих DIP-переключателей в замкнутом положении и выдвигания шариков 93 из выемок 92.
Реферат
Изобретение относится к протезу ступни, который содержит стопу, проксимальный соединительный элемент, поворотно соединенный со стопой, и регулирующее устройство, посредством которого обеспечивается перестановка стопы относительно соединительного элемента, причем регулирующее устройство снабжено по меньшей мере одним датчиком положения, связанным с элементом, вырабатывающим сигнал, который в зависимости от сигнала по меньшей мере одного датчика положения выдает сигнал о достижении положения стопы. Технический результат заключается в обеспечении точной ориентации и позиционирования протеза. 3 н. и 16 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Искусственная стопа
Искусственная стопа и способ управления ее движением
Комментарии