Искусственная стопа и способ управления ее движением - RU2419398C2
Код документа: RU2419398C2
Чертежи












Описание
Изобретение относится к искусственной стопе с продолжающейся от участка пятки до участка пальцев ноги продольной осью, длиной, шириной и высотой, соединением с элементом голени, верхней в направлении по высоте опорной структурой, продолжающейся от участка пятки до участка пальцев ступни эластичной структурой подошвы и расположенным между верхней опорной структурой и структурой подошвы эластичным соединительным элементом.
Кроме того, изобретение относится к способу управления движением искусственной стопы в зависимости от движения элемента голени пациента.
Получило известность такое крепление искусственной стопы к элементу голени пациента, при котором конструкция стопы обходится без сустава на участке естественного голеностопного сустава. При этом при ходьбе движение переката стопы достигают посредством соответствующих эластичных образований конструкции стопы.
Из патента US 5,993,488 известна конструкция стопы, состоящая из верхней соединительной пластины, пластины лодыжки, жестко соединенной с соединительной пластиной, и выполненной несколько выпуклой подошвенной пластины. При этом подошвенная пластина имеет длину почти равную искусственной стопе и сгибается в продольном направлении. Пластина лодыжки выполнена более короткой и расположена, по существу, параллельно подошвенной пластине. Между пластиной лодыжки и подошвенной пластиной находится элемент из пенистого материала из относительно твердого, но эластичного пенистого материала. Элемент из пенистого материала имеет площадь поперечного сечения горизонтального среза, примерно соответствующую площади поперечного сечения пластины лодыжки, так что элемент из пенистого материала заполняет промежуток между пластиной лодыжки и подошвенной пластиной по всему размеру пластины лодыжки. Соединенные друг с другом посредством склеивания элементы предохраняются от расслоения лентой, охватывающей подошвенную пластину и пластину лодыжки с находящимся между ними элементом из пенистого материала. Эта конструкция стопы делает возможным сжатие элемента из пенистого материала, таким образом, при перенесении тяжести тела сзади вперед соответствующим способом происходит смещение передачи усилия от пластины лодыжки на подошвенную пластину. Это может иметь смысл для процесса ходьбы, в частности для переката через стопу, однако при стоянии приводит, тем не менее, к чувству неуверенности, когда незначительные перенесения тяжести тела вызывают соответствующие переносы приложения силы между пластиной лодыжки и подошвенной пластиной. В данном случае у пациента возникает неуверенное "плавающее" ощущение, поскольку в конструкции стопы не существует никакой определенной точки для приложения сил тяжести в конструкцию стопы. Это относится также к боковым переносам тяжести тела и переносам тяжести тела в промежуточных направлениях по диагонали к продольной оси стопы.
Из патента US 4,446,580 известна конструкция стопы, в которой элемент голени в форме трубы соединен посредством смещенного относительно его продольной оси вращательного шарнира с базисной пластинкой протеза. Элемент голени ведется направляющим стержнем, относительно подвижно фиксированным на базисной пластинке протеза, причем поворотное движение элемента голени вокруг вращательного шарнира в базисной пластинке протеза амортизируется посредством пластичных амортизаторов. Базисная пластинка протеза жестко зафиксирована в выемке выполненной массивной искусственной стопы. Эластично пружинящая структура подошвы и соединенный с ней амортизатор при опоре на пятку не предусмотрены.
Задача данного изобретения - создать возможность для движения искусственной стопы, при котором, с одной стороны, осуществляется равномерный перекат, а с другой стороны, обеспечивается чувство уверенности также и при стоянии.
Для решения данной задачи предложена искусственная стопа названного типа, отличающаяся тем, что верхняя опорная структура соединена почти в середине стопы относительно ее длины со структурой подошвы посредством соединительной компоновки, допускающей относительное качающее движение между опорной структурой и структурой подошвы и поддерживающей при этом постоянное расстояние между опорной структурой и структурой подошвы в середине соединительной компоновки, по меньшей мере, при весовой нагрузке стоящего пациента.
Кроме того, способ решения данной задачи отличается тем, что движение элемента голени посредством опорной структуры в эластичную структуру подошвы в месте приложения силы на подвижном в нескольких осях среднем относительно длины стопы участке инициируется так, что, по меньшей мере, при стоянии пациента не происходит никакого изменения расстояния между опорной структурой и структурой подошвы в месте приложения силы, и что на участке пятки движение эластичной структуры подошвы в направлении к опорной структуре эластично амортизируется и ограничивается в направлении от опорной структуры.
Согласно изобретению передача усилий элемента голени на структуру подошвы происходит в определенном месте приложения силы, в котором опорная структура соединена подвижно в нескольких осях со структурой подошвы таким образом, что возможно эластично амортизируемое относительное качающее движение между опорной структурой и структурой подошвы, остается неизменным расстояние между опорной структурой и структурой подошвы в середине соединительной компоновки в месте приложения силы, по меньшей мере, при стоянии пациента, так что приложение силы остается без изменений в месте приложения силы, то есть в середине стопы.
Это имеет принципиальное значение также и для процесса переката при ходьбе. Движение переката контролируется в области пальцев стопы эластичной структурой подошвы. Для переката в процессе ходьбы пациента допускается уменьшение расстояния между опорной структурой и структурой подошвы в месте приложения силы при более значительных силах тяжести. При этом, во всяком случае, становится возможным за счет уменьшения расстояния из-за более значительных встречающихся при ходьбе сил компрессии незначительно переносить точку приложения силы назад, поскольку действующий между опорной структурой и структурой подошвы вектор силы смещается несколько назад при качающем движении опорной структуры вперед. Это способствует удобному процессу переката и вызывает при перекате ощущение большей надежности.
В предпочтительной форме выполнения предложенной искусственной стопы соединительная компоновка выполнена как шарнирная компоновка и образована, например, деталью из материала, сжимаемого качающими моментами на часть его поперечного сечения, но не сжимаемого по своей длине возникающей при стоянии силой. Соединительная компоновка является сжимаемой более значительными усилиями, возникающими в процессе ходьбы, для уменьшения расстояния в середине соединительной компоновки. Такое сжатие, приводящее к уменьшению длины цилиндра, допускается только при более значительных усилиях, возникающих в процессе ходьбы. Деталь из материала имеет, предпочтительно, форму цилиндра любого поперечного сечения, предпочтительно форму кругового цилиндра.
Эластичный соединительный элемент расположен в предложенной искусственной стопе только в области пятки, в частности не продолжается, как правило, по всей длине опорной структуры. Эластичный соединительный элемент может быть согнутой пластинчатой пружиной или другой пружинной компоновкой, тем не менее, предпочтительно, эластичной амортизационной прокладкой из синтетического пенистого материала.
Ограничительное устройство предпочтительно является гибкой и предпочтительно неэластичной лентой, натягиваемой при увеличении расстояния между верхней опорной структурой и структурой подошвы, в частности, при перекате искусственной стопы через участок пальцев стопы.
При этом гибкая лента проводится предпочтительно с поворотом через амортизационную прокладку, так что для натягивания ленты требуется эластичное вытеснение материала амортизационной прокладки. Таким образом, становится возможно управлять сопротивлением плюсны при перекате через плюсну посредством проведения гибкой ленты через амортизационную прокладку или вокруг амортизационной прокладки и приспосабливаться таким образом к потребностям пациента.
Верхняя опорная структура состоит предпочтительно из жесткого материала, однако, по меньшей мере, из материала, эластичность которого значительно ниже эластичности структуры подошвы.
Соединительная компоновка расположена на конце со стороны пальцев стопы верхней опорной структуры. В предпочтительной форме выполнения предложенной стопы шарнирная компоновка расположена в конце верхней опорной структуры со стороны пальцев ноги. Иначе говоря, вышеназванная опорная структура предпочтительно заканчивается в шарнирной компоновке.
В конструктивно предпочтительной форме выполнения верхняя опорная структура имеет нижнюю сторону, поднимающуюся с конца со стороны пальцев ноги относительно структуры подошвы, так что она имеет большее расстояние до структуры подошвы со стороны пятки, чем на участке соединительной компоновки.
Для простой установки предложенной искусственной стопы предпочтительно, если эластичная амортизационная прокладка имеет горизонтальную щель, в которую вдвинута структура подошвы. Образующая ограничительное устройство гибкая лента предпочтительно обхватывает нижнюю сторону структуры подошвы. В этом случае верхняя опорная структура может иметь предпочтительно обхватываемый лентой на его верхней стороне выступ.
Кроме того, предложенная искусственная стопа позволяет устойчиво стоять также при разной высоте каблука, носимого с искусственной стопой ботинка, если в предпочтительной форме выполнения предусмотрено наряду с эластичным соединительным элементом в соответствии с воздействием усилий блокируемое регулировочное устройство высоты, посредством которого регулируется расстояние между структурой подошвы и верхней опорной структурой. Посредством регулировочного устройства высоты может устанавливаться угол между верхней опорной структурой и структурой подошвы, что позволяет приспосабливаться к разной высоте каблука.
Далее приводится более подробное описание изобретения со ссылкой на представленные на чертежах примеры выполнения изобретения. На чертежах показаны:
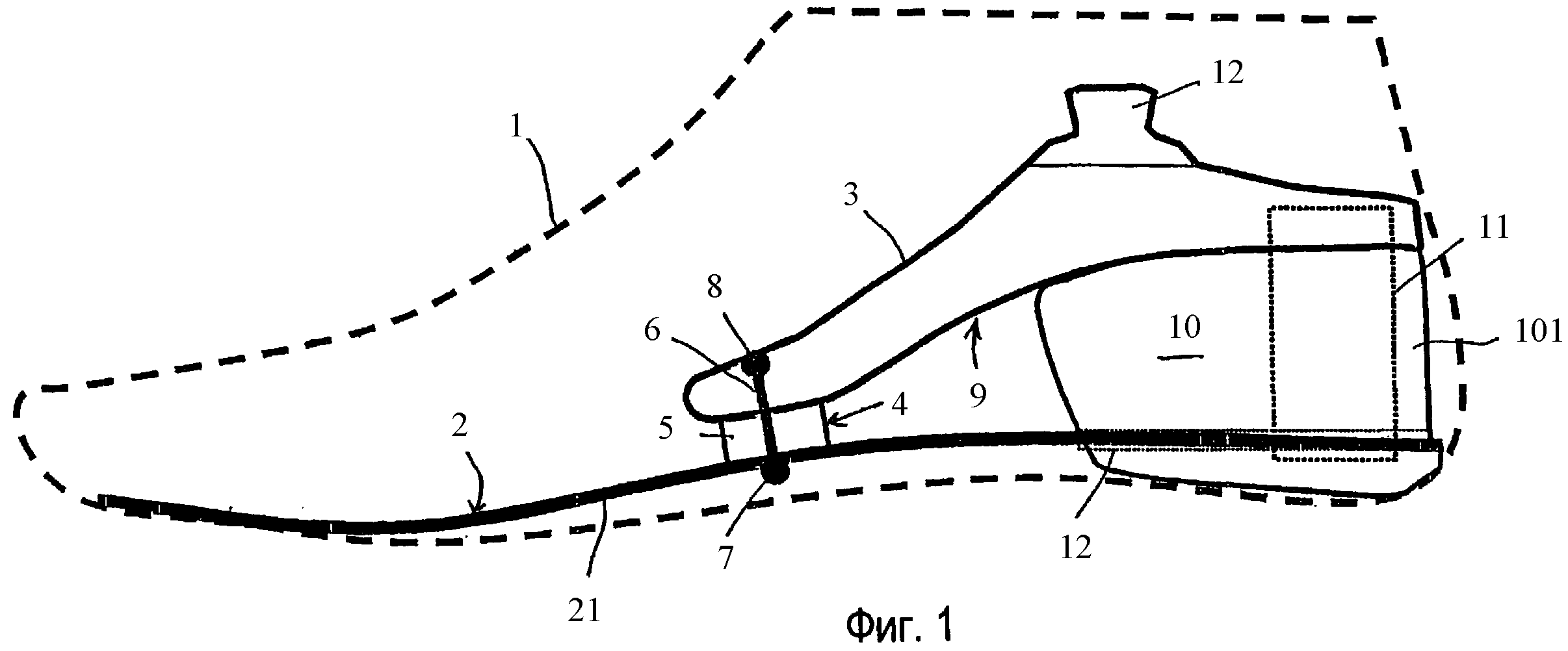
Фиг.1. Конструкция предложенной искусственной стопы, первая форма выполнения, схематичное изображение;
Фиг.2. Пример выполнения размещения служащей в качестве ограничительного устройства гибкой, однако неэластичной ленты;
Фиг.3. Видоизмененное расположение ленты для управления сопротивлением плюсны при перекате;
Фиг.4. Предложенная искусственная стопа, вторая форма выполнения согласно фиг.1, схематичное изображение;
Фиг.5-7. Три фазы монтажа искусственной стопы согласно фиг.1,
Фиг.8. Предложенная искусственная стопа, третья форма выполнения, схематичное изображение;
Фиг.9. Предложенная искусственная стопа, четвертая форма выполнения, схематичное изображение;
Фиг.10. Предложенная искусственная стопа, пятая форма выполнения, схематичное изображение и
Фиг.11. Предложенная искусственная стопа, шестая форма выполнения, схематичное изображение;
Фиг.12. Предложенная искусственная стопа, снабженная устройством регулировки высоты, седьмая форма выполнения, два схематичных изображения.
На фиг.1 показаны пунктиром контуры косметической оболочки 1 искусственной стопы. По существу, по всей длине стопы продолжается структура 2 подошвы, имеющая при рассмотрении снизу в области пальцев ступни выпуклый свод, переходящий примерно в середине стопы в вогнутый свод и продолжающийся до участка пятки. Структура 2 подошвы состоит в представленном примере выполнения из плоской, выполненной в форме полосы, вытянутой пружины 21 подошвы. Примерно в середине стопы структура 2 подошвы соединена с передним концом опорной структуры 3 посредством образованной шарнирной компоновкой 4 соединительной компоновки. Шарнирная компоновка 4 состоит из детали 5 материала в форме цилиндра из полимерного материала, опирающегося нижней торцевой поверхностью на структуру 2 подошвы, а верхней торцевой поверхностью - на нижнюю сторону опорной структуры 3. В представленной форме выполнения шарнирная компоновка 4 дополнена штифтовой компоновкой 6, имеющей на ее обоих концах шаровые шарниры 7, 8. Шаровые шарниры 7, 8 опираются, с одной стороны, на структуру 2 подошвы, а с другой стороны - на опорную структуру 3 и повышают устойчивость соединения опорной структуры 3 с цилиндром 5 и структурой 2 подошвы, не препятствуя относительному качанию опорной структуры 3 относительно структуры 2 подошвы. Относительное качание возникает в результате эластичного выполнения цилиндра 5 таким образом, что цилиндр 5 из-за перекосов опорной структуры 3 выдавливается относительно структуры 2 подошвы на части его поперечного сечения силами тяжести пациента, причем растягивается находящаяся диаметрально противоположно часть цилиндра 5, так что средняя высота цилиндра 5, в частности суммарное среднее расстояние между опорной структурой 3 и структурой 2 подошвы на участке шарнирной компоновки 4 остается постоянным.
Выполнение цилиндра 5 позволяет уменьшить среднее расстояние только при воздействии больших усилий, возникающих в шарнирной компоновке 4 при перекате стопы во время процесса ходьбы.
Опорная структура 3 имеет нижнюю сторону 9, выполненную поднимающейся от шарнирной компоновки 4 к участку пятки относительно структуры 2 подошвы, так что расстояние между опорной структурой 3 и структурой 2 подошвы увеличивается, начиная от шарнирной компоновки 4 до участка пятки. На участке пятки между опорной структурой 3 и структурой 4 подошвы расположен эластичный соединительный элемент 10 в виде эластичной амортизационной прокладки 101. Эластичный соединительный элемент (10) снабжен ограничительным устройством (11), ограничивающим расстояние между опорной структурой (3) и структурой (2) подошвы, например в эластичную амортизационную прокладку 101 введено ограничительное устройство в форме гибкой ленты 11, определяющей максимальное расстояние между опорной структурой 3 и структурой 2 подошвы на участке ленты 11, как это более детально поясняется на фиг.2 и фиг.3.
Опорная структура имеет на своей верхней стороне подгоночную цапфу 12, посредством которой крепится соединение протеза голени с соответствующим элементом голени.
На фиг.2 показано, что гибкая, но неэластичная лента введена внутрь эластичной амортизационной прокладки 10 и охватывает нижнюю сторону структуры 2 подошвы. Для приема структуры 2 подошвы эластичная амортизационная прокладка 10 снабжена сквозной горизонтальной щелью 12, обозначенной на фиг.1 пунктиром. Выполненная бесконечной лента 11 обхватывает цилиндрический выступ 13 на нижней стороне опорной структуры 2.
На фиг.2 показано натянутое состояние ленты 11 в состоянии максимального расстояния между опорной структурой 3 и структурой 2 подошвы. Видно, что при опоре на пятку эластичная амортизационная прокладка 10 сжимается, вследствие чего гибкая лента 11 из натянутого состояния переходит в образующее складки, имеющее слабину состояние. При последующем расширении эластичной амортизационной прокладки 10 или при нагрузке на участок плюсны структуры 2 подошвы гибкая лента 11 снова переводится в показанное на фиг.2 натянутое положение.
Кроме того, на фиг.2 показано, что нижняя сторона 9 опорной структуры 3 выполнена в области пятки крышеобразно и что эластичная амортизационная прокладка 10 прилегает соответствующей крышеобразной верхней стороной к крышеобразной нижней стороне 9 опорной структуры 3 и может, например, приклеиваться там.
В показанном на фиг.3 примере выполнения лента 11 проходит между структурой 2 подошвы и выступом 13 внутри эластичной амортизационной прокладки по изогнутой линии. Для выполнения ограничительной функции максимального расстояния между опорной структурой 3 и структурой 2 подошвы лента 11 натянута так, что образует прямую линию между выступом 13 и боковым кантом структуры 2 подошвы. Для этого лента 11 должна сжимать по бокам участки эластичной амортизационной прокладки 10, так чтобы возникало гибкое демпфирование увеличения расстояния между структурой 2 подошвы и опорной структурой 3 при нагрузке плюсны структуры 2 подошвы. Таким образом, движение переката через плюсну структуры 2 подошвы становится возможным с повышенным сопротивлением, так что расположение гибкой ленты 11 позволяет управлять сопротивлением плюсны искусственной стопы.
Представленная на фиг.4 форма выполнения отличается от показанной на фиг.1 формы выполнения только тем, что опорная структура 3 переходит в элемент 14 голени как одно целое, так что не требуется никакого соединения между элементом 14 голени и опорной структурой 3.
Установка предложенной искусственной стопы происходит при соединении опорной структуры 3 со структурой 2 подошвы посредством шарнирной компоновки 4, вследствие чего образуется открывающийся назад участок пятки. Эластичная амортизационная прокладка 10 вводится в открывающийся конусом промежуток между опорной структурой 3 и структурой 2 подошвы, в то время как структура 2 подошвы задвигается своим задним концом в служащую для приема щель 12, как это показано на фиг.6 в промежуточном положении. При дальнейшем задвигании эластичной амортизационной прокладки 10 гибкая лента 11, выходящая петлей из верхней стороны эластичной амортизационной прокладки 10, сдвигается посредством не показанного на фиг.5-7 выступа 13. После окончательного вдвигания эластичной амортизационной прокладки 10 при установке ограничительного устройства в форме замкнутой обегающей гибкой, но неэластичной ленты 11, эластичная амортизационная прокладка 10 может быть соединена с опорной структурой 3, а при необходимости - со структурой 2 подошвы посредством отвердевшего клея.
Крышеобразное выполнение нижней стороны 9 опорной структуры 3 и соответствующее крышеобразное выполнение верхней стороны эластичной амортизационной прокладки 10 вызывает автоматическое центрирование эластичной амортизационной прокладки 10 в сочетании с вызываемым ее направлением при задвигании структуры 2 подошвы в приемную щель 12.
На фиг.7, так же, как и на фиг.1 и фиг.4 показано, что находящаяся под структурой 2 подошвы часть эластичной амортизационной прокладки 10 может служить в качестве амортизатора для структуры 2 подошвы при опоре на пятку. Возможное придание формы эластичной амортизационной прокладке 10 на этой нижней стороне благоприятствует процессу переката при опоре на пятку.
Представленная в примерах выполнения образованная цилиндром 5 шарнирная компоновка может выполняться также по-другому, например в форме шарового сегмента, взаимодействующего с соответствующим шаровым гнездом для обеспечения, таким образом, качающегося соединения между опорной структурой 3 и структурой 2 подошвы, при этом не изменяя расстояния между опорной структурой 3 и структурой 2 подошвы в месте приложения усилия стоящего пациента, в частности на участке шарнирной компоновки 4. Учитывая воздействие больших усилий в процессе ходьбы, шаровой сегмент может быть образован, например, из несколько вдавливаемого этими силами полимерного материала или эбонита.
В представленной на фиг.8 третьей форме выполнения предложенной искусственной стопы эластичный соединительный элемент 10 между опорной структурой 3 и структурой 2 подошвы имеет форму пружины 102 управления. Пружина управления выполнена в виде двуплечевого элемента пружины и образует вместе с промежуточным элементом 15 элемент шарнирной компоновки 4. Для этого верхняя сторона промежуточного элемента имеет вогнутый свод, к которому прилегает соответствующий выпуклый свод конца опорной структуры 3 со стороны пальцев ступни. Нижняя сторона промежуточного элемента 15 также вогнута к нижней стороне и прилегает к соответствующему выпуклому своду амортизатора 16 из полимерного материала. Шарнирная компоновка 4 удерживается штифтовой компоновкой 6.
Эластичный соединительный элемент (10) имеет пружину (102) управления с направленным в сторону пятки плечом (17). Пружина -102 управления соединена с направленным к пятке плечом 17 на конце опорной структуры 3 со стороны пятки посредством установочного винта 18. Направленное в сторону пальцев стопы плечо (19) пружины (102) управления образует элемент структуры (2) подошвы, в котором направленное в сторону пальцев стопы плечо (19) соединено с передним концом пружины (21) подошвы структуры (2) подошвы. Направленное к пальцам ступни плечо 19 пружины 102 управления проходит почти параллельно до конца со стороны пальцев ступни пружины 21 подошвы. На этом участке плечо 19, направленное к пальцам ступни пружины 102 управления, и пружина 21 подошвы соединены посредством эластичного амортизатора 20 и двух расположенных с обоих сторон амортизатора 20 гибких, но неэластичных стягивающих лент 22, 23.
При опоре на пятку во время процесса ходьбы направленное к пятке плечо 17 пружины 102 управления эластично деформируется вниз, то есть по направлению к концу со стороны пятки пружины 21 подошвы. Наряду с деформацией, смягчающей опору на пятку, направленного к пятке плеча 17 возникает направленный вверх крутящий момент на направленном к пальцам стопы плече 19 пружины 102 управления. В то время как стопа выполняет подошвенный изгиб относительно элемента 14 голени, участок пальцев стопы приподнимается направленным к пальцам ступни плечом 19 пружины 102 управления, вследствие чего облегчается перекат стопы.
С обеих сторон в продольном направлении от эластичного амортизатора (20) расположены гибкие стягивающие ленты (22, 23), ограничивающие расстояние между пружиной (21) подошвы и направленным к пальцам стопы плечом (19). Гибкая стягивающая -лента 23, расположенная между промежуточным элементом 15 и эластичным амортизатором 20, передвигается так же, как и эластичный амортизатор 20 в продольном направлении, как это показано стрелками на фиг.8. Перемещение гибкой стягивающей ленты 23 от показанной на чертеже середины между промежуточным элементом 15 и концом со стороны пальцев ступни структуры 2 подошвы приводит к снижению результирующей твердости направленного к пятке плеча 17 пружины 102 управления. Опора на пятку амортизируется более мягко. Независимо от этого положение эластичного амортизатора 20 действует как установочное средство твердости плюсны структуры 2 подошвы. При приближении эластичного амортизатора к носку плюсны она становится более жесткой.
Пружина 21 подошвы и пружина 102 управления согласованы так, что при опоре на пятку возникает желаемый подошвенный изгиб.
В показанном на фиг.9 четвертом примере выполнения эластичный соединительный элемент 10 опять же образован, по существу, эластичной амортизационной прокладкой 101 на участке пятки. Гибкая лента 11, ограничивающая максимальное расстояние между задним концом опорной структуры 3 и концом со стороны пятки структуры 2 подошвы, размещена в открывающейся назад щели 24 опорной структуры 3. Имеющаяся в данном случае пружина 102 управления выступает своим направленным к пятке плечом 17 в эластичную амортизационную прокладку 101. В этом случае пружина 102 управления образует, по существу, элемент структуры 2 подошвы. Жесткость плюсны регулируется размером и позиционированием эластичного амортизатора 20.
В представленной на фиг.10 пятой форме выполнения пружина 102 управления опять же соединена своим концом со стороны пятки посредством установочного винта 18 с концом со стороны пятки опорной структуры 3. Дополнительно между опорной структурой 3 или направленным к пятке плечом 17 пружины 102 управления расположена эластичная амортизационная прокладка 101 для амортизации опоры на пятку. Движение, увеличивающее расстояние между опорной структурой 3 и структурой 2 подошвы, ограничивается на участке пятки гибкой лентой 11.
Вращательный шарнир 4 образован в данном случае, также, как и в представленном на фиг.1 примере выполнения, штифтовой компоновкой 6 и в данном случае двумя цилиндрами 5' из полимерного материала, расположенными, с одной стороны, между опорной структурой 3 и пружиной 102 управления и между пружиной 102 управления и пружиной 21 подошвы, с другой стороны.
В этой форме выполнения передние концы пружины 102 управления и пружины 21 подошвы соединены друг с другом эластичным амортизатором 25 и гибкой, но неэластичной стягивающей лентой 26. Также и в данном случае пружина 102 управления и пружина 21 подошвы таким образом согласованы друг с другом, что при опоре на пятку возникает подошвенный изгиб. Жесткость пятки может регулироваться заменой эластичной амортизационной прокладки 101.
На фиг.11 показан измененный пример выполнения по сравнению с фиг.10, в котором предусмотрены улучшенные возможности регулировки. Также как и в показанном на фиг.8 примере выполнения, при смещении гибкой стягивающей ленты 23 к концу со стороны пятки структуры 2 подошвы можно мягче регулировать амортизацию, вызываемую направленным в сторону пятки плечом 17 пружины 102 управления. Смещение эластичного амортизатора 20 в продольном направлении вызывает изменение твердости плюсны, причем наибольшая твердость плюсны регулируется при смещении эластичного амортизатора к самому концу пальцев стопы. Смещение пластичной амортизационной прокладки 101 и соответствующей гибкой ленты 11 в продольном направлении, с одной стороны, способствует дополнительной амортизации опоры на пятку, а с другой стороны, влияет на твердость плюсны, поскольку действующее направленное к пятке плечо 17 двухплечевой пружины 102 управления изменяется по своей длине.
На фиг.12а и фиг.12b схематично представлена седьмая форма выполнения предложенной искусственной стопы. На чертежах схематично показаны структура 2 подошвы, вращательный шарнир 4, верхняя опорная структура 3 и элемент 14 голени. Элемент 14 голени жестко соединен с верхней опорной структурой 3. На участке пятки предусмотрен эластичный соединительный элемент 10, в частности, в форме амортизатора пятки. Он соединен с верхней опорной структурой 3 или элементом 14 голени не непосредственно, а посредством штока 28, расположенного с возможностью смещения относительно элемента 14 голени и фиксирующегося посредством схематически представленного элемента 29 фиксации.
На фиг.12а показана седьмая форма выполнения в так называемом "положении босиком", в частности, без дополнительной высоты каблука обуви. В противоположность этому, на фиг.12b показана структура 2 подошвы с уменьшенным расстоянием до элемента 14 голени или до верхней опорной структуры 3, поэтому структура 2 подошвы изменена по своему положению угла относительно элемента 14 голени и верхней опорной структуры 3 настолько, чтобы обеспечивать адаптацию к высоте каблука обуви. Сразу видно, что за счет разного перемещения штока 28 относительно элемента 14 голени или верхней опорной структуры 3 возможна адаптация к различной высоте каблука.
Предложенная конструкция делает возможным удобное движение переката с соответствующими естественной стопе амортизированными качающимися движениями, не вызывая у пациента неуверенность вследствие изменения точки приложения силы при стоянии. В предложенных конструкциях вследствие неизменяемого среднего расстояния между опорной структурой 3 и структурой 2 подошвы на участке шарнирной компоновки 4 точка приложения силы остается без изменения, во всяком случае, если пациент стоит. При ходьбе может происходить предпочтительное для процесса переката незначительное смещение назад точки приложения силы.
Реферат
Изобретение относится к медицинской технике, а именно к протезам, в частности к искусственной стопе. Искусственная стопа с продолжающейся от участка пятки до участка пальцев стопы продольной осью, длиной, шириной и высотой, с соединением с элементом голени, верхней в направлении по высоте опорной структурой, продолжающейся от участка пятки до участка пальцев стопы эластичной структурой подошвы и расположенным между верхней опорной структурой и структурой подошвы эластичным соединительным элементом. Верхняя опорная структура в середине стопы по отношению к ее длине подвижно в нескольких осях соединена со структурой подошвы посредством соединительной компоновки, допускающей относительное качающееся движение между опорной структурой и структурой подошвы. Соединительная компоновка поддерживает постоянное расстояние между опорной структурой и структурой подошвы в середине соединительной компоновки, по меньшей мере, при весовой нагрузке стоящего пациента. Передача усилий элемента голени на структуру подошвы вследствие этого происходит в определенном, остающимся без изменений месте приложения силы в середине стопы. Изобретение обеспечивает движение искусственной стопы, при котором, с одной стороны, осуществляется равномерный перекат, а с другой стороны, обеспечивается чувство уверенности также и при стоянии. 2 н. и 22 з.п. ф-лы, 13 ил.
Комментарии