Параллелограммный прямолинейно-направляющий механизм - RU2769002C1
Код документа: RU2769002C1
Чертежи


Описание
Изобретение относится к области машиностроения, а именно к параллелограммным шарнирным механизмам с вращательными кинематическими парами и может найти применение в манипуляторах, роботах, обрабатывающих центрах и грузоподъемных механизмах с шарнирным подвесом переносимого груза.
Известен параллелограммный шарнирный механизм, содержащий шарнирно-сочлененные между собой рычажные звенья, образующие замкнутую кинематическую цепь, включающую двухшарнирную стойку с установленными на ней двумя кривошипами, шарнирно соединенные между собой через двухшарнирный шатун (книга Крайнев А.Ф. «Словарь-справочник по механизмам»: М.: Машиностроение, 1987, с. 88, схема «б») - аналог.
Недостатками известного параллелограммного шарнирного механизма является наличие мертвых неуправляемых положений кривошипов при их расположении вдоль двухшарнирной стойки, а также ограниченные эксплуатационные возможности воспроизведения прямолинейного поступательного движения выходного звена.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является параллелограммный механизм, содержащий шарнирно-сочлененные между собой звенья, образующие замкнутую кинематическую цепь из двухшарнирной стойки, двух кривошипов, соединяющего их линейного шатуна, а также набора зубчатых секторов, ударяемых между собой два раза за цикл при прохождении мертвых положений параллелограмма (авт. свид. №877176, Бюл. №40, СССР, 1981 год) - прототип.
Недостатками указанного параллелограммного механизма являются сложная конструкция и трудоемкость изготовления дополнительного комплекта зубчатых секторов, а также большие динамические нагрузки и низкий срок службы из-за жестких ударов зубчатых секторов между собой в мертвых положениях параллелограмма, в сочетании с ограниченными эксплуатационными возможностями воспроизведения только криволинейного закона движения выходного звена.
Получение технического результата достигается за счет того, что замкнутая кинематическая цепь предлагаемого параллелограммного механизма составлена из трехкривошипного шарнирного параллелограмма с четырехшарнирной треугольной стойкой, который через вращательные кинематические пары с параллельными осями углового поворота соединен с четырехзвенной структурной группой, состоящей из трех двухшарнирных звеньев одинаковой длины и дополнительного двухшарнирного соединительного рычага, которые соединены между собой посредством двойных цилиндрических шарниров.
Сущность изобретения поясняется чертежами на фиг1., фиг.2 и фиг.3.
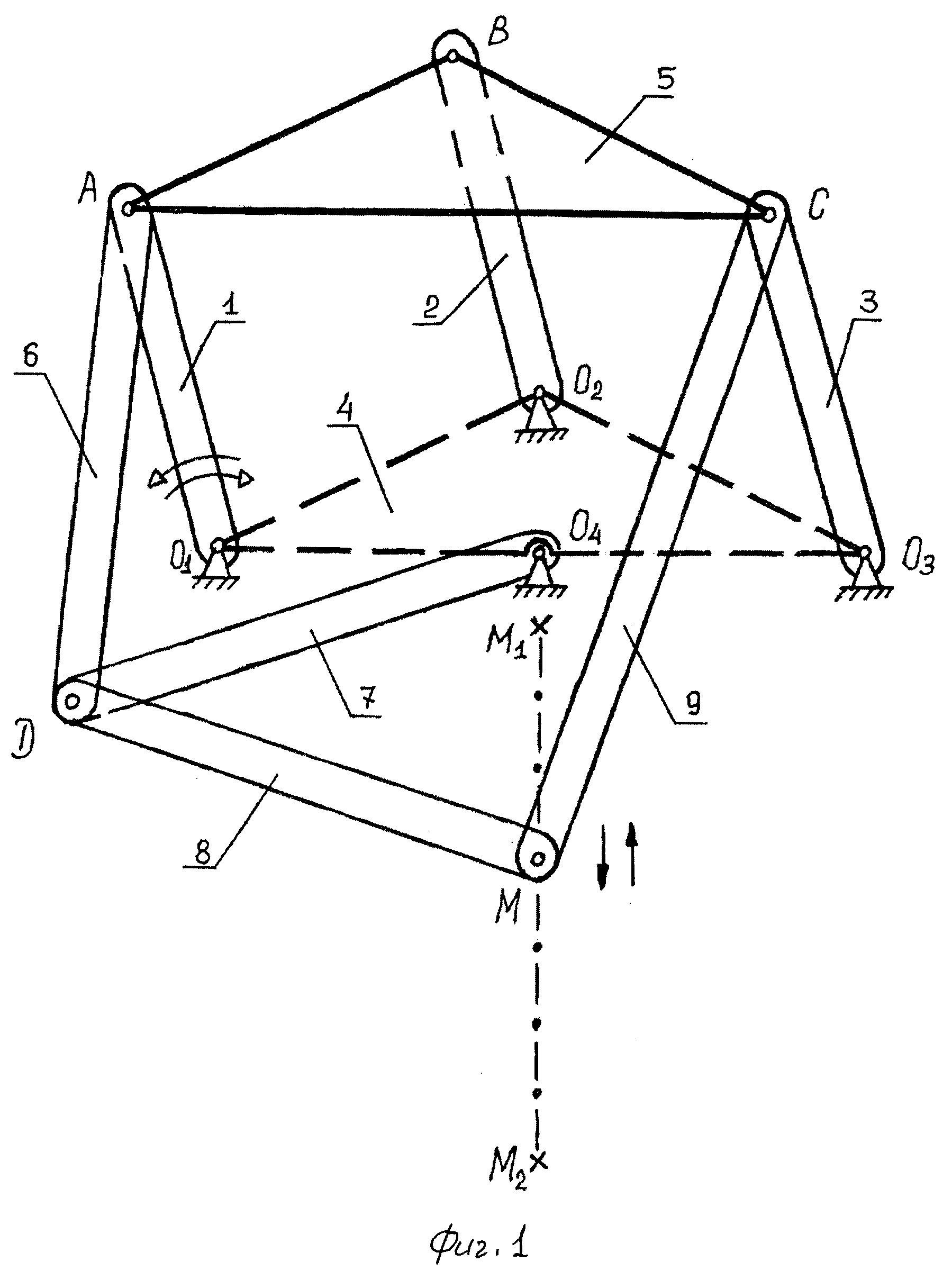
На фиг.1 изображен общий вид предлагаемого параллелограммного прямолинейно-направляющего механизма, в котором замкнутая кинематическая цепь образована трехкривошипным шарнирным параллелограммом, содержащим параллельные между собой и установленные при сборке цепи в одном направлении кривошипы 1, 2, 3 одинаковой длины О1А=O2B=O3C и четырехшарнирную треугольную стойку;, в которой три шарнира О1,О2 и O3 расположены на вершинах треугольника O1O2O3, а четвертый шарнир O4 расположен посредине основания O1O3 этого треугольника, где O1O4 = O4O3.
Шатун 5 трехкривошипного шарнирного параллелограмма выполнен в виде треугольника ABC, выполненного равным треугольнику O1O2O3 стойки 4 этого параллелограмма, который посредством вращательных кинематических пар А, С и O4 с параллельно расположенными осями их углового поворота соединен с четырехзвенной структурной группой, состоящей из трех двухшарнирных звеньев 6, 7 и 8 одинаковой длины DA = DO4 = DM, одним концом соединенных между собой через двойной шарнир D, а другим концами присоединенных к стойке 4 (в точке O4) и к шатуну 5 (в точках А и С) через два двойных шарнира А и С посредством дополнительного двухшарнирного соединительного рычага 9, длина которого превышает длину каждого из трех двухшарнирных звеньев 6, 7 и 8 упомянутой структурной группы, где МС > (DA = DO4 = DM).
На фиг.2 представлен вариант выполнения предлагаемого параллелограммного прямолинейно-направляющего механизма, в котором шарнир М, расположенный на выходе параллелограмма и соединяющий двухшарнирное звено 8 с дополнительным двухшарнирным соединительным рычагом 9, выполнен с возможностью подвижной угловой установки на нем поворотного шарнирного подвеса 10 с переносимым грузом 11 для образования точного прямолинейно-направляющего механизма для подъема и опускания груза 11 точно по вертикальной прямой М1М2 без вредного углового раскачивания этого груза.
Трехшарнирное звено шатуна 5 выполнено с возможностью закрепления на нем рабочего органа для образования платформенного шарнирного манипулятора с криволинейным поступательным движением шатуна в качестве подвижной платформы на выходе манипулятора с установленным на ней и перемещаемым вместе с шатуном 5 рабочим органом 12 при сохранении его заданной постоянной, например, угловой ориентации.
На фиг.3 представлен вариант выполнения предлагаемого параллелограммного прямолинейно-направляющего механизма, в котором он снабжен шарнирным ромбом LMEN, стороны LM и ЕМ которого соответственно сблокирован с двухшарнирным звеном 8 и дополнительным двухшарнирным соединительным рычагом 9, а цилиндрический шарнир N на выходе шарнирного ромба LMEN выполнен с возможностью закрепления на нем поворотного шарнирного подвеса 10 с переносимым грузом 11 для его перемещения по вертикали и горизонтали. Шатун 5 сблокирован с рабочим органом в виде грузоподъемной площадки 13, сохраняющей постоянную горизонтальную ориентацию при ее круговом перемещении.
Работа представленного параллелограммного прямолинейно-направляющего механизма заключается в следующем:
1) Заданное вращательное движение одного из параллельных кривошипов 1, 2 или 3 (например, кривошипа 1) посредством четырехзвенной структурной группы, состоящей из трех двухшарнирных звеньев 6. 7 и 8 и дополнительно двухшарнирного рычага 9. преобразуется в поступательное движение шарнира М этой структурной группы точно по прямой линии М1 - М2. Это поступательное движение шарнира М обеспечивает:
а) в грузоподъемном механизме манипулятора (фиг.2) при подвижном закреплении на шарнире М шарнирного подвеса 10с переносимым грузом 11 - перемещение этого груза 11 точно по вертикали М1 - М2 при подъеме или опускании без его вредного раскачивания.
б) в обрабатывающем технологическом центре при закреплении на шарнире М режущего инструмента обеспечивается точное нарезании, например, прямолинейных шпоночных пазов на детали.
2) При выполнении в трехкривошипном параллелограммом механизме-стойки 4 в виде четырехшарнирного звена, а шатуна 5 в виде трехшарнирного звена - полностью исключается расположение на одной прямой линии всех шарниров кривошипов 1, 2 и 3 стойки 4 и шатуна 5, которое приводит (например, в параллелограмме по авт. свид. №877176) к мертвым неуправляемым положениям (для ударного перехода через которые надо применять в авт. свид. №877176 сложные комплекты зубчатых секторов).
Достигаемый в предлагаемом параллелограммном механизме положительный эффект заключается в упрощении конструкции, обеспечении точного поступательного движения рабочего органа без применения ненадежных поступательных кинематических пар, а также исключения мертвых неуправляемых положений без применения дополнительных сложных переходных устройств (создающих жесткие удары зубчатых секторов, как в авт. свид. №877176, Бюл. №40, СССР, 1981 год).
Реферат
Изобретение относится к области машиностроения. Параллелограммный прямолинейно-направляющий механизм содержит трехкривошипный шарнирный параллелограмм и четырехзвенную структурную группу, кинематически связанные между собой через вращательные кинематические пары с параллельными осями углового поворота. Все три кривошипа выполнены в виде двухшарнирных звеньев одинаковой длины и установлены в одном между собой направлении. Стойка выполнена в виде четырехшарнирного треугольного звена, три шарнира которого расположены на вершинах упомянутого треугольника, а четвертый шарнир расположен посередине основания этого треугольника. Шатун выполнен в виде треугольника трехшарнирного звена, который равен треугольнику стойки, а четырехзвенная структурная группа составлена из трех двухшарнирных звеньев одинаковой длины, одним концом соединенных между собой через двойной шарнир, а другим концом соответственно присоединенных к стойке и к шатуну через два двойных шарнира и дополнительный двухшарнирный соединительный рычаг, длина которого превышает длину каждого из трех двухшарнирных звеньев упомянутой структурной группы. Обеспечивается упрощение конструкции, а также исключение мертвых неуправляемых положений механизма. 3 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Шарнирный кривошипный механизм
Комментарии