Устройство помощи при вождении и способ помощи при вождении - RU2682805C1
Код документа: RU2682805C1
Чертежи





Описание
Область техники
Изобретение относится к области техники устройства помощи при вождении и способа помощи при вождении, которые выполняют помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции.
Уровень техники
Пример устройства помощи при вождении описывается в публикации заявки на патент Японии № 2005-063398 (JP 2005-063398 А). В частности, устройство помощи при вождении, описанное в JP 2005-063398 А, выполняет помощь при замедлении для извлечения дорожного знака, требующего остановки, и стоп-линии из изображения, которое фотографируется посредством камеры, и которое показывает вид впереди транспортного средства, вычисления позиции остановки (т.е. целевой позиции) на основе одного из извлеченного дорожного знака и стоп-линии и вмешательства в вождение транспортного средства таким образом, чтобы останавливать транспортное средство в вычисленной целевой позиции.
Помимо этого, имеется публикация заявки на патент Японии № 2013-196639 (JP 2013-196639 А), в качестве документа в предшествующем уровне техники, релевантном для изобретения.
Сущность изобретения
Существует вероятность того, что водитель нажимает педаль тормоза в то время, когда выполняется помощь при замедлении, то есть в то время, когда устройство помощи при вождении вмешивается в вождение транспортного средства. Тем не менее, в устройстве помощи при вождении, описанном в JP 2005-063398 А, взаимодействие помощи при замедлении и операции нажатия педали тормоза не рассматривается. Следовательно, устройство помощи при вождении, описанное в JP 2005-063398 А, имеет запас для улучшения в том, что необходимо выполнять взаимодействие с помощью при замедлении посредством устройства помощи при вождении и операцией нажатия педали тормоза водителем.
Изобретение предоставляет устройство помощи при вождении и способ помощи при вождении, которые позволяют выполнять помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции, при взаимодействии с операцией нажатия педали тормоза водителем.
Первый аспект изобретения заключается в устройстве помощи при вождении, которое включает в себя электронный модуль управления. Электронный модуль управления выполнен с возможностью выполнять помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции. Электронный модуль управления выполнен с возможностью распознавать ситуацию впереди транспортного средства. Электронный модуль управления выполнен с возможностью определять то, может или нет целевая позиция определяться из предварительно определенного объекта, когда электронный модуль управления распознает то, что предварительно определенный объект присутствует впереди транспортного средства. Предварительно определенный объект указывает то, что транспортное средство должно замедляться. Электронный модуль управления выполнен с возможностью выполнять первую помощь в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция не может определяться. Первая помощь представляет собой помощь, за счет которой транспортное средство замедляется с первым замедлением. Первое замедление изменяется на основе операции нажатия педали тормоза водителем. Электронный модуль управления выполнен с возможностью выполнять вторую помощь в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция может определяться. Вторая помощь представляет собой помощь, за счет которой транспортное средство замедляется со вторым замедлением. Второе замедление равно или выше предварительно определенного замедления, необходимого для того, чтобы замедлять транспортное средство до целевой скорости до того, как транспортное средство достигает целевой позиции, определенной из предварительно определенного объекта.
Когда целевая позиция не может определяться, имеется относительно более высокая вероятность того, что позиция, в которой замедление транспортного средства завершается, отклоняется от надлежащей целевой позиции вследствие активного вмешательства в вождение транспортного средства посредством помощи при замедлении, по сравнению с тем, когда целевая позиция может определяться. Следовательно, когда целевая позиция не может определяться, устройство помощи при вождении выполняет, в качестве помощи при замедлении, первую помощь, за счет которой транспортное средство замедляется с первым замедлением в зависимости от операции нажатия педали тормоза водителем. Таким образом, операция нажатия педали тормоза водителем имеет приоритет относительно активного вмешательства в вождение транспортного средства посредством помощи при замедлении, и типично, вмешательство в вождение транспортного средства посредством помощи при замедлении не выполняется или подавляется до допустимого минимума. С другой стороны, когда целевая позиция может определяться, имеется относительно более низкая вероятность того, что позиция, в которой замедление транспортного средства завершается, отклоняется от надлежащей целевой позиции вследствие активного вмешательства в вождение транспортного средства посредством помощи при замедлении. Следовательно, когда целевая позиция может определяться, устройство помощи при вождении выполняет, в качестве помощи при замедлении, вторую помощь, за счет которой транспортное средство замедляется со вторым замедлением, позволяющим транспортному средству безусловно замедляться до целевой скорости до того, как транспортное средство достигает целевой позиции. Таким образом, активное вмешательство в вождение транспортного средства посредством помощи при замедлении имеет приоритет относительно операции нажатия педали тормоза водителем. Таким образом, в зависимости от того, определяется или нет целевая позиция, устройство помощи при вождении выполняет переключение между первой помощью, в которой операция нажатия педали тормоза имеет приоритет относительно активного вмешательства в вождение транспортного средства посредством помощи при замедлении, и второй помощью, в которой активное вмешательство в вождение транспортного средства посредством помощи при замедлении имеет приоритет относительно операции нажатия педали тормоза. Следовательно, устройство помощи при вождении может надлежащим образом выполнять помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции, при взаимодействии с операцией нажатия педали тормоза водителем.
Даже когда целевая позиция не может определяться, средство помощи может выполнять, в качестве помощи при замедлении, третью помощь, которая отличается от первой помощи, и за счет которой транспортное средство замедляется, не основываясь на операции нажатия педали тормоза водителем, когда операция нажатия педали тормоза не выполняется водителем. Например, третья помощь может представлять собой помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции, предварительно заданной на основе предварительно определенного объекта. Альтернативно, например, третья помощь может представлять собой помощь при замедлении, за счет которой транспортное средство замедляется с требуемым замедлением.
В устройстве помощи при вождении, начальное значение первого замедления может быть суммой замедления, которое запрашивается посредством операции нажатия педали тормоза в момент времени начала операции нажатия педали тормоза, и замедления, которое формируется в транспортном средстве в момент времени начала вследствие помощи при замедлении.
В случае, если транспортное средство уже замедлено посредством помощи при замедлении в момент времени начала операции нажатия педали тормоза (т.е. в случае, если транспортное средство представляет собой замедление), имеется вероятность того, что замедление транспортного средства прерывисто изменяется, когда транспортное средство начинает замедляться с первым замедлением, совпадающим с замедлением, которое запрашивается посредством операции нажатия педали тормоза в начале операции нажатия педали тормоза. Как результат, например, имеется вероятность того, что водитель, выполняющий операцию нажатия педали тормоза, ощущает недостаточность замедления и т.п. (т.е. водитель имеет некомфортное ощущение). В устройстве помощи при вождении, транспортное средство начинает замедляться с первым замедлением, совпадающим с суммой замедления, которое запрашивается посредством операции нажатия педали тормоза в начале операции нажатия педали тормоза, и замедлением, уже сформированным вследствие помощи при замедлении. Соответственно, водитель не имеет некомфортного ощущения.
С другой стороны, в случае, если транспортное средство не замедляется посредством помощи при замедлении в момент времени начала операции нажатия педали тормоза (т.е. в случае, если транспортное средство не замедляется), замедление, которое формируется в транспортном средстве в момент времени начала операции нажатия педали тормоза вследствие помощи при замедлении, равно нулю. Таким образом, начальное значение первого замедления совпадает с замедлением, которое запрашивается посредством операции нажатия педали тормоза. Другими словами, транспортное средство начинает замедляться с первым замедлением, совпадающим с замедлением, которое запрашивается посредством операции нажатия педали тормоза в начале операции нажатия педали тормоза. Тем не менее, даже когда транспортное средство начинает замедляться с первым замедлением, водитель не имеет некомфортного ощущения, поскольку транспортное средство не замедляется посредством помощи при замедлении в момент времени начала операции нажатия педали тормоза.
В устройстве помощи при вождении, второе замедление в предварительно определенный момент времени в период, в который выполняется вторая помощь, может быть большим из предварительно определенного замедления в предварительно определенный момент времени и суммы замедления, которое запрашивается посредством операции нажатия педали тормоза в предварительно определенный момент времени, и замедления, которое формируется в транспортном средстве в момент времени начала операции нажатия педали тормоза вследствие помощи при замедлении.
Устройство помощи при вождении выполняет вторую помощь, за счет которой транспортное средство замедляется со вторым замедлением, которое безусловно равно или больше предварительно определенного замедления, и в силу этого может надлежащим образом замедлять транспортное средство до целевой скорости до того, как транспортное средство достигает целевой позиции.
В устройстве помощи при вождении, электронный модуль управления может быть выполнен с возможностью определять то, что целевая позиция может определяться, когда электронный модуль управления распознает позицию, в которой замедление транспортного средства должно завершаться, и распознает первый объект в качестве предварительно определенного объекта. Первый объект может указывать то, что транспортное средство должно замедляться. Электронный модуль управления может быть выполнен с возможностью определять то, что целевая позиция не может определяться, когда электронный модуль управления распознает второй объект в качестве предварительно определенного объекта и не распознает первый объект в качестве предварительно определенного объекта. Второй объект отличается от первого объекта.
В устройстве помощи при вождении, можно надлежащим образом определять то, может или нет определяться целевая позиция.
В устройстве помощи при вождении, электронный модуль управления может быть выполнен с возможностью определять то, имеет или нет распознанный предварительно определенный объект первую надежность, на основе результата распознавания предварительно определенного объекта. Первая надежность может представлять собой надежность относительно того, что предварительно определенный объект безусловно указывает то, что транспортное средство должно замедляться. Электронный модуль управления может быть выполнен с возможностью выполнять первую помощь в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция может определяться, и определяет то, что предварительно определенный объект не имеет первой надежности. Электронный модуль управления может быть выполнен с возможностью выполнять вторую помощь в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция может определяться, и определяет то, что предварительно определенный объект имеет первую надежность.
Когда предварительно определенный объект не имеет первой надежности, имеется вероятность того, что целевая позиция, которая предположительно должна определяться, отклоняется от надлежащей целевой позиции, по сравнению с тем, когда предварительно определенный объект имеет первую надежность. Как результат, имеется относительно более высокая вероятность того, что позиция, в которой замедление транспортного средства завершается, отклоняется от надлежащей целевой позиции вследствие активного вмешательства в вождение транспортного средства посредством помощи при замедлении. Следовательно, даже когда целевая позиция может определяться, устройство помощи при вождении выполняет, в качестве помощи при замедлении, первую помощь, за счет которой транспортное средство замедляется с первым замедлением в зависимости от операции нажатия педали тормоза водителем, когда предварительно определенный объект не имеет первой надежности. Таким образом, устройство помощи при вождении выполняет переключение между первой помощью, в которой операция нажатия педали тормоза имеет приоритет, и второй помощью, в которой активное вмешательство в вождение транспортного средства посредством помощи при замедлении имеет приоритет, в зависимости от надежности предварительно определенного объекта, распознанного посредством средства распознавания, в дополнение к результату определения того, может или нет определяться целевая позиция. Следовательно, устройство помощи при вождении может более надлежащим образом выполнять помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции, при взаимодействии с операцией нажатия педали тормоза водителем.
В устройстве помощи при вождении, предварительно определенный объект может включать в себя первый объект, указывающий позицию, в которой замедление транспортного средства должно завершаться. Электронный модуль управления может быть выполнен с возможностью определять то, имеет или нет первый объект, распознанный в качестве предварительно определенного объекта, вторую надежность, на основе результата распознавания предварительно определенного объекта. Вторая надежность представляет собой надежность относительно того, что первый объект надлежащим образом указывает позицию, в которой замедление транспортного средства должно завершаться. Электронный модуль управления может быть выполнен с возможностью выполнять первую помощь в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция может определяться, и определяет то, что первый объект не имеет второй надежности. Электронный модуль управления может быть выполнен с возможностью выполнять вторую помощь в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция может определяться, и определяет то, что первый объект имеет вторую надежность.
Когда первый объект не имеет второй надежности, имеется вероятность того, что целевая позиция, которая предположительно должна определяться, отклоняется от надлежащей целевой позиции, по сравнению с тем, когда первый объект имеет вторую надежность. Как результат, имеется относительно более высокая вероятность того, что позиция, в которой замедление транспортного средства завершается, отклоняется от надлежащей целевой позиции вследствие активного вмешательства в вождение транспортного средства посредством помощи при замедлении. Следовательно, даже когда целевая позиция может определяться, устройство помощи при вождении выполняет, в качестве помощи при замедлении, первую помощь, за счет которой транспортное средство замедляется с первым замедлением в зависимости от операции нажатия педали тормоза водителем, когда первый объект не имеет второй надежности. Таким образом, устройство помощи при вождении выполняет переключение между первой помощью, в которой операция нажатия педали тормоза имеет приоритет, и второй помощью, в которой активное вмешательство в вождение транспортного средства посредством помощи при замедлении имеет приоритет, в зависимости от надежности первого объекта, распознанного посредством средства распознавания, в дополнение к результату определения того, может или нет определяться целевая позиция. Следовательно, устройство помощи при вождении может более надлежащим образом выполнять помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции, при взаимодействии с операцией нажатия педали тормоза водителем.
В устройстве помощи при вождении, электронный модуль управления может быть выполнен с возможностью определять то, возникает или нет, по меньшей мере, одно из задержки и недостаточности фактической операции нажатия педали тормоза относительно виртуальной операции нажатия педали тормоза, необходимой для того, чтобы замедлять транспортное средство до целевой скорости до того, как транспортное средство достигает целевой позиции. Электронный модуль управления может быть выполнен с возможностью выполнять первую помощь в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция может определяться, и определяет то, что не возникает ни одно из задержки и недостаточности фактической операции нажатия педали тормоза. Электронный модуль управления может быть выполнен с возможностью выполнять вторую помощь в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция может определяться, и определяет то, что возникает, по меньшей мере, одно из задержки и недостаточности фактической операции нажатия педали тормоза.
Когда задержка и недостаточность фактической операции нажатия педали тормоза не возникают, предполагается, что транспортное средство может замедляться до целевой скорости до того, как транспортное средство достигает целевой позиции посредством операции нажатия педали тормоза без активного вмешательства в вождение транспортного средства посредством помощи при замедлении. Следовательно, когда задержка и недостаточность фактической операции нажатия педали тормоза не возникают, устройство помощи при вождении выполняет, в качестве помощи при замедлении, первую помощь, за счет которой транспортное средство замедляется с первым замедлением в зависимости от операции нажатия педали тормоза водителем, даже когда целевая позиция может определяться. Таким образом, устройство помощи при вождении может выполнять переключение между первой помощью, в которой операция нажатия педали тормоза имеет приоритет, и второй помощью, в которой активное вмешательство в вождение транспортного средства посредством помощи при замедлении имеет приоритет, в зависимости от того, возникает или нет задержка или недостаточность фактической операции нажатия педали тормоза, в дополнение к результату определения того, может или нет определяться целевая позиция. Следовательно, устройство помощи при вождении может более надлежащим образом выполнять помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции, при взаимодействии с операцией нажатия педали тормоза водителем.
В устройстве помощи при вождении, транспортное средство может включать в себя детектор, выполненный с возможностью обнаруживать ситуацию впереди транспортного средства. Электронный модуль управления может быть выполнен с возможностью распознавать ситуацию впереди транспортного средства на основе результата обнаружения детектора.
Второй аспект изобретения заключается в способе помощи при вождении для транспортного средства. Транспортное средство включает в себя электронный модуль управления и детектор. Электронный модуль управления выполнен с возможностью выполнять помощь при замедлении, за счет которой транспортное средство замедляется до целевой скорости до того, как транспортное средство достигает целевой позиции. Детектор выполнен с возможностью обнаруживать ситуацию впереди транспортного средства. Способ помощи при вождении включает в себя: распознавание ситуации впереди транспортного средства на основе результата обнаружения детектора; определение того, может или нет целевая позиция определяться из предварительно определенного объекта, когда электронный модуль управления распознает то, что предварительно определенный объект существует впереди транспортного средства, причем предварительно определенный объект указывает то, что транспортное средство должно замедляться; выполнение первой помощи в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция не может определяться, причем первая помощь представляет собой помощь, за счет которой транспортное средство замедляется с первым замедлением, причем первое замедление изменяется на основе операции нажатия педали тормоза водителем; и выполнение второй помощи в качестве помощи при замедлении, когда электронный модуль управления определяет то, что целевая позиция может определяться, причем вторая помощь представляет собой помощь, за счет которой транспортное средство замедляется со вторым замедлением, причем второе замедление равно или выше предварительно определенного замедления, необходимого для того, чтобы замедлять транспортное средство до целевой скорости до того, как транспортное средство достигает целевой позиции, определенной из предварительно определенного объекта.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой, показывающей конфигурацию транспортного средства в варианте осуществления;
Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций помощи при замедлении;
Фиг. 3 является блок-схемой последовательности операций способа, показывающей последовательность операций поведения для задания целевого замедления в соответствии с приоритетным для водителя критерием;
Фиг. 4 является блок-схемой последовательности операций способа, показывающей последовательность операций поведения для задания целевого замедления в соответствии с приоритетным для системы критерием;
Фиг. 5 является временной диаграммой, показывающей целевое замедление, которое должно задаваться посредством помощи при замедлении, которая выполняется, когда транспортное средство движется к стоп-линии со светофором, вместе с запрашиваемым системой замедлением и запрашиваемым водителем замедлением;
Фиг. 6 является блок-схемой последовательности операций способа, показывающей последовательность операций первой модификации помощи при замедлении;
Фиг. 7 является блок-схемой последовательности операций способа, показывающей последовательность операций второй модификации помощи при замедлении;
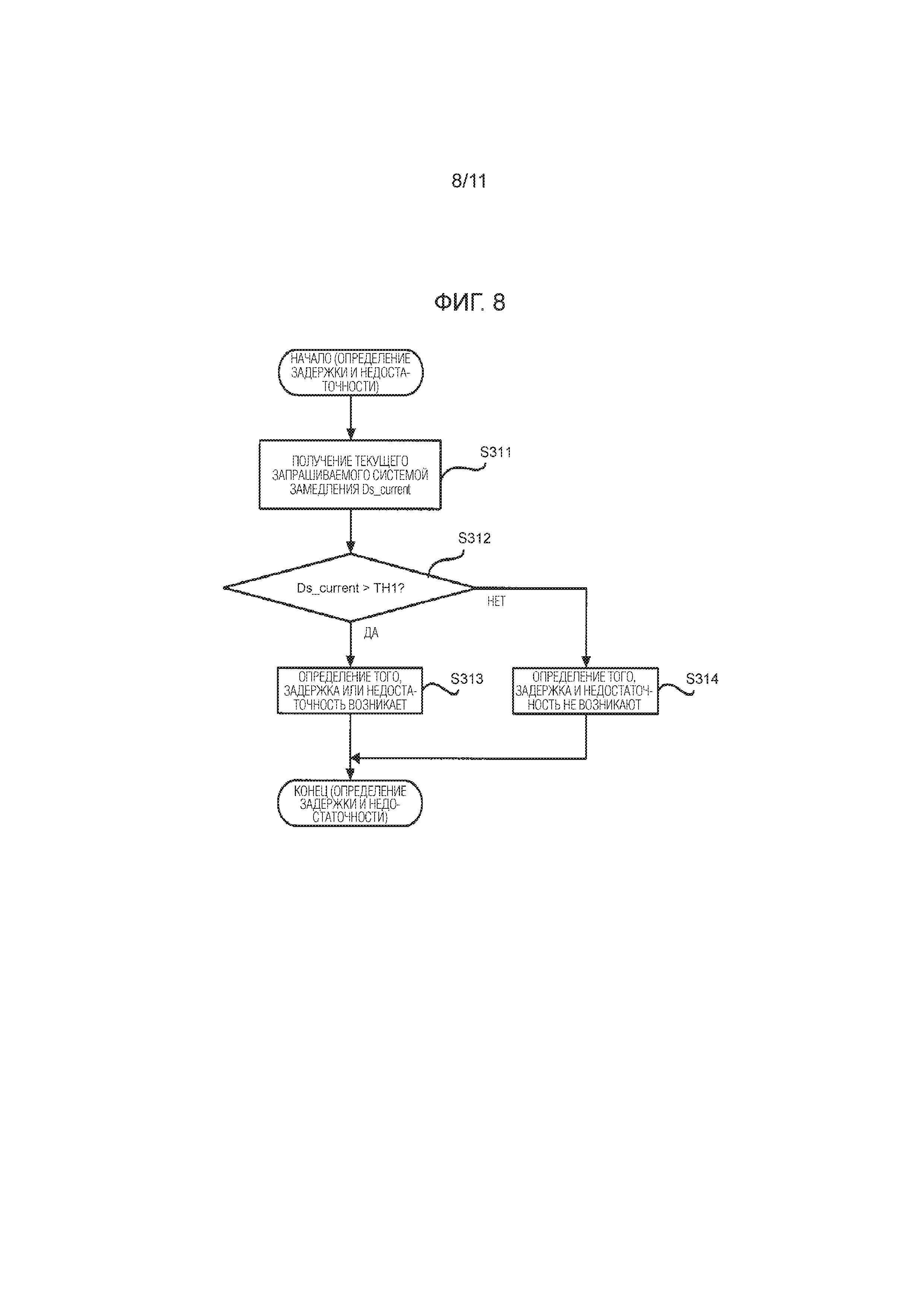
Фиг. 8 является блок-схемой последовательности операций способа, показывающей последовательность операций первого примера процесса определения того, возникает либо нет задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза;
Фиг. 9 является блок-схемой последовательности операций способа, показывающей последовательность операций второго примера процесса определения того, возникает либо нет задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза;
Фиг. 10 является картой определения, которая используется во втором примере процесса определения того, возникает либо нет задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза; и
Фиг. 11 является временной диаграммой, показывающей другой пример целевого замедления, которое должно задаваться посредством помощи при замедлении, которая выполняется, когда транспортное средство движется к стоп-линии со светофором, вместе с запрашиваемым системой замедлением и запрашиваемым водителем замедлением.
Подробное описание вариантов осуществления изобретения
В дальнейшем в этом документе описывается вариант осуществления устройства помощи при вождении со ссылкой на чертежи. В дальнейшем в этом документе описание приводится с использованием транспортного средства 1, оснащенного вариантом осуществления устройства помощи при вождении.
Конфигурация транспортного средства 1
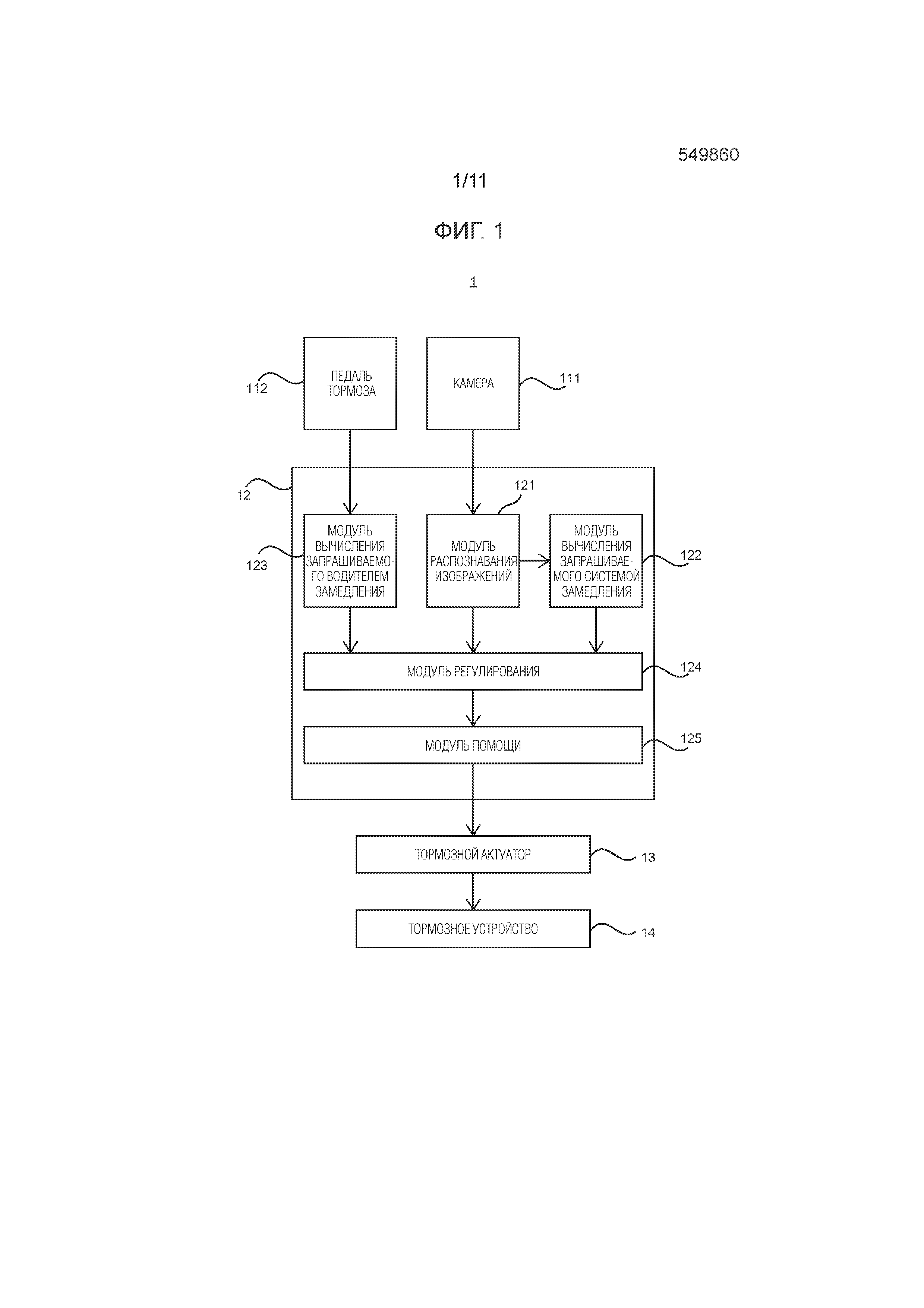
Во-первых, описывается конфигурация транспортного средства 1 в варианте осуществления со ссылкой на фиг. 1. Фиг. 1 является блок-схемой, показывающей конфигурацию транспортного средства 1 в варианте осуществления.
Как показано на фиг. 1, транспортное средство 1 включает в себя камеру 111, педаль 112 тормоза, тормозной актуатор 13, тормозное устройство 14 и электронный модуль 12 управления (ECU), который представляет собой конкретный пример "устройства помощи при вождении".
Камера 111 представляет собой пример детектора и представляет собой устройство захвата изображений, которое захватывает вид впереди транспортного средства 1. Изображение, захваченное посредством камеры 111 (т.е. изображение, показывающее ситуацию впереди транспортного средства 1), выводится из камеры 111 в ECU 12.
Педаль 112 тормоза представляет собой рабочую педаль, которая управляется водителем для торможения транспортного средства 1. Управляющий сигнал, указывающий содержимое операции нажатия педали 112 тормоза, вводится в ECU 12.
ECU 12 управляет поведением всего транспортного средства 1. В варианте осуществления, в частности, ECU 12 выполняет помощь при замедлении, за счет которой транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции. В помощи при замедлении, когда целевая скорость задается равной нулю, помощь при замедлении, за счет которой транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, является практически эквивалентной помощи при остановке, за счет которой транспортное средство 1 останавливается в целевой позиции. Следовательно, в варианте осуществления, "помощь при замедлении" включает в себя "помощь при остановке".
Для выполнения помощи при замедлении, ECU 12 включает в себя модуль 121 распознавания изображений, модуль 122 вычисления запрашиваемого системой замедления (в дальнейшем в этом документе, для удобства описания, называемый просто "модулем 122 вычисления замедления"), модуль 123 вычисления запрашиваемого водителем замедления (в дальнейшем в этом документе, для удобства описания, называемый просто "модулем 123 вычисления замедления"), модуль 124 регулирования и модуль 125 помощи, в качестве блоков обработки, которые логически реализованы в ECU 12. Ниже подробно описывается каждое поведение модуля 121 распознавания изображений, модуля 122 вычисления замедления, модуля 123 вычисления замедления, модуля 124 регулирования и модуля 125 помощи (см. фиг. 2 и т.п.). Здесь кратко описываются основные принципы. Модуль 121 распознавания изображений распознает предварительно определенную цель замедления, указывающую то, что транспортное средство 1 должно замедляться, из изображения, захваченного посредством камеры 111. Цель замедления представляет собой конкретный пример каждого из "предварительно определенного объекта" и "второго объекта". Модуль 122 вычисления замедления задает целевую позицию на основе цели замедления, распознанной посредством модуля 121 распознавания изображений, и вычисляет замедление Ds (в дальнейшем в этом документе называемое "запрашиваемым системой замедлением"), необходимое для того, чтобы замедлять транспортное средство 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции. Модуль 123 вычисления замедления вычисляет замедление Dd (в дальнейшем в этом документе называемое "запрашиваемым водителем замедлением"), которое запрашивается водителем, который нажимает педаль 112 тормоза, на основе содержимого операции нажатия педали 112 тормоза. Модуль 124 регулирования задает целевое значение D_target (в дальнейшем в этом документе называемое "целевым замедлением" при необходимости) замедления транспортного средства 1, когда транспортное средство 1 замедляется посредством помощи при замедлении, на основе, по меньшей мере, одного из запрашиваемого системой замедления Ds, вычисленного посредством модуля 122 вычисления замедления, и запрашиваемого водителем замедления Dd, вычисленного посредством модуля 123 вычисления замедления. Модуль 125 помощи управляет тормозным актуатором 13 таким образом, что транспортное средство 1 замедляется с целевым замедлением D_target, заданным посредством модуля 124 регулирования.
Под управлением посредством модуля 125 помощи, тормозной актуатор 13 управляет тормозным устройством 14, которое может тормозить непроиллюстрированные колеса, с тем чтобы обеспечивать тормозную мощность для транспортного средства 1. Как результат, транспортное средство 1 замедляется посредством помощи при замедлении, которая выполняется посредством модуля 125 помощи. Как следствие, транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, без необходимости операции нажатия педали 112 тормоза водителем. Альтернативно, осуществляется помощь в операции нажатия педали 112 тормоза водителем, чтобы замедлять транспортное средство 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции.
Помощь при замедлении, которая должна выполняться посредством ECU 12
Далее описывается содержимое помощи при замедлении, которая должна выполняться посредством ECU 12.
Последовательность операций помощи при замедлении
Ниже описывается содержимое помощи при замедлении, которая должна выполняться посредством ECU 12, со ссылкой на фиг. 2. Фиг. 2 является блок-схемой последовательности операций способа, показывающей последовательность операций помощи при замедлении, которая должна выполняться посредством ECU 12.
Как показано на фиг. 2, во-первых, модуль 124 регулирования определяет то, распознает или нет модуль 121 распознавания изображений предварительно определенную цель замедления, указывающую то, что транспортное средство 1 должно замедляться (другими словами, что предположительно показывает то, что транспортное средство 1 должно замедляться, непосредственно, косвенно или неявно) в изображении, захваченном посредством камеры 111 (этап S11). Камера 111 продолжает фотографировать вид впереди транспортного средства 1 в то время, когда выполняется помощь при замедлении, показанная на фиг. 2. Следовательно, модуль 121 распознавания изображений продолжает выполнять процесс обнаружения цели замедления в изображении, захваченном посредством камеры 111 в то время, когда выполняется помощь при замедлении, показанная на фиг. 2.
Как описано выше, в варианте осуществления, помощь при замедлении включает в себя помощь при остановке. Следовательно, цель замедления включает в себя не только цель, указывающую то, что транспортное средство 1 должно замедляться, но также и цель, указывающую то, что транспортное средство 1 должно быть остановлено. В качестве примера цели замедления, предусмотрено, по меньшей мере, одно из дорожного знака (т.е. знака, который задается на дороге), дорожной метки (т.е. метки, которая нарисована на поверхности дороги) и светофора, которые требуют или рекомендуют замедление или остановку транспортного средства на основе законов. Примеры дорожного знака включают в себя дорожный знак, который требует остановки (т.е. дорожный знак, который указывает знак "остановки"), дорожный знак, который требует медленного движения, дорожный знак, который указывает наличие пешеходного перехода, и дорожный знак, который указывает наличие школы. Примеры дорожной метки включают в себя стоп-линию, которая указывает позицию остановки, дорожную метку, которая указывает зону без остановок (например, позицию около ворот отделения полиции или пожарной части), дорожную метку, которая указывает школьную зону, дорожную метку, которая указывает пешеходный переход или выдает уведомление касательно того, что пешеходный переход существует впереди. В качестве другого примера цели замедления, имеется физический объект, указывающий то, что транспортное средство 1 должно замедляться или останавливаться для предотвращения столкновения между транспортным средством 1 и физическим объектом, хотя физический объект не требует или рекомендует замедление или остановку транспортного средства 1 на основе законов. Примеры физического объекта включают в себя едущее впереди транспортное средство, которое движется впереди транспортного средства 1, другое транспортное средство, которое паркуется или останавливается на дороге впереди транспортного средства 1, помеху, которая находится на дороге впереди транспортного средства 1, и конструкцию, которая существует впереди транспортного средства 1 (например, дорожное ограждение, которое существует впереди транспортного средства 1, движущегося к Т-образному перекрестку).
В случае, если модуль 124 регулирования определяет то, что цель замедления не распознается, в качестве результата определения на этапе S11 (этап S11: "Нет"), ECU 12 завершает помощь при замедлении, показанную на фиг. 2. В случае, если ECU 12 завершает помощь при замедлении, показанную на фиг. 2, ECU 12 начинает помощь при замедлении, показанную на фиг. 2, снова после того, как предварительно определенный период истекает.
С другой стороны, в случае, если модуль 124 регулирования определяет то, что цель замедления распознается, в качестве результата определения на этапе S11 (этап S11: "Да"), модуль 124 регулирования дополнительно определяет то, распознает или нет модуль 121 распознавания изображений цель позиции, указывающую позицию, в которой замедление транспортного средства 1 должно завершаться, в изображении, захваченном посредством камеры 111 (этап S12). Как описано выше, в варианте осуществления, помощь при замедлении включает в себя помощь при остановке. Следовательно, цель позиции включает в себя не только цель, указывающую позицию, в которой замедление транспортного средства 1 должно завершаться, но также и цель, указывающую позицию, в которой остановка транспортного средства 1 должна завершаться (т.е. позицию, в которой транспортное средство 1 должно останавливаться). Цель позиции представляет собой конкретный пример каждого из "предварительно определенного объекта" и "первого объекта".
В качестве примера цели позиции, имеется, по меньшей мере, одно из дорожного знака и дорожной метки, которые непосредственно указывают позицию, в которой транспортное средство 1 должно останавливаться, или позицию, в которой замедление транспортного средства 1 должно завершаться в соответствии с определением согласно законам. Примеры дорожного знака включают в себя дорожный знак, который задается только около стоп-линии, и который указывает позицию стоп-линии. Примеры дорожной метки включают в себя стоп-линию, которая указывает позицию остановки, дорожную метку, которая указывает зону без остановок, и пешеходный переход. В качестве другого примера цели позиции, имеется физический объект, который косвенно или неявно указывает позицию, в которой транспортное средство 1 должно останавливаться, или позицию, в которой замедление транспортного средства 1 должно завершаться, хотя физический объект непосредственно не указывает позицию, в которой транспортное средство 1 должно останавливаться, или позицию, в которой замедление транспортного средства 1 должно завершаться. Примеры физического объекта включают в себя едущее впереди транспортное средство, которое останавливается впереди транспортного средства 1, другое транспортное средство, которое паркуется или останавливается на дороге впереди транспортного средства 1, помеху, которая находится на дороге впереди транспортного средства 1, и конструкцию, которая существует впереди транспортного средства 1 (например, дорожное ограждение, которое существует впереди транспортного средства 1, движущегося к Т-образному перекрестку). Это обусловлено тем, что транспортное средство 1 должно останавливаться, или замедление транспортного средства 1 должно завершаться в позиции позади физического объекта для предотвращения столкновения с физическим объектом.
Можно сказать, что цель позиции естественно указывает то, что транспортное средство 1 должно замедляться, поскольку цель позиции указывает позицию, в которой замедление транспортного средства 1 должно завершаться. Следовательно, цель позиции включена в цель замедления. Соответственно, в случае, если модуль 124 регулирования определяет то, что цель позиции распознается в качестве цели замедления на этапе S11, модуль 124 регулирования определяет то, что цель позиции распознается, также на следующем этапе S12. С другой стороны, в случае, если модуль 124 регулирования определяет то, что цель замедления, отличная от цели позиции, распознается на этапе S11, модуль 124 регулирования определяет то, дополнительно распознана или нет конкретная цель позиции, ассоциированная с целью замедления, распознанной на этапе S11, на следующем этапе S12. Конкретная цель позиции представляет собой цель позиции, фактически указывающую позицию, в которой замедление транспортного средства 1, распознающего цель замедления, распознанную на этапе S11, должно завершаться.
В случае, если модуль 124 регулирования определяет то, что цель позиции не распознается, в качестве результата определения на этапе S12 (этап S12: "Нет"), модуль 122 вычисления замедления не может определять целевую позицию. Это обусловлено тем, что цель позиции, фактически указывающая целевую позицию, по-прежнему не распознается. Модуль 122 вычисления замедления может задавать предварительную целевую позицию на основе цели остановки или цели замедления, распознанной посредством модуля 121 распознавания изображений, но имеется вероятность того, что заданная предварительная целевая позиция отклоняется от надлежащей окончательной целевой позиции (т.е. позиции, которая указывается посредством цели позиции, и в которой замедление транспортного средства 1 должно завершаться). Соответственно, даже когда модуль 125 помощи активно вмешивается в вождение транспортного средства 1 на основе предварительной целевой позиции, имеется вероятность того, что позиция, в которой замедление транспортного средства 1 завершается, отклоняется от надлежащей окончательной целевой позиции вследствие вмешательства.
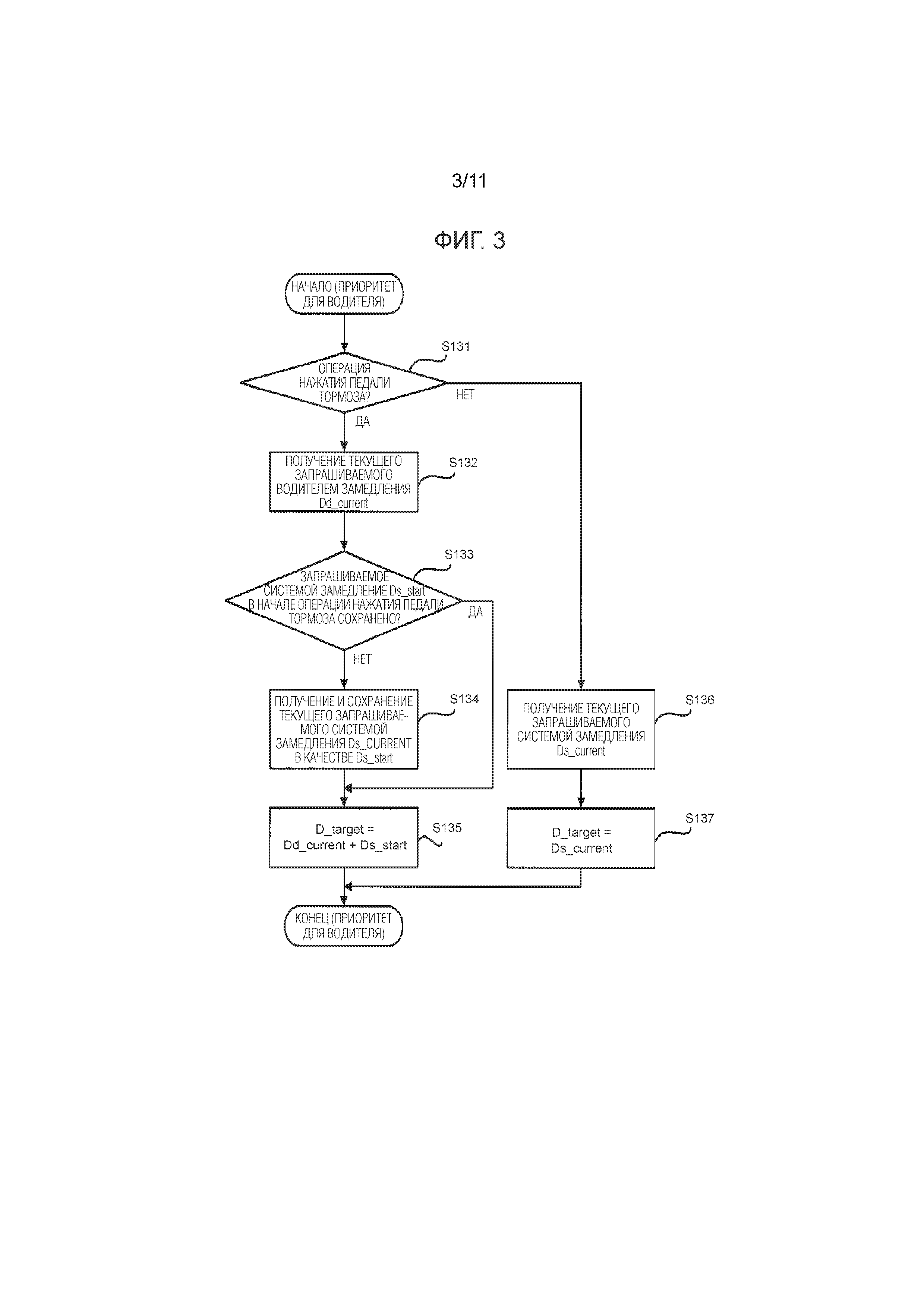
Следовательно, в случае, если модуль 122 вычисления замедления не может определять целевую позицию, поскольку цель позиции не распознается таким образом, модуль 124 регулирования задает целевое замедление D_target, в соответствии с приоритетным для водителя критерием, в котором операция (в дальнейшем в этом документе называемая "операцией нажатия педали тормоза") нажатия педали 112 тормоза водителем имеет приоритет относительно активного вмешательства в вождение транспортного средства 1 посредством модуля 125 помощи (этап S13). После этого подробнее описывается поведение для задания целевого замедления D_target в соответствии с приоритетным для водителя критерием со ссылкой на фиг. 3. Фиг. 3 является блок-схемой последовательности операций способа, показывающей последовательность операций поведения для задания целевого замедления D_target в соответствии с приоритетным для водителя критерием.
Как показано на фиг. 3, модуль 124 регулирования определяет то, нажимает или нет водитель педаль 112 тормоза (этап S131).
В случае, если модуль 124 регулирования определяет то, что водитель не нажимает педаль 112 тормоза, в качестве результата определения на этапе S131 (этап S131: "Нет"), модуль 124 регулирования получает текущее запрашиваемое системой замедление Ds_current из модуля 122 вычисления замедления (этап S136). Модуль 122 вычисления замедления продолжает выполнять процесс вычисления запрашиваемого системой замедления Ds в то время, когда цель замедления (или цель позиции) распознается. Текущее запрашиваемое системой замедление Ds_current представляет собой прошлое запрашиваемое системой замедление Ds, вычисленное посредством модуля 122 вычисления замедления (т.е. последнее запрашиваемое системой замедление Ds).
В случае, если целевое замедление D_target задается в соответствии с приоритетным для водителя критерием, целевая позиция не определена. В этом случае, модуль 122 вычисления замедления задает предварительную целевую позицию на основе цели замедления, распознанной на этапе S11 по фиг. 2. Например, предварительная целевая позиция может задаваться в качестве позиции, в которой существует цель замедления, может задаваться в качестве позиции, которая сдвигается на первую предварительно определенную величину от позиции, в которой существует цель замедления, в дальнюю сторону (т.е. в сторону, которая является удаленной от транспортного средства 1), или может задаваться в качестве позиции, которая сдвигается на вторую предварительно определенную величину от позиции, в которой существует цель замедления, в ближнюю сторону (т.е. в сторону, которая находится рядом с транспортным средством 1). После этого, модуль 122 вычисления замедления вычисляет замедление, необходимое для того, чтобы замедлять транспортное средство 1 до целевой скорости до того, как транспортное средство 1 достигает предварительной целевой позиции, в качестве запрашиваемого системой замедления Ds. В частности, модуль 122 вычисления замедления вычисляет расстояние d1 от текущей позиции транспортного средства 1 до предварительной целевой позиции. После этого, модуль 122 вычисления замедления вычисляет запрашиваемое системой замедление Ds, на основе вычисленного расстояния d1 и текущей скорости V1 транспортного средства для транспортного средства 1. Например, модуль 123 помощи может вычислять запрашиваемое системой замедление Ds, с использованием формулы Ds=V12/d1. Здесь, модуль 122 вычисления замедления может вычислять запрашиваемое системой замедление Ds без задания предварительной целевой позиции.
После этого, модуль 124 регулирования задает текущее запрашиваемое системой замедление Ds_current, полученное из модуля 122 вычисления замедления на этапе S136, в качестве целевого замедления D_target (этап S137).
С другой стороны, в случае, если модуль 124 регулирования определяет то, что водитель нажимает педаль 112 тормоза, в качестве результата определения на этапе S131 (этап S131: "Да"), модуль 124 регулирования получает текущее запрашиваемое водителем замедление Dd_current из модуля 123 вычисления замедления (этап S132). Модуль 123 вычисления замедления продолжает выполнять процесс вычисления запрашиваемого водителем замедления Dd в то время, когда распознается цель замедления (или цель позиции). Текущее запрашиваемое водителем замедление Dd_current представляет собой прошлое запрашиваемое водителем замедление Dd, вычисленное посредством модуля 123 вычисления замедления (т.е. последнее запрашиваемое водителем замедление Dd).
После этого, модуль 124 регулирования определяет то, сохранено или нет запрашиваемое системой замедление Ds_start в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза (этап S133).
В случае, если модуль 124 регулирования определяет то, что запрашиваемое системой замедление Ds_start не сохранено, в качестве результата определения на этапе S133 (этап S133: "Нет"), оценивается то, что водитель сначала нажимает педаль 112 тормоза в момент времени, когда модуль 124 регулирования определяет на этапе S131 то, что водитель нажимает педаль 112 тормоза. Таким образом, оценивается то, что водитель начинает операцию нажатия педали 112 тормоза в момент времени, когда модуль 124 регулирования определяет на этапе S131 то, что водитель нажимает педаль 112 тормоза. В этом случае, модуль 124 регулирования получает текущее запрашиваемое системой замедление Ds_current (т.е. запрашиваемое системой замедление Ds в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза) из модуля 122 вычисления замедления (этап S134). Кроме того, модуль 124 регулирования сохраняет полученное запрашиваемое системой замедление Ds_current в качестве запрашиваемого системой замедления Ds_start (этап S134). В случае, если запрашиваемое системой замедление Ds_current, полученное на этапе S134, превышает нуль, предполагается, что транспортное средство 1 замедляется с запрашиваемым системой замедлением Ds_current под управлением посредством модуля 125 помощи в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза. С другой стороны, в случае, если запрашиваемое системой замедление Ds_current, полученное на этапе S134, равно нулю, предполагается, что транспортное средство 1 не замедляется под управлением посредством модуля 125 помощи в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза.
С другой стороны, в случае, если запрашиваемое системой замедление Ds_start сохранено, в качестве результата определения на этапе S133 (этап S133: "Да"), модуль 124 регулирования не выполняет вышеописанный процесс этапа S134.
После этого, модуль 124 регулирования задает сумму текущего запрашиваемого водителем замедления Dd_current, полученного из модуля 123 вычисления замедления на этапе S132, и запрашиваемого системой замедления Ds_start, сохраненного в модуле 124 регулирования, в качестве целевого замедления D_target (этап S135). В случае, если транспортное средство 1 не замедляется под управлением посредством модуля 125 помощи в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза, запрашиваемое системой замедление Ds_start равно нулю. Следовательно, на этапе S135, модуль 124 регулирования фактически задает текущее запрашиваемое водителем замедление Dd_current, полученное из модуля 123 вычисления замедления на этапе S132, в качестве целевого замедления D_target.
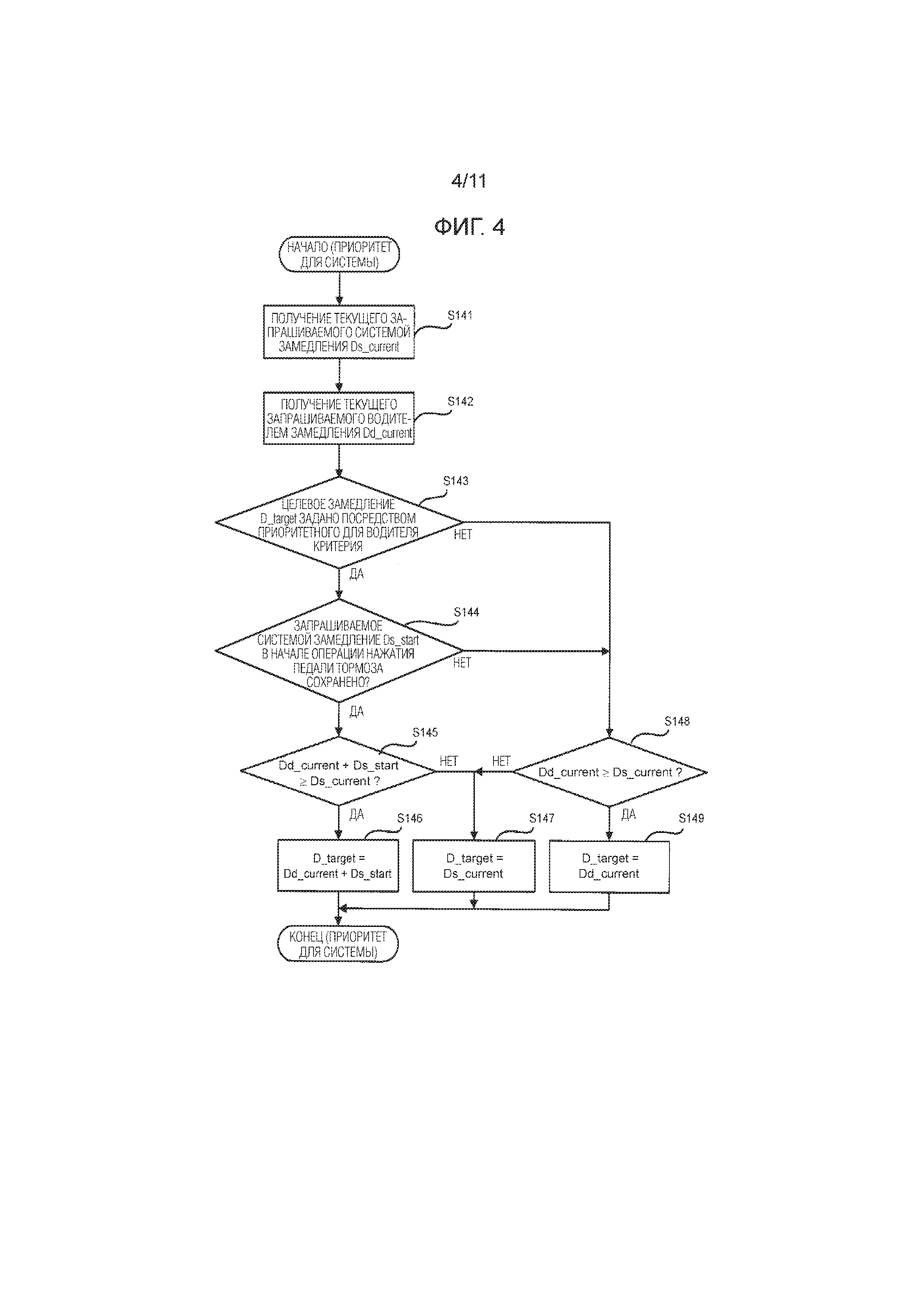
Возвращаясь к фиг. 2, с другой стороны, в случае, если модуль 124 регулирования определяет то, что цель позиции распознается, в качестве результата определения на этапе S12 (этап S12: "Да"), модуль 122 вычисления замедления может определять целевую позицию на основе распознанной цели позиции. Следовательно, даже когда модуль 125 помощи активно вмешивается в вождение транспортного средства 1 на основе определенной целевой позиции, позиция, в которой замедление транспортного средства 1 завершается посредством вмешательства, не отклоняется от надлежащей окончательной целевой позиции. Следовательно, в этом случае, модуль 124 регулирования задает целевое замедление D_target в соответствии с приоритетным для системы критерием, в котором активное вмешательство в вождение транспортного средства 1 посредством модуля 125 помощи имеет приоритет относительно операции нажатия педали тормоза (этап S14). После этого подробнее описывается поведение для задания целевого замедления D_target в соответствии с приоритетным для системы критерием со ссылкой на фиг. 4. Фиг. 4 является блок-схемой последовательности операций способа, показывающей последовательность операций поведения для задания целевого замедления D_target в соответствии с приоритетным для системы критерием.
Как показано на фиг. 4, модуль 124 регулирования получает текущее запрашиваемое системой замедление Ds_current из модуля 122 вычисления замедления (этап S141). На стадии этапа S141, модуль 122 вычисления замедления может определять целевую позицию и в силу этого может вычислять запрашиваемое системой замедление Ds_current на основе определенной целевой позиции. Кроме того, модуль 124 регулирования получает текущее запрашиваемое водителем замедление Dd_current из модуля 123 вычисления замедления (этап S142). Кроме того, модуль 124 регулирования определяет то, уже задано или нет целевое замедление D_target в соответствии с приоритетным для водителя критерием (т.е. посредством поведения, показанного на фиг. 3) (этап S143). Таким образом, модуль 124 регулирования определяет то, уже задано или нет целевое замедление D_target в соответствии с приоритетным для водителя критерием, до того, как целевое замедление D_target задается в соответствии с приоритетным для системы критерием.
В случае, если модуль 124 регулирования определяет то, что целевое замедление D_target уже задано в соответствии с приоритетным для водителя критерием, в качестве результата определения на этапе S143 (этап S143: "Да"), модуль 124 регулирования определяет то, сохранено или нет запрашиваемое системой замедление Ds_start в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза (этап S144). В случае, если целевое замедление D_target уже задано в соответствии с приоритетным для водителя критерием, типично, имеется высокая вероятность того, что модуль 124 регулирования сохраняет запрашиваемое системой замедление Ds_start. Тем не менее, в случае, если водитель не нажимает педаль 112 тормоза (этап S131 на фиг. 3: "Нет"), даже когда целевое замедление D_target уже задано в соответствии с приоритетным для водителя критерием, модуль 124 регулирования еще не сохраняет запрашиваемое системой замедление Ds_start.
В случае, если модуль 124 регулирования определяет то, что запрашиваемое системой замедление Ds_start сохранено, в качестве результата определения на этапе S144 (этап S144: "Да"), оценивается то, что водитель нажимает педаль 112 тормоза в то время, когда целевое замедление D_target задано в соответствии с приоритетным для водителя критерием. В этом случае, модуль 124 регулирования определяет то, равна или выше либо нет сумма текущего запрашиваемого водителем замедления Dd_current, полученного из модуля 123 вычисления замедления на этапе S142, и сохраненного запрашиваемого системой замедления Ds_start, текущего запрашиваемого системой замедления Ds_current, полученного из модуля 122 вычисления замедления на этапе S141 (этап S145). В случае, если транспортное средство 1 не замедляется под управлением модуля 125 помощи в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза, запрашиваемое системой замедление Ds_start равно нулю. Следовательно, на этапе S145, модуль 124 регулирования фактически определяет то, равно или выше либо нет текущее запрашиваемое водителем замедление Dd_current, полученное из модуля 123 вычисления замедления на этапе S142, текущего запрашиваемого системой замедления Ds_current, полученного из модуля 122 вычисления замедления на этапе S141. В случае, если модуль 124 регулирования определяет то, что сумма запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_start равна или выше запрашиваемого системой замедления Ds_current, в качестве результата определения на этапе S145 (этап S145: "Да"), модуль 124 регулирования задает сумму запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_start, в качестве целевого замедления D_target (этап S146). С другой стороны, в случае, если модуль 124 регулирования определяет то, что сумма запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_start меньше запрашиваемого системой замедления Ds_current, в качестве результата определения на этапе S145 (этап S145: "Нет"), модуль 124 регулирования задает запрашиваемое системой замедление Ds_current, в качестве целевого замедления D_target (этап S147). Таким образом, модуль 124 регулирования задает значение большего из суммы запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_start и запрашиваемого системой замедления Ds_current в качестве целевого замедления D_target.
С другой стороны, в случае, если модуль 124 регулирования определяет то, что запрашиваемое системой замедление Ds_start не сохранено, в качестве результата определения на этапе S144 (этап S144: "Нет"), оценивается то, что водитель не нажимает педаль 112 тормоза в то время, когда целевое замедление D_target задано в соответствии с приоритетным для водителя критерием. В этом случае, модуль 124 регулирования определяет то, равно или выше либо нет текущее запрашиваемое водителем замедление Dd_current, полученное из модуля 123 вычисления замедления на этапе S142, текущего запрашиваемого системой замедления Ds_current, полученного из модуля 122 вычисления замедления на этапе S141 (этап S148). В случае, если модуль 124 регулирования определяет то, что запрашиваемое водителем замедление Dd_current равно или выше запрашиваемого системой замедления Ds_current, в качестве результата определения на этапе S148 (этап S148: "Да"), модуль 124 регулирования задает запрашиваемое водителем замедление Dd_current в качестве целевого замедления D_target (этап S149). С другой стороны, в случае, если модуль 124 регулирования определяет то, что запрашиваемое водителем замедление Dd_current меньше запрашиваемого системой замедления Ds_current, в качестве результата определения на этапе S148 (этап S148: "Нет"), модуль 124 регулирования задает запрашиваемое системой замедление Ds_current в качестве целевого замедления D_target (этап S147). Таким образом, модуль 124 регулирования задает значение большего из запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_current в качестве целевого замедления D_target.
С другой стороны, в случае, если модуль 124 регулирования определяет то, что целевое замедление D_target не задано в соответствии с приоритетным для водителя критерием, в качестве результата определения на этапе S143 (этап S143: "Нет"), модуль 124 регулирования задает значение большего из запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_current в качестве целевого замедления D_target (этапы S147-S149).
Процессы после этапа S148 являются эквивалентными процессам после этапа S145, которые выполняются в то время, когда запрашиваемое системой замедление Ds_start равно нулю. Соответственно, в каждом из случая, в котором модуль 124 регулирования определяет то, что целевое замедление D_target не задано в соответствии с приоритетным для водителя критерием на этапе S143, и случая, в котором модуль 124 регулирования определяет то, что запрашиваемое системой замедление Ds_start не сохранено на этапе S144, модуль 124 регулирования может задавать запрашиваемое системой замедление Ds_start равным нулю и затем выполнять процессы после этапа S145 вместо процессов после этапа S148.
Возвращаясь к фиг. 2, после этого, модуль 125 помощи управляет транспортным средством 1 (в частности, тормозным актуатором 13) таким образом, что транспортное средство 1 замедляется с целевым замедлением D_target, вычисленным посредством модуля 124 регулирования (этап S15). Таким образом, модуль 125 помощи управляет тормозным актуатором 13, с тем чтобы обеспечивать для транспортного средства 1 тормозную мощность, которая позволяет транспортному средству 1 замедляться с вычисленным целевым замедлением D_target. Как результат, транспортное средство 1 замедляется с целевым замедлением D_target.
После этого, модуль 125 помощи определяет то, удовлетворяется или нет предварительно определенное условие завершения, которое должно удовлетворяться для окончания помощи при замедлении (этап S16). Условие завершения может включать в себя такое первое условие, что скорость транспортного средства для транспортного средства 1 совпадает с целевой скоростью (т.е. скорость транспортного средства снижается до целевой скорости). Условие завершения может включать в себя такое второе условие, что транспортное средство 1 достигает определенной целевой позиции (или предварительной целевой позиции, в некоторых ситуациях). Условие завершения может включать в себя такое третье условие, что водитель запрашивает прекращение помощи при замедлении.
В случае, если модуль 125 помощи определяет то, что условие завершения удовлетворяется, в качестве результата определения на этапе S16 (этап S16: "Да"), ECU 12 завершает помощь при замедлении. Когда помощь при замедлении завершается, целевое замедление D_target, заданное посредством модуля 124 регулирования, и запрашиваемое системой замедление Ds_start, сохраненное в модуле 124 регулирования, сбрасываются. С другой стороны, в случае, если модуль 125 помощи определяет то, что условие завершения не удовлетворяется, в качестве результата определения на этапе S16 (этап S16: "Нет"), ECU 12 продолжает помощь при замедлении посредством повторения процессов после этапа S12.
Конкретный пример помощи при замедлении
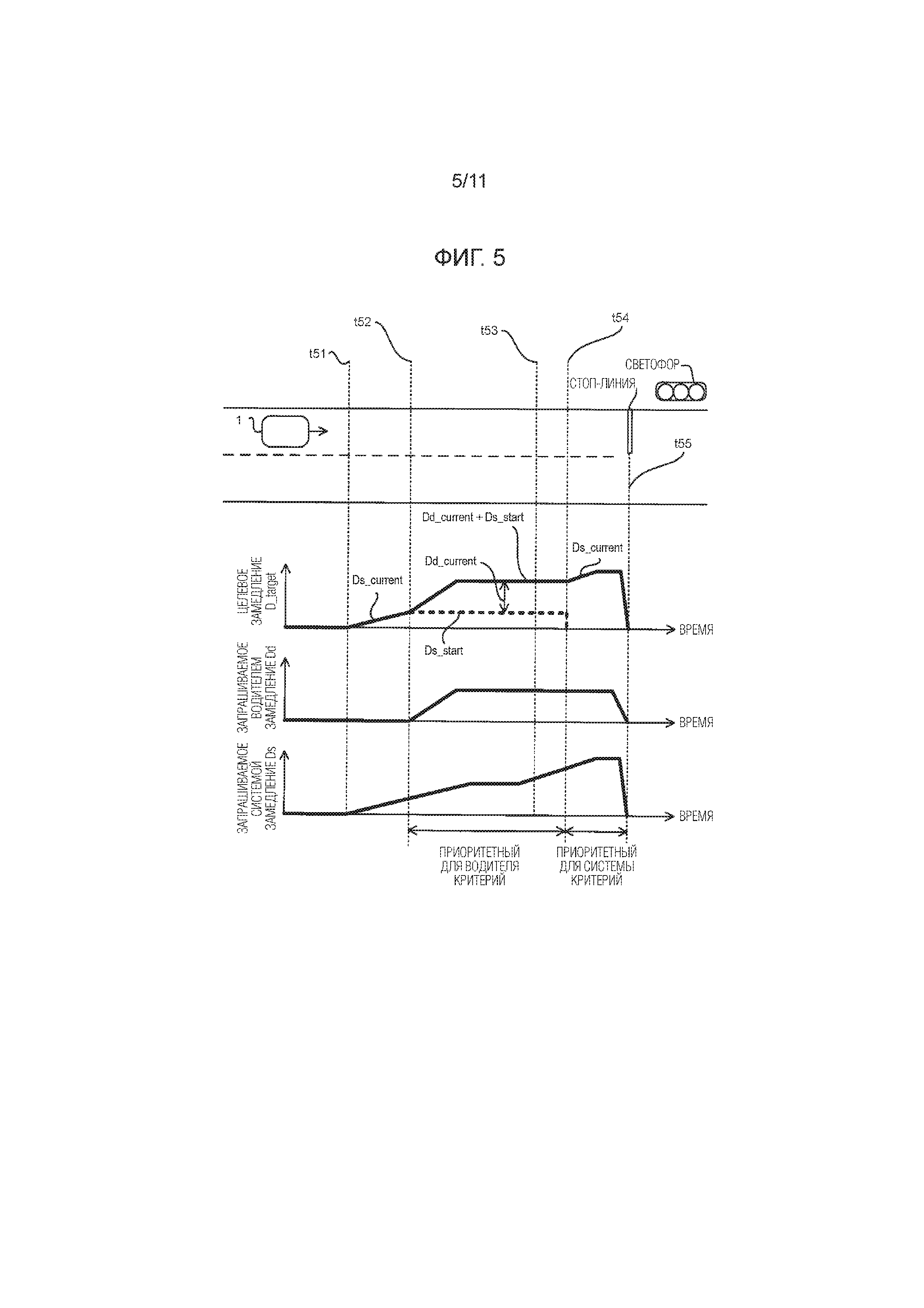
Далее, в качестве конкретного примера помощи при замедлении, описывается помощь при замедлении, которая выполняется, когда транспортное средство 1 движется к стоп-линии со светофором, со ссылкой на фиг. 5. Фиг. 5 является временной диаграммой, показывающей целевое замедление D_target, которое должно задаваться посредством помощи при замедлении, которая выполняется, когда транспортное средство 1 движется к стоп-линии со светофором, вместе с запрашиваемым системой замедлением Ds и запрашиваемым водителем замедлением Dd, вычисленными посредством модулей 122, 123 вычисления замедления, соответственно.
На фиг. 5, во время t51, модуль 121 распознавания изображений распознает светофор, на котором цвет света является красным (т.е. цветом, требующим остановки транспортного средства 1), в качестве цели замедления. Светофор не представляет собой цель позиции, поскольку светофор не представляет собой цель, указывающую позицию, в которой транспортное средство 1 должно останавливаться. Между тем, во время t51, модуль 121 распознавания изображений не распознает стоп-линию, указывающую позицию, в которой транспортное средство 1 должно останавливаться, в качестве цели позиции. Следовательно, во время t51, целевая позиция не определена, и в силу этого целевое замедление D_target задается в соответствии с запрашиваемым водителем критерием. В частности, во время t51, водитель не нажимает педаль 112 тормоза. Следовательно, последнее запрашиваемое системой замедление Ds, вычисленное посредством модуля 122 вычисления замедления (т.е. запрашиваемое системой замедление Ds_current), задается в качестве целевого замедления D_target.
После этого, во время t52, водитель начинает операцию нажатия педали 112 тормоза. Как результат, запрашиваемое системой замедление Ds во время t52 сохраняется в качестве запрашиваемого системой замедления Ds_start в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза. Как результат, после времени t52, сумма последнего запрашиваемого водителем замедления Dd, вычисленного посредством модуля 123 вычисления замедления (т.е. запрашиваемого водителем замедления Dd_current), и сохраненного запрашиваемого системой замедления Ds_start задается в качестве целевого замедления D_target.
После этого, во время t53, модуль 121 распознавания изображений распознает стоп-линию в качестве цели позиции. В силу этого, во время t53, целевая позиция определяется. Следовательно, после времени t53, целевое замедление D_target задается в соответствии с приоритетным для системы критерием. В частности, во время t53, целевое замедление D_target уже задано в соответствии с приоритетным для водителя критерием, и запрашиваемое системой замедление Ds_start в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза, сохранено. Следовательно, после времени t53, значение большего из суммы последнего запрашиваемого водителем замедления Dd, вычисленного посредством модуля 123 вычисления замедления (т.е. запрашиваемого водителем замедления Dd_current), и сохраненного запрашиваемого системой замедления Ds_start и последнего запрашиваемого системой замедления Ds, вычисленного посредством модуля 122 вычисления замедления (т.е. запрашиваемого системой замедления Ds_current), задается в качестве целевого замедления D_target. В частности, в период от времени t53 до времени t54, сумма запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_start превышает запрашиваемое системой замедление Ds_current. Следовательно, сумма запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_start задается в качестве целевого замедления D_target. После времени t54, сумма запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_start меньше запрашиваемого системой замедления Ds_current. Следовательно, запрашиваемое системой замедление Ds_current задается в качестве целевого замедления D_target.
Как результат, во время t55, транспортное средство 1 достигает стоп-линии и останавливается.
Техническое преимущество
Как описано выше, в варианте осуществления, ECU 12 может переключать способ задания для целевого замедления D_target, на основе результата определения того, распознается или нет цель позиции, указывающая позицию, в которой замедление транспортного средства 1 должно завершаться (т.е. того, может или нет определяться целевая позиция, в которой замедление транспортного средства 1 должно завершаться). Следовательно, ECU 12 может надлежащим образом выполнять помощь при замедлении, за счет которой транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, при взаимодействии с операцией нажатия педали 112 тормоза водителем.
В частности, когда целевая позиция не может определяться, имеется относительно более высокая вероятность того, что позиция, в которой замедление транспортного средства 1 фактически завершается, отклоняется от надлежащей целевой позиции вследствие активного вмешательства в вождение транспортного средства 1 посредством помощи при замедлении, по сравнению с тем, когда целевая позиция может определяться. С другой стороны, даже когда целевая позиция не может определяться, имеется относительно более низкая вероятность того, что позиция, в которой замедление транспортного средства 1 фактически завершается, отклоняется от надлежащей целевой позиции, если водитель надлежащим образом нажимает педаль 112 тормоза. Следовательно, когда целевая позиция не может определяться, предпочтительно, чтобы операция нажатия педали 112 тормоза водителем имела приоритет относительно активного вмешательства в вождение транспортного средства 1 посредством помощи при замедлении. Следовательно, в варианте осуществления, когда целевая позиция не может определяться, целевое замедление D_target задается в соответствии с приоритетным для водителя критерием. Как результат, по существу, транспортное средство 1 замедляется с целевым замедлением D_target, которое изменяется в зависимости от запрашиваемого водителем замедления Dd_current. Как следствие, даже когда целевая позиция не может определяться, транспортное средство 1 может двигаться таким образом, что транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, главным образом посредством операции нажатия педали 112 тормоза водителем.
С другой стороны, когда целевая позиция может определяться, имеется относительно более низкая вероятность того, что позиция, в которой замедление транспортного средства 1 фактически завершается, отклоняется от надлежащей целевой позиции вследствие активного вмешательства в вождение транспортного средства 1 посредством помощи при замедлении. Следовательно, когда целевая позиция может определяться, активное вмешательство в вождение транспортного средства 1 посредством помощи при замедлении может иметь приоритет относительно операции нажатия педали 112 тормоза водителем. Следовательно, в варианте осуществления, когда целевая позиция может определяться, целевое замедление D_target задается в соответствии с приоритетным для системы критерием. Как результат, в принципе, транспортное средство 1 замедляется с целевым замедлением D_target, которое изменяется в зависимости от запрашиваемого системой замедления Ds_current. Как следствие, под управлением посредством ECU 12, транспортное средство 1 может двигаться таким образом, что транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции.
Тем не менее, даже когда целевое замедление D_target задается в соответствии с приоритетным для системы критерием, оценивается то, что водитель намеревается замедлять транспортное средство 1 с большим замедлением, чем запрашиваемое системой замедление Ds_current, когда запрашиваемое системой замедление Ds_current меньше запрашиваемого водителем замедления Dd_current (или суммы запрашиваемого водителем замедления Dd_current и запрашиваемого системой замедления Ds_start). Следовательно, в этом случае, целевое замедление D_target, которое изменяется в зависимости от запрашиваемого водителем замедления Dd_current, задается. Даже в этом случае, замедление транспортного средства 1 завершается до того, как транспортное средство 1 достигает целевой позиции, поскольку целевое замедление D_target превышает запрашиваемое системой замедление Ds_current, необходимое для того, чтобы замедлять транспортное средство 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции.
Кроме того, в варианте осуществления, в случае, если целевое замедление D_target задается в соответствии с приоритетным для водителя критерием, целевое замедление D_target задается также с учетом запрашиваемого системой замедления Ds_start в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза. Как результат, даже в случае, если транспортное средство 1 уже замедляется посредством помощи при замедлении в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза, транспортное средство 1 может плавно замедляться. В частности, в случае, если транспортное средство 1 уже замедляется посредством помощи при замедлении до того, как водитель начинает операцию нажатия педали 112 тормоза, целевое замедление D_target, как предполагается, совпадает с запрашиваемым системой замедлением Ds_current. В этой ситуации, когда целевое замедление D_target переключается с запрашиваемого системой замедления Ds_current на запрашиваемое водителем замедление Dd_current одновременно с началом работы педали 112 тормоза, имеется вероятность того, что целевое замедление D_target прерывисто изменяется. Следовательно, например, имеется вероятность того, что замедление транспортного средства 1 резко падает на величину, эквивалентную замедлению, сформированному вследствие помощи при замедлении. Как результат, имеется вероятность того, что водитель ощущает недостаточность замедления и т.п. (т.е. водитель имеет некомфортное ощущение). Тем не менее, в варианте осуществления, целевое замедление D_target переключается с запрашиваемого системой замедления Ds_current на сумму запрашиваемого системой замедления Ds_current до этого времени (т.е. запрашиваемого системой замедления Ds_start) и запрашиваемого водителем замедления Dd_current, одновременно с началом работы педали 112 тормоза. Следовательно, как видно около времени t52 на фиг. 5, целевое замедление D_target может непрерывно изменяться. Соответственно, водитель не имеет некомфортного ощущения.
Также в случае, если целевое замедление D_target задается в соответствии с приоритетным для системы критерием, целевое замедление D_target задается с учетом запрашиваемого системой замедления Ds_start. Причина является идентичной причине в случае, если целевое замедление D_target задается в соответствии с приоритетным для водителя критерием.
Модификации
Далее описываются модификации помощи при замедлении.
Первая модификация помощи при замедлении
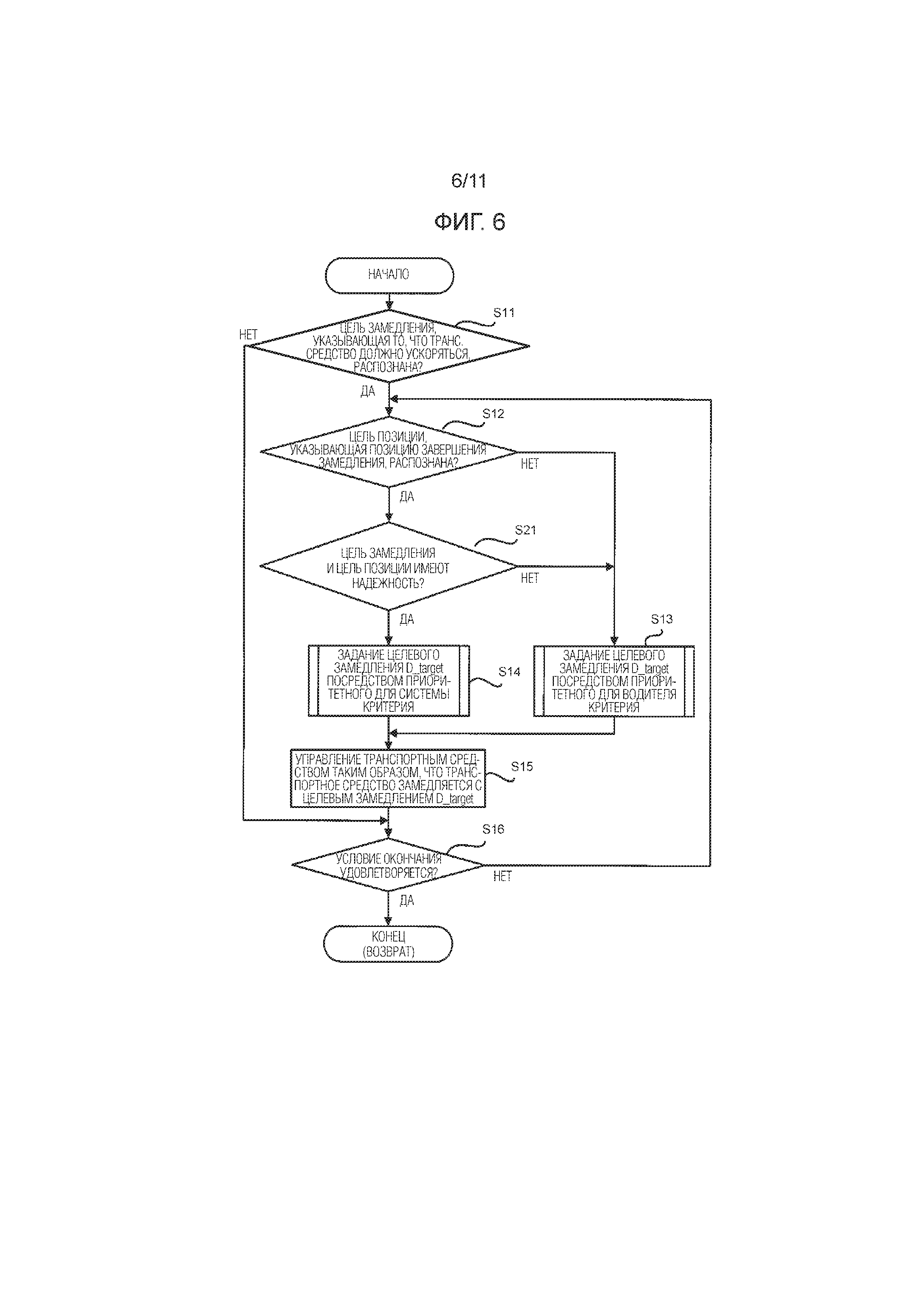
В первой модификации, ECU 12 переключает способ задания для целевого замедления Ds_target, на основе результата определения того, имеет или нет цель замедления, распознанная посредством модуля 121 распознавания изображений, надежность относительно того, что цель замедления безусловно указывает то, что транспортное средство 1 должно замедляться, и результата определения того, имеет или нет цель позиции, распознанная посредством модуля 121 распознавания изображений, надежность относительно того, что цель позиции надлежащим образом указывает позицию, в которой замедление транспортного средства 1 должно завершаться, в дополнение к результату определения того, может или нет определяться целевая позиция. После этого описывается первая модификация, в которой ECU 12 переключает способ задания для целевого замедления Ds_target на основе результата определения того, имеют или нет цель замедления и цель позиции надежность, со ссылкой на фиг. 6. Фиг. 6 является блок-схемой последовательности операций способа, показывающей последовательность операций первой модификации помощи при замедлении. Здесь, идентичные номера этапов назначаются процессам, идентичным процессам, описанным со ссылкой на фиг. 2, и подробное описание опускается.
Как показано на фиг. 6, первая модификация помощи при замедлении отличается от помощи при замедлении, описанной выше со ссылкой на фиг. 2, в том, что модуль 124 регулирования определяет то, имеют или нет цель замедления и цель позиции надежность (этап S21), после того, как модуль 124 регулирования определяет то, что модуль 121 распознавания изображений распознает цель позиции (этап S12: "Да"). Кроме того, первая модификация помощи при замедлении отличается от помощи при замедлении, описанной выше со ссылкой на фиг. 2, в том, что целевое замедление D_target задается в соответствии с приоритетным для водителя критерием (этап S13) в случае, если, по меньшей мере, одна из цели замедления и цели позиции не имеет надежности (этап S21: "Нет"), даже когда цель позиции распознается. С другой стороны, в первой модификации, в случае, если обе из цели замедления и цели позиции имеют надежность (этап S21: "Да"), целевое замедление D_target, как обычно, задается в соответствии с приоритетным для системы критерием (этап S14).
Модуль 124 регулирования определяет то, имеет или нет цель замедления надежность, на основе результата распознавания модуля 121 распознавания изображений. В частности, когда модуль 121 распознавания изображений распознает цель замедления, модуль 121 распознавания изображений распознает не только цель замедления, но также и ситуацию вокруг цели замедления и ситуацию вокруг транспортного средства 1. Примеры ситуации вокруг цели замедления включают в себя знак и т.п., присоединенный к цели замедления (например, световой сигнал со стрелкой, присоединенный к светофору), и позицию задания цели замедления. Примеры ситуации вокруг транспортного средства 1 включают в себя полосу движения, в которой движется транспортное средство 1. Как результат, в случае удовлетворения такого первого условия ненадежности, что возникает явное сомнение относительно того, указывает или нет цель замедления, распознанная посредством модуля 121 распознавания изображений, безусловно то, что транспортное средство 1, оснащенное модулем 121 распознавания изображений, должно замедляться, модуль 124 регулирования определяет то, что цель замедления не имеет надежности. С другой стороны, в случае удовлетворения такого первого условия надежности, что имеется достаточная достоверность (или не возникает явного сомнения) в отношении того, безусловно указывает или нет цель замедления, распознанная посредством модуля 121 распознавания изображений, то, что транспортное средство 1, оснащенное модулем 121 распознавания изображений, должно замедляться, модуль 124 регулирования определяет то, что цель замедления имеет надежность. Альтернативно, в случае, если первое условие ненадежности не удовлетворяется, модуль 124 регулирования может определять то, что цель замедления имеет надежность.
Для цели позиции, аналогично, модуль 124 регулирования определяет то, имеет или нет цель позиции надежность, на основе результата распознавания модуля 121 распознавания изображений. Как результат, в случае удовлетворения такого второго условия ненадежности, что возникает явное сомнение относительно того, указывает или нет цель позиции, распознанная посредством модуля 121 распознавания изображений надлежащим образом, позицию, в которой замедление транспортного средства 1, оснащенного модулем 121 распознавания изображений, завершается, модуль 124 регулирования определяет то, что цель позиции не имеет надежности. С другой стороны, в случае удовлетворения такого второго условия надежности, что имеется достаточная достоверность (или не возникает явного сомнения) в отношении того, указывает или нет цель позиции, распознанная посредством модуля 121 распознавания изображений надлежащим образом, позицию, в которой замедление транспортного средства 1, оснащенного модулем 121 распознавания изображений, завершается, модуль 124 регулирования определяет то, что цель позиции имеет надежность. Альтернативно, в случае, если второе условие ненадежности не удовлетворяется, модуль 124 регулирования может определять то, что цель позиции имеет надежность.
Первое условие ненадежности может включать в себя такое условие, что точность распознавания модуля 121 распознавания изображений для цели замедления является относительно более низкой. Например, что касается стоп-линии, которая представляет собой пример цели замедления, многие транспортные средства наезжают на стоп-линию, и, соответственно, имеется вероятность того, что часть стоп-линии исчезает (т.е. стоп-линия стерта). В этом случае, имеется вероятность того, что точность распознавания модуля 121 распознавания изображений для стоп-линии является относительно более низкой, хотя стоп-линия содержится в изображении, сфотографированном посредством камеры 111. Дополнительно, сложнее распознавать, в изображении, дорожный знак в позиции, удаленной от транспортного средства 1, чем дорожный знак в позиции, близкой к транспортному средству 1. В этом случае, имеется вероятность того, что точность распознавания модуля 121 распознавания изображений для дорожного знака является относительно более низкой, хотя дорожный знак содержится в изображении, сфотографированном посредством камеры 111. В этих случаях, поскольку точность распознавания для цели замедления является относительно более низкой, модуль 124 регулирования может определять то, что цель замедления не имеет надежности. Для цели позиции, аналогично, второе условие ненадежности может включать в себя такое условие, что точность распознавания модуля 121 распознавания изображений для цели позиции является относительно более низкой.
Первое условие ненадежности может включать в себя такое условие, что цель замедления, распознанная посредством модуля 121 распознавания изображений, не указывает то, что транспортное средство 1 должно замедляться (другими словами, цель замедления, распознанная посредством модуля 121 распознавания изображений, указывает то, что другое транспортное средство, отличающееся от транспортного средства 1, должно замедляться), с учетом ситуации вокруг цели замедления и ситуации вокруг транспортного средства 1. Например, в случае, если модуль 121 распознавания изображений распознает светофор, установленный на перекрестке, который имеет сложную форму (например, на перекрестке, на котором две дороги пересекаются под острым углом), имеется вероятность того, что невозможно определять то, представляет светофор собой светофор для выдачи инструкции разрешения на продвижение вперед и остановки в отношении дороги, по которой движется транспортное средство 1, или светофор для выдачи инструкции разрешения на продвижение вперед и остановки в отношении другой дороги, пересекающей дорогу, по которой движется транспортное средство 1, только из результата распознавания модуля 121 распознавания изображений. В этом случае, имеется вероятность того, что цель замедления, распознанная посредством модуля 121 распознавания изображений, не указывает то, что транспортное средство 1 должно замедляться. Дополнительно, светофор в качестве цели замедления иногда включает в себя световой сигнал со стрелкой для разрешения продвижения вперед только транспортных средств, которые движутся в фиксированном направлении. В этом случае, светофор указывает то, что транспортное средство 1 должно замедляться только в случае удовлетворения такого условия, что сигнал со стрелкой, разрешающий транспортному средству 1 продвигаться вперед в намеченном направлении продвижения вперед, не отображается, в дополнение к такому условию, что цвет света светофора является красным. Между тем, намеченное направление продвижения вперед транспортного средства 1 может указываться из дорожной метки, указывающей направление продвижения вперед транспортного средства, которое движется в полосе движения (например, дорожной метки, указывающей направление продвижения вперед в качестве стрелки). Кроме того, такая дорожная метка является информацией, указывающей ситуацию вокруг транспортного средства 1, и может распознаваться посредством модуля 121 распознавания изображений. Тем не менее, имеется полоса движения, в которой разрешается движение во множестве различных направлений продвижения вперед. Дополнительно, имеется полоса движения, в которой не нарисована дорожная метка в отношении направлении продвижения вперед, или в которой стерта дорожная метка. В этом случае, имеется вероятность того, что намеченное направление продвижения вперед транспортного средства 1 не может однозначно указываться. Дополнительно, с учетом того, что транспортное средство 1 может изменять полосу движения в то время, когда транспортное средство 1 приближается к перекрестку, имеется вероятность того, что намеченное направление продвижения вперед транспортного средства 1 не может однозначно указываться, даже когда транспортное средство 1 находится на некотором расстоянии от перекрестка. Как результат, имеется вероятность того, что невозможно определять то, представляет светофор, распознанный посредством модуля 121 распознавания изображений, собой светофор, указывающий то, что транспортное средство 1 должно замедляться, или светофор, указывающий то, что другое транспортное средство, отличающееся от транспортного средства 1, должно замедляться, только из результата распознавания модуля 121 распознавания изображений. В этих случаях, поскольку имеется вероятность того, что цель замедления, распознанная посредством модуля 121 распознавания изображений, не указывает то, что транспортное средство 1 должно замедляться, модуль 124 регулирования может определять то, что цель замедления не имеет надежности. Для цели позиции, аналогично, второе условие ненадежности может включать в себя такое условие, что цель позиции, распознанная посредством модуля 121 распознавания изображений, надлежащим образом не указывает позицию, в которой замедление транспортного средства 1 завершается (другими словами, цель позиции, распознанная посредством модуля 121 распознавания изображений, указывает позицию, в которой замедление другого транспортного средства, отличающегося от транспортного средства 1, завершается), с учетом ситуации вокруг цели позиции и ситуации вокруг транспортного средства 1.
В случае, если транспортное средство 1, в дополнение к камере 111, включает в себя другой детектор, который может обнаруживать ситуацию впереди (в направлении продвижения вперед) транспортного средства 1 (в частности, детектор, который отличается по типу от камеры 111, например, радар или лидар), первое условие ненадежности может включать в себя такое условие, что модуль 121 распознавания изображений может распознавать цель замедления из одного из результата захвата камеры 111 и результата обнаружения детектора, но не может распознавать цель замедления из другого из результата захвата камеры 111 и результата обнаружения детектора. То же самое касается цели позиции.
В случае, если цель замедления представляет собой едущее впереди транспортное средство, первое условие ненадежности может включать в себя такое условие, что едущее впереди транспортное средство перемещается. Таким образом, в случае, если цель замедления представляет собой едущее впереди транспортное средство, первое условие надежности может включать в себя такое условие, что едущее впереди транспортное средство находится в остановленном состоянии. То же самое касается цели позиции.
В вышеописанной первой модификации, ECU 12 может более надлежащим образом выполнять помощь при замедлении, за счет которой транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, при взаимодействии с операцией нажатия педали 112 тормоза водителем. В частности, когда, по меньшей мере, одна из цели замедления и цели позиции не имеет надежности, имеется более высокая вероятность того, что целевая позиция, которая предположительно должна определяться на основе цели позиции, отклоняется от надлежащей целевой позиции, по сравнению с тем, когда обе из цели замедления и цели позиции имеют надежность. Как результат, имеется относительно более высокая вероятность того, что позиция, в которой замедление транспортного средства 1 фактически завершается, отклоняется от надлежащей целевой позиции вследствие активного вмешательства в вождение транспортного средства 1 посредством помощи при замедлении. С другой стороны, даже когда, по меньшей мере, одна из цели замедления и цели позиции не имеет надежности, имеется относительно более низкая вероятность того, что позиция, в которой замедление транспортного средства 1 фактически завершается, отклоняется от надлежащей целевой позиции, если водитель надлежащим образом нажимает педаль 112 тормоза. Следовательно, когда, по меньшей мере, одна из цели замедления и цели позиции не имеет надежности, предпочтительно, чтобы операция нажатия педали 112 тормоза водителем имела приоритет относительно активного вмешательства в вождение транспортного средства 1 посредством помощи при замедлении, даже когда целевая позиция может определяться. Следовательно, в первой модификации, когда, по меньшей мере, одна из цели замедления и цели позиции не имеет надежности, целевое замедление D_target задается в соответствии с приоритетным для водителя критерием. Как следствие, даже когда, по меньшей мере, одна из цели замедления и цели позиции не имеет надежности, транспортное средство 1 может двигаться таким образом, что транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, главным образом посредством операции нажатия педали 112 тормоза водителем.
Вторая модификация
Во второй модификации, ECU 12 переключает способ задания для целевого замедления Ds_target, на основе результата определения того, возникает или нет, по меньшей мере, одно из задержки и недостаточности операции нажатия педали 112 тормоза водителем (в дальнейшем в этом документе называемое "задержкой в нажатии педали тормоза или недостаточностью нажатия педали тормоза" при необходимости), в дополнение к результату определения того, может или нет определяться целевая позиция. Задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза означает то, что имеется задержка или недостаточность содержимого операции нажатия педали 112 тормоза водителем относительно содержимого операции нажатия педали 112 тормоза, необходимой для того, чтобы замедлять транспортное средство 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции. После этого описывается вторая модификация, в которой ECU 12 переключает способ задания для целевого замедления Ds_target на основе результата определения того, возникает либо нет задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза, со ссылкой на фиг. 7. Фиг. 7 является блок-схемой последовательности операций способа, показывающей последовательность операций второй модификации помощи при замедлении. Здесь, идентичные номера этапов назначаются процессам, идентичным процессам, описанным со ссылкой на фиг. 2, и подробное описание опускается.
Как показано на фиг. 7, вторая модификация помощи при замедлении отличается от помощи при замедлении, описанной выше со ссылкой на фиг. 2, в том, что модуль 124 регулирования определяет то, возникает либо нет задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза (этап S31) после того, как модуль 124 регулирования определяет то, что модуль 121 распознавания изображений распознает цель позиции (этап S12: "Да"). Кроме того, вторая модификация помощи при замедлении отличается от помощи при замедлении, описанной выше со ссылкой на фиг. 2, в том, что целевое замедление D_target задается в соответствии с приоритетным для водителя критерием (этап S13) в случае, если модуль 124 регулирования определяет то, что задержка в нажатии педали тормоза и недостаточность нажатия педали тормоза не возникают (этап S31: "Нет"), даже когда цель позиции распознается. С другой стороны, во второй модификации, в случае, если модуль 124 регулирования определяет то, что задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза возникает (этап S31: "Да"), целевое замедление D_target, как обычно, задается в соответствии с приоритетным для системы критерием (этап S14).
Модуль 124 регулирования определяет то, что задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза возникает, в случае, если необходимо обеспечивать относительно более высокую тормозную мощность (в частности, более высокую тормозную мощность, чем предварительно определенное пороговое значение торможения) для транспортного средства 1 для замедления транспортного средства 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции. Ниже описываются примеры процесса определения на этапе S31.
Модуль 124 регулирования может определять то, возникает либо нет задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза, на основе абсолютной величины запрашиваемого системой замедления Ds_current. В этом случае, как показано на фиг. 8, модуль 124 регулирования получает текущее запрашиваемое системой замедление Ds_current из модуля 122 вычисления замедления (этап S311). После этого, модуль 124 регулирования определяет то, превышает или нет запрашиваемое системой замедление Ds_current, полученное на этапе S311, предварительно определенное пороговое значение TH1 (этап S312). Предварительно определенное пороговое значение TH1 задается для различения, из замедления, между состоянием, в котором необходимо обеспечивать относительно более высокую тормозную мощность для транспортного средства 1 для замедления транспортного средства 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, и состоянием, в котором необходимо обеспечивать только относительно более низкую тормозную мощность для транспортного средства 1 для замедления транспортного средства 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции. Типично, предварительно определенное пороговое значение TH1 представляет собой замедление, которое формируется в транспортном средстве 1, когда тормозная мощность, соответствующая вышеуказанному пороговому значению торможения, предоставляется для транспортного средства 1. В случае, если модуль 124 регулирования определяет то, что запрашиваемое системой замедление Ds_current превышает предварительно определенное пороговое значение TH1, в качестве результата определения на этапе S312 (этап S312: "Да"), оценивается то, что относительно более высокая тормозная мощность должна предоставляться для транспортного средства 1 для замедления транспортного средства 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции. Следовательно, в этом случае, модуль 124 регулирования определяет то, что задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза возникает (этап S313). С другой стороны, в случае, если запрашиваемое системой замедление Ds_current не превышает предварительно определенное пороговое значение TH1, в качестве результата определения на этапе S312 (этап S312: "Нет"), оценивается то, что относительно более высокая тормозная мощность не должна предоставляться для транспортного средства 1 для замедления транспортного средства 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции. Следовательно, в этом случае, модуль 124 регулирования определяет то, что задержка в нажатии педали тормоза и недостаточность нажатия педали тормоза не возникают (этап S314).
Дополнительно, альтернативный параметр, отличающийся от замедления, также обеспечивает возможность различия между состоянием, в котором необходимо обеспечивать относительно более высокую тормозную мощность для транспортного средства 1 для замедления транспортного средства 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, и состоянием, в котором необходимо обеспечивать только относительно более низкую тормозную мощность для транспортного средства 1 для замедления транспортного средства 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции. В этом случае, вместо запрашиваемого системой замедления Ds_current, модуль 124 регулирования может определять то, превышает или нет альтернативный параметр предварительно определенное пороговое значение TH2. Примеры альтернативного параметра включают в себя время, требуемое для транспортного средства 1, чтобы достигать целевой позиции. В случае, если цель замедления представляет собой едущее впереди транспортное средство, время является эквивалентным так называемому времени до столкновения (TTC).
Альтернативно, модуль 124 регулирования может определять то, возникает либо нет задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза, на основе сравнения между содержимым операции нажатия педали 112 тормоза среднестатистическим водителем и фактическим содержимым операции нажатия педали 112 тормоза водителем. В этом случае, как показано на фиг. 9, модуль 124 регулирования получает скорость транспортного средства для транспортного средства 1 из непроиллюстрированного датчика скорости (этап S315). Кроме того, модуль 124 регулирования получает расстояние от транспортного средства 1 до целевой позиции (этап S316). После этого, модуль 124 регулирования определяет то, находится или нет состояние торможения транспортного средства 1, указываемое из скорости транспортного средства, полученной на этапе S315, и расстояния, полученного на этапе S316, в пределах области задержки и недостаточности, в которой оценивается то, что задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза возникает на карте определения (см. фиг. 10), указываемой из профиля замедления, который задает взаимосвязь между скоростью транспортного средства и расстоянием до целевой позиции, когда среднестатистический водитель нажимает педаль 112 тормоза, с тем чтобы замедлять транспортное средство 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции (этап S317). В случае, если модуль 124 регулирования определяет то, что состояние торможения транспортного средства 1 находится в пределах области задержки и недостаточности, в качестве результата определения на этапе S317 (этап S317: "Да"), модуль 124 регулирования определяет то, что задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза возникает (этап S313). С другой стороны, в случае, если модуль 124 регулирования определяет то, что состояние торможения транспортного средства 1 не находится в пределах области задержки и недостаточности, в качестве результата определения на этапе S312 (этап S312: "Нет"), модуль 124 регулирования определяет то, что задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза не возникает (этап S314).
Как показано на фиг. 10, карта определения является картой, на которой скорость транспортного средства для транспортного средства 1 задается в качестве оси ординат, а расстояние до целевой позиции задается в качестве оси абсцисс. Кроме того, фиг. 10 показывает профиль замедления (стандартный), указывающий взаимосвязь между скоростью транспортного средства и расстоянием, когда среднестатистический водитель нажимает педаль 112 тормоза, с тем чтобы замедлять транспортное средство 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции на карте определения. Кроме того, фиг. 10 показывает профиль замедления (задержка, недостаточность), указывающий взаимосвязь между скоростью транспортного средства и расстоянием, когда водитель нажимает педаль 112 тормоза, с тем чтобы обеспечивать относительно более высокую тормозную мощность для транспортного средства 1 для замедления транспортного средства 1 до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, поскольку задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза возникает на карте определения. Область задержки и недостаточности соответствует области на карте определения, в которой задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза еще больше задержки или недостаточности в профиле замедления (задержка, недостаточность). Например, в случае, если скорость транспортного средства, полученная на этапе S315, составляет V1, и расстояние, полученное на этапе S316, составляет D1 в примере, показанном на фиг. 10, модуль 124 регулирования определяет то, что не возникают задержка в нажатии педали тормоза и недостаточность нажатия педали тормоза. С другой стороны, например, в случае, если скорость транспортного средства, полученная на этапе S315, составляет V2 (V2>V1), и расстояние, полученное на этапе S316, составляет D1 в примере, показанном на фиг. 10, модуль 124 регулирования определяет то, что возникает задержка в нажатии педали тормоза или недостаточность нажатия педали тормоза.
В вышеописанной второй модификации, ECU 12 может более надлежащим образом выполнять помощь при замедлении, за счет которой транспортное средство 1 замедляется до целевой скорости до того, как транспортное средство 1 достигает целевой позиции, при взаимодействии с операцией нажатия педали 112 тормоза водителем. В частности, когда задержка в нажатии педали тормоза и недостаточность нажатия педали тормоза не возникают, предполагается, что транспортное средство 1 может замедляться до целевой скорости до того, как транспортное средство 1 достигает целевой позиции посредством операции нажатия педали 112 тормоза водителем без активного вмешательства в вождение транспортного средства 1 посредством помощи при замедлении. Следовательно, когда задержка в нажатии педали тормоза и недостаточность нажатия педали тормоза не возникают, операция нажатия педали 112 тормоза водителем может иметь приоритет относительно активного вмешательства в вождение транспортного средства 1 посредством помощи при замедлении. Следовательно, во второй модификации, когда задержка в нажатии педали тормоза и недостаточность нажатия педали тормоза не возникают, целевое замедление D_target задается в соответствии с приоритетным для водителя критерием. Как результат, можно уменьшать возможности для активного вмешательства в вождение транспортного средства 1 посредством помощи при замедлении.
Также во второй модификации, модуль 124 регулирования может определять то, имеют или нет обе из цели замедления и цели позиции надежность, как описано в первой модификации. Таким образом, вторая модификация может комбинироваться с первой модификацией.
Другие модификации
В вышеприведенном описании, когда целевое замедление D_target задается в соответствии с приоритетным для водителя критерием, модуль 124 регулирования задает сумму запрашиваемого системой замедления Ds_start и запрашиваемого водителем замедления Dd_current в качестве целевого замедления D_target, в случае, если транспортное средство 1 уже замедляется посредством помощи при замедлении в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза. Тем не менее, в качестве целевого замедления D_target, модуль 124 регулирования может задавать сумму значения, получающегося в результате умножения запрашиваемого системой замедления Ds_start на первый весовой коэффициент w1, и значения, получающегося в результате умножения запрашиваемого водителем замедления Dd_current на второй весовой коэффициент w2. Кроме того, в этом случае, модуль 124 регулирования может регулировать, по меньшей мере, один из первого весового коэффициента w1 и второго весового коэффициента w2. Например, модуль 124 регулирования может регулировать первый весовой коэффициент w1 таким образом, что первый весовой коэффициент w1 постепенно снижается. В этом случае, как показано на фиг. 11, отношение долей компонента замедления на основе запрашиваемого системой замедления Ds_start к целевому замедлению D_target постепенно снижается. Как результат, можно задавать целевое замедление D_target при дополнительном предоставлении приоритета операции нажатия педали 112 тормоза водителем. Тем не менее, даже в этом случае, предпочтительно, чтобы целевое замедление D_target в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза, было суммой запрашиваемого системой замедления Ds_start и запрашиваемого водителем замедления Dd_current, для предотвращения прерывистого изменения целевого замедления D_target в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза. Таким образом, предпочтительно, чтобы, по меньшей мере, первый весовой коэффициент w1 составлял 1 в момент времени, когда водитель начинает операцию нажатия педали 112 тормоза водителем.
В вышеприведенном описании, цель замедления и цель позиции распознаются из изображения, показывающего ситуацию впереди транспортного средства 1, захваченную посредством камеры 111. Тем не менее, цель замедления и цель позиции могут распознаваться посредством другого способа. Например, цель замедления и цель позиции могут распознаваться из результата обнаружения радара или лидара.
Изобретение может надлежащим образом изменяться без отступления от сущности или идеи изобретения, которая может пониматься из всего из формулы изобретения и подробного описания, и устройства помощи при вождении с такими изменениями также включаются в техническую идею изобретения.
Реферат
Заявленная группа изобретений относится к устройству и способу помощи при вождении. Устройство, осуществляющее способ помощи при вождении, содержит: электронный модуль управления, выполненный с возможностью определять, может или нет целевая позиция определяться из предварительно определенного объекта для замедления транспортного средства. Электронный модуль управления выполнен с возможностью выполнять первую помощь, где транспортное средство замедляется с первым замедлением, которое изменяется на основе операции нажатия педали тормоза водителем, при определении того, что целевая позиция не может определяться. А также выполнять вторую помощь, за счет которой транспортное средство замедляется со вторым замедлением, которое равно или выше предварительно определенного замедления, необходимого для замедления транспортного средства до целевой скорости до того, как транспортное средство достигает целевой позиции, определенной из предварительно определенного объекта, при определении того, что целевая позиция может определяться. Обеспечивается помощь при замедлении транспортного средства до целевой скорости до того, как транспортное средство достигнет целевой позиции, при взаимодействии с операцией нажатия педали тормоза водителем. 2 н. и 7 з.п. ф-лы. 11 ил.
Формула
1. Устройство помощи при вождении, содержащее:
Документы, цитированные в отчёте о поиске
Устройство помощи при вождении и способ помощи при вождении
Устройство помощи при вождении
Комментарии