Устройство помощи при вождении - RU2567706C1
Код документа: RU2567706C1
Чертежи






Описание
Область техники, к которой относится изобретение
Изобретение относится к устройству помощи при вождении.
Уровень техники
Технология распознавания пешеходов известна в уровне техники. Патентный документ 1, например, раскрывает технологию, в которой, когда на входном изображении, снятом камерой для съемки в инфракрасном диапазоне, обнаруживается пешеход, выполняется управление замедлением для снижения скорости транспортного средства до заданной скорости с использованием операции торможения или тому подобного, и выполняется управление предупреждениями для выдачи уведомления относительно наличия пешехода с использованием индикатора, зуммера или речи из динамика.
Патентный документ 1. Публикация заявки на патент Японии № 2005-196590 (JP 2005-196590 A)
Раскрытие изобретения
В данном случае реакции на пешеходов варьируются в зависимости водителей, и, следовательно, когда помощь обеспечивается равномерно на основании информации, связанной с распознанным пешеходом, водитель может испытывать чувство дискомфорта. Желательно иметь возможность выполнять помощь при вождении в соответствии с ощущениями водителя, чтобы не допускать возникновения у водителя чувства дискомфорта.
Задача изобретения состоит в создании устройства помощи при вождении, которое может обеспечивать помощь при вождении при подавлении чувства дискомфорта, испытываемого водителем.
Устройство помощи при вождении согласно изобретению включает в себя множество возможных моделей, которые задают отношение соответствия между операцией вождения, выполняемой водителем, и информацией, указывающей относительные положения движущегося тела, обнаруженного на периферии транспортного средства-носителя устройства, и транспортного средства-носителя. Устройство помощи при вождении определяет модель, которая должна быть использована, из множества возможных моделей на основании информации, связанной с обнаруженным движущимся телом, и выполняет помощь при вождении на основании определенной модели и операции вождения, выполняемой водителем после обнаружения движущегося тела.
В устройстве помощи при вождении, описанном выше, определенная модель может быть предпочтительно обновлена на основании определенной модели и операции вождения, выполняемой водителем после обнаружения движущегося тела.
В устройстве помощи при вождении, описанном выше, совместимость между определенной моделью и операцией вождения, выполняемой водителем после обнаружения движущегося тела, предпочтительно вычисляется на основании заданного числа выборок для отношения соответствия между моделью и операцией вождения, и когда совместимость меньше заданного опорного значения, модель предпочтительно обновляется.
В устройстве помощи при вождении, описанном выше, определенная модель предпочтительно обновляется в соответствии как с кратковременной совместимостью, так и с долговременной совместимостью с операцией вождения, выполняемой водителем после обнаружения движущегося тела.
В устройстве помощи при вождении, описанном выше, помощь при вождении предпочтительно основана на степени отклонения между определенной моделью и операцией вождения, выполняемой водителем после обнаружения движущегося тела.
Устройство помощи при вождении согласно изобретению включает в себя множество возможных моделей, которые определяют отношение соответствия между операцией вождения, выполняемой водителем, и информацией, указывающей относительные положения движущегося тела, обнаруженного на периферии транспортного средства-носителя, и транспортного средства-носителя. Устройство помощи при вождении определяет модель, которая должна быть использована, из множества возможных моделей на основании информации, связанной с обнаруженным движущимся телом, и выполняет помощь при вождении на основании определенной модели и операции вождения, выполняемой водителем после обнаружения движущегося тела. Следовательно, при использовании устройства помощи при вождении согласно изобретению, помощь при вождении может обеспечиваться с подавлением чувства дискомфорта, испытываемого водителем.
Краткое описание чертежей
Фиг. 1 является блок-схемой, показывающей работу устройства помощи при вождении согласно варианту осуществления.
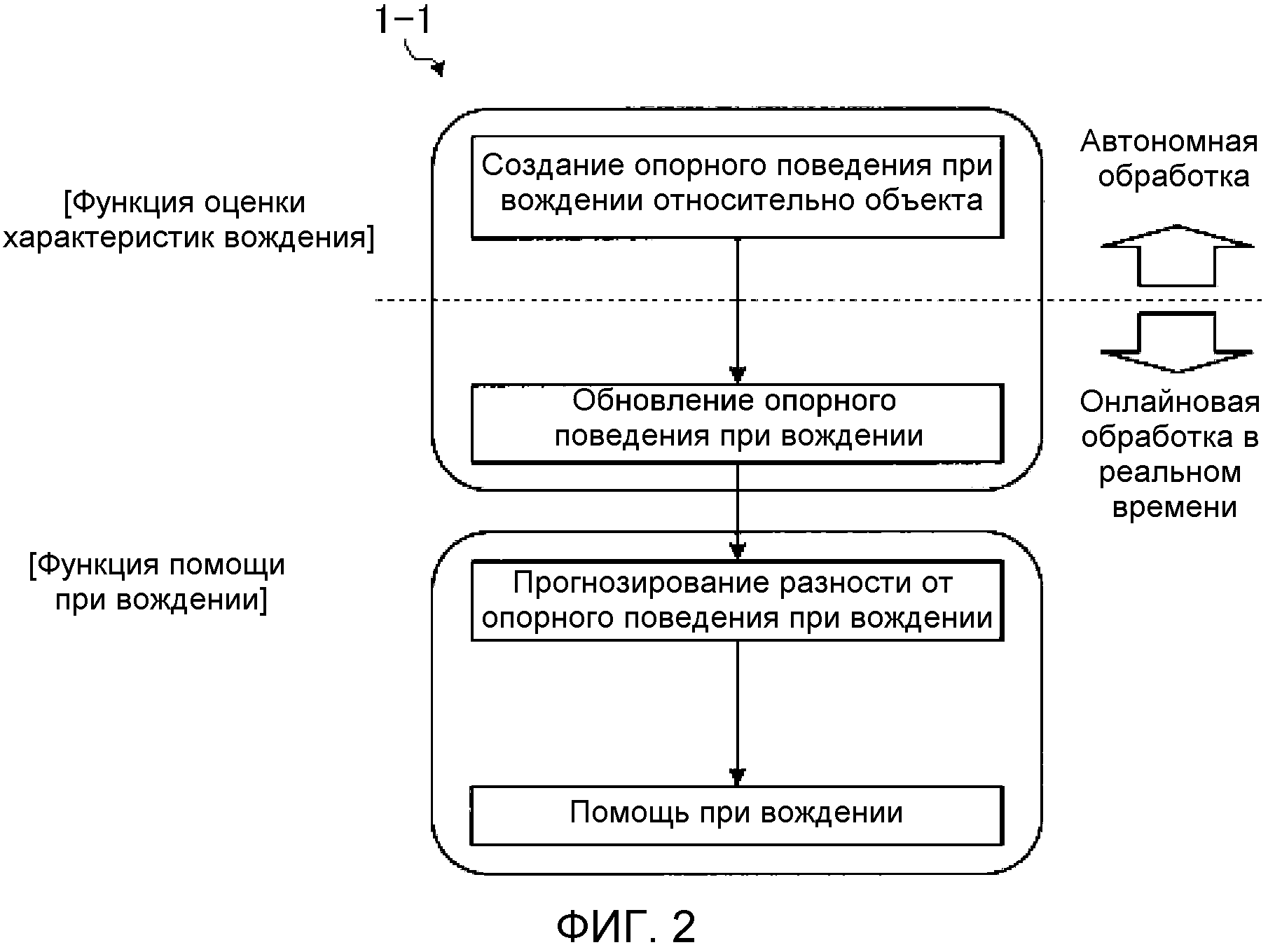
Фиг. 2 является видом, показывающим функции устройства помощи при вождении согласно этому варианту осуществления.
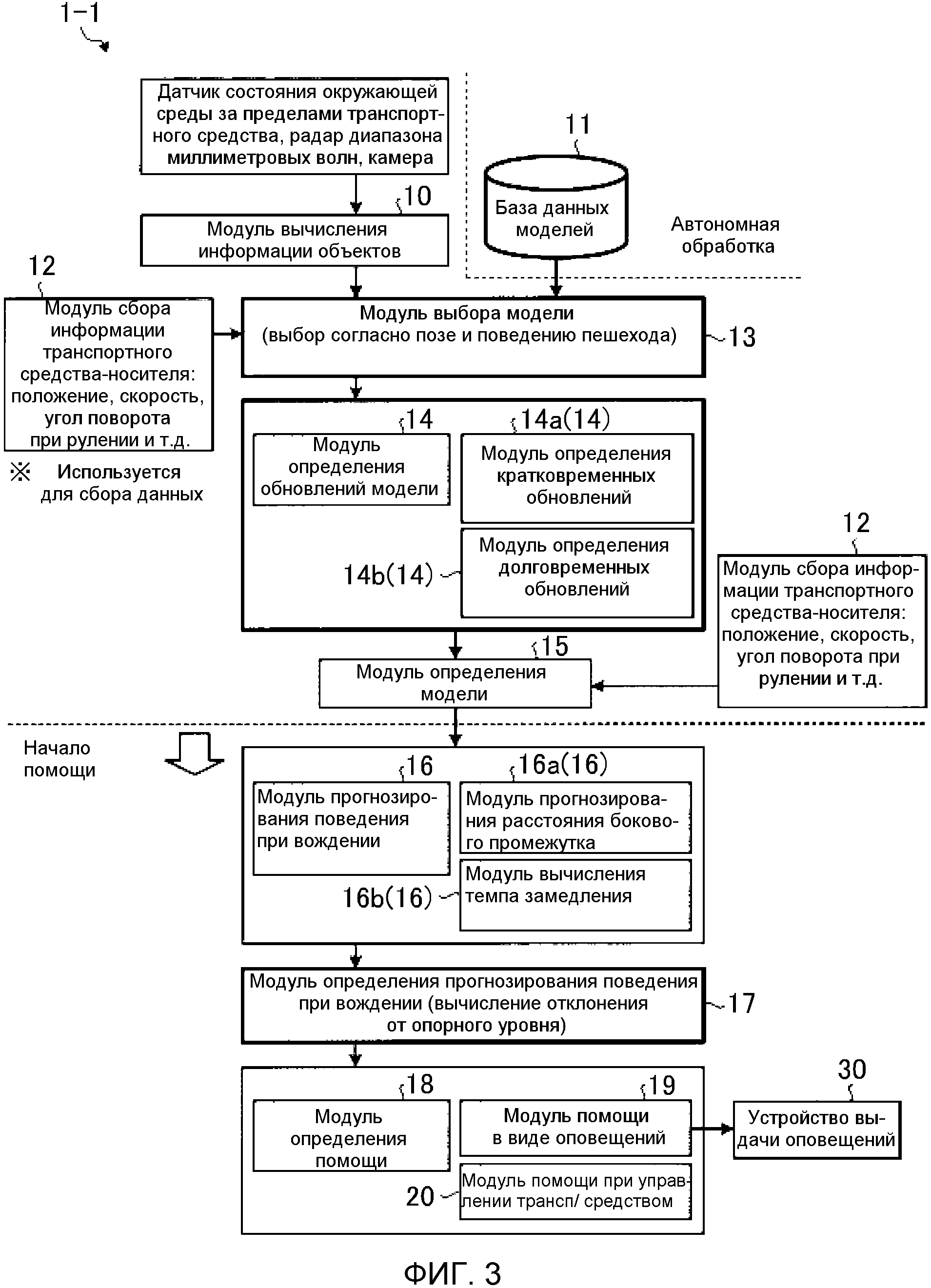
Фиг. 3 является блок-схемой, показывающей устройство помощи при вождении согласно этому варианту осуществления.
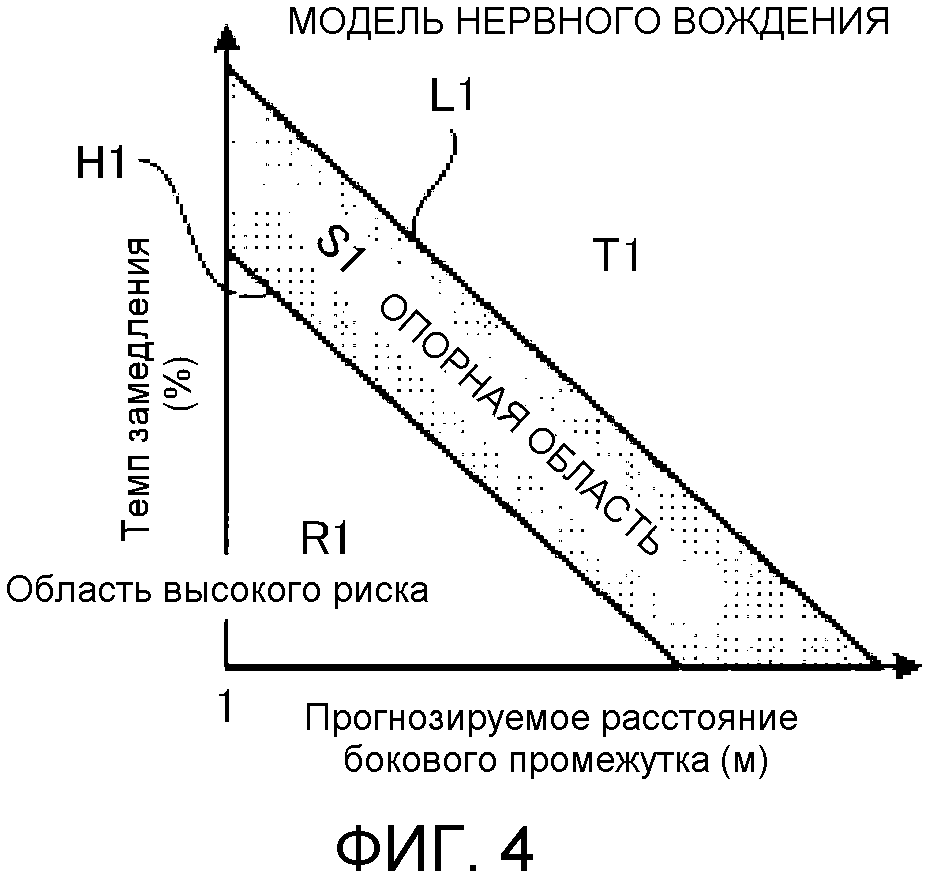
Фиг. 4 является видом, показывающим модель нервного вождения.
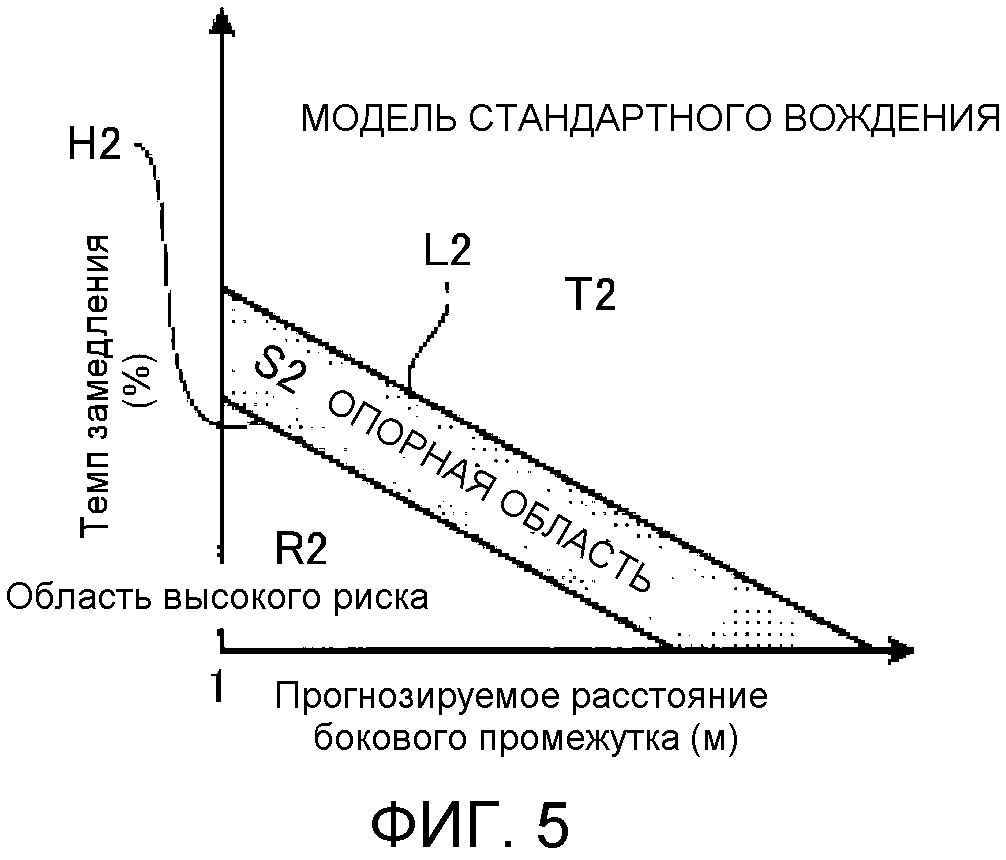
Фиг. 5 является видом, показывающим модель стандартного вождения.
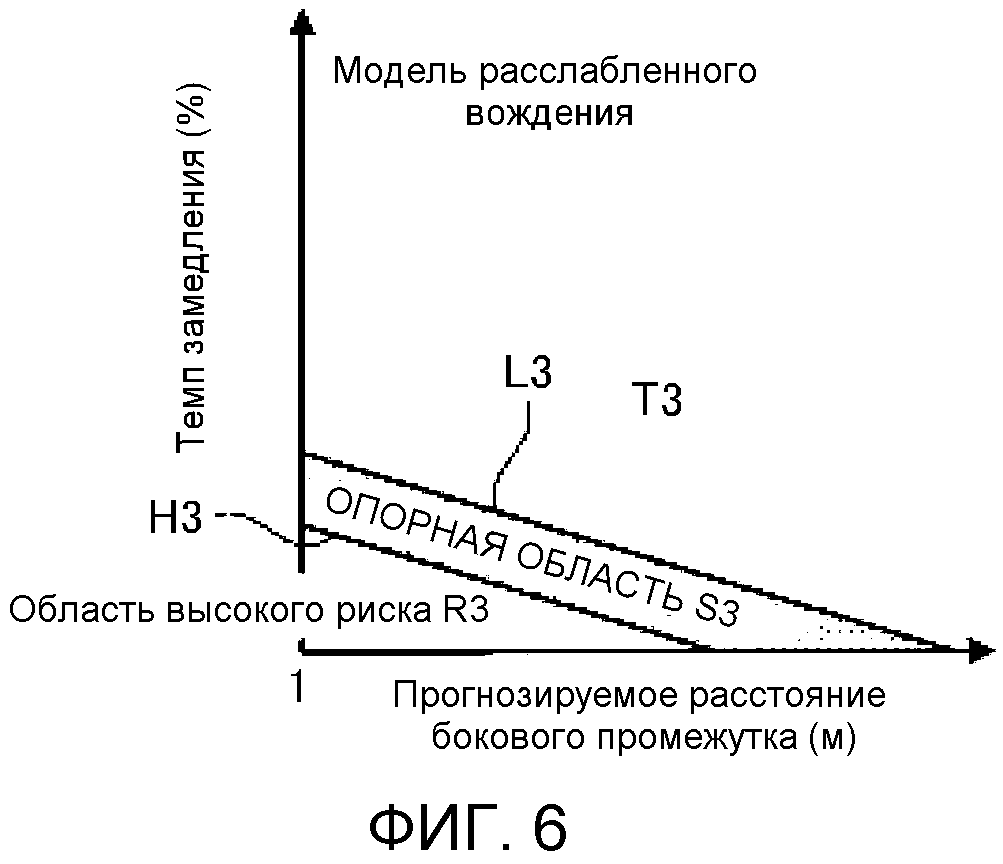
Фиг. 6 является видом, показывающим модель расслабленного вождения.
Фиг. 7 является видом, иллюстрирующим прогнозируемое расстояние бокового промежутка.
Фиг. 8 является видом, иллюстрирующим темп замедления.
Фиг. 9 является видом, показывающим рассматриваемую область скоростей транспортного средства.
Фиг. 10 является видом, показывающим пример дерева решений, связанного с выбором модели.
Фиг. 11 является блок-схемой последовательности операций способа, показывающей операцию обновления модели.
Фиг. 12 является видом, показывающим пример вычисления совместимости.
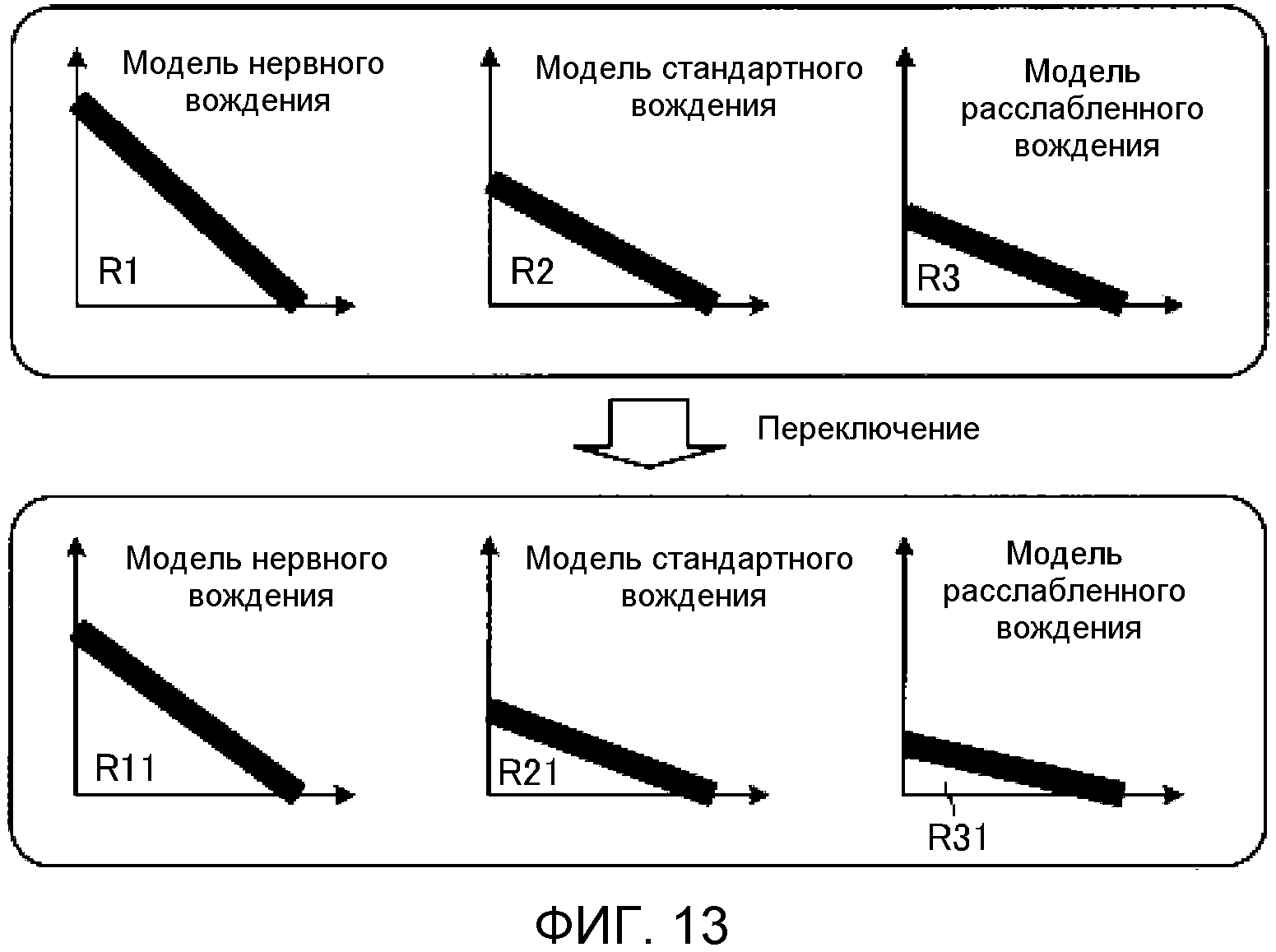
Фиг. 13 является видом, показывающим пример переключения модели, выполняемого посредством модуля определения обновлений модели.
Фиг. 14 является видом, иллюстрирующим распознавание отклонения и степени отклонения.
Фиг. 15 является видом, показывающим пример числа данных, требуемых для обновления модели.
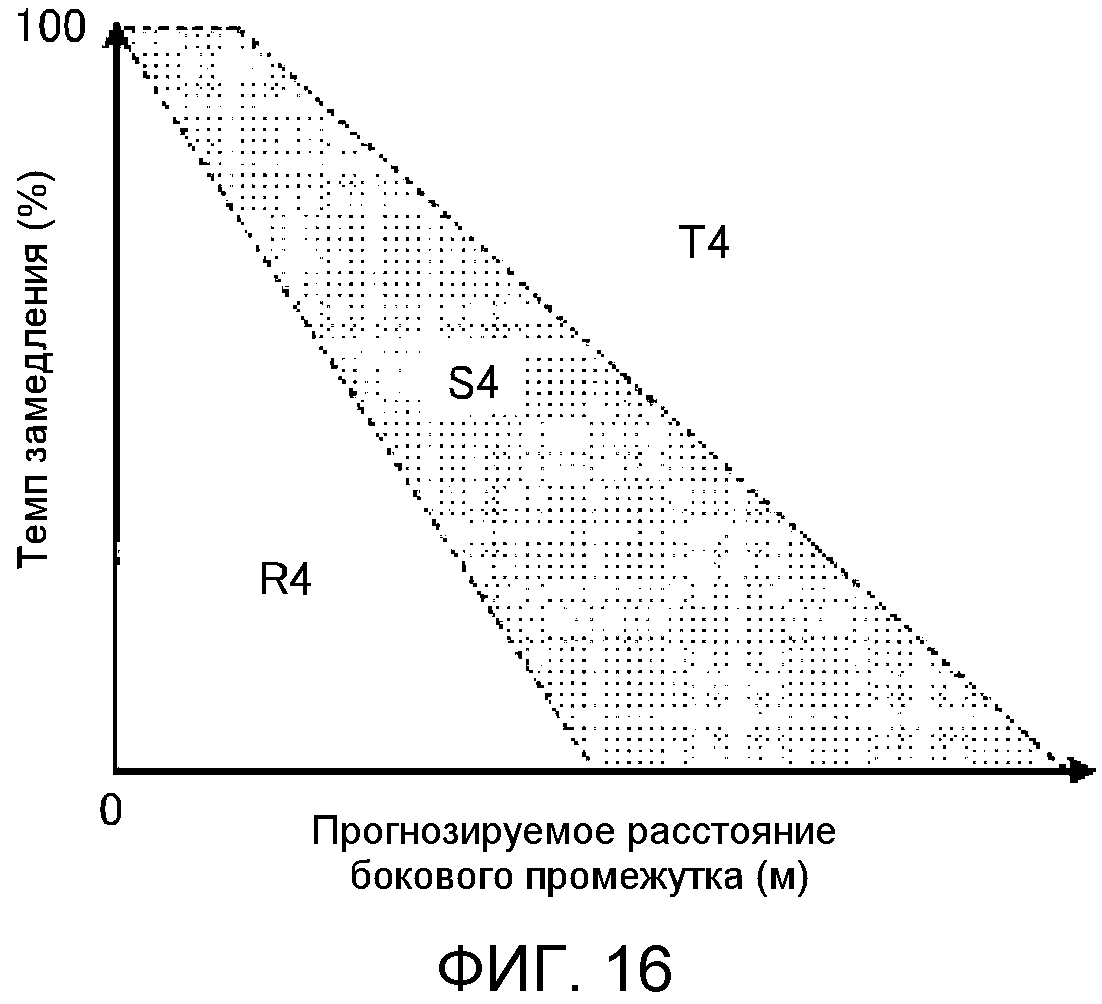
Фиг. 16 является видом, показывающим модель вождения при выявлении перехода дороги впереди.
Фиг. 17 является видом, показывающим пример модели вождения, в которой ордината показывает время выполнения действия.
Осуществление изобретения
Ниже подробно описано устройство помощи при вождении согласно варианту осуществления изобретения со ссылкой на чертежи. Следует отметить, что изобретение не ограничено этим вариантом осуществления. Дополнительно, составляющие элементы в следующих вариантах осуществления включают в себя элементы, которые могут быть легко заменены специалистами в данной области техники, или практически идентичные элементы.
Вариант осуществления
Вариант осуществления описан со ссылкой на фиг. 1-16. Это вариант осуществления относится к устройству помощи при вождении. Фиг. 1 является блок-схемой, показывающей работу устройства помощи при вождении согласно этому варианту осуществления, фиг. 2 является видом, показывающим функции устройства помощи при вождении согласно этому варианту осуществления, а фиг. 3 является блок-схемой, показывающей устройство помощи при вождении согласно этому варианту осуществления.
Устройство 1-1 помощи при вождении согласно этому варианту осуществления моделирует реакцию водителя на позу и движение пешехода, и с использованием результата моделирования в качестве опорного уровня определяет, отклоняется ли реакция водителя от опорного уровня. Когда разность между реакцией водителя и моделированной опорной реакцией является большой, либо когда прогнозируется, что разность является большой, устройство 1-1 помощи при вождении выполняет помощь при вождении. Следовательно, при использовании устройства 1-1 помощи при вождении согласно этому варианту осуществления, помощь при вождении может быть выполнена на основании реакции водителя на пешехода, и в результате помощь при вождении может быть выполнена при подавлении чувства дискомфорта, испытываемого водителем.
Как показано на фиг. 2, устройство 1-1 помощи при вождении согласно этому варианту осуществления включает в себя функцию оценки характеристик вождения и функцию помощи при вождении. Функция оценки характеристик вождения используется для того, чтобы оценивать характеристику вождения водителя относительно объекта. Здесь, объект является движущимся телом на периферии транспортного средства-носителя, например, движущимся телом впереди транспортного средства-носителя. Дополнительно, движущееся тело включает в себя пешехода, легкое транспортное средство, такое как мотоцикл и другой объект, который движется по дороге. Устройство 1-1 помощи при вождении включает в себя опорное поведение при вождении по умолчанию, созданное заранее относительно объекта. Помощь при вождении выполняется на основании опорного поведения при вождении по умолчанию до того, как выполняется достаточная дискретизация с тем, чтобы оценивать характеристику вождения водителя. С использованием функции оценки характеристик вождения характеристика вождения может быть оценена на основании фактических операций вождения, выполняемых водителем, после чего опорное поведение при вождении может быть обновлено.
Функция помощи при вождении используется для того, чтобы выполнять помощь при вождении на основании опорного поведения при вождении. Функция помощи при вождении прогнозирует разность между опорным поведением при вождении и фактической операцией вождения, выполняемой водителем, и затем определяет, выполнять ли помощь при вождении, и определяет уровень помощи для помощи при вождении. Устройство 1-1 помощи при вождении согласно этому варианту осуществления выполняет помощь при вождении на основании не только информации, связанной с пешеходом или другим движущимся телом, но также и операции вождения, выполняемой водителем. Когда помощь при вождении обеспечивается равномерно на основании информации, связанной с движущимся телом, помощь при вождении может не соответствовать ощущениям водителя. Относительно идентичной помощи при вождении, например, опытный водитель может ощутить, что помощь является чрезмерной и навязчивой, тогда как неопытный водитель может требовать более высокого уровня помощи.
Посредством обеспечения помощи при вождении на основании фактической операции вождения устройство 1-1 помощи при вождении согласно этому варианту осуществления может оказывать помощь при вождении, которая принимает во внимание реакцию водителя на позу и движение пешехода и т.п. Посредством определения, следует ли оказывать помощь, и определения уровня помощи на основании реакции на движущееся тело, может быть выполнена помощь при вождении, соответствующая ощущениям водителя. Кроме того, посредством определения уровня помощи на основании операции вождения, уровень помощи может быть определен с возможностью снижать риск приближения пешехода и т.п. посредством уведомления водителя в отношении наличия пешехода и т.п., когда водитель выполняет операцию вождения, которая отклоняется от нормальной операции.
Как показано на фиг. 3, устройство 1-1 помощи при вождении включает в себя модуль 10 вычисления информации объектов, базу 11 данных моделей, модуль 12 сбора информации транспортного средства-носителя, модуль 13 выбора модели, модуль 14 определения обновлений модели, модуль 15 определения модели, модуль 16 прогнозирования поведения при вождении, модуль 17 определения прогнозирования поведения при вождении, модуль 18 определения помощи, модуль 19 помощи в виде оповещений, модуль 20 помощи при управлении транспортным средством и устройство 30 выдачи оповещений.
Модуль 10 вычисления информации объектов вычисляет информацию, связанную с движущимся телом, служащим в качестве объекта. В нижеприведенном описании в качестве примера описан случай, в котором движущееся тело является пешеходом. Модуль 10 вычисления информации объектов получает информацию, связанную с пешеходом, на основании результатов обнаружения из различных датчиков состояния окружающей среды за пределами транспортного средства. Датчики состояния окружающей среды за пределами транспортного средства сконструированы, например, посредством радара диапазона миллиметровых волн, камеры и т.д. Модуль 10 вычисления информации объектов вычисляет информацию, указывающую положение пешехода, информацию, указывающую позу пешехода, информацию, указывающую поведение пешехода, информацию, указывающую атрибуты пешехода, и т.п. на основании результатов обнаружения из датчиков состояния окружающей среды за пределами транспортного средства. Информация, указывающая положение пешехода, включает в себя относительное положение пешехода относительно транспортного средства-носителя и относительное положение пешехода относительно полосы движения, в которой перемещается транспортное средство-носитель. Информация, указывающая позу пешехода, включает в себя ориентацию верхней части тела пешехода, ориентацию лица пешехода и позу пешехода (стоит, наклонен вперед и т.д.). Информация, указывающая поведение пешехода, включает в себя направление перемещения пешехода и скорость движения пешехода. Информация, указывающая атрибуты пешехода, включает в себя возраст, пол, одежду и расположение пешехода. Результаты вычисления, полученные посредством модуля 10 вычисления информации объектов, передаются в модуль 13 выбора модели.
Модуль 12 сбора информации транспортного средства-носителя собирает информацию, связанную с транспортным средством-носителем. Более конкретно, модуль 12 сбора информации транспортного средства-носителя получает положение транспортного средства-носителя, скорость транспортного средства-носителя, угол поворота при рулении транспортного средства-носителя, величину нажатия педали газа, величину нажатия тормоза, рабочую величину поворота руля и т.д. Сигнал, указывающий информацию, собранную посредством модуля 12 сбора информации транспортного средства-носителя, передается в модуль 13 выбора модели.
Модуль 13 выбора модели выбирает модель вождения на основании информации объектов. Множество моделей сохраняются в базе 11 данных моделей. Модуль 13 выбора модели определяет модель вождения, которая должна использоваться для управления, из числа моделей, сохраненных в базе 11 данных моделей, на основании таких признаков пешехода, как поза и поведение пешехода.
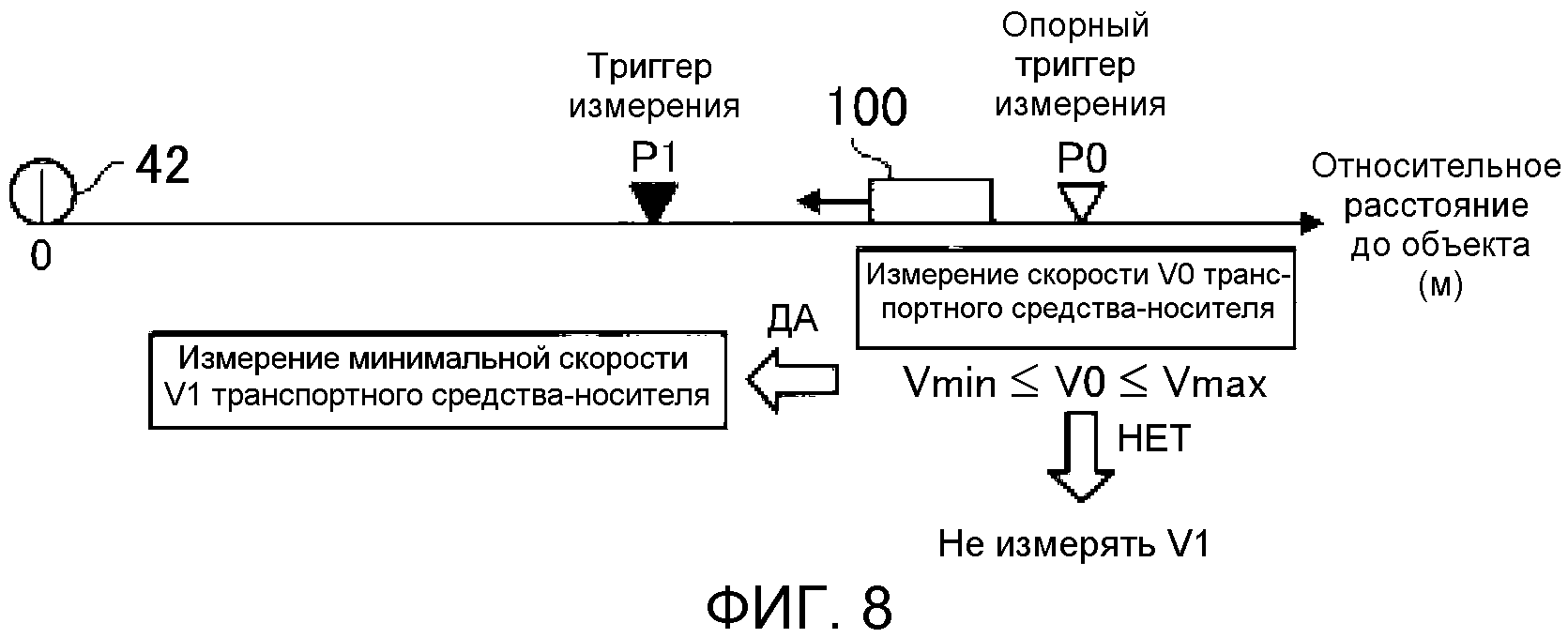
Более конкретно, модуль 13 выбора модели наблюдает пешехода (см. ссылку с номером 42 на фиг. 8) от времени инициирования опорного триггера измерения (точки, в которой проезжается P0 на фиг. 8) до времени инициирования триггера измерения (точки, в которой проезжается P1 на фиг. 8) и выбирает модель на основании (a) положения (фиксированного расстояния в пределах или за пределами полосы движения транспортного средства-носителя), (b) скорости (установившейся или неустановившейся), (c) направления перемещения (пересекающего или параллельного), (d) позы (стоит или идет), (e) ориентации позы (ориентирован по направлению к дороге или иначе), (f) ориентации верхней части тела (соответствует или не соответствует направлению транспортного средства-носителя) и т.д. пешехода, полученных посредством модуля 10 вычисления информации объектов.
Модели вождения, показанные на фиг. 4-6, являются примерами моделей, сохраненных в базе 11 данных моделей. Фиг. 4 является видом, показывающим модель нервного вождения. Фиг. 5 является видом, показывающим модель стандартного вождения. Фиг. 6 является видом, показывающим модель расслабленного вождения. Модели вождения, показанные на фиг. 4-6, являются примерами множества возможных моделей, которые определяют отношение соответствия между операцией вождения, выполняемой водителем, и информацией, указывающей относительные положения движущегося тела, обнаруженного на периферии транспортного средства-носителя, и транспортного средства-носителя. На фиг. 4-6, абсцисса показывает прогнозируемое расстояние бокового промежутка, и ордината показывает темп замедления.
Фиг. 7 является видом, иллюстрирующим прогнозируемое расстояние бокового промежутка. Прогнозируемое расстояние бокового промежутка является прогнозированным значением расстояния W между полосой 40 движения транспортного средства-носителя и пешеходом 42, служащим в качестве объекта, когда транспортное средство-носитель 100 проезжает положение Pw на полосе 40 движения транспортного средства-носителя, соответствующую положению пешехода 42. Другими словами, прогнозируемое расстояние бокового промежутка является прогнозированным значением интервала W между пешеходом 42, служащим в качестве объекта, и полосой 40 движения транспортного средства-носителя, когда транспортное средство-носитель 100 проезжает мимо пешехода 42 сбоку. Интервал W между пешеходом 42 и полосой 40 движения транспортного средства-носителя может определяться, например, в качестве абсолютной величины зазора между полосой 41 дорожной разметки на стороне тротуара полосы 40 движения транспортного средства-носителя и пешеходом 42. Тем не менее, следует отметить, что изобретение не ограничено этим, и интервал W между пешеходом 42 и полосой 40 движения транспортного средства-носителя может представлять собой, например, интервал между бордюрным камнем и пешеходом 42 и т.п. Другими словами, прогнозируемое расстояние бокового промежутка является прогнозированным значением расстояния между опорной линией или опорной точкой на полосе 40 движения транспортного средства-носителя и пешеходом 42, когда транспортное средство-носитель 100 проезжает около пешехода 42. Следует отметить, что прогнозируемое расстояние бокового промежутка может определяться в качестве абсолютной величины зазора между транспортным средством-носителем 100 и пешеходом 42. Прогнозируемое расстояние бокового промежутка соответствует относительному положению между движущимся телом, обнаруженным на периферии транспортного средства-носителя, и транспортным средством-носителем. Тем не менее, относительное положение не ограничена прогнозируемым расстоянием бокового промежутка.
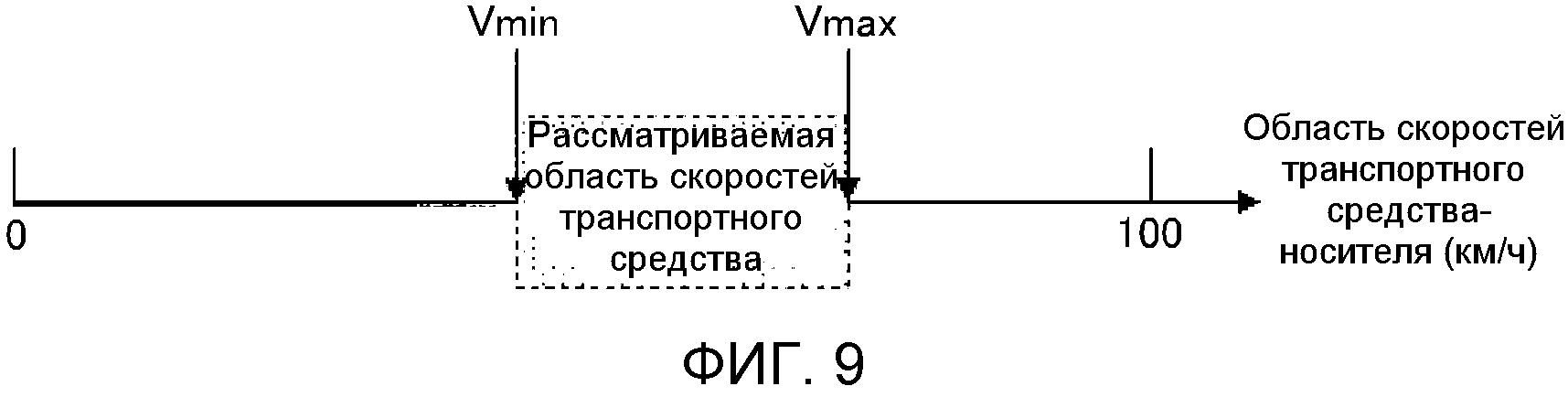
Темп замедления является темпом замедления транспортного средства-носителя 100 в заданной секции полосы 40 движения транспортного средства-носителя, находящейся впереди пешехода 42. Фиг. 8 является видом, иллюстрирующим темп замедления, и фиг. 9 является видом, показывающим рассматриваемую область скоростей транспортного средства. Как показано на фиг. 8, первая точка P0 и вторая точка P1 в полосе 40 движения транспортного средства-носителя определяются на основании относительного расстояния до пешехода 42, служащего в качестве объекта. Темп замедления транспортного средства-носителя 100 в секции между первой точкой P0 и второй точкой P1 вычисляется.
Скорость V0 транспортного средства транспортного средства-носителя 100 измеряется с использованием поступления транспортного средства-носителя 100 в первой точке P0 в качестве опорного триггера измерения. Скорость V0 транспортного средства также упоминается в качестве «опорной скорости V0 транспортного средства-носителя». Устройство 1-1 помощи при вождении отслеживает скорость транспортного средства-носителя 100 в то время, когда транспортное средство-носитель 100 движется между первой точкой P0 и второй точкой P1, и сохраняет минимальное значение скорости транспортного средства в этой секции в качестве минимальной скорости V1 транспортного средства-носителя. Темп замедления вычисляется с использованием поступления транспортного средства-носителя 100 во вторую точку P1 в качестве триггера измерения. Темп замедления вычисляется в соответствии с уравнением (1), показанным ниже.
Темп замедления = 100×{1-(V1/V0)} (1)
Следует отметить, что, когда опорная скорость V0 транспортного средства-носителя является скоростью транспортного средства за пределами рассматриваемой области скоростей транспортного средства, минимальная скорость V1 транспортного средства-носителя не измеряется, и темп замедления не вычисляется. Как показано на фиг. 9, рассматриваемая область скоростей транспортного средства определяется в качестве области скоростей транспортного средства, идущей от минимальной скорости Vmin транспортного средства до максимальной скорости Vmax транспортного средства. Минимальная скорость Vmin транспортного средства определяется, например, в качестве скорости транспортного средства, при которой может быть оценено, что транспортное средство-носитель 100 перемещается на достаточно низкой скорости. Максимальная скорость Vmax транспортного средства определяется, например, в качестве скорости транспортного средства, при которой время TTC до столкновения в первой точке P0 равно или меньше фиксированного времени.
Следовательно, прогнозируемое расстояние бокового промежутка основано на информации, связанной с пешеходом или другим движущимся телом, в то время как темп замедления указывает операцию вождения, выполняемую водителем. Соответственно, модели вождения, показанные на фиг. 4-6, являются моделями, определяющими отношение соответствия между информацией, связанной с движущимся телом, и операцией вождения.
Как показано на фиг. 4-6, область R1, R2, R3 высокого риска, опорная область S1, S2, S3 и область T1, T2, T3 низкого риска определяются для каждой модели. Опорная область S1, S2, S3 является областью, указывающей ширину темпа замедления, служащую в качестве опорного значения относительно прогнозируемого расстояния бокового промежутка. Опорные области S1, S2, S3 определяются, например, на основании распределения вероятностей с использованием темпа замедления в качестве случайной переменной. Опорные области S1, S2, S3 моделей вождения по умолчанию определяются, например, на основании данных темпа замедления, полученных из результатов эксперимента и т.п. Опорные области S1, S2, S3 определяются, например, в качестве областей, включающих в себя фиксированную долю данных, включающих в себя данные центрального значения, из всех полученных данных. Дополнительно, как описано ниже, опорные области S1, S2, S3 обновляются на основании темпов замедления, сформированных во время операций вождения, выполняемых водителем ранее.
Области R1, R2, R3 высокого риска являются областями, имеющими более низкие темпы замедления, чем опорные области S1, S2, S3. Области R1, R2, R3 высокого риска являются областями, в которых увеличенный риск может быть спрогнозирован во взаимосвязи между транспортным средством-носителем 100 и пешеходом 42, например, областями, в которых может прогнозироваться то, что вероятность того, что транспортное средство-носитель 100 приближается к пешеходу 42, так что достаточный интервал больше не может поддерживаться между транспортным средством-носителем 100 и пешеходом 42, является высокой. Области R1, R2, R3 высокого риска включают в себя область, в которой темп замедления является отрицательным, или другими словами, случай, в котором транспортное средство-носитель 100 ускоряется, а не замедляется между первой точкой P0 и второй точкой P1. Граничные линии H1, H2, H3 на стороне высокого риска, служащие в качестве граничных линий между соответствующими опорными областями S1, S2, S3 и соответствующими областями R1, R2, R3 высокого риска, являются прямыми линиями замедления, на которых опорная скорость V0 транспортного средства-носителя представляет собой минимальную скорость Vmin транспортного средства. Граничные линии H1, H2, H3 на стороне высокого риска могут представляться посредством кривых линий.
Области T1, T2, T3 низкого риска являются областями, имеющими более высокие темпы замедления, чем опорные области S1, S2, S3. Граничные линии L1, L2, L3 на стороне низкого риска, служащие в качестве граничных линий между соответствующими опорными областями S1, S2, S3 и соответствующими областями T1, T2, T3 низкого риска, являются прямыми линиями замедления, на которых опорная скорость V0 транспортного средства-носителя представляет собой минимальную скорость транспортного средства Vmax. Граничные линии L1, L2, L3 на стороне низкого риска могут представляться посредством кривых линий.
Модель нервного вождения, показанная на фиг. 4, является моделью вождения, используемой в случае, если водитель ощущает сравнительно высокую степень нервозности. Модель нервного вождения выбирается, когда, например, расстояние между полосой движения 40, в котором перемещается транспортное средство-носитель 100, и пешеходом 42 является небольшим.
Модель расслабленного вождения, показанная на фиг. 6, является моделью вождения, используемой в случае, если водитель ощущает низкую степень нервозности и, следовательно, способен справляться с ситуацией без сильного напряжения. Модель расслабленного вождения выбирается, когда, например, пешеход 42 стоит далеко от полосы 40 движения транспортного средства-носителя и ориентируется к противоположной стороне относительно стороны полосы 40 движения транспортного средства-носителя.
Модель стандартного вождения, показанная на фиг. 5, является промежуточной моделью вождения между моделью нервного вождения и моделью расслабленного вождения. Другими словами, модель стандартного вождения является моделью вождения, используемой в случае, если водитель ощущает промежуточную степень нервозности.
Фиг. 10 является видом, показывающим пример дерева решений, связанного с выбором модели. Модуль 13 выбора модели согласно этому варианту осуществления выбирает модель, например, в соответствии с деревом решений, показанным на фиг. 10. Выбор модели выполняется, когда пешеход 42 обнаруживается впереди транспортного средства-носителя 100, и модель выбирается, например, на основании информации, связанной с пешеходом 42, каждый раз, когда пешеход 42 обнаруживается посредством модуля 10 вычисления информации объектов. Следует отметить, что, когда множество пешеходов 42 обнаруживается, модель может быть выбрана для каждого пешехода 42, и модель, имеющая наибольшую степень нервозности из числа выбранных моделей, может использоваться для управления.
На дереве решений, во-первых, определение выполняется согласно положению пешехода 42. Модуль 13 выбора модели определяет, находится ли пешеход 42 за пределами полосы 40 движения транспортного средства-носителя и в пределах фиксированного расстояния от полосы 40 движения транспортного средства-носителя. Когда пешеход 42 находится в пределах фиксированного расстояния от полосы 40 движения транспортного средства-носителя, выбирается модель нервного вождения.
Когда пешеход 42 не находится в пределах фиксированного расстояния от полосы 40 движения транспортного средства-носителя, определение выполняется согласно позе пешехода 42. Модуль 13 выбора модели определяет то, стоит или идет пешеход 42. Когда пешеход 42 определяется как находящийся в стоящей позе, определение выполняется согласно ориентации позы пешехода 42. С другой стороны, когда пешеход 42 определяется как идущий, определение выполняется согласно направлению перемещения пешехода 42.
При определении, связанном с ориентацией позы пешехода 42, выполняется определение в отношении того, ориентирован пешеход 42 к стороне полосы 40 движения транспортного средства-носителя или к противоположной стороне по отношению к полосе 40 движения транспортного средства-носителя (т.е. наружу). Модуль 13 выбора модели выбирает модель стандартного вождения после определения того, что пешеход 42 ориентируется к стороне полосы 40 движения транспортного средства-носителя, и выбирает модель расслабленного вождения после определения того, что пешеход 42 ориентируется наружу.
При определении, связанном с направлением перемещения пешехода 42, выполняется определение в отношении того, является направление перемещения пешехода 42 направлением, пересекающим полосу 40 движения транспортного средства-носителя, или направлением, проходящим параллельно полосе 40 движения транспортного средства-носителя. Модуль 13 выбора модели выбирает модель стандартного вождения после определения того, что направление перемещения пешехода 42 является направлением, пересекающим полосу 40 движения транспортного средства-носителя. С другой стороны, после определения того, что направление перемещения является направлением, проходящим параллельно полосе 40 движения транспортного средства-носителя, модуль 13 выбора модели выполняет определение согласно скорости пешехода 42.
При определении, связанном со скоростью, выполняется определение в отношении того, является скорость движения пешехода 42 установившейся скоростью или неустановившейся скоростью. Модуль 13 выбора модели выбирает модель расслабленного вождения, когда скорость движения пешехода 42 является установившейся скоростью, и выбирает модель стандартного вождения, когда скорость движения пешехода 42 является неустановившейся скоростью. Следует отметить, что соответствующая модель может быть выбрана из множества моделей аналогично относительно движущегося тела, отличного от пешехода.
Элементы, которые определяются для выбора модели, не ограничены элементами, показанными на чертеже. Например, определение может выполняться согласно ориентации верхней части тела пешехода 42. Когда верхняя часть тела ориентируется таким образом, что она соответствует направлению транспортного средства-носителя 100, может выбираться модель, имеющая относительно низкую степень нервозности, а в других случаях может выбираться модель, имеющая относительно высокую степень нервозности.
Модуль 14 определения обновлений модели выполняет обработку для обновления модели, выбранной модулем 13 выбора модели. Модуль 14 определения обновлений модели может обновлять модель, определенную для использования, на основании определенной модели и операции вождения, выполняемой водителем после обнаружения движущегося тела. Фиг. 11 является блок-схемой последовательности операций способа, показывающей операцию обновления модели. Модуль 14 определения обновлений модели обновляет, например, модель в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 11. Блок-схема последовательности операций способа, показанная на фиг. 11, выполняется, когда модель выбрана посредством модуля 13 выбора модели.
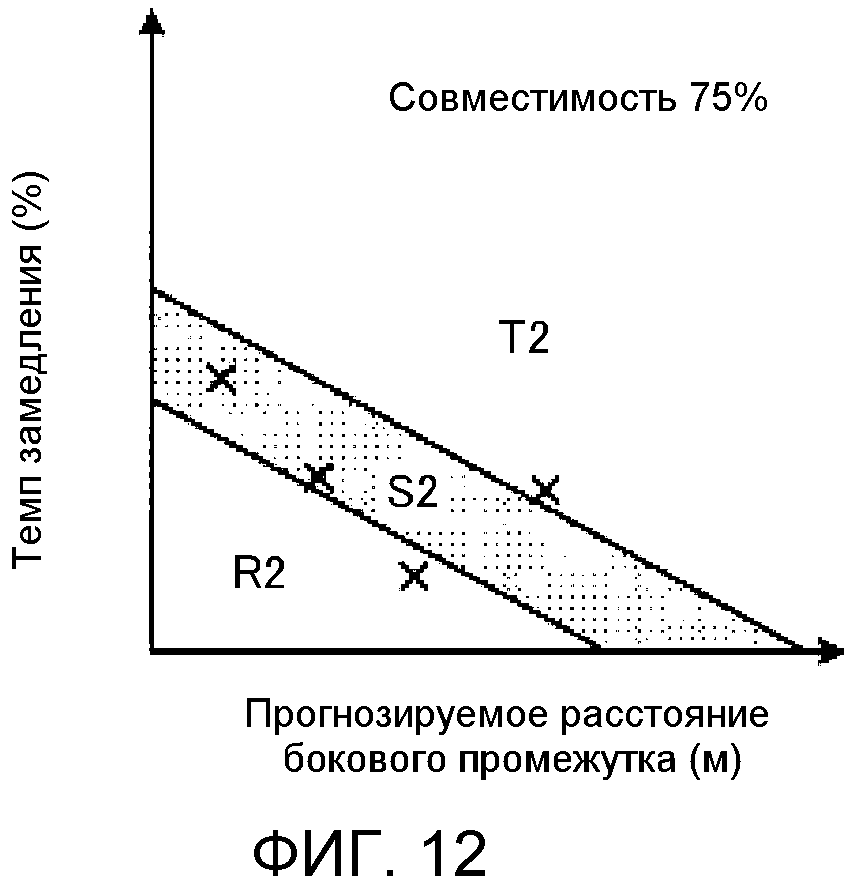
На этапе S201 вычисляется совместимость посредством модуля 14 определения обновлений модели. Совместимость указывает степень совместимости между выбранной моделью и характеристикой вождения водителя. Дополнительно, совместимость указывает степень совместимости между моделью, определенной для использования, и операцией вождения, выполняемой водителем после обнаружения движущегося тела. Модуль 14 определения обновлений модели включает в себя модуль 14a определения кратковременных обновлений, который выполняет кратковременное обновление на основании кратковременной совместимости, и модуль 14b определения долговременных обновлений, который выполняет долговременное обновление на основании долговременной совместимости.
Кратковременное обновление выполняется на основании указанного числа последних выборок. Например, когда текущая выбранная модель является моделью стандартного вождения, операции вождения, выполняемые водителем, когда модель стандартного вождения выбрана ранее, сохраняются в качестве выборок. Другими словами, выборка указывает взаимосвязь между информацией, связанной с движущимся телом, полученной, когда движущееся тело, к примеру, пешеход обнаружен ранее, и операцией вождения, выполняемой водителем после обнаружения движущегося тела, и также указывает отношение соответствия между моделью, определенной для использования, и операцией, выполняемой водителем после обнаружения движущегося тела. Когда получено указанное заданное число выборок (например, четыре), кратковременная совместимость вычисляется на основании сохраненного заданного числа выборок. Совместимость вычисляется в соответствии с уравнением (2), показанным ниже.
Совместимость = (N1/Nt)×100 (2)
Здесь, N1 является числом выборок, полученным за пределами области высокого риска, и Nt является общим числом выборок.
Фиг. 12 является видом, показывающим пример вычисления совместимости. На фиг. 12, совместимость вычисляется всего из четырех выборок, а именно, одной выборки, полученной в области R2 высокого риска, и трех выборок, полученных за пределами области R2 высокого риска. В этом случае, совместимость вычисляется равной 75% в уравнении (2). Когда совместимость вычислена, обработка переходит к этапу S202.
На этапе S202 модуль 14 определения обновлений модели определяет то, равна или превышает совместимость определенное значение либо нет. Пороговое значение для определения этапа S202 является опорным значением для определения, является ли модель совместимой с характеристикой вождения водителя, и задается равным, например, 80%. Когда в качестве результата определения этапа S202 определяется то, что совместимость равна или превышает пороговое значение (этап S202 - «Да»), обработка переходит к этапу S203, а во всех остальных случаях (этап S202 - «Нет»), обработка переходит к этапу S204.
На этапе S203 обновление модели посредством модуля 14 определения обновлений модели переключается на обработку прогнозирования поведения при вождении. После выполнения этапа S203, текущая последовательность операций управления завершается.
На этапе S204 модуль 14 определения обновлений модели переключается на модель, имеющую меньшую область риска в возможном диапазоне. Фиг. 13 является видом, показывающим пример переключения модели, выполняемого посредством модуля 14 определения обновлений модели. Как показано на фиг. 13, области R11, R21, R31 высокого риска после переключения, соответственно, меньше областей R1, R2, R3 высокого риска до переключения. В одном переключении, например, опорные области S1, S2, S3 переключаются к стороне начала координат, так что области R1, R2, R3 высокого риска, соответственно, уменьшаются на фиксированную величину или фиксированную долю. В качестве примера, максимальное значение темпа замедления в каждой области R1, R2, R3 высокого риска переключается так таким образом, что оно уменьшается на фиксированную долю относительно соответствующего прогнозируемого расстояния бокового промежутка.
Когда водитель является опытным, например, области R1, R2, R3 высокого риска по умолчанию могут быть слишком широкими, и в результате выбранная модель может не совпадать с характеристикой вождения водителя. Опытный водитель может иметь возможность оценить поведение пешехода 42 и выполнить надлежащее поведение для избегания без значительного замедления. Другими словами, в моделях по умолчанию темпы замедления, определённые в качестве областей R1, R2, R3 высокого риска, в зависимости от водителя, могут быть темпами замедления, которые должны быть классифицированы в качестве опорных областей S1, S2, S3. Когда помощь при вождении на основании моделей по умолчанию выполняется относительно этого типа водителя, водитель может ощущать, что помощь является навязчивой. С другой стороны, когда модель переключается на основании совместимости, вычисленной из операций вождения водителя, области R11, R21, R31 высокого риска могут быть обновлены таким образом, что они становятся более надлежащими. В результате помощь при вождении может оказываться в соответствии с потребностями водителя.
Кратковременное обновление предпочтительно многократно выполняется до тех пор, пока совместимость не будет равна или более порогового значения. Когда совместимость достигает или превышает пороговое значение в результате кратковременных обновлений, кратковременное обновление модели завершается. Здесь, характеристика вождения водителя может варьироваться за долгосрочный период. Например, характеристика вождения может варьироваться, когда навыки водителя совершенствуются, либо водитель привыкает к транспортному средству, и в результате совместимость моделей может снижаться. В этом варианте осуществления, следовательно, долговременное обновление выполняется для моделей. При долговременном обновлении, долговременная совместимость вычисляется на основании выборок, полученных за указанный период. Выборки, используемые для того, чтобы вычислять долговременную совместимость, могут представлять собой все выборки, полученные за указанный период, последние выборки, полученные в пределах фиксированного периода, или указанное число последних выборок. Когда долговременная совместимость меньше порогового значения, модели переключаются аналогичным образом на кратковременное обновление. Посредством выполнения долговременного обновления степень помощи обновляется в соответствии с варьированием состояния вождения водителя. В результате водитель может продолжать использование технологии помощи при вождении в течение длительного времени.
Следует отметить, что когда модели переключаются, фиксированное ограничение предпочтительно применяется к переключению. Когда, например, помощь при вождении обеспечивается посредством речи, видео и т.п., должны быть приняты меры для обеспечения запаса времени между обеспечением помощи и действиями согласно поведению для избегания водителем. Следовательно, минимальная обеспечиваемая область предпочтительно определяется в областях R11, R21, R31 высокого риска после переключения. Когда переключение модели выполнено на этапе S204, обработка переходит к этапу S201.
Следует отметить, что модели могут быть обновлены, когда замедление, вытекающее из операции вождения, выполняемой водителем, отклоняется от области T1, T2, T3 низкого риска. В этом случае, N1 может определяться в качестве числа выборок, полученного за пределами области низкого риска в уравнении (2), используемом для того, чтобы вычислять совместимость. Когда совместимость не равна или превышает пороговое значение, опорные области S1, S2, S3 переключаются к противоположной стороне относительно стороны начала координат с тем, чтобы уменьшать области T1, T2, T3 низкого риска. Посредством такого обновления моделей, надлежащая помощь при вождении может быть выполнена в случае, если водитель, который имеет тенденцию значительно замедляться, когда впереди находится пешеход, отклоняется от операции нормального замедления. Другими словами, модели могут быть обновлены с тем, чтобы снижать риск в соответствии с характеристикой вождения водителя.
Модуль 15 определения модели определяет модель, которая должна быть использована при управлении. Модуль 15 определения модели определяет модель вождения на основании результата обновления, сформированного посредством модуля 14 определения обновлений модели, и информации, собранной посредством модуля 12 сбора информации транспортного средства-носителя. Например, когда модели обновлены посредством модуля 14 определения обновлений модели, обновленная модель выбирается в качестве модели, которая должна использоваться для определения помощи вместо модели перед обновлением.
Модуль 16 прогнозирования поведения при вождении включает в себя модуль 16a прогнозирования расстояния бокового промежутка и модуль 16b вычисления темпа замедления. Модуль 16a прогнозирования расстояния бокового промежутка вычисляет прогнозируемое расстояние бокового промежутка в точке (второй точке P1), служащей в качестве триггера измерения. Прогнозируемое расстояние бокового промежутка может быть вычислено на основании результата вычисления, сформированного посредством модуля 10 вычисления информации объектов, и информации, собранной посредством модуля 12 сбора информации транспортного средства-носителя. Модуль 16b вычисления темпа замедления вычисляет опорную скорость V0 транспортного средства-носителя и минимальную скорость V1 транспортного средства-носителя из скорости, обнаруженной посредством модуля 12 сбора информации транспортного средства-носителя, и вычисляет темп замедления с использованием уравнения (1).
Модуль 17 определения прогнозирования поведения при вождении вычисляет отклонение от опорной операции вождения. Фиг. 14 является видом, иллюстрирующим распознавание отклонения и степени отклонения. На фиг. 14, направленная вниз ордината показывает отклонение, а направленная влево абсцисса показывает распознавание степени отклонения водителя. Отклонение является степенью, на которую фактический темп замедления, сформированный посредством операции вождения, выполняемой водителем, отклоняется от опорной области S2. Когда темп замедления, сформированный посредством операции вождения, принимает значение в опорной области S2 относительно вычисленного прогнозируемого расстояния бокового промежутка, отклонение является нулем. С другой стороны, когда темп замедления, сформированный посредством операции вождения, принимает значение за пределами опорной области S2, отклонение вычисляется при значении, отличном от нуля, и по мере того, как значение темпа замедления, сформированного посредством операции вождения, расходится от опорной области S2, отклонение увеличивается по абсолютной величине.
Абсолютная величина отклонения вычисляется с использованием ширины опорной области S2 в качестве единицы. Как показано на фиг. 14, одна единица отклонения представляет собой разность между максимальным значением и минимальным значением опорной области S2 при вычисленном прогнозируемом расстоянии бокового промежутка или, другими словами, ширину опорной области S2 в направлении ординаты. Когда темп замедления, сформированный посредством операции вождения, принимает значение в области R2 высокого риска, значение, полученное посредством деления разности между значением темпа замедления на граничной линии H2 на стороне высокого риска и значением темпа замедления, сформированным посредством операции вождения, на одну единицу отклонения служит в качестве отклонения.
Следует отметить, что отклонение может быть вычислено, когда темп замедления, сформированный посредством операции вождения, принимает значение в области T2 низкого риска. В этом случае, значение, полученное посредством деления разности между значением темпа замедления на граничной линии L2 на стороне низкого риска и значением темпа замедления, сформированным посредством операции вождения, на одну единицу отклонения служит в качестве отклонения. Когда темп замедления, сформированный посредством операции вождения, принимает значение в области T2 низкого риска, отклонение может задаваться равным отрицательному значению.
Модуль 18 определения помощи определяет, выполнять ли помощь при вождении, на основании отклонения, и определяет уровень помощи, на котором должна быть выполнена помощь при вождении. Помощь при вождении включает в себя помощь в виде оповещений, в которой информация передается водителю посредством речи, света, видео, вибрации и т.п., и помощь при управлении транспортным средством, при которой транспортное средство-носитель 100 управляется с возможностью способствовать поведению для избегания и т.д. Множество уровней помощи, отличающихся по степени стимулирующего воздействия, степени вмешательства посредством управления и т.д., может определяться, соответственно, для помощи в виде оповещений и помощи при управлении транспортным средством.
Отношение соответствия между отклонением и уровнем помощи может быть определено заранее, например, с использованием способа, описанного ниже. На фиг. 14, пунктирная линия 300 указывает функцию распределения (функцию плотности распределения вероятностей), полученную в качестве результата сенсорной оценки, и сплошная линия 301 указывает функцию распределения вероятностей. Функция 300 распределения создается на основании результатов психологического опроса. Психологический опрос выполняется для того, чтобы определять отклонение, при котором каждый из множества водителей начинает осознавать отклонение от операции вождения в опорной области S2. При отклонении, имеющем центральное значение для функции 300 распределения, половина водителей осознает отклонение от опорной области S2.
Функция 301 распределения вероятностей является кривой, полученной посредством интегрирования функции 300 распределения. Функция 301 распределения вероятностей является психологической кривой отклонения, выражающей степень, до которой водитель распознает отклонение сенсорным способом. Уровень помощи определяется, например, в соответствии с функцией 301 распределения вероятностей. По мере того, как возрастает функция 301 распределения вероятностей, с большей вероятностью должна выполняться операция вождения, которая информирует водителя в отношении отклонения от опорной области S2. Другими словами, когда вычисленное отклонение является отклонением, соответствующим большому значению функции 301 распределения вероятностей, водитель с большей вероятностью едет, не замечая наличия пешехода 42, или, заметив пешехода 42, едет недостаточно осторожно. Иначе говоря, по мере того, как возрастает значение функции 301 распределения вероятностей, водитель с большей вероятностью принимает помощь при вождении. Кроме того, по мере того, как возрастает значение функции 301 распределения вероятностей, помощь при вождении, имеющая высокий уровень помощи, может быть более предпочтительной.
Следовательно, посредством определения, следует ли оказывать помощь при вождении, и определения уровня помощи, на котором должна оказываться помощь при вождении, на основании значения функции 301 распределения вероятностей, задержанное осознание водителем может подавляться, и может быть оказана надлежащая помощь при вождении, так что маловероятно, что водитель испытает чувство дискомфорта. Дополнительно, посредством повышения уровня помощи в соответствии с абсолютной величиной функции 301 распределения вероятностей, водитель может быть проинформирован сенсорным способом относительно величины, на которую операция вождения отклоняется от опорной операции вождения, и в результате водитель может получать ощущение эффективности помощи при вождении.
В случае, если прогнозируется, что водителю трудно выполнять надлежащее поведение для избегания после оказания помощи в виде оповещений, модуль 18 определения помощи определяет то, что должна выполняться помощь при управлении транспортным средством. Когда темп замедления является небольшим, время, требуемое для приближения транспортного средства-носителя 100 к пешеходу 42, сокращается. Следовательно, когда водитель начинает выполнять операцию избегания после информирования в отношении пешехода 42 посредством помощи в виде оповещений, время избегания может быть запоздалым, и в результате может быть невозможным снижение риска в достаточной степени. Модуль 18 определения помощи определяет, следует ли выполнять управление помощью транспортного средства, например, на основании времени TTC до столкновения и прогнозируемого расстояния бокового промежутка.
Модуль 18 определения помощи выполняет определенную помощь при вождении. Модуль 19 помощи в виде оповещений управляет устройством 30 выдачи оповещений на основании команды оказания помощи в виде оповещений, выданной посредством модуля 18 определения помощи. Устройство 30 выдачи оповещений является устройством передачи информации, которое передает информацию водителю посредством речи, света, видео, вибрации или другого стимулирующего воздействия. Устройство 30 выдачи оповещений допускает передачу информации на множестве уровней помощи, имеющих различные интенсивности стимулирующего воздействия, и т.п. Например, когда информация передается водителю посредством звука зуммера, громкость звука может быть увеличена, или интервал прерывания звука может сокращаться по мере того, как увеличивается уровень помощи.
Модуль 20 помощи при управлении транспортным средством выполняет помощь при управлении транспортным средством на основании команды оказания помощи при управлении транспортным средством, выданной посредством модуля 18 определения помощи. Модуль 20 помощи при управлении транспортным средством допускает управление электромотором, тормозным устройством, механизмом рулевого управления и т.д., и посредством управления этими компонентами модуль 20 помощи при управлении транспортным средством может помогать операции вождения, выполняемой водителем, например, операции для того, чтобы не допускать приближения водителя к пешеходу 42 и т.п.
Здесь со ссылкой на фиг. 1 описана последовательность операций помощи при вождении согласно этому варианту осуществления. Последовательность операций управления, показанная на фиг. 1, выполняется многократно, например, в ходе движения.
Во-первых, на этапе S101 модуль 13 выбора модели выбирает модель по умолчанию. Модуль 13 выбора модели считывает модель по умолчанию, сохраненную в базе 11 данных моделей. После того как этап S101 выполнен, обработка переходит к этапу S102.
На этапе S102 информация окружения и информация транспортного средства-носителя измеряются. Модуль 10 вычисления информации объектов получает информацию окружения, включающую в себя информацию, связанную с пешеходом 42, и информацию, связанную с полосой 40 движения транспортного средства-носителя, на основании результатов обнаружения, сформированных посредством датчиков состояния окружающей среды за пределами транспортного средства. Модуль 12 сбора информации транспортного средства-носителя получает информацию транспортного средства-носителя, такую как положение, скорость, угол поворота при рулении, рабочие величины нажатия педали и т.д. транспортного средства-носителя 100.
Затем на этапе S103 выполняется определение в отношении того, находятся ли относительное расстояние и относительная скорость между пешеходом 42 и транспортным средством-носителем 100 в диапазоне измерения. Это определение выполняется, например, посредством модуля 13 выбора модели. Модуль 13 выбора модели определяет, находится ли транспортное средство-носитель 100 в области между первой точкой P0 и второй точкой P1, на основании относительного расстояния между транспортным средством-носителем 100 и пешеходом 42. Когда определяется, что транспортное средство-носитель 100 не находится в области между первой точкой P0 и второй точкой P1, определение этапа S103 является отрицательным. Модуль 13 выбора модели также определяет, составляет ли относительная скорость между транспортным средством-носителем 100 и пешеходом 42 в первой точке P0 значение не ниже минимальной скорости Vmin транспортного средства и не выше максимальной скорости Vmax транспортного средства. Когда определяется то, что относительная скорость не составляет значение не ниже минимальной скорости Vmin транспортного средства и не выше максимальной скорости Vmax транспортного средства, определение этапа S103 является отрицательным.
Когда положительный результат определения получается на этапе S103 (этап S103 - «Да»), обработка переходит к этапу S104, а во всех остальных случаях (этап S103 - «Нет»), обработка переходит к этапу S102.
На этапе S104 модуль 12 сбора информации транспортного средства-носителя наблюдает темп замедления, рабочие величины нажатия педали и т.д. Модуль 12 сбора информации транспортного средства-носителя вычисляет темп замедления на основании скорости транспортного средства-носителя 100. После того как этап S104 выполнен, обработка переходит к этапу S105.
На этапе S105 модуль 14a определения кратковременных обновлений определяет, получены ли данные, требуемые для обновления модели. Модуль 14a определения кратковременных обновлений определяет, получено ли требуемое число выборок относительно параметра выбора модели, например, комбинации поперечного расстояния между пешеходом 42 и полосой 40 движения транспортного средства-носителя и ориентации пешехода 42. Фиг. 15 является видом, показывающим пример числа данных, требуемых для обновления модели.
Число полученных выборок (числитель) и число выборок (знаменатель), служащие в качестве измерительного эталона, требуемого для обновления модели, сохраняются, соответственно, относительно комбинации ориентации пешехода 42 и поперечного расстояния до пешехода 42. На фиг. 15, требуемое число выборок данных получено относительно случая, когда, на который пешеход 42 ориентируется к стороне полосы 40 движения транспортного средства-носителя, и расстояние от полосы 40 движения транспортного средства-носителя до пешехода 42 находится в пределах фиксированного расстояния. В других случаях число выборок является недостаточным, и, следовательно, модель еще может не быть обновлена. В этом случае, если текущая выбранная модель является обновляемой моделью, выполняется обработка обновления, а если нет, модель по умолчанию используется как есть.
Когда требуемое число выборок данных получено относительно случая, соответствующего информации окружения, полученной на этапе S102, определение этапа S105 является утвердительным. Когда в качестве результата определения этапа S105 определяется то, что данные, требуемые для обновления модели, получены (этап S105 - «Да»), обработка переходит к этапу S106, а во всех остальных случаях (этап S105 - «Нет»), обработка переходит к этапу S109.
На этапе S106 модуль 14a определения кратковременных обновлений определяет обновлять модель и выполняет обновление модели. Модуль 14a определения кратковременных обновлений обновляет модель таким образом, что совместимость модели удовлетворяет заданному опорному уровню. После того как этап S106 выполнен, обработка переходит к этапу S107.
На этапе S107 модуль 14b определения долговременных обновлений определяет, требует ли модель (обновленная модель), подвергнутая кратковременному обновлению, долговременного обновления. Модуль 14b определения долговременных обновлений вычисляет долговременную совместимость текущей модели (обновленная модель) на основании результата наблюдения, полученного за фиксированный период в ежемесячные временные единицы, ежегодные временные единицы и т.п., и определяет, следует ли обновлять модель. Когда в качестве результата определения этапа S107 определяется то, что обновление модели требуется (этап S107 - «Да»), обработка переходит к этапу S108, а во всех остальных случаях (этап S107 - «Нет»), обработка переходит к этапу S110.
На этапе S108 вычисляется отклонение от повторно обновленной модели. Модуль 14b определения долговременных обновлений выполняет долговременное обновление (повторное обновление) для обновленной модели, соответствующей текущей ситуации. Модуль 17 определения прогнозирования поведения при вождении затем вычисляет отклонение на основании повторно обновленной модели, подвергнутой долговременному обновлению, и прогнозируемого расстояния бокового промежутка и темпа замедления, вычисленных посредством модуля 16 прогнозирования поведения при вождении. После того как этап S108 выполнен, обработка переходит к этапу S111.
На этапе S110 вычисляется отклонение от обновленной модели. Модуль 17 определения прогнозирования поведения при вождении вычисляет отклонение на основании обновленной модели, подвергнутой кратковременному обновлению, и прогнозируемого расстояния бокового промежутка и темпа замедления, вычисленных посредством модуля 16 прогнозирования поведения при вождении. После того как этап S110 выполнен, обработка переходит к этапу S111.
Когда определение этапа S105 является отрицательным так, что обработка переходит к этапу S109, отклонение от модели по умолчанию вычисляется на этапе S109. Модуль 17 определения прогнозирования поведения при вождении вычисляет отклонение на основании модели по умолчанию, а также прогнозируемого расстояния бокового промежутка и темпа замедления, вычисленных посредством модуля 16 прогнозирования поведения при вождении. После того как этап S109 выполнен, обработка переходит к этапу S111.
На этапе S111 модуль 18 определения помощи определяет, является ли отклонение большим. Модуль 18 определения помощи определяет, является ли отклонение, вычисленное на этапе S108, S109 или S110, большим. Например, модуль 18 определения помощи выполняет определение этапа S111 на основании результата сравнения между значением определения, определенным на основании функции 301 распределения вероятностей, и вычисленным отклонением. Когда в качестве результата определения этапа S111 определяется то, что отклонение является большим (этап S111 - «Да»), обработка переходит к этапу S113, а во всех остальных случаях (этап S111 - «Нет»), обработка переходит к этапу S112.
На этапе S112 модуль 18 определения помощи определяет то, чтобы не выполнять помощь в виде уведомлений. Модуль 18 определения помощи выводит команду для того, чтобы выключать представление информации устройством 30 выдачи оповещений. Поскольку отклонение указывает, что помощь в виде оповещений не требуется, помощь при управлении транспортным средством также отключается. После того как этап S112 выполнен, текущая последовательность операций управления завершается.
На этапе S113 модуль 18 определения помощи определяет то, чтобы выполнять помощь в виде уведомлений. Модуль 18 определения помощи выводит команду, чтобы включать представление информации устройством 30 выдачи оповещений. Модуль 19 помощи в виде оповещений затем управляет устройством 30 выдачи оповещений в соответствии с командой включения представления информации, так что выполняется помощь при вождении через уведомление. После того как этап S113 выполнен, текущая последовательность операций управления завершается.
Следовательно, устройство 1-1 помощи при вождении согласно этому варианту осуществления включает в себя множество возможных моделей, которые определяют отношение соответствия между операцией вождения, выполняемой водителем, и информацией, указывающей относительные положения движущегося тела, такого как пешеход, обнаруженный на периферии транспортного средства-носителя, и транспортного средства-носителя, определяет модель, которая должна быть использована, из множества возможных моделей на основании информации, связанной с обнаруженным движущимся телом, и выполняет помощь при вождении на основании определенной модели и операции вождения, выполняемой водителем после обнаружения движущегося тела. Соответственно, потребность в помощи при вождении и уровень помощи при вождении могут быть определены на основании реакции водителя на пешехода и т.п. В результате устройство 1-1 помощи при вождении может обеспечивать помощь при вождении с подавлением чувства дискомфорта, испытываемого водителем.
Кроме того, устройство 1-1 помощи при вождении выполняет помощь при вождении, когда отклонение от выбранной модели является большим, и модифицирует уровень помощи при вождении в соответствии со степенью отклонения. С другой стороны, когда отклонение от модели является небольшим, помощь при вождении не выполняется. Другими словами, помощь при вождении, оказываемая устройством 1-1 помощи при вождении, основана на степени отклонения между операцией вождения, выполняемой водителем после обнаружения пешехода или другого движущегося тела, и операцией вождения выбранной модели. В результате устройство 1-1 помощи при вождении может обеспечивать помощь при вождении в соответствии с ощущениями водителя.
Различные модели, к примеру модель нервного вождения, модель стандартного вождения и модель расслабленного вождения, имеют отличающиеся опорные области S1, S2, S3 и области R1, R2, R3 высокого риска. Следовательно, уровень помощи определяется в диапазоне, определенном в соответствии с выбранной моделью. Другими словами, уровень помощи определяется на основании операции вождения, выполняемой водителем в диапазоне, определенном в соответствии с информацией, связанной с пешеходом 42 или другим движущимся телом. Следовательно, уровень помощи может быть определен в надлежащем диапазоне в соответствии с позой, движением и т.д. пешехода и т.п., и в результате помощь может быть оказана в соответствии с ощущениями водителя.
Кроме того, в устройстве 1-1 помощи при вождении согласно этому варианту осуществления, потребность в помощи при вождении и уровень помощи определяются на основании отношения соответствия между отклонением от опорной области S1, S2, S3 и распознаванием степени отклонения водителя. В результате может выполняться помощь при вождении, которая соответствует ощущениям водителя, и, следовательно, маловероятно, что водитель испытает чувство дискомфорта.
Следует отметить, что когда пешеход 42 переходит или начинает переходить дорогу впереди транспортного средства-носителя 100, модель вождения при выявлении перехода дороги впереди, показанная на фиг. 16, может быть использована вместо моделей вождения, показанных на фиг. 4-6. Как показано на фиг. 16, область R4 высокого риска модели вождения при выявлении перехода дороги впереди расширяется до более высокой области темпа замедления, чем области R1, R2, R3 высокого риска других моделей вождения. Другими словами, опорная область S4, в которой прогнозируемое расстояние бокового промежутка является коротким, имеет меньшую ширину, чем опорные области S1, S2, S3 других моделей вождения. Следовательно, когда пешеход 42 начинает переходить полосу движения транспортного средства-носителя в положении близко к транспортному средству-носителю 100, риск определяется как высокий, если быстрое замедление близко к 100% (т.е. достаточное для остановки транспортного средства-носителя 100) не выполняется до второй точки P1 и, соответственно, начинается помощь при вождении.
Следует отметить, что в этом варианте осуществления, уровень помощи определяется на основании операции вождения, выполняемой водителем после обнаружения пешехода, но время определения уровня помощи не ограничено этим. Например, уровень помощи может быть определен на основании информации, связанной с пешеходом, обнаруженного впереди транспортного средства-носителя 100, и уровень помощи может быть обновлен на основании операции вождения, выполняемой водителем. Например, наибольший уровень помощи может устанавливаться, когда выбрана модель нервного вождения, промежуточный уровень помощи может устанавливаться, когда выбрана модель стандартного вождения, и наименьший уровень помощи (не включающий в себя помощь) может устанавливаться, когда выбрана модель расслабленного вождения. Когда отклонение операции вождения, выполняемой водителем, является большим, уровень помощи при вождении может быть обновлен, чтобы снижать риск, а когда отклонение не является большим, уровень помощи может оставляться как есть без обновления. Помощь может быть начата после определения, например, следует ли обновлять уровень помощи, на основании операции вождения, выполняемой водителем.
Таким образом, когда риск является высоким на уровне помощи при вождении, определенном на основании позы и движения пешехода, уровень помощи при вождении обновляется, чтобы снижать риск, а когда риск не является высоким, уровень помощи при вождении не обновляется. Таким образом, помощь при вождении может быть оказана с учетом реакции водителя на позу и движение пешехода. В результате может не допускаться возникновение у водителя чувства дискомфорта относительно содержания помощи.
Модифицированный пример варианта осуществления
Ниже описан модифицированный пример варианта осуществления. В вышеприведенном варианте осуществления темп замедления используется в качестве операции вождения для определения степени риска, но операция вождения не ограничена этим, и степень риска может быть вычислена на основании различных результатов обнаружения, связанных с операцией вождения, выполняемой водителем, таких как рабочая величина при вождении, время выполнения действия, рабочая сила, рабочая скорость или поведение транспортного средства, сформированное в результате операции вождения.
Фиг. 17 является видом, показывающим пример модели вождения, в которой ордината показывает время выполнения действия. Местоположение близко к началу координат на ординате указывает время запоздалого выполнения действия, и время выполнения действия устойчиво становится сильно заблаговременно относительно начала координат. Область R5 высокого риска расположена на стороне времени запоздалого выполнения действия для времени выполнения действия в опорной области S5, и область T5 низкого риска расположена на стороне времени заблаговременного выполнения действия для времени выполнения действия в опорной области S5.
Время выполнения действия может определяться, например, в качестве времени, когда отключается педаль газа, или времени, когда включается тормоз. Тем не менее, изобретение не ограничено этим, и время операции руления в направлении для избегания пешехода 42 может определяться в качестве времени выполнения действия по фиг. 17. Время выполнения действия может быть обнаружено раньше поведения транспортного средства. Следовательно, посредством выполнения оценки риска с использованием времени выполнения действия, потребность в помощи при вождении и уровень помощи могут быть определены заблаговременно. Кроме того, когда время и т.п. операции вождения обнаруживается вместо поведения транспортного средства, эффекты от внешних возмущений могут быть уменьшены, и в результате реакция водителя может быть обнаружена непосредственно.
Содержимое, раскрытое в варианте осуществления и в модифицированном примере, описанных выше, может быть реализовано в надлежащей комбинации.
1-1 - устройство помощи при вождении
40 - полоса движения транспортного средства-носителя
41 - полоса дорожной разметки
42 - пешеход
100 - транспортное средство-носитель
V0 - опорная скорость транспортного средства-носителя
V1 - минимальная скорость транспортного средства-носителя
P0 - первая точка
P1 - вторая точка
H1, H2, H3 - граничная линия на стороне высокого риска
L1, L2, L3 - граничная линия на стороне низкого риска
R1, R2, R3 - область высокого риска
S1, S2, S3 - опорная область
T1, T2, T3 - область низкого риска
Реферат
Изобретение относится к устройству помощи при вождении. Устройство включает в себя множество возможных моделей, которые определяют отношение соответствия между операцией вождения, выполняемой водителем, и информацией, указывающей относительные положения движущегося тела, обнаруженного на периферии транспортного средства-носителя, и транспортного средства-носителя. Устройство помощи при вождении определяет модель, которая должна быть использована, из множества возможных моделей на основании информации, связанной с обнаруженным движущимся телом, и выполняет помощь при вождении на основании определенной модели и операции вождения, выполняемой водителем после обнаружения движущегося тела. Предпочтительно определенная модель может быть обновлена на основании определенной модели и операции вождения, выполняемой водителем после обнаружения движущегося тела. Таким образом достигается помощь при вождении, при подавлении чувства дискомфорта, испытываемого водителем. 4 з.п. ф-лы, 17 ил.
Формула
- базу данных моделей, включающую в себя множество возможных моделей, определяющих отношение соответствия между операцией вождения, выполняемой водителем, и информацией, указывающей относительные положения движущегося тела, обнаруженного на периферии транспортного средства-носителя, и транспортного средства-носителя;
- модуль определения модели, выполненный с возможностью определения модели, которая должна быть использована, из множества возможных моделей на основании информации, связанной с обнаруженным движущимся телом,
- при этом помощь при вождении выполняется на основании определенной модели и операции вождения, выполняемой водителем после обнаружения движущегося тела.
Комментарии