Экстраполятор с адаптацией по целевому функционалу - RU2780197C1
Код документа: RU2780197C1
Чертежи
Описание
Изобретение относится к области цифровой обработки измерительной информации и может быть использовано для экстраполяции параметров состояния динамических систем. Известен фильтр «скользящего» сглаживания линейной траектории [1], состоящий из сумматоров, усилителей и линий задержек. Недостатком этого фильтра является низкая точность оценки состояния системы в условиях значительных внешних воздействий, обусловленная несоответствием используемой кинематической модели действительному закону изменения параметров динамической системы. Наиболее близким по технической сущности и достигаемому результату является экстраполятор [2], в основу которого положено выражение

где k - текущий момент времени, хu(k) - результат наблюдения координаты объекта, х(k) - текущее значение оценки координаты объекта, J1 и J2 - постоянные коэффициенты, определяемые согласно [3].
В основу экстраполятора положена нелинейная динамическая модель экстраполируемого процесса, что обуславливает значительные трудности при построении системы адаптации, и, как следствие низкую точность экстраполяции в условиях значительных внешних воздействий. Кроме того, нелинейные преобразования случайных процессов дают непредсказуемый результат, что может привести к срыву процесса экстраполяции.
В основу построения адаптивного экстраполятора с декомпозицией по целевому функционалу положено выражение [4]

где λ(i) - параметр адаптации,
i - количество прошедших итераций расчета параметра адаптации.
Для определения параметра адаптации используются выражения [4]
где

D - априорная дисперсия шума наблюдения,
N - количество тактов для расчета значения функционала ошибки,
Δλ - шаг изменения параметр адаптации.
Выражения (1) и (2) получены в [4] с использованием принципа декомпозиции и методологии объединенного принципа максимума.
Поиск параметра адаптации во время работы устройства производится в диапазоне
В качестве критерия для определения качества экстраполяции используется априорно заданное значение ε, определяющее невязку функционала ошибки и дисперсии шума наблюдения. Удовлетворительная точность экстраполяции достигается при
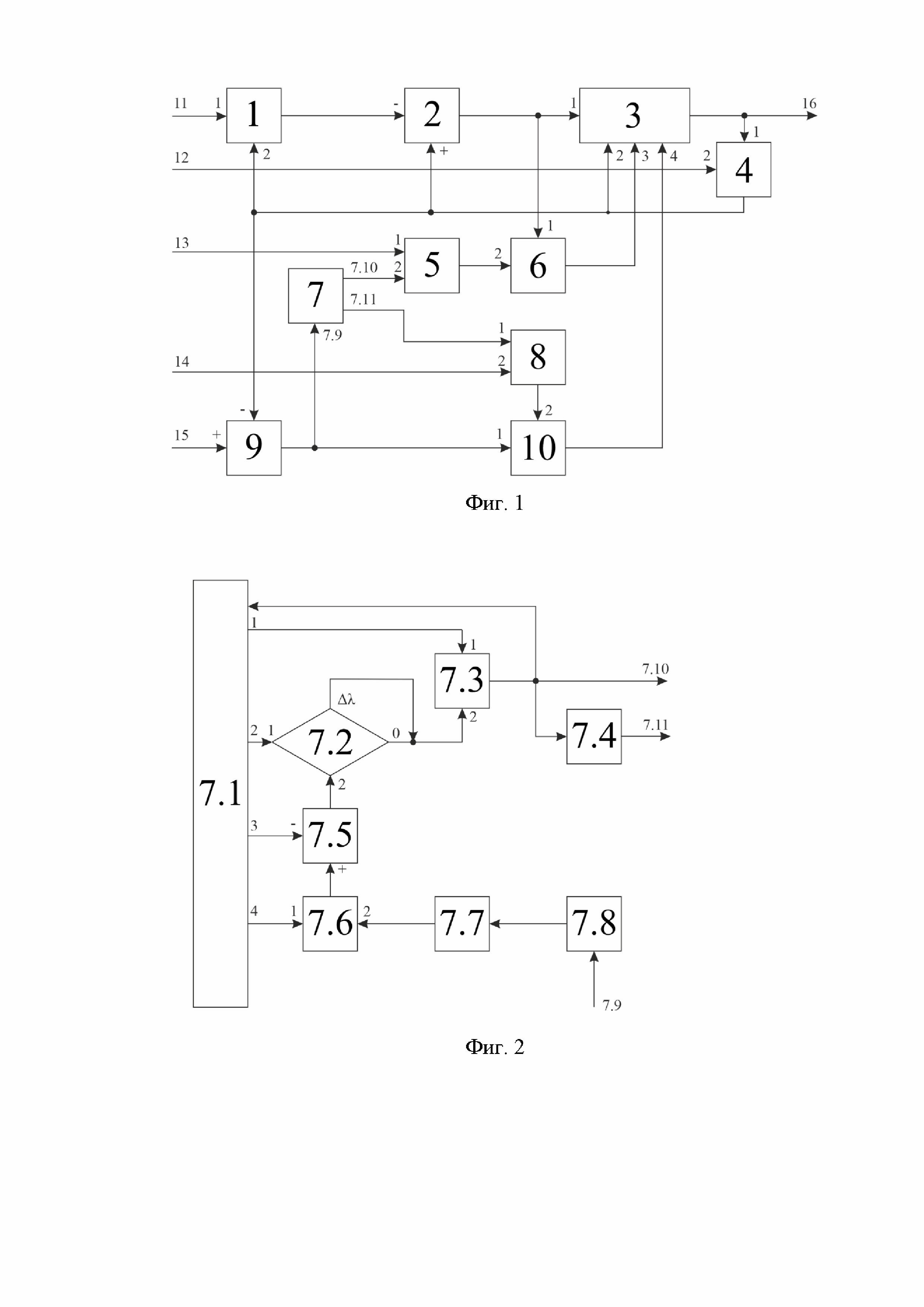
На фиг. 1 представлена структурная схема экстраполятора с адаптацией по целевому функционалу, которая состоит из запоминающих устройств 1, 4, 5 и 8, блоков вычитания 2 и 9, сумматора 3, блоков умножения 6 и 10, блока расчета параметра адаптации 7. Экстраполятор с адаптацией по целевому функционалу также имеет входы 11-12, на которые за один такт до начала работы устройства подается предварительно измеренное значение х0, численно равное хu (0); входы 13-14, на которые за один такт до начала работы устройства подаются значения λ(0)=λ0 и
В свою очередь, блок расчета параметра адаптации 7, представленный на фиг. 2 состоит из блока хранения данных 7.1, компаратора 7.2, сумматора 7.3, блоков возведения в квадрат 7.4 и 7.8, блока вычитания 7.5, блока умножения 7.6 и накопительного сумматора 7.7. Также блок расчета параметров адаптации имеет вход 7.9 и выходы 7.10 и 7.11.
Экстраполятор с адаптацией по целевому функционалу работает следующим образом. За один такт, равный шагу экстраполяции Δt, до начала работы экстраполятора с адаптацией по целевому функционалу на его входы 13 и 14 подаются значения λ (0) - и

поступающее на выход первого сумматора и на первый вход второго запоминающего устройства, с выхода которого через один такт оно уже в виде значения x(k) поступает на второй вход первого сумматора, второй вход первого запоминающего устройства и на вычитающий вход второго блока вычитания. При этом на втором и последующих тактах значение х(0) на входы 11 и 12 не подаются, а значения λ0 и

Блок расчета параметров адаптации, изображенный на фиг. 2 работает следующим образом. Каждый такт на вход 7.9 подается значение (хu(k)-х(k)) с выхода второго блока вычитания, которое поступает на вход второго блока возведения в квадрат, с выхода которого попадает на вход накопительного сумматора, суммирующего последние пришедшие N значений. Каждые N тактов, начиная с N-ого, результат сложения поступает на второй вход третьего блока умножения. На первый вход третьего блока умножения из блока хранения данных поступает значение N-l, при этом с выхода третьего блока умножения значение

Повышение точности экстраполяции достигается за счет дополнительного блока расчета параметров адаптации, позволяющего подстраивать экстраполятор для наиболее точного описания динамической системы.
Ниже приведен пример определения текущих оценок координат движущегося объекта с использованием предлагаемого устройства и их сравнения с оценками устройства-прототипа методом статистического моделирования.
Пример.
В одном пространственном измерении рассматривается движение маневрирующего объекта. Уравнение наблюдения

где х(k) - координата цели (наклонная дальность), ξ(k) - случайное воздействие на канал наблюдения с известной интенсивностью.
За показатель точности выбрана средняя квадратическая ошибка (СКО) оценки координат объекта.
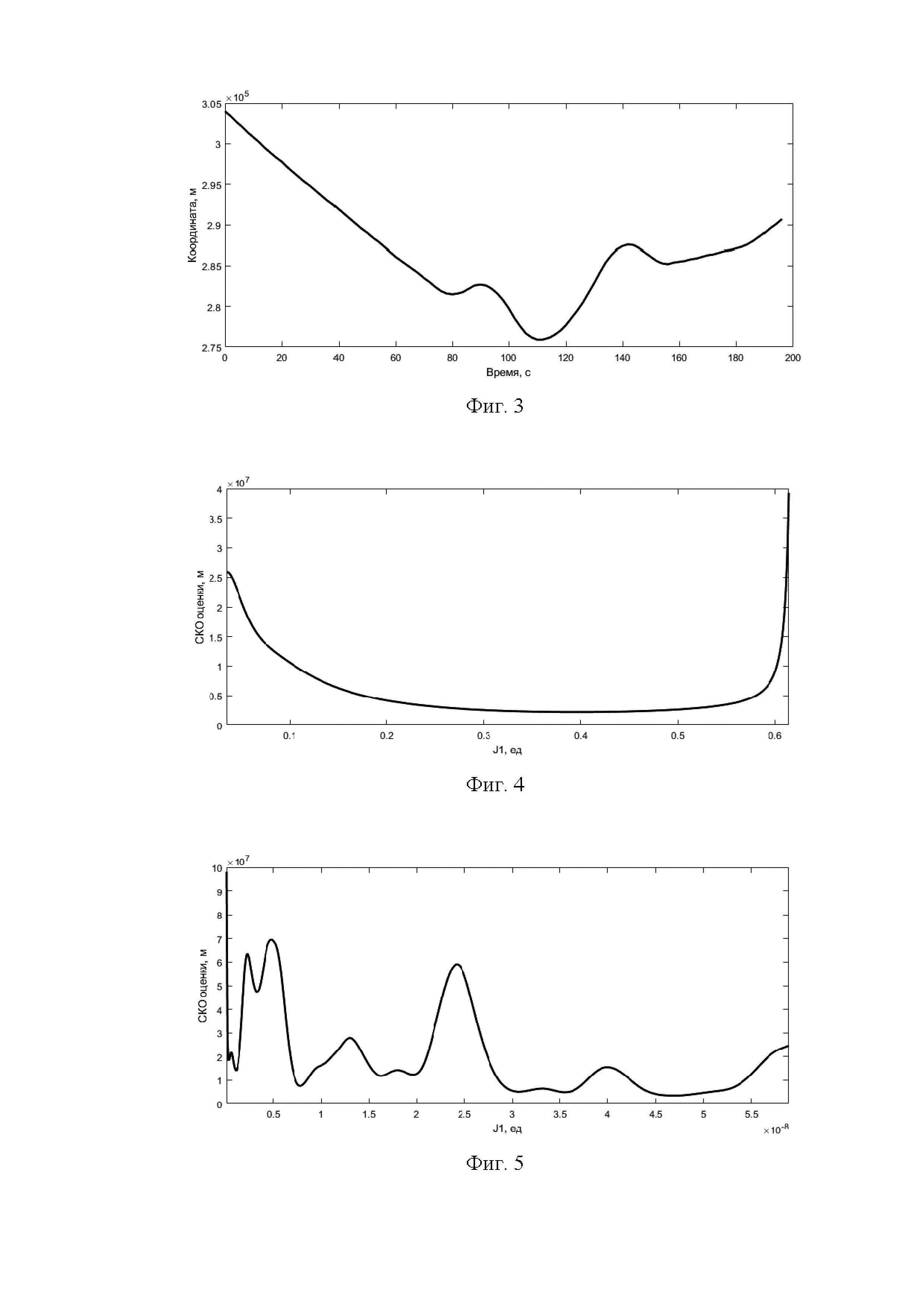
Исходные данные для статистического моделирования: начальное значение наблюдаемой координаты и скорости ее изменения х(0)=304100 м;

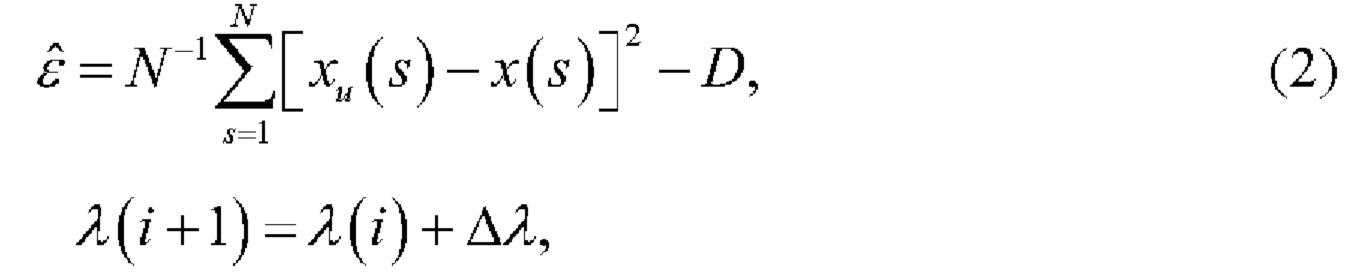
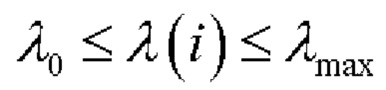
Результаты статистического моделирования для интервала маневрирования объекта с 0-й по 200-ю секунды для устройства-прототипа представлены на фигуре 4, а для адаптивного экстраполятора с декомпозицией по целевому функционалу - на фигуре 5.
В ходе моделирования получение следующие значения, необходимые для построения устройства - λ0=0.15, λmax=0.62, Δλ=0.03, ε=2⋅106.
Результаты, приведенные в примере, позволяют сделать следующие заключения:
1. В случае предлагаемого устройства, ярко выражен допустимый диапазон значений параметра адаптации, что определяет область поиска глобального минимума функционала ошибки.
2. Функция зависимости СКО оценки от параметра адаптации для адаптивного экстраполятора с декомпозицией по целевому функционалу является одноэкстремальной, что также значительно упрощает поиск параметра адаптации.
3. Использование экстраполятора с адаптацией по целевому функционалу позволяет повысить точность определения текущих оценок координат движущегося объекта по заданной траектории в среднем на 17% относительно устройства-прототипа.
Литература
1. Кузьмин С.3. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974. 432 с.
2. Патент №2601143 С1 Российская Федерация, МПК G06G 7/30, Н03Н 17/06. Адаптивный экстраполятор: №2015119552/08: заявл. 25.05.2015: опубл. 27.10.2016 / С.В. Лазаренко, А.А. Костоглотов, Д.С. Андрашитов, А.А. Кузнецов; заявитель федеральное государственное бюджетное образовательное учреждение высшего образования "Донской государственный технический университет".
3. Костоглотов А.А., Кузнецов А.А., Лазаренко С.В., Ценных Б.М. Анализ функционирования фильтра объединенного принципа максимума при сопровождении маневрирующей цели // Труды XII всероссийского совещания по проблемам управления. ВСПУ-2014, Москва ИПУ РАН, 16-19 июня 2014. С.378-338
4. Костоглотов, А.А. Метод синтеза адаптивных алгоритмов оценки параметров динамических систем на основе принципа декомпозиции и методологии объединенного принципа максимума / А.А. Костоглотов, А.С. Пеньков, С.В. Лазаренко // Известия высших учебных заведений. Северо-Кавказский регион. Серия: Естественные науки. - 2020. - №4(208). - С.22-28. - DOI 10.18522/1026-2237-2020-4-22-28.
Технический результат
Техническим результатом является повышение точности оценки параметров состояния динамических систем за счет использования динамической модели процесса, полученной на основе принципа декомпозиции и методологии объединенного принципа максимума, а также применения системы текущей оценки параметра адаптации, что позволяет значительно снизить сложность поиска параметра адаптации в сравнении с прототипом.
Реферат
Изобретение относится к области цифровой обработки измерительной информации и может быть использовано для экстраполяции параметров состояния динамических систем. Технический результат заключается в повышении точности оценки параметров состояния динамических систем за счет обеспечения текущей оценки параметра адаптации. Экстраполятор содержит цепочку последовательно соединенных первого запоминающего устройства, вход которого является входом экстраполятора, первого блока вычитания, вычитающий вход которого соединен с выходом первого запоминающего устройства, а суммирующий вход - с выходом второго запоминающего устройства, сумматор, первый вход которого соединен с выходом первого блока вычитания, второй - с выходом второго запоминающего устройства, третий - с выходом первого блока умножения, первый вход которого соединен с выходом первого блока вычитания, а второй - с выходом третьего запоминающего устройства, первый вход которого является входом экстраполятора, а второй вход - выходом блока расчета параметра адаптации, входом которого является выход второго блока вычитания, при этом четвертый вход сумматора соединен с выходом второго блока умножения, первый вход которого соединен с выходом второго блока вычитания, вычитающий вход которого соединен с выходом второго запоминающего устройства, а суммирующий вход является входом экстраполятора, в свою очередь второй вход второго блока умножения соединен с выходом второго запоминающего устройства, первый вход которого является входом экстраполятора, второй вход - выходом блока расчета параметра адаптации, а выход сумматора является выходом экстраполятора. Экстраполятор характеризуется наличием блока расчета параметра адаптации. 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Адаптивный экстраполятор
Устройство адаптивного регулирования на основе объединённого принципа максимума
Адаптивный экстраполятор с коррекцией прогноза
Комментарии