Устройство адаптивного регулирования на основе объединённого принципа максимума - RU2646373C1
Код документа: RU2646373C1
Чертежи
Описание
Изобретение относится к области цифровых систем управления и может быть использовано для решения задач быстродействия в автоматизированных системах, например в радиотехнике, для фазовой автоподстройки частоты.
Известны регуляторы с переменной структурой (см. Кузьменко А.А., Попов А.Н., Радионов И.А. Нелинейное робастное управление возбуждением синхронного генератора: синергетическая система с переменной структурой // Адаптивные и робастные системы. Таганрог. Информатика и системы управления, 2014. С. 130-139). Их недостатками являются релейный характер управления, что приводит к сложностям практической реализации подобных технических решений и сопряжено с большими энергетическими затратами, а также относительно низкое быстродействие.
Наиболее близким по технической сущности и достигаемому результату является устройство (см. патент RU №2601143, G06G 7/30, Н03Н 17/06, опубл. 27.10.2016 г.), адаптивный экстраполятор, содержащий блок формирования суммы, первый, второй и третий блоки формирования умножения, блок хранения констант, блок отношения, первый и второй блок вычисления модуля, первый и второй блок вычитания.
Недостаток такого решения - резкое возрастание управляющего воздействия в терминальной точке фазовой плоскости, что ограничивает возможность практического применения в механических системах.
Задача изобретения - увеличение быстродействия автоматизированных систем.
Она достигается использованием объединенного принципа максимума для построения устройства адаптивного регулирования за счет аппроксимации релейного режима функционирования и синтезирующей функции, которая не допускает резкого увеличения управляющего воздействия в окрестности терминальной точки.
Сущность изобретения заключается в том, что устройство адаптивного регулирования на основе объединенного принципа максимума, содержащее блоки: блок формирования суммы, первый, второй и третий блоки формирования умножения, блок хранения констант, блок вычисления отношения
Техническим результатом является увеличение быстродействия автоматизированных систем, что достигается устройством адаптивного регулирования на основе объединенного принципа максимума, которое содержит: блок линии задержки; блоки формирования модуля; блоки разности; блоки умножения; блока отношения; блок вычисления функции tan; блок хранения констант; блок формирования суммы.
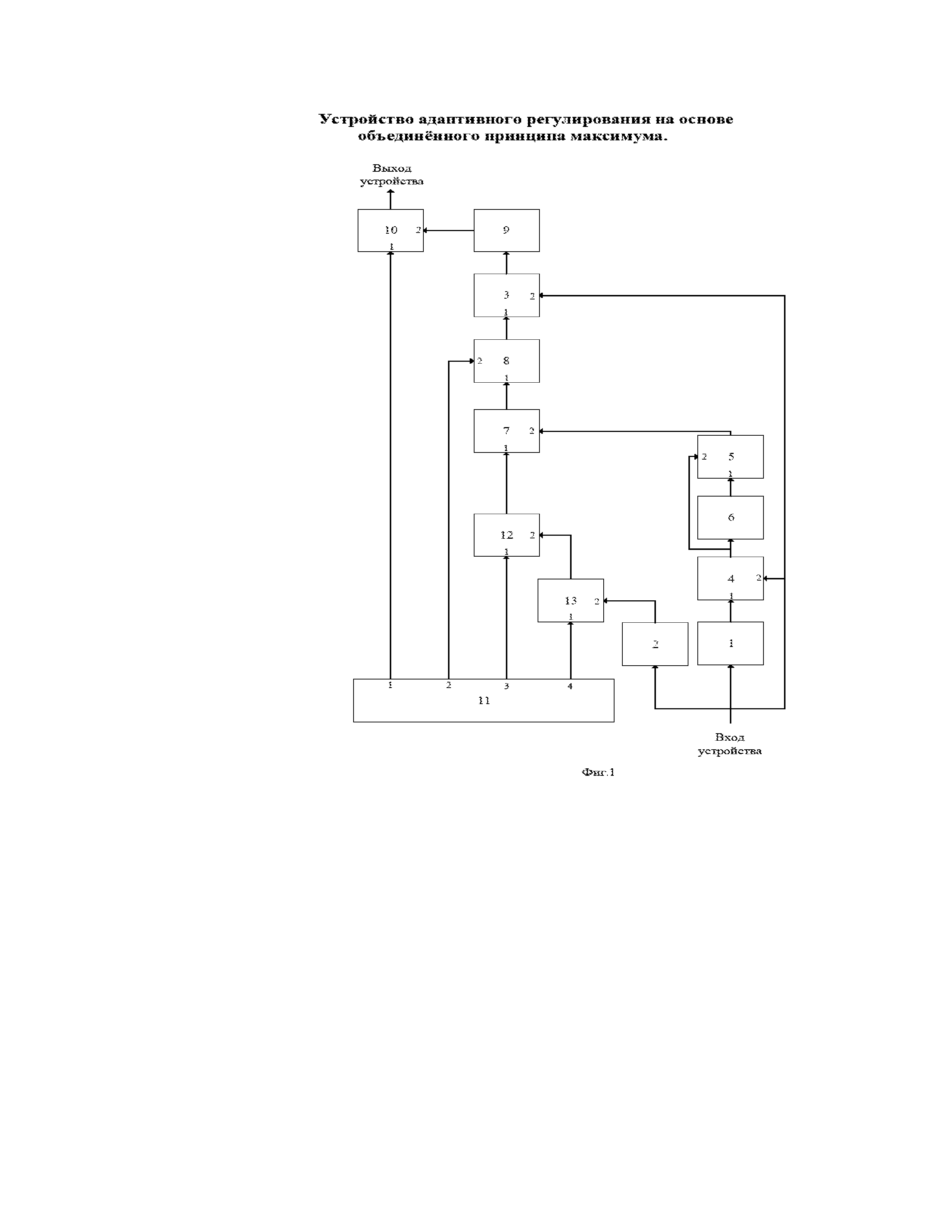
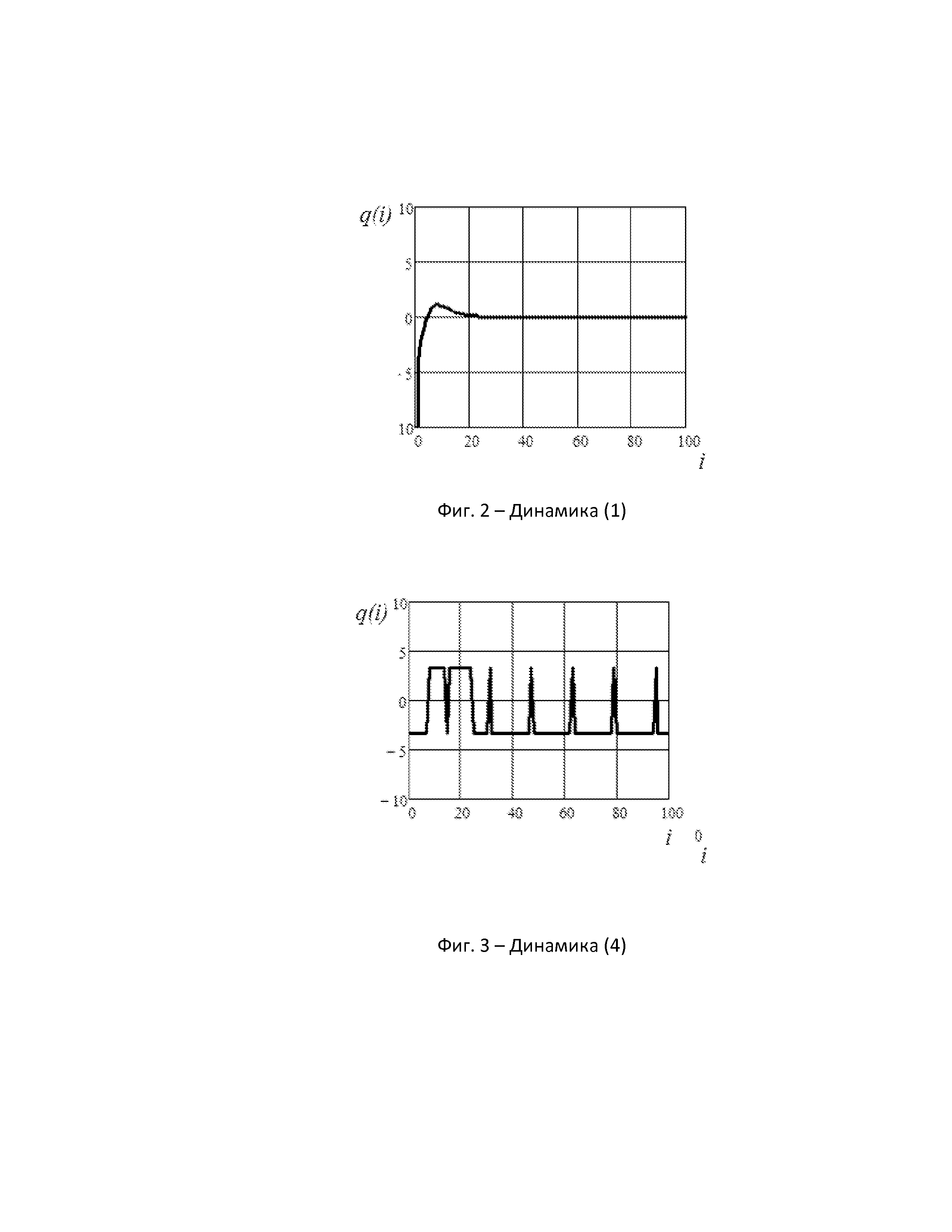
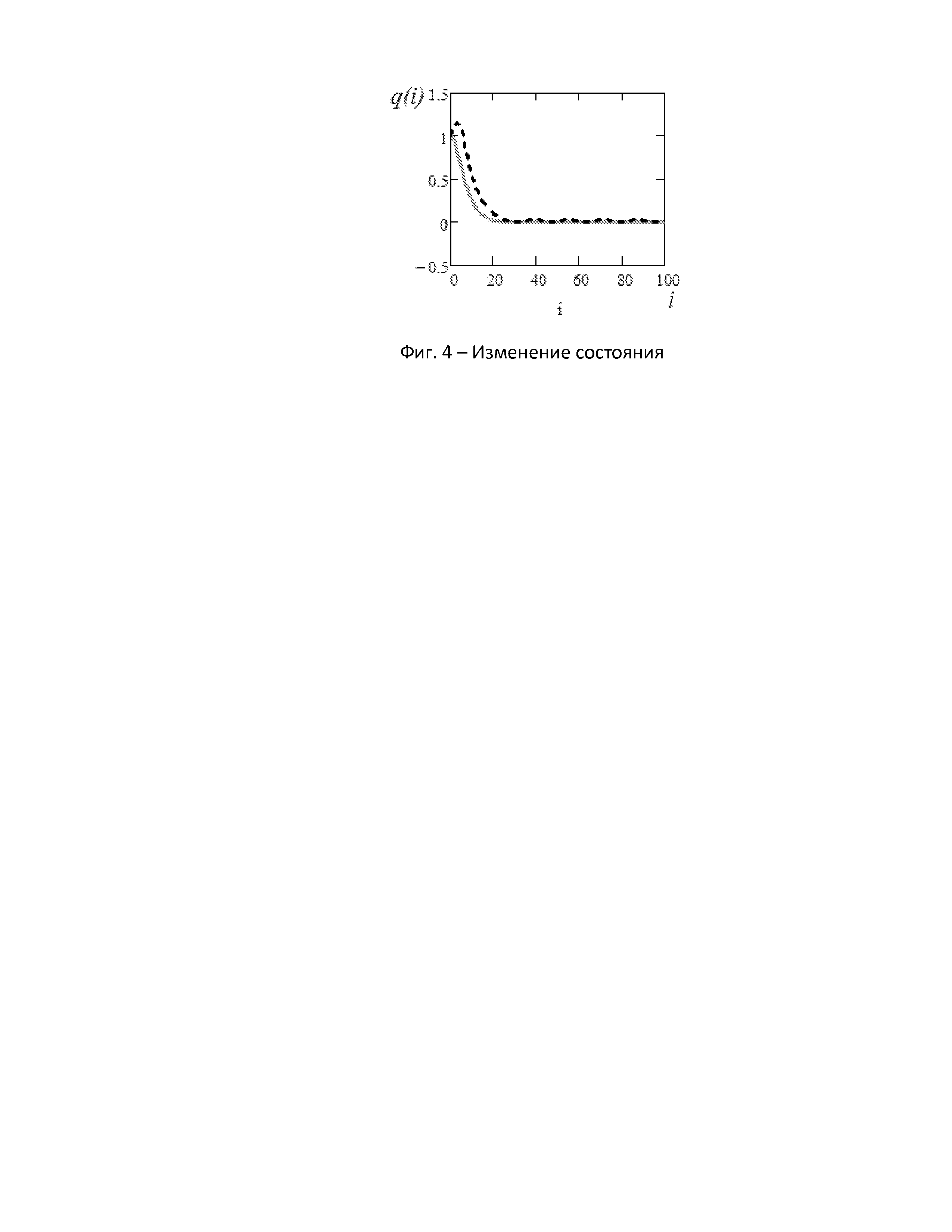
Сущность изобретения поясняется чертежом, где на фиг. 1 представлено устройство адаптивного регулирования на основе объединенного принципа максимума, а результаты математического моделирования приведены на фигурах 2, 3, 4: фиг. 2 - динамика (1), фиг. 3 - динамика (4), фиг. 4 - изменение состояния.
Вход устройства соединен со входом блока формирования линии задержки 1, входом блока формирования модуля 2, со вторым входом блока вычисления разности 3 и вторым входом блока вычисления разности 4, выход которого соединен со вторым входом блока формирования умножения 5 и входом блока формирования модуля 6, выход которого соединен с первым входом блока 5, выход которого соединен со вторым входом блока вычисления отношения 7, выход которого соединен с первым входом блока формирования умножения 8, выход которого соединен с первым входом блока вычисления разности 3, выход которого соединен со входом блока формирования функции tan 9, выход которого соединен со вторым входом блока формирования умножения 10, выход которого является выходом устройства, первый выход блока хранения констант 11 соединен со входом первым блока 10, второй выход блока 11 соединен со вторым входом блока 8, третий выход блока 11 соединен с первым входом блока формирования суммы 12, выход которого соединен с первым входом блока 7, выход четвертый блока 11 соединен с первым входом блока формирования умножения 13, выход которого соединен со вторым входом блока 12, выход блока 1 соединен с первым входом блока 4, выход блока 2 соединен со вторым входом блока 13.
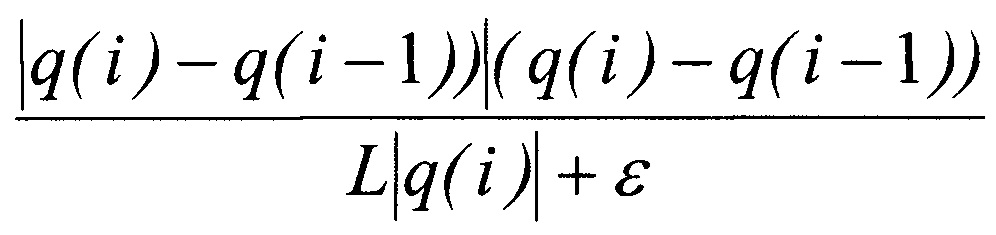
Пояснить работу устройства позволят следующие выкладки. Структура обратной связи как функции обобщенных координат в дискретном времени имеет вид:

где i - текущий момент времени, q(i) - текущее значение переменной состояния, Δt - интервал дискретизации, λ-1 - неопределенный множитель Лагранжа, L - константа, зависящая от формы линии переключения, ε - константа, определяющая сдвиг линии переключения.
Устройство работает следующим образом: за один такт, равный шагу дискретизации, до начала работы устройства значение q(i) подается на вход блока формирования линии задержки 1, на вход блока формирования модуля 2, на вход второй блока вычисления разности 3 и на вход второй блока вычисления разности 4, с выхода которого значение q(i)-q(i-1) поступает на вход второй блока формирования умножения 5 и на вход блока формирования модуля 6, с выхода которого значение |q(i)-q(i-1))| поступает на вход первый блока 5, с выхода которого значение |q(i)-q(i-1))|(q(i)-q(i-1)) поступает на вход второй блока вычисления отношения 7, с выхода которого значение



второй блока формирования умножения 10, с выхода которого значение

Пример. Рассмотрим динамическую систему второго порядка

и поставим задачу синтеза управления, обеспечивающего минимум функционалу

Оценка эффективности (1) произведена на основе сравнения с решением, которое определяется выражением

Результаты математического моделирования приведены на фигурах 2, 3 и 4. Видно, что выражение (1) в сравнении с выражением (4) обеспечивает большую скорость сходимости, в этом случае исключается чаттеринг-режим, порождаемый разрывным (релейным) управлением выражения (4), а использование отличной от патента RU №2601143 синтезирующей функции не позволяет управляющему воздействию резко возрастать в терминальной точке фазовой плоскости.
Результаты, приведенные в примере, позволяют сделать заключение о достижении заявленного технического результата.
Реферат
Изобретение относится к области цифровых систем управления и может быть использовано для решения задач быстродействия в автоматизированных системах, например в радиотехнике, для фазовой автоподстройки частоты. Технический результат – увеличение быстродействия автоматизированных систем. Он достигается тем, что предложено устройство адаптивного регулирования на основе объединённого принципа максимума, содержащее: блок формирования суммы, первый, второй и третий блоки формирования умножения, блок хранения констант, блок отношения, первый и второй блок вычисления модуля, первый и второй блок вычитания, при этом в него дополнительно введены блок линии задержки, блок формирования умножения и блок формирования функции tan. 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Адаптивный экстраполятор
Комментарии