Способ управления бесступенчатой трансмиссией транспортного средства и транспортное средство - RU2680209C2
Код документа: RU2680209C2
Чертежи










Описание
Ссылка на родственные заявки
[0001] Настоящая заявка претендует на приоритет предварительной патентной заявки США 61/934,498, поданной 31 января 2014 года, содержание которой полностью включено в настоящий документ посредством ссылки.
[0002] Настоящая заявка относится к международной заявке на патент №PCT/US2013/062125, поданной 27 сентября 2013 года, предварительной патентной заявке США 61/758,322, поданной 30 января 2013 года, и предварительной патентной заявке США 61/768,285, поданной 22 февраля 2013 года, содержание которых полностью включено в настоящий документ посредством ссылки.
Область техники, к которой относится изобретение
[0003] Настоящая технология в целом относится к бесступенчатой трансмиссии и к способам управления транспортным средством.
Уровень техники
[0004] Бесступенчатые трансмиссии (БСТ) с приводом от бесконечного ремня применяют на многих транспортных средствах, таких как снегоходы, автомобили повышенной проходимости (АПП), скутеры и т.п.для получения неограниченного количества передаточных отношений между двигателем и колесами транспортного средства. Обычно управление БСТ выполняют механически с помощью центробежных грузов (обычно на приводной стороне), преодолевающих силу пружины с получением требуемых передаточных отношений. Характеристики БСТ, включая изменение передаточного отношения как функции частоты вращения двигателя, скорости транспортного средства, крутящего момента и т.п., могут быть настроены соответствующим выбором маховиков и пружины на ведущей стороне и кулачков на ведомой стороне.
[0005] БСТ с механическим управлением имеют ограничения по вариантам управления, так как конфигурацию разнообразных компонентов нельзя изменять на ходу в зависимости от условий эксплуатации. БСТ с механическим управлением могут иметь низкий мощностной КПД из-за потерь на трение в ременной конструкции. Кроме того, при движении на постоянных высоких скоростях, от двигателя и других находящихся в нем компонентов, работающих на частотах вращения (об/мин), исходят нежелательные шумы и вибрации, а также повышается расход топлива.
[0006] В некоторых БСТ, особенно в стационарных установках, механические органы управления были заменены пневматической или гидравлической системой, регулирующими передаточное отношение БСТ. Такие полностью управляемые БСТ, в которых один или оба шкива управляются, либо гидравлически, либо пневматически или электрически, требуют присоединения к БСТ дополнительных компонентов, например, насосов и резервуаров, повышающих себестоимость и увеличивающих вес.
[0007] Таким образом, имеется потребность в способе управления БСТ, который позволял бы быстро и эффективно регулировать конфигурацию БСТ в зависимости от условий управления транспортным средством.
Сущность изобретения
[0008] Целью настоящей технологии является устранение по меньшей мере некоторых из недостатков, присущих уровню техники.
[0009] В соответствии с одним аспектом настоящей технологии обеспечивается способ управления транспортным средством на различных высотах. Транспортное средство содержит двигатель, орган управления газом, управляемый водителем транспортного средства, дроссельную заслонку, регулирующую поток воздуха к двигателю, причем положение дроссельной заслонки по меньшей мере частично основано на положении органа управления газом и бесступенчатую трансмиссию (БСТ), функционально соединенную с двигателем. БСТ содержит ведущий шкив, ведомый шкив и ремень, функционально соединяющий ведущий шкив с ведомым шкивом. По меньшей мере один контактирующий с грунтом элемент функционально соединен с ведомым шкивом и содержит по меньшей мере одно из колеса и гусеницы. Поршень функционально соединен с ведущим шкивом для приложения при приведении в действие к ведущему шкиву усилия поршня с целью изменения эффективного диаметра ведущего шкива. Блок управления управляет приведением в действие поршня и усилием поршня. Способ включает в себя определение по меньшей мере одно из высоты и атмосферного давления, определяют частоту вращения ведомого шкива и определяют по меньшей мере одно из положения органа управления газом и положения дроссельной заслонки. Поршень избирательно приводят в действие в зависимости от по меньшей мере одного из высоты и атмосферного давления. Усилием поршня управляют в зависимости от частоты вращения ведомого шкива и по меньшей мере одного из положения органа управления газом и положения дроссельной заслонки.
[0010] В некоторых вариантах осуществления усилием поршня управляют на основании карты управления.
[0011] В некоторых вариантах осуществления карта управления содержит первую карту управления, соответствующую первой высоте, и вторую карту управления, соответствующую второй высоте.
[0012] В некоторых вариантах осуществления одно из высоты и атмосферного давления является высотой. Усилие поршня устанавливают на нуль в ответ на то, что определенная высота превышает верхнюю пороговую высоту.
[0013] В некоторых вариантах осуществления транспортное средство также содержит переключатель режимов для выбора одного из множества рабочих режимов транспортного средства. Способ также включает в себя определение одного рабочего режима, который был выбран из множества рабочих режимов и управление усилием поршня, по меньшей мере, частично, на основании одного, выбранного из множества, рабочего режима транспортного средства.
[0014] В некоторых вариантах осуществления усилием поршня управляют на основании карты управления, связанной с режимом, выбранным из множества рабочих режимом транспортного средства.
[0015] В некоторых вариантах осуществления определяют частоту вращения двигателя и устанавливают усилие поршня так, чтобы оно было по меньшей мере равно минимальному усилию поршня, причем минимальное усилие поршня предварительно задают в зависимости от определенной частоты вращения двигателя.
[0016] В некоторых вариантах осуществления транспортное средство также содержит множество центробежных грузов, функционально соединенных с ведущим шкивом для управления эффективным диаметром последнего. Способ также включает управление эффективным диаметром ведущего шкива посредством центробежных грузов в зависимости от частоты вращения ведущего шкива.
[0017] В некоторых вариантах осуществления поршень является по меньшей мере одним из приводимого в действие пневматически и приводимого в действие гидравлически.
[0018] В соответствии с другим аспектом настоящей технологии обеспечивается способ управления транспортным средством. Транспортное средство содержит двигатель, орган управления газом, управляемый водителем транспортного средства, дроссельную заслонку, регулирующую поток воздуха к двигателю, причем положение дроссельной заслонки по меньшей мере частично основано на положении органа управления газом, бесступенчатую трансмиссию (БСТ), функционально соединенную с двигателем. БСТ содержит ведущий шкив, ведомый шкив и ремень, функционально соединяющий ведущий шкив с ведомым шкивом. По меньшей мере один контактирующий с грунтом элемент функционально соединен с ведомым шкивом и содержит по меньшей мере одно из колеса и гусеницы. Поршень функционально соединен с ведущим шкивом для приложения при приведении в действие к ведущему шкиву усилия поршня с целью изменения эффективного диаметра ведущего шкива. Блок управления управляет приведением в действие поршня и усилием поршня. Способ включает в себя определение по меньшей мере одного из положения органа управления газом и положения дроссельной заслонки, выявление условия паркования/трогания с места транспортного средство, указывающее или на то, что транспортное средство паркуется, или на то, что транспортное средство трогается с места, и в ответ на выявление условия паркования/трогания с места приведение в действие поршня и управление усилием поршня на основании по меньшей мере одного из положения органа управления газом и положения дроссельной заслонки.
[0019] В некоторых вариантах осуществления условие паркования/трогания с места включает в себя следующее: скорость транспортного средства ниже пороговой парковочной скорости транспортного средства; и частота вращения двигателя ниже пороговой парковочной частоты вращения двигателя. Способ также включает в себя определение частоты вращения двигателя и скорости транспортного средства.
[0020] В некоторых вариантах осуществления пороговая парковочная скорость транспортного средства составляет 10 км/ч.
[0021] В некоторых вариантах осуществления пороговая парковочная частота вращения ведомого шкива составляет 1500 об/мин.
[0022] В некоторых вариантах осуществления транспортное средство также содержит тормоз, функционально соединенный с контактирующим с грунтом элементом, а условие паркования/трогания с места также включает в себя незадействованное состояние тормоза.
[0023] В некоторых вариантах осуществления транспортное средство также содержит датчик температуры хладагента двигателя, измеряющий температуру хладагента двигателя. Способ также включает в себя определение температуры хладагента двигателя и управление усилием поршня в зависимости от температуры хладагента двигателя.
[0024] В некоторых вариантах осуществления усилие поршня является первым усилием поршня, когда температура хладагента двигателя является первой температурой хладагента двигателя, которая меньше пороговой рабочей температуры хладагента двигателя. Усилие поршня является вторым усилием поршня, когда температура хладагента двигателя является второй температурой хладагента двигателя. Вторая температура хладагента двигателя больше пороговой рабочей температуры хладагента двигателя. Второе усилие поршня меньше первого усилия поршня.
[0025] В некоторых вариантах осуществления, если выявляют существование условия паркования/трогания с места, то усилием поршня управляют независимо от частоты вращения двигателя.
[0026] В некоторых вариантах осуществления, если выявляют существование условия паркования/трогания с места, то усилием поршня управляют независимо от частоты вращения ведомого шкива.
[0027] В некоторых вариантах осуществления, транспортное средство также содержит переключатель режимов для выбора одного из множества рабочих режимов транспортного средства. Способ также включает в себя определение одного рабочего режима, который был выбран из множества рабочих режимов, и управление усилием поршня, по меньшей мере, частично, на основании режима, выбранного из множества рабочих режимов транспортного средства.
[0028] В некоторых вариантах осуществления определяют частоту вращения двигателя и устанавливают усилие поршня по меньшей мере равным минимальному усилию поршня, причем минимальное усилие поршня предварительно задают в зависимости от определенной частоты вращения двигателя.
[0029] В некоторых вариантах осуществления поршень является по меньшей мере одним из приводимого в действие пневматически и приводимого в действие гидравлически.
[0030] В некоторых вариантах осуществления обеспечивается способ управления транспортным средством. Транспортное средство содержит двигатель, орган управления газом, управляемый водителем транспортного средства, дроссельную заслонку, регулирующую поток воздуха к двигателю, причем положение дроссельной заслонки, по меньшей мере, частично, зависит от положения органа управления газом, и бесступенчатую трансмиссию (БСТ), функционально соединенную с двигателем. БСТ содержит ведущий шкив, ведомый шкив и ремень, функционально соединяющий ведущий шкив с ведомым шкивом. По меньшей мере один контактирующий с грунтом элемент функционально соединен с ведомым шкивом и содержит по меньшей мере одно из колеса и гусеницы. Поршень функционально соединен с ведущим шкивом для приложения при приведении в действие к ведущему шкиву усилия поршня с целью изменения эффективного диаметра ведущего шкива. Блок управления управляет приведением в действие поршня и усилием поршня. Способ включает в себя определение частоты вращения двигателя и управление усилием поршня в зависимости от частоты вращения двигателя.
[0031] В некоторых вариантах осуществления устанавливают усилие поршня по меньшей мере равным минимальному усилию поршня, причем минимальное усилие поршня предварительно задают в зависимости от определенной частоты вращения двигателя.
[0032] В некоторых вариантах осуществления определяют по меньшей мере одно из положения органа управления газом и положения дроссельной заслонки и выявляют условие отрицательной нагрузки, указывающее на отрицательную нагрузку на двигатель. В ответ на выявление условия отрицательной нагрузки управляют усилием поршня в зависимости от частоты вращения двигателя. Условие отрицательной нагрузки включает в себя следующее: частота вращения двигателя превышает пороговую частоту вращения двигателя для движения под уклон; и по меньшей мере одно из следующего: положение органа управления газом меньше порогового для движения под уклон положения органа управления газом; и положение дроссельной заслонки меньше порогового для движения под уклон положения дроссельной заслонки.
[0033] В некоторых вариантах осуществления, если выявляют условие отрицательной нагрузки, то усилием поршня управляют независимо от положения дроссельной заслонки и положения органа управления газом.
[0034] В некоторых вариантах осуществления если выявляют условие отрицательной нагрузки, то усилием поршня управляют независимо от частоты вращения ведомого шкива.
[0035] В некоторых вариантах осуществления транспортное средство также содержит датчик температуры хладагента двигателя, измеряющий температуру хладагента двигателя. Способ также включает в себя определение температуры хладагента двигателя и управление усилием поршня в зависимости от температуры хладагента двигателя.
[0036] В некоторых вариантах осуществления усилие поршня является первым усилием поршня, когда температура хладагента двигателя является первой температурой хладагента двигателя и вторым усилием поршня, когда температура хладагента двигателя является второй температурой хладагента двигателя. Первая температура хладагента двигателя меньше пороговой рабочей температуры хладагента двигателя. Вторая температура хладагента двигателя больше пороговой рабочей температуры хладагента двигателя. Второе усилие поршня меньше первого усилия поршня.
[0037] В некоторых вариантах осуществления транспортное средство также содержит переключатель режимов для выбора одного из множества рабочих режимов транспортного средства. Способ также включает в себя определение одного режима, выбранного из множества рабочих режимов, и управление усилием поршня, по меньшей мере, частично, на основании режима, выбранного из множества рабочих режимов транспортного средства.
[0038] В некоторых вариантах осуществления поршень является по меньшей мере одним из приводимого в действие пневматически и приводимого в действие гидравлически.
[0039] В соответствии с еще одним аспектом настоящей технологии обеспечивается способ управления транспортным средством. Транспортное средство содержит двигатель, орган управления газом, управляемый водителем транспортного средства, дроссельную заслонку, регулирующую поток воздуха к двигателю, причем положение дроссельной заслонки по меньшей мере частично основано на положении органа управления газом, бесступенчатую трансмиссию (БСТ), функционально соединенную с двигателем. БСТ содержит ведущий шкив, ведомый шкив и ремень, функционально соединяющий ведущий шкив с ведомым шкивом. По меньшей мере один контактирующий с грунтом элемент функционально соединен с ведомым шкивом и содержит по меньшей мере одно из колеса и гусеницы. Поршень функционально соединен с ведущим шкивом для приложения при приведении в действие к ведущему шкиву усилия поршня с целью изменения эффективного диаметра ведущего шкива. Блок управления управляет приведением в действие поршня и усилием поршня. Способ включает в себя выявление условия самовыключения, указывающее на то, что транспортное средство глохнет и в ответ на выявление условия самовыключения установку усилия поршня на нуль.
[0040] В некоторых вариантах осуществления способ включает в себя определение частоты вращения ведомого шкива. Условие самовыключения включает в себя следующее: уменьшается частота вращения ведомого шкива; и интенсивность уменьшения частоты вращения ведомого шкива по величине превышает пороговую интенсивность для самовыключения.
[0041] В некоторых вариантах осуществления пороговая интенсивность для самовыключения составляет 150 (об/мин)/с2.
[0042] В некоторых вариантах осуществления транспортное средство также содержит тормоз, функционально соединенный с контактирующим с грунтом элементом, а условие самовыключения также включает в себя задействованное состояние тормоза.
[0043] В некоторых вариантах осуществления поршень является по меньшей мере одним из приводимого в действие пневматически и приводимого в действие гидравлически.
[0044] В соответствии с еще одним аспектом настоящей технологии обеспечивается способ управления транспортным средством. Транспортное средство содержит двигатель, орган управления газом, управляемый водителем транспортного средства, дроссельную заслонку, регулирующую поток воздуха к двигателю, причем положение дроссельной заслонки по меньшей мере частично основано на положении органа управления газом, и бесступенчатую трансмиссию (БСТ), функционально соединенную с двигателем. БСТ содержит ведущий шкив, ведомый шкив и ремень, функционально соединяющий ведущий шкив с ведомым шкивом. По меньшей мере один контактирующий с грунтом элемент функционально соединен с ведомым шкивом и содержит по меньшей мере одно из колеса и гусеницы. Поршень функционально соединен с ведущим шкивом для приложения при приведении в действие к ведущему шкиву усилия поршня с целью изменения эффективного диаметра ведущего шкива. Блок управления управляет приведением в действие поршня и усилием поршня. Способ включает в себя определение частоты вращения ведомого шкива. Выявляют условие остановки на подъеме, указывающее на то, что транспортное средство останавливается на подъеме, и в ответ на выявление условия остановки на подъеме управляют усилием поршня в зависимости от частоты вращения ведомого шкива.
[0045] В некоторых вариантах осуществления транспортное средство также содержит тормоз, функционально соединенный с по меньшей мере одним контактирующим с грунтом элементом. Условие остановки на подъеме также включает в себя задействование тормоза с последующим его отпусканием и по меньшей мере одно из следующего: положение органа управления газом меньше порогового для остановки на подъеме положения органа управления газом и положение дроссельной заслонки меньше порогового для остановки на подъеме положения дроссельной заслонки;
[0046] В некоторых вариантах осуществления измеряют уклон дороги, а условие остановки на подъеме также включает в себя то, что измеренный уклон является положительным.
[0047] В некоторых вариантах осуществления управление усилием поршня включает в себя, в ответ на то, что частота вращения ведомого шкива отрицательна, увеличение усилия поршня до тех пор, пока не произойдет по меньшей мере одного из следующего: частота вращения ведомого шкива станет нулевой; и усилие поршня станет равным максимальному усилию поршня.
[0048] В некоторых вариантах осуществления усилие поршня увеличивают с такой интенсивностью, чтобы усилие поршня увеличилось до максимального усилия поршня за пороговую длительность остановки на подъеме.
[0049] В некоторых вариантах осуществления пороговая длительность остановки на подъеме составляет одну секунду.
[0050] В некоторых вариантах осуществления поршень является по меньшей мере одним из приводимого в действие пневматически и приводимого в действие гидравлически.
[0051] В некоторых вариантах осуществления определяют частоту вращения двигателя и устанавливают усилие поршня на значение, по меньшей мере равное минимальному усилию поршня, причем минимальное усилие поршня предварительно задают в зависимости от определенной частоты вращения двигателя.
[0052] В соответствии с другим аспектом настоящей технологии, обеспечивается транспортное средство, содержащее двигатель, орган управления газом, управляемый водителем транспортного средства, дроссельную заслонку, регулирующую поток воздуха к двигателю, причем положение дроссельной заслонки по меньшей мере частично основано на положении органа управления газом, бесступенчатую трансмиссию (БСТ), функционально соединенную с двигателем. БСТ содержит ведущий шкив, ведомый шкив и ремень, функционально соединяющий ведущий шкив с ведомым шкивом. По меньшей мере один контактирующий с грунтом элемент функционально соединен с ведомым шкивом и содержит по меньшей мере одно из колеса и гусеницы. Поршень функционально соединен с ведущим шкивом для приложения при приведении в действие к ведущему шкиву усилия поршня с целью изменения эффективного диаметра ведущего шкива. Блок управления управляет приведением в действие поршня и усилием поршня. Датчик высоты измеряет по меньшей мере одно из высоты и атмосферного давления. Блок управления выполнен с возможностью управления приведением в действие поршня и усилием поршня в зависимости от измеренного по меньшей мере одного из высоты и атмосферного давления.
[0053] В некоторых вариантах осуществления множество центробежных грузов функционально соединены с ведущим шкивом для управления эффективным диаметром последнего.
[0054] В некоторых вариантах осуществления транспортное средство также содержит переключатель режимов для выбора одного из множества рабочих режимов транспортного средства, а блок управления выполнен с возможностью управления усилием поршня, по меньшей мере, частично, на основании рабочего режима, выбранного из множества рабочих режимов транспортного средства.
[0055] В некоторых вариантах осуществления транспортное средство также содержит соединенную с поршнем по меньшей мере одну из гидравлической и пневматической систем, а блок управления соединен с по меньшей мере одной из гидравлической и пневматической систем для управления усилием поршня.
[0056] В соответствии с другим вариантом осуществления обеспечивается транспортное средство, содержащее двигатель, орган управления газом, управляемый водителем транспортного средства, дроссельную заслонку, регулирующую поток воздуха к двигателю, причем положение дроссельной заслонки по меньшей мере частично основано на положении органа управления газом, бесступенчатую трансмиссию (БСТ), функционально соединенную с двигателем. БСТ содержит ведущий шкив, ведомый шкив и ремень, функционально соединяющий ведущий шкив с ведомым шкивом. По меньшей мере один контактирующий с грунтом элемент функционально соединен с ведомым шкивом и содержит по меньшей мере одно из колеса и гусеницы. Поршень функционально соединен с ведущим шкивом для приложения при приведении в действие к ведущему шкиву усилия поршня с целью изменения эффективного диаметра ведущего шкива. Блок управления управляет приведением в действие поршня и усилием поршня. Датчик температуры хладагента двигателя измеряет температуру хладагента системы охлаждения двигателя. Датчик частоты вращения двигателя измеряет частоту вращения двигателя. Датчик частоты вращения ведомого шкива измеряет частоту вращения ведомого шкива. Блок управления выполнен с возможностью управления приведением в действие поршня и усилием поршня в зависимости от по меньшей мере одного из следующего: рабочего режима, выбранного из множества рабочих режимов двигателя, измеренной температуры хладагента двигателя, измеренной частоты вращения двигателя и измеренной частоты вращения ведомого шкива.
[0057] В некоторых вариантах осуществления множество центробежных грузов функционально соединены с ведущим шкивом для управления эффективным диаметром последнего.
[0058] В некоторых вариантах осуществления транспортное средство также содержит соединенную с поршнем по меньшей мере одну из гидравлической и пневматической систем, а блок управления соединен с по меньшей мере одной из гидравлической и пневматической систем для управления усилием поршня.
[0059] В некоторых вариантах осуществления транспортное средство также содержит селектор усилия поршня, каковым селектором может действовать водитель транспортного средства. Блок управления соединен с селектором усилия поршня для получения от указанного селектора выбора водителя, при том, что блок управления выполнен с возможностью управления усилием поршня, по меньшей мере, частично, на основании полученного выбора водителя.
[0060] В другом аспекте способ включает в себя управление усилием поршня, по меньшей мере, частично, на основании рабочего режима транспортного средства.
[0061] Применительно к настоящей заявке, термины, относящиеся к пространственной ориентации в описании транспортного средства и компонентов относительно транспортного средства, такие как «спереди», «сзади», «слева», «справа», «сверху» и «снизу» следует понимать с точки зрения водителя, когда транспортное средство ориентировано прямо вперед (то есть, не поворачивает влево или вправо) в строго вертикальном положении (то есть, не наклонено).
[0062] Определения терминов, приведенные здесь, обладают приоритетом относительно терминов, приведенных в любом из документов, включенных в настоящий документ посредством ссылки.
[0063] Каждое из осуществлений настоящей технологии имеет по меньшей мере одну из вышеупомянутых целей и/или аспектов, но не обязательно все из них. Следует понимать, что некоторые аспекты настоящей технологии, явившиеся результатом попыток достижения вышеупомянутой цели, могут не удовлетворять данной цели и/или могут удовлетворять другим целям, конкретно не указанным здесь.
[0064] Дополнительные и/или альтернативные признаки, аспекты и преимущества настоящей технологии станут очевидными из нижеследующего описания, сопроводительных чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[0065] Для лучшего понимания настоящей технологии, а также других ее аспектов и дополнительных признаков, предлагается ознакомиться с нижеизложенным описанием, которое должно рассматриваться вместе с сопроводительными чертежами, на которых:
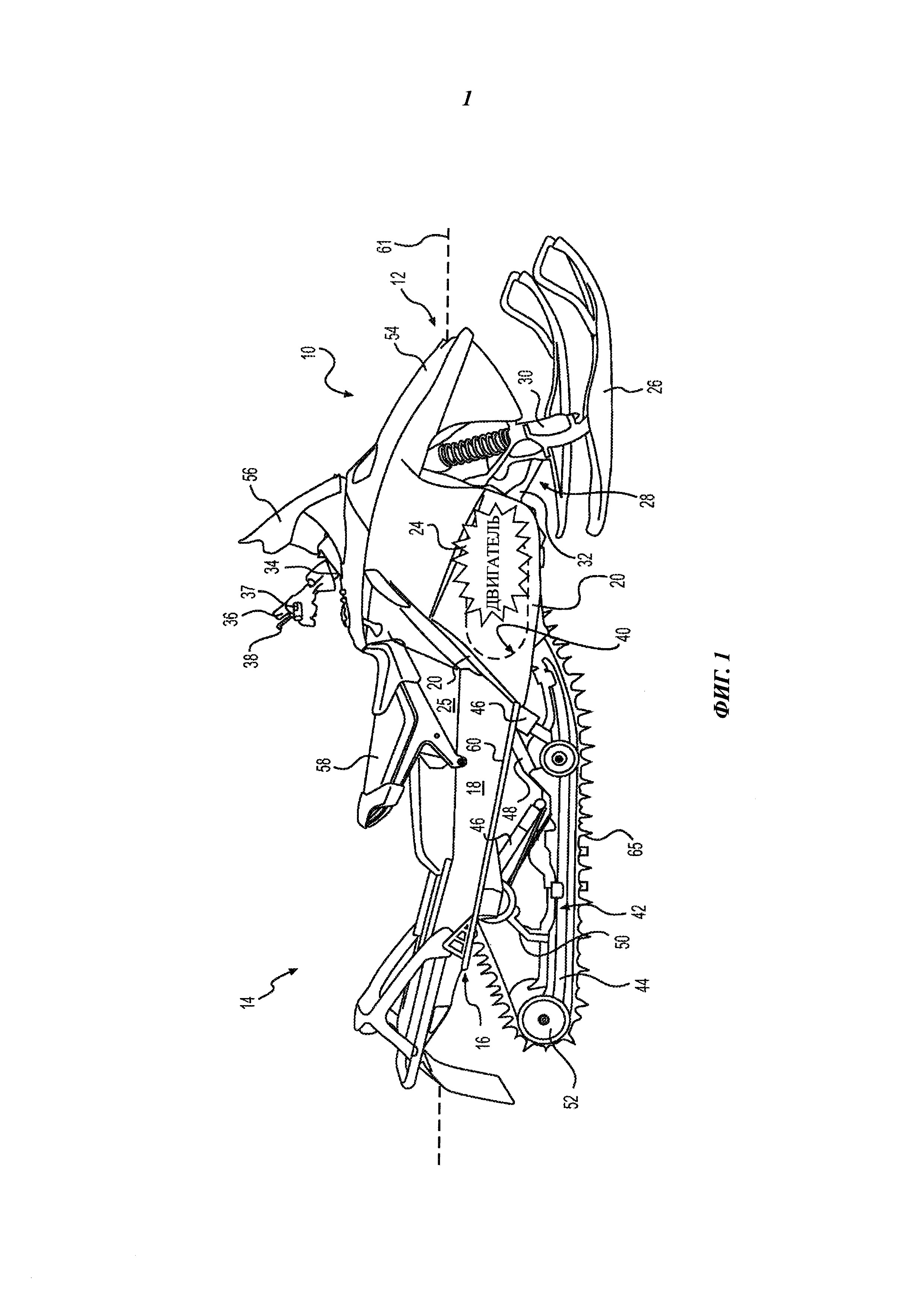
[0066] на фиг. 1 снегоход изображен на виде справа;
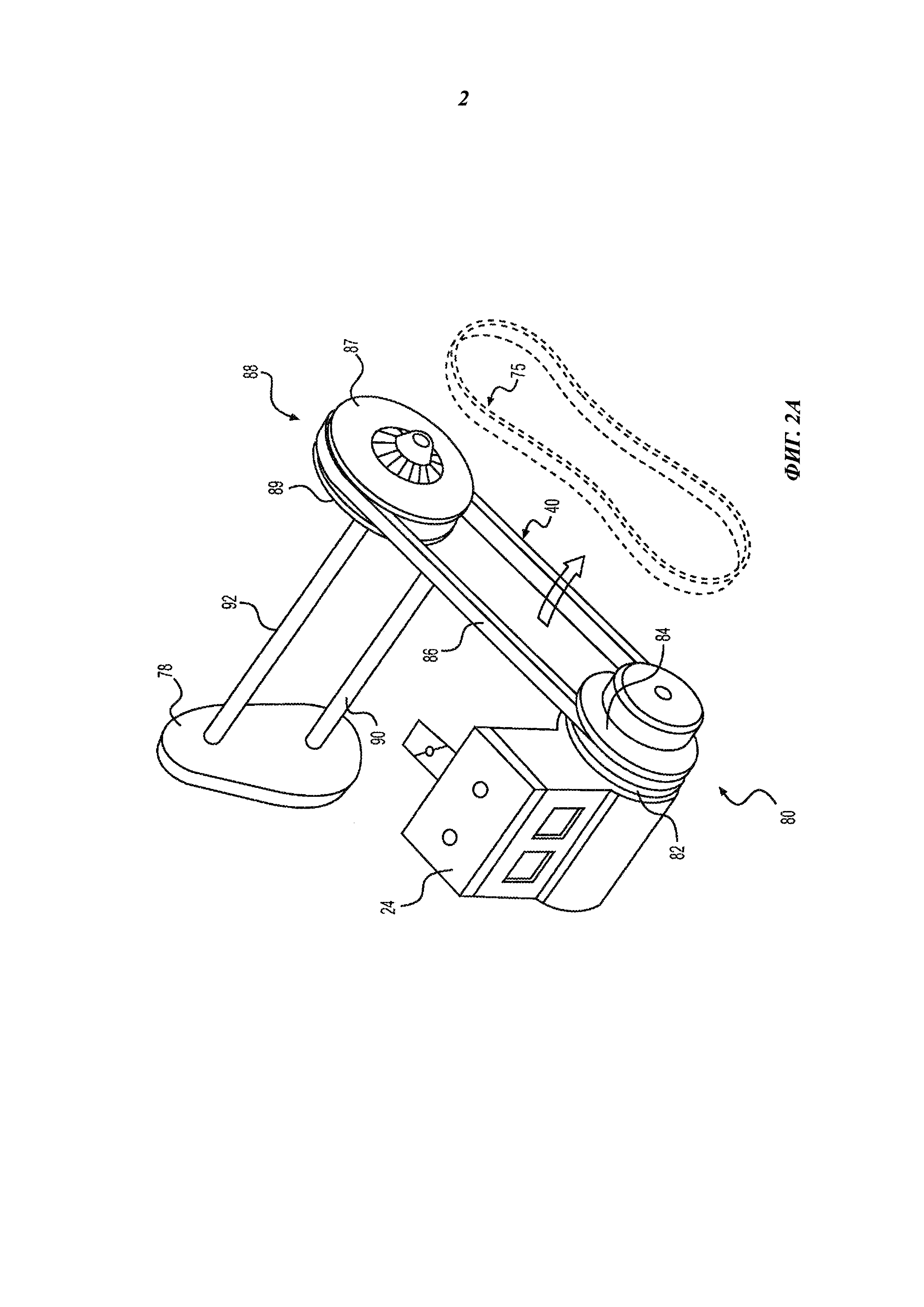
[0067] на фиг. 2А на виде в аксонометрии спереди слева показан силовой агрегат изображенного на фиг. 1 снегохода;
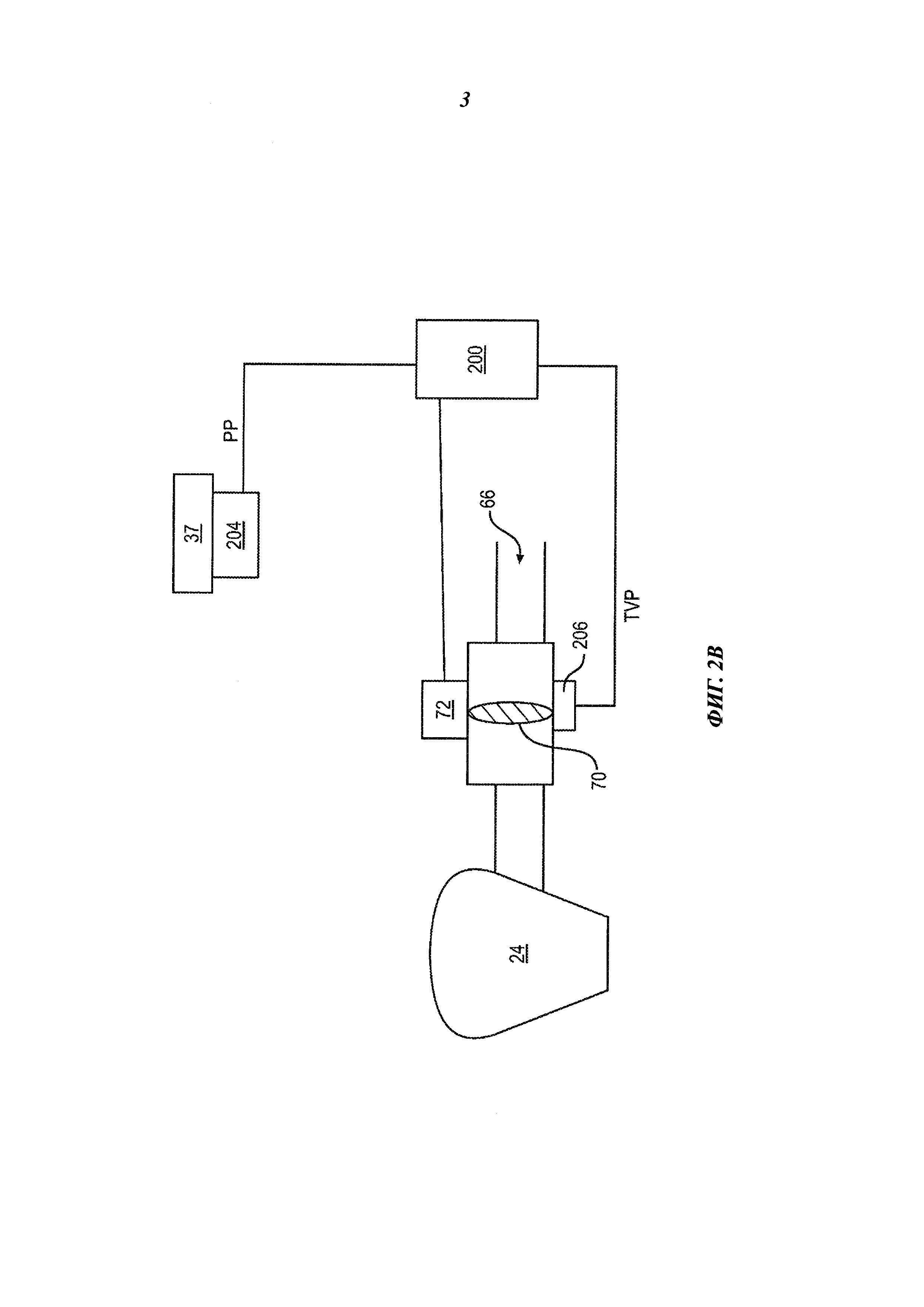
[0068] на фиг. 2 В схематически показана система управления дроссельной заслонкой изображенного на фиг. 1 снегохода;
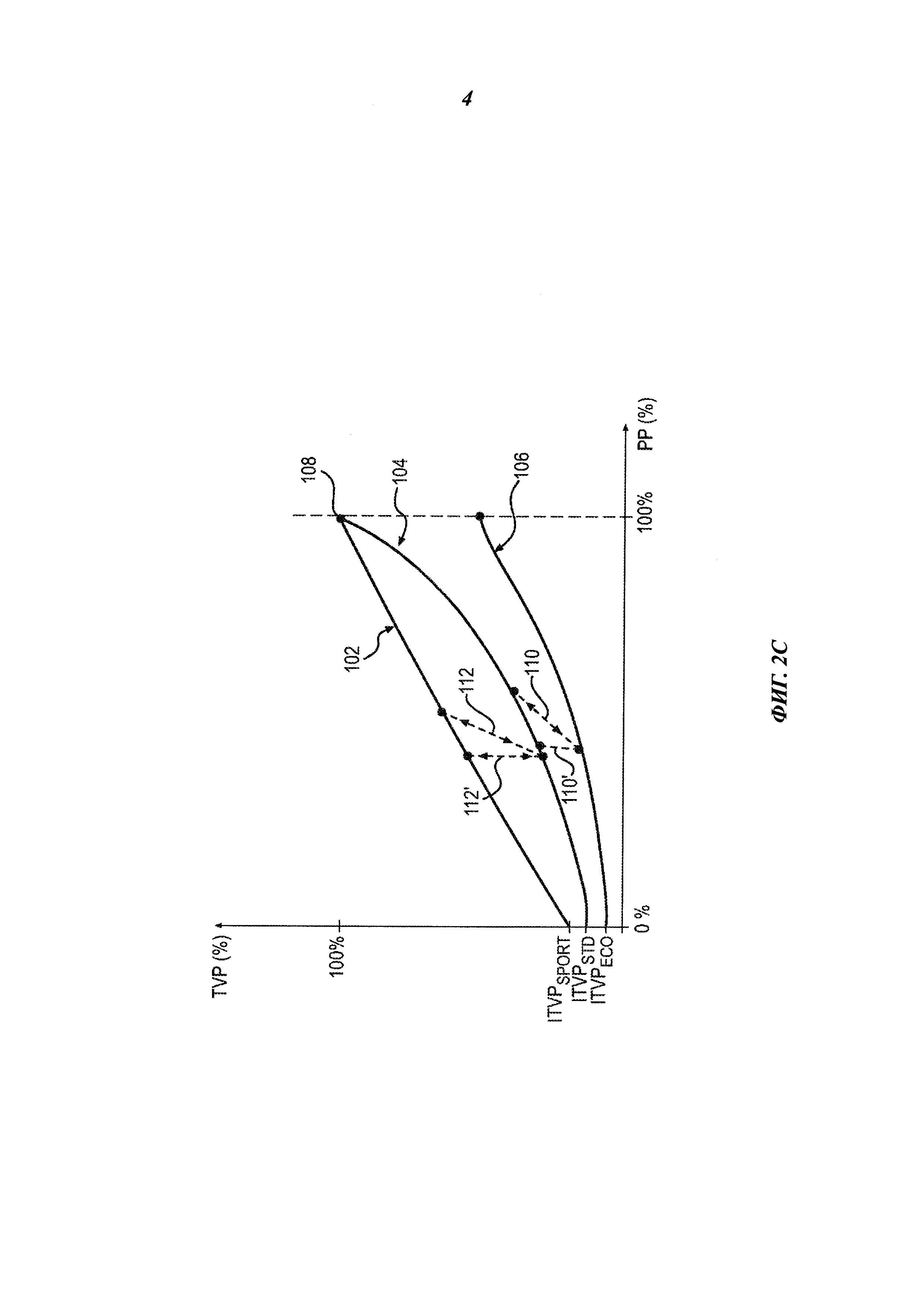
[0069] на фиг. 2С проиллюстрирована реакция дроссельной заслонки на изменение положение органа управления газом в различных рабочих режимах изображенного на фиг. 1 снегохода;
[0070] на фиг. 3 схематически показаны элементы электронного блока управления двигателем изображенного на фиг. 1 снегохода;
[0071] на фиг. 4А на виде в разрезе показан ведущий шкив бесступенчатой трансмиссии (БСТ) показанного на фиг. 2 силового агрегата, причем ведущий шкив находится в неактивной конфигурации;
[0072] на фиг. 4 В ведущий шкив, изображенный на фиг. 4А, показан на виде в разрезе и в рабочей конфигурации;
[0073] на фиг. 5 схематически показана пневматическая система управления для БСТ силового агрегата, показанной на фиг. 2;
[0074] на фиг. 6 показана блок-схема, иллюстрирующая способ управления БСТ на различных высотах и в различных режимах.
[0075] на фиг. 7 показана карта управления усилием поршня для работы в спортивном режиме на уровне моря;
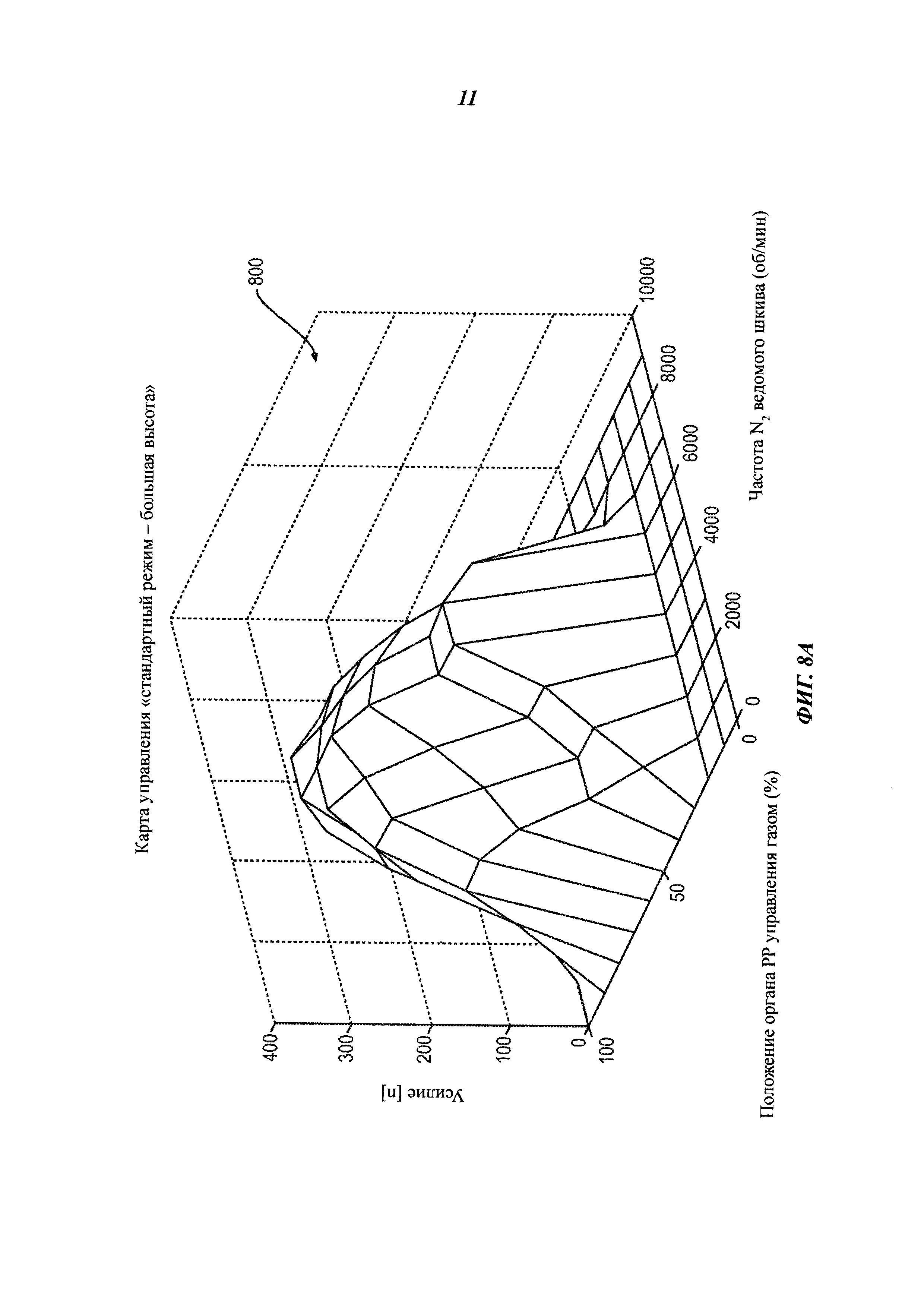
[0076] на фиг. 8А показана карта управления усилием поршня для работы в стандартном режиме на большой высоте;
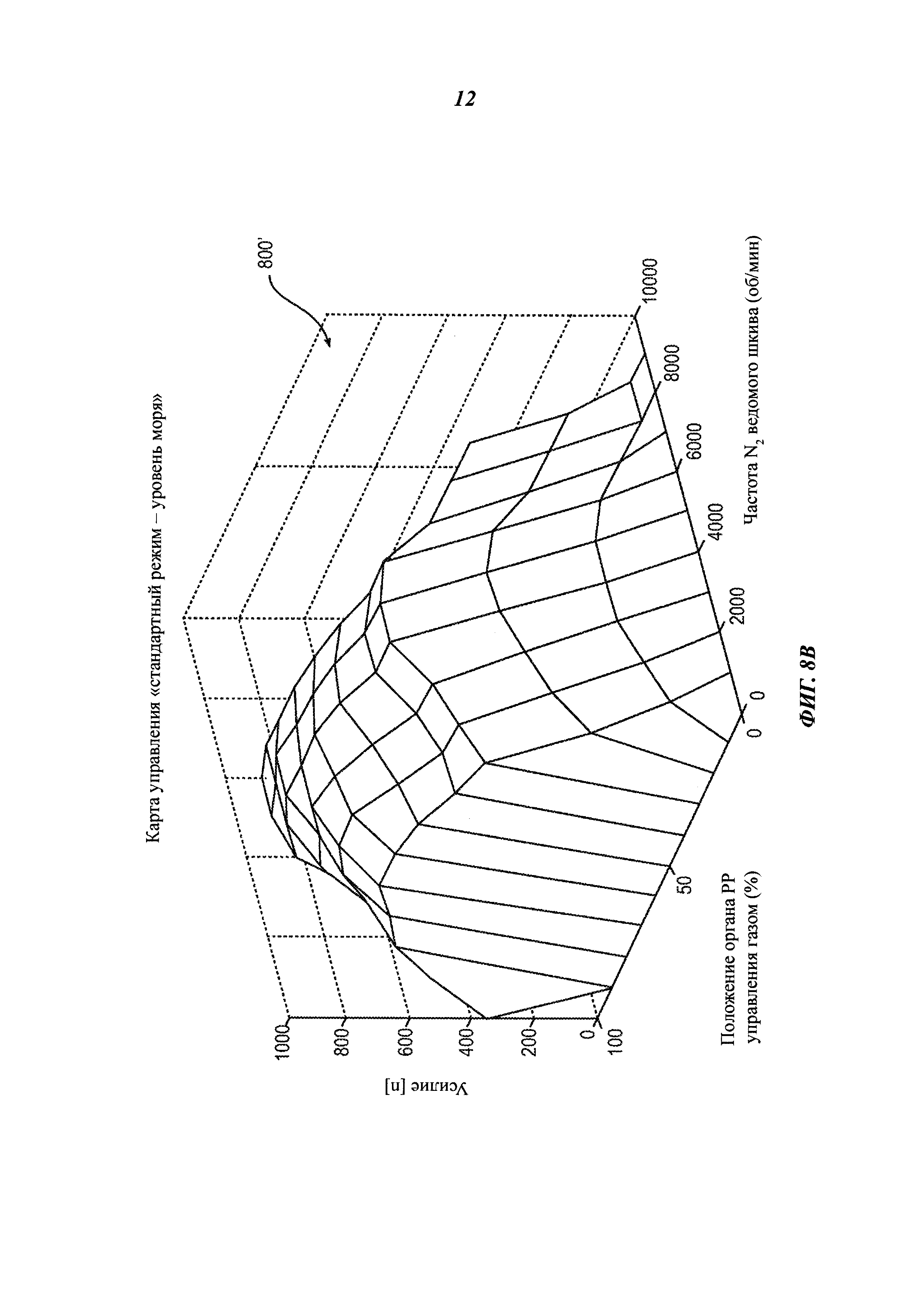
[0077] на фиг. 8В показана карта управления усилием поршня для работы в стандартном режиме на уровне моря;
[0078] на фиг. 9А показана карта управления усилием поршня для работы в экономичном режиме и на большой высоте;
[0079] на фиг. 9В показана карта управления усилием поршня для работы в экономичном режиме на уровне моря;
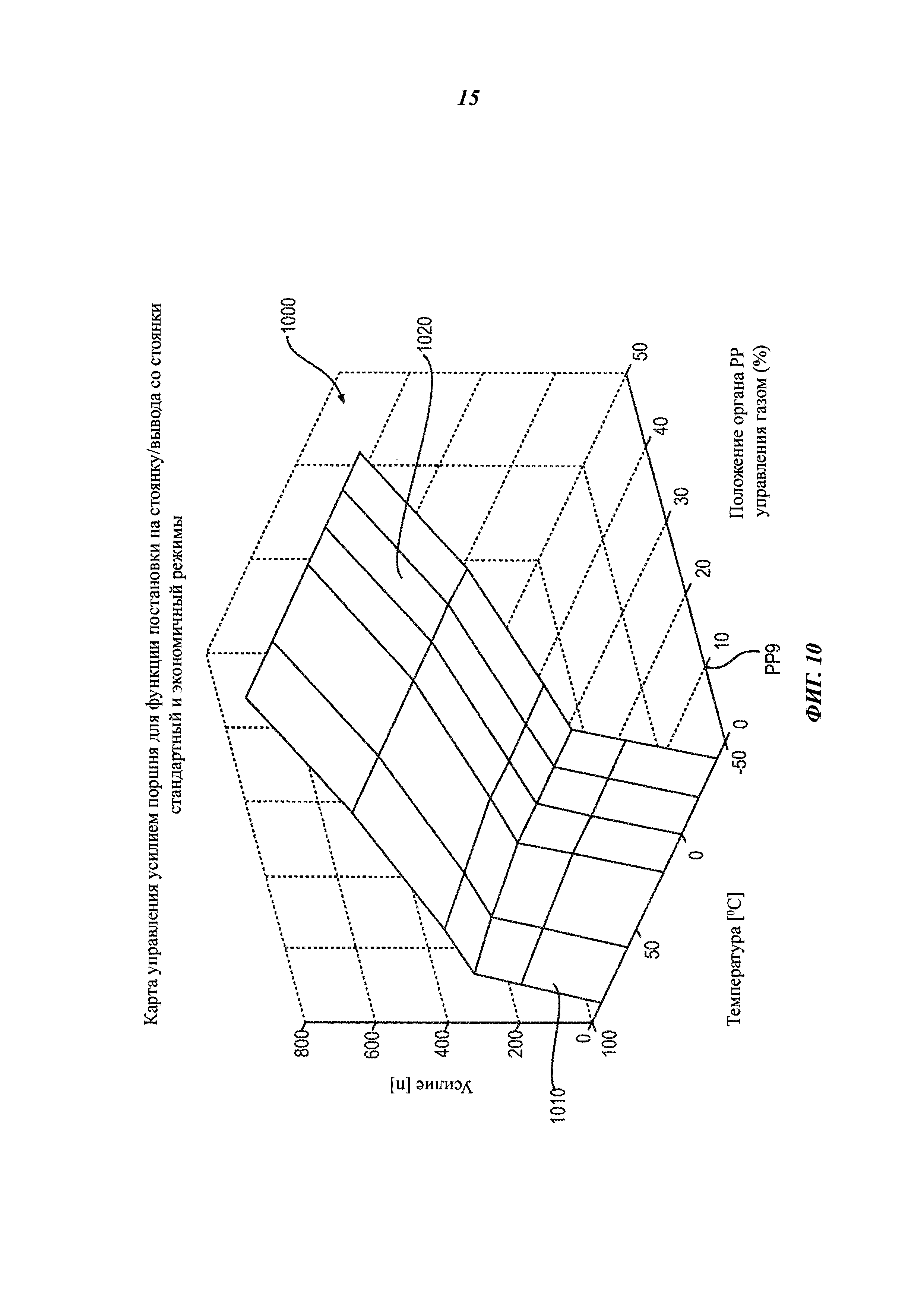
[0080] на фиг. 10 показана карта управления усилием поршня при парковании/трогании с места в стандартном и экономичном режимах, причем усилие поршня показано в виде функции положения органа управления газом и температуры двигателя;
[0081] на фиг. 11А показана карта управления минимальным усилием поршня при движении под уклон для работы в стандартном режиме; и
[0082] на фиг. 11 В показана карта управления минимальным усилием поршня при движении под уклон для работы в экономичном режиме.
Подробное раскрытие изобретения
[0083] Настоящая технология будет описана относительно снегохода. Тем не менее, подразумевается, что данная технология сможет быть использована и в других транспортных средствах, к которым, помимо прочего, можно отнести мотоцикл, трехколесное транспортное средство и автомобиль повышенной проходимости (АПП). Аспекты технологии также являются применимыми к иным, чем транспортные средства, моторизованным устройствам, использующим бесступенчатую трансмиссию (БСТ).
[0084] Показанный на фиг. 1 снегоход 10 включает в себя передний конец 12 и задний конец 14, заданные в соответствии с направлением переднего хода. Снегоход 10 имеет раму 16, включающую в себя туннель 18, часть 20 подрамника двигателя и часть 22 узла передней подвески двигателя. Туннель 18, обычно согнутый из листового металла в П-образную геометрическую форму, отходит назад вдоль продольной оси 61 снегохода 10, и спереди присоединен к части 20 подрамника двигателя. Схематически показанный на фиг. 1 двигатель 24 имеет опору на часть 20 подрамника двигателя рамы 16. Топливный бак 25, имеющий опору над туннелем 18, подает топливо в двигатель 24 для работы последнего.
[0085] Две лыжи 26, расположенные на переднем конце 12 снегохода 10, прикреплены к раме 16 посредством узла 28 передней подвески. Узел 28 передней подвески включает в себя стойки 30 лыж, несущие рычаги 32 и шаровые шарниры (не показаны) для функционального соединения соответствующих лыж 26 с рулевой колонкой 34.
[0086] Бесконечная приводная гусеница 65 расположена на заднем конце 14 снегохода 10. Приводная гусеница 65 расположена в целом под туннелем 18 и функционально соединена с двигателем 24 системой бесступенчатой трансмиссии 40 (БСТ) (на фиг. 1 показана схематично пунктирными линиями) и ведущей звездочкой (не показана). Работа двигателя 24 и БСТ 40 будет раскрыта подробнее ниже. Бесконечная приводная гусеница 65 приводится в движение, чтобы обегать вокруг узла 42 задней подвески, продвигая снегоход 10.
[0087] Узел 42 задней подвески включает в себя пару направляющих рельсов 44, находящихся в скользящем контакте с бесконечной приводной гусеницей 65. Узел 42 задней подвески также включает в себя один или несколько амортизаторов 46 и рычагов 48 и 40 подвески для прикрепления направляющих рельсов 44 к раме 16. В узле 42 задней подвески также имеется одно или несколько промежуточных колес 52.
[0088] На переднем конце 12 снегохода 10, обтекатели 54 заключают в себя двигатель 24 и БСТ 40, тем самым обеспечивая наружную оболочку, которая защищает двигатель 24 и БСТ 40. Обтекатели 54 включают в себя капот (не показан) и одну или несколько боковых панелей, которые могут быть открыты для обеспечения доступа к двигателю 24 и БСТ 40 когда это требуется, например, для осмотра или технического обслуживания двигателя 24 и/или БСТ 40. Присоединенное к обтекателям 54 лобовое стекло 56 вблизи переднего конца 12 снегохода 10 служит защитой от ветра, гася воздействие ветра на ездока в процессе движения снегохода 10.
[0089] Сиденье 58 седельного типа расположено поверх топливного бака 25, проходит назад от обтекателей 54 и предназначено для размещения водителя снегохода 10. Задняя часть сиденья 58 может включать в себя отсек для хранения, или же может быть использована для размещения пассажирского сиденья (не показано). С каждого борта снегохода имеется подножка 60, находящаяся под сиденьем 58 и предназначенная для того, чтобы водитель мог ставить на нее ноги.
[0090] Верхний конец рулевой колонки 34 прикреплен к рулевому устройству, такому как руль 36, расположенный спереди сиденья 58. Руль 36 используют для поворачивания стоек 30 лыж, и, соответственно, самих лыж 26, для изменения направления движения транспортного средства 10.
[0091] Орган 37 управления газом, выполненный в виде приводимого в действие пальцами от мизинца до указательного рычага 37 газа, установлен рядом с правой ручкой руля 36. Предусмотрено, что могут иметься другие типы органов управления газом, например, приводимый в действие большим пальцем рычаг газа и поворотная ручка. Рычаг 37 газа в нормальных условиях смещается, обычно пружиной, к положению, в котором он наиболее удален от руля 36. Это положение рычага 37 газа указывает на то, что водитель желает, чтобы двигатель 24 работал в режиме «холостой ход», как это будет раскрыто ниже. Рычаг 37 газа может быть нажат к рулю 36 для увеличения подачи воздуха в двигатель 24, чтобы тем самым увеличить выходную мощность двигателя 24 посредством системы с электронным управления (ЭУ). В предварительной заявке на патент США No. 61/666,443, поданной 29 июня 2012 года, содержание которой полностью включено в настоящий документ посредством ссылки, раскрыты дополнительные подробности систем с электронным управлением дроссельными заслонками в транспортных средствах. Положение РР органа управления газом определяется как доля от его полностью активированного положения (когда рычаг 37 газа максимально приближен к рулю 36), то есть, величина РР изменяется от 0% (неактивированное положение или положение «холостой ход») до 100% (полностью активированное положение или положение, когда рычаг 37 газа максимально приближен к рулю 36). Подразумевается, что снегоход может не иметь системы ЭУ.
[0092] Орган 38 управления тормозом, выполненный в виде приводимого в действие пальцами от мизинца до указательного рычага 38 тормоза, установлен вблизи правой ручки руля 36. Рычаг 38 тормоза соединен с тормозным диском (не показан), соединенным со звездочкой с целью торможения звездочки и, следовательно, бесконечной гусеницы 65 так, так это известно специалистам в данной области техники.
[0093] Приборная доска 64 (фиг. 3) обеспечена спереди руля 36 для визуализации адресованной водителю снегохода 10 информации, такой как скорость движения средства, частота вращения двигателя, рабочий режим транспортного средства, температура и т.п. Приборная доска 64 может включать в себя один или несколько приборов, дисплейных экранов, контрольных ламп и звуковых устройств, таких как громкоговорители, гудки и т.п.
[0094] На самом руле 62 или вблизи него обеспечен переключатель 62 режимов (смотри фиг. 3). Переключатель 62 режимов выполнен в форме тумблера, но предусмотрено, чтобы он был пользовательским органом управления, выполненным в виде нажимного кнопочного переключателя, грибка, рычажка и другого органа, установленного в приборной доске 64 или в приборах. Переключатель 62 режимов имеет положения соответствующие экономичному режиму (ЕСО), стандартному режиму (STD) и спортивному режиму (SPORT), что будет подробно раскрыто ниже. Переключатель 62 можно с фиксацией положения постепенно передвигать между положениями, соответствующими экономичному режиму, стандартному режиму и спортивному режиму. Водитель снегохода 10 выражает желание изменить рабочий режим с текущего режима СМ на требуемый режим DM работы снегохода, передвигая переключатель 62 режимов в положение, соответствующее требуемому режиму DM. Предусмотрено, что режимы работы транспортного средства могут быть привязаны к авторизации или идентификации водителя, например, информация о которых может быть закодирована в ключе, используемом для запуска транспортного средства 10. Например, различные ключи могут быть связаны с различными режимами, или же каждый из ключей может давать авторизацию для управления транспортным средством в одном или нескольких режимах. Предусмотрено, что количество и наименования режимов работы могут отличаться от описываемых здесь.
[0095] Двигатель 24 является двигателем внутреннего сгорания. Внутренняя конструкция двигателя 24 может быть любого известного типа и может работать в двухтактном или четырехтактном цикле. Двигатель 24 приводит в движение коленчатый вал 57 (фиг. 4А), вращающийся вокруг горизонтально расположенной оси 85 (фиг. 4А), проходящей в общем поперек продольной оси 61 снегохода 10. Коленчатый вал 57 приводит в движение БСТ 40, как подробно раскрыто ниже, для того, чтобы передавать крутящий момент бесконечной приводной гусенице 65 для продвижения снегохода 10.
[0096] На фиг. 2А схематически показана силовой агрегат 75 снегохода 10. Силовой агрегат 75 включает в себя двигатель 24, БСТ 40 и редукторный привод 78 с постоянным передаточным отношением. БСТ 40 включает в себя ведущий шкив 80, связанный для вращения непосредственно с коленчатым валом 57 двигателя, и ведомый шкив 88, связанный с одним концом промежуточного вала 92, расположенного поперечно и имеющего опору в подшипниках рамы 16. Как показано, промежуточный вал 92 поперечного расположения пересекает ширину двигателя 24. Противоположный конец промежуточного вала 92 поперечного расположения соединен с входным элементом редукторного привода 78, а выходной элемент редукторного привода 78 соединен с приводной осью 90, несущей зубчатые колеса (не показаны), формирующие приводное соединение с приводной гусеницей 65. Обычно, входной элемент редукторного привода 78 состоит из малой звездочки, соединенной с поперечным промежуточным валом 92 и связанной для приведения в движение с выходным элементом, состоящим из большей звездочки, соединенной с приводной осью 90 через приводную цепь, причем все это заключено внутри кожуха редукторного привода 78.
[0097] В данном конкретном примере ведущий шкив 80 вращается с той же самой частотой ES, что и коленчатый вал 57 двигателя 24, в то время как частота вращения поперечного промежуточного вала 92 определяется в соответствии с мгновенным значением передаточного отношения БСТ 40. Приводная ось 90 вращается с частотой, меньшей частоты вращения поперечного промежуточного вала 92 в результате действия редукторного привода 78. Предусмотрено, что ведущий шкив 80 может быть связан с валом двигателя, другим, чем коленчатый вал 57, например, с выходным валом, уравновешивающим валом или с валом отбора мощности, приводимым в движение двигателем 24 и отходящим от него. Аналогичным образом предусмотрено, что ведомый шкив 88 может быть связан с валом, иным, чем поперечный промежуточный вал 92, например, непосредственно с приводной осью 90 или любым другим валом, функционально связанным с контактирующим с грунтом элементом снегохода (то есть, с приводной гусеницей 65 в случае снегохода 10).
[0098] Ведущий шкив 80 БСТ 40 включает в себя пару противолежащих и имеющих форму усеченного конуса дисков 82 и 84, между которыми удерживается элемент 86 бесконечного ремня. Ведущий шкив 80 подробно будет раскрыт ниже. Ведомый шкив 88 БСТ 40 включает в себя пару противолежащих и имеющих форму усеченного конуса дисков 87 и 89, удерживающих элемент 86 бесконечного ремня.
[0099] Передаточное отношение БСТ 40 задается как отношение эффективного диаметра D2 ведомого шкива 88 к эффективному диаметру D1 ведущего шкива 80. Эффективные диаметры D1 и D2 шкивов 80, 88 определяются радиальным положением ремня 86, удерживаемого между двумя парами дисков - 82, 84 и 87, 89 соответствующих шкивов 80, 88. Радиальное положение ремня 86, удерживаемого между двумя дисками 82 и 84 и 87 и 89, изменяется вместе с расстоянием между дисками 82 и 84 и 87 и 89. Так как длина ремня 86 остается постоянной, то эффективные диаметры D1, D2 ведущего и ведомого шкивов 80 и 88 обратно пропорциональны друг другу. Когда ремень 86 смещается на ведущем шкиве 80 радиально наружу (то есть, когда диски 82 и 84 ведущего шкива сходятся друг с другом), увеличивая при этом эффективный диаметр D1 ведущего шкива 80, тогда ремню 86 приходится на ведомом шкиве 88 смещаться радиально внутрь (то есть диски 87 и 89 ведомого шкива расходятся друг от друга), тем самым уменьшая эффективный диаметр D2 ведомого шкива 88 и изменяя передаточное отношение БСТ.
[00100] Диски 82, 84 ведущего шкива разведены друг от друга таким образом, что когда они не вращаются, диски 82, 84 ведущего шкива находятся на расстоянии друг от друга и ремень 86 выведен из зацепления с ведущим шкивом 80. Подвижный диск движется в ответ на изменение частоты ES вращения двигателя. Эффективные диаметры D1, D2 шкивов 80, 88 обратно пропорциональны друг другу. Когда коленчатый вал 57 и диски 82, 84 ведущего шкива начинают вращаться с увеличивающейся частотой ES вращения, диски 82, 84 сходятся друг к другу за счет воздействия набора центробежных грузов, который толкает подвижный диск к неподвижному диску. При определенной частоте ES вращения двигателя диски 82, 84 ведущего шкива входят в зацепление с ремнем 86, который в свою очередь начинает вращать диски 87, 89 ведомого шкива. Частота ES вращения (коленчатого вала 57 и дисков 82, 84 ведущего шкива), при которой диски 82, 84 ведущего шкива входят в зацепление с ремнем 86, называется оборотами ESengage сцепления.
[00101] При частотах ES вращения, превышающих обороты ESengage сцепления, двигатель 24 функционально соединяется через БСТ 40 с гусеницей 65. При частотах ES, меньших оборотов ESengage сцепления, БСТ 40 расцеплена, то есть силовой агрегат 75 не может передавать крутящий момент и мощность от двигателя 24 к гусенице 65. То есть, при этом снегоход 10 не приводится в движение двигателем 24, и при частотах вращения, меньших оборотов ESengage двигатель 24 работает на холостом ходу. Работа двигателя 24 на холостом ходу позволяет обеспечивать мощностью такие системы транспортного средства, как дисплеи 64, электронный блок управления (ЭБУ) 200 и т.п. Двигатель 24 может быть переведен на работу на холостом ходу отпусканием рычага 37 газа без отключения двигателя 24. Включение и отключение двигателя 24 обычно выполняется вставлением ключа (механического и/или электронного) в ключеприемник или задействованием выключателя.
[00102] Двигатель 24 через коленчатый вал 57 передает крутящий момент ведущему шкиву 80 для вращения последнего. Управление расстоянием между дисками 82 и 85 ведущего шкива и эффективным диаметром ведущего шкива 80 выполняют с помощью регулировочного механизма, который подробно будет раскрыт ниже. Ремень 86 зацепляется дисками 82, 84 ведущего шкива согласно вышеприведенному описанию. Ремень, в свою очередь, зацепляет ведомый шкив 88, вращая диски 87 и 89 и изменяя расстояние между ними и эффективный диаметр D2 ведомого шкива 88 согласно вышеприведенному описанию. Тем самым крутящий момент от двигателя 24 передается ведущему шкиву 80, ремню 86, ведомому шкиву 88 и, наконец, приводной оси 90.
[00103] При высоком передаточном отношении БСТ (пониженная передача), ведущий шкив 80 совершает несколько оборотов за один оборот ведомого шкива 88. Такая конфигурация требуется в определенных ситуациях, например, при разгоне снегохода 10, когда требуется передать большой крутящий момент ведущему шкиву 88 и, соответственно, приводной оси 90.
[00104] При низком передаточном отношении БСТ (повышенная передача), за один оборот ведущего шкива 80 ведомый шкив 88 совершает один оборот. Такая конфигурация требуется в определенных ситуациях, например, при вождении снегохода на постоянных и высоких скоростях движения.
[00105] Двигатель 24 является рядным двухцилиндровым четырехтактным двигателем внутреннего сгорания. Тем не менее, предусмотрено, что конструкция двигателя 24 может быть любой конструкцией известного типа. Двигатель 24 получает топливо из топливного бака 25 посредством системы 76 впрыска топлива (фиг. 3). Двигатель 24 получает воздух из воздухозаборной системы 66 (фиг. 2 В) через корпус 68 дроссельной заслонки. Воспламенение топливовоздушной смеси в двигателе 24 осуществляется системой 74 зажигания. Выходная мощность Р двигателя, крутящий момент τ, и частота ES вращения двигателя отчасти определяются качеством топливовоздушной смеси в двигателе и установкой IT момента зажигания. С целью охлаждения двигателя 24 в процессе его работы он сообщается по текучей среде с системой 284 охлаждения. Электронный блок управления (ЭБУ) 200 функционально подключен к двигателю 24 для управления работой двигателя 24 согласно нижеследующему описанию.
[00106] Как показано на фиг. 2 В, корпус 68 дроссельной заслонки содержит дроссельную заслонку 70, которая регулирует количество воздуха, протекающего через корпус 68 дроссельной заслонки и входящего в двигатель 24. Дроссельная заслонка 70 представляет собой дисковую заслонку, содержащую установленный внутри трубчатого корпуса 68 круглый диск, вращающийся на стержне, проходящем диаметрально через диск. Вращающийся на стержне диск в изменяемой степени препятствует прохождению воздуха через трубчатый корпус 68 дроссельной заслонки. Дроссельная заслонка 70 находится в своем полностью открытом положении (минимальное препятствование протеканию потока воздуха), когда круглая поверхность диска находится под минимальным углом к центральной оси трубчатого корпуса 68, и находится в своем полностью закрытом положении (максимальное препятствование протеканию потока воздуха), когда круглая поверхность диска находится под максимальным углом к центральной оси трубчатого корпуса 68 дроссельной заслонки. Исполнительное устройство 72 дроссельной заслонки, выполненное в виде электрического мотора, функционально соединено с диском для изменения положения последнего, чтоб тем самым регулировать степень открытия дроссельной заслонки 70. Положение TVP дроссельной заслонки может быть задано в терминах степени открытия дроссельной заслонки 70. Положение TVP дроссельной заслонки определяют как долю от ее полностью открытого положения, и поэтому TVP может изменяться от 0% (полностью закрытое положение) до 100% (полностью открытое положение). Датчик 206 дроссельной заслонки подключен к дроссельной заслонке 70 и измеряет ее положение TVP. Исполнительное устройство 72 дроссельной заслонки располагает дроссельную заслонку 70 отчасти в зависимости от положения РР рычага 37 газа снегохода. Как было отмечено выше, снегоход 10 оснащен системой электронного управления (ЭУ), в которой управление дроссельной заслонкой 70 выполняют электронным образом, вместо того, чтобы иметь механическую проводку между рычагом 37 газа и дроссельной заслонкой 70. Положение РР рычага газа 37 отслеживается посредством датчика 204 положения органа управления газом. Управление исполнительным устройством 72 осуществляют отчасти на основании сигналов, принимаемых от ЭБУ 200 согласно описанию, приведенному ниже.
[00107] Как показано на фиг. 2В и фиг. 3, ЭБУ 200 электронно сообщается с разнообразными датчиками, от которых он принимает сигналы. Эти сигналы ЭБУ 200 использует для управления исполнительным устройством 72 дроссельной заслонки, системой 74 зажигания и системой 76 впрыска топлива в случае двигателя с впрыском топлива, для того, чтобы управлять работой двигателя 24. Способы, посредством которых ЭБУ 200 управляет двигателем 24, подробно раскрываются ниже.
[00108] Специалистам в данной области техники должно быть понятно, что не все показанные на фиг. 3 датчики или компоненты требуются для достижения аспектов настоящего изобретения. Специалисты в данной области техники должны также понимать, что, в зависимости от конкретного аспекта изобретения, некоторых датчиков и компонентов может не иметься, некоторые датчики и компоненты могут быть заменены датчиками и компонентами других типов, а два или несколько датчиков могут быть совмещены в одном датчике, который можно использовать для выполнения многих функций в пределах объема настоящей технологии.
[00109] Датчик 204 положения органа управления газом измеряет положение РР органа 37 управления газом (в иллюстрируемом варианте осуществления снегохода 10 - рычага 37 газа, приводимого в движение пальцами от указательного до мизинца или большим пальцем руки) и посылает на ЭБУ 200 сигнал, содержащий информацию о положении РР органа управления газом. В зависимости от типа органа управления газом, датчик 204 положения органа управления газа обычно располагается вблизи органа 37 управления газом и измеряет движение органа 37 управления газом или линейное смещение тросика, соединенного с органом 37 управления газом.
[00110] ЭБУ 200 посылает сигнал на исполнительное устройство 72 дроссельной заслонки для регулирования положения TVP, то есть, степени открытия дроссельной заслонки 70 внутри корпуса 68 дроссельной заслонки. Положение TVP дроссельное заслонки регулируют отчасти в зависимости от положения РР органа управления газом, а также в зависимости от других факторов, таких как установка IT момента зажигания, требуемые выходные мощность и крутящий момент τ, текущий рабочий режим СМ и т.п.
[00111] Датчик 206 положения дроссельной заслонки измеряет положение (то есть, степень открытия) дроссельной заслонки 70 и посылает сигнал, содержащий информацию о положении TVP дроссельной заслонки 70 на ЭБУ 200. Датчик 206 положения дроссельной заслонки действует в качестве источника обратной связи для ЭБУ 200, так как ЭБУ 200 использует сигнал, полученный от датчика 206 положения дроссельной заслонки для того, чтобы определить, переместило ли исполнительное устройство 214 дроссельную заслонку 37 в нужное положение, и выполнить соответствующие регулировки. Датчик 206 положения дроссельной заслонки может быть датчиком любого типа, например, реостатным, на эффекте Холла, потенциометрическим и т.п.В зависимости от типа используемого исполнительного устройства 72 дроссельной заслонки, отдельного датчика 206 положения дроссельной заслонки может и не требоваться. Например, отдельного датчика 206 положения дроссельной заслонки может не понадобиться, если исполнительное устройство 72 дроссельной заслонки будет сервомотором, как так в сервомоторах встроена своя собственная цепь обратной связи, корректирующая положение мотора и для этого имеющая встроенный датчик 206 положения дроссельной заслонки.
[00112] Датчик 208 частоты вращения двигателя измеряет частоту ES вращения двигателя 24 и посылает сигнал, содержащий информацию о частоте ES вращения двигателя 24 на ЭБУ 200. Датчик 208 частоты вращения двигателя является датчиком Холла, связанным с триггерным колесом на выходном валу двигателя. Предусмотрено, что датчик 208 частоты вращения двигателя может быть связан с любым вращающимся валом двигателя, например, с коленчатым валом. Частота ES вращения двигателя 24 может использоваться ЭБУ 200 для расчета крутящего момента т двигателя и выходной мощности Р двигателя 24.
[00113] Датчик 210 переключателя режимов измеряет положение или движение переключателя 62 режимов и посылает на ЭБУ 200 сигнал, содержащий информацию о требуемом рабочем режиме DM (также называемом здесь выбранным рабочим режимом транспортного средства). В некоторых вариантах осуществления датчик 210 переключателя режимов выполнен с возможностью измерения положения переключателя 62 режимов, а ЭБУ 200 определяет соответствующий требуемый рабочий режим по сигналу, полученному от переключателя 210 режимов. В некоторых вариантах осуществления, датчик 210 переключателя режимов выполнен с возможностью измерения движения переключателя 62 режимов, включая количество шагов движения (один или два шага в иллюстрируемом варианте осуществления) и направление движения («вверх» или «вниз»). Датчик 210 переключателя режимов посылает на ЭБУ 200 сигнал, содержащий информацию об указанном движении, а ЭБУ 200 определяет требуемый рабочий режим DM по текущему рабочему режиму СМ и по принятой информации о движении переключателя 62 режимов.
[00114] Датчик 202 скорости транспортного средства измеряет скорость VS снегохода 10 и посылает сигнал, содержащий информацию о скорости VS снегохода 10 на приборную доску 64. Предусмотрено, что датчик 202 скорости транспортного средства также может посылать сигнал, содержащий информацию о скорости VS снегохода, на ЭБУ 200. Датчик 202 скорости транспортного средства является датчиком Холла, связанным с триггерным колесом на приводном валу, например, на приводной оси 90 таким образом, чтобы измерять частоту вращения последней. Предусмотрено, что для определения скорости снегохода 10 датчик 202 скорости транспортного средства может измерять частоту вращения любого вала, приводимого в движение ведомым шкивом 88 (то есть, любого вала, соединенного между ведомым шкивом 88 и гусеницей 65), включая валы внутри редукционного привода 78. Предусмотрено использование любого подходящего по типу датчика 202 скорости транспортного средства. Альтернативно, датчик 202 скорости транспортного средства может включать в себя модуль системы GPS глобального позиционирования. С использованием информации от модуля GPS скорость транспортного средства 10 можно определить, рассчитав изменение местоположения транспортного средства 10 за некоторый период времени, что обычно является функцией модуля GPS.
[00115] Датчик 203 частоты вращения ведомого шкива измеряет частоту N2 ведомого шкива 88 и посылает сигнал, содержащий информацию о частоте N2 на ЭБУ 200. Датчик 203 частоты вращения ведомого шкива является датчиком Холла, связанным с промежуточным валом 92 таким образом, чтобы измерять частоту вращения последнего.
[00116] Датчик 205 высоты, которым снабжено транспортное средство 10, определяет высоту, на которой работает транспортное средство 10, и отсылает сигнал на ЭБУ. Датчик высоты в иллюстрируемом варианте осуществления является датчиком давления воздуха (или барометром), измеряющим атмосферное давление вблизи транспортного средства 10, и в зависимости от измеренного атмосферного давления определяющим высоту. Предусмотрено, чтобы датчик 205 был высотомером. Предусмотрено, что датчик 205 высоты может быть частью упомянутого выше модуля GPS.
[00117] Датчик 280 уклона, которым оснащено транспортное средство 10, предназначен для измерения уклона дороги, на которой работает транспортное средство. Предусмотрено, что датчик 280 уклона может быть частью упомянутого выше модуля GPS.
[00118] ЭБУ 200 присоединен к системе 74 зажигания для того, чтобы управлять воспламенением топливовоздушной смеси в камере сгорания двигателя 24. Например, ЭБУ 200 управляет установкой IT момента зажигания отчасти в зависимости от положения TVP дроссельной заслонки, в зависимости от положения РР органа управления газом и/или частоты ES вращения двигателя. ЭБУ 200 также подсоединен к системе 76 впрыска топлива для того, чтобы управлять впрыском топлива в двигатель 24. ЭБУ подключен к датчику 288 температуры хладагента двигателя для отслеживания температуры хладагента двигателя, текущего через систему 284 охлаждения двигателя, чтобы тем самым контролировать рабочую температуру ТЕ двигателя 24.
[00119] ЭБУ 200 подключен к приборной доске 64 с целью управления визуализацией информации на ней. ЭБУ 200 посылает сигналы на приборную доску 64 для визуализации информации о частоте вращения двигателя и скорости транспортного средства, а также выбранного рабочего режима.
[00120] Предусмотрено, что ЭБУ 200 может быть разделен на множество блоков, каждый из которых наделен одной или несколькими функциями из раскрытых выше или ниже.
[00121] ЭБУ 200 управляет работой двигателя 24, по меньшей мере, частично, на основании сигналов, получаемых от датчиков 202, 203, 204, 205, 206, 208, 210, и в зависимости от конкретной схемы или карты управления, используемых ЭБУ 200. Карты управления обеспечивают информацию, относящуюся к разнообразным параметрам (например, положению TVP дроссельной заслонки, положению РР органа управления газом, впрыску топлива, установке IT момента зажигания, крутящему моменту двигателя, выходной мощности и т.п.), необходимым для эксплуатации двигателя 24. Например, карта управления может обеспечивать информацию о требуемом изменении положения дроссельной заслонки и частоты вращения двигателя для достижения конкретной выходной мощности или крутящего момента двигателя. ЭБУ 200 для определения некоторых из параметров также может использовать алгоритмы, дополняющие карты управления.
[00122] Снегоход 10, как было указано выше, можно эксплуатировать в разных рабочих режимах (в иллюстрируемых вариантах осуществления это следующие режимы: спортивный, стандартный и экономичный). Некоторые из карт управления, используемых ЭБУ 200, являются специализированными для каждого рабочего режима и указывают вариации параметров двигателя, требующиеся для работы в данном режиме.
[00123] Как видно на фиг. 2С, для различных рабочих режимов отклик дроссельной заслонки (то есть, зависимость положения TVP дроссельной заслонки от положения РР органа управления газом) для различных рабочих режимов разная. Как было указано выше, положение TVP дроссельной заслонки определяется как доля от ее полностью открытого положения, и поэтому TVP может изменяться от 0% (полностью закрытое положение) до 100% (полностью открытое положение). Положение РР органа управления газом также определяется как доля от его полностью активированного положения и соответственно варьируется от 0% (незадействованное положение или положение холостого хода) до 100% (полностью активированное положение).
[00124] При увеличении значения РР положения органа управления газом от 0% до 100%, соответствующее значение TVP положения дроссельной заслонки в каждом режиме увеличивается от минимального для данного режима значения до максимального для данного режима значения. Для всех режимов минимальное значение положения TVP дроссельной заслонки, соответствующее 0% значению положения РР органа управления газом, является значением, большим нуля. Минимальное значение положения TVP дроссельной заслонки соответствует положению ITVP дроссельной заслонки для холостого хода, и его устанавливают на значение, превышающее нуль, чтобы обеспечить в данном режиме работу на холостом ходу.
[00125] Видно, что для любого конкретного положения РР органа управления газом, соответствующее положение TVP дроссельной заслонки в экономичном режиме меньше соответствующих положений TVP дроссельной заслонки в спортивном и стандартном режимах. Кроме того, для любого конкретного положения РР органа управления газом, отличающегося от 100%, положение TVP дроссельной заслонки в спортивном режиме больше соответствующего положения TVP дроссельной заслонки в стандартном режиме. При положении РР органа управления газом, равном 100%, положения TVP дроссельной заслонки в спортивном и стандартном режимах одинаковы.
[00126] В иллюстрируемом варианте осуществления, максимальное положение TVP дроссельной заслонки в спортивном и стандартном режимах устанавливают на полностью открытое положение (то есть, на 100%), в то время как в экономичном режиме максимальное положение TVP дроссельной заслонки ограничивают 50% полностью открытого положения. Предусмотрено, что максимальное положение TVP дроссельной заслонки в стандартном режиме может быть меньшим такового положения в спортивном режиме таким образом, что каждый из трех режимов будет иметь свое собственное значение максимального положения TVP дроссельной заслонки. Предусмотрено также, что максимальное значение положения TVP дроссельной заслонки в стандартном режиме может быть таким же, как в экономичном режиме. В иллюстрируемом варианте осуществления, для каждого из трех режимов максимальное значение положения TVP дроссельной заслонки достигается, когда педаль 37 газа находится в своем максимальном, равном 100%, положении РР органа управления газом. Предусмотрено, что максимальное значение положения TVP может достигаться при значении положения РР органа управления газом, меньшем 100%.
[00127] Двигатель 24 снегохода 10 способен производить определенную максимальную выходную мощность, определяемую его рабочим объемом, как это будет понятно специалисту в данной области техники. Мощность Р, вырабатываемая двигателем в каждый конкретный момент времени, является функцией некоторых параметров, среди которых можно назвать положение TVP дроссельной заслонки, установку IT момента зажигания и впрыск топлива. ЭБУ 200 управляет работой двигателя 24 таким образом, что выходная мощность Р, вырабатываемая двигателем 24, также зависит от текущего рабочего режима СМ. Например, в экономичном режиме выходная мощность Р, вырабатываемая двигателем 24, ограничена максимальным значением, составляющим примерно 50% от максимальной выходной мощности, доступной от двигателя 24.
[00128] Также предусмотрено, чтобы скорость транспортного средства была ограничена в одном из режимов, например, для повышения топливной экономичности скорость транспортного средства можно ограничивать в экономичном режиме.
[00129] Далее со ссылкой на фиг. 4А и 4 В подробно рассматривается ведущий шкив 80.
[00130] Как было рассмотрено выше, ведущий шкив 80 содержит пару дисков 82 и 84, которые оба вращаются вместе с коленчатым валом 57 вокруг оси 85 вращения ведущего шкива 80. В применении к ведущему шкиву термином «аксиальное направление» обозначается направление, параллельное оси 85 вращения.
[00131] И внутренний, и наружный диски 82 и 84 имеют контактирующую с ремнем поверхность 83. Ремень 86 удерживается контактирующей с ремнем поверхностью 83 ведущих дисков 82 и 84. Внутренний диск 82, расположенный между наружным диском 84 и двигателем 24, зафиксирован в аксиальном направлении, и поэтому называется неподвижным диском 82. Наружный диск 84 можно приближать к неподвижному диску 82 или удалять от него в аксиальном направлении с целью изменения передаточного отношения БСТ 40, и поэтому диск 84 называется подвижным. Предусмотрено подвижность в аксиальном направлении обоих дисков 82 и 84.
[00132] Диски 82, 84 ведущего шкива 80 установлены на приводном валу 100, вращательно связанном с коленчатым валом 57. Часть 101 приводного вала 100 установлена с посадкой на конус на торце коленчатого вала 57. На конце, противоположном части 101, в приводной вал 100 вставлен болт 102 и вкручен в торец коленчатого вала для скрепления приводного вала 100 с коленчатым валом 57. Предусмотрено, чтобы приводной вал 100 был с возможностью вращения связан с коленчатым валом 57 другими известными методами. Например, приводной вал 100 можно скреплять с коленчатым валом 57 посредством шпонок.
[00133] Неподвижный диск 82 с натягом установлен на внутреннем конце приводного вала 100, чтобы вращаться вместе с ним и быть неподвижным в аксиальном направлении.
[00134] Подвижный диск 84 установлен на приводном валу 100 аксиально снаружи неподвижного диска 82. Подвижный диск 84 установлен на приводном валу 100 на опорных втулках 104, чтобы иметь возможность скользить в аксиальном направлении.
[00135] Кольцевая камера 110 для пружины, коаксиальная с приводным валом 100, образована между подвижным диском 84 и приводным валом 100. Внутри камеры 110 для пружины расположена спиральная нажимная пружина 116, коаксиальная с приводным валом 100. Буртик 112, отходящий радиально наружу от внешней поверхности приводного вала 100 в камеру 110 для пружины, образует стопор пружины. Пружина 116 удерживается в камере 110 для пружины между аксиально неподвижным стопором 112 пружины и аксиально подвижной наружной стенкой 114, образованной частью подвижного диска 84. В такой конфигурации пружина 116 отодвигает подвижный диск 84 от неподвижного диска 82.
[00136] Предусмотрено, чтобы пружина 116 удерживалась между частью неподвижного диска 82 и частью подвижного диска 84, или элементом, неподвижно соединенным со скользящим подвижным диском 84. Также предусмотрено, чтобы пружина 116 могла удерживаться между частью подвижного диска 84 и аксиально неподвижной частью ведущего шкива, иной, чем буртик 112, если аксиально неподвижная часть будет располагаться аксиально внутри части подвижного диска 84.
[00137] Множество центробежных грузов 120 установлены на наружной поверхности подвижного диска 84. В иллюстрируемом варианте осуществления, центробежные грузы выполнены в виде маховиков или рычагов 120, у которых один конец 121 прикреплен к наружной поверхности подвижного диска 84, а другой конец 122 может свободно шарнирно отклоняться от подвижного диска 84. При нахождении подвижного диска 84 в покое, свободный конец 122 центробежных рычагов 120 покоится на его наружной поверхности. При увеличении частоты вращения подвижного диска 84, свободный конец 122 шарнирно отклоняется от подвижного диска 84 радиально наружу относительно приводного вала 100.
[00138] Крестовина 90 и крышка 92 установлены на приводном валу 100 аксиально снаружи подвижного диска 84 с возможностью вращения вместе с приводным валом 100. Крышка 92 притягивается к приводному валу 100 болтом 102, скрепляющим приводной вал 100 с коленчатым валом 57. Крестовина 90 крепится к крышке 92 болтами, вставляемыми в отверстия 126 у наружного края. Крестовина 90 и крышка 92, таким образом, вращаются с приводным валом 100.
[00139] Крестовина 90 имеет цилиндрическую ступицу 124, проходящую коаксиально вокруг приводного вала 100 и отделенную от него. Крестовина 90 имеет шесть пар буртиков 128, отходящих внутрь по направлению к подвижному диску 84. Шесть пар буртиков 128 радиально распределены по наружному краю. Каждая пара буртиков 128 имеет по ролику 130, с возможностью вращения установленному между их концами. Каждый из роликов 130 находится в контакте с одним соответствующим центробежным рычагом 120 подвижного диска 84. Пары буртиков 128 также входят в зацепление с ответными буртиками 129 на подвижном диске 84 так, что подвижный диск 84 вращается вместе с крестовиной 90, то есть, и с приводным валом 100 вокруг оси 85. Каждый ответный буртик 129 подвижного диска 84 принимается в пространство между соседними парами буртиков 128 крестовины 90.
[00140] Крестовина 90 выполнена из алюминия. Предусмотрено, чтобы крестовина 90 была выполнена из других пригодных материалов. Крестовина 90 имеет множество апертур 140, сформированных радиально наружно относительно ступицы 124 и между парами буртиков 128. Наличие апертур 140 способствует снижению веса. Предусмотрено, чтобы апертуры 140 отсутствовали.
[00141] Крышка 92 выполнена из алюминия. Предусмотрено, чтобы крышка 92 была выполнена из других пригодных материалов. Некоторое количество полостей 138 сформированы в поверхности крышки 92, обращенной в направлении от подвижного диска 84. Полости 138 формируют с целью снижения веса. Предусмотрено, чтобы полости 138 отсутствовали.
[00142] При низкой рабочей частоте (об/мин) вращения двигателя, неподвижный диск 82 и подвижный диск 84 ведущего шкива 80 располагаются так, как это показано на фиг. 4А. При высоких частотах вращения двигателя диски 82 и 84 располагаются так, как это показано на фиг. 4В. Центробежные грузы 120, с помощью которых можно изменять конфигурацию, являются частью регулировочного механизма для регулирования передаточного отношения БСТ.
[00143] Как показано на фиг. 4А, когда приводной вал 100, то есть, и подвижный диск 84 и крестовина 90 находятся в покое, подвижный диск 84 находится на приводном валу 100 в своем максимально наружном положении и на максимальном удалении от неподвижного диска 82. В такой конфигурации ролики 130 крестовины 90 находятся в контакте с рычагами 120 вблизи несвободного конца 121, прикрепленного к подвижному диску 184.
[00144] При увеличении частоты вращения подвижного диска 84, свободный конец 122 рычагов 120 идет наружу, нажимая на ролики 130, и толкая подвижный диск 84 от крестовины 90 к неподвижному диску 82. Точка контакта рычага 120 с роликом 130 перемещается от несвободного конца 121, прикрепленного к подвижному диску 84, по направлению к свободному концу 122 рычага 120.
[00145] Как показано на фиг. 4В, когда подвижный диск 84 находится на приводном валу 100 в своем максимально внутреннем положении, и в своем положении, ближайшем к неподвижному диску 82, свободные концы 122 рычагов 120 находятся в контакте с роликами 130 крестовины 90. Такая конфигурация ведущего шкива 80 достигается при высоких частотах вращения приводного вала 100.
[00146] Предусмотрено, что центробежные грузы 120 могут быть прикреплены к крестовине 90 таким образом, чтобы находиться в контакте с подвижным диском 90, и отталкивать подвижный диск 84 от крестовины 90 при повышении частоты вращения крестовины 90. Также допустимо, чтобы центробежные грузы могли быть в форме роликовых грузов, при увеличении частоты вращения ведущего шкива 80 катящихся радиально наружу. В таком варианте осуществления, поверхности, контактирующие с роликовыми грузами наклонены таким образом, чтобы роликовые грузы могли отталкивать подвижный диск от крестовины 90.
[00147] Когда подвижный диск 84 толкается к неподвижному диску 82, сжатая пружина 116 прилагает к подвижному диску 84 усилие для отвода его от неподвижного диска 82, то есть, в направлении, обратном направлению действия усилия, прилагаемого к подвижному диску 84 центробежными грузами 120. Баланс этих противонаправленных усилий отчасти определяет аксиальное положение подвижного диска 84. Таким образом, центробежные грузы 120 представляют собой механическую часть механизма регулировки передаточного отношения БСТ.
[00148] Поршень 94 с возможностью скольжения установлен на приводном валу 100, аксиально внутренне относительно крышки 92 и внутри цилиндрической ступицы 124 крестовины 90. Поршень 94 изолирован от внешней поверхности приводного вала 100 уплотнением 131, принимаемым в канавке, сформированной во внутренней цилиндрической поверхности поршня 94. Поршень изолирован от внутренней поверхности цилиндрической ступицы 124 уплотнением 133, принимаемым в канавке, сформированной во внешней цилиндрической поверхности поршня 94. Тем самым, цилиндрическая ступица 124 образует цилиндр для поршня 94. Для упрощения изложения, цилиндрическая ступица 124 здесь и далее будет называться цилиндром 124. Поршень 94 отодвигается от крышки 92 за счет заполнения пространства между поршнем 94 и крышкой 92 воздухом под давлением, что будет раскрыто ниже.
[00149] В данном варианте осуществления, находящийся в неподвижном состоянии подвижный диск 84 (то есть, подвижный диск 84 в своем максимально наружном аксиальном положении) упирается в поршень 94, когда последний не приведен в действие, как показано в конфигурации, показанной на фиг. 4А. Допустимо, чтобы обездвиженный подвижный диск 84 мог находиться на расстоянии от поршня 94, не приведенного в действие. Также предусмотрено, что поршень может быть присоединен к подвижному диску 84, чтобы скользить и вращаться вместе с подвижным диском 84. Предусмотрено, чтобы поршень мог располагаться в цилиндре, который не является частью крестовины 90. Также предусмотрено, чтобы поршень 94 мог иметь геометрическую форму, отличающуюся от показанной здесь. Предусмотрено, что для приложения усилия к подвижному диску может быть обеспечено множество поршней с соответствующим количеством цилиндров.
[00150] Коннектор 96, установленный на крышке 92, соединяет воздуховод 98 с внутренностью цилиндра 124 через воздушные каналы 93, сформированные в крышке 92. Коннектор 96 вращается вместе с крышкой 92, а воздуховод 98 является стационарным. Подшипники 137 вставлены между стационарным воздуховодом 98 и коннектором 96. Коннектор 96 с возможностью вращения изолирован от стационарного воздуховода 98 посредством манжетных уплотнений 132. Когда воздух под давлением подают по воздуховоду 98 к цилиндру 124, поршень 94 скользит в направлении от крышки 92, толкая подвижный диск 84 к неподвижному диску 82 и увеличивая эффективный диаметр ведущего шкива 80. То есть, усилие, прилагаемое к подвижному диску 84 поршнем 94, действует в том же направлении, в котором действует усилие, прилагаемое к подвижному диску 84 за счет действия механизма центробежного груза.
[00151] Как было разъяснено выше, в целом, более высокая частота вращения двигателя заставляет ведущий шкив 80 вращаться быстрее, увеличивая усилие, прилагаемое к подвижному диску 84 за счет центробежных грузов 120, что приводит к увеличению эффективного диаметра ведущего шкива 80 (то есть, уменьшению эффективного диаметра ведомого шкива 88) и к уменьшению передаточного отношения БСТ 40. То есть, передаточное отношение БСТ определяется рабочей частотой вращения двигателя 24.
[00152] Приводимый в действие пневматически поршень 94 изменяет характеристическую кривую ведущего шкива 80. Ведущий шкив 80 при одной и той же частоте вращения двигателя достигает большего эффективного диаметра тогда, когда действие механизма центробежного груза поддерживается действием пневматического поршня 94, чем тогда, когда пневматический поршень не приводят в действие. Пневматический поршень 94 эффективно переводит снегоход 10 на более высокую передачу на более низкой частоте вращения двигателя, чем та, которая была бы при управлении БСТ 40 исключительно механически (то есть центробежными грузами 120). Когда давление стравливают, так что поршень 94 перестает быть приведенным в действие, пружина 116 возвращает подвижный диск 84 в его исходное положение, так что БСТ 40 возвращается к чисто механической установке эффективного диаметра ведущего шкива, то есть, и передаточного отношения БСТ, исключительно центробежными грузками 120.
[00153] То есть, БСТ 40 полностью работоспособна как с приведением в действие поршня 94, так и без этого. Пневматический поршень 94 позволяет управлять передаточным отношением БСТ независимо от частоты вращения двигателя. Например, передаточное отношение БСТ можно регулировать на основании учета каких-либо факторов, например, крутящего момента, требующегося на приводной оси 90, расхода топлива, комфорта водителя и т.д. Для получения нужной характеристической кривой можно также регулировать пневматическое давление, приводящее в действие поршень 94. Например, БСТ 40 может быть придана конфигурация для получения максимальной экономии топлива, или приемистости, или для оптимизации обоих этих параметров. Пневматический поршень 94 также можно использовать для моделирования реакции многоступенчатой трансмиссии. Далее подробно рассматриваются несколько способов пневматического управления БСТ 40.
[00154] Сжатый воздух для приведения в действие поршня 94 обеспечивается электрическим компрессором 320 (фиг. 5), размещенным где-либо на снегоходе. Компрессор 320 содержит воздушно-водяной сепаратор, предназначенный для предотвращения или минимизации содержания влаги внутри БСТ 40. Предусмотрено, чтобы вместо электрического компрессора использовался механический компрессор. Предусмотрено, чтобы компрессор 320 мог быть любым компрессором, пригодным для нагнетания давления, требующегося для приведения в действие поршня 94. Также предусмотрено, чтобы компрессор 320 получал приводную мощность от двигателя, иного, чем двигатель 24, от мотора или батареи, в зависимости от конкретных требований.
[00155] Пневматическое давление, подаваемое на поршень 94 и получаемое в результате этого усилие поршня, полностью сводящее друг к другу подвижный и неподвижный диски 82 и 84, намного меньше для варианта осуществления БСТ 40, показанного на фиг. 4А и 4В, чем для БСТ, в котором передаточным отношением управляют исключительно пневматически. Типоразмер насоса или компрессора 320, требуемый для выработки данного усилия поршня, значительно меньше того, который требуется для БСТ, управляемого исключительно пневматически, что позволяет достичь экономии энергии и пространства для снегохода 10.
[00156] Между насосом 220 и цилиндром 124 установлен аккумулятор 322 (фиг. 5), служащий резервуаром сжатого воздуха, обеспечивающим быстрое срабатывание поршня 94 во всех условиях эксплуатации и ограничивающим колебания давления.
[00157] Также предусмотрено, чтобы для обеспечения сжатого воздуха для приведения в действие поршня 94 вместо компрессора 320 и аккумулятора 322 использовались баллоны со сжатым газом.
[00158] Управление приведением в действие поршня 94 ведут автоматически в зависимости от таких параметров, как скорость транспортного средства, частота (об/мин) вращения двигателя, требуемый крутящий момент, остаток топлива и т.п. Ниже описаны разнообразные способы управления БСТ 40.
[00159] Предусмотрено, чтобы водитель снегохода мог дополнительно вручную управлять приведением в действие поршня 94. Например, для включения и отключения приведения поршня в действие может быть предусмотрен переключатель, например, кнопочный переключатель. Альтернативно, может быть предусмотрен грибок бесступенчатой регулировки, с помощью которого водитель снегохода мог бы задавать величину усилия, прилагаемого поршнем 94.
[00160] Далее со ссылкой на фиг. 5 подробно рассматривается пневматическая система 300, служащая для подачи сжатого воздуха к поршню 94, а также пневматический блок управления (ПБУ) 310, служащий для автоматического управления пневматическим приводом поршня 94.
[00161] Пневматическая система 300 содержит компрессор 320, электромотор 340, аккумулятор 322, блок 328 регулировки давления, содержащий впускной воздушный клапан 324, выпускной воздушный клапан 326, датчик 330 давления в цилиндре и датчик 332 давления в аккумуляторе.
[00162] ПБУ 310 регулирует давление сжатого воздуха, подаваемого на поршень 94 для избирательного и регулируемого приведения в действие поршня 94.
[00163] Как было рассмотрено выше, цилиндр 124 соединен с компрессором 320 для получения сжатого воздуха. Компрессор 320 функционально соединен с ПБУ 310. ПБУ 310 посылает электронные сигналы компрессору 320 для приведения его в действие. Предусмотрено, чтобы ПБУ 310 был также выполнен с возможностью приема сигналов от компрессора 320.
[00164] Как было также рассмотрено выше, аккумулятор 322, по текучей среде сообщающийся с компрессором 320 (и подсоединенный ниже по потоку от компрессора), сохраняет сжатый воздух для приведения в действие поршня 94 и помогает уменьшить инерционность приведения поршня 94 в действие. То есть компрессор 320 соединен с цилиндром 124 через аккумулятор 322. Сжатый воздух течет от компрессора 320 к аккумулятору 322, а от аккумулятора 322 течет к цилиндру 124. Предусмотрено, чтобы была предусмотрена дополнительная схема движения потока сжатого воздуха, текущего от компрессора 320 к цилиндру 124 без прохождения через аккумулятор 322. Предусмотрено также отсутствие аккумулятора 322.
[00165] Впускной воздушный клапан 324, подсоединенный между аккумулятором 322 и цилиндром 124, позволяет воздуху течь из аккумулятора 322 к цилиндру 124. Впускной воздушный клапан 324 открывают, если давление внутри цилиндра 124 (определенное датчиком 330 давления в цилиндре) меньше требуемого, и если аккумулятор 322 может подавать сжатый воздух под давлением (определяемым датчиком 332 давления в аккумуляторе), превышающим давление в цилиндре 124.
[00166] Соединенный с цилиндром 124 выпускной воздушный клапан 124 позволяет стравливать в атмосферу находящийся в цилиндре 124 сжатый воздух. Выпускной воздушный клапан 326 открывают, если давление в цилиндре 124 превышает требуемое значение давления.
[00167] Впускной воздушный клапан 324 и выпускной воздушный клапан 326 функционально соединены с ПБУ 310. Каждый из клапанов 324, 326 может быть выполнен с возможностью открытия при определенных уставках давления. Уставки давления для клапанов 324, 326 могут присваиваться электронно или регулироваться механически. ПБУ 310 посылает сигналы управления на клапаны 324, 326 для инициирования их открытия и закрытия. Предусмотрено, чтобы ПБУ 310 также был выполнен с возможностью принимать сигналы от клапанов 324, 326. Предусмотрено, чтобы впускной воздушный клапан 324 и выпускной воздушный клапан 326 были заменены одним пропорциональным релейным клапаном.
[00168] Датчик 322 давления в аккумуляторе подсоединен к аккумулятору 322, чтобы измерять давление воздуха в аккумуляторе 322. В иллюстрируемом варианте осуществления, датчик 332 давления в аккумуляторе подключен ниже по потоку от аккумулятора 322, между аккумулятором 322 и впускным воздушным клапаном 324. Тем не менее предусмотрено, чтобы датчик 322 давления в аккумуляторе был подсоединен в любом месте аккумулятора 322.
[00169] Датчик 330 давления воздуха в цилиндре измеряет давление воздуха в цилиндре 124. Датчик 330 давления в цилиндре показан подключенным между впускным воздушным клапаном 324 и цилиндром 124.
[00170] Каждый из датчиков 330, 332 коммуникационно соединен с ПБУ 310. ПБУ 310 выполнен с возможностью приема от датчиков 330, 332 давления данных и/или сигналов, содержащих информацию о давлении воздуха, измеряемом датчиками 330, 332 давления. Предусмотрено, чтобы ПБУ 310 также мог быть выполнен с возможностью отсылки сигналов управления или сигналов данных на датчики 330, 332 давления. ПБУ 310 также выполнен с возможностью отсылки сигналов управления на впускной воздушный клапан 324, выпускной воздушный клапан 326 и компрессор 320, причем данные сигналы управления частично основаны на сигналах, полученных отдатчиков 330, 332 давления.
[00171] Как было указано выше, предусмотрено, чтобы вместо компрессора 320 и аккумулятора 322 использовался баллон со сжатым газом. В таком варианте осуществления, ПБУ 310 будет функционально соединен с баллоном со сжатым воздухом, будет выполнен с возможностью подачи на него сигналов управления или сигналов данных, каковые сигналы будут основаны на сигналах, получаемых от других датчиков, таких как датчик 330 давления в цилиндре.
[00172] ПБУ 310 коммуникационно сообщается с ЭБУ 200 для управления работой поршня 94. Предусмотрено, чтобы некоторые или все функции ПБУ 310 были интегрированы в ЭБУ 200.
[00173] В иллюстрируемом варианте осуществления снегохода 10, также предусмотрен селектор 380 усилия поршня. Селектором 380 усилия поршня действует водитель снегохода 10 для приведение в действие поршня и/или выбора требуемого усилия Pf поршня. ПБУ 310 коммуникационно сообщается с селектором 380 усилия поршня для опционального управления усилием Pf поршня отчасти в зависимости от выбранного значения усилия поршня. Селектор 380 усилия поршня может быть выполнен в виде нажимной кнопки, переключателя, грибка, рычага и т.п., которые можно передвигать в пределах множества положений выбора усилия поршня, например, между положением «0», положением «низкое усилие» и положением «высокое усилие».
[00174] Со ссылкой на фиг. 6 - фиг. 10 далее рассматриваются несколько способов пневматического управления БСТ 40.
[00175] В иллюстрируемом варианте осуществления способа управления БСТ 40, центробежные грузы 120 БСТ 40 оптимизируют для работы в спортивном режиме SPORT и на большой высоте (заданной, в данном варианте осуществления транспортного средства 10, значением 2000 метров над уровнем моря и выше). При этом, в режиме SPORT и на большой высоте усилие Pf, прилагаемое поршнем 94 к подвижному диску 84, равно нулю. Диаметр D1 ведущего шкива определяют в зависимости от частоты ES вращения двигателя, которой, в свою очередь управляет ЭБУ 200 на основании карты (не показана) управления частотой вращения двигателя в спортивном режиме.
[00176] В отсутствии какого-либо усилия Pf, прилагаемого поршнем 94, частота ES вращения двигателя, полученная для конкретного положения TVP дроссельной заслонки и установки IT момента зажигания на малых высотах больше, чем на больших высотах, из-за того, что на малых высотах атмосферное давление выше. Более высокое атмосферное давление на малых высотах приводит к тому, что при одной и той же степени TVP открытия дроссельной заслонки через корпус дроссельной заслонки в камеру сгорания засасывается больше воздуха. Для поддержания стехиометрического отношения топливовоздушной смеси, в двигатель 24 на малых высотах впрыскивают большее количество топлива, чем на больших высотах, и при этом вырабатывается большая мощность, вращающая коленчатый вал с большей частотой ES вращения двигателя при той же самой степени TVP открытия дроссельной заслонки.
[00177] Пневматический поршень 94 обеспечивает возможность управления частотой ES вращения двигателя независимо от положения TVP дроссельной заслонки. Пневматический поршень можно привести в действие для снижения частоты ES вращения двигателя, чтобы тем самым парировать увеличение частоты ES вращения двигателя, обусловленное высотой нахождения транспортного средства.
[00178] Со ссылкой на фиг. 6 далее подробно раскрывается способ 400 управления БСТ 400 с целью компенсации эффекта высоты.
[00179] Выполнение способа начинают шагом 410, на котором ПБУ 310 определяет высоту на основании сигнала, полученного отдатчика высоты.
[00180] Затем, на шаге 420 ПБУ 310 определяет рабочий режим на основании сигнала, полученного от переключателя режимов 62 или на основании того, какой ключ находится в ключеприемнике.
[00181] Затем способ 400 переходит на шаг 430, на котором на основании сигналов, полученных посредством ЭБУ 200 от датчика 210 переключателя режимов и датчика 205 высоты определяют, является ли рабочий режим спортивным режимом SPORT и является ли высота по меньшей мере равной верхней пороговой высоте АНТ (то есть, большой высотой). В иллюстрируемом варианте осуществления, верхняя пороговая высота АНТ установлена на 2000 метров, но предусмотрено, чтобы верхняя пороговая высота АНТ была иной, чем 2000 метров. Если на шаге 430 определяют, что рабочий режим является спортивным режимом SPORT, а высота является большой, тогда способ 400 переходит на шаг 435, на котором усилие Pf поршня устанавливают на нуль для всех значений положения РР органа управления газом и частоты N2 вращения ведомого шкива. Если на шаге 430 определяют, что рабочий режим не является спортивным режимом SPORT (то есть, является стандартным режимом STD или экономичным режимом ЕСО), или же определяют, что высота составляет 2000 метров и меньше (то есть, является малой высотой), тогда способ 400 переходит на шаг 440.
[00182] На шаге 440 ПБУ 310 определяет положение РР органа управления газом на основании сигнала от датчика 204 положения органа управления газом, а затем переходит на шаг 450, на котором ПБУ 310 определяет частоту N2 ведомого шкива на основании сигнала, полученного от датчика 203 частоты вращения ведомого шкива. Затем способ переходит на шаг 460.
[00183] На шаге 460 ПБУ 310 находит требуемое значение усилия поршня Pf в соответствующей карте управления усилием поршня для конкретного режима и высоты. Если рабочий режим является спортивным режимом SPORT, а высота является малой, то ПБУ 310 находит усилие Pf поршня по карте управления СПОРТИВНЫЙ РЕЖИМ - МАЛАЯ ВЫСОТА (фиг. 7). Если рабочий режим является стандартным режимом STD, а высота - малой, то ПБУ 310 находит усилие Pf поршня по карте управления СТАНДАРТНЫЙ РЕЖИМ - МАЛАЯ ВЫСОТА (фиг. 8 В). Если рабочий режим является стандартным режимом STD, а высота -большой, то ПБУ 310 находит усилие Pf поршня по карте управления СТАНДАРТНЫЙ РЕЖИМ - БОЛЬШАЯ ВЫСОТА (фиг. 8А). Для экономичного рабочего режима ЕСО и малой высоты ПБУ 310 находит усилие Pf поршня из карты управления ЭКОНОМИЧНЫЙ РЕЖИМ - МАЛАЯ ВЫСОТА (фиг. 9В), а для экономичного рабочего режима ЕСО и большой высоты ПБУ 310 находит усилие Pf поршня по карте управления ЭКОНОМИЧНЫЙ РЕЖИМ - БОЛЬШАЯ ВЫСОТА (фиг. 9А).
[00184] Наконец, на шаге 470 ПБУ 310 регулирует пневматическое давление Р в цилиндре 144 в зависимости от требуемого усилия Pf поршня, найденного на шаге 470 в соответствующей карте управления. ПБУ 310 принимает сигналы от датчиков 330, 332 давления и подает сигналы на компрессор 340 и клапаны 324, 326 для того, чтобы отрегулировать пневматическое давление до требуемого значения.
[00185] В иллюстрируемом способе 400 управления, ПБУ 310 использует карту управления БОЛЬШАЯ ВЫСОТА для любой высоты, не меньшей верхней пороговой высоты АНТ, и карту управления УРОВЕНЬ МОРЯ для высот, меньших верхней пороговой высоты АНТ. Предусмотрено, чтобы для промежуточных высот между верхней пороговой высотой АНТ и уровнем моря, ПБУ 310 мог для конкретного рабочего режима интерполировать между картами управления БОЛЬШАЯ ВЫСОТА и УРОВЕНЬ МОРЯ. Предусмотрено использование более двух карт управления для компенсации эффекта высоты, например, для промежуточных высот между верхней пороговой высотой АНТ и высотой уровня моря может быть обеспечена дополнительная карта управления. Предусмотрено, чтобы была задана нижняя пороговая высота ALT, чтобы до нижней пороговой высоты ALT использовали карту управления МАЛАЯ ВЫСОТА, и чтобы для высот от нижней пороговой высоты ALT и до верхней пороговой высоты АНТ могли использовать карту управления ПРОМЕЖУТОЧНАЯ ВЫСОТА. Предусмотрено, чтобы карта управления была бы обеспечена и для высот ниже уровня моря.
[00186] Когда транспортное средство 10 эксплуатируют в спортивном режиме SPORT на уровне моря, поршень 94 прилагает усилие Fp к подвижному диску 84 ведущего шкива 80, которое определяют в зависимости от положения РР органа управления газом и частоты N2 вращения ведомого шкива (которая находится в известном соотношении со скоростью VS транспортного средства). Предусмотрено, чтобы усилие Pf поршня определяли в зависимости от положения TVP дроссельной заслонки, а не в зависимости от положения РР органа управления газом. На фиг. 7 показана карта 700 управления усилием поршня для малых высот и спортивного режима.
[00187] По фиг. 7 видно, что усилие Pf поршня прилагают, когда положение РР органа управления газом превышает нижнее пороговое значение РР2 (составляющее примерно 20% в данном варианте осуществления), или когда частота N2 вращения ведомого шкива превышает пороговое значение N2a (составляющее примерно 5000 об/мин в данном варианте осуществления). Для любой конкретной частоты N2 вращения ведомого шкива, усилие Pf поршня увеличивается до максимума по мере увеличения значения положения РР органа управления газом (в иллюстрируемом варианте осуществления, максимальное усилие Fp поршня прилагается при значении положения РР органа управления газом, равном примерно 75%). После этого усилие Pf поршня уменьшается при увеличении значения положения РР органа управления газом. Усилие Pf поршня не прилагают, когда частота N2 вращения ведомого шкива равна нулю, если положение РР органа управления газом не превышает порогового значения РР1 (примерно 60% в данном варианте осуществления). В режиме высокой частоты N2 вращения ведомого шкива и в режиме малых значений положения РР органа управления газом (РР<РР2, N2>N2a), ПБУ 310 прилагает небольшое, но, тем не менее, не нулевое усилие Pf поршня. Для положений РР органа управления газом свыше РР2, с увеличением частоты N2 вращения ведомого шкива усилие Fp поршня в целом увеличивается до максимального значения, после чего начинает уменьшаться с увеличением частоты N2 вращения ведомого шкива.
[00188] Как видно по фиг. 8А, при работе в стандартном режиме STD на большой высоте, поршень 94 прилагает к ведущему шкиву 84 усилие Fp для уменьшения передаточного отношения (D1/D2) и получения меньшей частоты ES вращения двигателя по сравнению со спортивным режимом SPORT при той же самой скорости VS транспортного средства. Прилагаемое усилие Fp поршня не равно нулю только тогда, когда положение РР органа управления газом превышает конкретный минимум (20% в иллюстрируемом варианте осуществления), и когда частота N2 вращения ведомого шкива меньше максимума (8000 об/мин в иллюстрируемом варианте осуществления). Усилие Fp поршня является наибольшим при промежуточных значениях частоты вращения ведомого шкива (примерно 5000 об/мин в иллюстрируемом варианте осуществления).
[00189] Как можно видеть по карте 800' управления, показанной на фиг. 8В, при работе в стандартном режиме STD на уровне моря, для любой конкретной комбинации частоты N2 вращения ведомого шкива и положения РР органа управления газом, усилие Fp поршня, прилагаемое к ведущему шкиву 84, больше усилия, прилагаемого при работе в стандартном режиме на большой высоте и при работе в спортивном режиме на уровне моря.
[00190] Как можно видеть по карте 900 управления, показанной на фиг. 9А, при работе в экономичном режиме ЕСО на большой высоте, поршень 94 в целом прилагает к ведущему шкиву 84 усилие Fp большее, чем при работе в стандартном режиме на большой высоте, чтобы еще больше уменьшить передаточное отношение (D1/D2) относительно его значения при работе в стандартном режиме на большой высоте. Тем не менее, усилие Fp поршня в экономичном режиме на большой высоте не столь велико, как усилие Fp поршня, прилагаемое в стандартном режиме на уровне моря (фиг. 9В). В экономичном режиме на уровне моря усилие Fp поршня является ненулевым для всех значений частоты N2 вращения ведомого шкива. На больших высотах, прилагаемое усилие Fp поршня является ненулевым только тогда, когда положение РР органа управления газом превышает конкретный минимум (20% в иллюстрируемом варианте осуществления, как и для стандартного режима). Усилие Fp поршня является наибольшим для промежуточных значений частоты вращения ведомого вала (примерно 5000 об/мин в иллюстрируемом варианте осуществления).
[00191] Как можно видеть по карте 900' управления, показанной на фиг. 9В, при работе в экономичном режиме на уровне моря, принимая во внимание вышеизложенное, прилагаемое к ведущему шкиву 84 усилие Fp поршня 94 повышено по сравнению с усилием Fp поршня для экономичного режима и большой высоты, а также по сравнению с усилием Fp поршня для стандартного режима на уровне моря. Усилие Fp поршня повышают для того, чтобы скомпенсировать повышение частоты ES вращения двигателя из-за повышения атмосферного давления.
[00192] Предусмотрено, чтобы рассмотренные выше карты 700, 800, 800', 900, 900' управления усилием Pf поршня соответствовали бы различным значениям давления воздуха, а не различным высотам.
[00193] Предусмотрено, чтобы в добавление к картам 700, 800, 800', 900, 900', используемым в показанном на фиг. 6 способе компенсации эффекта высоты, ПБУ 310 также мог быть соединен с ЭБУ 200 и/или другими датчиками, такими как датчик 208 частоты вращения двигателя в управлении в замкнутом контуре с обратной связью с целью регулирования усилия Pf поршня для достижения заданной частоты ES вращения двигателя.
[00194] Далее со ссылкой на фиг. 10 подробно раскрывается функция ПБУ 310 управления, когда транспортное средство паркуется или трогается с места.
[00195] Когда запускают транспортное средство 10, двигатель 24 необходимо раскрутить для увеличения частоты ES вращения двигателя до значений, превышающих частоту вращения ESengage, при которых произойдет включение сцепления БСТ 40. Обычно водитель нажимает на рычаг 37 газа для увеличения РР положения органа управления газом с соответствующим увеличением степени TVP открытия дроссельной заслонки и увеличением частоты ES вращения двигателя. Раскручивание двигателя 24 таким способом обычно создает значительный шум вдобавок к повышенному расходу топлива.
[00196] В настоящем варианте осуществления, показанном на фиг. 10, по карте 1000 управления БСТ 40 управляют пневматически для того, чтобы можно было осуществить более плавный запуск транспортного средства 10 с пониженным уровнем шума и уменьшенным расходом топлива. Пневматическое управление БСТ 40 также выполняют, когда транспортное средство 10 движется на малой скорости VS и когда двигатель 24 работает на малых частотах ES вращения.
[00197] Когда пневматическое усилие Р прилагают к поршню 94, подвижный диск 84 толкается к неподвижному диску 82 для вхождения во взаимодействие с ремнем 86, и при этом частота ESengage вращения становится ниже. Уменьшая частоту ESengage вращения сцепления, пневматическое управление БСТ 40 позволяет тронуться с места с меньшим шумом и меньшим расходом топлива. После включения сцепления БСТ 40, дальнейшее увеличение усилия Fp поршня приводит к увеличению частоты N2 вращения ведомого шкива и скорости VS транспортного средства. После запуска двигателя 24 и включения сцепления БСТ 40, если водитель продолжит увеличивать значение положения РР органа управления газом, ПБУ 310 увеличит усилие Fp поршня, прилагаемое к шкиву 84, так что скорость VS транспортного средства сможет увеличиться без необходимости соответствующего повышения частоты ES вращения двигателя, что бы иначе потребовалось в отсутствии пневматической системы 300. Результатом относительного снижения частоты ES вращения двигателя также является снижение уровня шума и расхода топлива.
[00198] Как можно видеть по фиг. 10, усилие Pf поршня в функции паркования увеличивается вместе с положением РР органа управления газом, причем интенсивность этого увеличения выше для положений РР органа управления газом ниже порогового положения РР9 органа управления газом (10% в иллюстрируемом варианте осуществления). Пороговое положение РР9 органа управления газом обычно устанавливают на уровне, при котором транспортное средство 10 трогается с места. В области 1010 карты 1000 управления (РР<РР9), транспортное средство 10 еще не тронулось с места, а в области 1020 (РР>РР9) транспортное средство движется с малой скоростью VS, а двигатель 24 работает на низкой частоте ES вращения. Усилие Pf поршня в функции паркования применяется для положений РР органа управления газом до 50%, а максимальное прилагаемое усилие Pf поршня в функции паркования составляет примерно 700 Н (в данном варианте осуществления, в котором для увеличения диаметра ведущего шкива до максимального значения требуется суммарное усилие около 2000 Н).
[00199] Как можно видеть по фиг. 10, прилагаемое к БСТ 40 усилие Fp поршня также зависит от температуры ТЕ двигателя. Если при запуске транспортного средства 10 двигатель 24 уже теплый, например, если двигатель 24 запускают вскоре после того, как он был заглушен, тогда прилагаемое усилие Pf поршня таково, что снижение оборотов сцепления будет немного больше, чем в случае холодного запуска двигателя 24. Когда двигатель 24 холодный, желательно прогреть его, чтобы можно было работать на немного более высоких частотах вращения. То есть, прилагаемое поршнем 94 усилие выше для более высоких значений температуры ТЕ двигателя. На зависимость усилия Pf поршня от температуры влияет ряд параметров, среди которых параметры, относящиеся к пневматической системе, например, трение, термическое расширение и т.п.Также предусмотрено, что прилагаемое усилие Pf поршня может быть меньшим при более высоких температурах. В проиллюстрированных вариантах осуществления
[00200] Усилие Pf поршня также зависит от режима работы. В спортивном режиме, чтобы получить повышенный крутящий момент и позволить транспортному средству 10 разгоняться быстрее, БСТ 40 эксплуатируют исключительно механически без приложения какого-либо усилия Pf поршня. Ненулевое усилие Pf поршня прилагается в стандартном и экономичном режимах. В иллюстрируемом варианте осуществления, для конкретных температуры двигателя и положения РР органа управления газом, усилие Pf поршня одинаково для стандартного и экономичного режимов. Показанную на фиг. 10 карта 1000 управления используют как в стандартном, так и в экономичном режимах. Тем не менее предусмотрено, чтобы в стандартном и экономичном режимах использовались отличные друг от друга карты управления усилием поршня, чтобы прилагать отличные друг от друга усилия поршня. Например, для одного и того же положения РР органа управления газом усилие Pf поршня может быть большим в экономичном режиме, чем в стандартном режиме.
[00201] ПБУ 310 вызывает приложение усилия поршня функции паркования, когда он определяет существование условие остановки/трогания с места, которое указывает на то, что транспортное средство 10 находится в процессе остановки или трогания с места. ПБУ 310 определяет существование условие остановки/трогания с места, если скорость VS транспортного средства ниже начальной пороговой парковочной скорости VSP1, а частота ES вращения двигателя ниже парковочной частоты ESP1 вращения. В иллюстрируемом варианте осуществления, пороговая частота ESP1 вращения двигателя установлена на 1500 об/мин. В некоторых вариантах осуществления, условия остановки/трогания с места включают в себя незадействованное состояние тормоза 38.
[00202] Когда удовлетворяются перечисленные выше условия остановки/трогания с места, и транспортное средство 10 не находится в спортивном режиме, ПБУ 310 обращается к показанной на фиг. 10 карте управления для регулирования пневматического давления Р таким образом, чтобы создать усилие Pf поршня, полученное из карты 1000 управления усилием поршня при парковании. Если транспортное средство 10 находится в спортивном режиме и если пневматическое давление находится на ненулевом уровне, тогда ПБУ 310 стравливает пневматическое давление для обеспечения того, чтобы управление БСТ велось исключительно механическими средствами. Обычно, тем не менее, при запуске транспортного средства 10 пневматическое давление Р и усилие Pf поршня равны нулю. Если для регулирования усилия Pf поршня используют управление в замкнутом контуре с обратной связью, то его отключают, когда прилагают усилие поршня функции паркования. Предусмотрено, чтобы усилие Pf поршня могло прилагаться даже если транспортное средство работает в спортивном режиме и если выявлены условия паркования/трогания с места. Поэтому в некоторых вариантах осуществления карта управления усилием при парковании может также обеспечиваться и для спортивного режима SPORT.
[00203] В некоторых вариантах осуществления, усилие Pf поршня функции паркования снимают, если ПБУ 310 определяет, что транспортное средство тронулось с места (например, если скорость транспортного средства поднимается выше конечной пороговой парковочной скорости VSP2 транспортного средства). В иллюстрируемом варианте осуществления, конечная пороговая парковочная скорость VSP2 выше начальной пороговой парковочной скорости VSP1. Тем не менее предусмотрено, чтобы начальная пороговая парковочная скорость VSP1 транспортного средства была той же самой, что и конечная пороговая парковочная скорость VSP2 транспортного средства.
[00204] В иллюстрируемом варианте осуществления, транспортное средство считается движущимся, и усилие Pf поршня функции паркования снимают, когда скорость VS транспортного средства становится выше конечной пороговой парковочной скорости VSP2 транспортного средства (которая в иллюстрируемом варианте осуществления установлена на 10 км/ч), и когда частота ES вращения двигателя превышает пороговую парковочную частоту ESP2 вращения двигателя (которая в иллюстрируемом варианте осуществления установлена на 22000 об/мин для экономичного режима).
[00205] Пороговая парковочная частота ESP2 вращения двигателя в стандартном режиме STD выше, чем в экономичном режиме ЕСО. ПБУ 310 также прекращает приложение усилия Pf поршня функции паркования, если ПБУ 310 определяет, что частота ES вращения двигателя близка к частоте ESstall самовыключения двигателя, которая неодинакова для различных рабочих режимов и обычно ниже частоты ESidle холостого хода двигателя для конкретного режима. Дополнительно, если обнаруживается задействование тормоза 38, то ПБУ 310 прекращает приложение усилия Pf поршня функции паркования.
[00206] Далее со ссылкой на фиг. 11А и фиг. 11В подробно описывается управление минимальным усилием БСТ 40.
[00207] Когда транспортное средство 10 движется под уклон, водитель иногда отпускает орган 37 управления газом, или удерживает орган 37 управления газом при небольшом значении РР (то есть РР~0%), так как транспортное средство 10 ускоряется само под воздействием силы тяжести. При этом ЭБУ 200 уменьшает положение TVP дроссельной заслонки в соответствии с положением РР органа управления газом. В экономичном ЕСО и стандартном STD режимах, при продолжении движения транспортного средства под уклон, в результате уменьшения положения TVP дроссельной заслонки частота ES вращения двигателя может снизиться почти до нуля, что может привести к выходу ремня 86 из зацепления с ведущим шкивом 82. Для предотвращения отключения сцепления БСТ 40 в экономичном ЕСО и стандартном STD режимах, ПБУ 310 так управляет усилием Pf поршня, чтобы сохранять его на уровне минимального усилия Pfmin поршня, требуемого для сохранения включенным сцепления БСТ 40.
[00208] Когда сцепление БСТ 40 включено (за счет управления минимальным усилием поршня БСТ 40), скорость VS транспортного средства и, следовательно, частота N2 вращения ведомого шкива превышают частоту N1 вращения ведущего шкива и частоту ES вращения двигателя. Ведомый шкив 88 приводит в движение ведущий шкив 80 и выходной вал 57 двигателя. В таких условиях отрицательной нагрузки, частота ES вращения коленчатого вала 57, приводимого в движение ведомым шкивом 88, превышает ту частоту, которая была бы достигнута, если бы коленчатый вал 57 приводился бы в движение двигателем 24 при малой степени TVP открытия дроссельной заслонки. По мере продолжения качения транспортного средства 10 под уклон и по мере того, как ведомый шкив 88 приводит в движение ведущий шкив 80 и выходной вал 57 двигателя, частота вращения ведомого шкива 88 и, следовательно, скорость VS транспортного средства снижаются. Такое замедление движения транспортного средства 10 происходит плавнее, чем при задействовании тормозов 38.
[00209] В соответствии с фиг. 11А и 11В, минимальное усилие Pfmin поршня задают в зависимости от частоты ES вращения двигателя, температуры ТЕ двигателя и рабочего режима, так, как это показано на картах 1100 и 1100'. ПБУ 310 обращается к карте 1100 управления в стандартном режиме STD и к карте 1100' в экономичном режиме ЕСО для получения значения усилия Pf поршня, которое нужно приложить к ведущему шкиву 80. В спортивном режиме ПБУ 310 устанавливает усилие Pf поршня на нуль. То есть, в спортивном режиме управление БСТ 40 выполняют исключительно механическими средствами. Предусмотрено, чтобы минимальное усилие поршня также задавалось и для спортивного режима SPORT.
[00210] В иллюстрируемом варианте осуществления, управление БСТ 40 по минимальному усилию поршня, описанное выше со ссылкой на фиг. 11А и фиг. 11В, активируют, когда ПБУ 310 определяет, что частота ES вращения двигателя превышает пороговую частоту ES11 вращения двигателя. ПБУ 310 прекращает прилагать усилие Pf, полученное по карте 1100, 1100' управления минимальным усилием при движении под уклон, если частота ES вращения двигателя опускается ниже пороговой частоты ES11 или если водитель переключает рабочий режим со стандартного STD и экономичного ЕСО на спортивный режим SPORT.
[00211] Также предусмотрено, чтобы управление минимальным усилием поршня могло быть активировано при выявлении условия отрицательной нагрузки, то есть, когда частота ES вращения двигателя превышает пороговую частоту вращения двигателя при движении под уклон, и когда верно по меньшей мере одно из следующего: положение РР органа управления газом меньше положения органа управления газом, порогового для движения под уклон; положение TVP дроссельной заслонки меньше положения дроссельной заслонки, порогового для движения под уклон.
[00212] ПБУ 310 также управляет пневматическим поршнем 94 для предотвращения самовыключения двигателя 24 в соответствии с приведенным ниже описанием.
[00213] Двигатель 24 может самовыключиться (самовыключиться), например, если орган 37 управления газом неожиданно отпустят и задействуют тормоз 38, что приведет к тому, что ЭБУ 200 закроет дроссельную заслонку до нулевого положения TVP. Другим примером ситуации, в которой двигатель 24 может самовыключиться, является задействование тормоза 38 при потере контакта с поверхностью дороги соответствующего элемента транспортного средства, будь то колеса или гусеница 65. Если поршень 94 будет приведенным в действие при возникновении ситуации, в которой двигатель 24 может самовыключиться, тогда ПБУ 310 заставит открыться пневматический клапан 326 для того, чтобы стравить воздействующее на поршень давление Р, и быстро деактивировать поршень 94. Когда поршень 94 деактивирован, сцепление БСТ 40 отключается, что изолирует двигатель 24 от неожиданно заторможенных колес. Двигатель 24 продолжит работать на малых частотах вращения, меньших оборотов ESengage, так что когда водитель отпустит тормоз 38 и начнет приводить в действие орган 37 управления газом, частота ES вращения двигателя может быть быстро увеличена в ответ на увеличение значения положения РР органа управления газом.
[00214] Управление БСТ 40 для защиты от самовыключения с помощью ПБУ 310 активируют, когда ПБУ 310 выявляет существование условия самовыключения двигателя. В иллюстрируемом варианте осуществления, условие самовыключения включает в себя высокую интенсивность уменьшения частоты N2 вращения ведомого шкива. В иллюстрируемом варианте осуществления, интенсивность изменения частоты вращения ведомого шкива считается высокой, когда величина интенсивности изменения превышает пороговую интенсивность изменения при самовыключении, которую устанавливают на 150 об/мин/с2. Тем не менее предусмотрено, чтобы пороговая интенсивность изменения при самовыключении была отличной от значения 150 об/мин/с2. Также предусмотрено, что управление для защиты от самовыключения можно активировать, если приводят в действие в тормоз 38 при высокой интенсивности уменьшения частоты N2 вращения ведомого шкива.
[00215] ПБУ 310 управляет поршнем 94 для того, чтобы обеспечить плавность трогания с места после остановки на подъеме. Когда тормоз 38 отпустят после того, как он был задействован, если ПБУ 310 обнаружит противоположное направление вращение ведомого шкива 88 (отрицательную частоту N2 вращения ведомого шкива), тогда ПБУ 310 определит, что транспортное средство расположено на уклоне и направлено вверх по данному уклону (условие остановки на подъеме). Альтернативно, выявление условия остановки на подъеме также может быть выполнена отчасти в зависимости от уклона поверхности дороги, определяемого датчиком 205 ускорения или датчиком 280 уклона, которыми оснащено транспортное средство 10.
[00216] Когда выявляют существование условия остановки на подъеме, ПБУ 310 увеличивает усилие Pf поршня с заданной интенсивностью (~2000 Н/с в иллюстрируемом варианте осуществления). ПБУ 310 продолжает увеличивать усилие Pf поршня или до регистрации нулевой частоты N2 вращения ведомого шкива, или до достижения предварительно заданного максимального усилия Pf поршня (700 Н в иллюстрируемом варианте осуществления). В иллюстрируемом варианте осуществления, усилие Pf поршня увеличивают с такой интенсивностью, чтобы усилие Pf поршня достигло своего максимального значения в пределах порогового периода времени для остановки на подъеме. В иллюстрируемом варианте осуществления изобретения, пороговая длительность остановки на подъеме составляет 1 секунду.
[00217] Если выявляют нулевую частоту N2 вращения ведомого шкива, тогда усилие Pf поршня поддерживают на уровне, при котором была зарегистрирована нулевая частота N2 вращения ведомого шкива. После того, как усилие Pf поршня достигнет предварительно заданного максимального уровня для управления в условиях остановки на подъеме, усилие Pf поршня продолжают поддерживать на этом уровне. Пневматическое управление БСТ 40 в условиях остановки на подъеме прекращают, когда водитель приводит в действие орган 37 управления газом, то есть когда положение РР органа управления газом ненулевое, РР>0 или когда задействуют тормоз 38, и тогда усилие Pf поршня возвращают к значению по умолчанию (то есть, к значению, определенному на основании текущего рабочего режима, частоты ES вращения двигателя и других рабочих параметров).
[00218] Приведенное выше описание относится к снегоходу 10, оснащенному БСТ 40 с пневматическим поршнем 94. Тем не менее, нужно понимать, что раскрытые способы управления могут быть применены и к другим транспортным средствам и устройствам, в которых используют БСТ. Также следует понимать, что поршень 94 можно приводить в действие гидравлически маслом или другими аналогичными несжимаемыми текучими средами, а не пневматически сжатым газом.
[00219] Специалистам в данной области техники могут быть очевидными изменения и улучшения, которые могут быть внесены в вышеописанные варианты осуществления настоящей технологии. Приведенное выше описание предназначено для рассмотрения в качестве примера, но не в ограничивающем смысле. Следовательно, объем настоящей технологии следует считать ограниченным исключительно объемом прилагаемой формулы изобретения.
Реферат
Изобретение относится к транспортным средствам. Способ управления бесступенчатой трансмиссией транспортного средства на различных высотах включает определение высоты; определение частоты вращения ведомого шкива; определение одного из положения органа управления газом и положения дроссельной заслонки; избирательно приводят в действие поршень для изменения эффективного диаметра ведущего шкива трансмиссии в зависимости от высоты; управляют усилием поршня в зависимости от частоты вращения ведомого шкива и одного из положения органа управления газом и положения дроссельной заслонки. Управляют усилием поршня так, чтобы оно было нулевым, если определенная высота превышает верхнее пороговое значение высоты. Повышается эффективность регулирования трансмиссии. 2 н. и 9 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления реактивной силой акселератора
Комментарии