Устройство управления реактивной силой акселератора - RU2466881C2
Код документа: RU2466881C2
Чертежи








Описание
Область техники
Настоящее изобретение относится устройству управления реактивной силой акселератора, которое управляет реактивной силой акселератора транспортного средства.
Уровень техники
В непрошедшей экспертизу опубликованной заявке на патент Японии № 2007-76468 (далее - Патентный Документ 1) раскрыт способ расчета оптимальной величины срабатывания (оптимальной величины нажатия) акселератора на основе дорожных условий, в которых движется транспортное средство. Оптимальная величина срабатывания представляет собой величину срабатывания, при которой можно добиться оптимального удельного потребления топлива. В соответствии с этим способом рассчитанная оптимальная величина срабатывания корректируется в соответствии с состоянием дороги перед транспортным средством. Когда водитель нажимает педаль акселератора и величина срабатывания становится близкой к скорректированной оптимальной величине нажатия, реактивная сила при нажатии акселератора ступенчато увеличивается. Согласно Патентному Документу 1 оптимальная величина срабатывания корректируется так, чтобы уменьшить оптимальную величину срабатывания, когда дорога перед транспортным средством идет под уклон или поворачивает.
Когда дорога перед транспортным средством идет под уклон, скорость транспортного средства обычно увеличивается, а дистанция до впереди идущего транспортного средства уменьшается. Следовательно, существует высокая вероятность в появлении необходимости нажать на педаль тормоза. Дополнительно, если дорога перед транспортным средством поворачивает, также существует высокая вероятность нажатия педали тормоза, чтобы улучшить управляемость транспортного средства, когда транспортное средство входит в поворот. Поэтому, согласно Патентному Документу 1, оптимальная величина срабатывания уменьшается, когда существует высокая вероятность нажатия педали тормоза, например, когда дорога перед транспортным средством идет под уклон или поворачивает. В результате скорость транспортного средства уменьшается и предотвращается движение этого транспортного средства по впереди лежащей дороге с чрезмерно высокой скоростью. Кроме того, можно предотвратить увеличение удельного расхода топлива.
В соответствии со способом, описанным в Патентном Документе 1, пороговую величину нажатия акселератора или скорость нажатия акселератора задают так, чтобы можно было получить оптимальное удельное потребление топлива, и при этом пороговом значении увеличивается реактивная сила акселератора. Однако акселератор является основным устройством, приводимым в действие водителем при управлении транспортным средством так, чтобы управлять транспортным средством так, как этого хочет водитель. Поэтому ощущение педали акселератора и его влияние на манеру управления транспортным средством непосредственно влияют на восприятие водителем транспортного средства в целом. Поэтому устройство управления реактивной силой, относящееся к такому типу, которое способствует снижению потребления топлива, невозможно использовать на практике, если такого снижения потребления топлива нельзя будет добиться, сохранив удовлетворительное ощущение педали акселератора и управляемости транспортного средства.
Были проведены различные испытания, направленные на внедрение в практику устройства управления реактивной силой, которое способствовало бы снижению потребления топлива. В результате этих испытаний было обнаружено, что водитель испытывает неприятные ощущения, когда реактивная сила просто увеличивается на пороговой величине нажатия акселератора или когда скорость нажатия задается с точки зрения уменьшения потребления топлива, как описано в Патентном Документе 1. Более конкретно в устройствах управления реактивной силой, относящихся к такому типу, реактивная сила на акселератор внезапно увеличивается, когда водитель пытается ускорить транспортное средство. Поэтому, например, когда движущая сила, необходимая для ускорения транспортного средства, относительно велика, транспортное средство невозможно ускорить так, как этого желает водитель, и это приводит к тому, что водитель испытывает неудобство.
Краткое описание изобретения
Согласно одному аспекту настоящего изобретения создано управляющее устройство для транспортного средства, содержащее средство для определения положения акселератора, средство для установки заданной пороговой величины для работы акселератора и средство для регулирования реактивной силы акселератора, при этом средство для регулировки выполнено с возможностью увеличения реактивной силы акселератора, когда величина нажатия акселератора превышает заданную пороговую величину, причем первое состояние транспортного средства, в котором скорость движения транспортного средства при заданной движущей силе изменяется с первой интенсивностью, содержит первую заданную пороговую величину нажатия акселератора для увеличения реактивной силы акселератора, а второе состояние транспортного средства, при котором скорость движения транспортного средства изменяется со второй интенсивностью, содержит вторую заданную пороговую величину нажатия акселератора для увеличения реактивной силы акселератора, при этом первая интенсивность изменения скорости транспортного средства ниже второй интенсивности изменения скорости транспортного средства, а первая заданная пороговая величина нажатия акселератора превышает вторую заданную пороговую величину нажатия акселератора.
Согласно другому аспекту настоящего изобретения предлагается управляющее устройство для транспортного средства, содержащее средство для измерения величины нажатия акселератора и средство для регулирования реактивной силы акселератора, причем средство для регулирования выполнено с возможностью увеличения реактивной силы акселератора, когда величина нажатия акселератора превышает пороговую величину, при этом первая пороговая величина соответствует первой движущей силе транспортного средства, а вторая пороговая величина соответствует второй движущей силе транспортного средства, превышающей первую движущую силу транспортного средства, причем первая пороговая величина превышает вторую пороговую величину.
Согласно другому аспекту настоящего изобретения предлагается способ управления транспортным средством, при котором измеряют величину нажатия акселератора, регулируют реактивную силу акселератора, увеличивают реактивную силу акселератора, когда величина нажатия акселератора превышает пороговую величину, и задают пороговую величину нажатия акселератора в ответ на измеренную движущую силу транспортного средства.
Согласно другому аспекту настоящего изобретения предлагается управляющее устройство для транспортного средства, содержащее датчик для измерения величины нажатия акселератора и контроллер для регулирования реактивной силы акселератора, причем контроллер выполнен с возможностью увеличения реактивной силы акселератора, когда величина нажатия акселератора превышает пороговую величину, причем первая пороговая величина соответствует первой движущей силе транспортного средства, а вторая пороговая величина соответствует второй движущей силе транспортного средства, которое превышает первую движущую силу транспортного средства, при этом первая пороговая величина превышает вторую пороговую величину.
Краткое описание чертежей
Признаки настоящего изобретения будут более понятны из нижеследующего описания, приведенного со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - схематическая иллюстрация системной структуры устройства управления реактивной силой акселератора согласно вариантам настоящего изобретения вместе с механизмом изменения реактивной силы;
Фиг.2 - схематическая иллюстрация механизма изменения реактивной силы согласно вариантам настоящего изобретения;
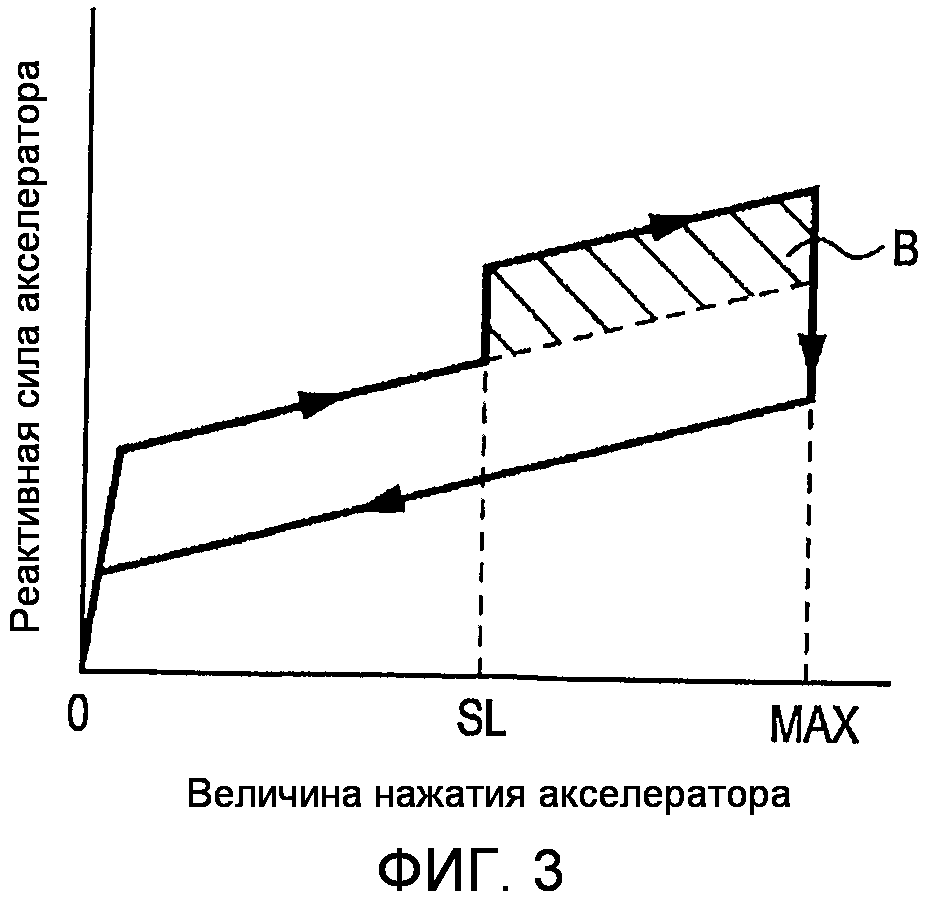
Фиг.3 - диаграмма характеристик реактивной силы акселератора согласно первому иллюстративному варианту настоящего изобретения;
Фиг.4 - диаграмма, иллюстрирующая взаимоотношение между пороговой величиной нажатия акселератора, движущей силой, полученной при максимальной величине нажатия акселератора, и сопротивлением движению;
Фиг.5 - диаграмма, иллюстрирующая способ, которым корректируют пороговую величину нажатия акселератора относительно скорости движения транспортного средства в соответствии с плотностью воздуха;
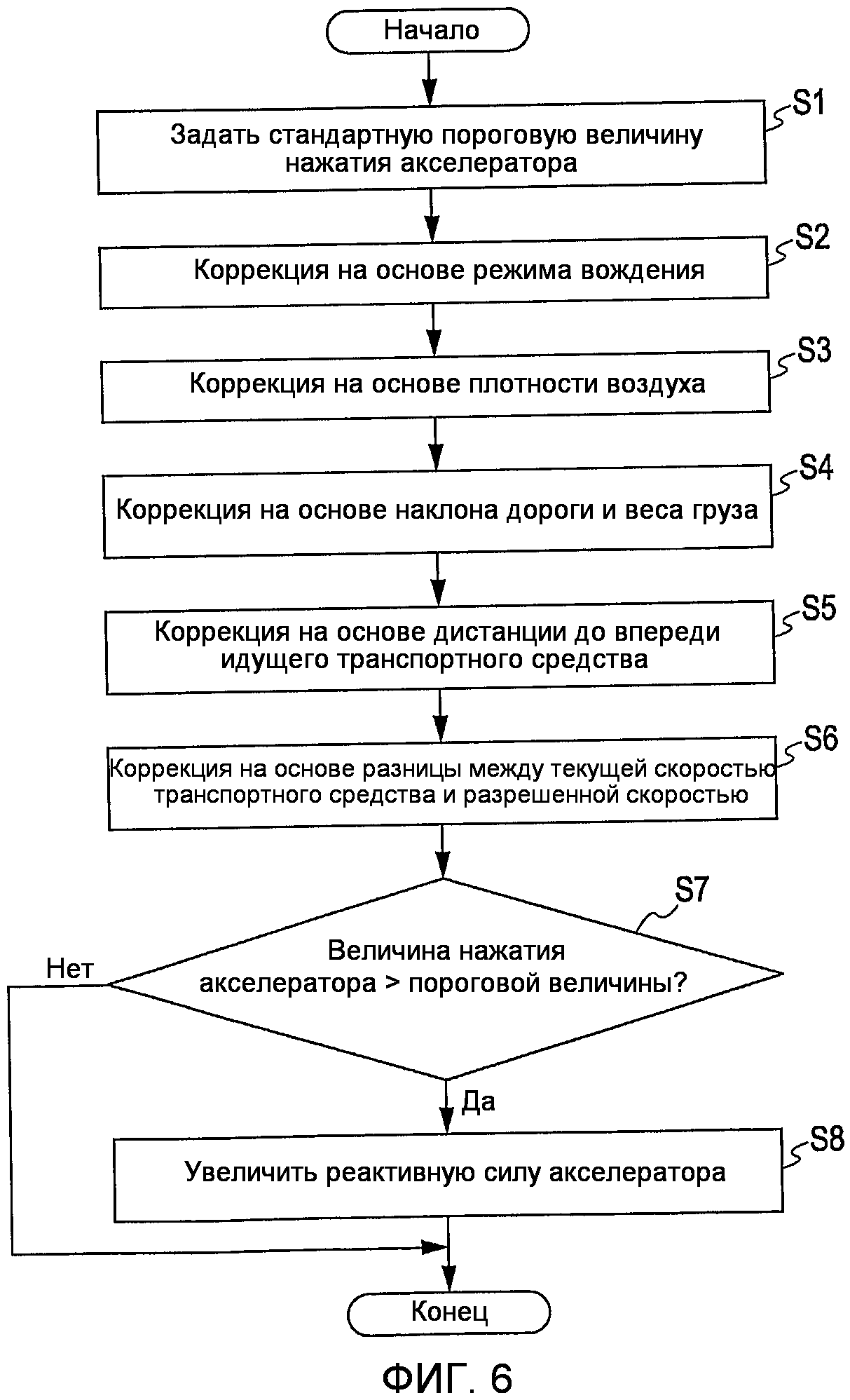
Фиг.6 - диаграмма последовательности процесса управления реактивной силой согласно первому иллюстративному варианту настоящего изобретения;
Фиг.7 - диаграмма, показывающая характеристики реактивной силы акселератора согласно второму иллюстративному варианту настоящего изобретения;
Фиг.8 - временная диаграмма, иллюстрирующая изменение скорости движения транспортного средства, величину изменения реактивной силы акселератора и величины нажатия акселератора после начала движения транспортного средства из остановленного состояния;
Фиг.9 - диаграмма, иллюстрирующая отношение между порогом изменения интенсивности, движущей силой при максимальной величине нажатия акселератора и сопротивлением движению;
Фиг.10 - диаграмма, иллюстрирующая способ, которым корректируется порог изменения интенсивности относительно скорости движения транспортного средства в соответствии с плотностью воздуха; и
Фиг.11 - диаграмма последовательности процесса управления реактивной силой согласно второму иллюстративному варианту настоящего изобретения.
Подробное описание изобретения
Далее следует подробное описание вариантов настоящего изобретения со ссылками на прилагаемые чертежи.
Устройство 100 управления реактивной силой акселератора по существу управляет реактивной силой (реактивной силой срабатывания) акселератора 2, установленной в кузове 1 транспортного средства (не показано). Хотя в настоящем описании используется термин "педаль акселератора" или "акселератор", следует понимать, что эти термины не ограничены каким-либо конкретным вариантом устройства ввода. В частности, хотя описывается "педаль", расположенная внутри пассажирского отсека, следует понимать, что "акселератором" может быть устройство, расположенное в моторном отсеке и реагирующее на электрические, гидравлические или механические сигналы, создаваемые педалью (или другим устройством), расположенной в пассажирском отсеке. Дополнительно, хотя устройство, расположенное в пассажирском отсеке, описывается как педаль, следует понимать, что в качестве "акселераторов" или устройств, посылающих сигналы на "акселератор", могут использоваться и другие регулирующие устройства (например, рычаги, переключатели, кнопки и т.п.). Как описано ниже, устройство 100 для регулирования реактивной силы акселератора может содержать средство для измерения величины открывания (величины нажатия) акселератора 2, установленного в транспортном средстве, средство для определения интенсивности изменения величины открывания (скорости нажатия) акселератора 2, установленного в транспортном средстве, и средство для изменения реактивной силы акселератора 2 относительно базовой реактивной силы. Базовая реактивная сила может быть рабочей реактивной силой, заданной относительно величины нажатия акселератора, как, например, в обычном акселераторе. Кроме того, базовая реактивная сила может задаваться так, чтобы увеличиваться в зависимости от роста величины нажатия акселератора приблизительно пропорционально. Когда величина нажатия акселератора 2 превышает заданный порог величины нажатия или когда интенсивность изменения величины нажатия акселератора 2 превышает заданный порог интенсивности изменения, реактивную силу акселератора 2 можно увеличить относительно величины базовой реактивной силы. Увеличенная реактивная сила равна базовой реактивной силе плюс величина добавленной реактивной силы. Поэтому разность между увеличенной реактивной силой и базовой реактивной силой при той же величине нажатия на акселератор является увеличением реактивной силы, создаваемым устройством управления реактивной силой педали акселератора. Базовая реактивная сила будет описана более подробно со ссылками на фиг.3.
Как показано на фиг.1 и 2, акселератор 2 может быть установлен на вращающемся валу 3 так, чтобы акселератор 2 мог поворачиваться вокруг вала 3. Акселератор 2 может принимать реактивную силу, направленную в сторону отпускания, от возвратной пружины 4, которая одним концом может быть прикреплена к кузову 1 транспортного средства, а вторым концом к вращающемуся валу 3. В качестве возвратной пружины 4 можно использовать пружины разных типов. Вращающийся вал 3 может поддерживаться с возможностью вращения подшипником 5, установленным на одном его конце и закрепленным на кузове транспортного средства. Датчик 6 положения акселератора, который может служить средством измерения величины нажатия акселератора и средством измерения изменения скорости нажатия акселератора, может быть установлен рядом с другим концом вращающегося вала 3. Датчик 6 положения акселератора может выдавать сигнал, соответствующий положению (величине нажатия) акселератора 2, а интенсивность изменения величины нажатия можно определить по количеству изменения величины нажатия за небольшой период времени.
В настоящем иллюстративном варианте величина нажатия акселератора 2 может быть привязана к величине открывания дроссельной заслонки (не показана) двигателя внутреннего сгорания (не показан) так, чтобы величина открывания дроссельной заслонки двигателя внутреннего сгорания увеличивалась в соответствии с величиной нажатия акселератора 2. Поэтому количество впрыскиваемого топлива (количество потребляемого топлива) увеличивается в соответствии с величиной нажатия акселератора.
Механизм 101 изменения реактивной силы может содержать узел 7 с переменной силой трения, который, в свою очередь, может содержать пару фрикционных элементов 7а и 7b, обращенных друг к другу, и которые могут прилагать силу трения, противодействующую вращению вала 3. Один фрикционный элемент 7а может быть механически зафиксирован на торцевой части вала 3, а другой фрикционный элемент 7b может быть установлен на фиксированном валу 8, снабженным шлицом или подобным устройством, так, чтобы фрикционный элемент 7b мог перемещаться в осевом направлении, но не мог вращаться. На кузове 1 транспортного средства может быть установлен силовой привод (например, соленоид) 9, выполненный с возможностью прижатия фрикционного элемента 7b к фрикционному элементу 7а.
В узле 7 с переменной силой трения силовой привод 9 может быть выполнен с возможностью перемещения фрикционного элемента 7b в осевом направлении (показанном стрелкой А1 на фиг.1) и, тем самым, изменять силу трения, возникающую между фрикционным элементом 7а и фрикционным элементом 7b. Работой силового привода 9 может управлять управляющий блок 10. Так, управляющий блок 10 может управлять работой силового привода 9 таким образом, чтобы изменять реактивную силу, приложенную к акселератору 2 при его нажатии, путем изменения силы трения, приложенной к валу 3.
Управляющий блок 10 может принимать сигналы от различных датчиков, включая датчик 6 положения акселератора, который определяет степень нажатия акселератора 2, датчика 11 ускорения, который определяет наклон дороги по наклону транспортного средства, датчика 12 атмосферного давления, датчика 13 температуры воздуха на впуске, датчика 14 скорости движения транспортного средства, датчика 15 давления на сиденье, установленного в сиденье (не показано) транспортного средства для определения наличия или отсутствия человека на этом сиденье, датчика 16 положения рычага переключения передач, который определяет передаточное отношение трансмиссии. Управляющий блок 10 также может получать информацию от навигационной системы 17 транспортного средства, которая может определять текущее положение транспортного средства и карту местности вокруг этого текущего положения, и сигнал от лазерного радара 18, который может определять дистанцию до впереди идущего транспортного средства.
Трансмиссия может быть, например, бесступенчатым вариатором с бесступенчато изменяющимся передаточным отношением. Однако трансмиссия может быть и автоматической трансмиссией, включая многоскоростную вспомогательную трансмиссию с гидротрансформатором или ручную коробку передач. Если используется бесступенчатый вариатор, то передаточное отношение можно определять как отношение между частотами вращения входного вала и выходного вала.
На фиг.3 схематически показана характеристика реактивной силы акселератора согласно первому иллюстративному варианту. Базовая реактивная сила изменяется по существу пропорционально величине нажатия акселератора с соответствующим гистерезисом в зависимости от того, работает ли акселератор в сторону увеличения или уменьшения величины нажатия. Когда величина нажатия акселератора увеличивается, то есть когда нажимается акселератор, и величина нажатия акселератора превышает заданную пороговую величину (на фиг.3 обозначенную позицией SL), реактивная сила акселератора ступенчато увеличивается относительно базовой реактивной силы. На фиг.3 заштрихованная область B соответствует увеличению реактивной силы акселератора. Когда реактивная сила акселератора увеличивается ступенчато, последующее нажатие акселератора 2 водителем подавляется, и водитель может получить информацию о том, что удельное потребление топлива является высоким (топливная экономичность является низкой).
Увеличение реактивной силы на акселераторе 2 при его движении в направлении нажатия можно немедленно отменить, когда, например, направление движения акселератора меняется на противоположное, т.е. в направлении отпускания. Альтернативно увеличение реактивной силы на акселераторе 2 для направления нажатия можно отменить, когда величина нажатия акселератора уменьшается и становится равной или меньшей, чем описанная выше заданная пороговая величина нажатия акселератора.
В настоящем иллюстративном варианте, как показано на фиг.4, управляющий блок 10 может менять пороговую величину нажатия акселератора, при которой реактивная сила на акселераторе 2 увеличивается, способом, описанным ниже. То есть пороговая величина нажатия акселератора может изменяться в соответствии со скоростью движения транспортного средства в тот момент времени, когда водитель начинает нажимать на акселератор, то есть в соответствии с начальной скоростью движения транспортного средства в момент, когда акселератор 2 нажимается из полностью отпущенного положения или из частично нажатого положения. Более конкретно, если скорость движения транспортного средства в момент, когда начинается нажатие акселератора, невысока, можно выбрать первую пороговую величину нажатия акселератора, которая относительно невелика. Если скорость движения транспортного средства во время начала нажатия акселератора высока, можно выбрать вторую, относительно большую пороговую величину нажатия акселератора.
Когда скорость движения транспортного средства при начале нажатия акселератора 2 является низкой, реактивную силу можно увеличить при относительно малой величине нажатия акселератора. Следовательно, диапазон увеличения реактивной силы между пороговой величиной нажатия акселератора и максимальной величиной нажатия акселератора является большим. Наоборот, когда скорость движения транспортного средства при начале нажатия акселератора 2 является высокой, реактивная сила не увеличивается, пока величина нажатия акселератора не превысит относительно высокую пороговую величину. Следовательно, диапазон между величиной нажатия акселератора в полностью отпущенном положении и пороговой величиной нажатия акселератора, и в котором реактивная сила не увеличивается, является относительно большим.
В диапазоне между первой пороговой величиной нажатия акселератора и второй пороговой величиной нажатия акселератора пороговая величина нажатия акселератора может постоянно меняться с первой пороговой величины на вторую пороговую величину в соответствии со скоростью движения транспортного средства, как показано на фиг.4.
На фиг.4 приведена диаграмма, иллюстрирующая отношение между пороговой величиной нажатия акселератора, характеристикой движущей силы при максимальной величине нажатия акселератора, полученной, исходя из предположения, что управление изменением скорости осуществляется соответственно, и сопротивлением движению относительно скорости транспортного средства, представленной по горизонтальной оси. Как показано на фиг.4, в диапазоне низких скоростей движения транспортного средства, который соответствует, например, периоду непосредственно после старта транспортного средства из остановленного положения, передаточное отношение трансмиссии является высоким. Следовательно, движущая сила транспортного средства, полученная при максимальном нажатии акселератора, относительно велика. Поскольку генерируется большая движущая сила транспортного средства, даже если величина нажатия акселератора мала, существует высокая вероятность того, что будет сгенерирована избыточная движущая сила транспортного средства и может возникнуть ненужное ускорение. Следовательно, в диапазоне низких скоростей движения транспортного средства пороговую величину нажатия акселератора можно задавать относительно малой. Поскольку реактивная сила акселератора 2 увеличивается при относительно небольшой величине нажатия акселератора, можно предотвратить чрезмерное нажатие акселератора 2 водителем и сократить общее потребление топлива.
В диапазоне от промежуточной до высокой скорости движения транспортного средства передаточное отношение трансмиссии является низким. Следовательно, движущая сила транспортного средства, полученная при максимальной величине нажатия акселератора, относительно невелика, и величина повышения движущей силы транспортного средства, соответствующая определенной величине нажатия акселератора, также относительно невелика. Следовательно, ненужное ускорение легко не создается. Кроме того, в диапазоне от промежуточной до высокой скорости движения транспортного средства сопротивление движению (сопротивление воздуха и сопротивление качению) транспортного средства велико и, следовательно, для поддержания скорости транспортного средства может потребоваться большая движущая сила. Кроме того, запас движущей силы, который является разностью между движущей силой транспортного средства при максимальной величине нажатия акселератора и сопротивлением движению, невелик. Если реактивная сила акселератора 2 в этом состоянии увеличивается, водителю становится трудно нажимать дальше акселератор 2, и транспортное средство не может ускоряться. Следовательно, в диапазоне от промежуточной до высокой скорости транспортного средства порог величины нажатия акселератора может быть задан как вторая, относительно высокая пороговая величина. Поэтому реактивную силу можно поддерживать на базовой величине, позволяющей быстро нажать акселератор 2, до тех пор, пока величина нажатия акселератора не превысит относительно большую величину нажатия. В результате транспортное средство можно ускорять плавно.
Пороговая величина нажатия акселератора может бесступенчато изменяться между первой пороговой величиной и второй пороговой величиной в соответствии со скоростью транспортного средства. Следовательно, водитель может нажимать акселератор 2, не испытывая неприятных ощущений. Даже когда скорость транспортного средства находится на границе между диапазоном низких скоростей и диапазоном от промежуточной до высокой скорости, пороговая величина нажатия акселератора не изменяется ступенчато при определенной скорости транспортного средства. Следовательно, водитель может нажимать акселератор 2, не испытывая неприятных ощущений. В вышеописанном иллюстративном варианте пороговая величина нажатия акселератора может задаваться как две пороговые величины, то есть как первая пороговая величина и вторая пороговая величина. Однако настоящее изобретение не ограничивается этим, и пороговая величина нажатия акселератора может задаваться как три или более пороговые величины. Альтернативно пороговая величина нажатия акселератора может быть задана так, чтобы эта пороговая величина нажатия акселератора бесступенчато изменялась во всем диапазоне скоростей движения транспортного средства.
В вышеописанном иллюстративном примере скорость транспортного средства используется как параметр, показывающий характеристики сопротивления движению транспортного средства и движущей силы при максимальной величине нажатия акселератора. Следовательно, пороговая величина нажатия акселератора по существу задается с учетом как сопротивления движению транспортного средства, так и движущей силы транспортного средства при максимальной величине нажатия акселератора. Однако пороговая величина нажатия акселератора также может задаваться на основе только характеристики движущей силы транспортного средства при максимальной величине нажатия акселератора. Например, в качестве параметра, показывающего характеристику движущей силы при максимальной величине нажатия акселератора, можно использовать передаточное отношение трансмиссии, и пороговая величина нажатия акселератора может задаваться в соответствии с текущим передаточным отношением. На фиг.4 показана характеристика движущей силы при максимальной величине нажатия акселератора, когда, например, трансмиссией является бесступенчатый вариатор. Характеристика движущей силы относительно скорости транспортного средства при использовании автоматической трансмиссии, включая многоступенчатую вспомогательную трансмиссию или ручную трансмиссию, по существу подобна характеристике движущей силы, показанной на фиг.4. Более конкретно движущая сила транспортного средства велика в диапазоне низких скоростей, поскольку используется высокое передаточное отношение, а в диапазоне от промежуточной скорости до высокой скорости движущая сила транспортного средства невелика, поскольку используется низкое передаточное отношение. Следовательно, когда, например, в качестве трансмиссии используется многоступенчатая трансмиссия, пороговая величина нажатия акселератора может выбираться из множества пороговых величин в соответствии с передаточным отношением трансмиссии.
Пороговая величина нажатия акселератора также может задаваться с использованием другого параметра вместо скорости транспортного средства, являющейся параметром, показывающим сопротивление движению. Например, сопротивление движению транспортного средства увеличивается, когда наклон дороги (знак наклона является положительным, когда дорога поднимается) является крутым или когда транспортное средство перевозит тяжелый груз (например, большое количество пассажиров на борту). Следовательно, пороговая величина нажатия акселератора может быть задана выше, чем пороговая величина, когда наклон дороги менее крут. Дополнительно пороговая величина нажатия акселератора для большой загрузки транспортного средства может задаваться более высокой, чем пороговая величина для мало загруженного транспортного средства.
Наклон дороги можно определить по величине, полученной от датчика 11 ускорения (средство измерения наклона). Когда от навигационной системы 17 транспортного средства можно получить данные о текущем положении и карту окружающей местности, наклон дороги, по которой в данный момент движется транспортное средство, можно определить по информации, содержащейся на карте. Количество пассажиров можно определить, например, по сигналу от датчика 15 давления на сиденье, помещенного в каждое сиденье (средство определения веса груза).
Как описано выше, пороговая величина нажатия акселератора может задаваться на основе сопротивления движению транспортного средства или характеристики движущей силы при максимальной величине нажатия акселератора. Определенная пороговая величина нажатия акселератора также может корректироваться в соответствии с другими факторами, как показано на фиг.5. Пороговая величина нажатия акселератора может корректироваться, например, в соответствии с плотностью воздуха, поступающего в двигатель внутреннего сгорания, режимом вождения, например спортивным режимом или экономичным режимом, дистанцией до впереди идущего транспортного средства или разницей между текущей скоростью и разрешенной скоростью.
Коррекцию на основе плотности воздуха можно выполнять для компенсации падения мощности двигателя внутреннего сгорания, вызванного уменьшенной плотностью воздуха, что может происходить на большой высоте над уровнем моря или при высокой температуре воздуха. Как показано штриховой линией на фиг.5, пороговая величина нажатия акселератора увеличивается по мере уменьшения плотности воздуха. Плотность воздуха можно определить известным способом измерения на основе атмосферного давления и температуры окружающей среды в месте текущего положения транспортного средства (средством измерения плотности воздуха). Высота текущего положения транспортного средства над уровнем моря может быть рассчитана по результатам измерений датчика 12 атмосферного давления. Альтернативно, когда от навигационной системы 17 транспортного средства можно получить информацию о текущем положении и окружающей местности, высоту над уровнем моря можно получить из информации на карте. Температуру окружающей среды можно определить по результатам измерений датчика 13 температуры воздуха на впуске. Плотность воздуха также можно определить непосредственно по результатам измерений датчика 12 атмосферного давления.
Что касается коррекции на основе режима вождения, пороговая величина нажатия акселератора увеличивается, как в случае, показанном на фиг.5, когда текущий режим требует высоких характеристик ускорения. Как хорошо известно, в соответствии с режимом вождения может меняться алгоритм переключения передач автоматической трансмиссии.
Когда, например, транспортное средство снабжено селектором 19 режима вождения, режим вождения транспортного средства можно легко определить по положению этого селектора 19 (средство определения режима вождения). Пороговая величина нажатия акселератора для режима вождения, требующего высоких ускорений (например, для спортивного режима), выбираемого селектором, может быть задана более высокой, чем пороговая величина для нормального режима вождения. Альтернативно можно изучить манеру вождения водителя по его водительской истории и определить, что этот водитель предпочитает стиль вождения, требующий высоких ускорений, если водитель стремится нажимать на акселератор 2 с большей величиной. В таком случае можно предположить, что постоянно выбран режим вождения, требующий высоких ускорений.
Что касается коррекции на основе дистанции до впереди идущего транспортного средства, то пороговая величина нажатия акселератора может увеличиваться с увеличением этой дистанции.
Дистанцию до впереди идущего транспортного средства можно определить с помощью устройства для определения дистанции, в котором используется лазерный радар 18. Устройство для определения дистанции определяет дистанцию до впереди идущего транспортного средства, излучая лазерный луч в сторону впереди идущего автомобиля и принимая отраженный от него лазерный луч.
Пороговая величина нажатия акселератора также может корректироваться на основе разности между текущей скоростью транспортного средства и разрешенной скоростью на дороге, по которой в это время движется транспортное средство. Здесь предполагается, что текущая скорость транспортного средства ниже разрешенной скорости. В этом случае информацию о текущем положении и карту местности, прилегающей к текущему положению, можно получить от автомобильной навигационной системы 17, а разрешенная скорость для дороги, по которой движется транспортное средство, определяется по информации на карте (средство определения разрешенной скорости). Предполагая, что текущая скорость транспортного средства не превышает разрешенную для той дороги, по которой оно движется, коррекцию можно осуществлять так, чтобы пороговая величина нажатия акселератора увеличивалась с увеличением разницы между разрешенной скоростью и текущей скоростью. Такая коррекция может выполняться для плавного ускорения для разрешенной скорости и для предотвращения ускорения, когда скорость транспортного средства равна разрешенной или превышает ее.
Таким образом, пороговая величина нажатия акселератора, определенная на основе сопротивления движению или на основе характеристики движущей силы при максимальной величине нажатия акселератора, может корректироваться на основе, например, плотности воздуха, режима вождения, дистанции до впереди идущего транспортного средства, или разницы между текущей скоростью и разрешенной скоростью. Поэтому реактивную силу на акселераторе 2 можно адекватно увеличить, и транспортное средство можно вести плавно в соответствии с намерениями водителя.
Следовательно, можно предотвратить возникновение проблемы, при которой транспортное средство не может ускориться, как того желает водитель, когда, например, для ускорения транспортного средства нужна относительно большая движущая сила. Кроме того, можно предотвратить возникновение у водителя неправильного впечатления о транспортном средстве, как якобы имеющем плохие характеристики ускорения.
На фиг.6 приведена диаграмма последовательности процесса управления реактивной силой на акселераторе согласно настоящему изобретению. Дополнительно следует описание этой диаграммы последовательности.
На этапе 1 определяют скорость транспортного средства в момент начала увеличения величины нажатия акселератора. Затем задают стандартную (базовую) пороговую величину нажатия акселератора в соответствии со скоростью транспортного средства, как описано выше.
На этапе 2 пороговая величина нажатия акселератора может корректироваться в соответствии с режимом вождения. Более конкретно стандартная пороговая величина нажатия акселератора, полученная на этапе 1, может корректироваться так, что эта пороговая величина увеличивается, если текущий режим вождения является режимом, требующим высоких характеристик ускорения.
На этапе 3 пороговая величина нажатия акселератора может корректироваться в соответствии с плотностью атмосферного воздуха. Более конкретно пороговая величина нажатия акселератора может дополнительно корректироваться так, чтобы пороговая величина нажатия акселератора увеличивалась с уменьшением плотности атмосферного воздуха.
На этапе 4 выполняется коррекция, основанная на наклоне дороги, по которой в данный момент движется транспортное средство, и на весе груза транспортного средства. Более конкретно пороговая величина нажатия акселератора может дополнительно корректироваться так, что пороговая величина нажатия акселератора увеличивается с увеличением наклона дороги и с увеличением веса груза.
На этапе 5 выполняется коррекция на основании дистанции до впереди идущего транспортного средства. Более конкретно пороговая величина нажатия акселератора может корректироваться так, чтобы пороговая величина нажатия акселератора увеличивалась с увеличением дистанции до впереди идущего транспортного средства.
На этапе 6 выполняется коррекция, основанная на разнице между текущей скоростью транспортного средства и разрешенной скоростью. Более конкретно предполагая, что текущая скорость транспортного средства ниже разрешенной для той дороги, по которой движется транспортное средство, пороговая величина нажатия акселератора может быть дополнительно скорректирована так, чтобы пороговая величина нажатия акселератора увеличивалась с увеличением разницы между разрешенной скоростью и текущей скоростью транспортного средства.
На этапах 2-6 коррекции могут выполняться соответствующими способами, например умножением на коэффициент коррекции или сложением с величиной коррекции.
На этапе 7 фактическую величину нажатия акселератора 2, которая может измеряться постоянно, сравнивают с окончательной пороговой величиной нажатия акселератора, определенной выполнением этапов 1-7. Если величина нажатия акселератора 2 больше, чем эта пороговая величина, процесс переходит на этап 8, на котором реактивную силу акселератора 2 увеличивают относительно базовой реактивной силы.
В вышеописанном иллюстративном примере пороговая величина нажатия акселератора задается в соответствии с начальной скоростью транспортного средства в момент, когда акселератор 2 приводится в действие водителем в направлении увеличения величины нажатия (когда акселератор 2 нажимают из полностью отпущенного положения или из частично нажатого положения). Однако пороговая величина нажатия акселератора также может задаваться путем постоянного измерения скорости транспортного средства, когда величина нажатия акселератора 2 увеличивается.
На фиг.7 схематически показана характеристика реактивной силы акселератора согласно второму иллюстративному варианту. Базовая реактивная сила может по существу меняться пропорционально величине нажатия акселератора с соответствующим гистерезисом, в зависимости от нажатия или отпускания акселератора. Когда величина нажатия акселератора увеличивается, то есть когда на акселератор нажимают, реактивная сила акселератора может ступенчато увеличиваться относительно базовой реактивной силы, как показано штриховой линией, при условии, что величина нажатия акселератора превышает заданную пороговую величину, и интенсивность изменения величины нажатия акселератора превышает заданный порог интенсивности нажатия.
На фиг.8 приведена временная диаграмма, иллюстрирующая пример, в котором реактивную силу акселератора увеличивают в соответствии с интенсивностью изменения величины нажатия акселератора после старта транспортного средства из остановленного состояния. Когда транспортное средство трогается из остановленного состояния, если скорость нажатия на акселератор 2, то есть интенсивность изменения величины нажатия акселератора, выше заданной пороговой величины интенсивности такого изменения, реактивную силу акселератора 2 можно увеличить, как показано сплошной линией на фиг.8. Если скорость нажатия на акселератор 2, то есть интенсивность изменения величины нажатия акселератора, ниже заданной пороговой величины интенсивности такого изменения, то реактивную силу акселератора 2 можно не увеличивать, как показано штриховой линией на фиг.8.
Увеличение реактивной силы акселератора 2 для направления увеличения величины его нажатия можно немедленно отменить, когда, например, направление нажатия акселератора меняется на направление отпускания, или, когда величина нажатия акселератора уменьшается и становится равной описанной выше пороговой величине нажатия или меньше ее. Здесь скорость нажатия акселератора 2, то есть интенсивность изменения величины нажатия акселератора, является скоростью измерения величины нажатия акселератора во времени и представлена наклоном кривой величины нажатия акселератора на фиг.8. Если этот наклон мал, то это значит, что акселератор 2 нажимается медленно. Если наклон крут, то это значит, что акселератор нажимается быстро.
Как показано на фиг.9, в настоящем иллюстративном варианте управляющий блок 10 может изменять пороговую величину интенсивности изменения, при которой реактивная сила акселератора 2 увеличивается, следующим образом. Пороговая величина интенсивности изменения может изменяться в соответствии со скоростью транспортного средства в момент, когда водитель начинает нажимать на акселератор, то есть в соответствии с начальной скоростью транспортного средства в момент нажатия на акселератор из полностью отпущенного положения или из частично нажатого положения. Более конкретно, если скорость транспортного средства в момент, когда начинается увеличение величины нажатия акселератора, невелика, можно выбрать первую, относительно небольшую пороговую величину интенсивности изменения. Если скорость транспортного средства в момент, когда начинается увеличение величины нажатия акселератора, высока, можно выбрать вторую, относительно высокую пороговую величину интенсивности изменения.
Если в начале нажатия акселератора 2 скорость транспортного средства невелика, реактивную силу можно увеличить при относительно невысокой интенсивности нажатия акселератора. Следовательно, диапазон увеличения реактивной силы, показанный заштрихованной областью на фиг.9, велик. Наоборот, если в начале нажатия акселератора 2 транспортное средство движется с высокой скоростью, реактивную силу нельзя увеличивать, пока интенсивность нажатия акселератора не превысит относительно высокое пороговое значение. Следовательно, диапазон, в котором реактивная сила не увеличивается, является относительно большим.
В диапазоне между первой пороговой величиной интенсивности нажатия и второй пороговой величиной интенсивности нажатия эта пороговая величина может бесступенчато изменяться от первой пороговой величины интенсивности нажатия до второй пороговой величины интенсивности нажатия в соответствии со скоростью движения транспортного средства, как показано на фиг.9.
На фиг.9 представлена схематическая диаграмма, иллюстрирующая соотношение между пороговой величиной интенсивности нажатия, характеристикой движущей силы при максимальной величине нажатия, полученной, исходя из предположения, что управление скоростью осуществляется соответственно, и сопротивлением движению относительно скорости транспортного средства, отложенной по горизонтальной оси. Как показано на фиг.9, в диапазоне низких скоростей транспортного средства, который соответствует, например, периоду непосредственно после начала движения транспортного средства из остановленного состояния, передаточное отношение трансмиссии является высоким. Следовательно, движущая сила транспортного средства, полученная при максимальной величине нажатия акселератора, велика. Поскольку большая движущая сила транспортного средства генерируется даже при небольшом нажатии акселератора, существует высокая вероятность того, что может возникнуть избыточная движущая сила транспортного средства, и транспортное средство будет двигаться с ненужным ускорением. Следовательно, при низких скоростях транспортного средства пороговую величину интенсивности нажатия можно задавать как первую, относительно низкую пороговую величину. Поскольку реактивная сила акселератора 2 увеличивается при относительно низкой интенсивности нажатия, можно предотвратить чрезмерное нажатие акселератора 2 водителем и снизить общее потребление топлива.
В диапазоне от промежуточной до высокой скорости транспортного средства передаточное отношение трансмиссии невысоко. Следовательно, движущая сила транспортного средства, полученная при максимальной величине нажатия акселератора, невелика, и степень увеличения движущей силы транспортного средства, соответствующая определенной величине нажатия акселератора, также относительно невелика. Следовательно, снижается вероятность возникновения ненужного ускорения. Кроме того, в диапазоне от промежуточной до высокой скорости транспортного средства сопротивление движению (сопротивление воздуха и сопротивление качению) транспортного средства высоко и, следовательно, для поддержания скорости транспортного средства требуется большая движущая сила. Кроме того, запас движущей силы, который является разницей между движущей силой транспортного средства при максимальной величине нажатия акселератора и сопротивлением движению, невелик. Если реактивная сила акселератора 2 в этом состоянии увеличивается, водитель может испытывать затруднения при дальнейшем нажатии акселератора 2, и транспортное средство не сможет ускориться. Следовательно, в диапазоне от промежуточной до высокой скорости транспортного средства пороговая величина интенсивности нажатия акселератора задается как относительно высокая вторая пороговая величина. Поэтому реактивную силу можно поддерживать на базовой величине, которая позволяет быстро нажимать на акселератора 2, пока интенсивность нажатия не превысит относительно высокую пороговую величину. В результате транспортное средство можно плавно ускорять.
Пороговая величина интенсивности нажатия акселератора может бесступенчато изменяться между первой пороговой величиной и второй пороговой величиной в соответствии со скоростью транспортного средства. Следовательно, акселератор 2 можно нажимать так, что водитель не испытывает неприятных ощущений. Даже когда скорость транспортного средства находится на границе между диапазоном низких скоростей и диапазоном от промежуточной до высокой скорости, пороговая величина интенсивности нажатия акселератора не изменяется ступенчато при определенной скорости движения транспортного средства. Следовательно, акселератор 2 можно нажимать так, что водитель не испытывает неприятных ощущений. В вышеописанном иллюстративном варианте пороговая величина интенсивности нажатия акселератора задается на основе двух значений, то есть между первой пороговой величиной и второй пороговой величиной интенсивности нажатия акселератора. Однако настоящее изобретение этим не ограничено, и пороговая величина интенсивности нажатия акселератора может задаваться так, чтобы она бесступенчато изменялась во всем диапазоне скоростей движения транспортного средства.
В вышеописанном иллюстративном варианте скорость движения транспортного средства используется как параметр, который показывает сопротивление движению автомобиля и характеристику движущей силы при максимальной величине нажатия акселератора. Поэтому пороговую величину интенсивности нажатия акселератора по существу задают с учетом как сопротивления движению транспортного средства, так и характеристики движущей силы при максимальной величине нажатия акселератора. Однако пороговую величину интенсивности нажатия акселератора также можно задавать на основе только характеристики движущей силы при максимальной величине нажатия акселератора. Например, в качестве параметра, показывающего характеристику движущей силы при максимальной величине нажатия акселератора, можно использовать передаточное отношение трансмиссии, и пороговую величину интенсивности нажатия акселератора можно задавать в соответствии с текущим передаточным отношением. На фиг.9 показана характеристика движущей силы при максимальной величине нажатия акселератора в случае, когда, например, трансмиссией является бесступенчатый вариатор. Характеристика движущей силы относительно скорости транспортного средства, когда трансмиссией является автоматическая трансмиссия, включая многоступенчатую вспомогательную трансмиссию, или ручная трансмиссия, в основном подобна характеристике, показанной на фиг.9. Более конкретно движущая сила транспортного средства велика в диапазоне низких скоростей движения транспортного средства, поскольку передаточное отношение высоко, и мала в диапазоне от промежуточной до высокой скорости транспортного средства, поскольку передаточное отношение низко. Следовательно, когда, например, трансмиссия является многоступенчатой трансмиссией, пороговую величину интенсивности нажатия акселератора можно выбирать из множества величин в соответствии с передаточным отношением трансмиссии.
Пороговую величину интенсивности нажатия акселератора также можно задавать, используя не скорость транспортного средства, а другой параметр, показывающий сопротивление движению. Например, сопротивление движению транспортного средства увеличивается, когда наклон дороги велик (знак наклона является положительным для поднимающейся дороги), или когда велик вес груза транспортного средства (например, при большом количестве пассажиров). Следовательно, пороговая величина интенсивности нажатия акселератора на крутом подъеме может быть задана более высокой чем эта пороговая величина на менее крутом участке подъема. Кроме того, пороговая величина интенсивности нажатия акселератора для большого веса груза может задаваться более высокой, чем для малого веса груза.
Как описано выше, пороговую величину интенсивности нажатия акселератора можно задавать на основе сопротивления движению транспортного средства или характеристики движущей силы при максимальной величине нажатия акселератора. Рассчитанная пороговая величина интенсивности нажатия акселератора также может корректироваться в соответствии с другими факторами, как показано на фиг.5. Пороговая величина интенсивности нажатия акселератора может корректироваться, например, в соответствии с плотностью воздуха, поступающего в двигатель внутреннего сгорания, с режимом вождения, например спортивным и экономичным, с дистанцией до впереди идущего транспортного средства или в соответствии с разницей между текущей скоростью и разрешенной скоростью.
Коррекция на основе плотности воздуха может осуществляться для компенсации падения мощности двигателя внутреннего сгорания, вызванного уменьшением плотности воздуха, которая может возникать на большой высоте над уровнем моря или при высокой температуре окружающей среды. Как показано штриховой линией на фиг.10, при падении плотности воздуха пороговая величина интенсивности нажатия акселератора увеличивается.
Что касается коррекции, осуществляемой на основе режима вождения, то пороговая величина интенсивности нажатия акселератора может увеличиваться, как показано на фиг.10, когда выбран режим вождения, требующий высоких характеристик ускорения.
При введении коррекции на основе дистанции до впереди идущего транспортного средства пороговая величина интенсивности нажатия акселератора увеличивается с увеличением этой дистанции.
Пороговая величина интенсивности нажатия акселератора может также корректироваться на основе разницы между текущей скоростью транспортного средства и разрешенной скоростью на дороге, по которой в этот момент движется транспортное средство. Предполагая, что текущая скорость транспортного средства ниже, чем разрешенная скорость, коррекцию можно осуществлять так, чтобы пороговая величина интенсивности нажатия акселератора увеличивалась с увеличением разницы между разрешенной скоростью и текущей скоростью транспортного средства.
Таким образом, пороговая величина интенсивности нажатия акселератора, определенная на основе сопротивления движению или на основе характеристики движущей силы при максимальной величине нажатия акселератора может корректироваться на основе, например, плотности воздуха, режима вождения, дистанции до впереди идущего транспортного средства, и разницы между текущей скоростью транспортного средства и разрешенной скоростью. Поэтому реактивная сила акселератора 2 может адекватно увеличиваться, и транспортным средством можно плавно управлять в соответствии с намерениями водителя.
На фиг.11 представлена диаграмма последовательности процесса управления реактивной силой согласно настоящему варианту. Далее следует описание этой диаграммы последовательности.
Сначала на этапе 11 определяют, превышает ли текущее положение акселератора 2, то есть текущая величина нажатия акселератора, заданную пороговую величину нажатия. Если текущая величина нажатия акселератора превышает заданную пороговую величину, процесс переходит на этап 12. Если текущая величина нажатия акселератора не превышает заданную пороговую величину или равна ей, подпрограмма прерывается. Если величина нажатия акселератора достаточно мала, не возникает ускорения, ухудшающего топливную экономичность. Следовательно, согласно данному иллюстративному варианту процесс увеличения реактивной силы не выполняется независимо от интенсивности нажатия акселератора.
На этапе 12 измеряют скорость транспортного средства в момент начала нажатия акселератора. Затем задают стандартную (базовую) пороговую величину интенсивности нажатия в соответствии со скоростью транспортного средства, как описано выше.
На этапе 13 пороговую величину интенсивности нажатия акселератора корректируют в соответствии с режимом вождения. Более конкретно, стандартную пороговую величину интенсивности нажатия, рассчитанную на этапе 12, корректируют так, чтобы эта пороговая величина увеличивалась, если текущий режим вождения требует высоких характеристик ускорения.
На этапе 14 пороговую величину интенсивности нажатия корректируют в соответствии с плотностью атмосферного воздуха. Более конкретно пороговую величину интенсивности нажатия дополнительно корректируют так, чтобы эта величина увеличивалась с уменьшением плотности атмосферного воздуха.
На этапе 15 выполняют коррекцию на основе наклона дороги, по которой движется транспортное средство, и веса груза, перевозимого транспортным средством. Более конкретно пороговая величина интенсивности нажатия акселератора дополнительно корректируется так, чтобы увеличиваться с увеличением крутизны подъема и с увеличением веса груза.
На этапе 16 выполняют коррекцию на основе дистанции до впереди идущего транспортного средства. Более конкретно пороговая величина интенсивности нажатия акселератора увеличивается с увеличением дистанции до впереди идущего транспортного средства.
На этапе 17 выполняют коррекцию на основе разницы между текущей скоростью транспортного средства и разрешенной скоростью. Более конкретно, предполагая, что текущая скорость транспортного средства ниже разрешенной на той дороге, по которой в данный момент движется транспортное средство, пороговую величину интенсивности нажатия акселератора дополнительно корректируют так, чтобы эта пороговая величина увеличивалась с увеличением разницы между разрешенной скоростью и текущей скоростью транспортного средства.
На этапах 13-17 коррекцию можно выполнять соответствующими способами, например умножением на корректирующий коэффициент или сложением с корректирующей величиной.
На этапе 18 сравнивают фактическую интенсивность изменения величины нажатия акселератора 2, которую рассчитывают постоянно, с окончательной пороговой величиной, рассчитанной на этапах 12-17. Если интенсивность изменения величины нажатия акселератора 2 больше пороговой величины, процесс переходит на этап 19, на котором реактивную силу акселератора увеличивают относительно базовой реактивной силы.
В вышеописанном иллюстративном варианте пороговая величина интенсивности нажатия акселератора задается в соответствии с начальной скоростью транспортного средства в момент, когда водитель приводит в действие акселератор в направлении увеличения величины нажатия (когда водитель нажимает акселератор из полностью отпущенного положения или из частично нажатого положения). Однако пороговая величина интенсивности нажатия акселератора также может задаваться путем непрерывного измерения скорости транспортного средства при увеличении величины нажатия акселератора 2.
Удельный расход топлива меняется в соответствии с величиной нажатия акселератора 2, и мгновенный удельный расход топлива можно рассчитать по величине нажатия акселератора 2 и интенсивности ее нажатия. Расчетную величину удельного расхода топлива можно вывести на приборную панель перед сиденьем водителя или на автомобильную навигационную систему. В таком случае водитель может управлять транспортным средством, получая визуальное подтверждение увеличения реактивной силы на акселераторе 2, когда ухудшается топливная экономичность. Таким образом можно эффективно снизить расход топлива.
В вышеописанных иллюстративных вариантах реактивная сила увеличивается в соответствии с величиной нажатия акселератора или интенсивностью его нажатия, что влияет на расход топлива. Однако настоящее изобретение также можно использовать, когда пороговая величина задается непосредственно для удельного расхода топлива, и реактивная сила увеличивается, когда текущий удельный расход топлива превышает пороговую величину.
Кроме того, согласно вышеописанным иллюстративным вариантам положение акселератора 2 (степень утапливания) измеряется как величина нажатия акселератора. Следовательно, в вышеописанном иллюстративном варианте степень утапливания акселератора 2 по существу эквивалентна величине нажатия, а интенсивность изменения положения акселератора 2 по существу эквивалентна интенсивности нажатия акселератора. Однако управляющая операция согласно настоящему изобретению также может осуществляться путем использования, например, угла открытия дроссельной заслонки, которая функционально соединена с акселератором 2 и который представляет величину нажатия акселератора.
Транспортное средство, в котором используется устройство для управления реактивной силой акселератора, не ограничивается транспортным средством, в котором источником движущей силы является двигатель внутреннего сгорания. Например, устройство управления реактивной силой акселератора согласно настоящему изобретению также может использоваться в электромобилях или в гибридных автомобилях.
Преимущественно устройство управления реактивной силой акселератора может задавать реактивную силу большую, чем базовая реактивная сила, когда величина нажатия акселератора превышает пороговую величину нажатия или когда интенсивность нажатия акселератора превышает пороговую заданную величину интенсивности нажатия. Пороговая величина нажатия акселератора или пороговая величина интенсивности нажатия могут задаваться с учетом характеристик движущей силы транспортного средства при заданной величине нажатия акселератора.
Преимущественно пороговая величина нажатия акселератора может задаваться в соответствии с характеристиками движущей силы транспортного средства. Пороговая величина нажатия акселератора или пороговая величина интенсивности нажатия акселератора для случаев, когда движущая сила транспортного средства при заданной величине нажатия акселератора относительно невелика, может быть более высокой, чем пороговая величина нажатия акселератора, когда движущая сила транспортного средства при заданной величине нажатия акселератора относительно велика.
Преимущественно, когда водитель нажимает акселератор, реактивную силу акселератора можно увеличить относительно базовой реактивной силы, если величина нажатия акселератора превышает заданную пороговую величину нажатия или если интенсивность нажатия акселератора превышает заданную пороговую величину интенсивности нажатия. Следовательно, можно предотвратить чрезмерное нажатие акселератора и сократить расход топлива.
Преимущественно, когда желательно значительно увеличить величину нажатия акселератора для ускорения транспортного средства в соответствии с намерениями водителя, если увеличить реактивную силу акселератора, этот акселератор нельзя будет нажать в достаточной степени, и транспортное средство нельзя будет плавно ускорить. Однако в некоторых вариантах, описанных выше, пороговая величина нажатия акселератора или пороговая величина интенсивности нажатия в таком случае могут быть увеличены. Например, когда нажимается акселератор, реактивную силу можно поддерживать на базовой величине, пока величина нажатия акселератора не превысит относительно большую пороговую величину. В результате транспортное средство можно ускорять в соответствии с намерениями водителя.
Хотя настоящее изобретение было описано со ссылками на ограниченное количество вариантов, специалистам в данной области техники должно быть очевидно, что могут быть созданы и другие варианты, не выходящие за пределы объема настоящего изобретения. Соответственно объем настоящего изобретения определяется только приложенной формулой.
Реферат
Изобретение относится к устройствам для средств включения неавтоматического управления двигателем и предназначено для создания силы, противодействующей нажатию на педаль акселератора. При управлении транспортным средством определяют величину нажатия акселератора, регулируют реактивную силу акселератора. Реактивную силу акселератора увеличивают, когда величина нажатия акселератора превышает вторую пороговую величину в диапазоне низких скоростей движения транспортного средства, и реактивную силу акселератора увеличивают, когда величина нажатия акселератора превышает первую пороговую величину в диапазоне высоких скоростей транспортного средства. Первую пороговую величину устанавливают более высокой, чем вторую пороговую величину. Устройство содержит датчик для определения величины нажатия акселератора, контроллер для регулирования реактивной силы акселератора. Достигаются повышение эргономичности, снижение удельного расхода топлива. 2 н. и 8 з.п. ф-лы, 11 ил.
Комментарии