Робот-пылесос и способ управления роботом-пылесосом - RU2317766C2
Код документа: RU2317766C2
Чертежи



Описание
ССЫЛКА НА СВЯЗАННЫЕ ЗАЯВКИ
Настоящая заявка основана на корейской заявке №2005-15468, поданной 24 февраля 2005 в Корейское бюро по охране интеллектуальной собственности и полностью включенной в настоящее описание путем ссылки. Настоящая заявка связана также с заявкой на патент США №10/804077, поданной 19 марта 2004 и включенной в настоящее описание путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к роботу-пылесосу и к способу управления таким роботом. Более конкретно настоящее изобретение относится к роботу-пылесосу и способу управления таким роботом, обеспечивающим лучший охват области уборки.
УРОВЕНЬ ТЕХНИКИ
В последнее время сформировался и растет рынок роботов для домашнего использования. На рынке появились и конкурируют различные типы роботов-пылесосов. Важно, чтобы робот-пылесос очищал всю область уборки, не оставляя никаких неубранных участков. Поэтому для уборки всей площади робот-пылесос должен отличать неубранные участки от убранных участков. Типичные способы уборки обычным роботом-пылесосом включают способ уборки по случайной траектории и способ уборки по шаблону.
На фиг.1 показан пример обычного способа уборки по случайной траектории. Позицией 11а обозначена убираемая площадь, а позицией 11b - случайная траектория уборки. Способ уборки по случайной траектории означает, что пылесос маневрирует по убираемой площади, не придерживаясь каких-либо правил. Другими словами, он движется аналогично катящемуся шару, который упруго отскакивает после соударения со стенками, образуя около места соударения траекторию в форме буквы V. При использовании способа уборки по случайной траектории часто не удается убрать всю площадь.
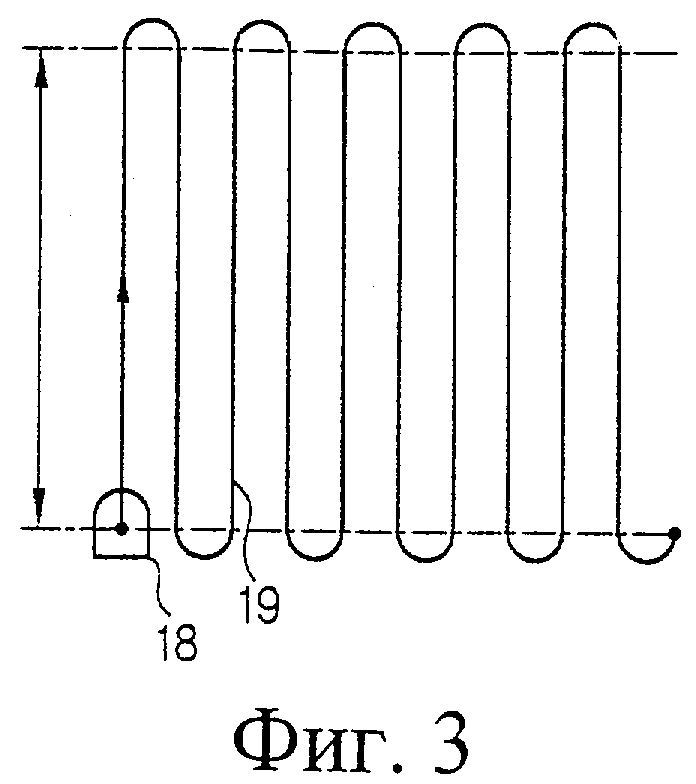
На фиг.2 показан пример схемы устройства для типичного способа уборки по шаблону, раскрытого в патенте Японии №5161577. На фиг.3 показан шаблон перемещения при уборке для устройства, изображенного на фиг.2.
Обратимся к фиг.2 и 3. Типичный робот-пылесос содержит средство 3 управления перемещением для перемещения основного корпуса робота; средство 5 определения пройденного расстояния; средство 4 определения направления, в котором ориентирован основной корпус; средство 8 принятия решения, в которое поступают сигналы из средства 5 определения пройденного расстояния и средства 4 определения направления и которое выдает сигнал в средство 3 управления перемещением; средство 2 уборки поверхности пола; источник 1 питания для подачи энергии в основной корпус робота в целом; средство 6 установки расстояния и средство 7 установки частоты поворотов. Робот-пылесос едет по прямой линии и совершает U-образные повороты с помощью средства 4 определения направления и средства 3 управления перемещением. Робот-пылесос решает, достигает ли частота поворотов и расстояние перемещения по прямой линии значения, заданного для проведения уборки. На фиг.3 позицией 18 обозначен корпус робота-пылесоса, а позицией 19 - траектория движения.
Однако робот-пылесос, раскрытый в патенте JP 5161577, движется просто по параллельным полосам и не может эффективно охватить всю площадь убираемой поверхности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение решает вышеуказанные проблемы. Первый аспект настоящего изобретения относится к созданию робота-пылесоса, который при уборке движется по спиральной траектории, равномерно охватывающей убираемую площадь. Второй аспект настоящего изобретения относится к способу уборки с помощью вышеуказанного робота-пылесоса.
Соответственно согласно настоящему изобретению предложен робот-пылесос, содержащий движущий блок для перемещения робота-пылесоса по поверхности, предназначенной для уборки; блок определения расстояния, пройденного при помощи движущего блока; блок обнаружения препятствий вокруг робота-пылесоса и центральный блок обработки данных, обеспечивающий перемещение робота-пылесоса на определенное расстояние от препятствия согласно шаблону перемещения при уборке, когда блок обнаружения препятствий обнаруживает препятствие, и при этом применяющий разное расстояние всякий раз, когда препятствие обнаружено, и выдающий сигнал перемещения в движущий блок.
Центральный блок обработки данных может содержать блок определения наличия препятствия на основе сигнала, полученного из блока обнаружения препятствия; блок перемещения по прямой, выдающий в движущий блок сигнал перемещения по прямой для перемещения робота-пылесоса по прямой линии на определенное расстояние от препятствия, при этом расстояние перемещения по прямой является переменным; блок подсчета расстояния, вычисляющий расстояние перемещения движущего блока по прямой на основе информации, переданной через блок определения пройденного расстояния; и блок перемещения с поворотами, выдающий в движущий блок сигнал на перемещение по спиральной траектории для выполнения уборки, когда блок подсчета расстояния определяет, что расстояние, пройденное движущим блоком по прямой, достигло указанного определенного расстояния. Движение по спиральной траектории может включать движение по прямоугольно-спиральной траектории.
Блок обнаружения препятствий может продолжать непрерывно обнаруживать препятствия при перемещении движущего блока по прямой линии и выдавать в движущий блок новый сигнал на перемещение по прямой линии, если в процессе перемещения блок определения решает, что препятствие присутствует.
Согласно настоящему изобретению способ управления роботом-пылесосом включает обнаружение препятствия; перемещение робота по прямой линии от препятствия на определенное расстояние, если препятствие обнаружено; и перемещение робота-пылесоса по спирали для выполнения уборки, причем обнаружение препятствия, перемещение по прямой и перемещение по спирали повторяют, а расстояние перемещения по прямой изменяют при обнаружении препятствия во время перемещения робота-пылесоса
При перемещении робота-пылесоса по прямой линии на определенное расстояние от препятствия обнаружение препятствий не прерывают и, когда в процессе движения обнаружено препятствие, робот-пылесос перемещают по прямой линии на основе вновь установленной величины перемещения по прямой линии.
Согласно варианту осуществления настоящего изобретения робот-пылесос при уборке обеспечивает перемещение по прямоугольно-спиральному шаблону, причем когда пылесос сталкивается с препятствием, стартовая точка уборки изменяется, что позволяет улучшить покрытие площади уборки и предотвратить наличие неубранных участков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанные и другие аспекты, особенности и преимущества настоящего изобретения станут понятнее из последующего подробного описания со ссылками на сопровождающие чертежи, где:
на фиг.1 схематично представлен известный способ уборки по случайной траектории;
на фиг.2 показана блок-схема устройства для реализации обычного способа уборки по шаблону;
на фиг.3 схематично показан шаблон перемещения робота при уборке при использовании устройства, показанного на фиг.2;
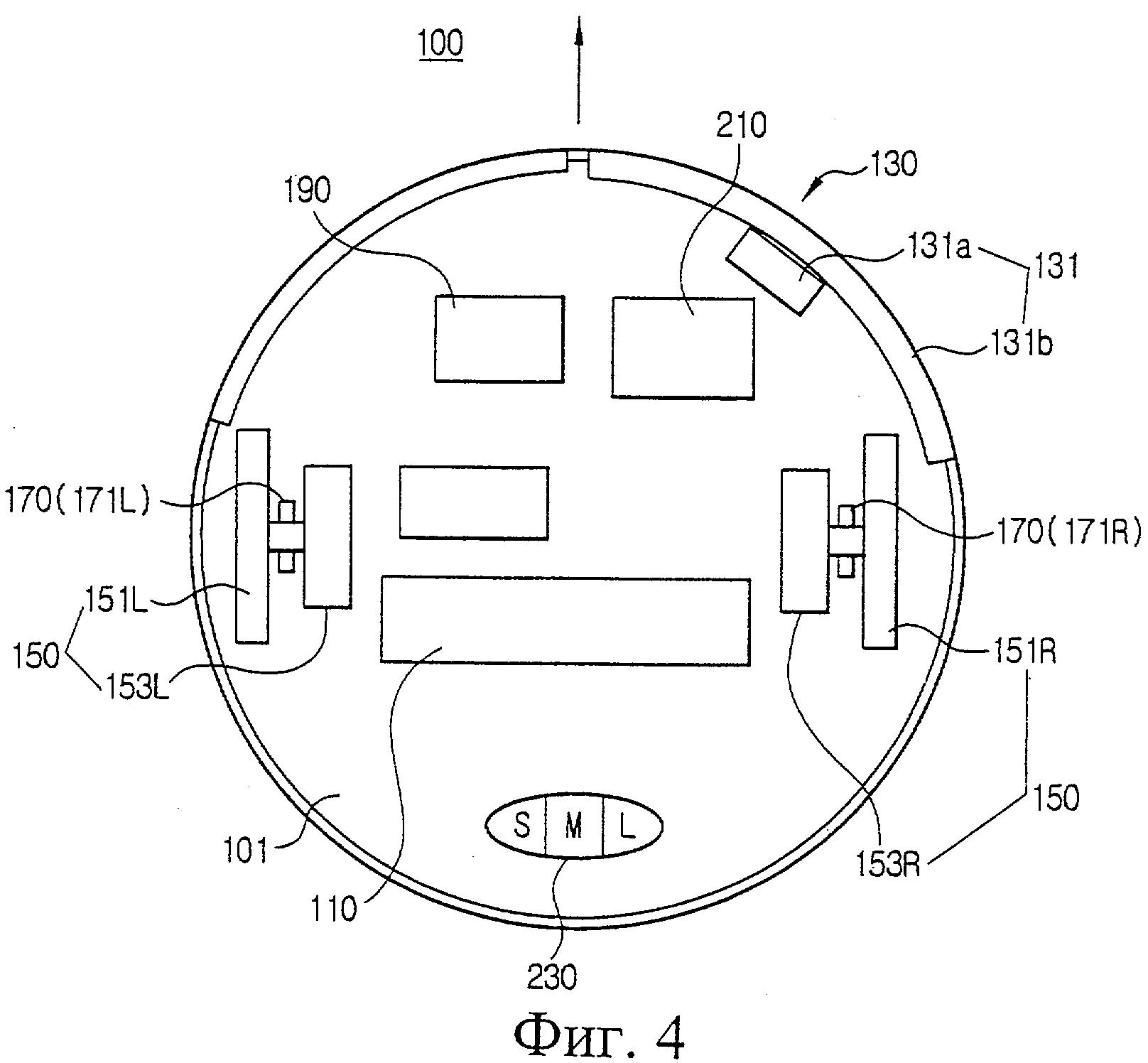
на фиг.4 схематично представлен робот-пылесос согласно одному из вариантов осуществления настоящего изобретения;
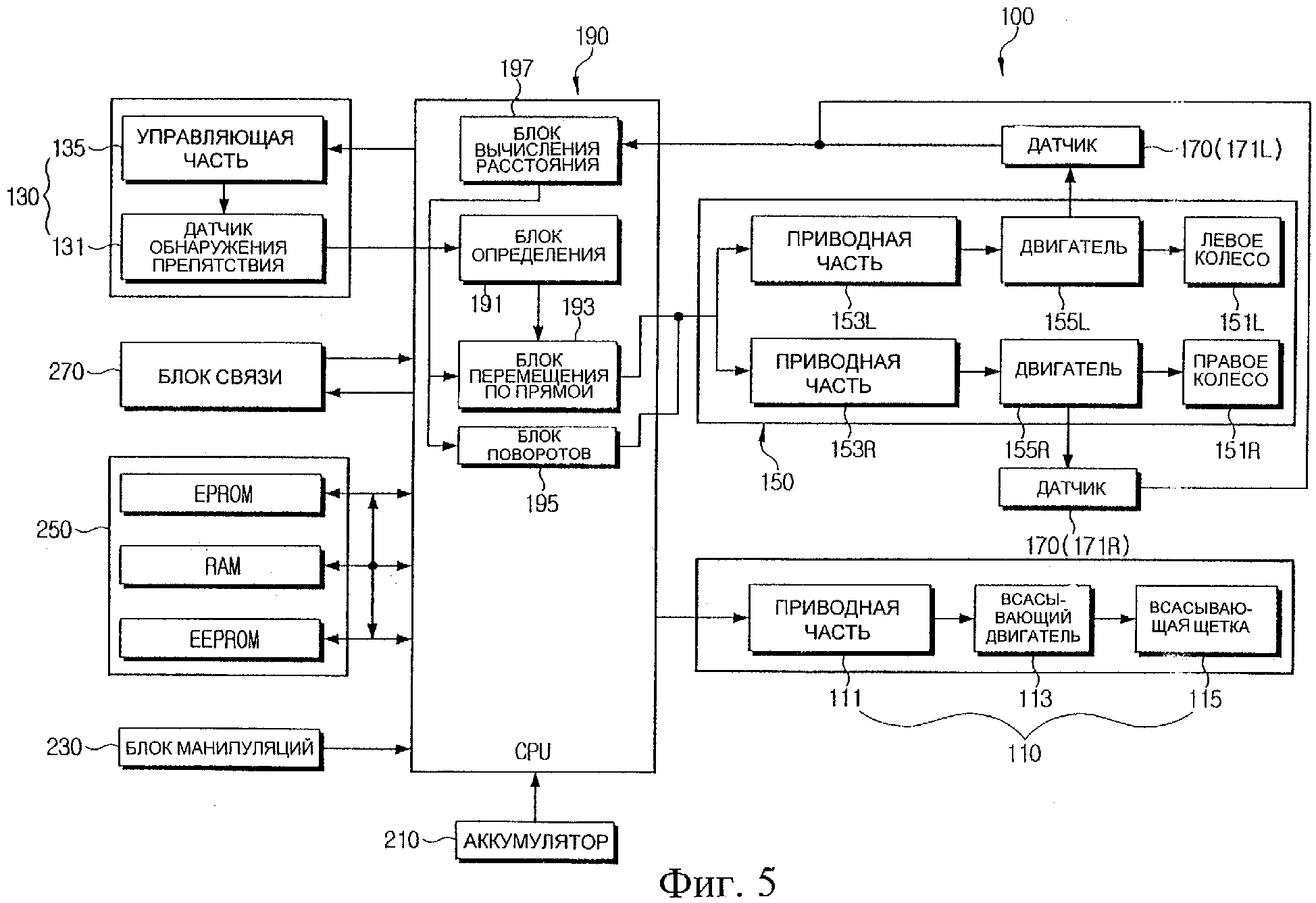
на фиг.5 показана блок-схема робота-пылесоса, выполненного согласно варианту осуществления настоящего изобретения;
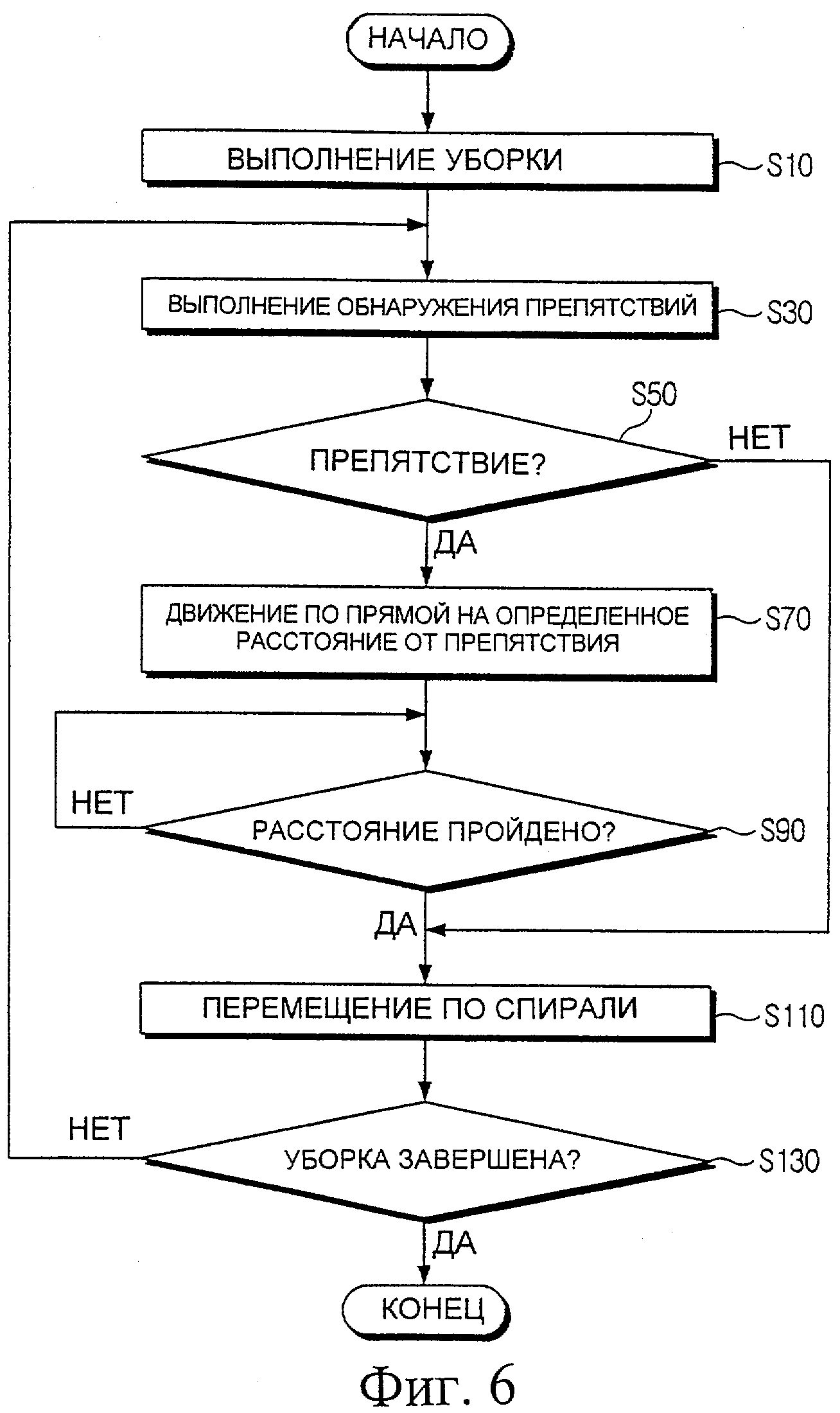
на фиг.6 показана последовательность операций уборки для робота-пылесоса согласно варианту осуществления настоящего изобретения;
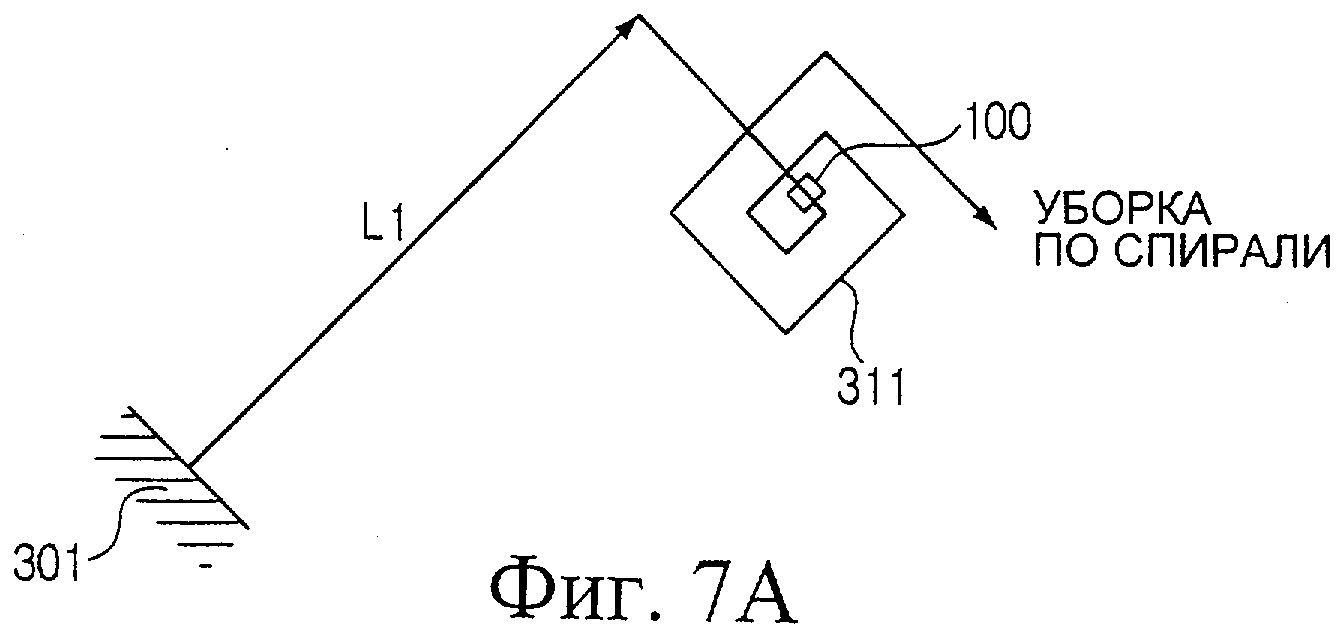
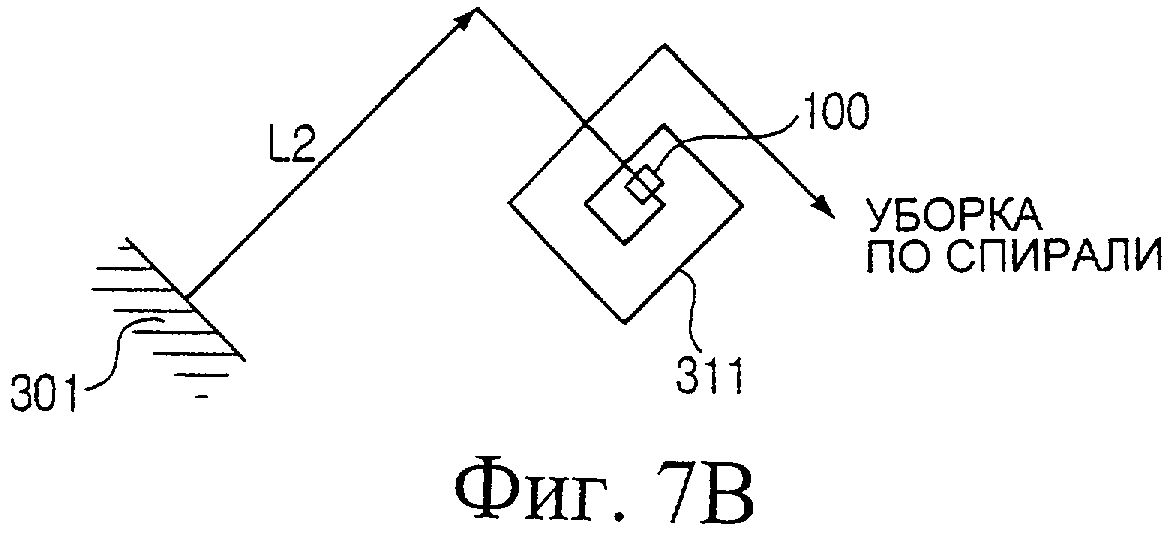
на фиг.7А, 7В и 7С показаны примеры спиральных траекторий движения робота-пылесоса согласно варианту осуществления настоящего изобретения при различных расстояниях L1, L2 и L3 от препятствия соответственно;
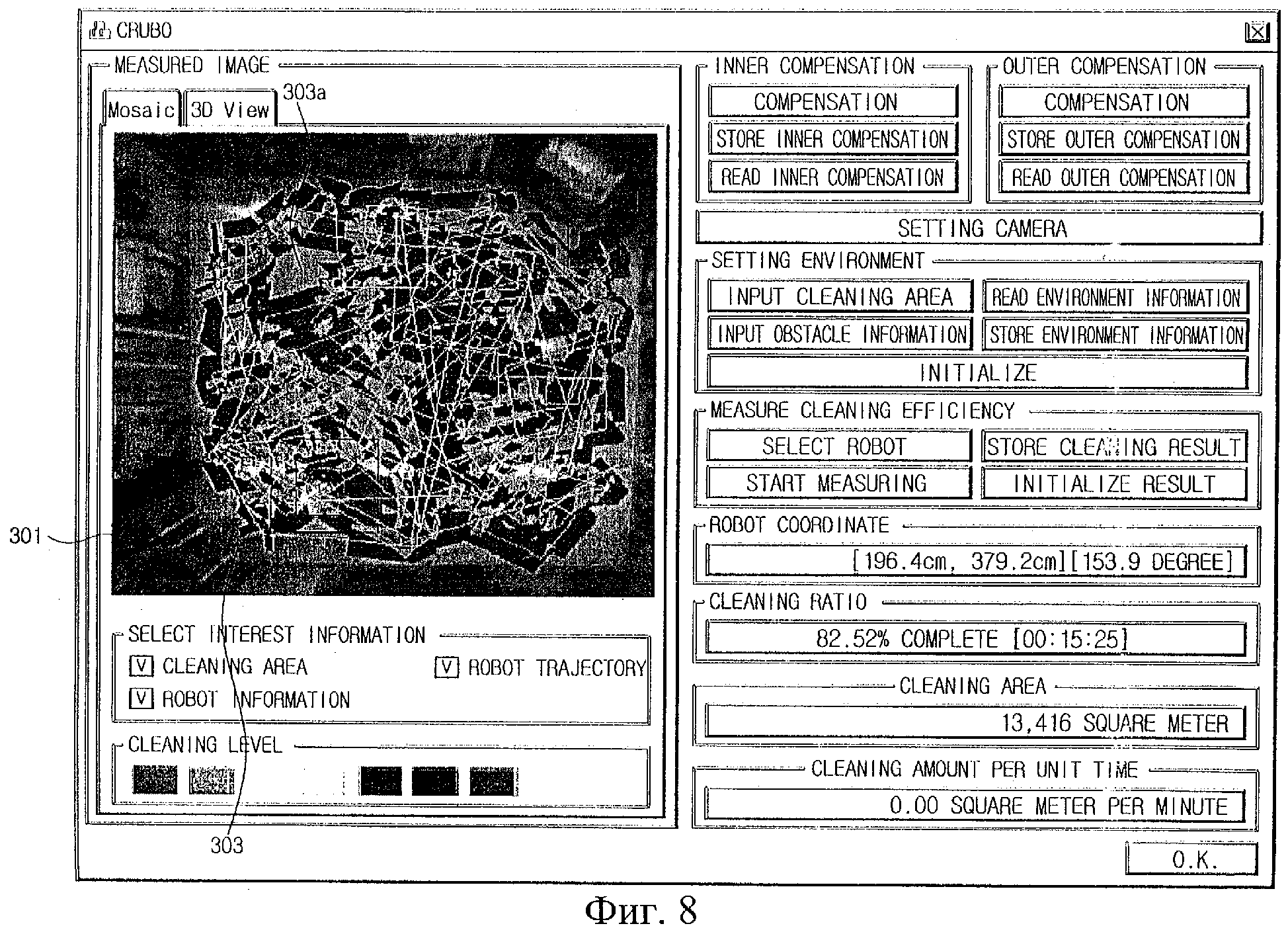
на фиг.8 представлен пример образования неубранных областей при уборке с фиксированным расстоянием; и
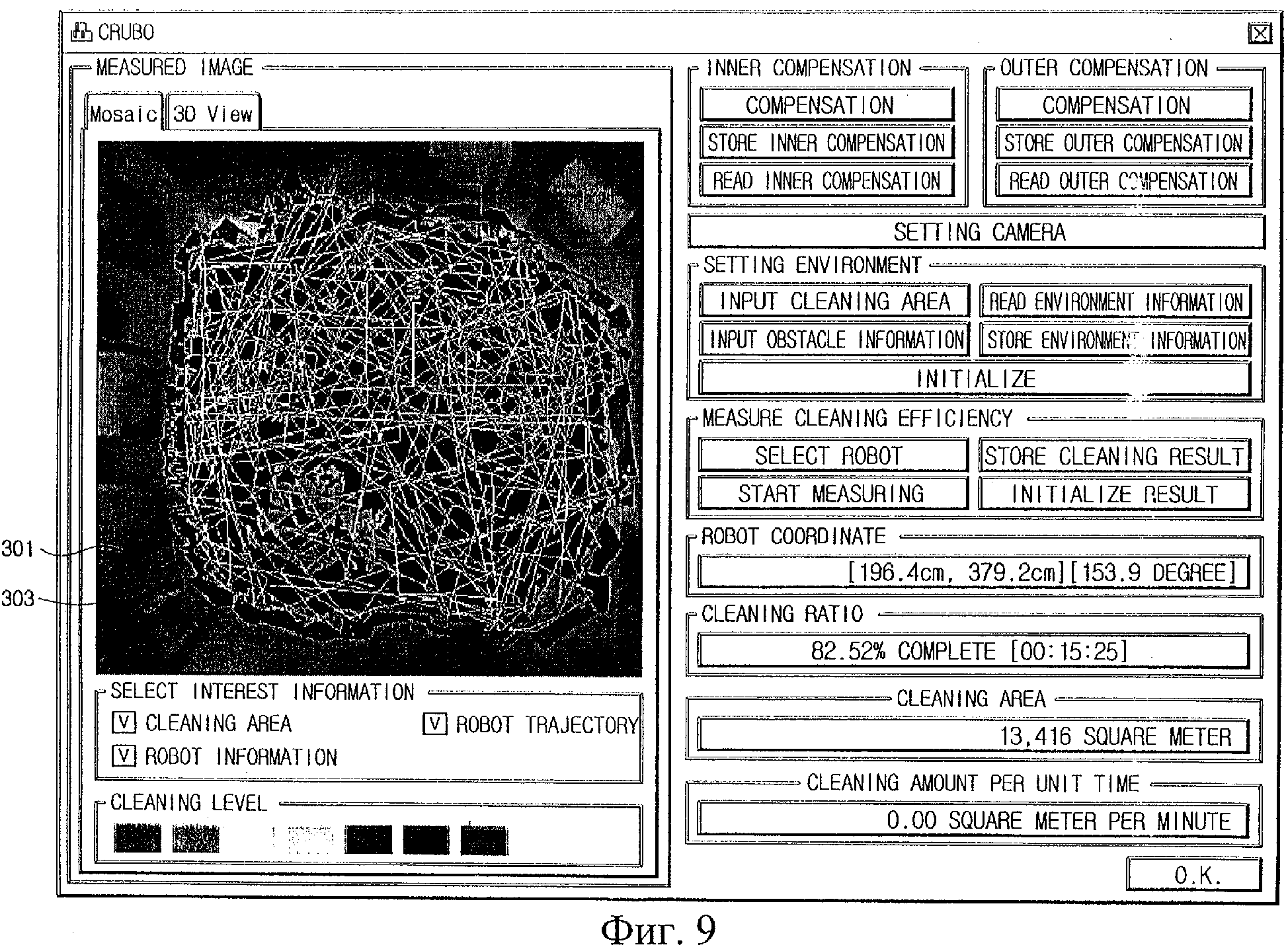
на фиг.9 показан пример, в котором площадь убирается равномерно при использовании переменных расстояний, как показано на фиг.7А-7С, согласно настоящему изобретению. ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В последующем описании одинаковые элементы на разных чертежах обозначены одинаковыми позициями. Признаки, конкретизированные в описании, например подробные описания конструкций и элементов, даны только для лучшего понимания изобретения. Таким образом: настоящее изобретение может быть выполнено без таких конкретных признаков. Кроме того, известные функции или конструкции не описываются подробно, чтобы не загромождать описание ненужными подробностями.
Как показано на фиг.4, робот-пылесос 100 содержит корпус 101 пылесоса, блок 110 уборки, блок 130 обнаружения препятствий, движущий блок 150, блок 170 определения расстояния, центральный блок 190 обработки данных, аккумулятор 210 и блок 230 манипуляций.
Корпус 101 пылесоса может быть круглым и содержит блок 110 уборки, предназначенный для сбора пыли или грязи с убираемой поверхности. Блок 110 уборки может состоять, например, из всасывающей щетки 115 и всасывающей трубы (не показана), предназначенных для всасывания пыли или грязи с убираемой поверхности, всасывающего двигателя 113 для создания всасывающей силы и пылеуловительной камеры (не показана) для сбора втянутой пыли и грязи.
Блок 130 обнаружения препятствий установлен на передней стороне корпуса 101 пылесоса. Блок 130 обнаружения препятствий содержит датчик 131 обнаружения препятствий, предназначенный для обнаружения препятствий на стенах или убираемых поверхностях. Датчик 131 обнаружения препятствий может быть, например, оптическим датчиком 131а, в котором оптический элемент, испускающий инфракрасные лучи, и приемный оптический элемент, принимающий отраженный свет, расположены парой, ориентированной в вертикальном направлении. Кроме того, датчик 131 обнаружения препятствий может также включать датчик 131b столкновения, расположенный на периферийной части корпуса 101 пылесоса и обнаруживающий препятствия. Датчик 131b столкновения обнаруживает препятствие, сталкиваясь с ним. Датчик 131 обнаружения препятствий может быть ультразвуковым датчиком (не показан), который способен испускать ультразвуковые волны и принимать отраженные ультразвуковые волны.
Движущий блок 150 для управления ведущими колесами установлен на корпусе 101 пылесоса. Движущий блок 150 содержит двигатель 153L левого колеса и двигатель 153R правого колеса, управляющие вращением левого колеса 151L и правого колеса 151R соответственно.
Блок 170 обнаружения расстояния содержит датчик 171L вращения левого колеса и датчик 171R вращения правого колеса, которые обнаруживают вращение двигателя 153L правого колеса и двигателя 153R левого колеса.
Центральный блок 190 обработки данных контролирует работу робота-пылесоса 100 в целом, а аккумулятор 210 заряжается от внешнего устройства и по мере необходимости снабжает робот-пылесос энергией. Блок 230 манипуляций используется для ввода команд управления роботом-пылесосом в центральный блок 190 обработки данных в соответствии с манипуляциями пользователя.
Как показано на фиг.5, робот-пылесос 100 содержит блок 110 уборки, блок 130 обнаружения препятствий, движущий блок 150, блок 170 определения расстояния, центральный блок 190 обработки данных, аккумулятор 210, блок 230 манипуляций, память 250 и блок 270 связи.
Блок 110 уборки содержит приводную часть 111 всасывающего двигателя, получающую сигнал уборки из центрального блока 190 обработки данных для управления работой всасывающего двигателя 113, и всасывающую щетку 115, приводимую в действие всасывающим двигателем 113.
Блок 130 обнаружения препятствий обнаруживает препятствие перед роботом-пылесосом 100 и сообщает о нем в центральный блок 190 обработки данных и содержит управляющую часть 135 и датчик 131 обнаружения препятствий, работой которого управляет управляющая часть 135. Датчик 131 обнаружения препятствий может быть, например, оптическим датчиком, инфракрасным датчиком или датчиком столкновения.
Движущий блок 150 содержит приводную часть 153L левого колеса и приводную часть 153R правого колеса, которые получают сигналы перемещения из центрального блока 190 обработки данных. Сигналы с выхода блока 190, поступающие в двигатель 155L левого колеса и двигатель 155R правого колеса, вращают левое колесо 151L и правое колесо 151R соответственно.
Блок 170 определения расстояния передает значение расстояния, пройденного роботом-пылесосом 100, в центральный блок 190 обработки данных к содержит датчик 171L вращения левого колеса (фиг.4) и датчик 171R вращения правого колеса (фиг.4).
Центральный блок 190 обработки данных содержит блок 191 определения, который получает сигнал из блока 130 обнаружения препятствий, чтобы определить, имеется ли препятствие. Если по информации блока 191 определения обнаружено препятствие, блок 193 перемещения по прямой линии передает сигнал в движущий блок 150, чтобы отвести робот-пылесос 100 от препятствия на заданное расстояние, а блок 195 перемещения с поворотами выдает сигнал перемещения с поворотами в движущий блок 150 для перемещения робота-пылесоса 100 согласно шаблону перемещения при уборке, когда робот-пылесос 100 пройдет по прямой линии это заданное расстояние. Шаблон перемещения при уборке может быть спиралью, а предпочтительно прямоугольной спиралью. Прямоугольно-спиральный шаблон уборки позволяет более эффективно охватить убираемую площадь. Центральный блок 190 обработки данных дополнительно содержит блок 197 подсчета расстояния, который вычисляет расстояние на основе количества оборотов двигателя 155L левого колеса и двигателя 155R правого колеса, переданных посредством датчика 171L вращения левого колеса и датчика 171R вращения правого колеса соответственно.
Блок 230 манипуляций управляет всеми операциями робота-пылесоса 100 и включает различные ручные переключатели. Память 250 управляет операциями робота-пылесоса 100 в целом и включает EPROM (стираемую программируемую постоянную память), EEPROM (электрически стираемую программируемую постоянную память) и RAM (оперативную память с произвольным доступом). Блок 270 связи высылает внутренние данные робота-пылесоса 100 или передает в центральный блок 190 обработки данных полученные внешние данные. Аккумулятор 210 хранит энергию, полученную из внешнего зарядного устройства (не показано), и выдает энергию, необходимую для работы робота-пылесоса 100.
Обратимся к фиг.5 и 6. Сначала на этапе S10 робот-пылесос 100 производит уборку. Когда из блока 230 манипуляций поступает сигнал начала уборки, центральный блок 190 обработки данных выдает управляющий сигнал в блок 110 уборки и одновременно выдает управляющий сигнал в движущий блок 150. Когда из центрального блока 190 обработки данных в приводную часть 111 всасывающего двигателя выдан управляющий сигнал, приводная часть 111 всасывающего двигателя приводит в действие всасывающий двигатель 113 для работы всасывающей щетки 115. Пыль или мусор удаляются с убираемой поверхности с помощью всасывающей щетки 115 и перемещаются в пылесборную камеру. Одновременно, когда управляющий сигнал из центрального блока 190 обработки данных выдается в приводную часть 153L левого двигателя или приводную часть 153R правого двигателя, запускается двигатель 155L левого колеса или двигатель 155R правого колеса, вращая левое колесо 151L или правое 151R колесо, согласно шаблону перемещения при уборке, и производится уборка согласно этому шаблону. Траектория уборки может быть прямоугольной спиралью, чтобы убираемая площадь могла быть охвачена равномерно.
Как описано выше, при уборке на этапе S30 центральный блок 190 обработки данных выдает сигнал на обнаружение препятствия в часть 135 управления обнаружением препятствий и управляет датчиком 131 обнаружения препятствий с целью обнаружения препятствия. Часть 135 управления обнаружением препятствий может, например, управлять датчиком 131 обнаружения препятствий с целью обнаружения им препятствия. Датчик 131 обнаружения препятствия может быть, например, оптическим датчиком, ультразвуковым датчиком или датчиком столкновения. Соответственно датчик 131 обнаружения препятствий может приводить в действие светоизлучающий элемент, генерирующий свет, или генераторную часть ультразвукового датчика, генерирующую ультразвуковые волны.
Когда сигнал обнаружения поступает в центральный блок 190 обработки данных из датчика 131 обнаружения препятствий, на этапе S50 блок 191 определения центрального блока 190 обработки данных определяет, обнаружено ли препятствие. Если да, то на этапе S70 центральный блок 190 обработки данных выдает сигнал перемещения по прямой линии в приводную часть 153L левого колеса и приводную часть 153R правого колеса движущего блока 150 и перемещает робот-пылесос 100 по прямой линии от препятствия на определенное расстояние (см. фиг.7).
Количество оборотов двигателя 155L левого колеса или двигателя 153R правого колеса передается в блок 197 подсчета расстояния посредством датчика 171L вращения левого колеса или датчика 171R вращения правого колеса, и блок 197 подсчета расстояния на этапе S90 вычисляет расстояние по прямой линии, определяя, прошел ли робот-пылесос 100 определенное расстояние.
Когда будет определено, что робот-пылесос 100 переместился на определенное расстояние L, блок 197 подсчета расстояния передает сигнал в блок 195 перемещения с поворотами, а блок 195 выдает сигнал перемещения с поворотами в движущий блок 150 для перемещения робота-пылесоса 100 на этапе S110 по спирали, а предпочтительно согласно прямоугольно-спиральному шаблону уборки.
Если робот-пылесос 100 еще не прошел определенного расстояния L, то блок 197 подсчета расстояния через блок 193 перемещения по прямой линии выдает сигнал перемещения по прямой линии для продолжения перемещения движущего блока 150 по прямой линии. Если при перемещении по прямой линии обнаружено новое препятствие, то блок 193 перемещения по прямой линии выдает новый сигнал перемещения по прямой линий, и робот-пылесос 100 перемещается в соответствии с новым установленным расстоянием перемещения по прямой линии.
Если после этапа S110 определено, что уборка закончена, ее прекращают, а в противном случае вышеупомянутые действия повторяют. При повторении вышеупомянутых действий на этапе S70 изменяют расстояние прямого перемещения робота-пылесоса 100 от препятствия. Это делается для обеспечения равномерного охвата убираемой площади и для повышения эффективности уборки.
На фиг.7А, 7В и 7С показаны примеры спиральных траекторий движения робота-пылесоса согласно одному из вариантов осуществления настоящего изобретения при различных расстояниях L1, L2 и L3 от препятствия 301 соответственно.
На фиг.7А-7С позицией 100 обозначен робот-пылесос, позицией 311 - прямоугольно-спиральная траекторию перемещения, а позицией 301 - препятствие, например, на стене или убираемой поверхности.
На фиг.8 позицией 301 обозначена, например, стена, а позицией 303 обозначена убираемая поверхность. Темным обозначена убранная часть на убираемой поверхности 303. Если расстояние от препятствия 301 сохраняется постоянным, неубранная площадь 303а имеет вид, показанный на фиг.8. Наиболее темная часть на показанной убранной площади соответствует местам, где робот-пылесос 100 проходит чаще всего. Как можно видеть, определенные ограниченные участки подвергаются многократной уборке, в то время как площадь 303а остается неубранной.
Поэтому в настоящем изобретении используется изменяемое расстояние L до препятствия 303а, как показано на фиг.7А-7С, что позволяет избежать появления неубранных площадей.
На фиг.9 показан пример равномерно-охваченной площади при ее уборке с использованием переменных расстояний L1, L2 и L3, как показано на фиг.7А-7С. На фиг.9 уборка происходит равномерно по всей убираемой поверхности 303 и площадь темных частей больше, чем на фиг.8.
Дополнительные преимущества, цели и особенности вариантов осуществления настоящего изобретения сформулированы в описании и станут очевидными специалистам в данной области техники после прочтения описания и при практической реализации изобретения. Цели и преимущества вариантов осуществления настоящего изобретения могут быть поняты и достигнуты в соответствии с формулой изобретения.
Реферат
Изобретение относится к роботу-пылесосу. Робот-пылесос содержит движущий блок для перемещения по поверхности, предназначенной для уборки, блок определения расстояния, пройденного при помощи движущего блока, блок обнаружения препятствий вблизи робота-пылесоса. Центральный блок обработки данных обеспечивает перемещение робота-пылесоса по прямой линии на расстояние от препятствия согласно шаблону перемещения, когда блок обнаружения препятствий обнаруживает препятствие. При этом блок обнаружения препятствий использует разные расстояния, когда обнаружено препятствие, и выдает сигнал перемещения в движущий блок. Технический результат заключается в обеспечении лучшего охвата области уборки. 2 н. и 5 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Мобильный робот и способ корректировки его курса
Комментарии