Мобильный робот и способ корректировки его курса - RU2210492C2
Код документа: RU2210492C2
Чертежи







Описание
Изобретение относится к мобильному роботу, который автоматически перемещается по помещению, и, в частности, к мобильному роботу, содержащему обзорную телекамеру для определения своего местоположения и для предотвращения столкновения с препятствиями в помещении. Настоящее изобретение также относится к способу корректировки курса мобильного робота.
Обычно в корпусе мобильного робота установлен источник питания и чувствительный элемент, что позволяет мобильному роботу перемещаться по заданной территории без внешнего источника питания и без внешнего управления. В быту используют два основных типа мобильных роботов: роботы для уборки помещений в доме и роботы для охраны дома от возможного вторжения.
Обычный мобильный робот использует способ хаотичного перемещения, при котором он перемещается хаотично, не определяя своего местоположения, и неоднократно изменяет направление перемещения при встрече с препятствиями, такими как стена, стол и т.д.
Такой мобильный робот содержит перемещающее устройство для перемещения по помещению, устройство обнаружения препятствия для обнаружения наличия препятствия, такого как стена, стол и т.д., управляющую часть для корректировки ориентации мобильного робота путем управления устройством перемещения и устройством обнаружения препятствия и источник питания для аккумуляции электроэнергии и питания соответствующих устройств.
В качестве перемещающего устройства может быть применено колесное устройство, выполненное с использованием серводвигателя или шагового двигателя для вращения колес и перемещения мобильного робота, гусеничное устройство, выполненное с использованием трака с соединенными концами, или шарнирное устройство, выполненное с использованием ног. Из всех этих устройств наиболее широкое использование нашло колесное устройство.
Устройство обнаружения препятствия обнаруживает препятствия, такие как стена, стол и т.д., ультразвуковым или лазерным чувствительным элементом и посылает соответствующий сигнал в управляющую часть. Для более точного обнаружения препятствия на пути перемещения робота чувствительный элемент устройства обнаружения препятствия предпочтительно установлен на передней стороне мобильного робота параллельно поверхности перемещения.
Управляющая часть содержит микропроцессор и память, установленные там для управления обычными действиями мобильного робота, такими как подача команды пуска на перемещающее устройство, управление перемещением перемещающего устройства для обхода препятствия в соответствии с сигналами, полученными от устройства обнаружения препятствия, и с внутренней, предварительно установленной программой, и зарядка электроэнергией источника питания, когда обнаруживается, что мощность упала ниже заданного уровня.
Источник питания обеспечивает энергию для работы различных частей мобильного робота, таких как двигатель, вращающий колеса перемещающего устройства, чувствительный элемент, обнаруживающий наличие препятствия, управляющая часть и т.д. Обычно источником питания является аккумуляторная батарея, которая делает возможной работу мобильного робота в течение заданного периода времени без подключения к внешнему источнику питания.
Работа этого мобильного робота подробно описана ниже.
Сначала, когда мобильный робот получает команду пуска, управляющая часть подает команду перемещения перемещающему устройству и соответствующий сигнал обнаружения устройству обнаружения препятствия. В ответ на сигнал от управляющей части запускается двигатель, и перемещающее устройство перемещается в некотором направлении. В это время устройство обнаружения препятствия посылает сигнал обнаружения в управляющую часть путем приведения в действие чувствительного элемента. Во время работы мобильного робота, когда чувствительный элемент обнаруживает наличие препятствия в заданных пределах перемещения робота, управляющая часть подает команду перемещающему устройству на изменение траектории или направления перемещения мобильного робота. Затем перемещающее устройство продолжает перемещение мобильного робота. Всякий раз, когда мобильный робот встречает препятствие, направление перемещения мобильного робота изменяется описанным способом. Таким образом, мобильный робот перемещается в соответствии со своим первоначальным положением и расположением препятствия, выписывая беспорядочную траекторию, как показано на фиг.1.
При перемещении на ограниченной территории такое беспорядочное перемещение мобильного робота неэффективно, так как он перемещается хаотично. Другим недостатком беспорядочного перемещения мобильного робота является то, что он несколько раз проходит по одному и тому же месту.
Ультразвуковой чувствительный элемент обычного устройства обнаружения препятствия содержит ультразвуковую излучающую часть для излучения ультразвуковых волн и ультразвуковую приемную часть для приема отраженных от препятствия ультразвуковых волн. Измеряя временной интервал между излучением ультразвука и приемом отраженного ультразвука, управляющая часть вычисляет расстояние от мобильного робота до препятствия и соответственно управляет двигателем мобильного робота так, чтобы обойти это препятствие.
Хотя при использовании обычного устройства и способа обнаружения препятствия можно измерить расстояние от мобильного робота до препятствия, характер препятствия так определить невозможно, поскольку невозможно получить точную информацию о форме препятствия и т.п. Соответственно мобильный робот не может определить, переезжать через препятствие или обойти его.
Для более эффективного выполнения уборки или охраны помещения мобильному роботу необходимо сохранять заданную ориентацию. Для этого необходимо периодически проверять, перемещается ли мобильный робот в правильном направлении и корректировать его ориентацию, если установлено, что он отклонился от курса.
Обычный мобильный робот в качестве ориентира использует направляющую ленту или стену помещения для обеспечения правильного курса перемещения.
При использовании направляющей ленты, прикрепленной к полу, мобильный робот проверяет ее наличие, используя фоточувствительный или магнитный чувствительный элемент. Мобильный робот перемещается вдоль направляющей ленты. Относительное положение направляющей ленты относительно чувствительного элемента определяет, правильный курс держит мобильный робот или нет.
При использовании в качестве ориентира стены помещения правильность курса перемещения мобильного робота определяют по расстоянию от мобильного робота до стены, которую обнаруживают чувствительным элементом, таким как ультразвуковой чувствительный элемент и т.п. В зависимости от расстояния между мобильным роботом и стеной мобильный робот корректирует свою ориентацию.
В то время как эти способы корректировки курса мобильного робота, то есть использование направляющей ленты или стены в качестве ориентира, могут быть полезными при управлении перемещением мобильного робота, они едва ли применимы к мобильному роботу, который определяет свое местоположение с использованием обзорной телекамеры. Так, если мобильный робот, определяющий свое местоположение с использованием обзорной телекамеры, отдельно оснастить направляющей лентой или ультразвуковым чувствительным элементом только для того, чтобы определить необходимость корректировки ориентации мобильного робота, это приведет к усложнению процесса изготовления робота и увеличению производственных затрат.
Целью настоящего изобретения является преодоление упомянутых недостатков известных на данный момент устройств. Соответственно задача настоящего изобретения - создать мобильный робот, способный эффективно перемещаться по заданному курсу и при этом определять свое местоположение и не проходить несколько раз по одному и тому же месту.
Еще одной целью настоящего изобретения является создание мобильного робота, который на основе информации о форме препятствия, находящегося по курсу перемещения, может определить, переехать ему через препятствие или обойти его. Информацию о форме препятствия обеспечивает устройство обнаружения препятствия с линейным лазером и обзорной телекамерой.
Еще одной целью настоящего изобретения является создание такого способа корректировки ориентации мобильного робота, определяющего свое местоположение с помощью обзорной телекамеры, при котором он решает, сохранять ему траекторию перемещения или изменить ее.
Указанные цели достигаются путем создания мобильного робота в соответствии с предлагаемым изобретением. Предлагаемый робот содержит перемещающее устройство для перемещения по помещению, устройство обнаружения препятствия для обнаружения наличия препятствия, устройство определения местоположения для определения текущего местоположения мобильного робота, управляющую часть для управления устройством перемещения, устройством обнаружения препятствия и устройством определения местоположения и источник питания для аккумуляции электроэнергии и питания каждого из устройств и управляющей части. Устройство определения местоположения, соединенное с управляющей частью и предназначенное для определения текущего местоположения мобильного робота, содержит первую обзорную телекамеру для создания изображения потолка помещения и распознавания базового знака на потолке. Кроме того, устройство определения местоположения содержит первую видеоплату, обрабатывающую изображение, полученное с первой обзорной телекамеры, и передающую данные в управляющую часть. При этом базовый знак может быть выполнен в виде опознавательного знака, имеющего базовую пластину и точки, сформированные на базовой пластине на заданном расстоянии друг от друга.
Устройство обнаружения препятствия содержит линейный лазер для излучения линейного светового пучка по направлению к препятствию, вторую обзорную телекамеру для распознавания линейного светового пучка, отраженного от препятствия, и вторую видеоплату для обработки видеоданных, полученных второй телекамерой.
Кроме того, указанные задачи также достигаются путем создания в соответствии с предлагаемым изобретением мобильного робота, содержащего перемещающее устройство для перемещения мобильного робота по помещению, устройство обнаружения препятствия для обнаружения наличия препятствия, устройство определения местоположения для определения текущего местоположения мобильного робота, управляющую часть для управления устройством перемещения, устройством обнаружения препятствия и устройством определения местоположения и источник питания для аккумуляции электроэнергии и питания перемещающего устройства, устройства определения местоположения, устройства обнаружения препятствия и управляющей части. Устройство обнаружения препятствия содержит линейный лазер для излучения линейного светового пучка по направлению к препятствию, вторую телекамеру для распознавания линейного светового пучка, отраженного от препятствия, и вторую видеоплату для обработки видеоданных, полученных второй телекамерой.
Вторая телекамера содержит фильтр для распознавания только линейного светового пучка линейного лазера.
Кроме того, указанные задачи достигаются благодаря созданию способа корректировки курса или маршрута перемещения мобильного робота. Мобильный робот содержит перемещающее устройство для перемещения мобильного робота по помещению, устройство обнаружения препятствия для обнаружения наличия препятствия, устройство определения местоположения для определения текущего местоположения мобильного робота, управляющую часть для управления устройством перемещения, устройством обнаружения препятствия и устройством определения местоположения и источник питания для аккумуляции электроэнергии и питания каждого из устройств и управляющей части. Способ включает съемку базового знака первой обзорной телекамерой устройства определения местоположения, формирование видеоданных базового знака первой видеоплатой, определение соответствия координат базового знака, полученных в результате обработки данных управляющей частью, координатам заданного маршрута перемещения и управление перемещающим устройством мобильного робота так, чтобы он перемещался в некотором направлении на соответствующее расстояние для того, чтобы скомпенсировать любое отклонение от заданного маршрута перемещения в случае, если координаты базового знака не соответствуют координатам заданного маршрута перемещения.
Кроме того, на этапе съемки базового знака и формирования видеоданных базового знака первой видеокамерой указанный способ может включать установку порога изображения, а на этапе определения соответствия координат способ может включать выполнение региональной корреляции в дополнение к вычислению координат базового знака.
Мобильный робот, относящийся еще к одному предпочтительному примеру реализации настоящего изобретения, содержит пылесос, имеющий всасывающее отверстие для всасывания мусора, пылесборник для сбора мусора и двигатель для создания всасывающей тяги.
Краткое описание чертежей
Перечисленные и другие цели и достоинства настоящего изобретения с очевидностью следуют из нижеследующего подробного описания при рассмотрении его вместе с
прилагаемыми чертежами, на которых:
фиг.1 изображает траекторию перемещения обычного мобильного робота;
фиг.2 схематично изображает вид в перспективе конструкции мобильного робота,
соответствующего предпочтительному варианту выполнения настоящего изобретения;
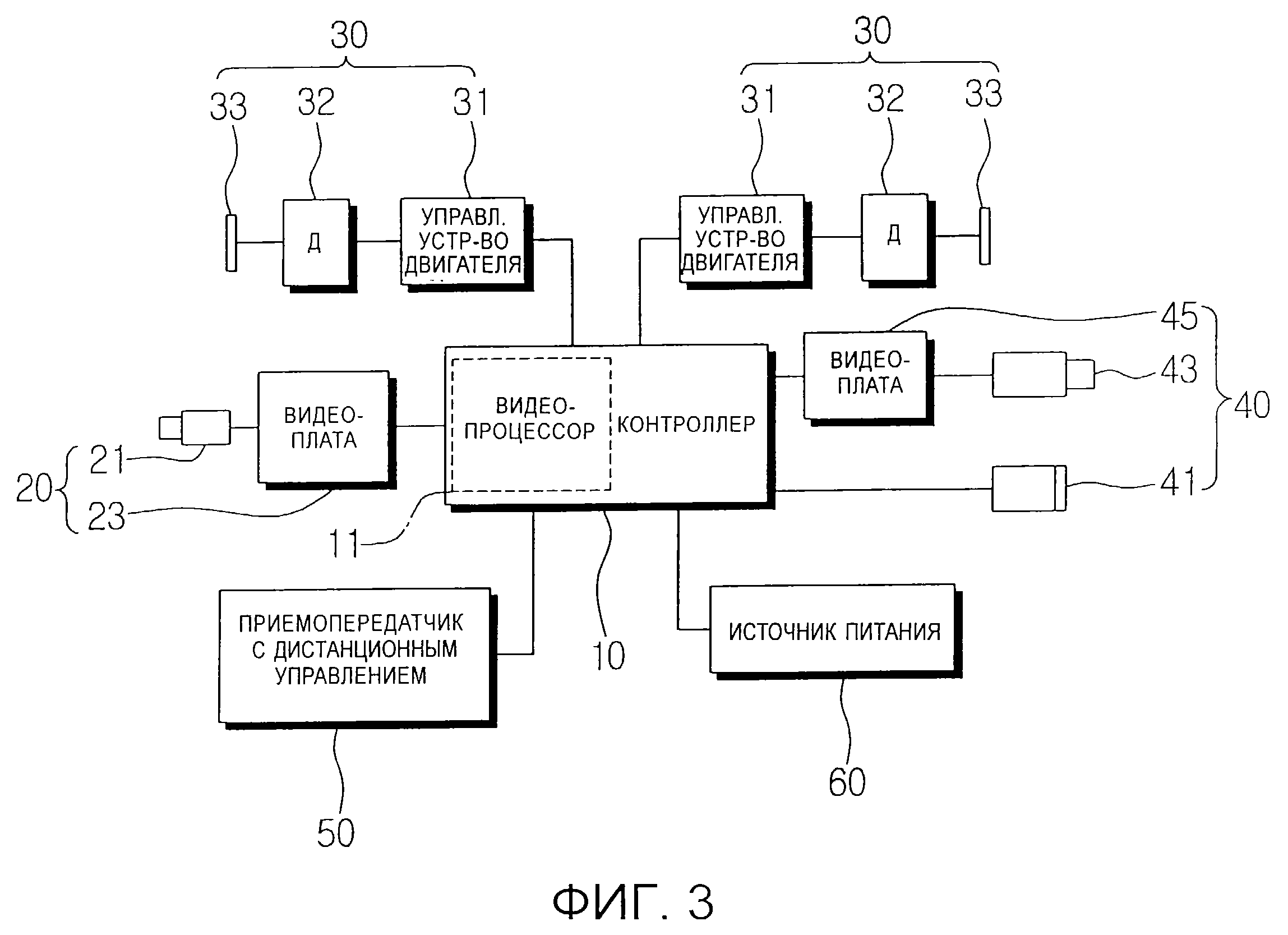
фиг. 3 изображает блок-схему, иллюстрирующую назначение соответствующих частей предлагаемого мобильного робота;
фиг.4 изображает блок-схему алгоритма, поясняющую способ определения местоположения предлагаемого мобильного робота;
фиг. 5 изображает в качестве примера один базовый знак для
предлагаемого мобильного робота;
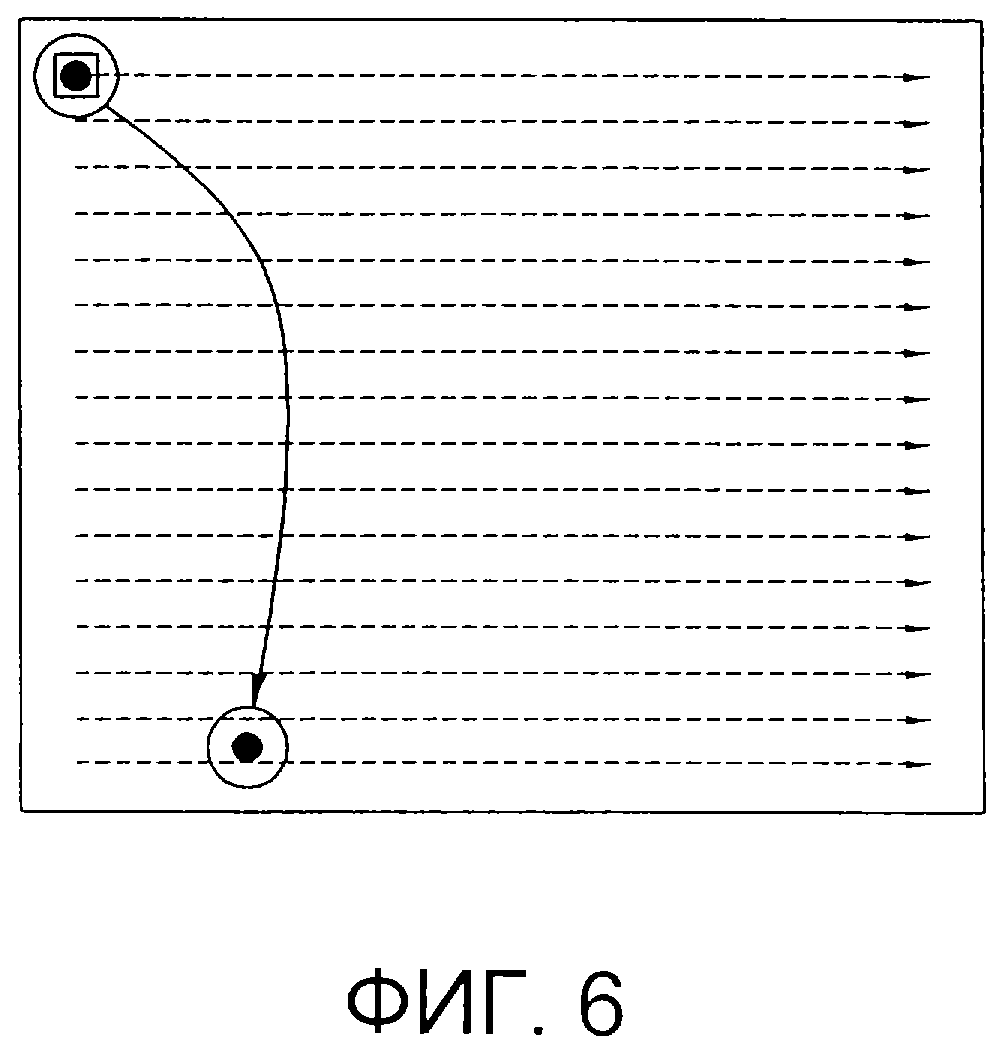
фиг. 6 изображает траекторию перемещения мобильного робота, перемещающегося в соответствии с шаблонным изображением, установленным в процессе обучения;
фиг. 7 изображает блок-схему алгоритма, поясняющую способ обнаружения препятствия устройством обнаружения препятствия предлагаемого мобильного робота;
фиг. 8 поясняет процесс вычисления
расстояния от мобильного робота до препятствия;
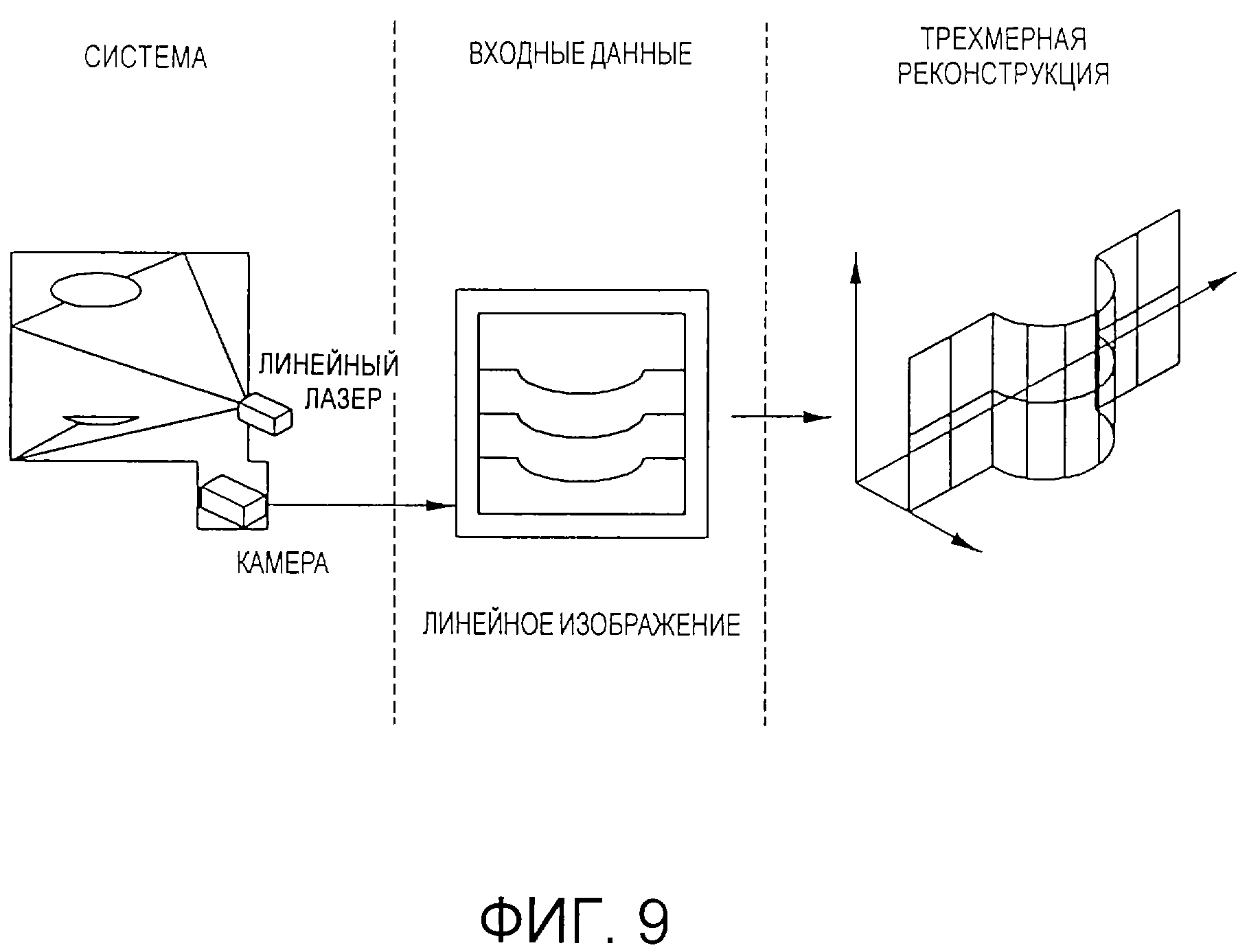
фиг.9 иллюстрирует представление трехмерного изображения с помощью линейных изображений;
фиг. 10 изображает блок-схему алгоритма,
поясняющую корректировку ориентации предлагаемого мобильного робота;
фиг. 11А, 11В, 11С изображают линии, которые образованы базовыми знаками в соответствии с перемещением мобильного робота и
которые показаны в окне изображения первой телекамеры; и
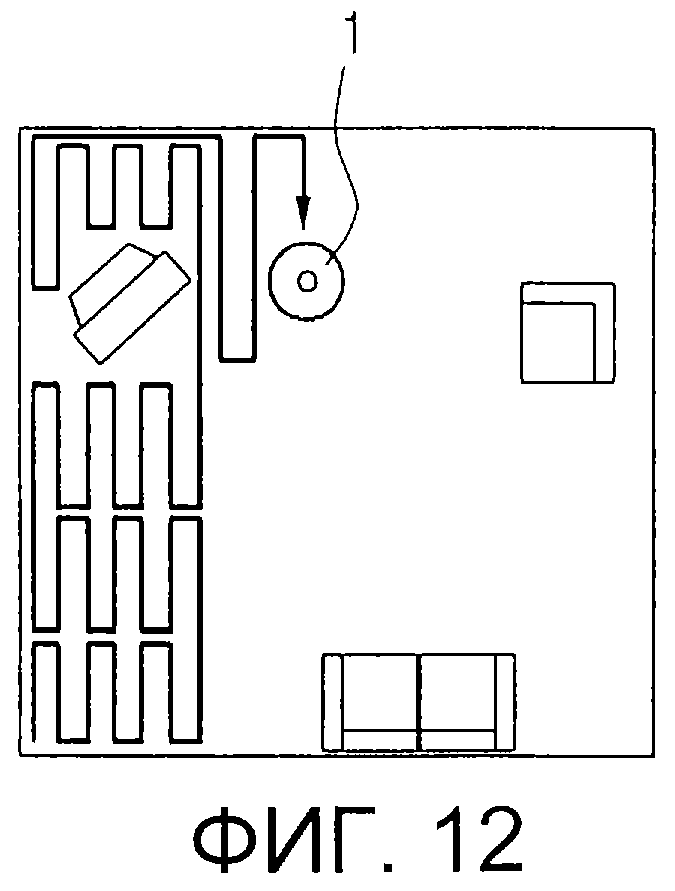
фиг.12 иллюстрирует перемещение с определением местоположения мобильного робота по некоторому курсу.
Предпочтительный пример реализации настоящего изобретения описан ниже со ссылкой на прилагаемые чертежи.
Как показано на фиг. 2 и 3, мобильный робот 1 содержит перемещающее устройство 30 для перемещения его по плоской поверхности, устройство 20 определения местоположения для определения местоположения робота 1 с использованием первой обзорной телекамеры 21 на основе ПЗС (приборов с зарядовой связью), устройство 40 обнаружения препятствия для обнаружения наличия препятствия на пути робота 1, дистанционно управляемый приемопередатчик 50 для приема команд пуск/стоп от робота 1 и передачи этих команд на него и источник питания 60 для аккумуляции электроэнергии и питания соответствующих компонентов робота 1.
Перемещающее устройство 30 содержит два колеса 33, выполненных с возможностью перемещения вперед, назад, влево и вправо, двигатель 32 для привода колес 33 и управляющее устройство 31 двигателя для управления двигателем 32 в соответствии с сигналами, получаемыми управляющим устройством 31 от управляющей части 10.
Устройство 20 содержит первую телекамеру 21, размещенную вертикально для создания изображения потолка с закрепленным на нем базовым знаком 70 (фиг. 5). Кроме того, устройство 20 содержит первую видеоплату 21 для установки соответствующих порогов изображений, снятых телекамерой 21.
Устройство 40 содержит линейный лазер 41 для излучения линейного светового пучка по направлению перемещения робота 1, вторую обзорную телекамеру 43 для распознавания линейного светового пучка, отраженного от препятствия на пути робота 1, и вторую видеоплату 45 для обработки изображений, снятых телекамерой 43.
Лазер 41 часто называют "линейным излучателем", так как он излучает линейный световой пучок в виде прямой линии на плоскости изображения. Плоскость изображения перпендикулярна оптической оси лазера 41. Лазер 41, установленный на передней стороне робота 1, обнаруживает наличие любого препятствия, которое может находиться на пути робота.
Телекамера 43 установлена выше лазера 41 для фиксации любого линейного светового пучка лазера 41, отраженного от препятствия. Кроме того, телекамера 43 содержит присоединенный к ней фильтр для того, чтобы исключительно распознавать отраженный световой пучок, излученный лазером 41. Фильтр также исключительно пропускает ту длину волны, которая соответствует линейному световому пучку лазера 41, так что телекамера 43 имеет возможность исключительно распознавать линейный световой пучок, излученный лазером 41.
Вторая видеоплата 45 установлена на одной стороне телекамеры 43 и присоединена проводами к ней, а также к управляющей части 10.
Дистанционно управляемый приемопередатчик 50 позволяет пользователю дистанционно управлять пуском и остановом робота 1.
Источником питания 60 является аккумуляторная батарея, которая хранит и подает электропитание заданного уровня на соответствующие компоненты робота 1.
Для общего управления роботом 1 управляющая часть 10 связана с управляющим устройством 31 перемещающего устройства 30, устройством 20, устройством 40, приемопередатчиком 50 и источником питания 60. Управляющая часть 10 содержит видеопроцессор 11 с микропроцессором для вычисления данных о местоположении на основе видеоданных, переданных с первой и второй видеоплат 23 и 45. Таким образом, управляющая часть 10 использует информацию о своем местоположении и информацию о местоположении и форме препятствия, чтобы установить точку цели и курс перемещения робота 1. Далее управляющая часть 10 направляет робот 1 правильным курсом к точке цели. Информацию о местоположении мобильного робота получают на основании видеоданных о базовом знаке 70, полученных путем съемки потолка с закрепленным на нем базовым знаком 70 телекамерой 21 и обработкой полученного изображения первой видеоплатой 23. Информацию о местоположении и форме препятствия получают на основании линейных видеоданных, полученных путем съемки препятствия телекамерой 43 устройства 40 и обработки полученного изображения видеоплатой 45.
Работа робота 1 подробно описана ниже.
Перемещение робота 1 и процесс определения его местоположения с использованием телекамеры 21 описаны со ссылками на фиг.4.
Сначала при получении роботом 1 команды запуска управляющая часть 10 устанавливает исходное состояние и проверяет заданные направление и расстояние (этапы S10 и S11). При отсутствии данных о заданном направлении и расстоянии управляющая часть 10 запрашивает видеоданные от устройства 20 (этап S12). Получив от управляющей части 10 запрос на видеоданные, устройство 20 определения местоположения использует первую телекамеру 21 для съемки потолка с места текущего положения робота 1. Основываясь на изображении, полученном первой телекамерой 21, устанавливают и передают на видеопроцессор 11 управляющей части 10 соответствующий порог (этап S13). Получив видеоданные с первой видеоплаты 23, видеопроцессор 11 определяет местоположение и направление опорных точек 71 и 73 базового знака 70 при помощи региональной корреляции и выдает данные о требуемом расстоянии и направлении перемещения устройства 30 (этап S14). Базовый знак 70, закрепленный на потолке, может быть выполнен из любого подходящего материала, распознаваемого телекамерой 21. Для более четкого распознавания целесообразно использовать опознавательные знаки. Пример базового знака изображен на фиг.5. Знак 70 представляет собой опознавательный знак, имеющий пластину 75, большую опорную точку 71 и малую опорную точку 73. Большая опорная точка 71 служит для определения базового местоположения, а малая опорная точка служит для контроля за направлением мобильного робота на основании ее соотношения с большой опорной точкой 71.
Управляющая часть 10 передает данные о расстоянии и направлении перемещения с процессора 11 на устройство 30, и это устройство работает на перемещение, направление и расстояние которого заданы сигналом из управляющей части 10 (этап S15).
Способ поиска опорных точек 71 и 73 с помощью региональной корреляции порога видеоданных подробно описан ниже.
Региональная корреляция представляет собой процесс сравнения шаблонных видеоданных базового знака 70 с видеоданными изображения потолка, полученными путем съемки с некоторого расстояния, и определение местоположения, указывающего на аналогичное шаблонное изображение в окне изображения, полученного первой телекамерой 21. Как указано стрелкой на фиг.6, операцию обучения по шаблонному изображению базового знака 70 выполняют по направлению вниз.
Далее, положение, при котором шаблонное изображение аналогично изображению мобильного робота 1, определяется следующим образом. Сначала со всей площади видеоданных изображения, снятого с некоторого расстояния, получают коэффициенты региональной корреляции шаблонного изображения, являющегося результатом операции обучения. Затем выбирают область, имеющую наибольший коэффициент корреляции, так как она имеет изображение, наиболее сходное с изображением опорных отметок 73 и 75 базового знака 70, на который нацелен робот 1. Положение базового знака 70 выражают с помощью изображения, снятого телекамерой 21 и сформированного в окне изображения (W) в координатах, выраженных в пикселах. Таким образом, используя исходные координаты базового знака 70 и его координаты в окне текущего изображения (W), получают данные о текущем местоположении и направлении робота 1. Кроме того, так как положение базового знака 70 получают в координатах, выраженных в пикселах, в любой выборочный период, в течение которого осуществляется съемка потолка телекамерой 21, также получают перемещение и путь робота 1.
Коэффициент региональной корреляции описывается следующим выражением:
где r(dx, dy) - коэффициент региональной корреляции, f1 - обучающее шаблонное изображение,


Способ обнаружения наличия препятствия при перемещении описан ниже со ссылками на фиг.7.
Способ обнаружения препятствия включает следующие этапы: нацеливание линейного лазера 41 для излучения линейного светового пучка в направлении препятствия на пути мобильного робота (этап S31); распознавание телекамерой 43 линейного светового пучка, отраженного от препятствия (этап S32); преобразование видеоплатой 45 изображения с телекамеры 43 в видеоданные, пригодные для программной обработки (этап S33), и вычисление расстояния от робота 1 до препятствия на основании этих видеоданных (этап S34).
На этапе излучения (S31), когда линейный лазер 41 направляет линейный световой пучок на препятствие, форма препятствия обусловливает искажение этого светового пучка. На этапе распознавания (S32) телекамера 43 формирует изображение, распознавая отраженный искаженный световой пучок, прошедший через фильтр. На этапе обработки видеоданных (S33) вторая видеоплата 45 производит пороговую обработку для упрощения изображения, распознаваемого на этапе распознавания (S32), и прореживание для уменьшения размеров изображения, насколько это возможно. На этапе вычисления расстояния (этап S34) расстояние от робота 1 до препятствия вычисляют на основании видеоданных, полученных на этапе обработки видеоданных (S33). Робот 1 повторяет перечисленные этапы процесса обнаружения препятствия до тех пор, пока не получит всю информацию о препятствии на своем пути.
Расстояние от робота 1 до
препятствия несложно определить тригонометрическими преобразованиями нескольких величин. Как изображено на фиг.8, этими величинами являются: угол (θLP) между лазером 41 и роботом 1,
расстояние (yLP) между телекамерой 43 и лазером 41, расстояние (f0) между линзой 43а телекамеры 43 и плоскостью 43b изображения, на которой формируют изображение препятствия, и
расстояние (y1) от плоскости изображения 43b до центра линзы 43а. На основании этих величин расстояние (Z) от робота 1 до препятствия получают из тригонометрического уравнения (см.
фиг.8):

Преобразуем
заменяя
x0 = yLP•tanθLP and y = (Z•y1)/f0,
и получим
Так как угол (θLP) между лазером 41 и роботом 1, расстояние (f0) между линзами 43а телекамеры 43 и плоскостью 43b и значение x0 = yLP•tanθlp выражены постоянными величинами, то расстояние (Z) от робота 1 до препятствия можно получить, определив только величину (y1), соответствующую расстоянию по горизонтали от центра линз 43а до края изображения видеоданных, сформированного на плоскости изображения.
Решая указанные уравнения с использованием видеоданных, можно определить форму препятствия.
Согласно еще одному предпочтительному примеру реализации настоящего изобретения, трехмерное изображение также можно получить, используя несколько линейных лазеров 41. Лазеры 41 установлены для излучения световых пучков на препятствие с таким углом падения, чтобы телекамера 43 могла распознать линейный световой пучок, падающий на препятствие. Лазеры 41 излучают линейные световые пучки на препятствие, а телекамера 43 распознает их отражения. Затем путем видеообработки отраженных световых пучков получают трехмерное изображение. Фиг.9 иллюстрирует процесс формирования трехмерного изображения из линейных изображений. В этом случае робот 1 получает более точные данные о препятствии, например о форме препятствия.
В заключение, ниже подробно описан способ достижения целевого местоположения при поддержании правильного направления.
При получении роботом 1 команды запуска управляющая часть 10 устанавливает исходное состояние и запрашивает видеоданные с устройств 20 и 40. Получив запрос управляющей части 10 о видеоданных, устройство 20 осуществляет съемку потолка, на котором установлен базовый знак 70, и создает изображение. Затем видеоплата 23 преобразует изображение в пороговое и передает его в управляющую часть 10. В устройстве 40 использованы линейный лазер 41 и телекамера 43 для получения видеоданных препятствия на пути мобильного робота и передачи их в управляющую часть 10.
В управляющей части программными средствами обрабатывают видеоданные, полученные с устройства 20 и устройства 40, для получения информации о препятствии и текущем местоположении мобильного робота. Затем управляющая часть 10 устанавливает целевое местоположение и маршрут до него на основании полученной информации.
Управляющая часть 10 передает перемещающему устройству 30 команду на перемещение по выбранному маршруту, через заданные интервалы периодически проверяет координаты базового знака и определяет, перемещается ли робот 1 по заданному маршруту. Если координаты базового знака 70 отклоняются от заданного маршрута, управляющая часть 10 управляет перемещающим устройством 30 так, чтобы переместить робот 1 в противоположном направлении, и таким образом робот 1 придерживается правильного маршрута. После нескольких корректировок маршрута, когда робот 1 достигает целевого местоположения, он прекращает перемещение или продолжает его при наличии последующей команды.
Способ достижения определенного текущего местоположения робота 1 управляющей частью 10 соответствует способу определения местоположения робота 1, описанному выше, поэтому описание этого способа опускается.
Ниже подробно описан со ссылками на фиг. 10, 11А, 11В и 11С способ контроля курса и корректировки направления мобильного робота 1 при его отклонении от заданного курса.
Управляющая часть 10 запрашивает устройство 20 о видеоданных базового знака 70. Получив запрос от управляющей части 10, устройство 20 осуществляет съемку потолка, на котором закреплен базовый знак 70, и формирует его изображение. Затем видеоплата 23 преобразует изображение в видеоданные, пригодные для программной обработки, и передает их в управляющую часть 10 (этап S51).
Управляющая часть 10 вычисляет координаты базового знака 70 с использованием процесса региональной корреляции, который идентичен процессу определения местоположения робота 1, с использованием видеоданных, переданных с устройства 20 (этап S52).
Далее управляющая часть 10 сравнивает координаты базового знака 70, полученные при текущем местоположении мобильного робота, с координатами маршрута, определенными на этапе определения маршрута (этап S53).
Если текущие координаты базового знака не совпадают с координатами заданного курса, управляющая часть 10 вычисляет отклонение направления и расстояния от заданных координат курса. Затем управляющая часть 10 управляет двигателем 32 перемещающего устройства 30 так, чтобы перемещением робота 1 скомпенсировать отклонения, перемещая его в направлении, противоположном отклонению (этап S54). Например, если робот 1 отклоняется от курса вправо от базового знака 70, управляющая часть 10 управляет двигателем 32 так, чтобы перемещать перемещающее устройство 30 влево, то есть обратно на заданный курс. Эти процессы проиллюстрированы фиг.11А, 11В и 11С. Фиг.11А изображает местоположение базовых знаков 70 на окне изображения (W) первой телекамеры 21, когда робот 1 перемещается по прямому пути. Фиг.11В также изображает местоположение базовых знаков 70 на окне изображения (W) первой телекамеры 21, когда робот 1 отходит от прямого пути, а фиг.11С изображает местоположение базовых знаков 70, когда мобильный робот 1 возвращается к своему пути перемещения. Позициями 71 и 73 на фиг. 11А обозначены опорные точки базового знака 70.
Далее управляющая часть 10 определяет, является ли текущее местоположение целевым (этап S55). Если нет, то управляющая часть 10 запрашивает у устройства 20 видеоданные базового знака 70 для того, чтобы определить, совпадают ли координаты робота 1 с координатами заданного пути.
Управляющая часть 10 периодически повторяет вышеупомянутые процессы через заданные интервалы до тех пор, пока робот 1 не достигнет целевого положения для того, чтобы робот 1 придерживался заданного курса перемещения.
Фиг. 12 изображает перемещение робота 1, который может определять свое местоположение и маневрировать между предметами в помещении. Такой робот можно использовать в быту, например, в качестве робота-пылесоса. В этом случае робот 1 дополнительно содержит пылесос с всасывающим отверстием для всасывания мусора, пылесборник для сбора мусора из всасываемого воздуха и двигатель для создания всасывающей тяги. Курс перемещения робота-пылесоса 1 можно задать предварительно разными вариантами программ в зависимости от географии комнаты.
Как описано выше, предлагаемый робот 1 может определять свое текущее местоположение и перемещаться заданным курсом, не перемещаясь повторно по одному и тому же месту.
Кроме того, так как предлагаемый робот 1 может получать информацию о форме препятствия при помощи лазера 41 и телекамеры 43, он может определить, объехать препятствие или переехать через него в зависимости от характера препятствия.
Кроме того, предлагаемый робот 1 определяет свое местоположение с помощью телекамеры 21, определяет, сохранять ли ему текущий маршрут перемещения, и корректирует ориентацию, если он обнаруживает отклонение от желаемого направления.
Выше изложен и описан предпочтительный пример реализации настоящего изобретения. Тем не менее следует иметь в виду, что настоящее изобретение не следует ограничивать только этим примером.
В рамках представленной ниже формулы изобретения специалистами могут быть выполнены различные изменения и модификации.
Реферат
Изобретение относится к мобильным роботам. Мобильный робот содержит устройство для перемещения мобильного робота по помещению, устройство для обнаружения наличия препятствия, управляющую часть, соединенную с устройством для перемещения мобильного робота и устройством для обнаружения препятствия и управляющую ими, устройство для определения текущего местоположения мобильного робота, соединенное с управляющей частью, и источник питания. Устройство для определения текущего местоположения мобильного робота содержит первую обзорную телекамеру для создания изображения потолка помещения и распознавания базового знака на потолке и первую видеоплату, обрабатывающую изображение, полученное с первой обзорной телекамеры, и передающую данные в управляющую часть. Источник питания соединен с управляющей частью и аккумулирует электроэнергию и питает устройство для перемещения мобильного робота, устройство для обнаружения препятствия, устройство для определения местоположения и управляющую часть. Устройство для обнаружения препятствия содержит линейный лазер для излучения линейного светового пучка по направлению к препятствию, вторую обзорную телекамеру для распознавания отраженного от препятствия линейного светового пучка, и вторую видеоплату для обработки видеоданных, полученных второй телекамерой. Изобретение позволит определять местоположение робота и корректировать его направление при обнаружении препятствия. 3 с. и 8 з.п.ф-лы, 12 ил.

Формула
17.11.2000 по пп. 1-8;
22.11.2000 по пп. 9-11.
Комментарии