Система и способ автоматического возвращения самоходного робота к зарядному устройству - RU2306591C1
Код документа: RU2306591C1
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к самоходному роботу, а конкретнее - к системе и способу автоматического возвращения самодвижущегося робота к зарядному устройству, причем самоходный робот может быстро и точно возвращаться к зарядному устройству по информации инфракрасного изображения инфракрасного модуля, предусмотренного на зарядном устройстве, которая вводится от камерного модуля, предусмотренного на самоходном роботе.
Предшествующий уровень техники
Роботы разрабатываются для промышленных целей и используются как часть заводской автоматики. Роботы также используются вместо людей для сбора информации в экстремальной окружающей среде, в которую люди не имеют доступа. Разработки роботов быстро развиваются, поскольку роботы используются в наиболее передовой индустрии космических разработок. Недавно разработаны удобные для человека домашние роботы. Типичным примером удобного домашнего робота является самоходный робот-уборщик.
Самоходный робот-уборщик представляет собой устройство, которое отсасывает пыль и иные посторонние предметы в процессе автоматического передвижения в конкретной очищаемой зоне, такой как квартира или офис. Дополнительно к элементам общего пылесоса, который отсасывает пыль или иные посторонние предметы, самоходный робот-уборщик включает в себя движущий блок для перемещения робота, несколько датчиков обнаружения для обнаружения разнообразных препятствий, чтобы робот двигался без столкновений с препятствиями в очищаемой зоне, аккумулятор для подачи мощности к каждому компоненту робота и микропроцессор для управления каждым компонентом робота.
С помощью датчиков обнаружения робот-уборщик определяет расстояние до различных препятствий, таких как мебель и стены, в очищаемой зоне и чистит очищаемую зону в процессе передвижения без столкновения с препятствиями, используя полученную информацию.
Недавно стал использоваться самоходный робот-уборщик, который имеет камерный модуль для детектирования предметов в очищаемой зоне, чтобы очистить очищаемую зону, не пропустив какой-нибудь ее части.
Этот самоходный робот может не только обнаруживать свое собственное положение, но также получать точную информацию относительно очищаемой зоны через изображения окружения, полученные камерным модулем, так что он может более точно чистить очищаемую зону, не пропустив какой-либо ее части.
С другой стороны, поскольку самоходный робот работает от аккумулятора, как описано выше, у него для удобства пользователя есть функция автоматической зарядки аккумулятора. Посредством этой функции автоматической зарядки аккумулятора самоходный робот определяет уровень зарядки своего аккумулятора и, если уровень зарядки ниже, чем опорный уровень, самоходный робот автоматически возвращается к зарядному устройству, предусмотренному в определенном месте в очищаемой зоне, и возобновляет работу уборщика после того, как аккумулятор полностью зарядится зарядным устройством.
В известном способе автоматического возвращения самоходного робота-уборщика к зарядному устройству самоходный робот находит положение зарядного устройства путем детектирования инфракрасного света, излучаемого от инфракрасного передатчика, предусмотренного на зарядном устройстве, с помощью инфракрасного датчика, установленного на самоходном роботе, чтобы возвращаться к зарядному устройству.
Однако в известном способе требуется длительное время, чтобы инфракрасный датчик на самоходном роботе обнаружил инфракрасный свет, излучаемый из инфракрасного передатчика, поскольку инфракрасный датчик не только имеет более узкий диапазон приема света, но также не может обнаружить инфракрасный сигнал, когда самоходный робот находится на большом расстоянии от инфракрасного передатчика. Если детектирование инфракрасного света, излучаемого инфракрасным передатчиком, занимает длительное время, аккумулятор может разрядиться, и самоходный робот может остановиться по пути назад к зарядному устройству.
Сущность изобретения
Технической задачей настоящего изобретения является создание системы и способа автоматического возврата самоходного робота к зарядному устройству, причем самоходный робот быстро определяет положение зарядного устройства на основании информации инфракрасного изображения инфракрасного модуля, предусмотренного на зарядном устройстве, которая вводится из камерного модуля, размещенного на самоходном роботе, что обеспечит быстрый и точный возврат к зарядному устройству самоходного робота.
Поставленная задача в соответствии с настоящим изобретением решена путем создания системы, содержащей самоходный робот и зарядное устройство, для автоматического возврата самоходного робота к зарядному устройству, причем зарядное устройство излучает инфракрасный свет из инфракрасного модуля в ответ на сигнал запроса зарядки, принимаемый от самоходного робота через беспроводный приемопередатчик, и выдает сигнал инфракрасного излучения согласно излучению инфракрасного света, при этом самоходный робот обменивается разнообразными данными с зарядным устройством, выдает сигнал запроса зарядки на зарядное устройство, когда напряжение аккумулятора самоходного робота ниже, чем опорное напряжение, и перемещается назад к зарядному устройству с помощью информации изображений, введенной из камерного модуля, который фиксирует изображения, вводимые через объектив, в ответ на сигнал инфракрасного излучения, принятый от зарядного устройства, причем самоходный робот содержит также микропроцессор для управления передвижением самоходного робота для возврата самоходного робота к зарядному устройству с помощью информации положения инфракрасного света в картинке, вводимой из камерного модуля, если инфракрасный свет обнаруживается в картинке, вводимой из камерного модуля.
В системе и способе автоматического возврата самоходного робота к зарядному устройству согласно настоящему изобретению положение зарядного устройства определяется на основании информации инфракрасного светового устройства, вводимой из камерного модуля, размещенного на самоходном роботе, без использования отдельно установленного инфракрасного или ультразвукового датчика, который традиционно использовался для возврата самоходного робота к зарядному устройству. Это позволяет самоходному роботу быстрее возвращаться к зарядному устройству.
Краткое описание чертежей
Вышеуказанные признаки и преимущества настоящего изобретения будут более понятны из приведенного ниже подробного описания со ссылками на сопровождающие чертежи, на которых:
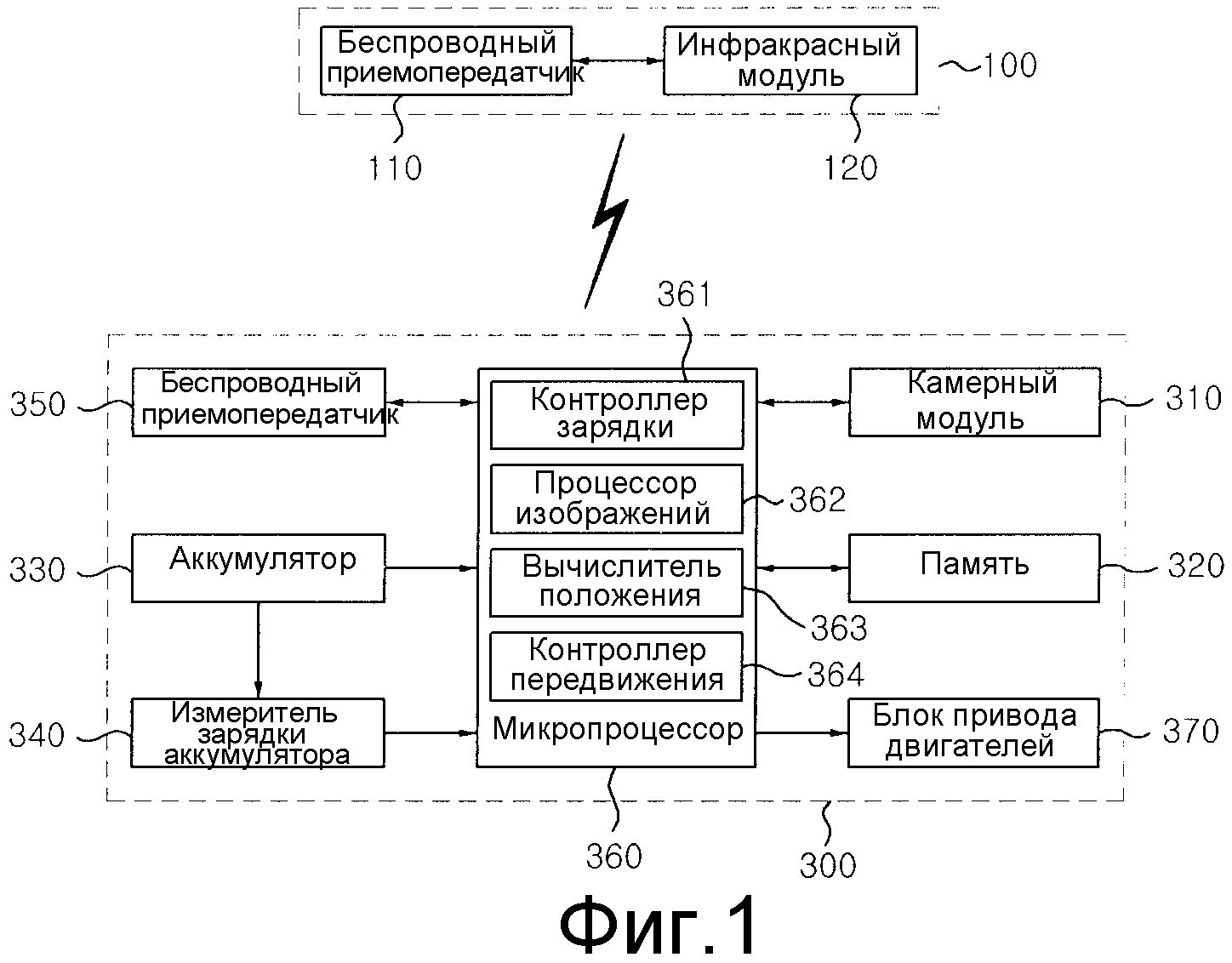
фиг.1 изображает блок-схему системы для автоматического возврата самоходного робота к зарядному устройству согласно изобретению;
фиг.2 - блок-схему последовательности операций способа автоматического возврата самоходного робота к зарядному устройству согласно изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
В приведенном описании самоходный робот согласно настоящему изобретению пояснен на примере робота-уборщика. Однако без ограничений самоходный робот согласно изобретению включает в себя любого робота, который автоматически возвращается к зарядному устройству, когда его аккумулятор почти разряжен, и который активируется после того, как аккумулятор полностью заряжен.
На фиг.1 представлена блок-схема системы для автоматического возврата самоходного робота к зарядному устройству согласно настоящему изобретению.
Система для автоматического возврата самоходного робота к зарядному устройству содержит зарядное устройство 100 и самоходный робот 300. Зарядное устройство 100 стимулирует самоходный робот 300 возвращаться к зарядному устройству 100, когда самоходному роботу 300 необходимо зарядиться, и подает питание на самоходный робот 300, когда он возвращается к зарядному устройству 100. Самоходный робот 300 выполняет операцию очистки согласно команде от пользователя в процессе передвижения в конкретной зоне, используя информацию изображения окружающей обстановки, вводимую из камерного модуля.
Зарядное устройство 100 системы автоматического возврата робота согласно настоящему изобретению передает данные на самоходный робот 300 и принимает данные от самоходного робота 300, и стимулирует возврат самоходного робота 300 к зарядному устройству 100. Зарядное устройство 100 содержит беспроводный приемопередатчик 110 для беспроводной передачи данных к самоходному роботу 300 и приема данных от самоходного робота 300 и инфракрасный модуль 120 для излучения инфракрасного света. Зарядное устройство 100 содержит также вывод питания (не показан), через который мощность подается на самоходный робот 300, когда самоходный робот 300 стыкуется с зарядным устройством 100.
В этом варианте осуществления беспроводный приемопередатчик 110 передает и принимает беспроводный сигнал через один из следующих модулей: Bluetooth, беспроводной локальной сети (ЛС) (LAN) и Zigbee, которые являются модулями связи беспроводной локальной зоны. В другом варианте осуществления беспроводный приемопередатчик 110 может быть воплощен согласно схеме инфракрасной связи с помощью инфракрасных сигналов. В этом случае зарядное устройство 100 выполняет обмен данными с самоходным роботом 300 через инфракрасный модуль 120, который содержит инфракрасный передатчик для наложения заданного сигнала на инфракрасный свет и излучения этого инфракрасного света и инфракрасный приемник для демодуляции принятого инфракрасного света.
Инфракрасный модуль 120 приводит в действие светоизлучающий элемент для излучения инфракрасного света в ответ на сигнал запроса зарядки, который принимается от самоходного робота 300 через беспроводный приемопередатчик 110. Когда инфракрасный модуль 120 излучает инфракрасный свет через светоизлучающий элемент, зарядное устройство 100 передает сигнал инфракрасного излучения, указывающий рабочее состояние светоизлучающего элемента, на самоходный робот 300 через беспроводный приемопередатчик 110.
Иными словами, в варианте осуществления настоящего изобретения при приеме сигнала запроса зарядки через беспроводный приемопередатчик 110 зарядное устройство 100, выполненное как описано выше, активирует инфракрасный модуль 120 на излучение инфракрасного света, чтобы стимулировать самоходный робот 300 возвратиться к зарядному устройству 100, а также передает сигнал инфракрасного излучения, указывающий статус инфракрасного излучения, на самоходный робот 300 через беспроводный приемопередатчик 110.
Ниже описан самоходный робот 300, являющийся компонентом системы автоматического возврата самоходного робота к зарядному устройству согласно изобретению, перемещение которого согласуется с рабочим состоянием зарядного устройства, выполненного как описано выше.
Самоходный робот 300 согласно варианту осуществления настоящего изобретения содержит камерный модуль 310, память 320, аккумулятор 330, измеритель 340 зарядки аккумулятора, беспроводный приемопередатчик 350, микропроцессор 360 и блок 370 привода двигателей. Камерный модуль 310 фиксирует изображение, принимаемое через объектив. Память 320 хранит программу работы самоходного робота 300 и информацию об изображениях, вводимых из камерного модуля 310. Аккумулятор 330 подает питание на каждый компонент самоходного робота 300. Измеритель 340 зарядки аккумулятора измеряет уровень напряжения аккумулятора 330. Беспроводный приемопередатчик 350 передает данные к зарядному устройству 100 и принимает данные от зарядного устройства 100. Микропроцессор 360 управляет каждым компонентом самоходного робота 300.
Камерный модуль 310 фиксирует различные изображения впереди при передвижении самоходного робота 300. Камерный модуль 310 включает в себя линзовую систему-объектив, блок восприятия изображений, блок преобразования и контроллер камерного модуля. Блок восприятия изображений преобразует оптический сигнал из линзовой системы в аналоговый электрический сигнал. Блок преобразования обрабатывает и преобразует сигнал, выдаваемый из блока восприятия изображений, в цифровой сигнал, имеющий формат, пригодный для ввода в микропроцессор 360. Контроллер камерного модуля управляет всей работой камерного модуля. Камерный модуль с этими компонентами известен в технике и потому его подробное описание здесь опущено.
При передвижении самоходного робота 300 согласно настоящему изобретению он фиксирует изображения окружающей обстановки через камерный модуль 310. Используя информацию зафиксированных изображений, самоходный робот 300 может точнее определить, имеются ли препятствия. Камерный модуль 310 устанавливается на передней части самоходного робота 300, предпочтительно на той же высоте, что и светоизлучающий элемент инфракрасного модуля 120, который предусмотрен на описанном выше зарядном устройстве 100.
Как описано выше, в системе для автоматического возврата самоходного робота к зарядному устройству самоходный робот 300 перемещается, фиксируя изображения окружающей обстановки через камерный модуль 310, и с помощью зафиксированной информации изображений самоходный робот 300 может не только точнее определять, имеются ли препятствия, когда он находится в движении, но может также возвращаться к зарядному устройству 100 путем обнаружения направления инфракрасного света, излучаемого из инфракрасного модуля 120.
Память 320, которая состоит из энергонезависимой памяти, такой как СППЗУ (EEPROM) или флэш-памяти, хранит рабочую программу для работы самоходного робота. Память 320 хранит также информацию минимальной зарядки аккумулятора, необходимую для выполнения чистки, например уровень опорного напряжения аккумулятора. Память 320 хранит также различную информацию изображений, зафиксированных камерным модулем 310. Микропроцессор 360 управляет доступом к данным, сохраненным в памяти 320.
Измеритель 340 зарядки аккумулятора измеряет напряжение аккумулятора 330, встроенного в самоходный робот 300. Конкретнее, измеритель 340 зарядки аккумулятора делит напряжение, выдаваемое из аккумулятора 330, посредством определенного соотношения сопротивлений и измеряет и выдает поделенное напряжение на микропроцессор 360.
Микропроцессор 360 отображает текущий уровень аккумулятора на индикаторной шкале уровня зарядки аккумулятора согласно измеренному уровню напряжения, принятому от измерителя 340 зарядки аккумулятора.
Беспроводный приемопередатчик 350 выполняет обмен данными с беспроводным приемопередатчиком 110 зарядного устройства 100. В варианте осуществления настоящего изобретения беспроводный приемопередатчик 350 передает и принимает беспроводный сигнал через один из следующих модулей: Bluetooth, беспроводной локальной сети (ЛС) (LAN) и Zigbee, которые являются модулями связи беспроводной локальной зоны.
В другом варианте осуществления беспроводный приемопередатчик 110 может быть воплощен согласно схеме инфракрасной связи с помощью инфракрасных сигналов. В этом варианте осуществления зарядное устройство 100 выполняет обмен данными с самоходным роботом 300 через инфракрасный модуль 120, который включает в себя инфракрасный передатчик для наложения заданного сигнала на инфракрасный свет и излучения этого инфракрасного света и инфракрасный приемник для демодуляции принятого инфракрасного света, а самоходный робот 300 передает и принимает различные данные через модуль инфракрасной связи, соответствующий инфракрасному модулю 120 зарядного устройства 100. Конкретнее, модуль инфракрасной связи самоходного робота 300 включает в себя инфракрасный передатчик для наложения заданного сигнала на инфракрасный свет и излучения этого инфракрасного света и инфракрасный приемник для демодуляции принятого инфракрасного света. Такая инфракрасная связь известна в технике, а потому ее подробное описание здесь опущено.
Блок 370 привода двигателей управляет двигателями левого и правого колес, соединенными с левым и правым колесами, согласно сигналам управления двигателями (т.е. сигналами управления перемещением), принимаемым от микропроцессора 360.
Микропроцессор 360 самоходного робота 300 согласно варианту осуществления настоящего изобретения управляет всей работой самоходного робота 300 на основании данных рабочей программы, хранящейся в памяти 320. Согласно одному объекту настоящего изобретения микропроцессор 360 управляет передвижением самоходного робота 300 для возврата к зарядному устройству 100 с опорой на информацию положения инфракрасного света, полученную из информации изображений, вводимых через камерный модуль 310.
Конкретнее, микропроцессор 360 согласно изобретению содержит контроллер 361 зарядки, процессор 362 изображений, вычислитель 363 положения и контроллер 364 передвижения (фиг.1).
Когда напряжение аккумулятора самоходного робота, принимаемое от измерителя 340 зарядки аккумулятора, становится ниже опорного напряжения, контроллер 361 зарядки выдает на беспроводный приемопередатчик 350 сигнал запроса зарядки, запрашивающий, чтобы зарядное устройство 100 зарядило аккумулятор. При приеме сигнала инфракрасного излучения через беспроводный приемопередатчик 350 в ответ на сигнал запроса зарядки контроллер 361 зарядки управляет блоком 370 привода двигателей так, чтобы самоходный робот 300 перемещался везде в окружающих зонах для поиска инфракрасного света, излучаемого зарядным устройством 100, согласно заранее заданному алгоритму перемещения.
Как описано выше, самоходный робот 300 фиксирует изображения окружающей обстановки в процессе передвижения в окружающих зонах для поиска инфракрасного света, согласно управляющему сигналу контроллера 361 зарядки.
Процессор 362 изображений сохраняет картинки, принятые из камерного модуля 310, в памяти 320 и сравнивает информацию изображений предыдущей картинки, хранящейся в памяти 320, с информацией изображения текущей картинки, вводимой из камерного модуля 310, чтобы обнаружить инфракрасный свет, излучаемый из инфракрасного модуля 120 зарядного устройства 100.
В варианте осуществления настоящего изобретения процессор 362 изображений обнаруживает инфракрасный свет, излучаемый из инфракрасного модуля 120, установленного на зарядном устройстве 100, на основании разности между информацией изображения (например, информация цвета или яркости) зафиксированных картинок, вводимых из камерного модуля 310 согласно данным рабочей программы самоходного робота 300. Когда камерный модуль 310 фиксирует картинку, включающую в себя инфракрасное изображение, эта картинка изменяется по сравнению с предыдущей картинкой по цвету или яркости вследствие инфракрасного изображения, так что процессор 362 изображений обнаруживает изменение цвета или яркости.
Вычислитель 363 положения вычисляет положение инфракрасного света в зафиксированной картинке, когда процессор 362 изображений обнаруживает инфракрасный свет в зафиксированной картинке. Например, вычислитель 363 положения вычисляет направление от центра зафиксированной картинки на центр обнаруженного инфракрасного изображения.
На основании информации положения, выдаваемой из вычислителя 363 положения, микропроцессор 360 в самоходном роботе 300 выдает управляющий сигнал на блок 370 привода двигателей левого/правого колес через контроллер 362 передвижения, так что самоходный робот 300 передвигается согласно управляющему сигналу.
На основании информации положения инфракрасного света, вводимой из вычислителя 363 положения, контроллер 364 передвижения выдает сигнал управления передвижением, чтобы обеспечить расположение инфракрасного света в центре зафиксированной картинки, т.е. в центре объектива.
Каждый раз, когда самоходный робот 300 перемещается на конкретное расстояние, самоходный робот 300 сравнивает информацию изображения предыдущей картинки, сохраненной в памяти 320, с информацией изображения текущей картинки, вводимой из камерного модуля 310, и выдает сигнал управления передвижением для самоходного робота 300 на блок 370 привода двигателей через контроллер 361 передвижения на основании информации положения инфракрасного света, полученной сравнением, чтобы обеспечить расположение инфракрасного света в центре картинки.
Система для автоматического возврата самоходного робота к зарядному устройству согласно настоящему изобретению может легко обнаружить положение зарядного устройства 100 с помощью информации положения инфракрасного света, полученной из картинки, зафиксированной камерным модулем 310, так что самоходный робот 300 может быстрее вернуться к зарядному устройству 100.
Система согласно настоящему изобретению использует тот факт, что общие камерные модули, установленные на самоходных роботах, могут обнаруживать инфракрасный свет. Общий камерный модуль может легко обнаруживать инфракрасный свет, излучаемый из зарядного устройства, даже когда зарядное устройство удалено, поскольку общий камерный модуль имеет широкий диапазон принимаемого света (т.е. широкий диапазон фиксируемых изображений для изображений, вводимых в камерный модуль через объектив) по сравнению с инфракрасными или ультразвуковыми датчиками, которые традиционно использовались для автоматического возврата самоходного робота к зарядному устройству.
Когда инфракрасный свет обнаруживается в зафиксированной картинке, вводимой из камерного модуля, вычисляется положение инфракрасного света в зафиксированной картинке и осуществляется управление перемещением самоходного робота на основании вычисленного положения инфракрасного света, так что самоходный робот может быстрее вернуться к зарядному устройству.
Ниже описан способ автоматического возврата самоходного робота к зарядному устройству согласно настоящему изобретению.
На фиг.2 представлена блок-схема последовательности операций способа автоматического возврата самоходного робота к зарядному устройству согласно изобретению. Самоходный робот 300 выполняет операцию очистки в конкретной зоне по команде от пользователя (фиг.2) (S100). При выполнении операции очистки самоходный робот 300 измеряет уровень зарядки аккумулятора через определенные временные интервалы посредством измерителя 340 зарядки аккумулятора (S110).
Когда уровень зарядки аккумулятора, принимаемый от измерителя 340 зарядки аккумулятора, становится ниже, чем опорный уровень, установленный в памяти 320 (S120), микропроцессор 360 в самоходном роботе 300 включает режим зарядки (т.е. режим возврата) для возвращения самоходного робота 300 к зарядному устройству 100. Однако, если уровень зарядки аккумулятора, принимаемый от измерителя 340 зарядки аккумулятора, выше, чем опорный уровень, установленный в памяти 320, микропроцессор 360 возвращается к шагу S100 для выполнения операции очистки по команде от пользователя.
Когда уровень зарядки аккумулятора, принимаемый от измерителя 340 зарядки аккумулятора, ниже, чем опорный уровень, установленный в памяти 320, микропроцессор 360 включает режим зарядки, т.е. микропроцессор 360 в самоходном роботе 300 выдает сигнал запроса зарядки на зарядное устройство 100 через контроллер 361 зарядки (S130). В ответ на сигнал инфракрасного излучения, принимаемый от зарядного устройства 100 через беспроводный приемопередатчик 350, самоходный робот 300 передвигается в конкретной зоне для поиска инфракрасного света согласно алгоритму передвижения, хранящемуся в памяти 320, чтобы искать зарядное устройство 100 (S140 и S150). Обмен данными между зарядным устройством 100 и самоходным роботом 300 может выполняться с помощью одного из следующих модулей: Bluetooth, беспроводной локальной сети (ЛС) (LAN) и Zigbee, которые являются модулями связи беспроводной локальной зоны, и может также выполняться с помощью инфракрасного света.
При передвижении для поиска зарядного устройства 100 согласно сигналу инфракрасного излучения, передаваемому из зарядного устройства 100, самоходный робот 300 получает картинки окружающих зон через камерный модуль 310 и сохраняет полученные картинки в памяти 320 (S160).
Затем микропроцессор 360 обнаруживает инфракрасный свет, излучаемый инфракрасным модулем 120 зарядного устройства 100, из картинки, вводимой от камерного модуля 310 (S170). Конкретно, в варианте осуществления настоящего изобретения микропроцессор 360 самоходного робота 300 сравнивает посредством процессора 362 изображений предыдущее изображение, хранящееся в памяти, с изображением текущей картинки, вводимым из камерного модуля 310, чтобы обнаружить инфракрасный свет, излучаемый из инфракрасного модуля 120 зарядного устройства 100.
Когда камерный модуль 310 фиксирует картинку, включающую в себя любую часть изображения инфракрасного света, излучаемого из инфракрасного модуля 120 зарядного устройства 100, информация (или значение) цвета или яркости предыдущей картинки, хранящейся в памяти 320, отличается от такого же значения в зафиксированной картинке, включающей в себя инфракрасное изображение, вводимой из камерного модуля 310, так что процессор 362 изображений самоходного робота 300 обнаруживает инфракрасный свет на основании этого отличия.
Если процессор 362 изображений не обнаруживает инфракрасного света путем сравнения между предыдущей и вводимой картинками, самоходный робот 300 возвращается к шагу S150, чтобы передвигаться для поиска зарядного устройства 100. С другой стороны, если процессор 362 изображений обнаруживает инфракрасный свет на шаге S170, микропроцессор 360 самоходного робота 300 вычисляет положение инфракрасного изображения в зафиксированной картинке посредством вычислителя 363 положения (S180). К примеру, вычислитель 363 положения вычисляет направление из центра зафиксированной картинки к центру инфракрасного изображения.
После этого микропроцессор 360 самоходного робота 300 выдает сигнал управления перемещением в блок 370 привода двигателей через контроллер 364 передвижения, чтобы позволить разместить вычисленное положение инфракрасного изображения в центре картинки, вводимой через объектив (S190).
Каждый раз, когда самоходный робот 300 перемещается на определенное расстояние, самоходный робот 300 сравнивает информацию изображения предыдущей картинки, хранящейся в памяти 320, с информацией изображения текущей картинки, вводимой из камерного модуля 310, и выдает сигнал управления перемещением для самоходного робота 300 на блок 370 привода двигателей через контроллер 361 на основании информации положения инфракрасного света, полученной из сравнения, чтобы позволить инфракрасному свету расположиться в центре картинки.
Как очевидно из вышеприведенного описания, в системе и способе автоматического возврата самоходного робота к зарядному устройству положение зарядного устройства определяется на основании информации изображения инфракрасного света, вводимой из камерного модуля, предусмотренного на самоходном роботе, без использования отдельно установленного инфракрасного или ультразвукового датчика, который традиционно используется для возврата самоходного робота к зарядному устройству. Это позволяет самоходному роботу быстрее вернуться к зарядному устройству.
В системе используется тот факт, что общие камерные модули, установленные на самоходных роботах, могут обнаруживать инфракрасный свет. Общий камерный модуль может легко обнаруживать инфракрасный свет, излучаемый из зарядного устройства, даже когда зарядное устройство удалено, поскольку общий камерный модуль имеет широкий диапазон принимаемого света (т.е. широкий диапазон фиксации изображений для изображений, вводимых в камерный модуль через объектив) по сравнению с инфракрасными или ультразвуковыми датчиками, которые традиционно используются для автоматического возврата самоходного робота к зарядному устройству.
Когда в зафиксированном изображении, вводимом из камерного модуля, обнаруживается любая часть инфракрасного света, передвижение самоходного робота управляется на основании положения инфракрасного света в зафиксированной картинке, так что самоходный робот может быстрее вернуться к зарядному устройству.
Возможны различные видоизменения, дополнения и замены без отхода от объема и сущности изобретения, как раскрыто в прилагаемой формуле изобретения.
Реферат
Предлагаются система и способ автоматического возврата самоходного робота к зарядному устройству. Технический результат - быстрый и точный возврат к зарядному устройству самоходного робота. Зарядное устройство излучает инфракрасный свет из инфракрасного модуля в ответ на сигнал запроса зарядки, принимаемый от робота через беспроводный приемопередатчик, и выдает сигнал инфракрасного излучения согласно излучению инфракрасного света. Самоходный робот обменивается различными данными с зарядным устройством, выдает сигнал запроса зарядки на зарядное устройство, когда уровень зарядки аккумулятора ниже, чем опорный уровень, и перемещается назад к зарядному устройству с помощью информации изображения, вводимой из камерного модуля, в ответ на сигнал инфракрасного излучения из зарядного устройства. Робот включает в себя микропроцессор для управления перемещением робота для возврата к зарядному устройству с помощью информации положения инфракрасного света в картинке, вводимой из камерного модуля, если инфракрасный свет обнаруживается в картинке, вводимой из камерного модуля. 3 н. и 13 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Система робота-пылесоса, имеющая внешнее зарядное устройство, и способ стыковки с зарядным устройством
Робот-уборщик (варианты), робототехническая система-уборщик и способ управления ими
Робот-пылесос, система уборки помещения роботом и способ управления роботом
Комментарии