Робот-уборщик (варианты), робототехническая система-уборщик и способ управления ими - RU2242159C1
Код документа: RU2242159C1
Чертежи






Описание
Предпосылки создания изобретения
1. Область техники, к которой относится изобретение
Изобретение относится к роботу-уборщику, робототехнической системе-уборщику и к способу управления ими, и, в частности к роботу-уборщику, робототехнической системе-уборщику и к способу управления ими, выполненным и реализуемому с возможностью распознавания расстояния и направления движения, чтобы определять маршрут движения с помощью информации изображения пола, фотографируемого во время движения робота-уборщика по полу.
2. Уровень техники
Обычный робот-уборщик движется по контуру рабочего участка, который окружен стеной или препятствием, с помощью ультразвукового датчика, установленного в основном корпусе для определения протяженности рабочего участка, и затем планирует маршрут движения для своей работы, такой, как уборка или охрана, на заранее определенном рабочем участке. Затем робот-уборщик вычисляет расстояние движения и текущее свое положение с помощью сигнала, обнаруживаемого таким датчиком, как кодер, выполненный с возможностью обнаружения числа и угла вращения колес, чтобы привести колеса в движение для перемещения по спланированному маршруту движения. Но этот обычно применяемый способ для движения робота-уборщика по маршруту движения может давать ошибки между расстоянием движения и вычисленным положением по причине неровностей пола, пробуксовки колес и др. Чем больше расстояние хода робота-уборщика, тем больше ошибок распознавания положения может накопиться. Накопившиеся ошибки положения могут, соответственно, послужить причиной отклонения робота-уборщика от спланированного маршрута. Следовательно, возможно, что уборка данного определенного участка не будет выполнена, либо будет производиться повторно на других участках, в результате чего производительность по уборке может снизиться, и в некоторых случаях работа по охране не осуществится.
Соответственно, существует необходимость обеспечения робота-уборщика, выполненного с возможностью эффективного выполнения заданной работы с помощью точного определения расстояния и направления движения, чтобы точно определять маршрут независимо от пробуксовки, неровностей пола или некоторых других обстоятельств, обусловливающих ошибки.
Сущность изобретения
В основу данного изобретения положена задача решения по меньшей мере указанных выше проблем и/или устранения указанных выше недостатков и обеспечения робота-уборщика, робототехнической системы-уборщика и способа управления ими, выполненных и осуществляемого с возможностью эффективного выполнения заданной работы за счет точного распознавания расстояния и направления движения робота-уборщика.
Указанные выше задачи и преимущества реализуют путем обеспечения робота-уборщика для выполнения работ во время перемещения его по полу, содержащего: основной корпус, блок привода для приведения в движение совокупности колес, расположенных на нижней части основного корпуса; направленную вниз камеру, расположенную между колесами на нижней части основного корпуса, для фотографирования изображений пола перпендикулярно направлению движения робота-уборщика; и блок управления для распознавания расстояния и направления движения колес с помощью информации изображения пола, фотографируемого направленной вниз камерой, и для управления приводным блоком согласно заданной работе с помощью распознанных и запомненных расстояния и направления движения колес.
Блок управления предпочтительно сравнивает текущее изображение пола, фотографируемое направленной вниз камерой, с предыдущими изображениями пола, запомненными направленной вниз камерой, чтобы распознавать расстояние и направление движения колес. Направленная вниз камера предпочтительно фотографирует изображения пола со скоростью 1500 раз в секунду.
Робот-уборщик также предпочтительно содержит осветительное средство, расположенное на нижней части основного корпуса, для освещения участка, фотографируемого направленной вниз камерой, чтобы сделать этот участок более ярким, чем окружающие участки.
В соответствии с еще одной особенностью данного изобретения робот-уборщик для выполнения работ во время его перемещения по полу содержит: основной корпус; блок привода для приведения в движение совокупности колес, расположенных на нижней части основного корпуса; направленную вниз камеру, расположенную между колесами на нижней части основного корпуса, для фотографирования изображений пола перпендикулярно направлению движения робота-уборщика; направленную вверх камеру, расположенную сверху основного корпуса, для фотографирования изображений потолка перпендикулярно направлению движения; и блок управления для распознавания положения робота-уборщика с помощью информации изображения потолка, фотографируемого направленной вверх камерой, и для распознавания расстояния и направления движения колес с помощью информации об изображениях пола, фотографируемого направленной вниз камерой, и также для управления блоком привода согласно заданной работе с помощью распознанного запомненного положения, расстояния и направления.
При этом блок управления сравнивает текущее изображение пола, фотографируемое направленной вниз камерой, с предыдущими изображениями пола, запомненными направленной вниз камерой, чтобы распознавать расстояние и направление движения колес.
Указанные выше задачи и преимущества также реализуют робототехнической системой-уборщиком, содержащей робот-уборщик, включающий в себя: основной корпус, блок привода для приведения в движение совокупности колес, расположенных на нижней части основного корпуса; и направленную вверх камеру, расположенную наверху основного корпуса, для фотографирования изображений потолка перпендикулярно направлению движения робота-уборщика; и блок дистанционного управления для осуществления радиосвязи с роботом-уборщиком; при этом робот-уборщик также содержит направленную вниз камеру, расположенную между колесами на нижней части основного корпуса, для непрерывного фотографирования изображений пола перпендикулярно направлению движения; и при этом блок дистанционного управления распознает расстояние и направление движения колес с помощью информации изображения пола, фотографируемого направленной вниз камерой, и управляет блоком привода в соответствии с заданной работой с помощью распознанного расстояния и направления движения колес.
Блок дистанционного управления сравнивает текущее изображение пола, фотографируемое направленной вниз камерой, с предыдущими изображениями пола, запомненными направленной вниз камерой, чтобы распознавать расстояние и направление движения колес.
Робототехническая система-уборщик предпочтительно также содержит осветительное средство, расположенное на нижней части основного корпуса, для освещения участка, фотографируемого направленной вниз камерой, ярче, чем окружающие участки.
Указанные выше задачи и преимущество также реализуют за счет осуществления способа управления роботом-уборщиком, имеющим направленную вниз камеру; причем согласно этому способу: вычисляют маршрут движения к заданному участку, соответствующему работе, после приема команды работать; запоминают изображения пола, фотографируемые направленной вниз камерой; приводят в движение робот-уборщик по вычисленному маршруту движения; и сравнивают текущее изображение пола, фотографируемого направленной вниз камерой, с запомненными изображениями, чтобы вычислить расстояние и направление движения и определить маршрут движения.
С помощью характеризуемых выше робота-уборщика, робототехнической системы-уборщика и способа управления ими: расстояние и направление движения робота-уборщика распознают с помощью изображений пола, фотографируемых направленной вниз камерой, чтобы определить маршрут, в результате чего возможно эффективное выполнение ими заданной работы.
Прочие преимущества, решаемые задачи и признаки данного изобретения отчасти изложены в приводимом ниже его описании, и отчасти они станут очевидными для обычных специалистов в данной области техники по изучении приводимого ниже описания, или они будут узнаны при осуществлении данного изобретения. Задачи и преимущества данного изобретения могут быть реализованы в соответствии с прилагаемой формулой изобретения.
Краткое описание чертежей
Изобретение ниже излагается подробно со ссылкой на чертежи, на которых аналогичные ссылочные обозначения относятся к аналогичным элементам.
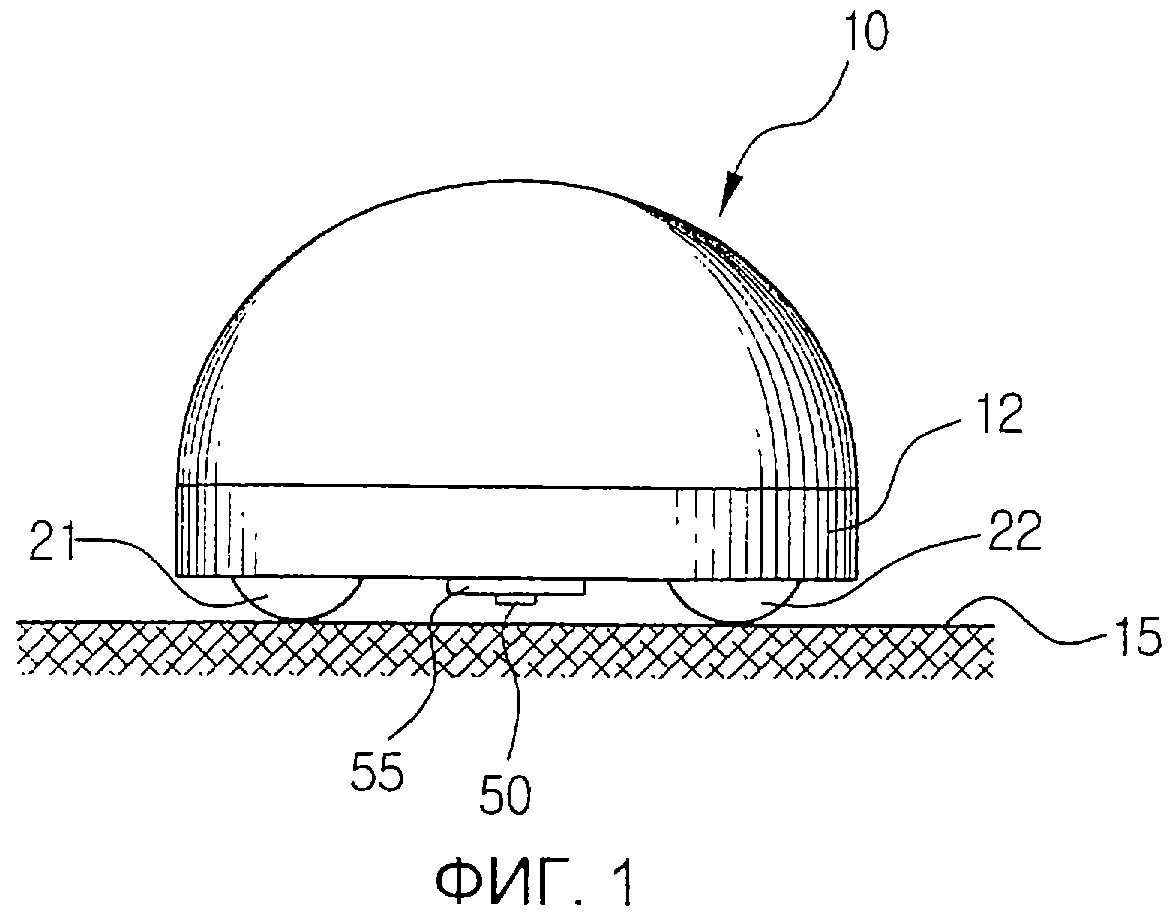
Фиг.1 – вертикальная проекция робота-уборщика, используемого для фотографирования изображений пола во время перемещения по нему в соответствии с данным изобретением.
Фиг.2А – перспектива нижней части робота-уборщика, изображаемого на фиг.1.
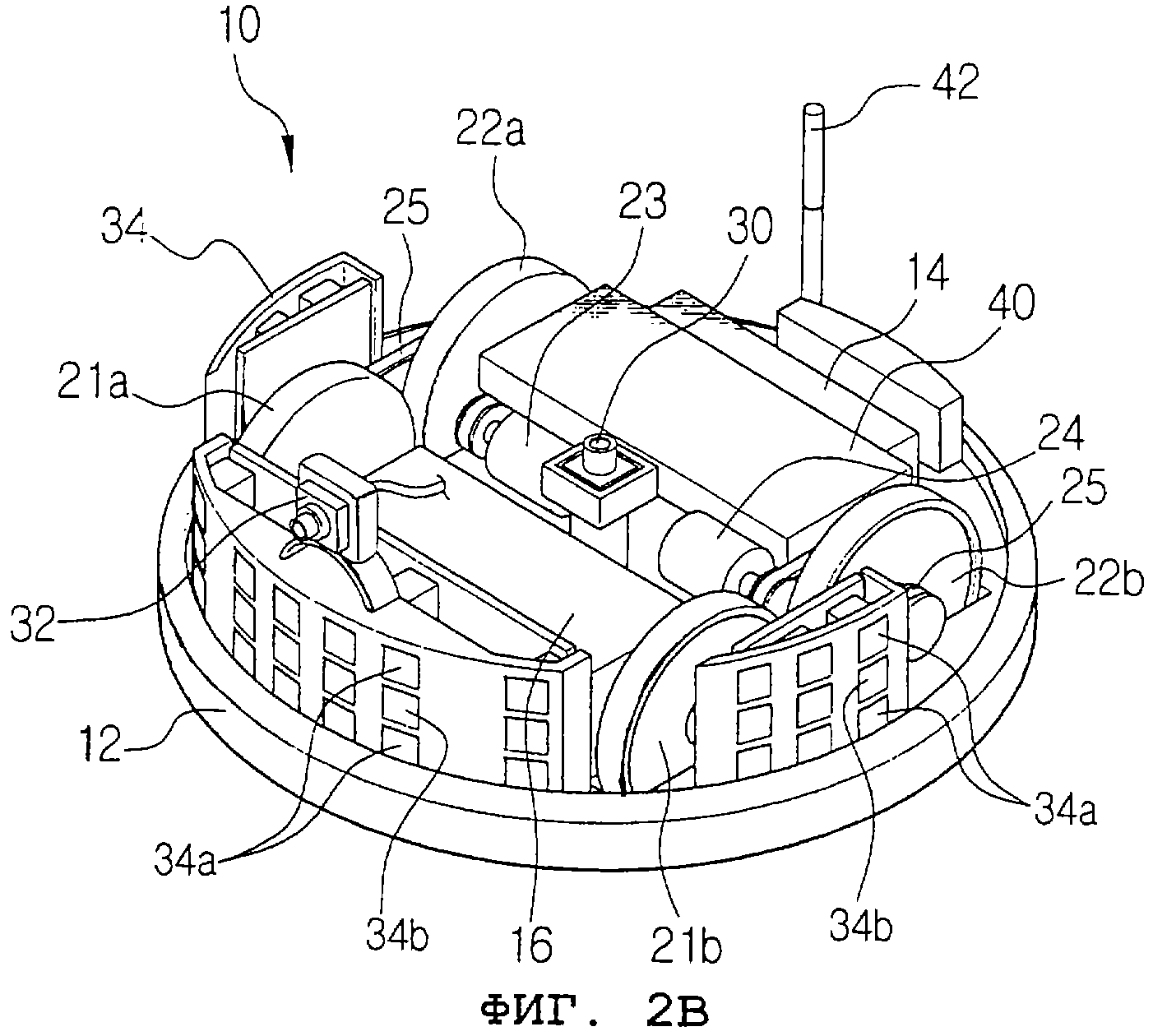
Фиг.2B – перспектива, изображающая робот-уборщик согласно фиг.1, без верхней крышки.
Фиг.3 – блок-схема робототехнической системы-уборщика согласно данному изобретению.
Фиг.4A – горизонтальная проекция изображения пола, фотографируемого направленной вниз камерой робота-уборщика согласно фиг.1, в его неподвижном положении.
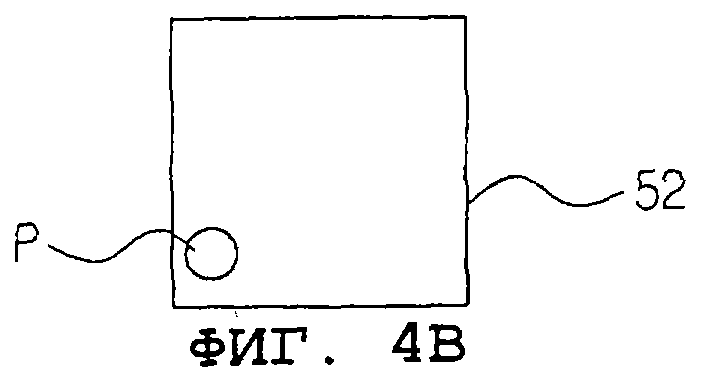
Фиг.4B – горизонтальная проекция, иллюстрирующая изображение пола, фотографируемого направленной вниз камерой робота-уборщика при движении вперед из положения, изображаемого на фиг.4A.
Фиг.4C – горизонтальная проекция, иллюстрирующая изображение пола, фотографируемого направленной вниз камерой робота-уборщика при движении назад из положения, изображаемого на фиг.4A.
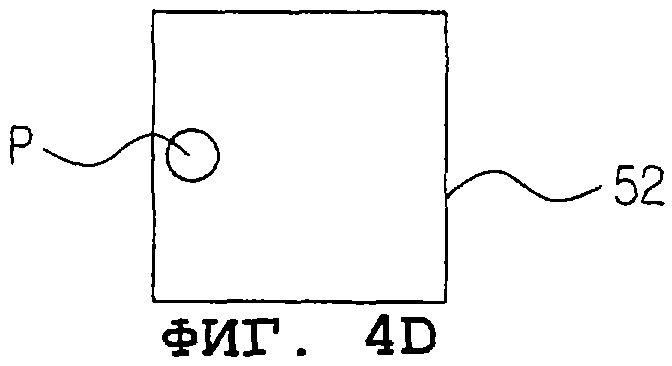
Фиг.4D – горизонтальная проекция, иллюстрирующая изображение пола, фотографируемого направленной вниз камерой робота-уборщика при движении вправо из положения согласно фиг.4A.
Фиг.4E – горизонтальная проекция, иллюстрирующая изображение пола, фотографируемого направленной вниз камерой робота-уборщика при движении влево из положения согласно фиг.4A.
Фиг.4F – горизонтальная проекция, иллюстрирующая изображение пола, фотографируемого направленной вниз камерой робота-уборщика при движении под приблизительным углом 45° влево из положения согласно фиг.4A.
Фиг.5 – блок-схема ЦП (центрального процессора), изображаемого на фиг.3.
Фиг.6 – блок-схема рабочего процесса робота-уборщика согласно изобретению.
Подробное описание предпочтительных осуществлений
Предпочтительные осуществления изобретения далее излагаются подробно со ссылкой на прилагаемые чертежи.
Обращаясь к фиг.1, 2A и 2B: робот-уборщик 10 имеет основной корпус 12, всасывающий блок 16, блок 20 привода, направленную вверх камеру 30, направленную вперед камеру 32, датчики 34 обнаружения препятствия, направленную вниз камеру 50, осветительное средство 55, блок 40 управления, запоминающее устройство 41 и приемопередатчик 43. Источником питания может быть источник аккумулированной электроэнергии, такой, как аккумуляторная батарея 14.
Всасывающий блок 16 установлен на основном корпусе 12 и предназначен для сбора пыли на такой поверхности, как пол, очищаемый за счет втягивания воздуха. Всасывающий блок 16 может быть выполнен с помощью хорошо известных способов. Например, всасывающим блоком 16 может быть всасывающий электродвигатель (не изображен) и камера всасывания для сбора пыли, втягиваемой через отверстие всасывания или трубку всасывания, выполненную, например, на нижней стороне корпуса 12, напротив очищаемого пола, с помощью электродвигателя всасывания.
Блок 20 привода содержит два колеса 21a и 21b, расположенных по обеим сторонам спереди корпуса 12; два колеса 22a и 22b, расположенных по обеим сторонам сзади корпуса 12; электродвигатели 23, 24 для приведения во вращение задних колес, соответственно; и зубчатые ремни 25 для передачи генерируемого усилия на задние колеса 22a, 22b с помощью электродвигателей 23, 24 к передним колесам 21a, 21b. Блок 20 привода приводит в действие электродвигатели 23, 24, соответственно, в направлении вперед или назад согласно сигналам управления, принимаемым от блока 40 управления. Направление движения робота 10 можно определять путем управления электродвигателями 23, 24, чтобы обеспечивать разные количества вращения.
Направленная вперед камера 32 установлена на основном корпусе 12, чтобы фотографировать изображения, находящиеся впереди. Направленная вперед камера 32 выводит фотографируемые изображения в блок 40 управления.
Направленная вверх камера 30 установлена на основном корпусе 12, чтобы фотографировать верхние изображения потолка в направлении вверх. Направленная вверх камера 30 выводит фотографируемые изображения в блок 40 управления. Направленная вверх камера предпочтительно имеет сверхширокоугольный объектив (не изображен).
Сверхширокоугольные объективы имеют по меньшей мере одну линзу, выполненную с возможностью обеспечивать широкий угол поля зрения камеры, аналогично глазу рыбы, например, и может формировать изображение в приблизительных пределах до 180°. Сверхширокоугольный объектив выполнен с возможностью соответствовать нужному диапазону углов поля зрения, с учетом допустимого искажения. Подробное описание сверхширокоугольного объектива здесь не приводится. Но такого рода сверхширокоугольный объектив раскрывают в патентах Кореи №№1996-7005245, 1997-48669, 1994-22112 и др., и его выпускают различные изготовители.
Датчики 34 обнаружения препятствия расположены вокруг цилиндрической стенки корпуса с определенным интервалом, отделяющим их друг от друга, и передают сигналы наружу от корпуса 12 и принимают отраженные сигналы. Каждый из датчиков 34 обнаружения препятствия имеет некоторую совокупность элементов 34а инфракрасного излучения для проецирования инфракрасных лучей и светоприемные элементы 34b для приема отраженных инфракрасных лучей. Элементы 34a инфракрасного излучения и светоприемные элементы 34b расположены по внешнему периметру каждого из датчиков 34 обнаружения препятствия в виде перпендикулярно расположенных пар. Датчики 34 обнаружения препятствия могут также содержать ультразвуковой датчик, выполненный с возможностью проецирования ультразвука и приема отраженных ультразвуковых колебаний. Датчики 34 обнаружения препятствия можно также использовать для измерения расстояния между роботом-уборщиком и препятствием или прилегающей стенкой.
Направленная вниз камера 50 расположена на основном корпусе 12 и предназначена, чтобы фотографировать изображения пола в направлении вниз. Направленная вниз камера 50 выводит фотографируемые изображения в блок 40 управления. Направленная вниз камера 50 выполнена с возможностью фотографирования изображений на высокой скорости в целях быстрого и точного распознавания маршрута движения робота. Направленная вниз камера предпочтительно выполнена с возможностью фотографирования с приблизительной скоростью 1500 раз в секунду.
Осветительное устройство 55 расположено вокруг направленной вниз камеры, расположенной под основным корпусом 12, для освещения участка пола, фотографируемого направленной вниз камерой 50. Осветительное устройство 55 постоянно освещает фотографируемый направленной вниз камерой участок, чтобы сделать его ярче окружающих участков. Осветительное устройство 55 обеспечивает для направленной вниз камеры возможность обнаруживать незначительные различия пола и сводит к минимуму изменения в фотографируемых изображениях благодаря окружающему освещению.
Блок 40 управления обрабатывает принимаемые сигналы приемопередатчиком 43. Если основной корпус 12 содержит клавишное устройство ввода (не изображено), имеющее клавиши, чтобы пользователь мог с помощью их задавать функции, то блок 40 управления может обрабатывать вводимый клавишей сигнал, поступивший от устройства клавишного ввода.
Обращаясь к фиг.1, 2А, 2В и 3: запоминающее устройство 41 запоминает верхнее и нижнее изображения, фотографируемые, соответственно, направленной вверх камерой 30 и направленной вниз камерой 50, и содействует блоку 40 управления в вычислении информации о положении или направлении движения.
Приемопередатчик 43 посылает данные через антенну 42 и передает сигнал, принимаемый по антенне 42, в блок 40 управления.
Способ управления роботом-уборщиком описываемой выше конструкции с помощью блока управления излагается ниже.
Блок 40 управления распознает текущее положение робота с помощью информации об известном положении определенных объектов, таких, как люминесцентные лампы непосредственного светового излучения или устройства пожарной сигнализации, видные в верхних изображениях потолка рабочего участка, фотографируемого направленной вверх камерой, либо с помощью информации о метках, установленных на потолке рабочего участка, для распознавания положения. Запоминающее устройство 41 запоминает стандартную информацию об изображении определенных объектов для сравнения или о метках для распознавания положения, чтобы блок 40 управления смог распознать определенный объект или метки среди изображений, фотографируемых направленной вверх камерой 30. Блок управления 40 затем вычисляет маршрут движения для выполнения заданной работы с помощью распознанной информации о положении и передает сигналы управления в каждую часть, чтобы перемещать робот-уборщик 10 по нужному маршруту движения.
Блок 40 управления распознает расстояние и направление движения робота-уборщика 10 с помощью особых примет, таких, как пятна на изображениях пола, фотографируемых направленной вниз камерой 50, и определяет, должен ли робот-уборщик 10 перемещаться по маршруту движения с помощью распознанных расстояния и направления движения, и тем самым управляет блоком 20 привода, чтобы перемещать робот-уборщик по маршруту движения, без отклонения от него.
То есть блок 40 управления распознает изменения положения особых примет, таких, как пятна, на изображениях путем сравнения текущего изображения пола 15, фотографируемого направленной вниз камерой 50, с изображением пола 15, сфотографированным до текущего изображения направленной вниз камерой 50 и запомненным в запоминающем устройстве 41. Затем блок 40 управления вычисляет расстояние и направление движения робота-уборщика 10 с помощью изменений положения особых примет. Все рисунки на полу отличаются друг от друга, хотя некоторые рисунки могут восприниматься человеческим глазом как одинаковые, но направленная вниз камера 50 может распознавать незначительные различия в рисунках. Есть особые приметы, такие, как пятна и порезы, которые трудно различать человеческим глазом, но которые может распознавать направленная вниз камера 50.
Для обработки изображения могут использоваться различные известные способы, которые выделяют особые приметы из сфотографированных изображений. Например, можно использовать способ, который различает точечные элементы изображения от других соседних точек после преобразования сфотографированного изображения в уровень яркости.
Фиг.4A-4F изображают зависимости выделенных особых примет и направлений движения робота-уборщика 10. Фиг.4A - изображение 52 пола, сфотографированное направленной вниз камерой 50 в определенной точке, когда робот-уборщик 10 остановился или движется. Опорная отметка Р является особой приметой, выделенной из изображения, сфотографированного направленной вниз камерой 50. Особая примета Р в изображении пола перемещается относительно назад, согласно фиг.4B, когда робот-уборщик 10 перемещается вперед; при этом особая примета Р перемещается вперед согласно фиг.4C, когда робот-уборщик 10 движется назад. Далее особая примета Р на изображении пола перемещается влево согласно фиг.4D, когда робот-уборщик 10 движется вправо; при этом особая примета Р перемещается вправо, согласно фиг.4E, когда робот-уборщик 10 движется влево. Особая примета Р перемещается приблизительно на 45° вправо согласно фиг.4F, когда робот-уборщик 10 движется приблизительно на 45° влево.
Когда направленная вниз камера 50 непрерывно фотографирует пол, тогда особая примета Р непрерывно изменяет свои положения в фотографируемых изображениях - согласно тому, как изображено выше. Блок 40 управления затем может определить расстояние и направление движения робота-уборщика 10 от изменений положения особой приметы Р. Затем блок 40 управления определяет, следует ли робот-уборщик 10 вычисленному маршруту движения, и если робот-уборщик 10 отклонился от вычисленного маршрута движения, то блок управления 40 осуществляет управление блоком 20 привода, чтобы тот изменил движение робота-уборщика 10 относительно текущего маршрута для того, чтобы он следовал вычисленному маршруту.
Работа блока 40 управления далее описывается в отношении управления блоком 20 привода посредством направленной вверх камеры 30 и направленной вниз камеры 50.
Блок 40 управления распознает текущее положение робота-уборщика 10 путем сравнения особых примет или меток для распознавания в текущем изображении, вводимом направленной вверх камерой 30, с запомненными особыми приметами и метками для распознавания - после приема сигнала команды работать от устройства клавишного ввода или извне по радиосигналу; и затем осуществляет управление блоком 20 привода в соответствии с заданным маршрутом из распознанного положения. При этом сигнал команды для выполнения работы может содержать команду уборки пола или осуществления охраны с помощью камер.
Блок 40 управления вычисляет ошибку движения с помощью расстояния и направления движения, измеренных направленной вниз камерой 50, и по текущему положению, распознанному путем сравнения фотографируемого сейчас верхнего изображения с ранее сфотографированными верхними изображениями, запомненными в запоминающем устройстве 41, и осуществляет управление блоком 20 привода, чтобы следовать заданному маршруту движения в целях устранения ошибки в вычислении движения.
Приводимое выше описание дает пример, согласно которому блок 20 управления может независимо распознавать положение робота-уборщика 10 непосредственно с помощью информации изображения, фотографируемого направленной вверх камерой 30 и направленной вниз камерой 50.
В соответствии с еще одной особенностью данного изобретения обеспечивают робототехническую систему-уборщика, выполненную с возможностью обрабатывать вычисления, нужные для распознавания извне положения робота-уборщика 10, чтобы снизить вычислительную нагрузку по распознаванию положения робота-уборщика 10.
Обращаясь к фиг.3: робот-уборщик 10 передает от себя по радиосигналу информацию о фотографируемом изображении и далее работает по сигналу управления, принимаемому от внешнего центра управления. Обеспечивают устройство 60 дистанционного управления для осуществления управления роботом-уборщиком 10 с помощью радиосигналов. Устройство 60 дистанционного управления включает в себя радиорелейное устройство 63 и центральный блок 70 управления.
Радиорелейное устройство 63 обрабатывает радиосигнал, принимаемый от робота-уборщика 10, и передает обработанный сигнал в центральный блок 70 управления, и затем с помощью радиосредств направляет сигнал, принятый от центрального блока 70 управления, роботу-уборщику 10 по антенне 62.
Центральный блок 70 управления выполнен как обычный компьютер, пример которого представлен на фиг.5. Обращаясь к фиг.5: центральный блок 70 управления содержит ЦП 71, ПЗУ 72, ЗУПВ 73, дисплей 74, устройство ввода 75, запоминающее устройство 76 и устройство 77 связи.
Запоминающее устройство 76 имеет управляющую программу 76а для обработки сигнала, поступающего от робота-уборщика 10.
В работе: управляющая программа 76а робота-уборщика выводит меню на дисплей 74, чтобы задать управление роботом-уборщиком 10, и обрабатывает пункт меню, выбранный пользователем с помощью устройства 75 ввода, для исполнения его роботом-уборщиком 10. Меню предпочтительно может содержать, как два основных вида работ, команду на выполнение работы по уборке и/или охране. Меню может также содержать более подробные вспомогательные меню для каждого основного вида работ, например: перечень выбираемых участков работы и способов уборки.
Управляющая программа 76а робота-уборщика осуществляет управление роботом-уборщиком 10 по распознаванию текущего положения робота-уборщика 10 путем сравнения информации о положении распознавательных особых примет или меток в текущем верхнем изображении с информацией о положении распознавательных особых примет или меток, запомненной в запоминающем устройстве, и управляет блоком 20 привода согласно заданному маршруту движения из распознанного положения. Управляющая программа 76а робота-уборщика также вычисляет ошибку движения с помощью расстояния и направления движения, вычисленных из принятого изображения пола и текущего положения, распознанного путем сравнения принимаемого в данное время верхнего изображения с ранее сфотографированными верхними изображениями, запомненными в запоминающем устройстве 76; и управляет блоком 20 привода, чтобы следовать заданному маршруту движения, устранив ошибку вычисления движения.
Блок 40 управления роботом-уборщиком 10 управляет блоком 20 привода по сигналу управления, принимаемому от радиорелейного устройства 63, и поэтому значительно снижается рабочая нагрузка внутреннего процессора по обработке изображений для распознавания положения и определения маршрута движения. Блок 40 управления также передает верхнее изображение и изображение пола, регулярно фотографируемые в течение цикла, при этом приводя робота-уборщика 10 в движение, в центральный блок 70 управления через радиорелейное устройство 63.
Далее способ управления роботом-уборщиком 10 с помощью блока 40 управления подробно излагается со ссылкой на фиг.6.
Сначала блок 40 управления определяет, принята ли команда работать - S100.
Если команда работать принята, то блок 40 управления определяет текущее положение робота-уборщика 10 с помощью верхних изображений потолка, фотографируемых направленной вверх камерой 30, и вычисляет маршрут движения для перемещения на заданное положение, которое является рабочим участком или рабочим маршрутом согласно принятой команде работать - S110.
Блок 40 управления затем фотографирует изображения пола направленной вниз камерой 50 и запоминает сфотографированные положения пола - S120.
Затем блок 40 управления приводит робот-уборщик 10 в движение по вычисленному маршруту - S130.
Блок 40 управления вычисляет расстояние и направление движения путем сравнения текущего изображения пола с изображением пола, сфотографированным непосредственно перед этим - из числа изображений, непрерывно фотографируемых направленной вниз камерой 50: S140.
После этого блок 40 управления анализирует текущий маршрут движения робота-уборщика 10, чтобы решить, соответствует ли текущий маршрут вычисленному маршруту движения; и решает, требуется определение текущего маршрута - S150.
Если на этапе S150 принято решение о том, что текущий маршрут движения робота-уборщика 10 требует определения или корректировки, то блок 40 управления определяет или корректирует текущий маршрут с помощью анализированной информации - на этапах S150, S160.
Затем блок 40 управления решает, завершена ли работа - S170. Работой в данном случае является работа, выполняемая приведением в движение робота-уборщика 10; например, перемещением робота-уборщика 10 в заданный участок, или уборка, выполняемая роботом-уборщиком 10 на маршруте. Если работа не завершена, то блок 40 управления повторяет этапы S130-S170 до завершения работы - изображено петлей.
Как указано выше, когда расстояние и направление движения робота-уборщика определяют с помощью изображений пола, фотографируемых направленной вниз камерой согласно изобретению, то ошибка не может возникнуть даже в случае пробуксовки колес блока привода или из-за неровности пола, что может иметь место согласно способам известного уровня техники с использованием кодера. Поэтому робот-уборщик может эффективно выполнять заданную работу.
Хотя данное изобретение проиллюстрировано и изложено со ссылкой на его некоторые предпочтительные осуществления, специалистам в данной области техники будет ясно, что в него можно ввести разные изменения по форме и частностям в рамках его концепции и объема, определяемого прилагаемой формулой изобретения.
Указанные выше осуществления и преимущества являются только иллюстративными, и их не следует истолковывать как ограничение данного изобретения. Данное раскрытие можно удобным образом применить для других типов устройств. Описание данного изобретения предназначается для иллюстрирования, а не для ограничения объема его формулы. Специалисту в данной области техники будут очевидны многие варианты, видоизменения и изменения. В формуле: подразумевается, что пункты “средство плюс функция” включают в себя конструкции, описываемые здесь как выполняющие упоминаемые функции; и не только конструкционные эквиваленты, но также эквивалентные конструкции.
Реферат
Робот-уборщик (варианты), робототехническая система-уборщик и способ управления ими обеспечивают эффективное выполнение очистки по команде путем распознавания расстояния и направления движения робота-уборщика независимо от пробуксовки колес или неровностей пола. Робот-уборщик содержит основной корпус, блок привода для приведения в действие колес, расположенных на нижней части основного корпуса, направленную вниз камеру, расположенную между колесами на нижней части основного корпуса, для фотографирования изображений пола перпендикулярно направлению движения робота-уборщика, и блок управления для распознавания расстояния и направления движения колес с помощью информации изображения, фотографируемого направленной вниз камерой, и для управления блоком привода в соответствии с заданной работой с помощью распознанного расстояния и направления колес. Робот-уборщик в варианте выполнения и робототехническая система-уборщик имеют направленную вверх камеру, расположенную наверху основного корпуса, для фотографирования изображений потолка перпендикулярно направлению движения, и блок управления для распознавания положения робота-уборщика с помощью информации изображения потолка, фотографируемого направленной вверх камерой, и для распознавания расстояния и направления движения колес с помощью информации изображения, фотографируемого направленной вниз камерой. Согласно способу управления роботом-уборщиком вычисляют маршрут движения к заданному участку согласно работе при приеме команды работать, запоминают изображения пола, фотографируемые направленной вниз камерой, приводят в движение робот-уборщик по вычисленному маршруту движения и сравнивают текущее изображение пола, фотографируемое направленной вниз камерой, с запомненными изображениями, вычисляют расстояние и направление движения; и затем корректируют маршрут движения. 4 н. и 9 з.п. ф-лы, 6 ил.
Комментарии