Система маршрутизации для сельхозмашин - RU2423038C2
Код документа: RU2423038C2
Чертежи
Описание
Область техники
Настоящее изобретение относится к системе маршрутизации для сельскохозяйственных машин в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Из патентного документа ФРГ №19629618 известна система маршрутизации для зерноуборочных комбайнов, в которой в разработанном плане маршрутов указываются предположительные положения комбайна при полном заполнении зернового бункера. Для определения степени заполнения зернового бункера обрабатываются данные от так называемых датчиков расхода или уровня заполнения и с учетом вместимости зернового бункера приближенно определяется будущий момент времени полного заполнения. Недостаток таких систем состоит в том, что они определяют конкретное положение пункта опорожнения бункера на основе предварительно заданных маршрутов системы маршрутизации. Если зерноуборочный комбайн отклоняется от этих предварительно заданных маршрутов, как, например, при объезде препятствий, система уже неспособна адекватно указывать положение пункта опорожнения бункера, так как комбайн следует по маршрутам, неизвестным системе маршрутизации. Кроме того, такие системы не обеспечивают возможности взаимодействия между несколькими комбайнами и приданными им погрузочными транспортными средствами.
В отличие от указанного решения, в патентном документе WO 00/35265 раскрыта система управления машинами, которая осуществляет наблюдение и координирует уборочные и транспортные мощности множества уборочных машин и погрузочных транспортных средств. В одной из форм осуществления изобретения предусмотрен вычислительный алгоритм, определяющий ожидаемое положение зерноуборочного комбайна, в котором его зерновой бункер будет заполнен. Это ожидаемое положение перегрузки передается на так называемое погрузочное транспортное средство, так что оно уже может перемещаться к ожидаемому месту опорожнения бункера. Существенный недостаток системы этого типа заключается в том, что геометрическое положение ожидаемого пункта опорожнения бункера определяется в зависимости только от установленного расхода и/или степени заполнения зернового бункера, а географические условия поверхности уборки остаются без учета. Это может привести к тому, что будет определен пункт опорожнения бункера, в котором погрузочное транспортное средство не может быть подведено к комбайну в требуемое положение. Такие ситуации создаются всегда, когда предварительно вычисленный пункт опорожнения бункера лежит в конце поля или в зоне, перекрытой препятствиями, такими как телеграфные столбы или деревья. В этих случаях координационная функция перестает действовать, и водители машин должны определять свои положения обычным образом, на глаз.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники и создании системы маршрутизации, которая гибко учитывает изменяющиеся внешние условия.
В соответствии с изобретением решение поставленной задачи достигается в системе маршрутизации для сельхозмашин, причем к сельхозмашине привязана определенная рабочая ширина для генерирования маршрутов на территории и сельхозмашина содержит, по меньшей мере, одно устройство хранения для приема убранной массы, а убранная масса может перегружаться на погрузочное транспортное средство. Согласно изобретению система выполнена с возможностью подытоживания (балансирования) количества убранной массы, принимаемого устройством хранения убранной массы, в зависимости, по меньшей мере, от одного характерного параметра, причем это подведение итога является динамически адаптируемым, по меньшей мере, к изменениям, по меньшей мере, одного характерного параметра.
За счет того что принимаемое устройством хранения количество убранной массы подытоживается в зависимости, по меньшей мере, от одного характерного параметра и это подведение итога (подведение баланса, балансирование) является динамически адаптируемым, по меньшей мере, к изменениям, по меньшей мере, одного характерного параметра, обеспечивается гибкая адаптируемость системы маршрутизации к изменяющимся внешним условиям.
В предпочтительном примере осуществления характерные параметры образованы характерными параметрами убранной массы и/или характерными параметрами поверхности уборки и/или характерными параметрами машины. Благодаря этому могут учитываться полностью все граничные условия, влияющие на процесс уборки, что в конечном счете обеспечивает возможность эффективной эксплуатации системы взаимосвязанных машин.
В дальнейшем предпочтительном примере осуществления количество убранной массы, принимаемое устройством хранения, воспринимается датчиками, а генерируемые датчиками сигналы характерных параметров количества убранной массы увязываются в блоке обработки, по меньшей мере, с одним характерным параметром, предоставленным блоком обработки, при этом блок обработки генерирует информацию, подытоживающую количество убранной массы. Преимущество решения заключается, прежде всего, в том, что динамическое подведение итога может производиться с помощью надежных и легко устанавливаемых технических средств.
Высокий хозяйственный эффект достигается с помощью системы маршрутизации по изобретению в том случае, когда генерируемая блоком обработки итоговая информация количества убранной массы включает в себя ожидаемое поступление массы и/или ожидаемый пункт опорожнения бункера и/или момент времени опорожнения бункера и/или остаточный участок пути, на котором количество убранной массы транспортируется из устройства хранения убранной массы, поскольку эти величины оказывают решающее влияние на непрерывный процесс уборки с минимальными простоями на опорожнение бункеров.
В особенно эффективном примере выполнения изобретения подведение итога включает в себя определение мгновенной величины заполнения зернового бункера и прогнозирование географического положения пункта опорожнения в системе маршрутизации с учетом, по меньшей мере, одного характерного параметра поверхности уборки. Особенное преимущество решения состоит в том, что могут полностью учитываться географические ограничения, налагаемые территорией, подлежащей уборке. При этом, с одной стороны, процесс опорожнения бункера может осуществляться при движущемся зерноуборочном комбайне и, с другой стороны, при неподвижном погрузочном транспортном средстве его положение может быть выбрано так, что комбайн может подойти к нему быстро и без особых маневров.
В дальнейшем предпочтительном примере осуществления блок обработки, по меньшей мере, с учетом степени заполнения устройства хранения убранной массы, установленного, т.е. вычисленного, пункта опорожнения бункера, положения, по меньшей мере, одного погрузочного транспортного средства и выработанного маршрута определяет стратегию опорожнения зернового бункера, которая адаптируется, по меньшей мере, к одному из этих параметров в зависимости от остальных параметров.
В особенно предпочтительном примере осуществления подведение итога включает в себя подготовку (резервирование) требуемой еще вместимости для опорожнения бункера в зависимости от ожидаемого количества убранной массы. За счет этого обеспечивается постоянная возможность предоставления требуемой вместимости для опорожнения бункера и устраняются непродуктивные простои на ожидание.
В предпочтительном примере осуществления подготовка (резервирование) требуемой вместимости для опорожнения в виде подытоживания продолжительности пребывания осуществлена таким образом, что в зависимости от степени заполнения устройства хранения убранной массы и/или установленного (вычисленного) пункта опорожнения бункера, по меньшей мере, одно погрузочное транспортное средство курсирует между несколькими сельхозмашинами для приема от них убранной массы с учетом критерия оптимизации. Преимущество заключается в том, что погрузочные транспортные мощности, имеющиеся в распоряжении на подлежащей обработке территории, могут оптимальным образом курсировать между подлежащими разгрузке комбайнами без простоев этих комбайнов.
Критерий оптимизации представляет собой «короткий проход погрузочного транспортного средства по территории, подлежащей обработке» и/или «оптимальное заполнение погрузочного транспортного средства» и/или «приоритетный выбор сельхозмашины для подхода». За счет этого обеспечивается меньшее число проходов по территории, подлежащей обработке, в целях бережного обращения с почвой и малые простои системы машин.
В дальнейшем решении по развитию изобретения управление одним или несколькими погрузочными транспортными средствами производится автоматически в зависимости, по меньшей мере, от установленного (вычисленного) пункта опорожнения бункера. Преимущество заключается в том, что погрузочное транспортное средство может гибко и быстро реагировать на состояние заполнения бункера одного или нескольких комбайнов.
В особенно предпочтительном примере осуществления, по меньшей мере, одна сельхозмашина и, по меньшей мере, одно погрузочное транспортное средство снабжены, по меньшей мере, одним графическим индикаторным устройством для визуального представления установленного пункта опорожнения бункера. В таком случае простым образом обеспечивается прямая связь между машинами, работающими совместно на одной территории.
Для того чтобы водитель мог быстро получать существенную для него информацию системы маршрутизации, графическое индикаторное устройство отображает (представляет) участки пути, причем эти участки пути структурированы различным образом в зависимости от их характера. В этом отношении представление (отображение) является особенно наглядным, когда графическое представление (графическая индикация или графическое отображение) участков пути включает в себя, по меньшей мере, представление обработанного участка пути и участка пути еще предстоящей обработки в зависимости от установленного пункта опорожнения бункера. В этом случае водитель комбайна получает непосредственную информацию об оставшемся участке пути до ближайшего опорожнения бункера.
В предпочтительном примере выполнения изобретения характерные параметры убранной массы могут включать в себя вид убираемой культуры, влажность убранной массы, расход убранной массы, расход зернового потока, соотношение содержания зерна и соломы или комбинацию этих характерных параметров убранной массы. Полный учет самых различных граничных условий достигается также в том случае, когда характерные параметры поверхности уборки включают в себя геометрию поля, маршруты системы маршрутизации, наклоны косогоров, положение препятствий или комбинацию этих характерных параметров поверхности уборки. То же самое относится к решению, при котором характерные параметры машины включают в себя степень заполнения устройства хранения убранной массы, количество убранной массы, подаваемое к устройству хранения, количество убранной массы, отводимое из устройства хранения, характерные данные, по меньшей мере, одного погрузочного транспортного средства или комбинацию этих характерных параметров машины.
За счет того что отображение участков пути динамически адаптируется к изменяющимся граничным условиям, обеспечивается постоянное информирование водителя машины в составе системы машин о происходящих изменениях.
В предпочтительном примере осуществления пункт опорожнения бункера, момент времени опорожнения бункера и остаточный участок пути альтернативно или в комбинации визуально представляются на индикаторном устройстве и являются динамически адаптируемыми к наступающим изменениям. Преимущество решения состоит в том, что водитель сельхозмашины получает наглядно структурированную информацию о процессе опорожнения бункеров, и это позволяет ему, с одной стороны, быстро воспринимать изменения и вмешиваться, когда этого требуют внешние условия.
Дальнейшие предпочтительные примеры осуществления и дополнительные решения по развитию изобретения изложены в зависимых пунктах.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах:
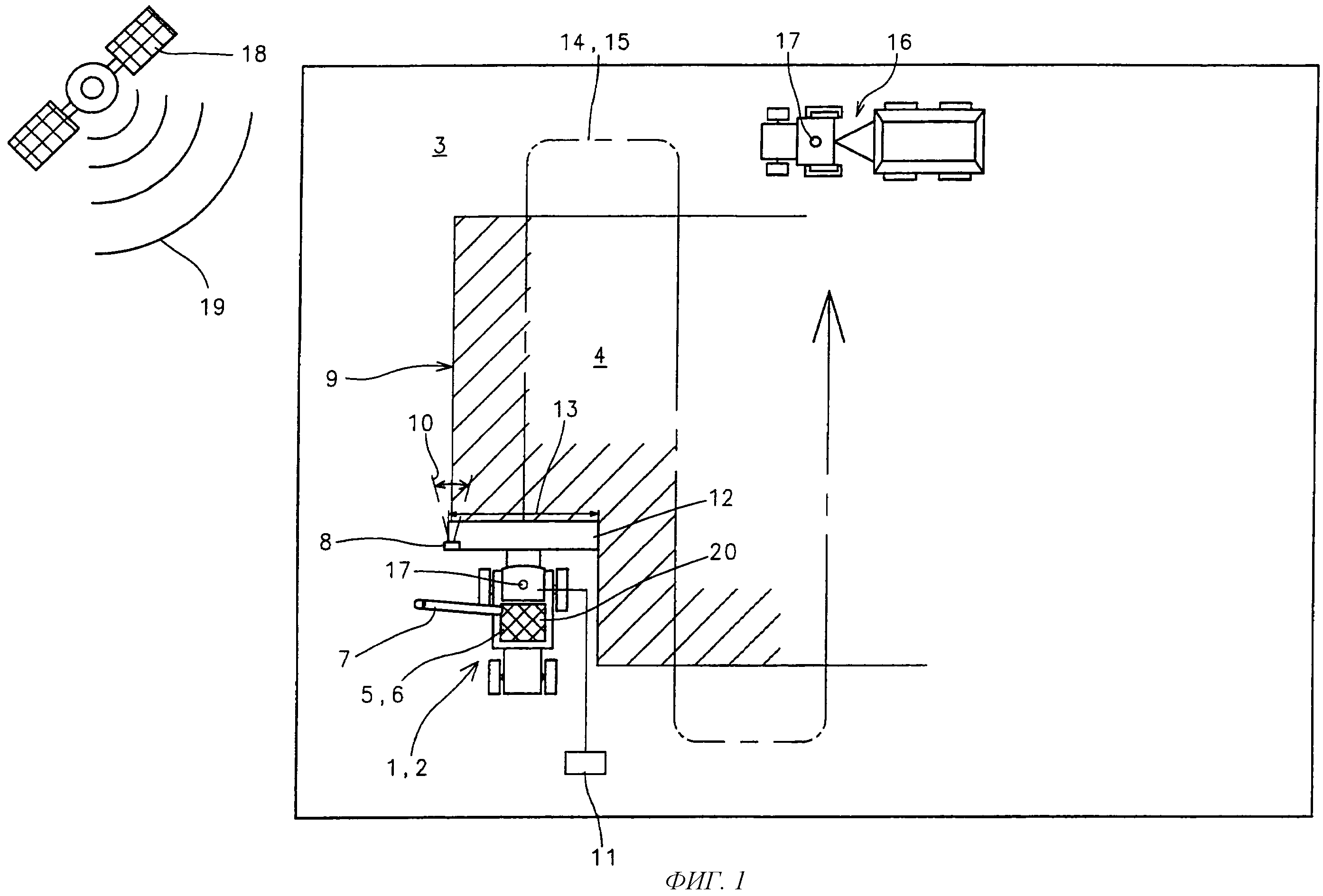
фиг.1 изображает на виде сверху систему маршрутизации по изобретению применительно к зерноуборочному комбайну и погрузочному транспортному средству для опорожнения зернового бункера комбайна,
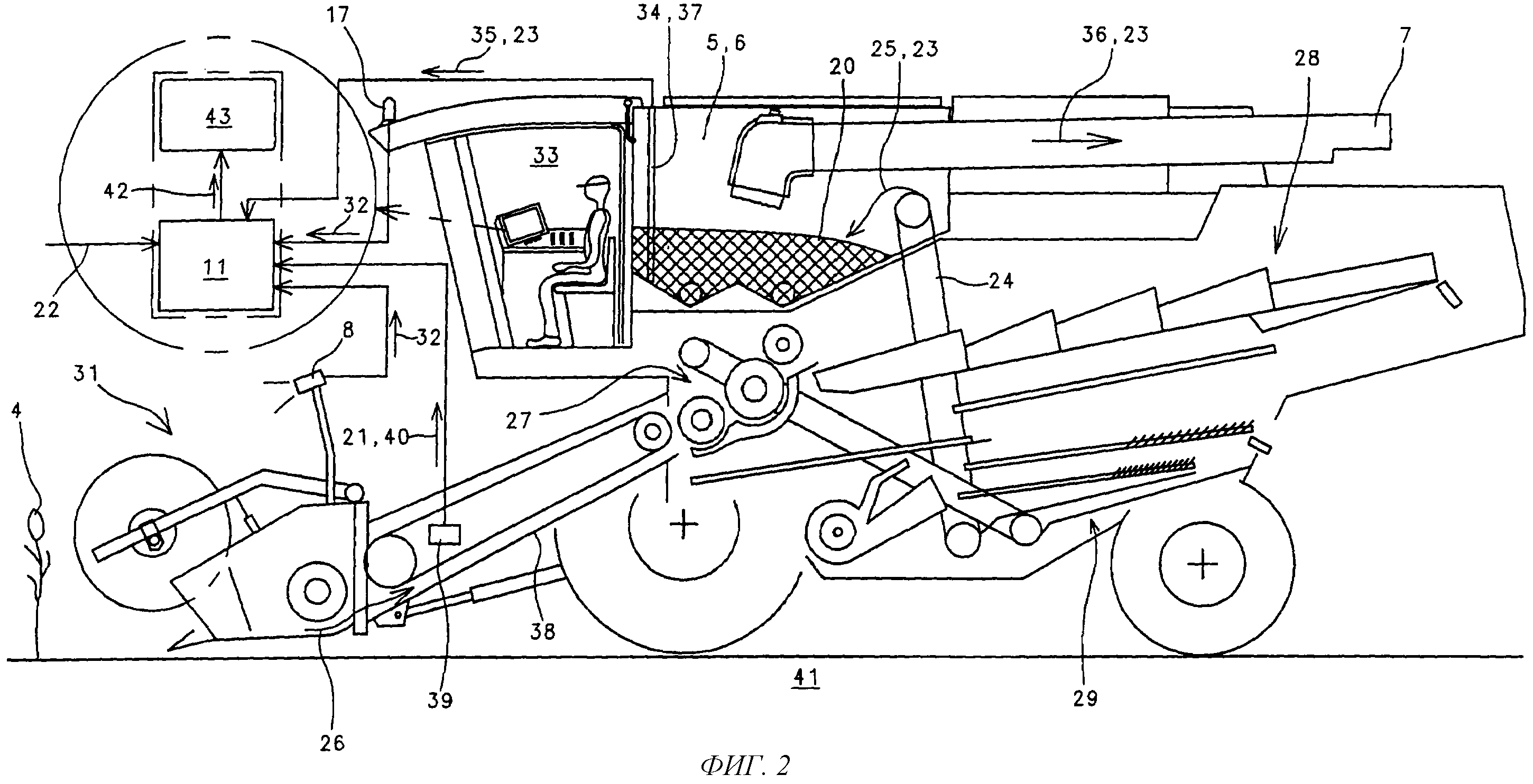
фиг.2 схематично изображает зерноуборочный комбайн на виде сбоку,
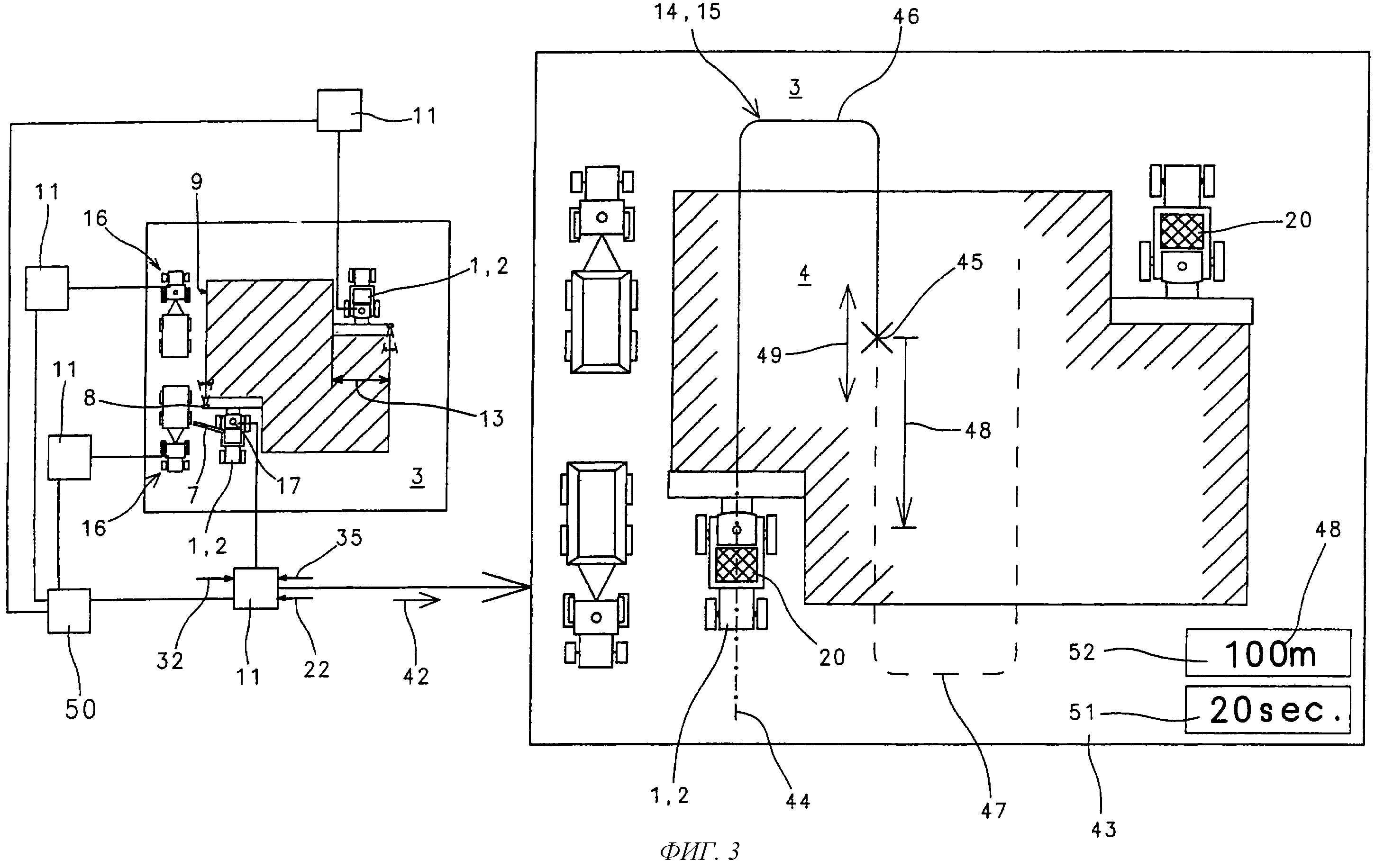
фиг.3 схематично изображает систему маршрутизации по изобретению в более подробном виде.
Осуществление изобретения
На фиг.1 показана сельхозмашина 1, выполненная в виде зерноуборочного комбайна 2, в процессе уборки растительности 4 на подлежащей уборке территории 3. Известным образом зерноуборочный комбайн 2 оснащен устройством 6 хранения убранной массы, выполненным в виде зернового бункера 5 для приема зерна, и разгрузочным устройством 7, с помощью которого производится опорожнение зернового бункера 5. Спереди на комбайне 2 предусмотрено устройство 8 детектирования кромки растительности, определяющее кромку 9 растительности 4. Это устройство 8 детектирования кромки растительности может быть выполнено в виде так называемого лазерного датчика, сканирующий лазерный луч 10 которого генерирует данные положения кромки 9 растительности в блоке 11 обработки, в котором с учетом рабочей ширины 13 комбайна 2, определяемой шириной навесного рабочего аппарата 12, разрабатываются так называемые маршруты 14 системы 15 маршрутизации по изобретению, как это будет подробно описано далее.
Для опорожнения зернового бункера 5 комбайн работает в комплексе с погрузочным транспортным средством 16, причем для опорожнения бункера либо комбайн 2 подходит к погрузочному транспортному средству 16, либо наоборот, погрузочное транспортное средство 16 подходит к комбайну. Возможен также вариант осуществления, при котором комбайн 2 и погрузочное транспортное средство 16 оснащены антенной 17 системы GPS (Global Positioning System - глобальная система навигации и определения местоположения), которая известным образом передает на блок 11 обработки сигналы 19 системы GPS, генерируемые от спутниковых систем. При этом в блоке 11 обработки генерируются маршруты 14 системы 15 маршрутизации по изобретению, также с учетом рабочей ширины 13 комбайна 2. В рамках изобретения возможны установка и использование устройства 8 детектирования кромки растительности и системы 17-19 на основе системы GPS в сельхозмашинах 1 в любом их исполнении. В целях упрощения далее изобретение будет описано по существу применительно к комплексной системе зерноуборочного комбайна 2, при этом изобретение не ограничивается данным примером осуществления.
В соответствии с изобретением количество 20 убранной массы, принимаемое устройством 6 хранения убранной массы, должно быть подытожено в зависимости от так называемых характерных параметров, при этом подведение итога динамически адаптируется к изменениям одного или нескольких характерных параметров, как это будет более подробно описано далее. Характерные параметры подведения итога могут включать в себя характерные параметры 21 убранной массы, характерные параметры 22 поверхности уборки и/или характерные параметры 23 машины.
Как показано на фиг.2, комбайн 2 оснащен устройством 6 хранения убранной массы в виде зернового бункера 5, в который элеватором 24 подается зерновой поток 25. Этот зерновой поток 25 известным образом получают из потока 26 убранной массы, который проходит, как правило, через молотильные органы 27, сепарирующие органы 28 и очистные органы 29. Поток 26 убранной массы создается в результате уборки и сбора растительности 4 в жатвенном аппарате 31.
Далее, зерноуборочный комбайн 2 по фиг.2 оснащен уже описанными устройством 8 детектирования кромки растительности и системой 17 на основе системы GPS, которые известным образом генерируют сигналы 32 кромки растительности и маршрута. В целях упрощения обе системы 8, 17 представлены на одном и том же комбайне 2. Обычно комбайн может быть оснащен только одной из этих систем 8, 17. Генерируемые сигналы 32 кромки растительности и маршрута передаются на блок 11 обработки, расположенный, как правило, в кабине 33 водителя. Кроме того, зерновой бункер 5 снабжен известным устройством 34 детектирования степени заполнения, которое генерирует сигнал 35 степени заполнения зернового бункера и также передает его на блок 11 обработки.
В рамках изобретения возможен вариант выполнения, при котором устройство 34 детектирования степени заполнения зернового бункера выполнено в виде системы датчиков измерения расхода зерна, причем датчики расхода встроены как в элеваторе 24, так и в разгрузочном устройстве 7. В этом случае степень заполнения зернового бункера 5 определяется как разность между подводимым зерновым потоком 25 и зерновым потоком 36, который отводится из бункера разгрузочным устройством 7. Таким образом, в показанном примере осуществления устройство 34 детектирования степени заполнения содержит датчики 37 для определения количества 20 убранной массы, принимаемой зерновым бункером 5, при этом генерируемые устройством 34 сигналы 25, 35, 36 степени заполнения зернового бункера образуют характерные параметры 23 машины.
Наклонный питатель 38 комбайна 2, на котором установлен жатвенный аппарат 31, снабжен устройством 39 измерения расхода и влажности, которое само по себе известно и поэтому подробно не описывается. Это устройство 39 детектирует расход и влажность входящего в наклонный питатель 38 потока 26 убранной массы. Сигналы 40 расхода и влажности, генерируемые устройством 39, также передаются в блок 11 обработки и одновременно образуют характерные параметры 21 убранной массы. Однако возможно также, что характерным параметром 21 является вид убранной массы. В этом случае данная информация либо непосредственно вводится в блок 11 обработки оператором зерноуборочного комбайна 2, либо блок 11 обработки автоматически привлекает эту информацию из внешних источников данных. В рамках изобретения возможно также, что блок 11 обработки может иметь в своем распоряжении так называемые характерные параметры 22 поверхности уборки, такие как геометрия подлежащей обработке территории 3, маршруты 14, разработанные комбайном 2 или системой 15 маршрутизации, уклоны поверхности земли 41, а также расположение препятствий. В отношении характерных параметров 22 поверхности уборки возможно как их введение оператором комбайна 2, так и их привлечение из внешних источников. Кроме того, в рамках изобретения возможен вариант, когда из доступного набора параметров 21-23 блок 11 обработки учитывает только один выборочный параметр или комбинацию определенных параметров 21-23. Однако блок 11 обработки имеет, по меньшей мере, такую структуру, что кроме сигналов 25, 35, 36 заполнения зернового бункера он учитывает, по меньшей мере, один дополнительный характерный параметр 21-23 и по его корреляции с сигналами 25, 35, 36 заполнения зернового бункера генерирует, по меньшей мере, одну итоговую информацию 42 количества 20 убранной массы, принимаемой зерновым бункером 5. В простейшем случае итоговая информация 42 представляет собой прогноз относительно ожидаемого поступления убранной массы или определение так называемого положения опорожнения зернового бункера, как это будет подробно описано далее, в котором количество 20 убранной массы разгружается из зернового бункера 5 с помощью разгрузочного устройства 7. Для лучшего визуального представления генерируемой итоговой информации 42 блок 11 обработки дополнительно снабжен индикаторным блоком 43.
На фиг.3 подробно показана система 15 маршрутизации, при этом в целях упрощения изобретение будет описано по существу со ссылкой на индикаторное устройство 43, представленное в увеличенном виде. На индикаторном устройстве 43 зерноуборочный комбайн 2 находится в растительности 4 в процессе рабочего прохода уборки, причем выравнивание положения комбайна относительно кромки 9 растительности может производиться либо посредством устройства 8 детектирования кромки растительности, либо с помощью антенной 17 системы GPS. В зависимости от сигналов 32 маршрута в блоке 11 обработки генерируется первый участок 44 пути, в данном примере выполнения показанный на индикаторном устройстве 43 штрихпунктирной линией. Для этого участка пути характерно то свойство, что он представляет участок, уже пройденный комбайном 2 при уборке. Уже описанным образом соответствующие системы генерируют, по меньшей мере, один сигнал 35 степени заполнения зернового бункера, из которого в блоке 11 обработки генерируется итоговая информация 42 количества 20 убранной массы. В данном случае итоговая информация 42 включает в себя положение пункта 45 опорожнения зернового бункера на подлежащей обработке территории 3. На индикаторном устройстве 43 путь до этого пункта 45 опорожнения визуально представлен уже пройденным участком 46 пути, изображенным сплошной линией. Тот участок маршрута 14, который должен быть пройден после пункта 45 опорожнения зернового бункера, может быть представлен, например, штриховой линией, так что характеристика этого дальнейшего участка 47 пути также видна по графическому представлению. Процесс перегрузки для опорожнения зернового бункера 5, как правило, выполняется таким образом, что либо погрузочное транспортное средство 16 идет к комбайну 2, либо он идет к погрузочному транспортному средству 16. Поэтому необходимо обеспечить возможность того, чтобы погрузочное транспортное средство 16 либо могло сопровождать комбайн 2, либо было установлено в таком положении, чтобы комбайн 2 мог подойти к нему для перегрузки. В соответствии с изобретением это обеспечивается за счет того, что при генерировании итоговой информации 42 количества 20 убранной массы учитывается, по меньшей мере, один характерный параметр 22 поверхности уборки. В данном случае это может быть, например, требуемый остаточный участок 48 пути, который необходим для полного опорожнения зернового бункера 5 при движущемся комбайне 2 и на котором погрузочное транспортное средство 16 не встретит препятствий и не достигнет кромки растительности 4 или края территории 3. За счет этого достигается непрерывный процесс опорожнения зернового бункера, снижающий или почти полностью устраняющий непродуктивные простои зерноуборочного комбайна 2 на процесс перегрузки. В рамках изобретения предусмотрена возможность динамической адаптации положения пункта 45 опорожнения, а вместе с тем и содержания генерируемой информации 42 к изменяющимся сигналам 35 степени заполнения зернового бункера и характерным параметрам 21-23 убранной массы, поверхности уборки и машины. Другими словами, положение пункта 45 опорожнения может динамически смещаться по стрелке 49, так что положение генерируемых участков 46, 47 пути может динамически изменяться.
В одном из примеров осуществления изобретения дополнительно к определению пункта 45 опорожнения или вместо него может определяться момент 51 времени опорожнения с его визуальным представлением на индикаторном устройстве 43. В простейшем случае момент 51 времени опорожнения определяется посредством вычисления в блоке 11 обработки по скорости движения комбайна 2 и увеличении количества 20 убранной массы в зерновом бункере 5. По мере возрастания количества 20 убранной массы в зерновом бункере 5 указываемый момент 51 времени опорожнения отсчитывается с убыванием к нулю.
Кроме того, в рамках изобретения может быть предусмотрено, что так называемый остаточный участок 48 пути, требуемый для прохода комбайна 2 с опорожнением бункера, указывается цифрами в окне 52. В простейшем случае блок 11 обработки определяет длину остаточного участка 48 пути по скорости движения комбайна 2, количеству 20 убранной массы в зерновом бункере 5 и скорости подачи разгрузочного устройства 7. Эта величина также динамически адаптируется к мгновенной степени заполнения зернового бункера 5.
Далее, в рамках изобретения возможно альтернативное или совместное указание на индикаторном устройстве 43 остаточного участка 48 пути, момента 51 времени опорожнения и пункта 45 опорожнения. Поскольку определение пункта 45 опорожнения, как и момента 51 времени опорожнения и остаточного участка 48 пути, привязано к степени заполнения зернового бункера 5, вначале блок 11 обработки прогнозирует степень заполнения «зерновой бункер заполнен» на основе величины поступления зерна. Это прогнозирование осуществляется известным образом из скорости движения комбайна 2, его рабочей ширины 13 и зернового потока 25, транспортируемого в зерновой бункер 5 в единицу времени. В зависимости от дополнительного зернового потока 25, подаваемого в зерновой бункер 5, и разгружаемого из него зернового потока 36 в заключение блок 11 производит подведение итога, генерируя актуализированные величины пункта 45 опорожнения, момента 51 времени опорожнения и остаточного участка 48 пути.
Оптимальный процесс опорожнения зернового бункера в особенности характеризуется тем, что растительность 4 убирается непрерывно, а вовлеченные в процесс уборки системы машин как можно меньше проходят по территории, подлежащей обработке, в целях бережного обращения с почвой. Поэтому система 15 маршрутизации по изобретению дополнительно может быть выполнена таким образом, что блок 11 обработки определяет стратегию опорожнения зернового бункера, по меньшей мере, с учетом степени заполнения бункера 5, установленного пункта 45 опорожнения, положения, по меньшей мере, одного погрузочного транспортного средства 16 и выработанного маршрута 14, причем эта стратегия адаптируется, по меньшей мере, к одному из этих параметров в зависимости от остальных параметров. Особенное преимущество такого решения заключается в том, что система 15 маршрутизации учитывает все факторы влияния на цепочку процесса уборки.
Кроме того, подытоживание в соответствии с изобретением может осуществляться таким образом, что генерируемая итоговая информация 42 включает в себя ожидаемое количество убранной массы в растительности 4 и требуемую для него вместимость погрузочных транспортных средств 16. В представленном примере это может осуществляться следующим образом. На одной территории используются несколько зерноуборочных комбайнов 2, а производительность опорожнения и продолжительность пребывания погрузочного транспортного средства 16 учитывается для одного комбайна 2, зерновой бункер которого должен быть опорожнен в первую очередь. За счет этого для множества комбайнов 2, работающих на одной территории 3, обеспечивается распределение средств или мощностей опорожнения таким образом, что устраняются простои комбайнов 2 и положения, труднодоступные или недоступные для опорожнения зерновых бункеров. Это так называемое подытоживание продолжительности пребывания может дополнительно учитывать критерий оптимизации. Как уже было описано, критерий оптимизации может представлять собой «короткий проход погрузочного транспортного средства 16 по территории 3, подлежащей обработке» и/или «оптимальное заполнение погрузочного транспортного средства 16» и/или «приоритетный выбор сельхозмашины 1 для подхода».
Как показано на фиг.3, в процессе уборки могут быть заняты множество зерноуборочных комбайнов 2 и погрузочных транспортных средств, при этом в рамках изобретения предусмотрено, что в технологическую цепочку процесса могут быть включены другие сельхозмашины 1. За счет того что каждый комбайн 2 и каждое погрузочное транспортное средство 16 снабжено собственным индикаторным устройством 43, а каждый из блоков 11 обработки находится в контакте с другими блоками через посредство центрального блока 50, которое расположено либо на одной из занятых в процессе машин 1, 2, 16, либо стационарно в центре управления, управление одним или несколькими погрузочными транспортными средствами 16 может производиться автоматически в зависимости от одного или нескольких пунктов 45 опорожнения. Это взаимно скоординированное перемещение погрузочных транспортных средств 16 и комбайнов 2 на подлежащей обработке территории 3 может быть еще дополнительно оптимизировано за счет того, что каждый блок 11 обработки может быть снабжен индикаторным устройством 43, на котором указываются также остальные машины 1, 2, 16, связанные между собой системой 15 маршрутизации по изобретению.
Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации описанной системы 15 маршрутизации, не выходящие за пределы объема защиты, а также использование его в других машинах для получения описанных преимуществ.
Реферат
Изобретение относится к системе маршрутизации для сельхозмашин с учетом изменяющихся внешних условий. К сельхозмашине привязана определенная рабочая ширина для генерирования маршрутов на территории. Сельхозмашина содержит устройство хранения для приема убранной массы, которая может перегружаться на погрузочное транспортное средство. Принимаемое устройством хранения количество убранной массы подытоживается в зависимости, по меньшей мере, от одного характерного параметра. Подведение итога является динамически адаптируемым к изменениям, по меньшей мере, одного характерного параметра. Количества убранной массы в устройстве хранения воспринимаются датчиками. Генерируемые этими датчиками сигналы характерных параметров убранной массы коррелируются в блоке обработки, по меньшей мере, с одним характерным параметром, предоставленным блоком обработки. Блок обработки генерирует информацию, подытоживающую количества убранной массы. Итоговая информация о количестве убранной массы включает остаточный участок пути, на котором убранная масса транспортируется из устройства хранения убранной массы. Система маршрутизации обладает гибкостью и возможностью адаптации к изменяющимся условиям. 17 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ эксплуатации комбайна и устройство для его осуществления
Комментарии