Система автопилота, компоненты и способы - RU2652685C2
Код документа: RU2652685C2
Чертежи












Описание
Область техники, к которой относится изобретение
Настоящая заявка, в общем, относится к системам управления полетом и, более конкретно, к автопилоту винтокрылого летательного аппарата и соответствующим способам.
Уровень техники
Вертолет, по своей сути, является нестабильным и, в общем, требует, чтобы пилот поддерживал постоянное взаимодействие с управлением циклическим шагом, используя одну руку. Даже мгновенный выпуск управления циклическим шагом может привести к "переворачиванию" управления циклическим шагом или рычага управления, в результате чего, происходит потеря управления вертолетом. Это особенно неудобно, когда пилот должен вмешиваться в действия, выполняемые без использования рук, такие как, например, регулировка головной гарнитуры или сверка с бумажной картой. Кроме того, необходимость постоянного управления циклическим шагом может привести к усталости пилота.
Традиционные автопилоты могут обеспечить преимущества, которые включают в себя обеспечение возможности для пилота не выполнять управление циклическим шагом для вмешательства в задачи, выполняемые без использования рук, а также для снижения усталости пилота. Заявители, однако, понимают, что стоимость традиционного автопилота вертолета может стать препятствием. Например, стоимость может быть настолько существенной, по сравнению со стоимостью самого вертолета, что автопилоты редко используются на легких вертолетах.
Представленные выше примеры предшествующего уровня техники и ограничений, относящихся к ним, предназначены для иллюстрации, а не для исключения. Другие ограничения предшествующего уровня техники будут понятны для специалиста в данной области техники после чтения описания и изучения чертежей.
Раскрытие изобретения
Следующие варианты осуществления и их аспекты описаны и представлены совместно с системами, инструментами и способами, которые считаются примерными и иллюстративными, а не ограничивающими объем. В различных вариантах осуществления, одна или больше из упомянутых выше проблем были рассмотрены для их уменьшения или устранения, в то время как другие варианты осуществления направлены на другие улучшения.
В общем, описаны система автопилота для соответствующих компонентов вертолета и способы. В одном аспекте раскрытия и как часть такого автопилота для обеспечения автоматического управления вертолетом путем использования одного или больше элементов управления полетом выполнено устройство привода, которое включает в себя установленную с резервированием пару из первого и второго электродвигателей, каждый из которых включает в себя вращающийся выходной вал электродвигателя. Компоновка зубчатой передачи включает в себя выходной вал привода для оперативного соединения с элементом управления полетом, и выполнена с возможностью соединения выходного вала каждого одного из первого и второго электродвигателей для работы, по меньшей мере, в (i) первом режиме, в котором оба первый и второй электродвигатели способствуют вращению выходного вала привода, (ii) второго режима, в котором первый электродвигатель вращает выходной вал привода, из-за отказа второго электродвигателя и в (iii) третьем режиме, в котором второй электродвигатель вращает выходной вал из-за отказа первого электродвигателя.
В другом аспекте раскрытия модуль дисплея автопилота установлен на инструментальной консоли вертолета, по меньшей мере, для отображения полетных данных автопилота для пилота вертолета. Кожух основного модуля автопилота установлен с возможностью съема на вертолете рядом с управлением циклическим шагом вертолета, и который определяет внутреннее пространство основного модуля. Набор элементов привода установлен внутри внутреннего пространства основного модуля, включающего в себя элемент привода тангажа, имеющий выходной вал привода тангажа, и элемент привода крена, имеющий выходной вал привода крена таким образом, что кроме вала привода тангажа и вала привода крена набора элементов привода, ничто больше не выступает, по меньшей мере, частично, за пределы кожуха основного модуля автопилота для передачи сил механического управления на управление циклическим шагом вертолета. Электронный модуль основного модуля установлен внутри внутреннего пространства основного модуля и электрически соединен с модулем дисплея автопилота и с набором приводов для предоставления электрических сигналов управления к элементам привода таким образом, что электронный модуль основного модуля и набор элементов привода обычно расположены во внутреннем пространстве основного модуля.
В еще одном другом аспекте раскрытия система автопилота выполнена с возможностью автоматического управления вертолетом путем активации управления циклическим шагом вертолета, и на такое управление циклическим шагом воздействует частота циклической вибрации, связанная с вращением ротора вертолета. Изолятор циклической вибрации дистанционно удерживается с помощью вала элемента привода для одновременного вращения с ним и соединен с управлением циклическим шагом вертолета для передачи резонансной частоты, которая, по меньшей мере, приблизительно соответствуют частоте циклической вибрации, для движения управления циклическим шагом относительно вала привода таким образом, что частота циклической вибрации затухает на валу привода, и выходное вращение вала привода, которое ниже резонансной частоты, передают от управления циклическим шагом.
В еще одном аспекте раскрытия система автопилота выполнена с возможностью автоматического управления вертолетом путем активации управления циклическим шагом вертолета, и на такое управление циклическим шагом воздействует циклическая вибрация, в соответствии с вращением ротора вертолета. Изолятор циклической вибрации включает в себя рычаг управления, который съемно закреплен на валу элемент привода, для поддержания изолятора циклической вибрации таким образом, что рычаг управления одновременно вращается с валом элемента привода. Выходной рычаг соединен с управлением циклическим шагом вертолета, и поэтому на него воздействует циклическая вибрация. Упругая компоновка установлена между рычагом управления и выходным рычагом таким образом, что выходной рычаг колеблется в соответствии с циклической вибрацией и относительно рычага управления, механически изолируя вал элемента привода от циклической вибрации, в то время как он передает вращательные движения привода вала элемента привода на выходной рычаг, передавая, таким образом, вращательные движения привода на управление циклическим шагом для привода автопилота управления циклическим шагом.
В следующем аспекте раскрытия система автопилота выполнена с возможностью автоматического управления вертолетом путем привода элемента привода, имеющего вал привода, для привода управления циклическим шагом вертолета. Как часть автопилота, соединение с ограничением силы включает в себя первый конец, второй конец и переменную длину между ними, ориентированную вдоль удлиненной оси, при этом первый конец соединен с валом элемента привода и второй конец соединен с управлением циклическим шагом. Соединение с ограничением силы, имеющее длину в свободном состоянии как переменную длину между первым и вторым концами, когда менее чем сила страгивания приложена к первому и второму концам вдоль удлиненной оси, для обеспечения соответствующего движения управления циклическим шагом, в ответ на движение элемента привода, и выполнено таким образом, что переменная длина изменяется от длины в свободном состоянии, в зависимости от внешней силы, которая прикладывается к первому и второму концам вдоль удлиненной оси, которая равна или больше, чем сила страгивания, для обеспечения для пилота возможности преодоления действия автоматического управления циклическим шагом, выполняемого элементом привода.
В дополнительном аспекте раскрытия система автопилота выполнена с возможностью автоматического управления вертолетом, подавая электрические сигналы команды в элемент привода для активации управления циклическим шагом вертолета, и на такое управление циклическим шагом воздействует циклическая вибрации, в соответствии с вращением ротора вертолета. Соединения автопилота включают в себя соединение с ограничением силы для обеспечения возможности преодоление действия автоматического управления пилотом управления циклическим шагом, выполняемого элементом привода. Соединение с ограничением силы, имеющее первый конец, второй конец и переменную длину между ними, ориентированную вдоль оси удлинения, и первый конец соединен с управлением циклическим шагом. Соединение с ограничением силы, имеющее длину в свободном состоянии и переменную длину между первым и вторым концами, когда меньше, чем сила страгивания прикладывается к первому и второму концам вдоль оси удлинения, для обеспечения соответствующего движения второго конца с первым концом, и выполненное таким образом, что переменная длина изменяется от длины в свободном состоянии, в соответствии с внешней силой, которая прикладывается к первому и второму концам вдоль оси удлинения, которая равна или больше, чем сила страгивания, для преодоления пилотом действия автоматического управления. Изолятор циклической вибрации съемно удерживается валом элемента привода для совместного вращения с ним и соединен со вторым концом соединения с ограничением силы таким образом, что циклическая вибрация передается на изолятор циклической вибрации через соединение с ограничением силы, и изолятор циклический вибрации выполнен так, что он прикладывает резонансную частоту, которая, по меньшей мере, приблизительно соответствует частоте циклической вибрации при циклической вибрации, для обеспечения движения второго конца связи с ограничением силы относительно вала привода на частоте циклической вибрации, изолируя при этом вал привода от частоты циклической вибрации, и для передачи выходного вращения вала привода ниже резонансной частоты на соединение с ограничением силы для передачи в управление циклическим шагом.
Краткое описание чертежей
Варианты осуществления иллюстрируются на ссылочных фигурах чертежей. Предполагается, что варианты осуществления и фигуры, раскрытые здесь, являются, скорее, иллюстративными, чем ограничительными.
На фиг. 1 схематично показан вид в перспективе части вертолета, включающей в себя компоненты автопилота в соответствии с настоящим раскрытием.
На фиг. 2 схематично показан вид сверху в перспективе части вертолета по фиг. 1, представленной здесь для дополнительной иллюстрации деталей компонентов системы автопилота.
На фиг. 3 схематично показан вид в перспективе части варианта осуществления элемента привода и варианта осуществления соединения с ограничением силы, которые могут использоваться как компоненты автопилота настоящего раскрытия.
На фиг. 4 схематично показан вид в перспективе варианта осуществления компоновки привода с зубчатой передачей, которая может формировать часть элемента привода по фиг. 3 вместе с парой резервирующих друг друга электродвигателей привода элемента привода.
На фиг. 5 показана блок-схема, которая иллюстрирует вариант осуществления автопилота в соответствии с настоящим раскрытием.
На фиг. 6 и 7 показаны схемы в виде в перспективе варианта осуществления ограждения кожуха основного модуля и соответствующие компоненты.
На фиг. 8 показан другой схематичный вид в перспективе кожуха основного модуля по фиг. 7 и 8, представленный здесь для дополнительной иллюстрации его структуры.
На фиг. 9 и 10 схематично показан вид в разных перспективах, представляющий кожух основного модуля и соединения элементов привода в установленном положении относительно управления циклическим шагом вертолета.
На фиг. 11 показан вид в перспективе, в собранном состоянии варианта осуществления изолятора циклической вибрации в соответствии с настоящим раскрытием.
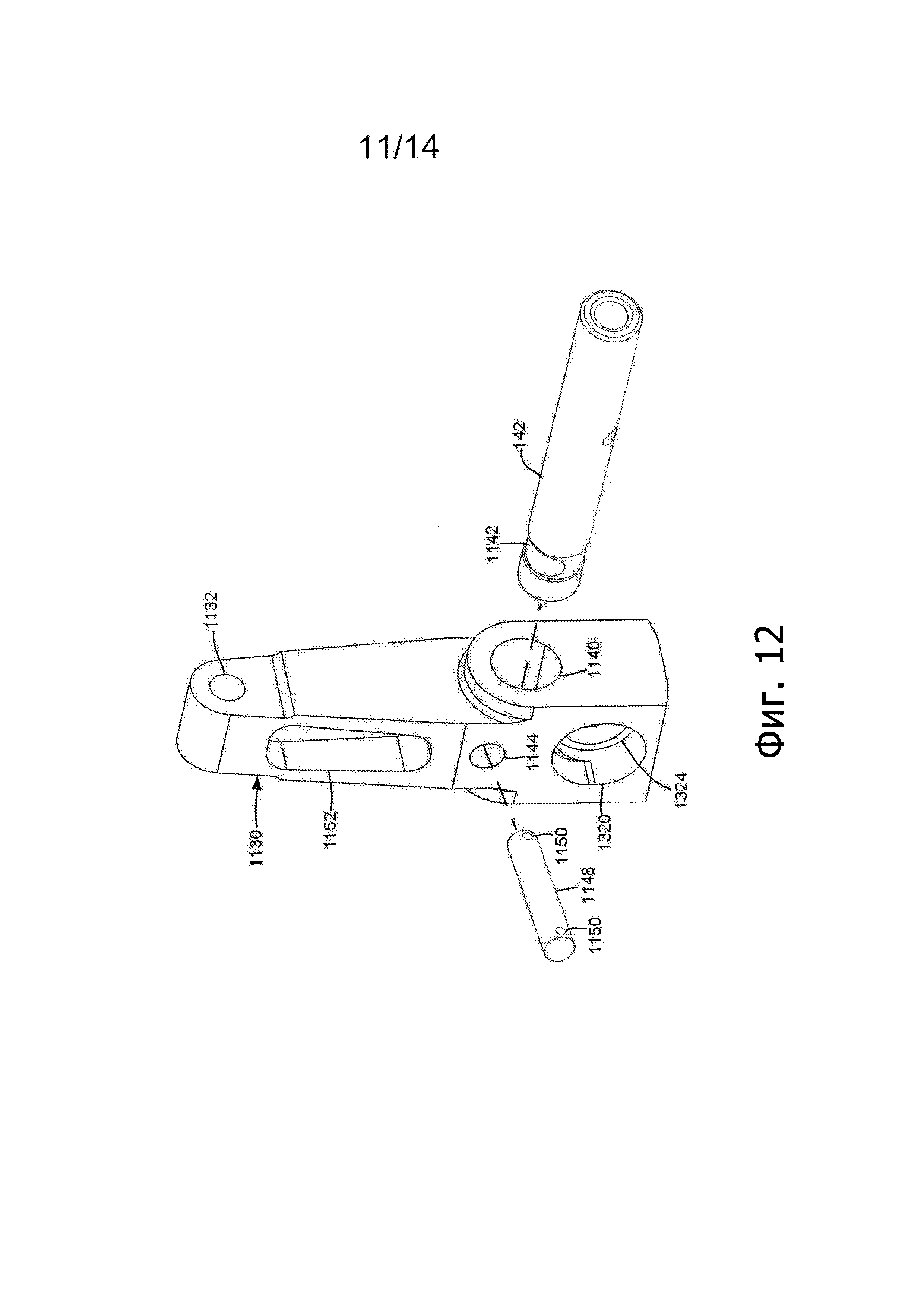
На фиг. 12 схематично показан вид в перспективе рычага управления, который формирует часть изолятора вибрации по фиг. 11.
На фиг. 13 схематично показан частичный вид в перспективе изолятора вибрации по фиг. 11, представленный таким образом, что раскрываются дополнительные детали его внутренней структуры.
На фиг. 14 показан схематичный вид в перспективе варианта осуществления соединения с ограничением силы в соответствии с настоящим раскрытием.
На фиг. 15 схематично показан вид в перспективе с покомпонентным представлением деталей соединения с ограничением силы по фиг. 14.
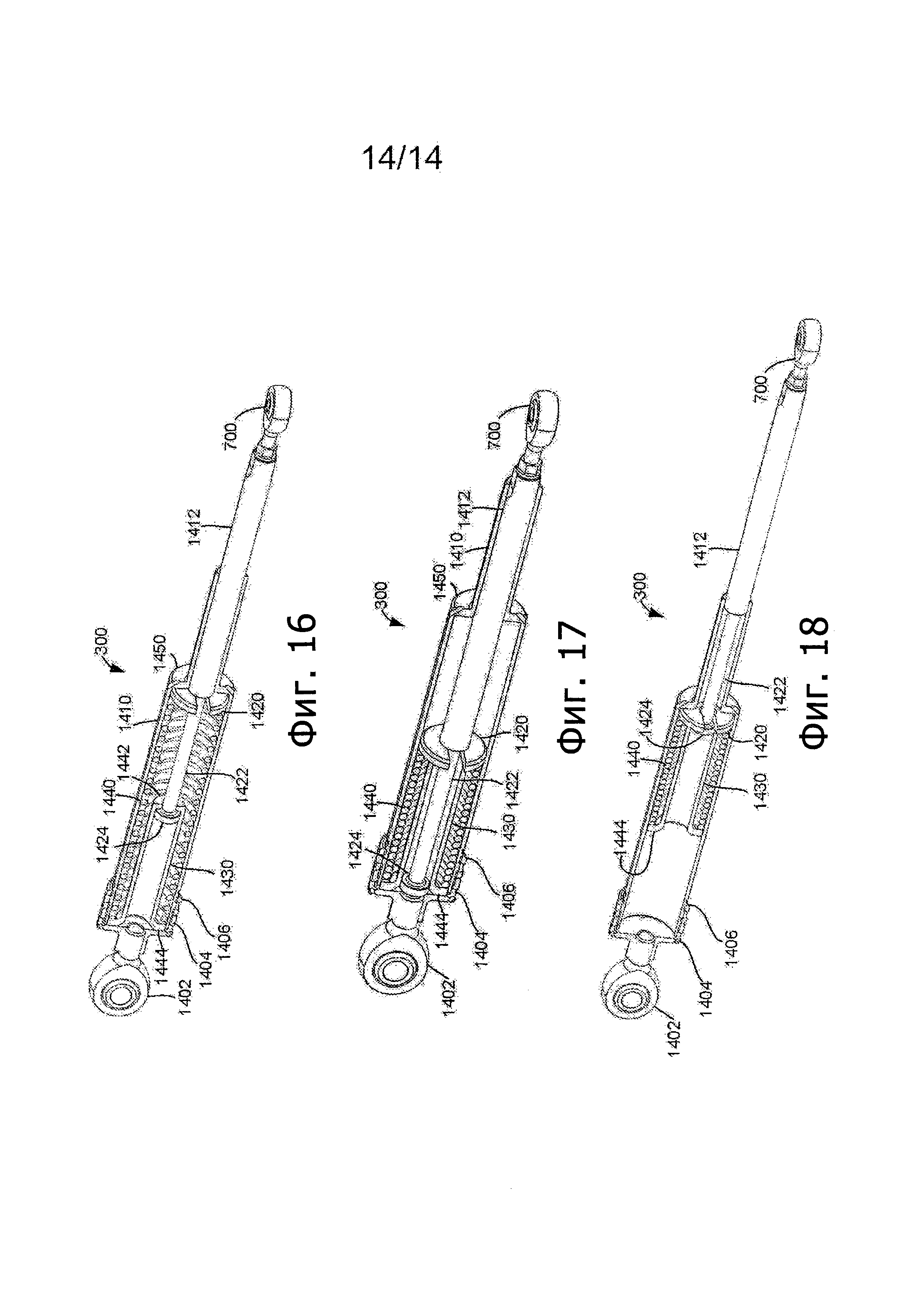
На фиг. 16-18 схематично показаны виды в перспективе с разрезами соединения с ограничением силы, представленного в виде в перспективе на фиг. 14 в свободном, сжатом и расширенном состояниях.
Осуществление изобретения
Следующее описание предназначено для обеспечения для специалиста в данной области техники возможности использовать изобретение и предоставлено в контексте патентной заявки и ее требований. Различные модификации описанных вариантов осуществления будут понятны для специалиста в данной области техники, и общие принципы, описанные здесь, могут применяться в других вариантах осуществления. Таким образом, настоящее изобретение не предназначено для его ограничения представленными вариантами осуществления, но должно соответствовать самому широкому объему, который соответствует принципам и свойствам, описанным здесь, включающим в себя модификации и эквиваленты. Следует отметить, что чертежи могут быть вычерчены не в масштабе и могут быть схематичными по своей сути, таким образом, чтобы можно было лучше иллюстрировать представляющие интерес свойства. Описательная терминология может использоваться с целью улучшения понимания читателя в отношении различных видов, представленных на чертежах, и при этом, никоим образом, не предполагается, что она является ограничительной.
На фиг. 1 показан частичный вид в перспективе вертолета 10, представленный здесь с целью иллюстрации различных компонентов варианта осуществления системы 12 автопилота для вертолета. Следует понимать, что большая часть физической структуры самого вертолета не видима на фиг. 1 с целью ясности представления, однако следует понимать, что эта структура присутствует. Автопилот в настоящем раскрытии является электромеханическим и может обеспечивать управление полетом вертолета, без необходимости использования гидравлической системы управления полетом. Вертолет может, в качестве неограничительного примера, представлять собой вертолет Robinson R22. Однако представленное здесь описание может быть легко адаптировано для использования с любым соответствующим вертолетом, доступным в настоящее время, или который будет разработан в будущем. Например, автопилот, в соответствии с настоящим раскрытием, может использоваться с вертолетами, имеющими гидравлическую вспомогательную систему управления циклическим шагом при работающей или не работающей гидравлической системе.
Вертолет 10 включает в себя ручку или рычаг 14 управления циклическим шагом, имеющий ручку управления или захват 18, который выполнен с возможностью его захвата рукой пилота. Как будет понятно для специалиста в данной области техники, рычаг 14 может перемещаться вперед и назад (в направлении к инструментальной консоли 20 и от нее), для управления тангажом вертолета и в поперечном направлении с целью управления креном вертолета скоординированным образом, для обеспечения управляемого полета. Дополнительные входные элементы управления предусмотрены для пилота через пару педалей для управления рысканьем вертолета, путем изменения шага хвостового винта. Следует отметить, что такие элементы системы управления рысканьем не были представлены с целью ясности иллюстрации, но следует понимать, что они присутствуют. В варианте осуществления пилот также сохраняет управление всем вертолетом, а также установками дроссельных заслонок. Автопилот в соответствии с настоящим раскрытием, однако, может осуществлять полное управление рычагом 14, перемещая рычаг в любом направлении до пределов его перемещения в соответствующих обстоятельствах. Рычаг 14 проходит ниже палубы 24 вертолета, и с ним соединены соединения управления тангажом и креном вертолета, как понятно для специалиста в данной области техники, с тем, чтобы управлять приводом циклического шага основного ротора вертолета. В частности, труба 25а крутящего момента передает усилие привода для управления креном, в то время как рычаг 25b управления передает усилие привода для управления тангажом. Термин "циклический" относится к изменению шага лопастей ротора вертолета в каждом обороте. В этом отношении управление циклическим шагом может относиться к манипуляциям рычагом, или сам рычаг может называться рычагом управления циклическим шагом. Модуль 28 процессора дисплея автопилота (ADPU) может быть установлен на инструментальной консоли 20 для обеспечения показаний для пилота, а также для обеспечения возможности обработки и для других целей. Следует отметить, что ADPU также показан с дополнительным увеличением на выделенном участке.
Элементы управления циклическим шагом 18, в частности, включают в себя узел 26 модуля переключателя, который может быть установлен так, как показано. Детали ручки 18 представлены с дополнительным увеличением на выделенном участке. Модуль переключателя может содержать переключатели, включающие в себя переключатель 29а включения/выключения и "расположенный сверху цилиндрический" переключатель 29b балансировки/режима (4-сторонний, в настоящем варианте осуществления). "Расположенный сверху цилиндрический" переключатель позволяет пилоту балансировать курс, скорость и высоту. В процессоре автопилота может быть предусмотрена возможность перерыва, которая предотвращает продолжение балансировки в случае неисправности переключателя или неисправности в проводах. Переключатель режима может выбирать и детектировать высоту, скорость режим
зависания или режим удержания положения, на основе текущего состояния полета.
Также, обращаясь к фиг. 1, в автопилоте 12 воплощено управление циклическим шагом через множество составляющих узлов, которые, соответствующим образом, расположены на вертолете. Основной модуль 30 автопилота расположен под основной палубой вертолета. В настоящем варианте осуществления основной модуль 30 включает в себя кожух 31 L-образной формы, в котором установлено электронное устройство, а также соединение 32a управления тангажом и соединение 32b управления креном, которые могут быть обозначены в общем или совместно номером 32 ссылочной позиции. Каждое из этих соединений включает в себя элемент привода, который расположен внутри кожуха основного модуля, как будет дополнительно описано ниже. Дистальный конец каждого из соединений соединен с самым нижним концом рычага 14, для воплощения того, что известно как система параллельного управления. В этом отношении следует понимать, что оригинальное соединение управления циклическим шагом вертолета 10 между рычагом 14 и ротором остается без нарушений. Таким образом, управление пилота вертолетом, также как автопилотом передают непосредственно на рычаг. Детали используемые для соединения управления тангажом и креном обеспечивают параллельную компоновку входного воздействия на управление. Система управления автопилота последовательного типа, в отличие от этого, требует разрыва оригинальных соединений управления циклическим шагом вертолета между рычагом и ротором таким образом, чтобы элементы привода автопилота могли быть вставлены в разрыв. Следует понимать, что представленные здесь описания могут быть непосредственно адаптированы для варианта осуществления с последовательным подводом управляющих воздействий.
Возвращаясь к фиг. 2, компоненты вертолета и автопилота представлены в виде сверху в перспективе. На этом виде элемент 60a привода тангажа и элемент 60b привода крена (которые могут быть в общем или совместно обозначены номером 60 ссылочной позиции) можно видеть в L-образном кожухе 31, крышка кожуха которого представлена прозрачной. Электронное средство 66 основного модуля расположено внутри кожуха и электрически соединено (не показаны) как снаружи, так и с элементами привода. Следует отметить, что дополнительные детали в отношении соответствующего варианта осуществления электронного средства 66 основного модуля были описаны в совместно находящейся на рассмотрении заявке, регистрационный №13/763,574 на патент США (регистрационный №патентного поверенного НТК-2), которая представлена здесь полностью по ссылке.
На фиг. 3 показан вариант осуществления элемента 60 привода, который может использоваться для элементов привода тангажом и креном в данном раскрытии, в виде в перспективе, установленный внутри кожуха 31, и подключенный к соединению 32 управления. Каждый элемент привода включает в себя корпус 82, имеющий компоновку зубчатой передачи, которая еще будет представлена, внутри кожуха, два электродвигателя: электродвигатель A и электродвигатель B, и компоновку 84 сцепления для избирательного подключения и отключения электродвигателей для вращения выходного вала, которая не видна с противоположной стороны корпуса 82. Последний может быть сформирован, например, из нержавеющей стали. Как можно видеть, компоновка зубчатой передачи обеспечивает возможность одновременного привода электродвигателей A и B выходного вала или любого одного из электродвигателей для индивидуального привода выходного вала. В настоящем варианте осуществления электродвигатели A и B представляют собой бесщеточные электродвигатели постоянного тока, имеющие Y-образную конфигурацию статора, которая требует скоординированной подачи входных сигналов для управления фазами электродвигателей в конкретной последовательности, как хорошо известно. Таким образом, электродвигатели не могут пойти в разнос под действием своей собственной мощности. Электродвигатели включают в себя датчики с эффектом Холла, которые используются с целью синхронизации электрических импульсов привода со статором электродвигателя. Дополнительные детали в отношении электродвигателей и их соответствующие описания привода представлены ниже в одном или больше соответствующих местах.
На фиг. 4 иллюстрируется вариант осуществления компоновки 100 зубчатой передачи, которая может использоваться в элементе привода на фиг. 3. Прежде всего следует отметить, что компоновка зубчатой передачи представляет собой многокаскадную понижающую передачу с коэффициентом понижения, например, приблизительно 1750:1. Кроме того, зубья не были представлены для ряда зубчатых колес, которые будут описаны ниже, но следует понимать, что они присутствуют. В других вариантах осуществления могут не требоваться зубчатые колеса с зубьями. Электродвигатели A и B имеют выходные валы 90a и 90b, соответственно, на которых установлены зубчатые колеса, которые соединены с зубчатым колесом 102 на первом валу 104. Противоположный конец вала 104 поддерживает меньшее зубчатое колесо 106, которое выполняет привод зубчатого колеса 110, который удерживается на втором валу 112, на котором также установлена меньшая зубчатая передача 114 (частично скрыта в виде на чертеже). Следует отметить, что вал 112 может содержать вал сцепления, который может перемещаться поперечно для избирательного соединения или разъединения электродвигателей привода с остающимися зубчатыми колесами зубчатой передачи. Соответствующая компоновка сцепления описана, например, в патенте США №7954614, который представлен здесь по ссылке. Компоновка сцепления основана на движении вала сцепления вдоль его удлиненной оси, используя постоянный магнит, который установлен на дистальном конце вала. Элемент 113 привода сцепления (фиг. 3) может избирательно перемещать (например, поворачивать) другой постоянный магнит относительно постоянного магнита, установленного на валу сцепления, таким образом, что вал сцепления смещается под действием магнитного поля, перемещаясь между соединенным положением и разъединенным положением. Вал сцепления остается в текущем рабочем положении, несмотря на отказ питания. Зубчатое колесо 114, в свою очередь, избирательно выполняет привод зубчатого колеса 120, которое установлено на третьем валу 122. На последний также установлено меньшее зубчатое колесо 124, которое выполняет привод зубчатого колеса 130, которое установлено на четвертном валу 132. На четвертом валу, в свою очередь, установлено меньшее зубчатое колесо 134, которое выполнено с возможностью вращения выходного зубчатого колеса 140, которое установлено на выходном валу 142 элемента привода. Выходное зубчатое колесо выполнено с возможностью обеспечения достаточного вращения для перемещения рычага 14 по его полному диапазону движения. В варианте осуществления элементы привода, в соответствии с настоящим раскрытием, выполнены достаточно надежными, с точки зрения генерируемого уровня силы привода таким образом, что они выполнены с возможностью управления циклическим шагом вертолета с гидравлической системой управления, в которой возник отказ. Например, элемент 60 привода выполнен с возможностью приложения сил, по меньшей мере, 100 фунтов к системе управления циклическим шагом. В то время как настоящий вариант осуществления разработан для предоставления силы привода на этом уровне, используя доступный крутящий момент вплоть до 200 дюймов на фунт, следует понимать, что в других вариантах осуществления может быть обеспечена значительно большая сила, например, в результате уменьшения длины рычага управления элемента привода. Как будет дополнительно описано, силы элемента привода прикладываются к нижней части управления циклическим шагом, в то время как силы пилота прикладываются к верхней части рычага управления циклическим шагом. В соответствии с этим для пилота обеспечивается механическое преимущество из-за разной длины плеча рычага. На вертолете R22 механическое преимущество, связанное с тем, что пилот находится сверху рычага управления по сравнению с нижней частью рычага управления, где закреплены элементы привода, составляет, примерно, 7:1. В таком случае приложенная элементом привода сила 100 фунтов эквивалентна приблизительно 14 фунтам приложенной пилотом силы. Аналогично в то время как элемент привода может генерировать очень большие силы, соединение с ограничением силы, которое описано ниже, обычно, не будет воплощено для передачи через себя силы такой величины в основание рычага управления циклическим шагом, однако может быть установлен вариант осуществления с гораздо более жестким соединением с ограничением силы, если это необходимо.
В одном варианте осуществления элемент привода может быть выполнен с передаточным числом приблизительно 1720:1, однако может быть найден соответствующий широкий диапазон других передаточных чисел. Следует понимать, что для передаточного числа 1720:1, один оборот электродвигателя поворачивает выходной вал элемента привода только приблизительно на 0,2 градуса. И само по себе такое разрешение может быть достаточным для отслеживания выходного положения элемента привода. Например, вращение вала электродвигателя можно детектировать, используя магнит, который установлен на валу, как понятно для специалиста в данной области техники. В варианте осуществления, как описано в указанном выше представленном здесь по ссылке Приложении регистрационный №13/763574 (регистрационный номер патентного поверенного НТК-2), данные датчика Холла от электродвигателей можно использовать для определения последовательного приращения положения выходного вала элемента привода каждого из элемента привода. В этом отношении каждый электродвигатель элемента привода включает в себя 3 датчика Холла. Импульсы датчика Холла могут действовать как счетчик повышающего/понижающего подсчета с последовательным приращением. Положение выходного вала относительно опорного местоположения можно постоянно отслеживать. Например, нулевое опорное местоположение выходного вала элемента привода может быть определено, когда элемент привода соединен через муфту 84. Такое отслеживание нулевого опорного положения можно использовать для определенных отказов, в котором, наилучший подход состоит в восстановлении рычагов/валов элемента привода в их усредненном положении перед отказом. Поскольку каждый электродвигатель включает в себя 3 датчика Холла и 4 полюса, существуют 12 изменений состояния Холла на оборот каждого электродвигателя. В частности, при отслеживании изменения состояния Холла, можно повысить разрешающую способность с коэффициентом 12 таким образом, что обеспечивается разрешающая способность приблизительно 0,017 градусов на выходном валу элемента привода. В варианте осуществления соответствующее движение в верхней части рычага На фиг. 1 может составлять приблизительно 0,0039 дюйма.
Общий отказ питания системы электрического питания вертолета может привести к преодолению действия автоматического управления элементов привода в определенном положении приблизительно на пять секунд, используя свойство динамического торможения, которое описано в представленной выше заявке US, регистрационный №13/763574 (регистрационный №патентного поверенного НТК-2). Для пилота обычно больше чем достаточно периода времени пять секунд, чтобы принять на себя управление. В этом отношении нормативные требования устанавливают период времени только три секунды. В этом отношении автопилот не позволяет перевернуться рычагу системы управления циклическим шагом при высвобождении управления при отказе электропитания. Даже когда оба элемента привода будут блокированы, пилот все еще может выполнять управление вертолетом, поскольку происходит преодоление действия автоматического управления через соединения 300a с ограничением силы (для тангажа, как показано на фиг. 1) и 300b (для крена, как показано на фиг. 1 и 2) между каждым элементом привода и рычагом системы управления циклическим шагом. Эти соединения являются жесткими для сил ниже значения страгивания и соответствуют большим силам, что позволяет пилоту безопасно маневрировать и посадить вертолет, даже если нельзя выполнить отсоединение системы. Эмпирически было продемонстрировано, что пилот может управлять вертолетом, включая в себя зависание на одном месте и посадку, с обоими элементами привода, в состоянии, которое называется состоянием "преодоления действия автоматического управления". Преодоление действия состояния автоматического управления обеспечивается в результате закорачивания всех обмоток электродвигателей элемента привода и используется в варианте осуществления динамического торможения, описанном выше. Преодоление действия автоматического управления соединений подробно описано ниже и может относиться взаимозаменяемо к соединениям с ограничением силы. В вертолете, в котором не используется гидравлический интерфейс для системы управления циклическим шагом, изоляторы циклической вибрации 302a (тангажа) и 302b (крена) могут быть установлены на выходном валу каждого элемента привода. Изоляторы вибрации могут быть необязательными при использовании в вертолете, в котором установлена дополнительная гидравлическая система управления циклическим шагом, поскольку гидравлическая система, в общем, обеспечивает демпфирование циклических колебаний. Изоляторы вибрации уменьшают два колебательных движения на оборот, которые присутствуют в соединении управления винтокрылым устройством R22 и в других легких вертолетах, для предотвращения вибрационных нагрузок при управлении винтокрылым летательным устройством для увеличения срока службы, уменьшая усталость компонентов привода. Изоляторы циклической вибрации подробно описаны ниже.
Подробно описанные выше механические компоненты автопилота теперь соответствуют описанию автопилота с точки зрения взаимного соединения между описанными выше компонентами и соответствующими электронными элементами управления. В частности, на фиг. 5 показана блок-схема варианта осуществления автопилота 12. В этом отношении основной модуль 30, содержащий ограждение 31, исполнительные элементы 60 крена и тангажа, и электронное устройство 66 могут упоминаться ниже как модуль процессора управления электродвигателем (MCPU) или основной модуль 30 автопилота. MCPU включает в себя три микропроцессора, каждый из которых может называться процессором управления электродвигателем (MCP). Существуют три MCP, индивидуально обозначенные как MCP A, MCP B и MCP C. Каждый из этих модулей процессора может обращаться к комплекту датчиков, состоящему из трехосевых датчиков скорости MEM и трехосевых акселерометров MEM. MCP используются для обеспечения внутреннего контура общей системы управления, имеющей внутренний контур управления и внешний контур управления. MCP обеспечивает передачу команд в бесщеточный электродвигатель постоянного тока. Электродвигатель A и электродвигатель B элемента 60a привода тангажа и элемента 60b привода крена выполняют привод системы управления для вертолета. Обмен данными между процессорами может выполняться через последовательную шину, которая поставляется вместе с каждым из процессоров. Целостность данных может быть защищена, например, путем использования проверки циклической избыточности (CRC), встроенной в поток данных.
Федеральное управление авиации (FFA) сертифицирует программное обеспечение системы летательных аппаратов в соответствии с версией DO 178. Во время написания данной заявки была выпущена версия DO-178C. В этом документе установлены Уровни конструктивной надежности (DAL) на основе критичности отказа программного обеспечения в данной системе. Например, DAL A обозначен как "катастрофический" и назначается, когда отказ может привести к катастрофе. В другом примере, DAL C разработан как "основной", и его назначают, когда отказ является существенным и может привести к дискомфорту пассажира или повышенной нагрузке на экипаж. Каждый из трех MCP может выполнять идентичное программное обеспечение DAL A, так, чтобы составить систему с тройным резервированием. Процессоры управления электродвигателем взаимно соединены так, что они могут выполнять обмен данными. Каждый процессор считывает свой набор датчиков и сравнивает их данные с данными датчиков, поступающими из других двух процессоров, с целью последовательности, и каждый процессор управления электродвигателем рассчитывает средние значения всех соответствующих датчиков для использования с целью дальнейшей обработки. В другом варианте осуществления могут быть определены срединные значения, в отличие от средних значений. Данные датчика, определенные как ошибочные, устраняют из усреднения. Сигнал предупреждения в виде звукового и/или светового сигнала может быть передан в модуль 28 процессора дисплея автопилота (ADPU) на приборной панели 20 (фиг. 1). Тактильную обратную связь, такую как, например, сотрясение рычага можно использовать отдельно или в комбинации с другими показаниями предупреждения. В варианте осуществления световые сигналы статуса лучше всего видны в увеличенном отдельном виде ADPU на фиг. 1, и включает в себя зеленый (нормальный), желтый (предупреждение)) и красный (критический отказ), а также два рупора предупреждения, которые обеспечивают показания о статусе системы. Рупоры предупреждения также обеспечивают уведомления о статусе системы и подают сигналы тревоги вместе со световыми сигналами статуса. Как световые сигналы статуса, так и рупоры непосредственно связаны через интерфейс MCP. В некоторых вариантах осуществления звуковые сигналы и/или сигналы предупреждения могут быть переданы через аудиосистему вертолета таким образом, чтобы уведомления можно было слышать через головную гарнитуру пилота, а также, чтобы их можно было использовать вместо рупора. Световые сигналы статуса и сигналы рупора дополняют дисплей, на которой представлены текущие установки системы автопилота, такие как состояние соединения, дорожка, скорректированное направление гироскопа, высота, скорость относительно земли и любые предупреждающие сообщения. Также на панели предусмотрена кнопка тестирования, которая инициирует инициируемый встроенный тест (IBIT).
MCP также считывают данные датчика Холла из электродвигателей привода, которые могут использоваться для обозначения текущего положения каждого элемента привода, и сигнал управления, поступающий из процессора дисплея автопилота (ADP), который формирует часть ADPU. В этом отношении ADPU используется как внешний контур управления для обеспечения сигналов команды для внутреннего контура. Используя все эти данные, каждый MCP рассчитывает сигнал управления электродвигателем для электродвигателей в отношении PWM (широтно-импульсная модуляция) и направления вращения. В каждом процессоре также используются данные датчика Холла для управления силовым соединением с ротором бесщеточного электродвигателя, назначенного для него. Каждый MCP сравнивает свой сигнал команды PWM и направление вращения для элементов привода тангажа и крена, при этом команды генерируются другими двумя MCP по соглашению. Поскольку все процессоры используют одни и те же данные для расчета сигналов управления электродвигателем, они должны производить идентичные выходные сигналы. Сигналы для согласия/несогласия с другими двумя процессорами передают в блок 200 голосования, вариант осуществления которого подробно представлен в указанной выше публикации US, регистрационный №13/763,574 (регистрационный номер патентного поверенного НТК-2), но работа которого описана более подробно ниже с целью полноты. В дополнение к обработке голосования/арбитража, блок 200 блок также используется как сквозной блок для данных датчика Холла от каждого из электродвигателей в соответствующий один из MCP. Как описано выше, показатели датчика Холла используются для генерирования сигналов управления электродвигателем для бесщеточных электродвигателей DC и могут использоваться для обеспечения показаний с высокой разрешающей способностью положения выходного вала элемента привода.
Как описано выше, каждый элемент привода включает в себя электродвигатель A и электродвигатель B. Каждым отдельным электродвигателем управляет один MCP. Таким образом, только MCP A и MCP B управляют электродвигателями. В частности, MCP A управляет электродвигателем А в каждом из элемента привода 60a тангажа и элемента привода 60b крена, в то время как MCP B управляет электродвигателем B в каждом из элемента привода 60a тангажа и элемента 60b привода крена. MCP C (третий процессор) не управляет электродвигателем, но выполняет все расчеты для генерирования команд для рычага управления, как если бы он управлял электродвигателем. В этом отношении третий электродвигатель может быть непосредственно добавлен к каждому элементу привода (см. фиг. 4), который мог бы зацепляться с зубчатым колесом 102 таким же образом, как и электродвигатель А, и электродвигатель В, но под управлением MCP C. Последний, однако, подключается таким образом, что он идентичен двум другим процессорам. Например, если MCP A и MCP C согласны в отношении управления электродвигателем тангажа, но MCP B не согласен, тогда MCP B по голосованию будет исключен из управления его электродвигателем тангажа, MCP B продолжит управление своим электродвигателем тангажа до тех пор, пока MCP A и MCP C также не исключат его по голосованию из управления этим электродвигателем. С другой стороны, если MCP C будет исключен по голосованию, это не повлияет на электродвигатели привода, но предупреждающий световой сигнал и рупор могут быть активированы, как, например, в случае MCP, который управляет электродвигателями.
Элементы привода разработаны таким образом, что любой один из электродвигателя A или электродвигателя B независимо выполнен с возможностью привода элемента привода, для управления вертолетом. Выходной вал электродвигателя, в котором произошел отказ, будет вращаться оставшимся электродвигателем. Если один из MCP A или MCP B будет исключен по голосованию, автопилот может продолжить свою функцию, несмотря на тот факт, что каждый из этих MCP управляет электродвигателями. Как упомянуто выше, могут использоваться световые сигналы предупреждения и краткие звуковые сигналы рупора для уведомления пилота о том, что возникла некритичная неисправность автопилота.
MCP обладают полными полномочиями в отношении элементами управления и ограничены по скорости соответствующим значением, таким как, например, 5 дюймов в секунду. Блок управления MCP представляет собой единственный участок автопилота, который может приводить к критической или основной неисправности, приводящей к риску. В соответствии с этим MCPU разработан как блок с тройным резервированием, при этом DAL A представляет собой специализированное программное обеспечение, предназначенное для обеспечения работы внутреннего контура автопилота. Эти факторы существенно уменьшают вероятность критического отказа. Однако заявители понимают, что программное обеспечение, соответствующее внешнему контуру, может быть отделено от программного обеспечения внутреннего контура таким образом, что обеспечивается возможность обозначения программного обеспечения внешнего контура при более низкой сертификации DAL C.
Программное обеспечение внешнего контура обрабатывается процессором дисплея автопилота (ADP) в ADPU 28. MCP преобразует запрашиваемые команды автопилота из ADP в сигналы управления элемента привода, которые могут выполнять привод электродвигателей элемента привода в рамках определенных рабочих пределов. В этом отношении следует понимать, что программное обеспечение DAL обрабатывается MCP C тройным резервированием, в то время как DAL C, программное обеспечение внешнего контура, обрабатывается совершенно другим процессором. В качестве еще одного другого пояснения отдельно исполняемая программа работает в каждом MCP. MCP, которые могут называться тройными процессорами, могут выполнять идентичное программное обеспечение. Таким образом, законы управления автопилотом распределяются между ADP и тройными процессорами. ADP обрабатывает динамические характеристики внешнего контура и режимы автопилота, в то время как три MCP обрабатывают динамические характеристики внутреннего контура. ADP дополнительно обеспечивает графический интерфейс и интерфейс тестирования пилота для автопилота и выполняет законы управления автопилотом для определения команды элемента привода, на основе датчика и данных GPS. В соответствии с этим интерфейс ADP непосредственно сообщается через интерфейс с GPS и трехосевыми магнитометрами, и опосредованно с трехосевыми акселерометрами, и трехосевыми гиродатчиками скорости MCP, которые предоставляют положение крен - тангаж, пространственное положение, высоту, скорости относительно земли, курс и данные направления. ADP отслеживает работоспособность этих датчиков, но не проверяет достоверность этих данных. Переключатель теста IBIT также соединяется через интерфейс с ADP. В другом варианте осуществления ADP может быть разработан таким же образом, как MCPU, с тройной избыточностью. Используя оба MCPU и ADP в конфигурации с тройной избыточностью, автопилот может быть устойчивым к одному отказу в любом из этих модулей и все еще оставаться полностью функциональным.
MCP принимают данные из ADP, которые могут включать в себя команды, а также данные из внешнего GPS. Данные могут быть отсеяны каждым MCP для детектирования ошибок или неисправностей. Команда управления представляет собой смещение скорости, ограниченное MCP. MCP не позволяет команде из ADP создавать опасный отклик со стороны вертолета. Данные GPS используются в ADP. GPS и данные магнитометра оба используются в MCP для удаления ошибок дрейфа, взаимосвязанных с датчиками скорости каждого набора датчиков и для определения тангажа, крена и направления движения. Данные GPS также можно проверять на наличие ошибок.
MCP постоянно отслеживает как внутренние, так и внешние неисправности. В случае неисправности ADP любой один MCP может сразу распознать ситуацию на основе обновленного соответствии сигнала скорости и управления. В ответ на это MCPU в одном варианте осуществления затем обеспечивает удержание вертолета внутренним контуром управления в прямом положении и на одном уровне. В другом варианте осуществления MCPU может действовать так же, как SAS (система обеспечения устойчивости движения) или система навигационных вычислений и управлять вертолетом на основе внутренних сигналов скорости. MCP пытается поддерживать нулевые скорости и/или направление, и также активирует сигналы рупора и световые сигналы, для обозначения отказа. Эмпирически продемонстрировали, что вертолет может поддерживать длительный полет только под управлением MCP, предоставляя более чем достаточно времени для пилота, чтобы принять управление и отключить автопилот. Возможность детектирования чрезмерного отклика автопилота заложена в трех контроллерах электродвигателей, как подробно описано здесь. Тройные процессоры отслеживает датчики и также проверяет, для подтверждения, что рассчитанные отклики находятся в пределах границ. Команды тангажа и крена из ADP ограничены на основе такой фильтрации команды каждым из тройных процессоров. Каждый из тройных процессоров может детектировать, был ли превышен предел, и может инициировать безопасное отключение автопилота. Команды осей тангажа и крена могут отслеживаться идентично, но с разными предельными значениями. Отслеживание выполняется динамически; то есть предельные значения могут быть зависимыми от частоты/скорости. Свойства управления избыточностью для каждой оси могут включать в себя ограничение скорости передвижения рычага управления и отслеживание скорости движения корпуса.
Набор датчиков каждого MCP может также включать в себя запоминающее устройство, такое как, например, EEPROM, или другое соответствующее запоминающее устройство. Если возникает ошибка, детектируемая MCP во время работы, код ошибки может быть сохранен в EEPROM набора датчиков, ассоциированного с MCP. EEPROM может впоследствии быть считано в контексте определения причины отказа. EEPROM также могут содержать параметры, специфичные для модели вертолета, в котором установлен автопилот, такие как, например, константы контура управления, смещения датчика и коэффициенты усиления.
Обращаясь к фиг. 6 и 7, совместно с фиг. 1-3, следует понимать, что кожух 31 может обеспечивать преимущества в отношении установки системы автопилота в вертолете, которые не были известны до сих пор. На фиг. 6 и 7 представлены виды в перспективе варианта осуществления кожуха, включающего в себя основной электронный модуль 66 и элементы 60a и 60b привода, установленные внутри корпуса таким образом, что, выходные валы 142a и 142b каждого соответствующего элемента привода продолжаются наружу изнутри кожуха. Следует отметить, что вал 142a элемента привода выполнен более длинным, чем вал 142b элемента привода на основе конкретных требований установки. Длина каждого вала элемента привода может быть подобрана индивидуально, с учетом установки заданного типа вертолета. На фиг. 6 предусмотрен вид в перспективе спереди/сверху, в то время как на фиг. 7 представлен вид в перспективе сзади/снизу. Каждый корпус 82 элемента привода (фиг. 3), может быть выполнен так, чтобы на нем можно было установить соответствующие крепления 402, такие как, например, резьбовые крепления через отверстия, которые сформированы в кожухе 31, для поддержки элемента привода внутри кожуха 31. На фиг. 6 представлена первая пара креплений 402, которые продолжаются через верхнюю крышку кожуха и в каждый корпус элемента привода, в то время как на фиг. 7 представлена вторая пара креплений 402, которые продолжаются через верхнюю крышку корпуса и в каждый корпус элемента привода. Таким образом, элементы привода и основной электронный модуль обычно установлены внутри пространства, определенного кожухом, и установлены/размещены на внутренних поверхностях стенок кожуха.
Основной электронный модуль включает в себя по меньшей мере приводы электродвигателей для привода электродвигателей (электродвигатели BLDC в данном примере), а также контур внутреннего управления системы автопилота, как показано, например, на фиг. 5. Дополнительные компоненты, которые могут быть установлены внутри кожуха 31, могут включать в себя, например, блок питания, предназначенный для подачи питания во всю систему автопилота. Для каждого процессора MCP может быть предусмотрен независимый источник питания, который обычно установлен внутри кожуха 31. В то время как L-образный кожух предусмотрен для установки в R22, следует понимать, что такой кожух может иметь любую соответствующую форму с учетом предполагаемого применения, и не ограничен L-образной формой, если только основной электронный модуль и элементы привода могут быть совместно установлены в этом кожухе. Кожух 31 может быть выполнен с возможностью обработки сил, генерируемых элементами привода в элементах привода, установленных непосредственно на стенках или платах кожуха, например, используя крепления. В настоящем варианте осуществления каждый элемент привода закреплен на нижней плате, верхней плате и одной из плат, через которые проходят валы элемента привода. Использование кожуха 31 с целью установки громоздких электронных блоков, системы управления и элементов привода автопилота воплощает минимально интрузивный пакет легкого веса. Общий вес компонентов, удерживаемых внутри кожуха 31 и самого кожуха может быть меньше чем 8 фунтов с учетом веса самого кожуха, который меньше чем 7 фунтов. В отличие от этого, в системах автопилота предшествующего уровня техники, которые известны Заявителям, требуются отдельные установки основных электронных узлов и каждого элемента привода. Как правило, каждый элемент привода, в автопилоте предшествующего уровня техники, выполнен независимо и непосредственно установлен в структуре самого вертолета с необходимостью использования специальных или специализированных средств установки, таких как конструктивные усилители, ассоциированные с каждым элементом привода. Использование кожуха 31, как описано здесь, исключает необходимость в такой сложной независимой установке, ассоциированной с элементами привода, для обеспечения преимуществ, которые могут включать в себя уменьшение времени установки, а также уменьшение общего веса системы автопилота. Фактически, установка кожуха 31 может выполняться с использованием простого шаблона для сверления, в результате чего обеспечивается высокая степень точности, и при этом установка кожуха является чрезвычайно экономичной.
Возвращаясь к фиг. 8, вариант осуществления кожуха 31 представлен в виде в перспективе, в общем, в виде сверху, без компонентов, установленных в нем и с выбранными элементами, которые предоставлены прозрачными для представления внешнего вида других скрытых элементов. Кожух может быть сформирован, в качестве неограничительного примера, из верхней пластины 600 нижней части, монтажной пластины 602, передних крышек/пластин 604 и задних крышек/пластин 606. В задних крышках сформированы отверстия 610 для установки выходных валов элементов привода. Различные панели или пластины кожуха могут быть закреплены друг на друге любым соответствующим способом, например, с использованием сварки и/или соответствующих креплений, таких как заклепки и/или резьбовые крепления. В настоящем варианте осуществления монтажная пластина 602 включает в себя передние фланцы 614, которые продолжаются вверх. Передние крышки 604 могут включать в себя верхние фланцы 616, которые продолжаются поверх верхней пластины 600. Верхняя пластина 600 может включать в себя передние фланцы 620, которые продолжаются вниз в виде на фигуре. Крепления 622, одно из которых представлено, могут быть установлены в соответствующие отверстия с целью закрепления компонентов кожуха друг на друге. В настоящем варианте осуществления элементы привода могут поддерживаться множеством панелей кожуха, такими как задние боковые стенки, верхняя пластина 600 и монтажная пластина 602. В этом отношении корпуса 82 элемента привода (фиг. 3) могут способствовать общей структурной жесткости кожуха 31.
Как показано на фиг. 2, валы элемента привода могут соединяться через интерфейс с компонентами соединения управления через боковые стенки или переборки багажного отсека вертолета, такие как, например, первая переборка 630, через которую проходит выходной вал элемента привода тангажа, и вторая переборка 632, через которую пропущен элемент привода крена. Переборка 630 представлена как прозрачная с целью иллюстрации. Как будет дополнительно описано и в качестве неограничительного примера, кожух 31 может быть фиксировано установлен с возможностью его съема на переборках 630 и 632. В этом отношении следует отметить, что ниже кожуха в настоящем варианте осуществления присутствует зазор, поскольку пол багажного отсека ниже модулей не является плоским. Конечно, такие детали могут зависеть от установки в данном вертолете, и не предназначены для ограничения. Крепления 634, как показано на фиг. 7, и два из которых частично видимы на фиг. 2, могут использоваться с целью установки кожуха 31 на переборках 630 и 632, путем установки этих креплений через соответствующие переборки для соединения по резьбе корпусов элементов привода. Дополнительные крепления могут использоваться для закрепления кожуха 31 на переборках, как будет описано ниже. В любой установке основной кожух 31 может обеспечивать как конструктивную поддержку, так и экранирование. Корпус может быть сформирован из любого соответствующего материала, такого как листовые материалы из алюминия.
На фиг. 9 и 10 показаны виды в перспективе, представляющие вариант осуществления кожуха 31 в установленном состоянии в виде под несколько другими углами, но при этом оба чертежа ограничены представлением кожуха 31, имеющим соединение 32a управления тангажом и соединение 32b управления креном, установленными и соединенными через интерфейс с нижним концом рычага 14 управления, который показан только частично. Нижний конец рычага управления может перемещаться в любом поперечном направлении относительно движения, регулируемого пилотом. Фрикционная компоновка 680 может быть предусмотрена как оригинальное оборудование в вертолете и выполнена с возможностью ее регулирования с использованием кнопки 682 натяжения таким образом, как понятно для специалиста в данной области техники. Дистальный конец соединения 300a с ограничением силы (тангаж) включает в себя опору 700a шарнирного типа, такую как, например, опора типа шар и гнездо, которая закреплена с возможностью поворота на самом нижнем конце рычага 14. Для привода автопилота по крену опора 700b шарнирного типа на дистальном конце соединения 300b с ограничением силы может быть такого же типа и может быть закреплена с возможностью шарнирного поворота на самом нижнем рычаге 14 через планку 704 соединения для крена. Последняя сама по себе выполнена с возможностью закрепления с шарнирным поворотом на самом нижнем конце рычага управления. Следует понимать, что оригинальная карданная труба 25a и стержень 25b управления креном присутствуют, как показано на фиг. 1, но не были показаны на настоящем чертеже с целью ясности представления. Карданная труба и стержень управления креном могут оставаться неизменными и представлены в исходной форме с целью передачи действия пилота на плату автомата переноса вертолета для выполнения управления циклическим шагом.
Все еще обращаясь к фиг. 9 и 10, выходной вал 142a (см. фиг. 2) элемента 60a привода тангажа установлен в изолятор 302a вибрации, который в свою очередь, шарнирно закреплен на соединении 300a с ограничением силы. Аналогично выходной вал 142b (см. фиг. 2) элемента 60b привода тангажа установлен в изолятор 302b вибрации, который, в свою очередь, шарнирно закреплен на соединении 300b с ограничением силы. Как отмечено выше, вал 142a элемента привода выполнен длиннее, чем вал 142b элемента привода. Как лучше всего видно на фиг. 10, узел 708 подшипника может использоваться для поддержки удлиненного вала элемента привода. Узел подшипника может быть закреплен на кожухе 31 любым соответствующим способом, таким как, например, используя съемные крепления 709, как представлено. В настоящем варианте осуществления переборка 630 (показанная на фиг. 2) зажата между корпусом подшипника и кожухом с креплениями 709, соединенными по резьбе с кожухом элемента 60a привода тангажа. Кожух 31, элементы привода, изоляторы вибрации и соединения с ограничением силы могут быть предварительно собраны для установки, в виде модуля, на вертолет. Следует понимать, что болт, формирующий точку 710 крепления тангажа/крена, может быть выполнен удлиненным для установки дистального конца шарнирного крепления, соединения 300a натяжения (для тангажа), а также для шарнирного крепления планки 704 соединения для крена. Противоположный конец планки 704 соединения для крена закреплен с возможностью шарнирного поворота на дистальном конце соединения 300b с ограничением силы для крена, на котором также сформировано отверстие для закрепления рычагов 714 трения для крена. Отверстие 716 доступа (фиг. 2) позволяет пропускать соединение управления элемента привода для крена через туннель шасси в туннель консоли вертолета. Кожух 31 может быть дополнительно закреплен с возможностью его съема на переборках 630 и 632, например, используя резьбовые крепления 720, только два из которых индивидуально обозначены, которые могут продолжаться через соответствующие одни из переборок для соединения с пластинами-гайками любого соответствующего типа, установленными внутри кожуха 31. Следует отметить, что были показаны отверстия 722, которые выполнены аналогично пластинам-гайкам, для установки дополнительных креплений 720. Любое соответствующее количество таких креплений можно использовать. Кроме того, использование креплений 720 не предназначено для ограничения, и кожух может быть закреплен в и установлен в положении любым соответствующим образом. Возможность съема кожуха может способствовать конфигурации общего основного модуля 30 автопилота, в качестве элемента, который не подлежит обслуживанию пользователем. Таким образом, если какая-либо проблема возникнет в отношении работы основного модуля автопилота, его можно легко полностью снять с вертолета и передать на предприятие обслуживания для ремонта.
Как видно на фиг. 9 и 10, помимо кожуха 31 механическая система автопилота включает в себя три основных механических компонента: элементы 60 привода, изоляторы 302 вибрации и соединение 300 с ограничением силы. Элементы привода передают движение к системе управления винтокрылым летательным аппаратом, в то время как изоляторы вибрации уменьшают два колебательных движения на оборот, которые возникают, например, в соединении управления легких винтокрылых летательных аппаратов, таких как R22, для предотвращения воздействия вибрационных нагрузок на элементы управлении винтокрылым летательным аппаратом и для увеличения срока службы, благодаря уменьшению степени усталости элемента привода, как описано выше. Соединения 300 с ограничением силы передают движение от элемента привода к соединению управления винтокрылым летательным аппаратом, обеспечивая, таким образом, для пилота возможность преодоления действия автоматического управления входных сигналов от элементов 60 привода. В вертолете, имеющем соединение управления, которое не подвергается циклическим колебаниям, таком, как, например, вертолет, имеющий систему управления с гидравлической вспомогательной системой управления циклическим шагом, изоляторы 302 вибрации могут быть заменены элементами в виде жестких рычагов, которые могут быть неупругими, по меньшей мере, с практической точки зрения.
После представленного выше подробного описания элементов 60 привода теперь внимание будет направлено на фиг. 11, на которой иллюстрируются дополнительные детали в отношении изолятора 302 вибрации. Как описано выше, изоляторы 302a и 302b вибрации могут иметь идентичную конструкцию, и поэтому номер 302 ссылочной позиции может относиться к любому из изолятора вибрации. Изолятор вибрации включает в себя рычаги 1100a и 1100b веса, которые могут быть идентичными по конструкции. Рычаги веса могут совместно обозначаться номером 1100 ссылочной позиции и могут быть сформированы из любого соответствующего листового материала, такого как, например, алюминий. На первом конце рычагов веса установлен штырь 1102, который выполнен с возможностью соединения с одним концом соединения 300 с ограничением силы (фиг. 9 и 10). Рычаги веса могут быть жестко закреплены на штыре 1102 любым соответствующим образом, например, используя прессовую посадку или сварку. В этом отношении нет необходимости, чтобы штырь соединялся с рычагами веса с возможностью шарнирного поворота. На штыре 1102 может быть определено плечо 1104, и он может включать в себя резьбовой дистальный конец таким образом, что один конец соединения с ограничением силы может быть захвачен между плечом 1104 и гайкой 1108. Противоположные концы рычагов 1100 веса жестко закреплены на поворотных весах 1110, которые могут быть сформированы из любого соответствующего материала, такого, как, например, латунь. Крепление может быть выполнено любым соответствующим образом, например, используя резьбовые крепления 1112. Каждый рычаг веса может дополнительно включать в себя лапку 1114a или 1114b держателя пружины, которая может быть сформирована как единое целое с основным корпусом рычага веса и может быть поперечно отогнута. Лапки держателя пружины будут описаны более подробно ниже. На рычаги веса устанавливают набор 1120 подшипника, имеющий штырь 1122, который продолжается через конец шарнирного поворота рычага 1130 управления таким образом, что рычаги веса могут одновременно поворачиваться относительно рычага 1130 управления. Следует отметить, что на каждом валу 142 элемента привода (см. фиг. 7 и 9) установлен один рычаг управления, как показано на фиг. 9, и обозначен номерами 1130a и 1130b ссылочных позиций.
Как показано на фиг. 12, совместно с фиг. 11, на первой представлен вид в перспективе с покомпонентным представлением деталей, который иллюстрирует один рычаг 1130 управления и соответствующие компоненты. В каждом рычаге управления сформировано отверстие 1132 для соединения с ограничением силы и отверстие 1140 вала элемента привода, которое выполнено с возможностью установки в него одного из валов 142 элемента привода. При его установке седло 1142 вала элемента привода выравнивается с ключевым отверстием 1144, в которое устанавливается поперечный ключ 1148. Последний включает в себя сквозные отверстия 1150, например, для установки провода безопасности (не показан), для закрепления поперечного ключа в установленное положение. На каждом рычаге управления могут быть сформированы противоположные карманы 1152, представляющие собой удаленный материал, которые, в случае необходимости, позволяют уменьшить вес рычага управления.
Далее внимание будет направлено на фиг. 11-13. на фиг. 13 показан вид в перспективе изолятора 302 вибрации с рычагом 1100a веса, представленным прозрачным, с целью ясности иллюстрации. Первая изолирующая пружина 1302a установлена между лапкой 1114a держателя (фиг. 11) рычага 1100a веса и рычагом 1130 управления, в то время как вторая изолирующая пружина 1302b захвачена между лапкой 1114b держателя рычага 1100b веса и рычагом 1130 управления. Пружина 1302 может быть сформирована из любого соответствующего материала, такого как, например, сталь или коррозионно-устойчивые сплавы, такие как сплавы на основе никеля и хрома. Держатель 1310 пружины проходит через внутреннее пространство каждой изолирующей пружины и через рычаг 1130 управления таким образом, что держатель пружины захватывается между лапками 1114a и 1114b держателя. В этом отношении держатель пружины может иметь, например, прямоугольную или другую соответствующую форму в поперечном сечении, с головкой 1312 уменьшенного размера по сравнению с формой поперечного сечения общей длины держателя пружины. Таким образом, основание головки 1312 образует одно или больше плеч, которые могут быть установлены во внутреннюю поверхность каждого лепестка держателя так, что сама головка 1312 устанавливается в соответствующее/взаимодополняющее отверстие, определенное лепестком держателя, как показано на фиг. 11. В рычаге 1130 управления (фиг. 12) образованы противоположные карманы 1320 для пружины, в которых устанавливаются соответствующие внутренние концы изолирующих пружин, с упором в плечо 1324, в то время как внешний конец каждой изолирующей пружины смещается относительно прокладки 1328, таким образом, в свою очередь, он прижимается к одной или больше лапкам держателя. Следует отметить, что одна из прокладок представлена прозрачной в виде на фиг. 13, для того, чтобы способствовать возможности просмотра одного конца держателя 1310 пружины. В варианте осуществления каждое плечо 1324 может быть установлено под углом таким образом, что когда соответствующая изолирующая пружина 1302 полностью сжата, плечо образует плоскость, которая, по меньшей мере, приблизительно параллельна соответствующей лапке держателя, устанавливаясь противоположно ей.
Изолятор 302 вибрации используется как устройство переменной податливости, действующее между одним элементом 60 привода и соответствующим соединением 300 с ограничением силы. Хотя дополнительные детали будут представлены ниже, в данный момент достаточно отметить, что соединения 300 с ограничением силы являются эффективно жесткими в отношении циклической вибрации или частоты сотрясений рычага управления и аналогично являются эффективно жесткими в ответ на нормальные воздействия автопилота со стороны элементов 60 привода. Изолятор вибрации является очень жестким для входных воздействий низкой частоты, поступающих от элемента 60 привода через вал элемента привода, но является очень податливым на частоте двух колебаний циклической вибрации за оборот, составляющей 17,5 Гц, которая присутствует на соединения 300 с ограничением силы. Во время работы, когда вал элемента привода находится в фиксированном положении, рычаги 1100 веса колеблются вокруг шарнира 1122 таким образом, что они поочередно сжимают изолирующие пружины 1302 между каждым лепестком 1114 держателя рычага веса и каждым рычагом 1130 управления, в соответствии с циклическими колебаниями рычага управления. Таким образом, вал элемента привода эффективно изолирован от частоты двух колебаний циклической вибрации за оборот. В это же время частотный отклик каждого элемента 60 привода составляет приблизительно 3 Гц с целью вращения вала элемента привода, для обеспечения воздействия автопилота. В соответствии с этим обеспечивается достаточное разделение между максимальной частотой управления входных воздействий элемента привода и частотой двух колебаний циклической вибрации за оборот таким образом, что силы управления с выходного вала элемента привода проходят через изолятор вибрации и в систему управления циклическим шагом вертолета через соединение 300 силы растяжения, в то время как вибрационные силы, индуцируемые ротором, изолируются от элементов привода. В то время как настоящий вариант осуществления изолятора вибрации выполнен для использования в вертолете R22, имеющем частоту циклической вибрации приблизительно 17,5 Гц, изолятор вибрации может быть легко модифицирован для работы с вертолетом, который проявляет другую частоту циклической вибрации.
После подробного описания изолятора вибрации в соответствии с настоящим раскрытием представленные выше дополнительные детали будут представлены в отношении варианта осуществления, который выполнен для циклической вибрации 17,5 Гц, которая является типичной для вертолета Robinson R22. Таким образом, рычаги веса, используемые как общий выходной рычаг изолятора, настроечный вес и ассоциированные размеры составляют резонансную систему, имеющую резонансную частоту, которая, по меньшей мере, приблизительно равна циклической частоте вибраций вертолета. Конечно, настроечный вес может быть отрегулирован так, чтобы он воспринимал определенный диапазон разных резонансных частот. Аналогично разные размеры могут быть отрегулированы для изменения резонансной частоты, если это требуется. В настоящем варианте осуществления пружины 1302 имеют комбинированную константу пружины 16,6 фунтов силы/дюйм, которая размещена на расстоянии 2,0 дюйма от шарнира 1122. Поворотный вес имеет эквивалентную массу 0,2 фунта массы (фунт массы) на расстоянии от 3,3 дюйма от шарнира 1122.
Теперь внимание будет направлено на фиг. 14, на которой показан вид в перспективе варианта осуществления соединения 300 с ограничением силы. Прежде всего следует отметить, что соединение с ограничением силы разработано так, чтобы использоваться как жесткий стержень для толкания в направлении толкания - вытягивания на нагрузках ниже заданной силы прорыва так, чтобы она была податливой для нагрузок больше силы прорыва. Это позволяет пилоту легко преодолевать действие автоматического управления через элементы 60 привода в любое время, даже если один или оба элемента привода заклинят. Конструкция может обеспечить силу преодоления действия автоматического управления, которая больше, чем нормальные силы управления, но с которыми может легко справиться пилот. В настоящем варианте осуществления первый конец 1402 соединения с ограничением силы разработан для установки на валу 1102 фиг. 11, в то время как второй, противоположный, конец 700 разработан для установки и соединения с системой управления циклическим шагом, как показано, например, на фиг. 10 и 11, в которых шарнирное крепление 700a соединения 300a с ограничением силы для тангажа (фиг. 9 и 10) закреплено с нижней части рычага управления, и шарнирное крепление 700b соединения 300b с ограничением силы для крена закреплено на соединительной планке 704 для крена. На каждом конце соединения с ограничением силы может использоваться крепление типа шар и гнездо, которое может обеспечивать движения, такие как изогнутые движения и движения из стороны в сторону, которые характерны для движения нижней части рычага 14 при управлении пилотом. Первый конец 1402 может включать в себя оконечную крышку 1404 и фиксирующее кольцо 1406, которое соединяется с корпусом 1410 по резьбе. На последнем может быть сформирована регулировочная резьба 1412. В соответствии с этим длина основного участка внутренней полости определена оконечной крышкой, совместно с корпусом, и поэтому ее можно регулировать, как будет дополнительно описано ниже. Следует отметить, что ориентация соединения с ограничением силы может быть противоположной из конца в конец для заданной установки, если только зазоры будут соответствующими.
Рассмотрим фиг. 15 и 16, совместно с фиг. 14, на фиг. 15 показан вид в перспективе с покомпонентным представлением деталей соединения 300 с ограничением силы, показанный здесь для представления деталей внутренних компонентов, в то время как на фиг. 16 показан вид в перспективе в сборе с частичным разрезом. В корпусе 1410 установлен вал 1412 для линейного движения 1414, как представлено двунаправленной стрелкой. На валу 1412 сформировано плечо 1418, на которое может быть установлен диск 1420 смещения пружины. Конечный участок 1422 с уменьшенным диаметром вала продолжается от плеча 1418 до поджатой пружиной головки 1424. Поджатый пружиной диск 1420 выполнен с возможностью скольжения/поперечного движения вдоль оконечного участка 1422 в направлении стрелки 1414, в соответствии с внешними силами смещения. В собранном состоянии внутри верхней цилиндрической крышки 1430 устанавливается поджатая пружиной головка 1424 для движения, в соответствии со стрелкой 1414. Корона 1432 верхней цилиндрической крышки, в свою очередь, устанавливается внутри внутреннего пространства, определенного пружиной 1440, когда пружина находится в состоянии предварительной нагрузки. Аналогично поджатый пружиной диск, конец 1442 короны и верхняя цилиндрическая крышка выполнены с возможностью поперечного/скользящего соединения вдоль длины оконечного участка 1422 вала 1412. Пружина 1440, например, представляет собой спиральную витую пружину, которая может быть сформирована с использованием соответствующего материала, который может быть устойчивым к коррозии. Верхняя цилиндрическая крышка 1430 и поджатый пружиной диск 1420 могут быть сформированы из любого соответствующего материала, такого как, например, алюминий. Вал 1412 может быть сформирован из любого соответствующего материала, такого как, например, нержавеющая сталь. Корпус 1410 и оконечная крышка 1404 могут быть сформированы из любого соответствующего материала, такого как, например, алюминий.
На фиг. 16 иллюстрируется соединение с ограничением силы, в связи с тем, что можно назвать свободным состоянием, при котором пружина 1440 захвачена между закраиной 1444 верхней цилиндрической крышки и диском 1420 смещения пружины таким образом, что пружина предварительно нагружена между ними. В таком свободном состоянии поджатая пружиной головка 1424 упруго смещается относительно конца 1442 короны верхней цилиндрической крышки. Регулировочное кольцо 1406 может быть отрегулировано для компенсации зазора между различными компонентами таким образом, что пружина 1440 будет растянута в как можно большей степени, в то время как при этом компенсируется любой люфт между различными компонентами. Таким образом, закраина 1444 всего лишь находится в контакте с оконечной крышкой 1404, в то время как поджатый пружиной диск 1420 всего лишь находится в контакте с плечом 1450 корпуса 1410 и поджатая пружиной головка 1424, упруго смещена относительно конца 1442 верхней цилиндрической крышки. Как описано выше, свободное состояние устанавливает величину сжатия пружины 1440, которое называется предварительной нагрузкой пружины. Предварительная нагрузка устанавливает силу страгивания и представляет минимальный уровень сжатия пружины в сборке таким образом, что поэтому она начинает сжиматься всякий раз, когда внешние силы прикладываются к соединению с ограничением силы, которые превышают значение предварительной нагрузки/страгивания пружины. В варианте осуществления для пружины 1440 может быть установлена приблизительно половина ее нагрузке в состоянии полного сжатия, в качестве значения предварительной нагрузки. В настоящем варианте осуществления предварительную нагрузку пружины выбирают, равной, по меньшей мере, приблизительно 25 фунтов силы. Соответствующий диапазон значений предварительной нагрузки может быть выбран так, чтобы он удовлетворял требованиям конкретного вертолета.
На фиг. 17 показан вид в перспективе с частичным разрезом, который иллюстрирует полностью отведенное состояние соединения 300 с ограничением силы. Как показано, вал 1412 в максимальной степени устанавливается внутри корпуса 1410, имеющий поджатую пружиной головку 1424 и закраину 1444, установленные в оконечной крышке 1404. В это же время пружина 1440 подвергается максимальной степени сжатия в сборке. На фиг. 17 демонстрируется приложение к пружине 1440 внешней силы сжатия достаточной величины, больше предварительной нагрузки пружины, для превышения силы страгивания и перемещения концов соединения с ограничением силы в направлении друг друга, уменьшая, таким образом, длину между ее противоположными концами. В идеальном случае соединение с ограничением силы смещается при заранее установленной нагрузке и прикладывает однородную силу по мере своего движения. С практической точки зрения пружину выбирают так, чтобы она обеспечивала требуемую силу предварительной нагрузки и не превышала поддающуюся управлению пилотом силу, когда соединение находится в состоянии полного отклонения.
На фиг. 18 показан вид в перспективе с частичным разрезом, который иллюстрирует полностью расширенное состояние соединения 300 с ограничением силы. Как показано, соединение с ограничением силы подвергается внешней силе, которая имеет достаточную величину для обеспечения полного растяжения соединения. Следует отметить, что такая сила может иметь, по меньшей мере, приблизительно такую же величину, как и сила, хотя и направленная противоположно в эффективном направлении, которая обеспечивает полностью отведенное состояние по фиг. 17. Таким образом, хотя пружина 1440 смещена в поперечном направлении на фиг. 18 по сравнению с фиг. 17, пружина сжимается до одинаковой длины на обоих чертежах. Предполагая, с целью описания, что первый конец 1402 зафиксирован в своем положении, внешняя сила вытягивает второй конец 700 таким образом, что конец 1442 короны верхней цилиндрической крышки вытягивается в правую сторону в виде на чертеже, в результате чего, закраина 1444 сжимает пружину 1440. Такое движение приводит к смещению конца участка 1422 с уменьшенным диаметром вала 1412 вправо в виде на чертеже до тех пор, пока головка 1424 поджатая пружиной не прижмет конец 1442 короны так, чтобы он вошел в контакт с поджатым пружиной диском 1420. В варианте осуществления константа упругости для пружины 1440 должна быть достаточно малой, для обеспечения для узла возможности достижения своего полного конца перемещения, как показано на фиг. 17 и 18. В то время как соединение с ограничением силы было представлено в трех разных рабочих состояниях, для специалиста в данной области техники будет понятно, что переходы устройства из одного состояния в другое выполняются таким образом, в соответствии с этим описанием.
Представленное выше описание изобретения было представлено с целью иллюстрации и описания. Оно не рассматривается как исчерпывающее или ограничивающее изобретение раскрытыми точной формой или формами, и другие модификации и варианты возможны с учетом описанных выше описаний, в которых специалисты в данной области техники могут распознать определенные модификации, перестановки, дополнения и их подкомбинации.
Все элементы, части и этапы, описанные здесь, предпочтительно, включены. Следует понимать, что любые из этих элементов, частей и этапов могут быть заменены другими элементами, частями и этапами или могут быть удалены в целом, как будет очевидно для специалиста в данной области техники.
Представленное описание раскрывает, по меньшей мере, следующее:
Элемент привода автопилота включает в себя первой и второй электродвигатели, каждый из которых включает в себя вращающийся выходной вал электродвигателя таким образом, что любой один или оба из электродвигателей могут приводить в движение выходной вал элемента привода. Кожух основного модуля автопилота установлен с возможностью его съема с вертолета, рядом с управлением циклическим шагом, и в нем обычно размещены элементы привода автопилота, а также основная электронная схема автопилота. Изолятор циклической вибрации съемно поддерживается валом элемента привода для совместного вращения и соединен с управлением циклическим шагом для аттенюации частоты циклической вибрации на валу элемента привода, в то время как выходное вращение вала элемента привода ниже резонансной частоты соединено с системой управления циклическим шагом. Соединение с ограничением силы включает в себя первый и второй концы, и переменную длину между ними. Соединение с ограничением силы, имеющее длину в свободном состоянии, когда приложена сила меньше, чем сила страгивания, и переменная длина изменяется, когда приложенная сила превышает силу страгивания, для обеспечения преодоление пилотом действия автоматического управления.
Далее раскрыты, по меньшей мере, следующие концепции:
Концепция 1. В системе автопилота, которая выполнена с возможностью автоматического управления вертолетом, путем обеспечения привода для управления циклическим шагом вертолета, в ответ на сигналы электрических команд и в которой управление циклическим шагом подвергается циклической вибрации со стороны ротора вертолета, упомянутая система автопилота, содержащая:
элемент привода, предназначенный для приема сигналов электрической команды, для вращения выходного вала элемента привода, в соответствии с нею, элемент привода, включающий в себя пару из первого и второго электродвигателей с резервированием, каждый из которых включает в себя вращающийся выходной вал электродвигателя и компоновку зубчатой передачи, включающую в себя выходной вал элемента привода для функционального соединения с упомянутой системой управления циклическим шагом и выполненную с возможностью соединения выходного вала электродвигателя одного из первого и второго электродвигателей, для работы, по меньшей мере, в (i) первом режиме, в котором как первый, так и второй электродвигатели способствуют вращению выходного вала элемента привода, (ii) втором режиме, в котором первый электродвигатель вращает выходной вал элемента привода, из-за отказа второго электродвигателя и (iii) третьем режиме, в котором второй электродвигатель вращает выходной вал, из-за отказа первого электродвигателя;
соединение с ограничением силы для обеспечения преодоления пилотом действия автоматического управления циклическим шагом упомянутым элементом привода, упомянутое соединение с ограничением силы, имеющее первый конец, второй конец и переменную длину между ними, ориентированную вдоль оси удлинения, при этом первый конец соединен с системой управления циклическим шагом, упомянутое соединение с ограничением силы, имеющее длину в свободном состоянии, которая представляет собой переменную длину между первым и вторым концами, когда менее чем сила страгивания приложена к первому и второму концам вдоль упомянутой оси удлинения, для обеспечения соответствующего движения упомянутого второго конца с первым концом, и выполненное таким образом, что переменная длина изменяется от длины в свободном состоянии при приложении внешней силы, которая прикладывается к первому и второму концам вдоль удлиненной оси, которая равна или больше чем сила страгивания для упомянутого преодоления пилотом действия автоматического управления; и
изолятор циклической вибрации, который съемно удерживается на упомянутом выходном валу элемента привода для одновременного вращения с ним и соединен со вторым концом соединения с ограничением силы, таким образом, что упомянутая циклическая вибрация подведена к изолятору циклической вибрации с соединением с ограничением силы, и изолятор циклической вибрации выполнен таким образом, что его резонансная частота, по меньшей мере, приблизительно соответствует частоте циклической вибрации для цикла вибрации, для обеспечения движения второго конца соединения с ограничением силы относительно вала элемента привода на частоте циклической вибрации, изолируя при этом выходной вал элемента привода от частоты циклической вибрации, и для передачи выходного вращения выходного вала элемента привода ниже резонансной частоты на соединение с ограничением силы для передачи в систему управления циклическим шагом.
Концепция 2. Как часть автопилота, для обеспечения автоматического управления вертолетом, путем привода одного или больше элементов управления полетом, элемент привода, содержащий:
пару из первого и второго электродвигателей с резервированием, каждый из которых включает в себя вращающийся выходной вал электродвигателя; и
компоновку зубчатой передачи, включающую в себя выходной вал элемента привода для функционального соединения с упомянутыми элементами управления полетом, и выполненную с возможностью соединения выходного вала с каждым из одного из первого и второго электродвигателей для работы, по меньшей мере, в (i) первом режиме, в котором как первый, так и второй электродвигатели способствуют вращению выходного вала элемента привода, (il) во втором режиме, в котором первый электродвигатель вращает выходной вал элемента привода, из-за отказа второго электродвигателя, и (iii) в третьем режиме, в котором второй электродвигатель вращает выходной вал, из-за отказа первого электродвигателя.
Концепция 3. Элемент привода по Концепции 2, в котором первый и второй электродвигатели представляют собой электрические двигатели.
Концепция 4. Элемент привода по Концепции 2 или 3, в котором выходной вал электродвигателя каждого из электродвигателей осуществляет привод общего ведущего зубчатого колеса компоновки зубчатых колес.
Концепция 5. Элемент привода по Концепции 4, в котором отказ одного из первого и второго электродвигателей приводит к тому, что другой один из электродвигателей выполняет привод общего ведущего зубчатого колеса и, таким образом, выходного вала электродвигателя другого отказавшего электродвигателя.
Концепция 6. Элемент привода по любой одной из Концепций 2-5, включающий в себя компоновку сцепления, которая вставлена в компоновку зубчатых колес в промежуточном положении для избирательного и одновременного отключения вращения первого и второго электродвигателей выходного вала элемента привода.
Концепция 7. Элемент привода по любой одной из Концепций 2-6, в котором упомянутый электродвигатель взаимодействует с компоновкой зубчатой передачи для обеспечения доступной выходной силы, по меньшей мере, 300 фунтов.
Концепция 8. Элемент привода по любой одной из Концепций 2-7, в котором компоновка зубчатых колес обеспечивает передаточное число приблизительно 1720:1.
Концепция 9. Компоновка управления элементом привода, содержащая:
элемент привода по Концепции 2, в котором каждый из первого и второго электродвигателей представляет собой бесщеточный электродвигатель постоянного тока, который включает в себя компоновку датчиков Холла, которые генерируют выходные сигналы Холла, которые обозначают текущее положение выходного вала электродвигателя, в соответствии с вращением; и
контроллер элемента привода, который выполнен с возможностью приема выходных сигналов Холла и разрешения текущего положения каждого выходного вала электродвигателя, и, таким образом, выходного вала элемента привода, на основе выходных сигналов Холла.
Концепция 10. Компоновка управления элементом привода по Концепции 9, в которой положение выходного вала элемента привода компоновки зубчатых колес детектируется с разрешением приблизительно 0,017 градусов на основе выходных сигналов Холла.
Концепция 11. Система автопилота для вертолета, содержащая:
модуль дисплея автопилота, который установлен на инструментальной консоли вертолета, по меньшей мере, для отображения полетных данных автопилота для пилота вертолета;
кожух основного модуля автопилота, который съемно установлен на вертолете, рядом с системой управления циклическим шагом вертолета и который определяет внутреннее пространство основного модуля;
набор элементов привода, установленных внутри внутреннего пространства основного модуля, включающий в себя элемент привода тангажа, имеющий выходной вал элемента привода тангажа, и элемент привода крена, имеющий выходной вал элемента привода крена таким образом, что не более, чем вал элемента привода тангажа и вал элемента привода крена набора элементов привода продолжается, по меньшей мере, частично, наружу из упомянутого кожуха основного модуля автопилота для обеспечения механических сил управления для системы управления циклическим шагом вертолета; и
электронный блок основного модуля, установленный внутри упомянутого внутреннего пространства основного модуля и электрически соединенный с упомянутым модулем дисплея автопилота и с упомянутым набором элементов привода, для обеспечения сигналов электрического управления для элементов привода таким образом, что электронный блок основного модуля и набор элементов привода, в общем, распложены внутри внутреннего пространства основного модуля.
Концепция 12. Система автопилота по Концепции 11, в которой кожух основного модуля имеет L-образную форму в виде в плане.
Концепция 13. Система автопилота по Концепции 11 или 12, в которой кожух основного модуля выполнен с возможностью съемного закрепления на паре существующих переборок вертолета без дополнительного усиления существующих переборок.
Концепция 14. Система автопилота по Концепции 12, в которой элемент привода тангажа и элемент привода крена поддерживаются на противоположных концах L-образной формы внутри внутреннего пространства основного модуля.
Концепция 15. Система автопилота по любой одной из Концепций 11-14, в которой каждый элемент привода включает в себя корпус элемента привода, имеющий верхнюю стенку корпуса и нижнюю стенку корпуса, и кожух основного модуля включает в себя верхнюю крышку и нижнюю крышку таким образом, что корпус элемента привода поддерживается во внутреннем пространстве основного модуля так, что верхняя стенка корпуса устанавливается на верхней крышке, и нижняя стенка корпуса устанавливается на нижней крышке.
Концепция 16. Система автопилота по Концепции 15, в которой каждый корпус элемента привода включает в себя переднюю стенку корпуса, и корпус элемента привода удерживается во внутреннем пространстве основного модуля так, что его передняя стенка корпуса устанавливается на боковой стенке корпуса основного модуля, и эта боковая стенка продолжается между верхней крышкой и нижней крышкой.
Концепция 17. Система автопилота по Концепции 15 или 16, в которой верхняя крышка и нижняя крышка каждая имеет L-образную форму.
Концепция 18. Система автопилота по Концепции 15, 16 или 17 в которой верхняя стенка корпуса каждого элемента привода съемно закреплена на верхней крышке, и нижняя стенка корпуса каждого элемента привода съемно закреплена на нижней крышке.
Концепция 19. Система автопилота по Концепции 15, 16, 17 или 18, в которой кожух основного модуля включает в себя первую боковую стенку и вторую боковую стенку, каждая из этих боковых стенок поддерживают верхнюю крышку и нижнюю крышку с разносом между ними, и вал элемента привода тангажа продолжается через первую боковую стенку, в то время как вал элемента привода крена продолжается через вторую боковую стенку.
Концепция 20. Система автопилота по Концепции 19, в которой кожух основного модуля выполнен с возможностью съемного закрепления на паре существующих переборок вертолета без дополнительного усиления существующих переборок, и вал элемента привода тангажа продолжается через первую одну из переборок, в то время как вал элемента привода крена продолжается через вторую одну из переборок.
Концепция 21. Система автопилота по любой одной из Концепций 11-20, в которой электронный блок основного модуля включает в себя внутренний контур, который выполнен с возможностью управления, по меньшей мере, приблизительно, мгновенными значениями пространственного положения вертолета.
Концепция 22. Система автопилота по Концепции 21, в которой модуль дисплея автопилота включает в себя внешний контур, который выполнен с возможностью передачи навигационных команд на внутренний контур электронного блока основного модуля.
Концепция 23. В системе автопилота, которая выполнена с возможностью автоматического управления вертолетом, путем привода управления циклическим шагом вертолета, в котором управление циклическим шагом подвергается воздействию частоты циклической вибрации в соответствии с вращением ротора вертолета, устройство, содержащее:
изолятор циклической вибрации, который съемно установлен на упомянутом валу элемента привода для взаимодействия с ним и соединен с системой управления циклическим шагом вертолета, проявляя резонансную частоту, которая, по меньшей мере, приблизительно согласована с частотой циклической вибрации для движения управления циклическим шагом относительно вала элемента привода таким образом, что происходит аттенюация частоты циклической вибрации на валу элемента привода, и выходное вращение вала элемента привода ниже резонансной частоты соединено с управлением циклическим шагом.
Концепция 24. Система автопилота, которая выполнена с возможностью автоматического управления вертолетом, путем привода управления циклическим шагом вертолета, причем такое управление циклическим шагом подвергается циклической вибрации, которая соответствует вращению ротора вертолета, изолятор циклической вибрации, содержащий:
рычаг управления, который съемно соединен с валом элемента привода для поддержания изолятора циклической вибрации таким образом, что рычаг управления одновременно вращается с валом элемента привода;
выходной рычаг, который соединен с управлением циклическим шагом вертолета и поэтому подвергается упомянутой циклической вибрации; и
упругую компоновку, которая установлена между рычагом управления и выходным рычагом таким образом, что выходной рычаг колеблется в соответствии с циклической вибрацией и относительно рычага управления для механической изоляции вала элемента привода от циклической вибрации при передаче вращательных движений привода вала элемента привода на выходной рычаг, чтобы таким образом передать вращательные движения привода в систему управления циклическим шагом для привода автопилота системы управления циклическим шагом.
Концепция 25. Изолятор циклической вибрации по Концепции 24, в котором рычаг управления, выходной рычаг и упругая компоновка выполнены с возможностью взаимодействия таким образом, что выходной рычаг колеблется на резонансной частоте, которая, по меньшей мере, приблизительно равна частоте циклической вибрации для циклической вибрации.
Концепция 26. Изолятор циклической вибрации по Концепции 24 или 25, в котором выходной рычаг поворачивается вокруг оси шарнирного поворота, которая определена рычагом управления, и ось шарнирного поворота смещена от вала элемента привода.
Концепция 27. Изолятор циклической вибрации по Концепции 26, в котором выходной рычаг поддерживает выходной вал, который соединен с системой управления циклическим шагом, и выходной вал находится на противоположной стороне оси шарнирного поворота относительно упругой компоновки.
Концепция 28. Изолятор циклической вибрации по концепции 27, в котором выходной рычаг поддерживает вес настройки на противоположной стороне оси шарнирного поворота относительно выходного вала.
Концепция 29. Изолятор циклической вибрации по Концепции 26, в котором выходной рычаг включает в себя выходной вал, который соединен с системой управления циклическим шагом, и выходной вал находится на противоположной стороне от вала элемента привода относительно положения, в котором упругая компоновка находится в контакте с рычагом управления.
Концепция 30. Система автопилота, которая выполнена с возможностью автоматического управления вертолетом путем привода элемента привода, имеющего вал элемента привода, для привода управления циклическим шагом вертолета, устройство, содержащее:
соединение с ограничением силы, имеющее первый конец, второй конец и переменную длину между ними, ориентированную вдоль оси удлинения так, что первый конец соединен с валом элемента привода, и второй конец соединен с управлением циклическим шагом, упомянутое соединение с ограничением силы, имеющее длину в свободном состоянии как переменную длину между первым и вторым концами, когда меньше чем силу страгивания прикладывают к первому и второму концам вдоль упомянутой оси удлинения, для обеспечения соответствующего движения системы управления циклическим шагом, в ответ на воздействие элемента привода, и выполненное таким образом, что переменная длина изменяется от длины в свободном состоянии, в ответ на внешнюю силу, которая прикладывается к первому и второму концам вдоль оси удлинения, которая равна или больше, чем сила страгивания для обеспечения возможности для пилота преодоления действия автоматического управления циклическим шагом элементом привода.
Концепция 31. Устройство по Концепции 30, в котором переменная длина уменьшается от длины в свободном состоянии, в соответствии с внешней силой, прикладываемой со сжатием вдоль оси удлинения, и переменная длина увеличивается относительно длины в свободном состоянии, в ответ на приложение внешней силы, которая прикладывается в направлении растяжения вдоль оси удлинения.
Концепция 32. Устройство по Концепции 30 или 31, в котором первый конец поддерживается корпусом, который определяет внутреннее пространство корпуса, и вал удлинения поддерживается так, что он продолжается наружу из внутреннего пространства корпуса и для движения вдоль оси удлинения, и дистальный конец вала удлинения поддерживает второй конец.
Концепция 33. Устройство по Концепции 32, в котором внутреннее пространство корпуса принимает упругий элемент, который находится в состоянии минимального сжатия для упомянутой длины в свободном состоянии и в соответствии с изменениями движения длины в свободном состоянии упругий элемент подвергается дополнительному сжатию.
Концепция 34. Устройство по Концепции 33, в котором упругий элемент представляет собой спиральную витую пружину, имеющую первый и второй противоположные концы.
Концепция 35. Устройство по Концепции 34, в котором спиральная витая пружина поддерживается таким образом, что первый конец пружины движется в направлении второго конца пружины, когда переменная длина увеличена за пределы длины в свободном состоянии таким образом, что пружина смещается в направлении второго конца соединения с ограничением силы.
Концепция 36. Устройство по Концепции 34, в котором спиральная витая пружина поддерживается таким образом, что второй конец пружины движется в направлении первого конца пружины, когда переменная длина уменьшается до длины меньше, чем свободная длина, таким образом, что пружина смещается в направлении первого конца соединения с ограничением силы.
Концепция 37. В системе автопилота, которая выполнена с возможностью автоматического управления вертолетом, обеспечивая электрические сигналы команды для элемента привода, для привода управлением циклическим шагом вертолета, причем управление циклическим шагом подвергается воздействию циклической вибрации, на которую воздействует вращение ротора вертолета, соединение автопилота, содержащее
соединение с ограничением силы для обеспечения возможности преодоления пилотом действия автоматического управления циклическим шагом упомянутым элементом привода, упомянутое соединение с ограничением силы, имеющее первый конец, второй конец и переменную длину между ними, ориентированную вдоль оси удлинения так, что первый конец соединен с системой управления циклическим шагом, упомянутое соединение с ограничением силы, имеющее длину в свободной состоянии как переменную длину между первым и вторым концами, когда менее чем сила страгивания приложена к первому и второму концам вдоль упомянутой оси удлинения, для обеспечения соответствующего движения второго конца так, что первый и второй концы выполнены так, что переменная длина изменяется от свободной длины, в соответствии с внешней силой, которая приложена к первому и второму концам вдоль оси удлинения, которая равна или больше, чем сила страгивания, для упомянутого преодоление пилотом действия автоматического управления; и
изолятор циклической вибрации, который съемно установленный на упомянутом валу элемента привода, для совместного вращения вместе с ним, и соединенный со вторым концом соединения с ограничением силы, таким образом, что упомянутая циклическая вибрация подключается к изолятору циклической вибрации через соединение с ограничением силы, и изолятор циклической вибрации выполнен с возможностью проявлять резонансную частоту, которая, по меньшей мере, приблизительно соответствуют частоте циклической вибрации для циклической вибрации, для обеспечения движения второго конца соединения с ограничением силы относительно вала элемента привода на частоте циклической вибрации, при изоляции вала элемента привода от частоты циклической вибрации и для передачи выходного вращения вала элемента привода ниже резонансной частоты в соединение с ограничением силы для передачи в систему управления циклическим шагом.
Реферат
Изобретение относится к области авиации, в частности к системам управления летательными аппаратами. Элемент привода автопилота включает в себя первый и второй электродвигатели, содержащие вращающиеся выходные валы таким образом, что любой один или оба из электродвигателей могут приводить в движение выходной вал элемента привода. Кожух основного модуля автопилота установлен в вертолете рядом с управлением циклическим шагом, и в нем размещены элементы привода и электронное устройство автопилота. Изолятор циклической вибрации установлен на валу элемента привода для одновременного вращения и соединен с управлением циклическим шагом для аттенюации частоты циклической вибрации на валу элемента привода. Соединение с ограничением силы включает в себя первый и второй концы и переменную длину между ними. Соединение с ограничением силы имеет длину в свободном состоянии, когда сила приложена меньше, чем сила страгивания, и переменная длина изменяется, когда приложенная сила превышает силу страгивания, обеспечивая для пилота возможность преодоления действия автоматического управления. Обеспечивается постоянный контроль управления легкого вертолета, уменьшение времени установки и общего веса автопилота. 13 н. и 27 з.п. ф-лы, 18 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и система предотвращения столкновений летательного аппарата с наземными препятствиями
Комментарии