Способ и система предотвращения столкновений летательного аппарата с наземными препятствиями - RU2369907C2
Код документа: RU2369907C2
Чертежи



Описание
Настоящее изобретение относится к способу и системе предотвращения столкновений летательного аппарата с наземными препятствиями.
Известно, что многие летательные аппараты, в частности, гражданские транспортные летательные аппараты, оборудованы устройством предупреждения столкновения, дающим возможность передавать сигнал предупреждения при наличии риска столкновения летательного аппарата с наземными препятствиями. Что касается устройства предупреждения столкновения, то это может быть, в частности, устройство TAWS (система предупреждения столкновения с наземными препятствиями) и, особенно, типа EGPWS (усовершенствованная система предупреждения опасного сближения с землей) или типа GCAS (система предотвращения столкновения с землей).
Когда такое устройство предупреждения столкновения передает сигнал предупреждения, он обычно доводится до пилота, чтобы тот предпринял все действия, в частности, пилотирование летательного аппарата вручную, чтобы избежать столкновения с наземным препятствием.
Патент США 4924401 предлагает решение, имеющее целью автоматический уход от столкновения летательного аппарата с наземными препятствиями. Это решение состоит в определении минимальной высоты, ниже которой летательный аппарат не должен опускаться, и в автоматическом пилотировании летательного аппарата с помощью автопилота, когда эта минимальная высота проходится при снижении, так, чтобы затем автоматически дать команду летательному аппарату подняться и, тем самым, предотвратить любое столкновение с наземными препятствиями.
Однако это известное решение предпочтительно применимо к случаю, когда пилот находится без сознания, пока летательный аппарат пикирует. Из-за этого оно имеет тот недостаток, что будет действовать на очень позднем участке траектории летательного аппарата, и действие, требуемое на этом участке траектории, конечно, тем больше, чем позднее оно предпринимается. Это также относится, например, к большому пассажирскому летательному аппарату, где это известное решение вызывает неудобную ситуацию или даже потенциальную опасность для пассажиров. Кроме того, из-за такого позднего воздействия риск того, что воздействие на траекторию не сможет защитить летательный аппарат от столкновения с наземным препятствием, также велик.
Задача настоящего изобретения состоит в том, чтобы преодолеть эти недостатки. Это относится к особенно эффективному способу предотвращения столкновения летательного аппарата с наземными препятствиями.
Для решения этой задачи, согласно изобретению, упомянутый способ, в соответствии с которым используется устройство предупреждения столкновения, который контролирует полет летательного аппарата по отношению к окружающей местности и который способен передавать сигнал предупреждения, когда существует риск столкновения между летательным аппаратом и рельефом местности, сохраняя его текущие летные характеристики (скорость, наклон, и т.д.), примечателен тем, что когда упомянутое устройство предупреждения столкновения передает сигнал предупреждения, автоматически:
А/ определяется команда подъема с оптимальным углом наклона летательного аппарата;
В/ проверяется, достаточен ли первый набор высоты (который используется при упомянутом рельефе летательным аппаратом путем применения к нему упомянутой команды подъема с оптимальным углом наклона так, чтобы сохранить текущий курс), чтобы уйти от упомянутого рельефа местности; и
С/ по результатам этой проверки:
a) если упомянутый первый набор высоты достаточен, чтобы уйти от упомянутого рельефа, упомянутая команда подъема с оптимальным углом наклона применяется к летательному аппарату вместе с командой сохранения текущего курса; и
b) если упомянутый первый набор высоты недостаточен, чтобы уйти от упомянутого рельефа, выполняется поиск, чтобы увидеть, имеется ли, по меньшей мере, одно значение изменения курса, для которого второй набор высоты, который используется для рельефа летательным аппаратом (при применении к нему команды подъема с оптимальным углом наклона), достаточен, чтобы уйти от упомянутого рельефа, и если это так:
а) то выбирается одно из упомянутых значений изменения курса, делающее возможным уйти от рельефа местности; и
R) то к летательному аппарату применяется определенная команда подъема, которая достаточна, чтобы уйти от рельефа местности, и которая соответствует значению изменения курса, выбранному таким образом (и которая, следовательно, создает изменение курса летательного аппарата).
Способ, соответствующий изобретению, имеет то преимущество, что воздействие на траекторию летательного аппарата происходит, как только обнаруживается риск столкновения с наземным препятствием, и это воздействие выполняется автоматически, то есть без вмешательства пилота. Таким образом, когда сигнал предупреждения передан, автоматическое действие предпринимается так, чтобы улучшить ситуацию для летательного аппарата по отношению к наземному препятствию, применяя команду подъема, которая обычно является командой подъема с оптимальным углом наклона (в отношении характеристик летательного аппарата), как описано ниже.
Чтобы это сделать согласно изобретению:
если такое действие достаточно, чтобы уйти от рельефа местности, то к летательному аппарату просто применяется команда подъема с оптимальным углом наклона без изменения курса, которая делает возможным выполнить упрощенный маневр предотвращения столкновения с наземными препятствиями; и
если вышеупомянутый упрощенный маневр недостаточен, чтобы уйти от рельефа местности, что может произойти при некоторых обстоятельствах (очень высокий рельеф и т.д.), курс летательного аппарата изменяется, чтобы направить летательный аппарат в направлении, в котором рельеф местности не слишком высок, и затем к нему просто применяется конкретная команда подъема, которая достаточна, чтобы уйти от рельефа местности в этом направлении.
Таким образом, благодаря изобретению, в принципе, существует возможность уйти от рельефа местности, располагающегося непосредственно перед летательным аппаратом.
В контексте настоящего изобретения:
"угол наклона" означает как фактический угол наклона, так и угол пространственного положения летательного аппарата; и
"курс" означает как фактический курс, так и маршрут летательного аппарата.
Кроме того, в контексте настоящего изобретения, команда подъема с оптимальным углом наклона определяется с учетом связанной с ней команды управления силой тяги, чтобы иметь возможность получить максимальный угол наклона. Поскольку максимальный угол наклона, соответствующий текущему тяговому усилию летательного аппарата, не обязательно должен быть наивысшим, определяется команда управления тяговым усилием, для которого максимальный угол наклона является наивысшим из возможных.
В первом упрощенном варианте осуществления упомянутая конкретная команда подъема, которая применяется к летательному аппарату на этапе С.b.β, соответствует команде подъема с оптимальным углом наклона.
Во втором варианте осуществления в качестве конкретной команды подъема (при немаксимальном наклоне) определяется команда, создающая набор высоты, который как необходим, так и достаточен, чтобы уйти от упомянутого рельефа. В этом втором варианте осуществления способ предпочтительно начинается с определения значения курса (или маршрута), делающего возможным минимизировать отклонение летательного аппарата от маршрута, затем определяется команда подъема (при немаксимальном угле наклона), делающая возможным уход от рельефа местности, в то же время минимизируя угол наклона при подъеме (комфорт для пассажиров). Этот второй вариант осуществления поэтому делает возможным повысить комфорт для пассажиров (из-за низкого угла наклона и малого ускорения), не нанося ущерб безопасности летательного аппарата, поскольку набор высоты достаточен, чтобы уйти от упомянутого рельефа местности. Этот второй вариант осуществления применяется, конечно, исключительно в случае, когда набор высоты, необходимый для ухода от рельефа местности, меньше, чем набор высоты, получающийся при применении к летательному аппарату команды подъема с оптимальным углом наклона, поскольку, если это не так, то применяется последняя команда подъема.
Кроме того, конкретная команда подъема, достаточного для ухода от рельефа местности, предпочтительно рассчитывается, учитывая запас высоты относительно такого рельефа местности (запас безопасности).
Кроме того, на этапе С.b.α предпочтительно выбирается (из числа всех найденных значений изменения курса) самое малое по абсолютному значению значение изменения курса, которое делает возможным отклонить летательный аппарат от его текущего курса настолько мало, насколько возможно, то есть от первоначально прогнозированной траектории бокового полета.
В контексте настоящего изобретения, конечно, возможно предусмотреть другие варианты выбора значения изменения курса, используемые на этапе С.b.α. В частности:
в первом варианте выбирается значение изменения курса, которое соответствует самому низкому рельефу местности и которое располагается в диапазоне изменения выбранного курса, определенном с любой стороны текущего курса летательного аппарата;
во втором варианте выбирается значение изменения курса, для которого угол крена, необходимый для соответствующего изменения курса, по абсолютному значению меньше заранее определенного значения, например, меньше 45°, чтобы не ухудшать слишком сильно характеристику подъема летательного аппарата (максимальный возможный угол наклона).
В конкретном варианте осуществления на этапе С.b.β в первую очередь применяется упомянутая конкретная команда подъема, затем применяется упомянутая команда курса, создающая изменение курса. Это делает возможным использовать команду подъема как можно раньше и поэтому максимизировать набор высоты, получающийся для рельефа местности.
Кроме того, в конкретном варианте осуществления, когда упомянутое устройство предупреждения столкновения передает сигнал предупреждения, аэродинамическая конфигурация летательного аппарата изменяется таким образом, чтобы увеличить набор высоты над рельефом местности, и на этапе А определяется команда подъема с оптимальным углом наклона, учитывая новую аэродинамическую конфигурацию летательного аппарата (в результате такого изменения). Этот конкретный вариант осуществления делает возможным увеличить набор высоты, полученный для рельефа местности. Этот вариант осуществления может, в частности, применяться к летательному аппарату во время подлета к аэропорту, когда шасси выпущены, а так же развернуты предкрылки, закрылки и/или интерцепторы. В этом случае изменение аэродинамической конфигурации иногда состоит просто в убирании этих различных устройств, чтобы получить лучший угол наклона при подъеме. Однако в некоторых ситуациях более выгодно оставить некоторые устройства, по меньшей мере, частично развернутыми (в особенности, предкрылки или закрылки). Фактически аэродинамическая конфигурация летательного аппарата изменяется таким образом, чтобы оптимизировать характеристику подъема летательного аппарата. Изменение аэродинамической конфигурации может быть выполнено автоматически или пилотом (с помощью определенной процедуры).
Полезно, когда команда курсом, создающая изменение курса, применяется на этапе С.b.β, сигнал идентификации передается в положении автоматического пилотирования, чтобы сообщить пилоту о применении этой команды (изменения курса). Для этой цели возможно информировать пилота об упомянутой команде курса и также о команде подъема и включении функции предотвращения столкновения с наземным препятствием.
Кроме того, когда риск столкновения исчезает, летательный аппарат предпочтительно должен вернуться в рабочий диапазон режима полета.
Настоящее изобретение также относится к системе предотвращения столкновений с наземными препятствиями для летательного аппарата.
В соответствии с изобретением система упомянутого типа, содержащая:
устройство предупреждения столкновения, которое контролирует полет летательного аппарата относительно препятствия на окружающей местности и которое способно передать сигнал предупреждения, когда существует риск столкновения между летательным аппаратом и рельефом местности, если будут сохраняться его текущие летные характеристики;
устройство автоматического пилотирования летательного аппарата,
является заслуживающей внимания тем, что упомянутое устройство автоматического пилотирования содержит, по меньшей мере:
первое средство определения команды подъема с оптимальным углом наклона для летательного аппарата;
второе средство для проверки, будет ли первый набор высоты (который получается для летательного аппарата при упомянутом рельефе при применении к нему команды подъема с оптимальным углом наклона с сохранением текущего курса) достаточен, чтобы уйти от упомянутого рельефа местности;
третье средство для выяснения, когда упомянутый первый набор высоты недостаточен, чтобы уйти от упомянутого рельефа местности, если имеется, по меньшей мере, одно значение изменения курса, для которого второй набор высоты, который используется для рельефа местности летательным аппаратом (при применении к нему команды подъема с оптимальным углом наклона), достаточно ли оно, чтобы уйти от упомянутого рельефа местности;
четвертое средство для выбора, если необходимо, одного из упомянутых значений изменения курса, делающих возможным уйти от рельефа местности; и
пятое средство для применения к летательному аппарату команды подъема и команды курса, а именно:
если упомянутый первый набор высоты достаточен, чтобы уйти от упомянутого рельефа местности, упомянутая команда подъема с оптимальным углом наклона вместе с командой сохранения текущего курса;
если упомянутый набор высоты недостаточен, чтобы уйти от упомянутого рельефа местности, конкретная команда подъема, которая достаточна, чтобы уйти от рельефа местности, вместе с командой курса, которая соответствует значению изменения курса, выбранному упомянутым четвертым средством (и которая поэтому создает изменение курса летательного аппарата).
В конкретном варианте осуществления упомянутая система предотвращения столкновений также содержит:
индикаторное средство, автоматически сигнализирующее о применении команды курса, создающей изменение курса, то есть приводящей в результате к боковому предотвращению столкновения с рельефом местности; и/или
средство оптимизации аэродинамической конфигурации.
Кроме того, упомянутая система предотвращения столкновения дополнительно с пользой содержит средство, позволяющее пилоту отключить ее. В этом случае упомянутая система предотвращения столкновения может информировать пилота, как выполнить изменения высоты и курса, необходимые для ухода от рельефа местности (например, посредством указателя высоты и курса, который должен указать высоту и курс, которые должны быть приняты).
Кроме. того, упомянутое устройство автоматического пилотирования с пользой является частью автопилота летательного аппарата.
Прилагаемые чертежи дадут хорошее понимание того, как изобретение может быть осуществлено. На этих чертежах идентичные ссылки обозначают подобные элементы.
Фиг.1 - блок-схема системы, соответствующей изобретению.
Фиг.2-4 - схематические представления различных летных ситуаций, создающие возможность дать хорошее объяснение существенных признаков системы в соответствии с изобретением.
Система 1, соответствующая изобретению и показанная схематически на фиг.1, является системой предупреждения столкновений с наземными препятствиями 2 для летательного аппарата А, в частности, большого транспортного летательного аппарата.
Чтобы это сделать, упомянутая система 1 является системой, содержащей:
обычное устройство 3 предупреждения столкновения, который контролирует полет летательного аппарата относительно окружающей местности 2 и который способен передавать сигнал предупреждения, когда существует риск столкновения между летательным аппаратом и рельефом 4 упомянутой местности 2, если оно сохраняет свои текущие летные характеристики (скорость, наклони т.д.); и устройство 5 автоматического пилотирования летательного аппарата А, которое подключается с помощью соединения 6 к упомянутому устройству 3 предупреждения столкновения.
В отношении упомянутого устройства 3 предупреждения столкновения он может быть, в частности, устройством TAWS (система распознавания и оповещения о наземных препятствиях) и особенно типа EGPWS (улучшенная система предупреждения опасного сближения с землей) или типа GCAS (система предотвращения столкновения с землей).
В соответствии с изобретением упомянутое устройство 5 автоматического пилотирования содержит, по меньшей мере, следующие средства, которые включаются в работу, в частности, когда упомянутое устройство 3 предупреждения столкновения передает сигнал предупреждения:
средство 7 для определения обычным образом команды подъема с оптимальным углом наклона летательного аппарата А при фактических характеристиках упомянутого летательного аппарата А;
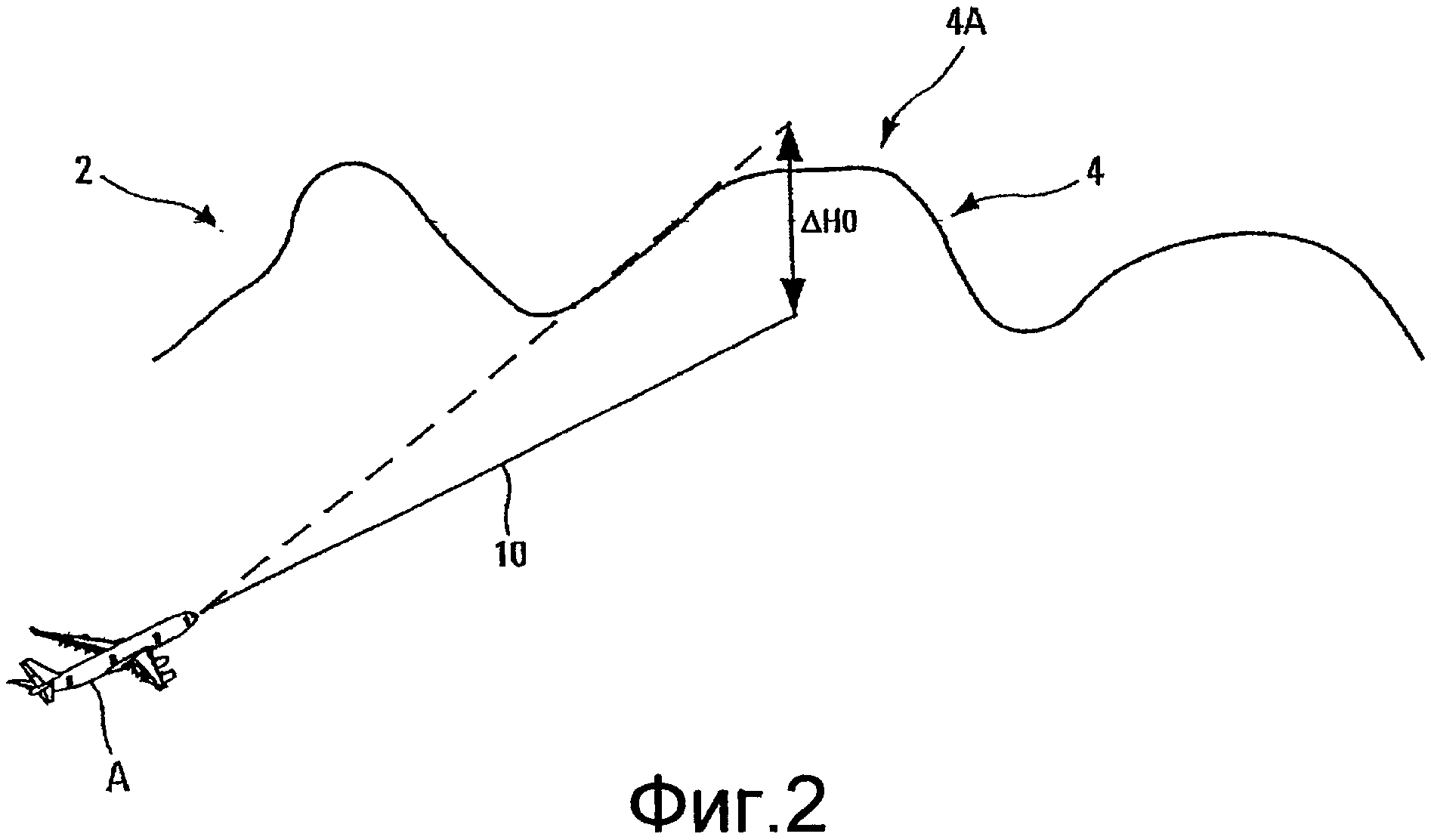
средство 8, которое подключено с помощью соединения 9 к упомянутому средству 7, для проверки, достаточен ли первый набор высоты ΔН0 (который используется летательным аппаратом А для рельефа 4, когда к нему применяется команда подъема с оптимальным углом наклона, определенная упомянутым средством 7, одновременно с командой сохранять текущий курс, показанный линией 10 на фиг.2-4), чтобы уйти от упомянутого рельефа 4 (например, пика 4А в ситуации, показанной на фиг.2);
средство 11, которое подключено с помощью соединения 12 к упомянутому средству 8 для выяснения, когда упомянутый набор высоты ΔН0 недостаточен, чтобы уйти от упомянутого рельефа 4, существует ли, по меньшей мере, одно изменение курса ΔCi, где i - целое число больше или равное 1, для которого соответствующее увеличение высоты полета ΔНi (которое используется летательным аппаратом для рельефа 4, когда к нему применяется команда подъема с оптимальным углом наклона) достаточно, чтобы уйти от упомянутого рельефа 4;
средство 13, которое подключено с помощью соединения 14 к упомянутому средству 11, для выбора способом, описанным ниже, из числа различных изменений курса ΔCi, найденных упомянутым устройством 11, одного из этих значений изменения курса. Когда средство 11 находит только одно единственное возможное значение изменения курса, упомянутое средство 13, конечно, выбирает это единственное значение;
средство 15, которое подключено с помощью соединения 16 к упомянутому средству 13 для определения конкретной команды подъема, как определено ниже, а также команды курса, которая делает возможным изменить курс летательного аппарата А в соответствии со значением изменения курса, выбранным средством 13; и
средство 17, например, переключающее средство, которое управляется средством 8, как представлено соединением 18, показанным штрихпунктирной линией на фиг.1, и чьей целью является передача команд управления подъемом и курсом в соответствии с таким управлением.
Более конкретно, упомянутое средство 17 подключается с помощью соединений 19 и 20 к упомянутым средству 7 и средству 15 соответственно и передает через промежуточное соединение 21 команду управления подъемом и команду управления курсом, которые являются такими, что соответствуют:
если упомянутый набор высоты ΔН0 достаточен, чтобы уйти от упомянутого рельефа 4 местности, упомянутой команде оптимального угла наклона при подъеме, определенного упомянутым средством 7, вместе с командой на сохранение текущего курса летательного аппарата А; и
если упомянутый набор высоты ΔН0 недостаточен, чтобы уйти от упомянутого рельефа 4, командам, определенным упомянутым средством 15, а именно упомянутой конкретной команде подъема, которая достаточна, чтобы уйти от рельефа 4 местности, и упомянутой команде изменения курса, которая соответствует значению изменения курса, выбранному упомянутым устройством 13.
В контексте настоящего изобретения команда оптимального угла наклона при подъеме определяется с учетом сопутствующей команды управления тягой двигателя, чтобы иметь возможность максимизировать угол наклона. Максимальный угол наклона, соответствующий текущей тяге двигателя летательного аппарата А, не обязательно является наивысшим, система 1 определяет команду управления тягой двигателя, для которой максимальный угол наклона является наивысшим из возможных.
Кроме того, в контексте настоящего изобретения набор высоты соответствует разнице между высотой, полученной для рельефа 4, и текущей высотой летательного аппарата А.
Кроме того, команда оптимального угла наклона при подъеме может быть определена следующим образом: вначале летательный аппарат А выполняет подъем с максимальным углом атаки, затем он выполняет подъем при максимальном угле наклона. Предпочтительно, чтобы продолжительность этого начального этапа была выбрана таким способом, чтобы максимизировать высоту, на которой можно уйти от рельефа 4.
Упомянутая система 1 предотвращения столкновения с наземными препятствиями, конечно, также содержит средство 22 (которое может, например, быть введено в состав, по меньшей мере частично, устройства 5 автоматического пилотирования), которое применяет обычным способом к упомянутому летательному аппарату А команду подъема и команду изменения курса, принятые через упомянутое промежуточное соединение 21. Чтобы это сделать, упомянутое средство 22 обычного типа содержит, например, средство вычисления, чтобы определить команды установки поверхности управления на основе упомянутых команд подъемом и изменения курса, и, по меньшей мере, одно средство привода, по меньшей мере, одной поверхности управления, которое принимает эту команду установки поверхности управления и перемещает упомянутую поверхность управления соответствующим способом, чтобы применить упомянутые команды подъема и изменения курса к летательному аппарату А.
В конкретном варианте осуществления упомянутое устройство 5 автоматического пилотирования является частью обычного автопилота летательного аппарата А.
Кроме того, в предпочтительном варианте осуществления упомянутая система 1 предотвращения столкновения с наземными препятствиями дополнительно содержит средство индикации 23, которое присоединяется, например, с помощью соединения 24 к упомянутому устройству 5 автоматического пилотирования и цель которого состоит в том, чтобы предупредить пилота летательного аппарата А, когда к последнему применяется команда изменения курса, определенная средством 15. Эта информация может, например, быть оформлена визуальным способом посредством экрана 25 дисплея, который монтируется в кабине летательного аппарата, и/или звуковым способом, используя обычное средство, которое не показано.
В примере, показанном на фиг.2, набор высоты ΔН0, полученный для рельефа 4, который находится перед летательным аппаратом А в направлении его текущего курса (линия 10), достаточен, чтобы уйти от соответствующего пика 4А упомянутого рельефа 4. В этом примере средство 17 передает на средство 22 команды, приходящие от упомянутого средства 7, а именно команду оптимального угла наклона при подъеме и команду сохранения текущего курса летательного аппарата А. В этом случае предотвращение столкновения с наземным препятствием 2 поэтому выполняется в упрощенной манере, просто посредством осуществления подъема летательного аппарата без изменения его траектории бокового полета (сохранение текущего курса).
С другой стороны, в примерах на фиг.3 и 4 набор высоты ΔН0, полученный для рельефа при применении к летательному аппарату А команды оптимального угла наклона при подъеме с сохранением курса (линия 10), недостаточен, чтобы уйти от соответствующего пика 4В упомянутого рельефа 4. В этом случае средство 17 передает на средство 22 команду подъема и команду изменения курса, которые определяются средством 15.
Как упоминалось ранее, команда управления курсом, которая создается средством 15, имеет целью изменение курса летательного аппарата А в соответствии со значением изменения курса, выбранным средством 13 из множества возможных значений изменения курса ΔCi, найденных средством 11.
В предпочтительном варианте осуществления упомянутое средство 13 выбирает (из числа всех найденных значений изменения курса ΔCi) самое меньшее по абсолютному значению значение изменения курса, которое делает возможным как можно меньше отклонить летательный аппарат А от его текущего курса (линия 10), то есть от первоначально прогнозированной траектории бокового полета. В примере, показанном на фиг.3, средство 11 нашло два значения изменения курса ΔС1 и ΔС2. В соответствии с этим предпочтительным вариантом осуществления средство 13 в этом примере выбирает изменение курса ΔС1, имеющее наименьшее абсолютное значение.
В пределах контекста настоящего изобретения, конечно, возможно предусмотреть другие варианты выбора значения изменения курса, осуществляемые упомянутым средством 13. В частности:
в первом варианте упомянутое средство 13 выбирает значение изменения курса, которое соответствует самому низкому рельефу и которое располагается в пределах заранее определенного диапазона изменения курса (ΔСL1+ΔСL2 на фиг.3), который определяется с любой из сторон текущего курса (линия 10) летательного аппарата А и который ограничивается сегментами 26 и 27. В примере, показанном на фиг.3, часть 4С рельефа 4, которая находится в направлении 28, определяемом изменением курса ΔС2, ниже, чем часть 4D рельефа 4, которая находится в направлении 29, определяемом изменением курса ΔС1, поэтому в этом первом варианте средство 13 выбирает изменение курса ΔС2;
во втором варианте упомянутое средство 13 выбирает значение изменения курса, для которого угол крена, необходимый для соответствующего изменения курса, по абсолютному значению меньше заранее определенного значения, например 45°, чтобы слишком сильно не ухудшать характеристики подъема летательного аппарата А.
Кроме того, упомянутое средство 15 также определяет конкретную команду управления подъемом, которая связана с упомянутой командой изменения курса, определенной ранее описанным способом.
В первом упрощенном варианте осуществления упомянутая конкретная команда подъема, определенная средством 15, просто соответствует команде оптимального угла наклона для подъема. Для той же самой команды оптимального подъема, при, по существу, равном расстоянии от рельефа 4, наборы высоты ΔН2 и ΔН1, полученные при изменении курса, конечно, меньше, чем набор высоты ΔН0, полученный без изменения курса, из-за энергии, используемой летательным аппаратом А для выполнения изменения курса (фиг.3).
Во втором варианте осуществления упомянутое средство 15 определяет, в качестве конкретной команды подъема, команду подъема (при немаксимальном наклоне), которая создает набор высоты ΔHR для рельефа 4, соответствующую набору высоты, который является как необходимым, чтобы уйти от соответствующей части 4D рельефа 4, так и достаточным, учитывая обычные запасы безопасности при регулировании, и меньшим, чем упомянутый набор высоты ΔН1, относящийся к максимальному углу наклона при подъеме, как показано на фиг.4. В этом втором варианте осуществления на первом этапе предпочтительно должно быть определено значение курса (или маршрута), позволяющее минимизировать отклонение маршрута летательного аппарата А, и затем определяется команда подъема (при немаксимальном угле наклона), позволяющая уйти от упомянутого рельефа 4 при минимизации изменения наклона (комфорт для пассажиров).
Этот второй вариант осуществления поэтому делает возможным повысить комфорт для пассажиров (из-за низкого угла наклона и низкого ускорения) без нанесения, однако, ущерба безопасности летательного аппарата А, поскольку соответствующий набор высоты ΔHR достаточен, чтобы уйти от рельефа 4 (часть 4D). Этот второй вариант осуществления, конечно, применяется исключительно в случае, когда набор высоты, необходимый для ухода от рельефа местности, меньше, чем набор высоты ΔН1, полученный при применении к летательному аппарату А команды оптимального угла наклона для подъема.
Кроме того, в конкретном варианте осуществления упомянутое устройство 5 автоматического пилотирования (или упомянутое средство 22) применяет к летательному аппарату A, прежде всего, упомянутую конкретную команду подъема и затем упомянутую команду изменения курса, создающую изменение курса. Это делает возможным использовать команду подъема как можно раньше и поэтому максимизировать набор высоты, полученный для рельефа 4.
Кроме того, в конкретном варианте осуществления, когда упомянутое устройство 3 предупреждения столкновения передает сигнал предупреждения, система 1 изменяет аэродинамическую конфигурацию летательного аппарата А таким образом, чтобы увеличить набор высоты для рельефа 4, и средство 7 определяет команду оптимального угла наклона при подъеме, учитывая новую аэродинамическую конфигурацию летательного аппарата А (в результате такой модификации). Этот конкретный вариант осуществления делает возможным увеличить набор высоты, полученный для рельефа 4. Этот вариант осуществления может, в частности, быть применен к летательному аппарату во время подхода к аэропорту, когда шасси, предкрылки, закрылки и/или интерцепторы летательного аппарата развернуты. В этом случае модификация аэродинамической конфигурации иногда состоит просто в убирании этих различных элементов (шасси, предкрылки, закрылки, интерцепторы), чтобы получить более высокий угол наклона при подъеме. Однако в некоторых ситуациях более выгодно оставить некоторые элементы, по меньшей мере, частично развернутыми (в частности, предкрылки или закрылки). Фактически аэродинамическая конфигурация летательного аппарата изменяется таким способом, чтобы оптимизировать характеристику подъема упомянутого летательного аппарата А. Модификация аэродинамической конфигурации может быть выполнена либо автоматически, либо пилотом (в соответствии с определенной процедурой).
Система 1 предотвращения столкновений с наземными препятствиями, соответствующая существующему изобретению, действует на маршруте полета летательного аппарата А, как только обнаружен риск столкновения с рельефом 4 местности 2, и это действие выполняется автоматически, то есть без вмешательства пилота. Таким образом, как только устройством 3 предупреждения столкновения передан сигнал предупреждения, упомянутая система 1 действует таким образом, чтобы улучшить положение летательного аппарата А по отношению к местности 2, применяя к нему команду подъема, обычно команду подъема с оптимальным углом наклона (в отношении характеристики летательного аппарата А).
Чтобы сделать это, в соответствии с изобретением:
если такое действие достаточно, чтобы уйти от упомянутого рельефа 4, система 1 просто применяет к летательному аппарату А команду подъема с оптимальным углом наклона без изменения его курса, что делает возможным выполнить упрощенный маневр предотвращения столкновения (фиг.2); и
если вышеупомянутый упрощенный маневр недостаточен, чтобы уйти от упомянутого рельефа 4, что может случиться при некоторых обстоятельствах (рельеф 4 местности очень высокий и т.д.), система 1 изменяет курс летательного аппарата А, чтобы повернуть его в направлении, в котором упомянутый рельеф 4 не слишком высок, и применяет к нему конкретную команду подъема, которая, по меньшей мере, достаточна, чтобы уйти от рельефа 4 в этом направлении (фиг.3 и 4).
Следовательно, система 1, соответствующая изобретению, в принципе, делает возможным для летательного аппарата уйти от любого рельефа 4, который находится перед ним.
Следует заметить, что при выходе из конфликта (исчезновение сигнала предупреждения) упомянутая система 1 предпочтительно возвращает летательный аппарат А в рабочий диапазон режимов полета.
Кроме того, упомянутая система 1 дополнительно содержит средство (не показано), дающее пилоту возможность отказаться от нее. В этом случае упомянутая система 1 может информировать пилота, как выполнить изменения высоты и курса, необходимые, чтобы уйти от рельефа 4 (например, посредством обычного указателя высоты и курса, указывающего высоту и курс, которые следует принять).
Реферат
Группа изобретений относится к авиации. Система предотвращения столкновений с наземными препятствиями содержит сигнализатор угрозы столкновения и устройство автоматического пилотирования. Последнее включает в себя средство для определения команды оптимального угла наклона при подъеме для летательного аппарата, средство для проверки достаточности для ухода от рельефа первого набора высоты при применении команды оптимального угла наклона, средство для определения существования, по меньшей мере, одного значения изменения курса, для которого соответствующий набор высоты достаточен, чтобы уйти от рельефа местности. В состав устройства автоматического пилотирования входит также средство для применения к летательному аппарату команды оптимального угла наклона при подъеме вместе с командой сохранения текущего курса, если первый набор высоты достаточен, и конкретной команды подъема, достаточной для ухода от рельефа вместе с командой изменения курса, соответствующей выбранному значению изменения курса, если первый набор высоты недостаточен. Группа изобретений позволяет повысить эффективность предотвращения столкновений летательного аппарата с наземными препятствиями. 3 н. и 13 з.п. ф-лы, 4 ил.
Формула
используется устройство (3) предупреждения столкновения, контролирующее полет летательного аппарата (А) по отношению к окружающей местности (2) и которое способно передавать сигнал предупреждения при наличии риска столкновения между летательным аппаратом (А) и рельефом (4) местности (2), поддерживая его фактические летные характеристики,
когда упомянутое устройство (3) предупреждения столкновения передает сигнал предупреждения, автоматически:
А/ определяют команду подъема с оптимальным углом наклона для летательного аппарата (А),
В/ проверяют, достаточен ли для ухода от упомянутого рельефа (4) первый набор высоты (ΔН0), который достигается для упомянутого рельефа (4) летательным аппаратом (А) при применении к нему упомянутой команды подъема с оптимальным углом наклона вместе с командой поддержания текущего курса, и
С/ в соответствии с этой проверкой, если упомянутый первый набор высоты (ΔН0) недостаточен, чтобы уйти от упомянутого рельефа (4), выполняют поиск на предмет того, имеется ли, по меньшей мере, одно значение изменения курса (ΔС1, ΔС2), для которого второй набор высоты (ΔН1, ΔН2), который достигается летательным аппаратом (А) для рельефа (4) при применении к нему команды подъема с оптимальным углом наклона, достаточен, чтобы уйти от упомянутого рельефа (4), в котором на этапе С/:
a) если упомянутый первый набор высоты (ΔН0) достаточен, чтобы уйти от упомянутого рельефа (4), упомянутая команда подъема с оптимальным углом наклона автоматически применяется к летательному аппарату вместе с командой на сохранение текущего курса, и
b) если упомянутый первый набор высоты (ΔН0) недостаточен, чтобы уйти от упомянутого рельефа (4), и если дополнительно существует, по меньшей мере, одно значение изменения курса (ΔС1, ΔС2), для которого второй набор высоты (ΔН1, ΔН2), который достигается летательным аппаратом (А) для рельефа (4) при применении к нему команды подъема с оптимальным углом наклона, достаточен, чтобы уйти от упомянутого рельефа (4):
α) одно из упомянутых значений изменения курса (ΔС1, ΔС2), создающее возможность ухода от рельефа (4), выбирается автоматически, и
β) конкретная команда подъема, которая достаточна, чтобы уйти от рельефа (4), применяется к летательному аппарату (А) автоматически вместе с командой курса, которая соответствует значению изменения курса, выбранного таким образом.
устройство (3) предупреждения столкновения, которое контролирует полет летательного аппарата (А) в отношении окружающей местности (2) и которое способно передавать сигнал предупреждения, когда существует риск столкновения между летательным аппаратом (А) и рельефом (4) местности (2), если сохранять его фактические летные характеристики, и
устройство (5) автоматического пилотирования летательного аппарата (А), содержащее, по меньшей мере:
первое средство (7) для определения команды подъема с оптимальным углом наклона для летательного аппарата (А);
второе средство (12) для проверки того, достаточен ли для ухода от рельефа (4) первый набор высоты (ΔН0), который достигается летательным аппаратом (А) для упомянутого рельефа (4) при применении к нему упомянутой команды подъема с оптимальным углом наклона с сохранением текущего курса;
третье средство (11) для выяснения, когда упомянутый первый набор высоты (ΔН0) недостаточен, чтобы уйти от упомянутого рельефа (4), того имеется ли, по меньшей мере, одно значение изменения курса (ΔС1, ΔС2), для которого второй набор высоты (ΔН1, ΔН2), который достигается для рельефа летательным аппаратом (А) при применении к нему команды подъема с оптимальным углом наклона, достаточен, чтобы уйти от упомянутого рельефа (4),
причем упомянутое устройство (5) автоматического пилотирования дополнительно содержит:
четвертое средство (13) для автоматического выбора, если необходимо, одного из упомянутых значений изменения курса (ΔС1, ΔС2), дающих возможность уйти от рельефа (4), и
пятое средство (17, 22) для автоматического применения к летательному аппарату (А) команды подъема и команды курса, а именно:
если упомянутый первый набор высоты (ΔН0) достаточен, чтобы уйти от упомянутого рельефа (4), упомянутой команды подъема с оптимальным углом наклона вместе с командой сохранения текущего курса, и
если упомянутый набор высоты (ΔН0) недостаточен, чтобы уйти от упомянутого рельефа (4), конкретной команды подъема, которая достаточна для ухода от рельефа (4), вместе с командой курса, которая соответствует значению изменения курса, выбранному упомянутым четвертым средством (13).
Документы, цитированные в отчёте о поиске
Способ и устройство для предотвращения столкновения с землей летательного аппарата с усовершенствованной системой визуализации
Комментарии