Способ и устройство управления приведением в движение - RU2702931C1
Код документа: RU2702931C1
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления приведением в движение и к устройству управления приведением в движение.
Уровень техники
Известно, что предусмотрено устройство помощи при вождении транспортного средства, которое распознает зону вождения из левой и правой разделительных линий, размещаемых вдоль дороги, по которой движется транспортное средство, и управляет, по меньшей мере, одним из рулевого управления и торможения транспортного средства таким образом, что транспортное средство может двигаться без отклонения от зоны вождения (см. патентный документ 1). Если интервал между разделительными линиями расширяется до степени, непригодной для того, чтобы задавать зону вождения, патентный документ 1 задает, в качестве опорной, одну из левой и правой разделительных линий, которая идет вдоль запланированной проезжей дороги транспортного средства, и распознает виртуальную зону вождения (зону вождения).
Список библиографических ссылок
Патентные документы
Патентный документ 1. Публикация не прошедшей экспертизу заявки на патент Японии номер 2009-214786
Сущность изобретения
Задачи, решаемые изобретением
Управление удержанием на полосе движения используется не только для сохранения зоны вождения, но также и, в некоторых случаях, для поддержания предписанной позиции, например, центральной позиции относительно разделительных линий полосы движения. В таком случае, изменение интервала между разделительными линиями приводит к изменению предписанной позиции относительно разделительных линий полосы движения. Если интервал между разделительными линиями изменяется, и, если управление удержанием на полосе движения выполняется с величиной регулярного управления, поперечная позиция рассматриваемого транспортного средства будет дестабилизироваться, что вызывает у водителя странное ощущение.
С учетом вышеуказанной проблемы, задача настоящего изобретения заключается в том, чтобы предоставлять способ управления приведением в движение и устройство управления приведением в движение, которые уменьшают странное ощущение, возникающее у водителя, когда ширина полосы движения изменяется.
Средство для решения задач
Согласно аспекту настоящего изобретения, способ управления приведением в движение управляет величиной управления приведением в движение рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство может занимать предписанную позицию относительно разделительных линий полосы движения, в которой движется рассматриваемое транспортное средство, и уменьшает величину управления приведением в движение, применяемую, когда поперечная позиция одной из разделительных линий, вдоль которых движется рассматриваемое транспортное средство, перемещается в другом направлении относительно поперечной позиции другой разделительной линии, до величины, меньшей величины управления приведением в движение, применяемой, когда поперечные позиции обеих разделительных линий движутся в идентичном направлении.
Преимущества изобретения
Настоящее изобретение имеет возможность предоставлять способ управления приведением в движение и устройство управления приведением в движение, которые уменьшают странное ощущение, возникающее у водителя, когда ширина полосы движения изменяется.
Краткое описание чертежей
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы 1 управления приведением в движение согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей пример операции обработки системы управления приведением в движение по фиг. 1.
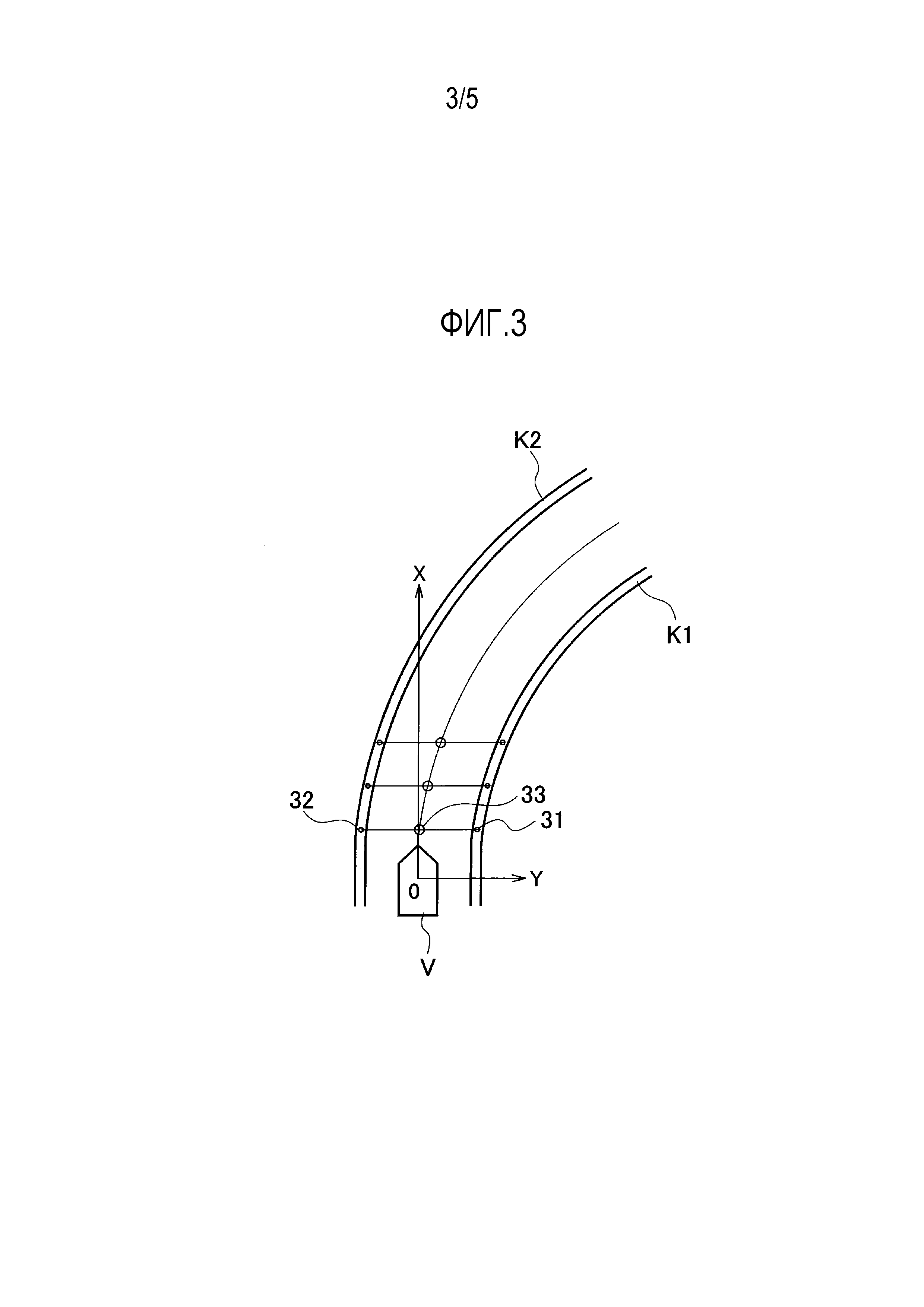
Фиг. 3 является видом сверху, иллюстрирующим окружение первого примера, что полоса движения впереди рассматриваемого транспортного средства V изгибается вправо.
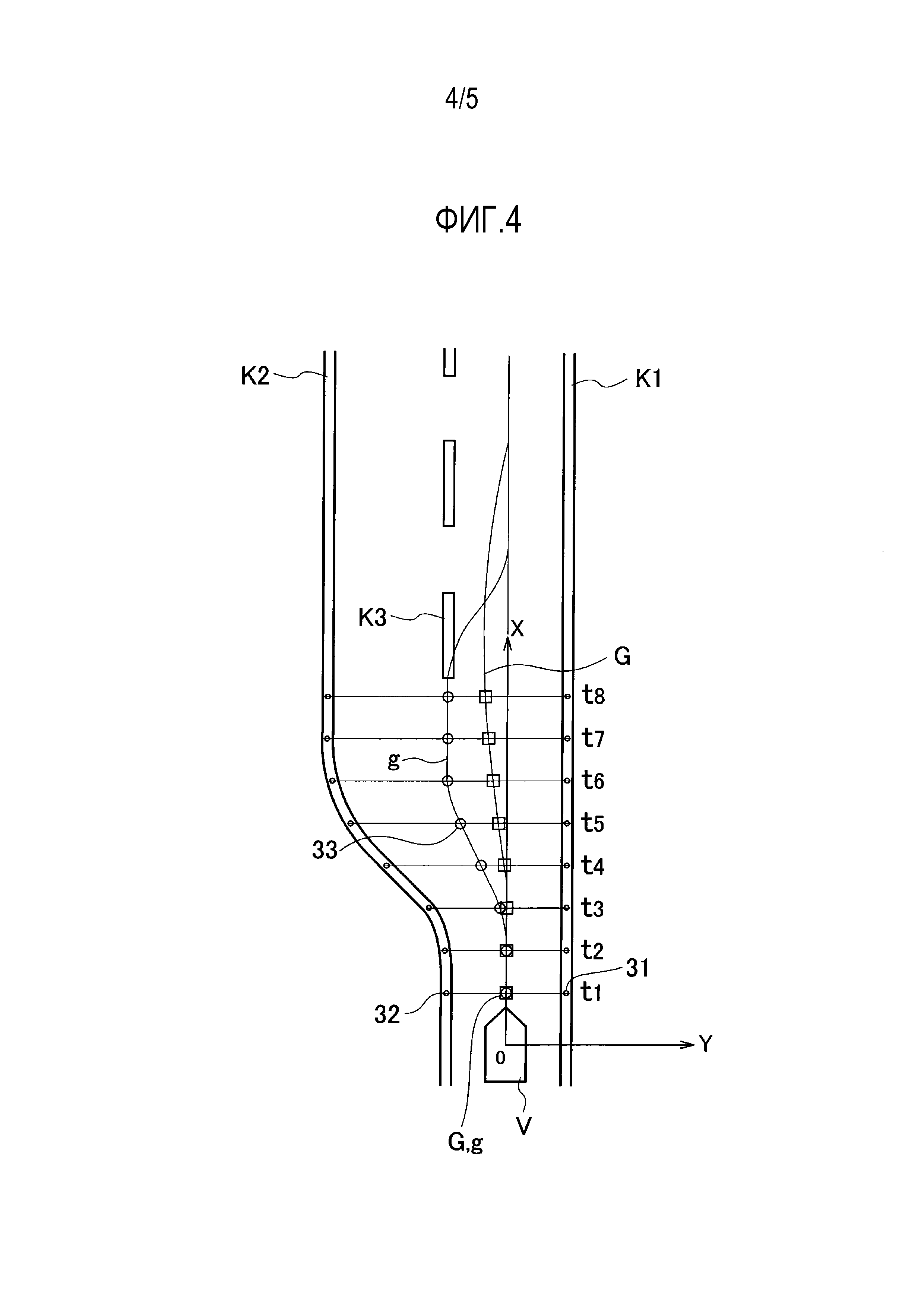
Фиг. 4 является видом сверху, иллюстрирующим окружение второго примера, в котором ширина полосы движения впереди рассматриваемого транспортного средства V увеличивается.
Фиг. 5A является видом сверху, иллюстрирующим окружение третьего примера, в котором ширина полосы движения впереди рассматриваемого транспортного средства V уменьшается.
Фиг. 5B является графиком, иллюстрирующим временное изменение координаты Y рассматриваемого транспортного средства V вдоль пути G движения по фиг. 5A.
Режим осуществления изобретения
Со ссылкой на чертежи, в дальнейшем поясняется вариант осуществления настоящего изобретения. Чертежи описывают идентичные части с использованием идентичных ссылок с номерами, чтобы опускать пояснение.
Со ссылкой на фиг. 1, в дальнейшем поясняется конфигурация системы 1 управления приведением в движение согласно варианту осуществления настоящего изобретения. Система 1 управления приведением в движение включает в себя контроллер 3 приведения в движение транспортного средства, контроллер 5 двигателя, камеру 7 переднего вида, модуль 9 связи, приемное GPS-устройство 11, передний радар 15, датчик 17 скорости транспортного средства и переключатель 18 смены режима помощи при вождении. Дополнительно, система 1 управления приведением в движение включает в себя контроллер 19 помощи при вождении, дисплей 21, динамик 23 и актуатор (исполнительный механизм) 25 рулевого управления. Система 1 управления приведением в движение монтируется на рассматриваемом транспортном средстве, и рассматриваемое транспортное средство содержит такую систему, как активная система автоматического поддержания скорости, которая управляет рассматриваемым транспортным средством таким образом, что оно едет за едущим впереди транспортным средством, находящимся впереди рассматриваемого транспортного средства.
Контроллер 3 приведения в движение транспортного средства включает в себя системы, выполненные с возможностью управлять приведением в движение транспортного средства, такие как антиблокировочная тормозная система, система регулирования тяги и система управления динамикой транспортного средства. Контроллер 5 двигателя представляет собой контроллер для того, чтобы управлять двигателем. Камера 7 переднего вида фотографирует область впереди рассматриваемого транспортного средства и получает изображение, в котором едущее впереди транспортное средство фотографируется. Изображение, сфотографированное с помощью камеры 7 переднего вида, используется для того, чтобы получать такую информацию, как расстояние между транспортными средствами и относительная скорость относительно едущего впереди транспортного средства и поперечная позиция едущего впереди транспортного средства относительно рассматриваемого транспортного средства или разделительной линии. Модуль 9 связи отправляет и принимает услуги обмена информацией с использованием связи между транспортным средством и дорожной инфраструктурой и сотовой сети мобильного телефона. Приемное GPS-устройство 11 принимает информацию широты, долготы и высоты над уровнем моря рассматриваемого транспортного средства из спутника. Передний радар 15 использует миллиметровые волны, чтобы измерять расстояние между транспортными средствами и относительную скорость между едущим впереди транспортным средством и рассматриваемым транспортным средством. Датчик 17 скорости транспортного средства измеряет скорость транспортного средства для рассматриваемого транспортного средства. Переключатель 18 смены режима помощи при вождении представляет собой переключатель, чтобы изменять режим автоматизированного вождения, который управляет вождением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство сохраняет предписанную позицию относительно разделительных линий полосы движения, в которой движется рассматриваемое транспортное средство, и режим вождения вручную, который не управляет вождением рассматриваемого транспортного средства, между собой. Переключатель 18 управляется водителем рассматриваемого транспортного средства.
Контроллер 19 помощи при вождении управляет системой помощи при вождении и системой автоматизированного вождения, такой как адаптивная система автоматического поддержания скорости, экстренное торможение и автоудерживаемое торможение. Также можно использовать систему, которая добавляет функцию управления рулением в адаптивную систему автоматического поддержания скорости. Контроллер 19 помощи при вождении использует камеру 7 переднего вида, передний радар 15 и т.п., для того, чтобы обнаруживать то, имеется или нет едущее впереди транспортное средство, разделительные линии (обнаружение полосы движения), расстояние между транспортными средствами и поперечную позицию едущего впереди транспортного средства относительно рассматриваемого транспортного средства или разделительных линий, и отправляет инструкции в контроллер 5 двигателя или актуатор 25 рулевого управления, за счет этого управляя вождением рассматриваемого транспортного средства, включая ускорение, замедление и руление. Если отсутствуют едущие впереди транспортные средства, контроллер 19 помощи при вождении проводит управление скоростью транспортного средства таким образом, чтобы двигаться посредством сохранения постоянной скорости, и, если имеется едущее впереди транспортное средство, управление поддержанием расстояния между транспортными средствами таким образом, чтобы двигаться посредством сохранения постоянного расстояния между транспортными средствами относительно едущего впереди транспортного средства. Если едущее впереди транспортное средство останавливается, рассматриваемое транспортное средство также останавливается и проводит управление остановкой и удерживанием.
Дисплей 21 отображает состояния системы для адаптивной системы автоматического поддержания скорости, экстренного торможения, автоудержания при торможении и т.п. Динамик 23 озвучивает и отображает и аварийные сигналы, предоставленные посредством адаптивной системы автоматического поддержания скорости, экстренного торможения, автоудержания при торможении и т.п. Актуатор 25 рулевого управления отвечает на инструкции из контроллера 19 помощи при вождении и устройства 100 управления приведением в движение, чтобы проводить операцию руления для управления поперечной позицией рассматриваемого транспортного средства.
Устройство 100 управления приведением в движение представляет собой контроллер, интегрированный с контроллером 19 помощи при вождении, и устанавливается в рассматриваемом транспортном средстве. Устройство 100 управления приведением в движение распознает полосу движения, в которой движется рассматриваемое транспортное средство, и управляет вождением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство может занимать предписанную позицию (например, центральную позицию между левой и правой разделительными линиями) относительно разделительных линий полосы движения. Более точно, устройство 100 управления приведением в движение управляет, по меньшей мере, одним из рулевого управления и торможения транспортного средства таким образом, чтобы приводить поперечную позицию рассматриваемого транспортного средства в предписанную позицию относительно разделительных линий полосы движения. В дальнейшем в этом документе, пояснение продолжается в связи с примером, в котором устройство 100 управления приведением в движение передает управляющий сигнал в актуатор 25 рулевого управления, чтобы осуществлять рулевое управление транспортного средства.
Устройство 100 управления приведением в движение имеет возможность переключать режим автоматизированного вождения, чтобы управлять вождением рассматриваемого транспортного средства, и режим вождения вручную, чтобы не управлять вождением рассматриваемого транспортного средства, между собой. Каждый раз, когда переключатель 18 нажимается, устройство 100 управления приведением в движение изменяет режим автоматизированного вождения и режим вождения вручную между собой. Триггер переключения не ограничен работой переключателя 18. Например, если водитель вмешивается в автоматизированное вождение в режиме автоматизированного вождения, устройство 100 управления приведением в движение изменяет режим на режим вождения вручную.
Устройство 100 управления приведением в движение, например, представляет собой микрокомпьютер общего назначения, имеющий CPU (центральный процессор), запоминающее устройство и модуль ввода-вывода. Компьютерная программа (программа управления приведением в движение) для того, чтобы обеспечивать функционирование микрокомпьютера в качестве устройства 100 управления приведением в движение, устанавливается в микрокомпьютере и выполняется в нем. Вследствие этого, микрокомпьютер общего назначения функционирует в качестве устройства 100 управления приведением в движение. Здесь, устройство 100 управления приведением в движение реализовано, в качестве примера, посредством программного обеспечения. Естественно, можно подготавливать специализированные аппаратные средства для выполнения информационных процессов, упомянутых ниже, чтобы конструировать устройство 100 управления приведением в движение. Множество модулей (120, 125, 130), включенных в устройство 100 управления приведением в движение, могут конструироваться с отдельными аппаратными фрагментами. Кроме того, не только устройство 100 управления приведением в движение, но также и каждый из контроллера 3 приведения в движение транспортного средства, контроллера 5 двигателя и контроллера 19 помощи при вождении аналогично могут быть реализованы посредством программного обеспечения или специализированных аппаратных средств. Дополнительно, устройство 100 управления приведением в движение также может использоваться в качестве электронного модуля управления (ECU) для проведения других задач управления транспортного средства.
Устройство 100 управления приведением в движение имеет, в качестве функциональных компонентов, модуль 120 распознавания разделительных линий (схему распознавания разделительных линий), модуль 125 оценки окружения (схему оценки окружения) и модуль 130 управления транспортного средства (схему управления транспортного средства). Функциональные компоненты (120, 125, 130) работают в режиме автоматизированного вождения и не работают в режиме вождения вручную.
Модуль 120 распознавания разделительных линий распознает, из изображения, полученного посредством камеры 7, пару левой и правой разделительных линий, которые задают полосу движения (рассматриваемую полосу движения), в которой движется рассматриваемое транспортное средство.
Модуль 125 оценки окружения вычисляет поперечную позицию (величину смещения) каждой разделительной линии относительно рассматриваемого транспортного средства и отслеживает изменение поперечной позиции (величины смещения). Согласно изменению поперечной позиции (величины смещения), он оценивает состояние (окружение) полосы движения. Например, модуль 125 оценки окружения задает, как проиллюстрировано на фиг. 3, двумерные координаты, причем рассматриваемое транспортное средство V представляет собой центр, направление движения рассматриваемого транспортного средства V представляет собой ось X, и направление ширины транспортного средства для рассматриваемого транспортного средства V представляет собой ось Y. Здесь, направление движения рассматриваемого транспортного средства V задается в качестве положительного направления оси X, а направление ширины транспортного средства вправо для рассматриваемого транспортного средства V - в качестве положительного направления оси Y. Затем координаты X и Y получаются для распознанных точек (31, 32) соответствующих разделительных линий, распознанных посредством модуля 120 распознавания разделительных линий. Модуль 125 оценки окружения имеет возможность распознавать координаты Y распознанных точек (31, 32) в качестве поперечных позиций соответствующих разделительных линий относительно рассматриваемого транспортного средства.
После этого, модуль оценки окружения имеет возможность отслеживать, согласно изменениям координат Y вдоль координат X распознанных точек (31, 32), изменения поперечных позиций (величин смещения) разделительных линий. В качестве первого примера, фиг. 3 иллюстрирует полосу движения, которая изгибается вправо впереди рассматриваемого транспортного средства V. А именно, пару левой и правой разделительных линий, которые задают искривление полосы движения вправо. В этом случае, поперечные позиции обеих разделительных линий движутся в идентичном направлении (в направлении вправо на фиг. 3). Соответственно, если координаты Y (поперечные позиции) распознанных точек (31, 32) изменяются в идентичном направлении (инкрементном направлении или декрементном направлении), модуль 125 оценки окружения имеет возможность распознавать, как проиллюстрировано на фиг. 3, окружение (первый пример), в котором полоса движения впереди рассматриваемого транспортного средства V изгибается вправо или влево.
Второй и третий примеры проиллюстрированы на фиг. 4 и 5A, на которых ширина полосы движения впереди рассматриваемого транспортного средства V увеличивается или уменьшается. В этом случае, поперечная позиция, по меньшей мере, одной из пары левой и правой разделительных линий перемещается внутрь или наружу. Модуль 125 оценки окружения отслеживает то, что абсолютные значения координат Y, по меньшей мере, одной из распознанных точек (31, 32) увеличиваются или уменьшаются.
Подробнее, согласно второму примеру, проиллюстрированному на фиг. 4, ширина полосы движения впереди рассматриваемого транспортного средства V увеличивается. Оно представляет собой окружение, которое может наблюдаться перед разветвлением, например, разветвлением на съезд с шоссе, разветвлением на въезд в пункт взимания платы за проезд шоссе или разветвление на правый или левый поворот около перекрестка. В таком окружении, одна (K2) из пары левой и правой разделительных линий (K1, K2), которые задают полосу движения, перемещается наружу, а другая (правая 31) не перемещается или перемещается также наружу. Соответственно, если абсолютные значения координаты Y (поперечной позиции), по меньшей мере, одной из распознанных точек (31, 32) показывают увеличение, а абсолютные значения другой из них не показывают изменение, модуль 125 оценки окружения распознает, как проиллюстрировано на фиг. 4, окружение (второй пример), в котором ширина полосы движения впереди рассматриваемого транспортного средства V увеличивается.
Согласно третьему примеру, проиллюстрированному на фиг. 5A, ширина полосы движения впереди рассматриваемого транспортного средства V уменьшается. Оно представляет собой окружение, которое может наблюдаться перед скрещением дорог, в котором число полос движения уменьшается, например, около выезда из пункта взимания платы за проезд шоссе или около въезда на автомагистраль. В таком окружении, одна (K2) из пары левой и правой разделительных линий (K1, K2), которые задают полосу движения, перемещается внутрь, а другая не показывает изменение или также перемещается внутрь. Соответственно, если абсолютные значения координаты Y (поперечной позиции), по меньшей мере, одной из распознанных точек (31, 32) показывают уменьшение, а абсолютные значения другой из них не показывают изменение, модуль 125 оценки окружения распознает, как проиллюстрировано на фиг. 5A, окружение (третий пример), в котором ширина полосы движения впереди рассматриваемого транспортного средства V сужается.
Таким образом, модуль 125 оценки окружения имеет возможность отличать, по меньшей мере, три окружения, проиллюстрированные на фиг. 3-5A, друг от друга согласно изменениям координат Y (поперечных позиций) точек (31, 32) на разделительных линиях, распознанных посредством модуля 120 распознавания разделительных линий.
В примере, поясненном выше, модуль 125 оценки окружения отличает три окружения друг от друга. Помимо этого, он может отличать первый пример из окружения, включающего в себя второй и третий примеры. А именно, модуль 125 оценки окружения идентифицирует, если поперечные позиции обеих разделительных линий движутся в идентичном направлении, окружение (первый пример), в котором полоса движения изгибается вправо или влево, и, если поперечная позиция, по меньшей мере, одной из разделительных линий перемещается, окружение (включающее в себя второй и третий примеры), в котором ширина полосы движения изменяется.
Модуль 130 управления транспортного средства управляет движением рассматриваемого транспортного средства на основе информации состояния движения рассматриваемого транспортного средства и окружения, определенного посредством модуля 125 оценки окружения, таким образом, что поперечная позиция рассматриваемого транспортного средства относительно разделительной линии может принимать предписанную позицию. Во-первых, на основе информации состояния движения рассматриваемого транспортного средства, он вычисляет целевое значение угла поворота при рулении, требуемое для приведения поперечной позиции рассматриваемого транспортного средства относительно разделительной линии в предписанную позицию. Модуль 130 управления транспортного средства вычисляет целевое значение крутящего момента поворота при рулении, чтобы заставлять фактический угол поворота при рулении согласовываться с целевым значением угла поворота при рулении. Известна технология управления рулением транспортного средства таким образом, чтобы приводить поперечную позицию рассматриваемого транспортного средства относительно разделительной линии в предписанную позицию, и в силу этого описание такой технологии управления опускается здесь. Модуль 130 управления транспортного средства регулирует значение усиления, на которое умножается целевое значение крутящего момента поворота при рулении, за счет этого регулируя крутящий момент поворота при рулении, фактически выведенный из актуатора 25 рулевого управления. А именно, модуль 130 управления транспортного средства регулирует, с помощью значения усиления, отношение фактического крутящего момента поворота при рулении к целевому значению крутящего момента поворота при рулении. Чем больше увеличивается значение усиления, тем сильнее фактический крутящий момент поворота при рулении приближается к целевому значению крутящего момента поворота при рулении, чтобы увеличивать величину управления рулением в качестве значения, необходимого для управления рассматриваемым транспортным средством в предписанную поперечную позицию относительно разделительной линии. Как результат, чем больше увеличивается значение усиления, тем круче управление рулением выполняется, для того чтобы перемещать поперечную позицию рассматриваемого транспортного средства в предписанную позицию за короткое время.
Модуль 130 управления транспортного средства изменяет значение усиления согласно окружению, определенному посредством модуля 125 оценки окружения, за счет этого изменяя величину управления рулением. Подробнее, модуль 130 управления транспортного средства уменьшает величину управления рулением, применяемая, когда поперечная позиция, по меньшей мере, одной из разделительных линий перемещается внутрь или наружу (когда поперечная позиция маркировки одной полосы движения, вдоль которой движется рассматриваемое транспортное средство, перемещается в другом направлении относительно поперечной позиции другой разделительной линии, например, когда транспортное средство движется по прямой дороге, ширина полосы движения которой увеличивается или уменьшается), до величины, меньшей величины управления рулением, применяемой, когда поперечные позиции обеих разделительных линий движутся в идентичном направлении (например, когда транспортное средство движется в искривленной полосе движения, ширина которой не показывает изменения либо увеличивается или уменьшается). Вследствие этого, величина управления рулением, применяемая, когда окружение изменения ширины полосы движения (включающее в себя второй и третий примеры) идентифицируется, может уменьшаться до величины, меньшей величины управления рулением, применяемой, когда окружение с искривлением полосы движения (первый пример) идентифицируется. Величина управления рулением, применяемая, когда поперечные позиции обоих разделительных линий движутся в идентичном направлении, задается как "величина регулярного управления" и величина управления рулением, когда поперечная позиция, по меньшей мере, одной из разделительных линий перемещается внутрь или наружу, задается как "величина постепенного управления". "Величина постепенного управления" не включает в себя величину управления в нуль.
Когда полоса движения изгибается, как проиллюстрировано на фиг. 3, величина регулярного управления применяется, чтобы проводить управление удержанием на полосе движения. А именно, относительно разделительных линий (K1, K2) полосы движения, руление рассматриваемого транспортного средства управляется таким образом, что рассматриваемое транспортное средство может сохранять предписанную позицию (например, центральную позицию 33 между разделительными линиями). Тем не менее, перед выездом или пунктом взимания платы за проезд шоссе либо около въезда в полосу движения на правый поворот общей дороги, ширина полосы движения увеличивается или уменьшается. Согласно изменению ширины полосы движения, предписанная позиция (центральная позиция 33 между разделительными линиями) рассматриваемого транспортного средства относительно разделительных линий (K1, K2) изменяется.
Например, если ширина полосы движения увеличивается влево, как проиллюстрировано на фиг. 4, центральная позиция 33 между распознанными точками (31, 32) соответствующих разделительных линий значительно перемещается влево. Согласно изменению ширины полосы движения, если "величина регулярного управления" применяется, чтобы проводить управление удержанием на полосе движения, транспортное средство должно двигаться по пути (g) движения, проходящему через центральную позицию 33 распознанных точек (31, 32). Согласно примеру по фиг. 4, транспортное средство едет в правой полосе движения после того, как полоса движения ответвляется, так что сразу после распознавания новой разделительной линии K3, центральная позиция 33 между разделительными линиями значительно колеблется вправо, и путь (g) движения придерживается ее. Таким образом, когда ширина полосы движения увеличивается влево, выполнение управления с "величиной регулярного управления" увеличивает величину перемещения рассматриваемого транспортного средства V в направлении ширины транспортного средства (в направлении по оси Y), чтобы дестабилизировать поперечную позицию рассматриваемого транспортного средства V и вызывать у водителя странное ощущение.
Чтобы разрешать эту проблему, величина управления приведением в движение (величина постепенного управления), применяемая, когда поперечная позиция одной из пары разделительных линий (K1, K2), позиционированных справа и слева от рассматриваемого транспортного средства V, перемещается, задается меньше величины управления приведением в движение (величины регулярного управления), применяемой, когда поперечные позиции обеих из пары разделительных линий (K1, K2) движутся в идентичном направлении. Это приводит к уменьшению величины управления рулением, применяемой, когда интервал между разделительными линиями (K1, K2) полосы движения изменяется. Как результат, рассматриваемое транспортное средство V движется, например, вдоль пути (G) движения, чтобы уменьшать величину перемещения рассматриваемого транспортного средства V в направлении ширины транспортного средства (в направлении по оси Y), стабилизировать поперечную позицию рассматриваемого транспортного средства V и уменьшать странное ощущение, возникающее у водителя. Кроме того, когда ширина полосы движения впереди рассматриваемого транспортного средства V уменьшается, как проиллюстрировано на фиг. 5A, величина управления приведением в движение аналогично уменьшается, чтобы уменьшать странное ощущение, возникающее у водителя.
Когда ширина полосы движения впереди рассматриваемого транспортного средства V уменьшается, как проиллюстрировано на фиг. 5A, руление рассматриваемого транспортного средства управляется до того, как ширина полосы движения уменьшается, таким образом, что поперечная позиция рассматриваемого транспортного средства V может принимать предписанную позицию (центральную позицию 34 разделительных линий) относительно разделительных линий (K1, K2) в суженном состоянии (t14). Например, устройство 100 управления приведением в движение распознает во время t1 разделительные линии (K1, K2) в суженном состоянии (t14) и идентифицирует окружение (третий пример), в котором ширина полосы движения впереди рассматриваемого транспортного средства V уменьшается. В этом случае, если "величина регулярного управления" применяется, чтобы выполнять управление, поперечная позиция рассматриваемого транспортного средства V должна перемещаться на расстояние (LG), как проиллюстрировано с помощью пути (g) движения, в центральную позицию (34) разделительных линий в суженном состоянии (t14) в течение короткого периода от времени t1 до t3. Это увеличивает скорость перемещения рассматриваемого транспортного средства V в направлении ширины полосы движения (в направлении по оси Y) и вызывает у водителя странное ощущение.
Чтобы разрешать эту проблему, устройство 100 управления приведением в движение уменьшает величину управления приведением в движение (величину постепенного управления), применяемую, когда поперечная позиция одной из пары разделительных линий (K1, K2), позиционированных слева и справа от рассматриваемого транспортного средства V, перемещается, до величины, меньшей величины управления приведением в движение (величины регулярного управления), применяемой, когда поперечные позиции обеих из пары разделительных линий (K1, K2) движутся в идентичном направлении. Это приводит к уменьшению величины управления рулением, применяемой, когда интервал между разделительными линиями (K1, K2) полосы движения изменяется. Как результат, рассматриваемое транспортное средство V движется, например, вдоль пути (G) движения, проиллюстрированного на фиг. 5A, скорость перемещения рассматриваемого транспортного средства V в направлении ширины транспортного средства (в направлении по оси Y) замедляется, поперечная позиция рассматриваемого транспортного средства V стабилизируется, и странное ощущение, возникающее у водителя, уменьшается.
Когда ширина полосы движения впереди рассматриваемого транспортного средства V уменьшается, как проиллюстрировано на фиг. 5A, модуль 130 управления транспортного средства определяет, на основе информации состояния движения рассматриваемого транспортного средства V, то, отклоняется или нет рассматриваемое транспортное средство от полосы движения, если рассматриваемое транспортное средство V поддерживает текущее состояние движения. А именно, он определяет то, отклоняется или нет запланированный путь движения рассматриваемого транспортного средства V, оцененный из состояния руления или состояния на основе угловой скорости относительно вертикальной оси рассматриваемого транспортного средства V, за пределы пары левой и правой разделительных линий (K1, K2), распознанных посредством модуля 120 распознавания разделительных линий. Если определяется то, что рассматриваемое транспортное средство V отклоняется от полосы движения, модуль 130 управления транспортного средства использует "величину регулярного управления", чтобы выполнять управление рулением таким образом, что рассматриваемое транспортное средство V может не отклоняться от полосы движения. После выполнения управления рулением, чтобы сохранять рассматриваемое транспортное средство V в пределах полосы движения, величина управления рулением задается равной "величине постепенного управления". А именно, если поперечная позиция, по меньшей мере, одной из пары разделительных линий (K1, K2) перемещается внутрь, величина управления, необходимая для того, чтобы не отклонять рассматриваемое транспортное средство V от полосы движения, задается больше величины управления рулением, которая должна применяться после этого.
Например, как проиллюстрировано на фиг. 5A и 5B, модуль 130 управления транспортного средства выполняет, между временем t1 и t2, управление рулением, необходимое для того, чтобы не отклонять рассматриваемое транспортное средство от полосы движения, с "величиной регулярного управления". Вследствие этого, за короткий период от времени t1 до t2, поперечная позиция (координата Y) рассматриваемого транспортного средства V может перемещаться на расстояние (L1), которое требуется для того, чтобы не отклонять рассматриваемое транспортное средство V за пределы левой разделительной линии (K2). После этого, т.е. после времени t2, модуль 130 управления транспортного средства выполняет управление удержанием на полосе движения с "величиной постепенного управления" таким образом, что рассматриваемое транспортное средство V может занимать предписанную позицию (центральную позицию 34) относительно разделительных линий (K1, K2) в суженном состоянии (t14). Как результат, рассматриваемое транспортное средство V имеет возможность двигаться вдоль пути (G) движения, проиллюстрированного на фиг. 5A.
Таким образом, величина управления рулением, чтобы не отклоняться от полосы движения, может увеличиваться, и величина руления, применяемая после этого, может уменьшаться. Это приводит к недопущению отклонения от полосы движения и уменьшению странного ощущения, возникающего у водителя.
Со ссылкой на фиг. 2, в дальнейшем поясняется пример операции обработки (способа управления приведением в движение) системы 1 управления приведением в движение по фиг. 1. Блок-схема последовательности операций способа по фиг. 2 начинается, когда рассматриваемое транспортное средство изменяется с режима вождения вручную на режим автоматизированного вождения, и многократно выполняется до тех пор, пока режим автоматизированного вождения не будет изменен на режим вождения вручную.
На этапе S101, камера 7 переднего вида фотографирует область впереди рассматриваемого транспортного средства V и получает изображение, в котором разделительные линии снимаются. Процесс переходит к этапу S103, на котором модуль 120 распознавания разделительных линий распознает, из изображения, полученного посредством камеры 7, пару левой и правой разделительных линий, которые задают полосу движения, в которой движется рассматриваемое транспортное средство V.
Процесс переходит к этапу S105, на котором модуль 125 оценки окружения вычисляет поперечную позицию (величину смещения) каждой разделительной линии относительно рассматриваемого транспортного средства и отслеживает изменение поперечной позиции (величины смещения). После этого, модуль 125 оценки окружения оценивает состояние (окружение) полосы движения согласно изменению поперечной позиции (величины смещения). Сначала, процесс переходит к этапу S107, на котором модуль 125 оценки окружения оценивает то, изгибается либо нет полоса движения впереди рассматриваемого транспортного средства V вправо или влево. Более точно, как проиллюстрировано на фиг. 3, он оценивает то, изменяются или нет координаты Y (поперечные позиции) распознанных точек (31, 32) в идентичном направлении (инкрементном направлении или декрементном направлении).
Если оценивается то, что полоса движения впереди рассматриваемого транспортного средства V изгибается ("Да" на этапе S107), процесс переходит к этапу S109, на котором модуль 130 управления транспортного средства выполняет управление удержанием на полосе движения с "величиной регулярного управления". А именно, как проиллюстрировано на фиг. 3, он осуществляет рулевое управление рассматриваемого транспортного средства V с "величиной регулярного управления" таким образом, что поперечная позиция рассматриваемого транспортного средства V занимает предписанную позицию (центральную позицию 33 разделительных линий) относительно разделительных линий (K1, K2), распознанных на этапе S103. Более точно, модуль 130 управления транспортного средства задает отношение (значение усиления) фактического крутящего момента поворота при рулении к целевому значению крутящего момента поворота при рулении таким образом, что оно превышает предварительно определенное опорное значение.
С другой стороны, если оценивается то, что полоса движения впереди рассматриваемого транспортного средства V не изгибается ("Нет" на этапе S107), процесс переходит к этапу S111, на котором модуль 125 оценки окружения оценивает то, увеличивается или нет ширина полосы движения впереди рассматриваемого транспортного средства V. Более точно, как проиллюстрировано на фиг. 4, он оценивает то, перемещается или нет наружу, по меньшей мере, одна (K2) из левой и правой разделительных линий (K1, K2), которые задают полосу движения.
Если оценивается то, что ширина полосы движения впереди рассматриваемого транспортного средства V увеличивается ("Да" на этапе S111), выполняется этап S113, на котором модуль 130 управления транспортного средства выполняет управление удержанием на полосе движения с "величиной постепенного управления". Более точно, модуль 130 управления транспортного средства задает отношение (значение усиления) фактического крутящего момента поворота при рулении к целевому значению крутящего момента поворота при рулении таким образом, что оно меньше предварительно определенного опорного значения. Как результат, как проиллюстрировано на фиг. 4, рассматриваемое транспортное средство V движется вдоль пути (G) движения. Таким образом, модуль 130 управления транспортного средства уменьшает величину управления приведением в движение, применяемую, когда ширина полосы движения увеличивается, до величины, меньшей величины управления приведением в движение (величины регулярного управления), когда полоса движения изгибается.
С другой стороны, если оценивается то, что ширина полосы движения впереди рассматриваемого транспортного средства V не увеличивается ("Нет" на этапе S111), выполняется этап S115, на котором модуль 125 оценки окружения оценивает то, что ширина полосы движения впереди рассматриваемого транспортного средства V уменьшается. А именно, как проиллюстрировано на фиг. 5A, по меньшей мере, одна (K2) из пары левой и правой разделительных линий (K1, K2), которые задают полосу движения, перемещается внутрь.
Процесс переходит к этапу S117, в котором модуль 130 управления транспортного средства обращается к информации состояния движения рассматриваемого транспортного средства V и оценивает то, отклоняется или нет рассматриваемое транспортное средство V от полосы движения, если состояния движения (состояние ускорения/замедления и состояние руления) рассматриваемого транспортного средства V поддерживаются. Если оценивается то, что рассматриваемое транспортное средство V отклоняется от полосы движения ("Да" на этапе S117), процесс переходит к этапу S119, на котором модуль 130 управления транспортного средства выполняет, с "величиной регулярного управления", управление рулением, необходимое для того, чтобы не отклонять рассматриваемое транспортное средство V от полосы движения.
После того, как управление рулением, необходимое для того, чтобы не отклонять рассматриваемое транспортное средство V от полосы движения, выполняется ("Нет" на этапе S117), процесс переходит к этапу S121, на котором модуль 130 управления транспортного средства выполняет управление удержанием на полосе движения с "величиной постепенного управления", которая меньше "величины регулярного управления". Таким образом, если поперечная позиция, по меньшей мере, одной из пары разделительных линий (K1, K2) перемещается внутрь, величина управления, требуемая для того, чтобы не отклонять рассматриваемое транспортное средство V от полосы движения, увеличивается до величины, большей величины управления рулением, которая применяется после этого.
Как пояснено выше, вариант осуществления предоставляет нижеуказанные преимущества.
Если полоса движения изгибается, модуль 130 управления транспортного средства выполняет управление удержанием на полосе движения с величиной регулярного управления. Тем не менее, перед выездом или пунктом взимания платы за проезд шоссе либо около въезда в полосу движения на правый поворот общей дороги, интервал между разделительными линиями, т.е. ширина полосы движения, будет увеличиваться или уменьшаться. Изменение ширины полосы движения приводит к изменению предварительно определенной позиции (центральной позиции 33) рассматриваемого транспортного средства V относительно разделительных линий (K1, K2). Если управление удержанием на полосе движения выполняется с величиной регулярного управления в ответ на изменение ширины полосы движения, поперечная позиция рассматриваемого транспортного средства V будет становиться нестабильной, что вызывает у водителя странное ощущение. Чтобы разрешать эту проблему, величина управления приведением в движение (величина постепенного управления), применяемая, когда поперечная позиция, по меньшей мере, одной из пары разделительных линий, которые позиционируются слева и справа от рассматриваемого транспортного средства V, перемещается внутрь или наружу (фиг. 4 и 5A), уменьшается до величины, меньшей величины управления приведением в движение (величины регулярного управления), применяемой, когда поперечные позиции обеих из пары разделительных линий движутся в идентичном направлении (фиг. 3). Вследствие этого, величина управления приведением в движение, применяемая, когда интервал между разделительными линиями полосы движения изменяется (фиг. 4 и 5A), становится меньше величины регулярного управления. Как результат, величина перемещения или скорость перемещения рассматриваемого транспортного средства V в направлении ширины полосы движения уменьшается, чтобы стабилизировать поперечную позицию рассматриваемого транспортного средства V и уменьшать странное ощущение, возникающее у водителя.
Если оценивается то, что поперечная позиция, по меньшей мере, одной из разделительных линий перемещается внутрь, и то, что рассматриваемое транспортное средство отклоняется от полосы движения, управление для того, чтобы не отклонять рассматриваемое транспортное средство от полосы движения, выполняется с величиной управления, которая превышает величину постепенного управления. После этого, управление выполняется с величиной постепенного управления. Другими словами, если поперечная позиция, по меньшей мере, одной из пары разделительных линий перемещается внутрь, величина управления, необходимая для того, чтобы не отклонять рассматриваемое транспортное средство от полосы движения, увеличивается до величины, большей величины управления приведением в движение, которая должна применяться после этого (S115-S121). Это не допускает отклонения от полосы движения и уменьшает странное ощущение, возникающее у водителя.
Хотя настоящее изобретение пояснено на основе варианта осуществления, не следует понимать, что пояснение и чертежи, которые составляют часть раскрытия сущности, ограничивают настоящее изобретение. Раскрытие сущности может прояснять, для специалистов в данной области техники, различные замены, альтернативы и варианты применения для настоящего изобретения.
Хотя устройство 100 управления приведением в движение управляет рулением транспортного средства в качестве примера управления приведением в движение, настоящее изобретение не ограничено этим. Например, вместо руления транспортного средства или в дополнение к рулению транспортного средства, оно может независимо управлять тормозной силой левой и правой шин. Например, приложение тормозной силы только к правой/левой шине может поворачивать рассматриваемое транспортное средство вправо/влево.
Функции, упомянутые в вышеописанных вариантах осуществления, могут быть осуществлены с помощью одной или более схем обработки. Схемы обработки включают в себя программируемые модули обработки, к примеру, содержащие электрическую схему модули обработки. Модули обработки включают в себя специализированные интегральные схемы (ASIC), размещаемые с возможностью выполнять функции, упомянутые в вариантах осуществления, и традиционные схемные части.
В связи с действующим в США предписанием, содержимое заявки на патент (Япония) № 2016-134042 (поданной 6 июля 2016 года) полностью содержится в данном документе, чтобы защищать от ошибок перевода или пропусков.
Описание ссылочных обозначений
25 - актуатор рулевого управления
100 - устройство управления приведением в движение
120 - модуль распознавания разделительных линий (схема распознавания разделительных линий)
125 - модуль оценки окружения
130 - модуль управления транспортного средства (схема управления транспортного средства)
V - рассматриваемое транспортное средство
K1, K2 - разделительная линия.
Реферат
Группа изобретений относится к управлению приведением в движение транспортного средства. Устройство, осуществляющее способ управления приведением в движение, содержит схему распознавания разделительных линий, модуль оценки и схему управления транспортного средства. При этом модуль оценки определяет перемещение поперечной позиции одной из разделительных линий. Схема управления управляет величиной управления приведения в движение так, что уменьшает величину управления приведением в движение, применяемую, когда поперечная позиция одной из разделительных линий, вдоль которых движется рассматриваемое транспортное средство, перемещается в другом направлении относительно поперечной позиции другой разделительной линии, до величины, меньшей величины управления приведением в движение, применяемой, когда поперечные позиции обеих разделительных линий движутся в идентичном направлении. Обеспечивается комфортное состояние водителя при изменении ширины полосы. 2 н. и 2 з.п. ф-лы. 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления приведением в движение транспортного средства
Комментарии