Устройство управления приведением в движение транспортного средства - RU2557132C1
Код документа: RU2557132C1
Чертежи






















Описание
Область техники
Настоящее изобретение относится к устройству управления приведением в движение транспортного средства и, в частности, к устройству управления движением транспортного средства, которое выполняет управление траекторией, при котором управляемые колеса управляются таким образом, чтобы заставлять транспортное средство двигаться вдоль целевой траектории (целевой линии движения).
Уровень техники
В качестве одного из устройств управления приведением в движение транспортного средства известно устройство управления приведением в движение транспортного средства, которое управляет управляемыми колесами посредством устройства варьирования угла поворота при рулении, которое называется "системой рулевого управления с переменным передаточным отношением (VGRS)". В таком типе устройства управления приведением в движение дорога указывается посредством анализа изображения впереди транспортного средства, захваченного посредством камеры; целевая траектория задается на основе указанной дороги; и управляемые колеса управляются таким образом, чтобы заставлять транспортное средство двигаться вдоль целевой траектории.
Когда руль, который служит в качестве средства ввода для руления, вынужденно вращается при рулении управляемыми колесами за счет управления траекторией, пассажиры в транспортном средстве испытывают беспокойство. Чтобы разрешать проблему, к настоящему времени известно управление устройством варьирования угла поворота при рулении и механизмом усилителя рулевого управления таким образом, чтобы поддерживать вращение руля максимально возможно небольшим, даже если управляемые колеса управляются за счет управления траекторией.
Тем не менее, пассажиры в транспортном средстве, в котором выполняется управление траекторией, не могут предвидеть изменение направления движения транспортного средства, вызываемое за счет управления траекторией и по этой причине могут испытывать беспокойство и некомфортное ощущение. Например, в случае, если кривизна дороги впереди транспортного средства варьируется, пассажиры могут испытывать беспокойство и некомфортное ощущение в отношении того, будет или нет транспортное средство двигаться с изменением своего направления движения надлежащим образом по дороге. В другом случае, когда впереди транспортного средства присутствует ответвление дороги, пассажиры могут испытывать беспокойство и некомфортное ощущение касательного того, будет или нет транспортное средство изменять направление движения, чтобы выбирать дорогу, по которой они хотят ехать, и проезжать ответвление.
В качестве одного из средств для того, чтобы разрешать проблему, как описано в нижеуказанном Патентном Документе 1, к настоящему моменту предложено оповещать относительно изменения направления движения транспортного средства посредством звука от навигационного модуля или показывать предварительное уведомление в отношении изменения направления движения транспортного средства на дисплее, к примеру, на приборной панели и т.п.
Список библиографических ссылок
Патентный документ 1: Публикация выложенной не прошедшей экспертизу заявки на патент Японии № Heisei 10 (1998) 10-105885
Техническая задача
В случае, если оповещение относительно изменения направления движения транспортного средства выдается посредством звука, пассажиры зачастую не могут распознавать оповещение вследствие того, что не слышат его, и помехи оповещению с помощью аудиофункции не могут быть убраны. С другой стороны, в случае, если предварительное уведомление относительно изменения направления движения транспортного средства показывается на дисплее, достаточно затруднительно распознавать быстро содержимое уведомления относительно изменения направления движения транспортного средства из индикатора на дисплее, и для пассажиров, за исключением водителя, еще более затруднительно самим распознавать предварительное уведомление.
Сущность изобретения
Основная задача настоящего изобретения заключается в том, чтобы выдавать предварительное уведомление относительно изменения направления движения транспортного средства более предпочтительно по сравнению со случаем, когда изменение направления движения транспортного средства, вызываемое за счет управления траекторией, уведомляется заранее посредством звука и/или индикатора на дисплее.
Настоящее изобретение предоставляет устройство управления приведением в движение транспортного средства, которое выполняет управление траекторией, при котором управляемые колеса управляются таким образом, чтобы заставлять транспортное средство двигаться вдоль целевой траектории, при этом, когда существует вероятность того, что направление движения транспортного средства может быть изменено за счет управления траекторией, по меньшей мере, одно из рабочей позиции средства ввода для руления, управляемого водителем, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно полосы движения изменяется до того, как будет выполнено изменение направления движения.
Согласно вышеописанной конфигурации, по меньшей мере, одно из рабочей позиции средства ввода для руления, управляемого водителем, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно полосы движения изменяется до того, как будет выполнено изменение направления движения. Соответственно, предварительное уведомление относительно изменения направления движения транспортного средства может выдаваться пассажирам в транспортном средстве более предпочтительно по сравнению со случаем, когда изменение направления движения транспортного средства уведомляется заранее посредством звука и/или индикатора на дисплее. Таким образом, пассажиры в транспортном средстве могут более надежно предвидеть изменение направления движения транспортного средства, вызываемое за счет управления траекторией.
Вышеуказанная конфигурация может быть такой, что: вероятность того, что направление движения транспортного средства может быть изменено за счет управления траекторией, является вероятностью, по меньшей мере, вследствие одного из изменения целевой траектории, вызываемого посредством изменения кривизны дороги, которое возникает по мере того, как движется транспортное средство, и изменения целевой траектории, осуществляемого водителем в ответвлении дороги.
Согласно этой конфигурации, предварительное уведомление относительно изменения направления движения транспортного средства может выдаваться пассажирам в транспортном средстве в случае, если имеется вероятность того, что изменение целевой траектории вызывается посредством изменения кривизны дороги, которое возникает по мере того, как движется транспортное средство, или имеется вероятность того, что изменение целевой траектории осуществляется водителем в ответвлении дороги.
В частности, в случае, если имеется вероятность того, что изменение целевой траектории вызывается посредством изменения кривизны дороги, которое возникает по мере того, как движется транспортное средство, предварительное уведомление относительно изменения направления движения транспортного средства может выдаваться пассажирам в транспортном средстве посредством изменения рабочей позиции средства ввода для руления и т.п. перед фактическим изменением направления движения транспортного средства, соответствующим изменению кривизны дороги. Соответственно, можно снижать риск того, что пассажиры могут испытывать беспокойство и некомфортное ощущение в отношении того, будет или нет транспортное средство двигаться с изменением своего направления движения надлежащим образом по дороге.
В случае, если имеется вероятность того, что изменение целевой траектории осуществляется водителем в ответвлении дороги, предварительное уведомление относительно изменения или поддержания направления движения транспортного средства в ответвлении дороги выдается посредством изменения рабочей позиции средства ввода для руления и т.п. на этой стороне ответвления. Соответственно, поскольку пассажиры в транспортном средстве могут определять то, проезжают они ответвление с выбором дороги, уведомленной заранее, или они проезжают ответвление с выбором другой дороги, можно снижать риск того, что пассажиры могут испытывать беспокойство и некомфортное ощущение, когда транспортное средство проезжает ответвление.
Вышеуказанная конфигурация может быть такой, что: по меньшей мере, одно из рабочей позиции средства ввода для руления, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги изменяется в сторону, идентичную направлению движения транспортного средства, после изменения с помощью угла поворота при рулении во время управления управляемыми колесами таким образом, что транспортное средство движется вдоль целевой траектории максимально точно.
Согласно этой конфигурации, изменение направления движения транспортного средства может уведомляться заранее посредством изменения, по меньшей мере, одного из рабочей позиции средства ввода для руления, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги в сторону, идентичную направлению движения транспортного средства после изменения с помощью угла поворота при рулении во время управления управляемыми колесами таким образом, что транспортное средство движется вдоль целевой траектории максимально точно.
Вышеуказанная конфигурация может быть такой, что: транспортное средство имеет устройство варьирования взаимосвязи при рулении, которое варьирует взаимосвязь между рабочей позицией средства ввода для руления и углом поворота при рулении передних колес, которые являются управляемыми колесами, и рабочая позиция средства ввода для руления варьируется посредством управления устройством варьирования взаимосвязи при рулении.
Согласно этой конфигурации, посредством управления устройством варьирования взаимосвязи при рулении таким образом, чтобы варьировать взаимосвязь между рабочей позицией средства ввода для руления и углом поворота при рулении передних колес, рабочая позиция средства ввода для руления может варьироваться с помощью управления углом поворота при рулении передних колес таким образом, что он соответствует углу поворота при рулении для максимально точного достижения целевой траектории.
Вышеуказанная конфигурация может быть такой, что: транспортное средство имеет устройства варьирования угла поворота при рулении, которые варьируют углы поворота при рулении передних и задних колес, и, по меньшей мере, одно из угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги изменяется посредством управления углами поворота при рулении передних и задних колес посредством устройств варьирования угла поворота при рулении.
Согласно этой конфигурации, изменение направления движения транспортного средства может уведомляться заранее посредством управления углами поворота при рулении передних и задних колес таким образом, чтобы изменять, по меньшей мере, одно из угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги.
Вышеуказанная конфигурация может быть такой, что: транспортное средство имеет устройство варьирования взаимосвязи при рулении, которое варьирует взаимосвязь между рабочей позицией упомянутого средства ввода для руления, и устройство формирования вспомогательной силы усиления при рулении, и рабочая позиция упомянутого средства ввода для руления изменяется с помощью управления углом поворота при рулении передних колес посредством управления упомянутыми устройствами варьирования угла поворота при рулении и упомянутым устройством формирования вспомогательной силы усиления при рулении.
Согласно этой конфигурации, поскольку рабочая позиция средства ввода для руления может быть изменена с помощью управления углом поворота при рулении передних колес, рабочая позиция средства ввода для руления может быть изменена с помощью управления углом поворота при рулении передних колес таким образом, что он соответствует углу поворота при рулении для максимально точного достижения целевой траектории.
Вышеуказанная конфигурация может быть такой, что: транспортное средство имеет устройство варьирования взаимосвязи при рулении, которое варьирует взаимосвязь между рабочей позицией средства ввода для руления и углом поворота при рулении передних колес, и устройство варьирования угла поворота при рулении для задних колес, которое варьирует угол поворота при рулении задних колес, и, по меньшей мере, одно из угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства изменяется посредством управления устройством варьирования взаимосвязи при рулении и устройством варьирования угла поворота при рулении для задних колес.
Согласно этой конфигурации, изменение направления движения транспортного средства может уведомляться заранее посредством управления устройством варьирования взаимосвязи при рулении и устройством варьирования угла поворота при рулении для задних колес таким образом, чтобы изменять, по меньшей мере, одно из угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги.
Вышеуказанная конфигурация может быть такой, что: величина, на которую изменяется, по меньшей мере, одно из рабочей позиции средства ввода для руления, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно полосы движения, увеличивается, когда степень изменения направления движения транспортного средства является высокой, по сравнению со случаем, когда степень изменения направления движения транспортного средства является низкой.
Согласно этой конфигурации, величина управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства может быть увеличена, чтобы эффективно заранее уведомлять относительно изменения направления движения транспортного средства, когда степень изменения направления движения транспортного средства является высокой, по сравнению со случаем, когда степень изменения направления движения транспортного средства является низкой.
Вышеуказанная конфигурация может быть такой, что: в случае, если транспортное средство поперечно смещается относительно центра дороги, величина, на которую изменяется, по меньшей мере, одно из рабочей позиции средства ввода для руления, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги в направлении увеличения величины смещения, меньше по сравнению с величиной, на которую выполняется изменение в направлении снижения величины смещения.
Согласно этой конфигурации, когда величина смещения транспортного средства увеличивается посредством управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства, величина управления для предварительного уведомления может быть снижена, чтобы уменьшать некомфортное ощущение, которое могут испытывать пассажиры. Наоборот, когда величина смещения транспортного средства снижается посредством управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства, величина управления для предварительного уведомления может быть увеличена, чтобы эффективно заранее уведомлять относительно изменения направления движения транспортного средства.
Вышеуказанная конфигурация может быть такой, что: величина, на которую изменяется, по меньшей мере, одно из рабочей позиции средства ввода для руления, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги, снижается, когда безопасность движения транспортного средства является низкой, по сравнению со случаем, когда безопасность движения транспортного средства является высокой.
Согласно этой конфигурации, величина управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства может быть снижена, когда безопасность движения транспортного средства является низкой, по сравнению со случаем, когда безопасность движения транспортного средства является высокой. Соответственно, можно снижать риск того, что безопасность движения транспортного средства дополнительно снижается, посредством управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства. Наоборот, может быть снижена степень, в которой снижается величина управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства, когда безопасность движения транспортного средства является высокой, по сравнению со случаем, когда безопасность движения транспортного средства является низкой, что позволяет эффективно заранее уведомлять относительно изменения направления движения транспортного средства.
Вышеуказанная конфигурация может быть такой, что: когда величина, на которую изменяется, по меньшей мере, одно из рабочей позиции средства ввода для руления, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги, является небольшой, скорость изменения увеличивается по сравнению со случаем, когда величина изменения является большой.
Согласно этой конфигурации, когда величина управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства является небольшой, скорость для того, чтобы изменять величину управления, может быть увеличена, чтобы упрощать для пассажиров в транспортном средстве распознавание предварительного уведомления относительно изменения направления движения транспортного средства. Наоборот, когда величина управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства является большой, скорость для того, чтобы изменять величину управления, может быть снижена, чтобы снижать риск того, что пассажиры в транспортном средстве испытывают некомфортное ощущение вследствие быстрого варьирования величины управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства.
Вышеуказанная конфигурация может быть такой, что: вероятность того, что направление движения транспортного средства может быть изменено за счет управления траекторией, является вероятностью вследствие изменения целевой траектории, осуществляемого водителем в ответвлении дороги, и, по меньшей мере, одно из рабочей позиции средства ввода для руления, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно дороги изменяется в сторону, противоположную направлению движения транспортного средства после изменения.
Согласно этой конфигурации, величина управления для выдачи предварительного уведомления относительно изменения направления движения транспортного средства изменяется в направлении, противоположном направлению движения транспортного средства после изменения. Соответственно, поскольку величина воздействия от водителя увеличивается, когда он хочет изменять целевую траекторию в ответвлении, можно предпочтительно определять то, хочет или нет водитель изменять целевую траекторию, на основе величины воздействия от водителя.
Вышеуказанная конфигурация может быть такой, что: когда существует ответвление, имеющее направление движения, отличающееся от направления движения, определенного посредством целевой траектории, которая задана, и имеется вероятность того, что направление движения транспортного средства может быть изменено вследствие изменения целевой траектории, осуществляемого водителем, принимается решение в отношении того, должна или нет быть изменена целевая траектория, на основе операции водителем на средстве ввода для руления.
Согласно этой конфигурации, когда водитель хочет изменять целевую траекторию, может приниматься решение в отношении того, должна или нет быть изменена целевая траектория, на основе операции водителем на средстве ввода для руления, которая выполняется с тем, чтобы изменять направление движения.
Вышеуказанная конфигурация может быть такой, что: участок движения для принятия решения для определения того, должна или нет быть изменена целевая траектория, задается на этой стороне ответвления, и принимается решение в отношении того, должна или нет быть изменена целевая траектория, на основе операции, выполняемой водителем на средстве ввода для руления на участке движения для принятия решения.
Согласно этой конфигурации, может приниматься решение в отношении того, должна или нет быть изменена целевая траектория, на основе операции, выполняемой водителем на средстве ввода для руления на участке движения для принятия решения.
Вышеуказанная конфигурация может быть такой, что: конечная точка участка движения для принятия решения задается на этой стороне ответвления, и начальная точка участка движения для принятия решения задается в позиции, которая отстоит на предварительно определенное расстояние на этой стороне конечной точки.
Согласно этой конфигурации, участок движения для принятия решения, имеющий предписанное расстояние, может задаваться на этой стороне ответвления.
Вышеуказанная конфигурация может быть такой, что: когда величина и/или скорость операции, выполняемой водителем на средстве ввода для руления после того, как транспортное средство проезжает участок движения для принятия решения, является большой, изменение целевой траектории осуществляется быстрее по сравнению со случаем, когда величина и/или скорость является небольшой.
Согласно этой конфигурации, целевая траектория может быть изменена по мере необходимости даже после того, как транспортное средство проезжает участок движения для принятия решения, и скорость изменения может переменно задаваться в соответствии с величиной и/или скоростью операции, выполняемой водителем.
Краткое описание чертежей
Фиг. 1 является схематичным конфигурационным видом, показывающим первый вариант осуществления устройства управления приведением в движение транспортного средства согласно настоящему изобретению, которое применяется к транспортному средству, оснащенному механизмом электрического усилителя рулевого управления и механизмом рулевого управления задних колес.
Фиг. 2 является блок-схемой, иллюстрирующей общее управление приведением в движение транспортного средства в первом варианте осуществления.
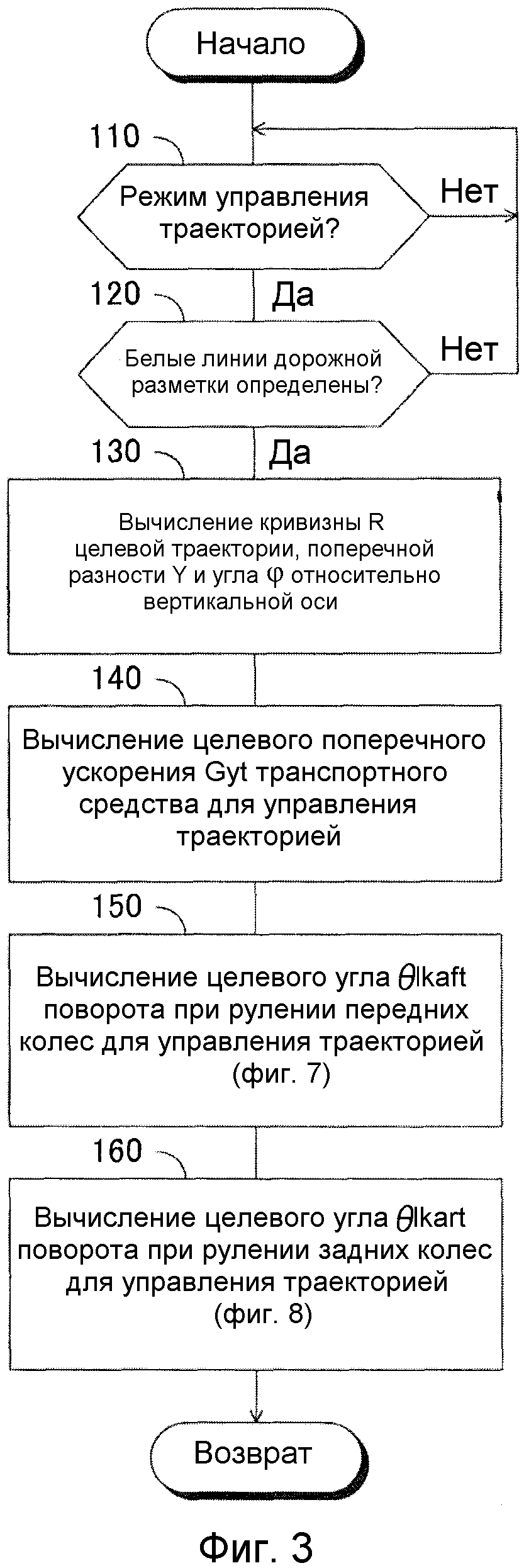
Фиг. 3 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления траекторией, показанном на фиг. 2.
Фиг. 4 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления вращением руля, показанном на фиг. 2.
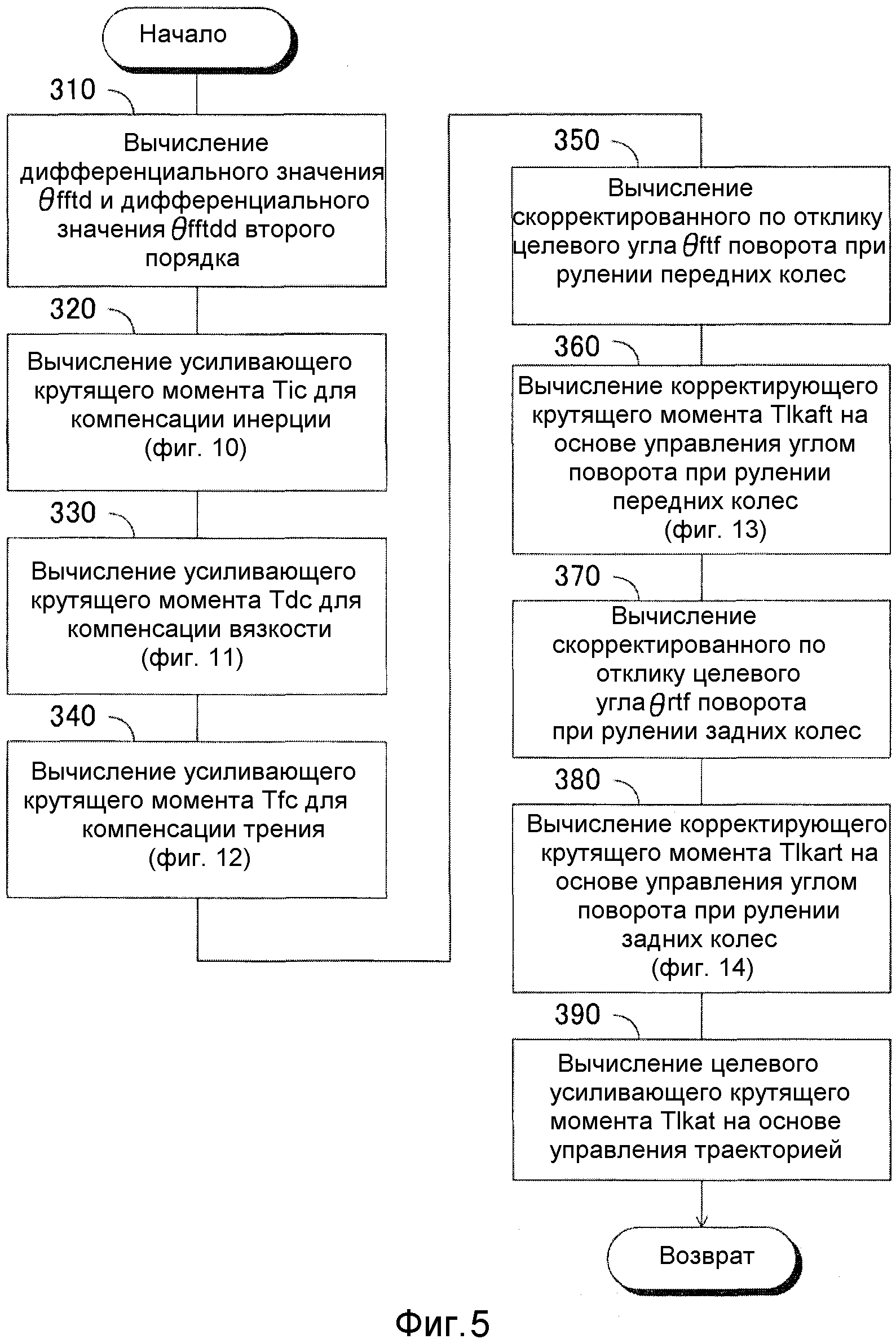
Фиг. 5 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления силой реакции при рулении, показанном на фиг. 2.
Фиг. 6 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления усиливающим крутящим моментом при рулении, показанном на фиг. 2.
Фиг. 7 является картой для вычисления целевого угла θlkaft поворота при рулении передних колес для управления траекторией на основе целевого поперечного ускорения Gyt.
Фиг. 8 является картой для вычисления целевого угла θlkart поворота при рулении задних колес для управления траекторией на основе целевого поперечного ускорения Gyt.
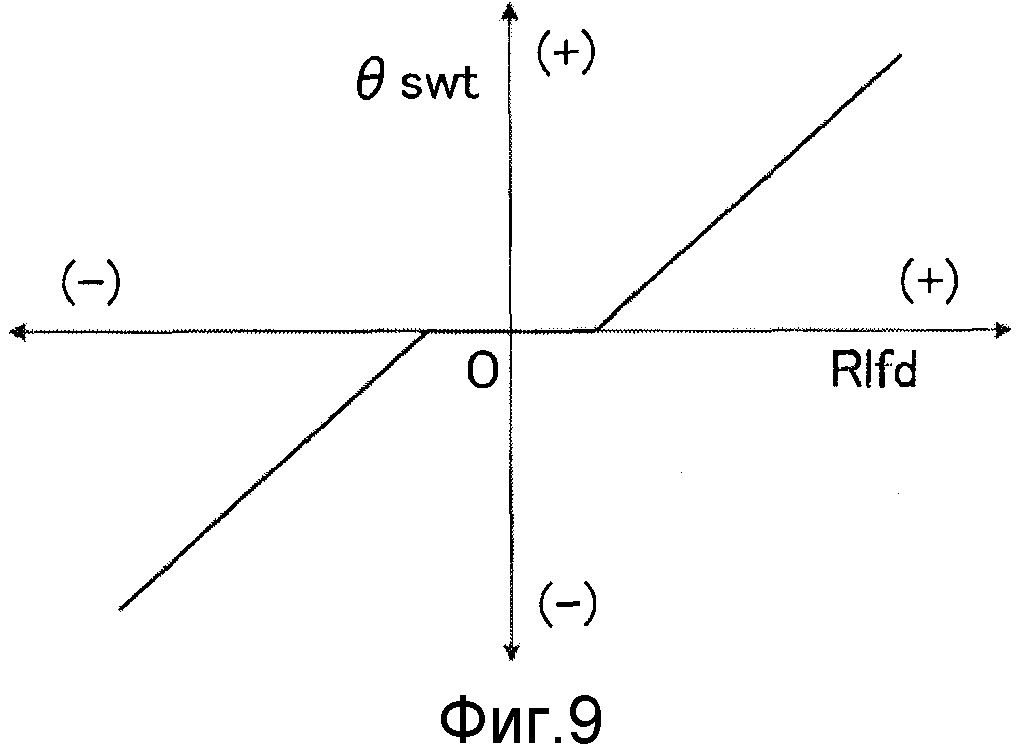
Фиг. 9 является картой для вычисления целевого угла θswt вращения руля на основе скорости R1fd изменения кривизны R целевой траектории.
Фиг. 10 является картой для вычисления усиливающего крутящего момента Tic для компенсации инерции модуля электрического усилителя рулевого управления и т.п. на основе дифференциального значения θfftdd второго порядка конечного целевого угла θfft поворота при рулении передних колес.
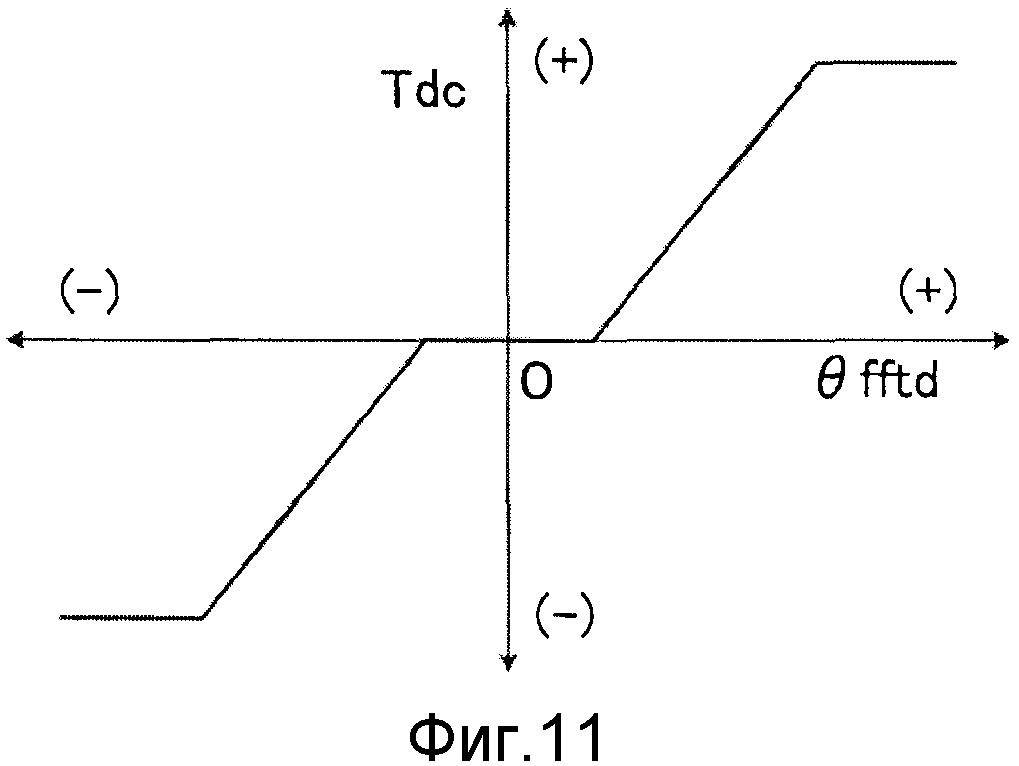
Фиг. 11 является картой для вычисления усиливающего крутящего момента Tdc для компенсации вязкости в модуле электрического усилителя рулевого управления и т.п. на основе дифференциального значения θfftd конечного целевого угла θfft поворота при рулении передних колес.
Фиг. 12 является картой для вычисления усиливающего крутящего момента Tfc для компенсации трения в модуле электрического усилителя рулевого управления и т.п. на основе дифференциального значения θfftd конечного целевого угла θfft поворота при рулении передних колес.
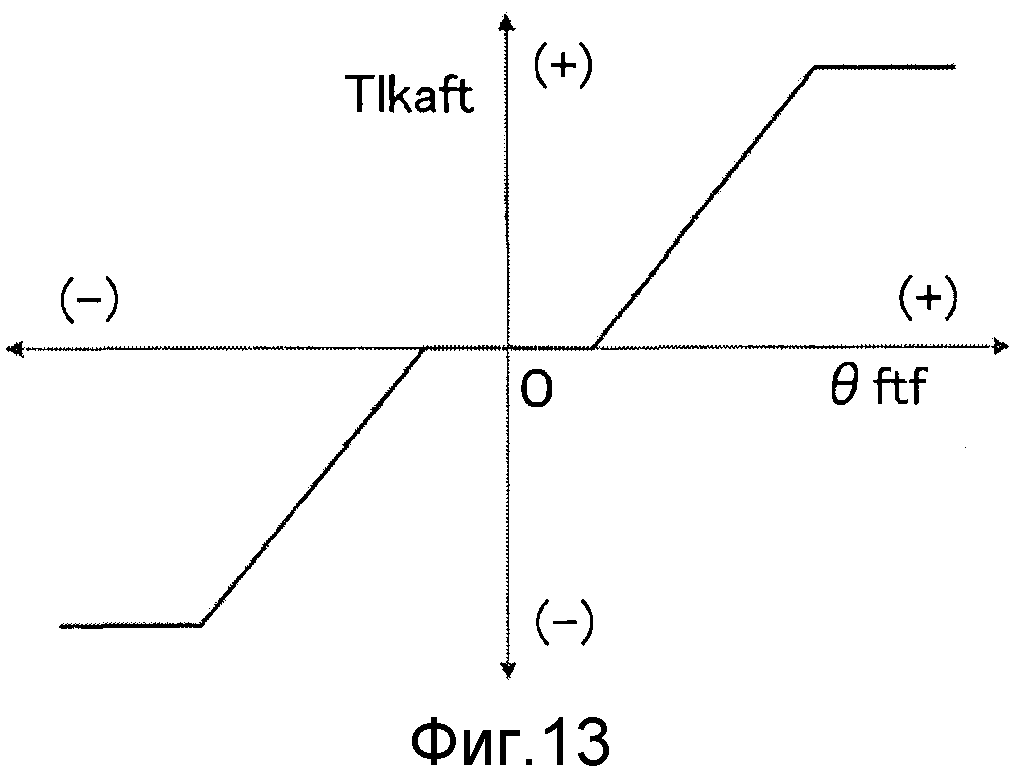
Фиг. 13 является картой для вычисления корректирующего крутящего момента Tlkaft на основе управления углом поворота при рулении передних колес на основе скорректированного по отклику целевого угла θftf поворота при рулении передних колес.
Фиг. 14 является картой для вычисления корректирующего крутящего момента Tlkart на основе управления углом поворота при рулении задних колес на основе скорректированного по отклику целевого угла θrtf поворота при рулении задних колес.
Фиг. 15 является картой для вычисления целевого базового усиливающего крутящего момента Tbaset для уменьшения нагрузки по рулению на водителя на основе крутящего момента Ts при рулении и скорости V транспортного средства.
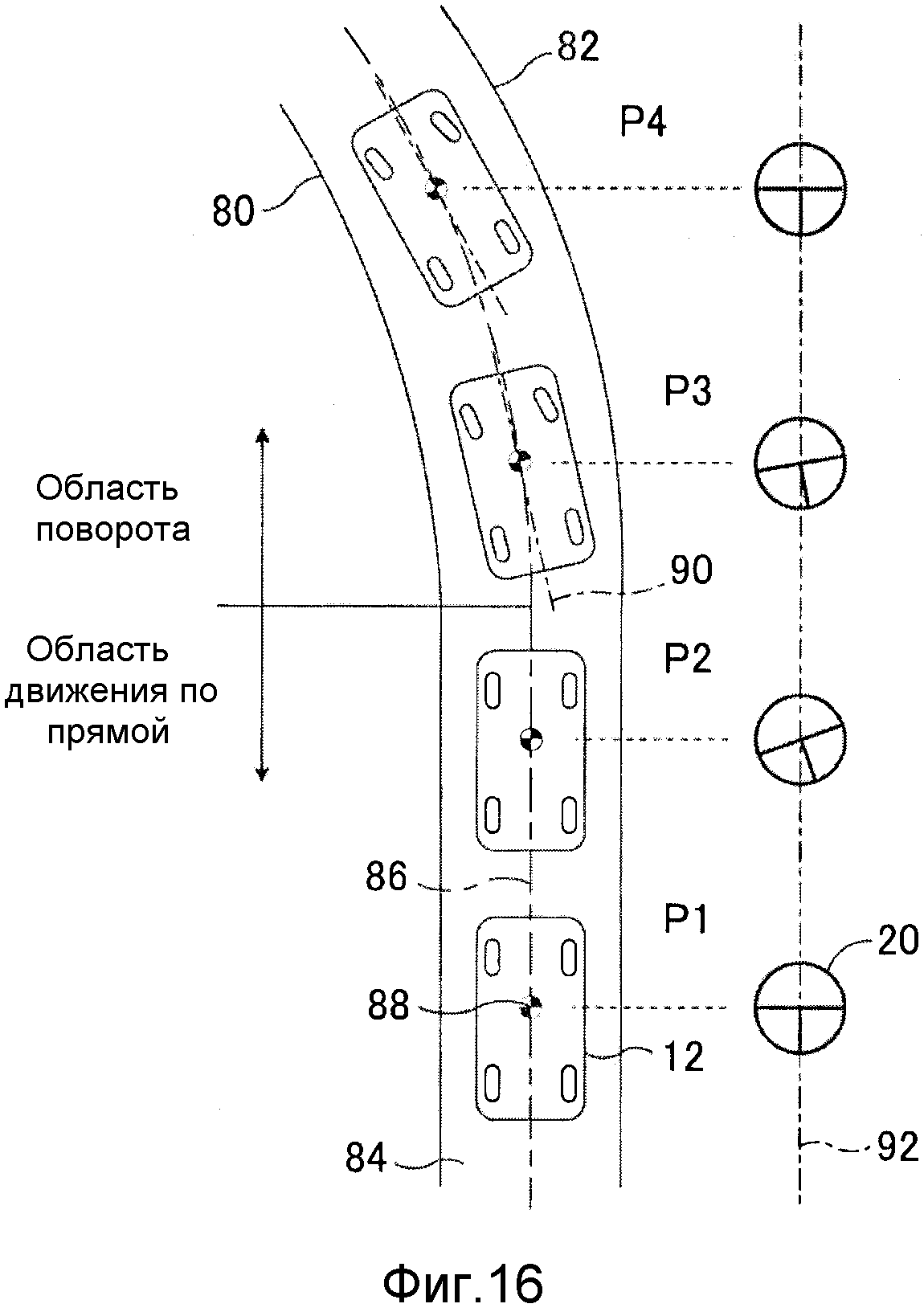
Фиг. 16 является иллюстрацией, показывающей работу первого варианта осуществления относительно случая, в котором транспортное средство движется по дороге, которая варьируется от прямой до левого поворота.
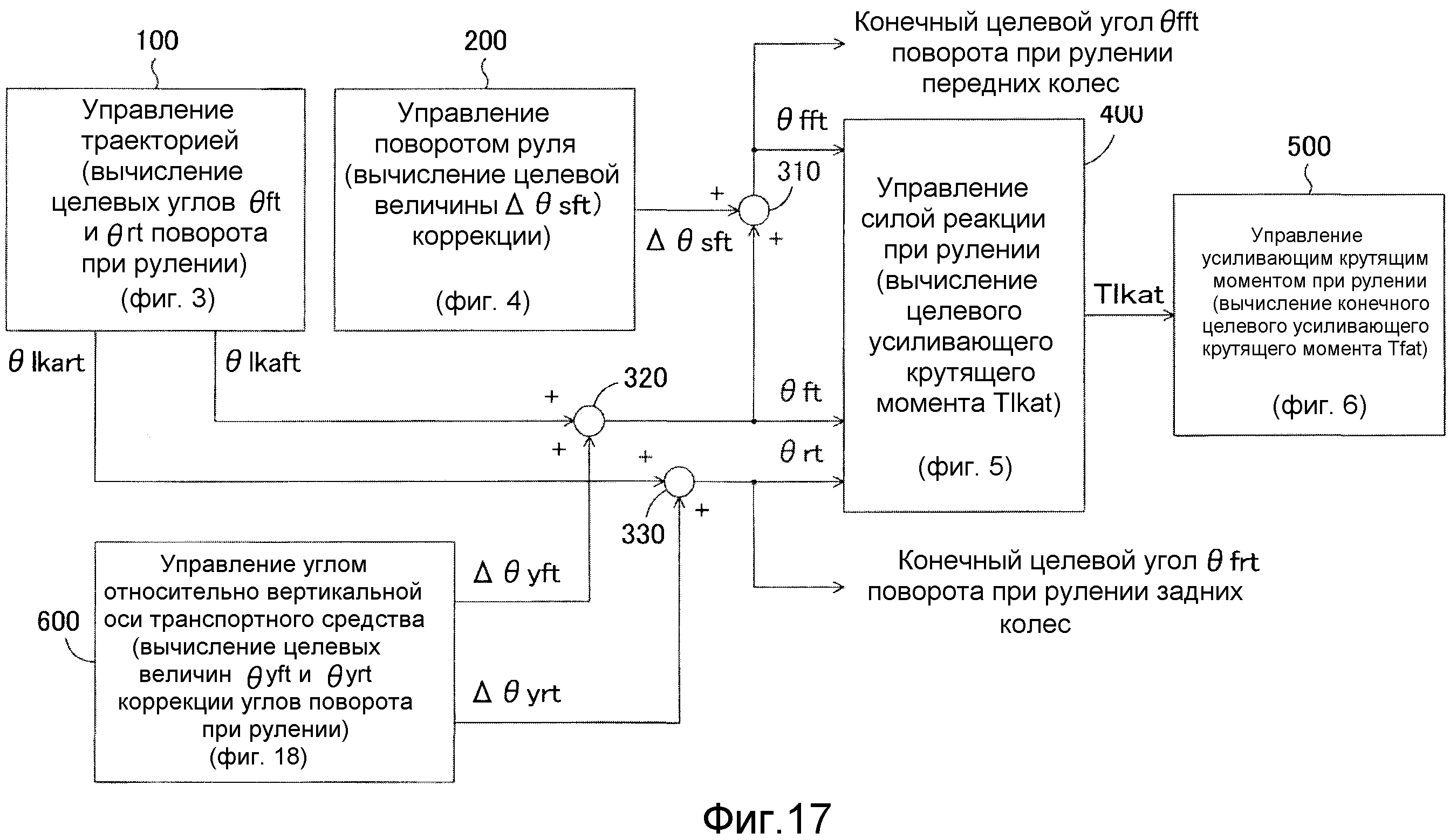
Фиг. 17 является блок-схемой, иллюстрирующей общее управление приведением в движение транспортного средства во втором варианте осуществления устройства управления приведением в движение транспортного средства согласно настоящему изобретению.
Фиг. 18 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления углом относительно вертикальной оси транспортного средства, показанном на фиг. 17.
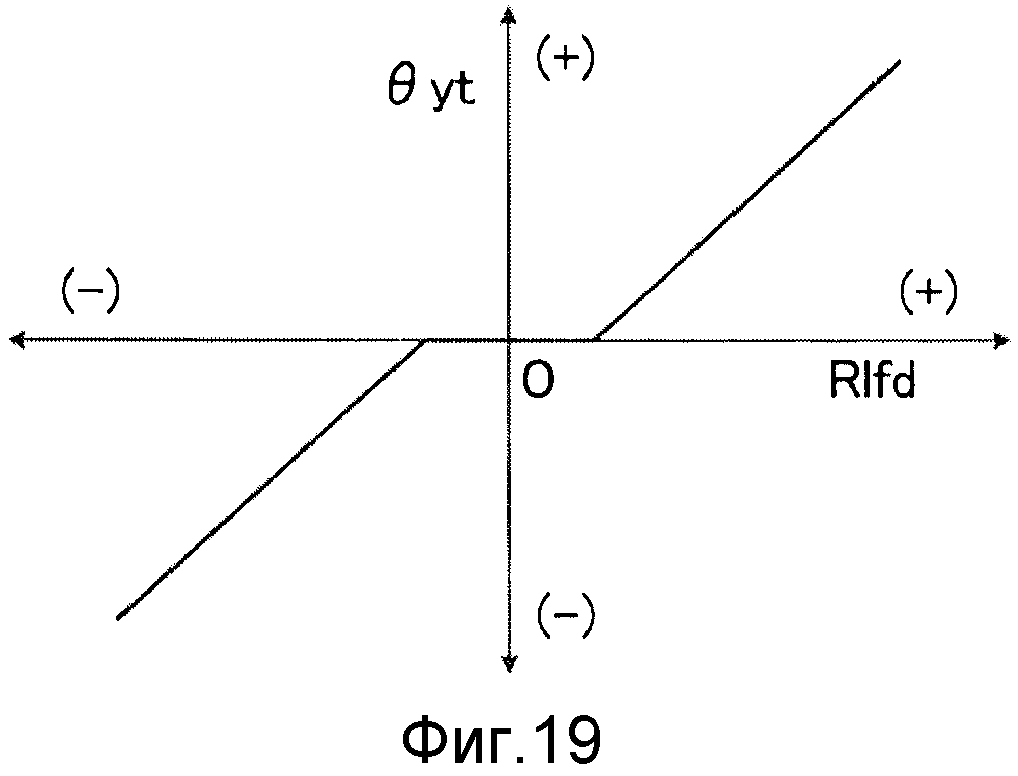
Фиг. 19 является картой для вычисления целевой величины Δθyt управления углом относительно вертикальной оси транспортного средства на основе скорости R1fd изменения кривизны R целевой траектории.
Фиг. 20 является иллюстрацией, показывающей работу второго варианта осуществления относительно случая, в котором транспортное средство движется по дороге, которая варьируется от прямой до левого поворота.
Фиг. 21 является блок-схемой последовательности операций способа, показывающей процедуру управления траекторией в третьем варианте осуществления устройства управления приведением в движение транспортного средства согласно настоящему изобретению.
Фиг. 22 показывает пример ответвляющейся дороги, которая разветвляется с Y-образной конфигурацией.
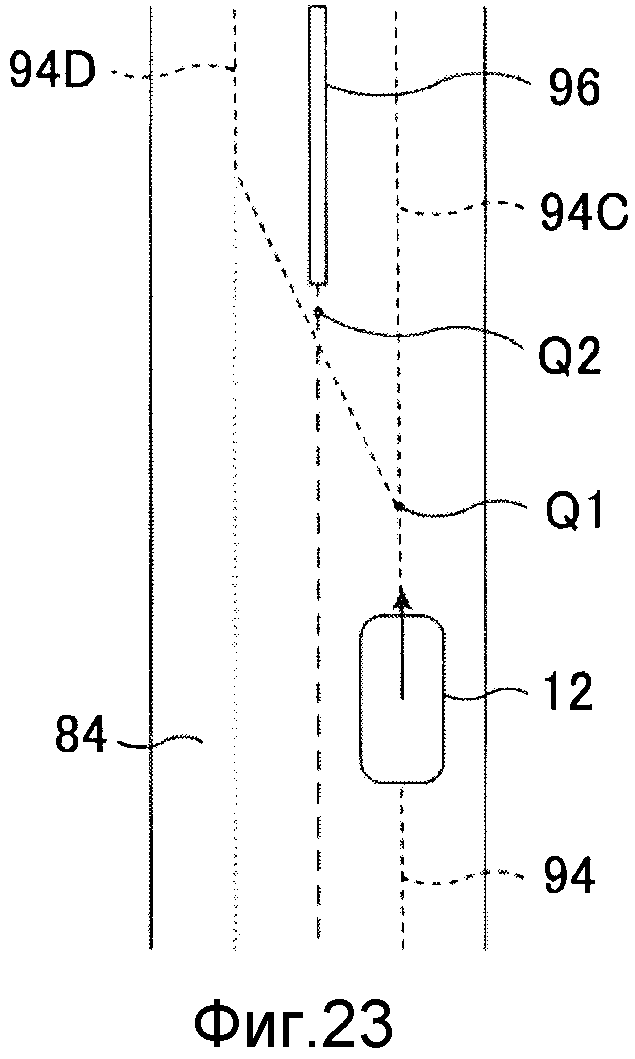
Фиг. 23 показывает пример ответвляющейся дороги, в котором курс движения разветвляется внутри дороги.
Фиг. 24 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для определения необходимости изменения целевой траектории в третьем варианте осуществления.
Фиг. 25 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для выдачи предварительного уведомления относительно наличия ответвления дороги в третьем варианте осуществления.
Фиг. 26 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для определения намерения водителя касательно изменения курса движения в третьем варианте осуществления.
Фиг. 27 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для определения конечного намерения водителя касательно изменения курса движения в третьем варианте осуществления.
Фиг. 28 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для изменения целевой траектории в третьем варианте осуществления.
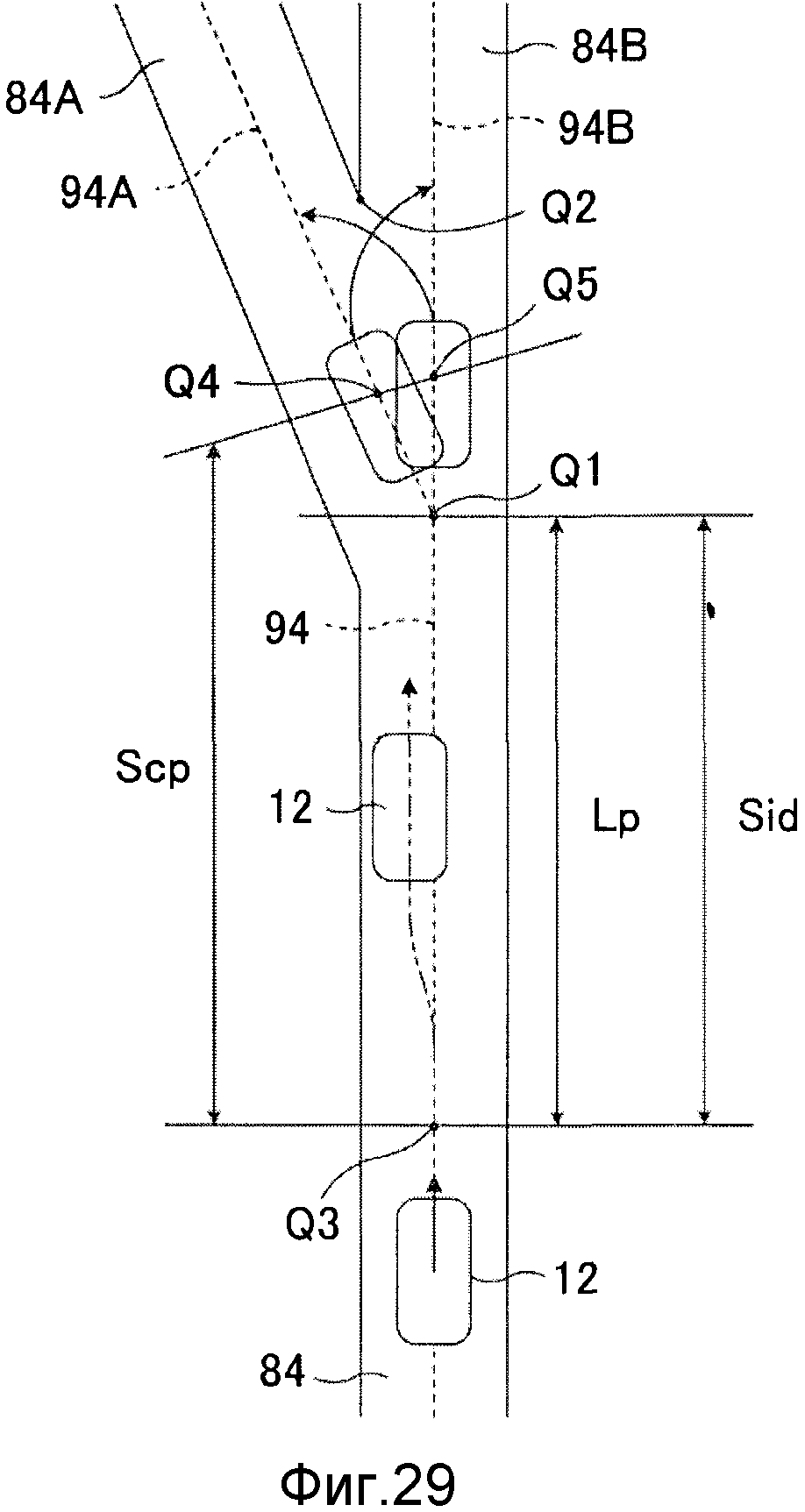
Фиг. 29 является пояснительным видом относительно участка для обеспечения возможности изменения целевой траектории и описанного участка определения намерения водителя.
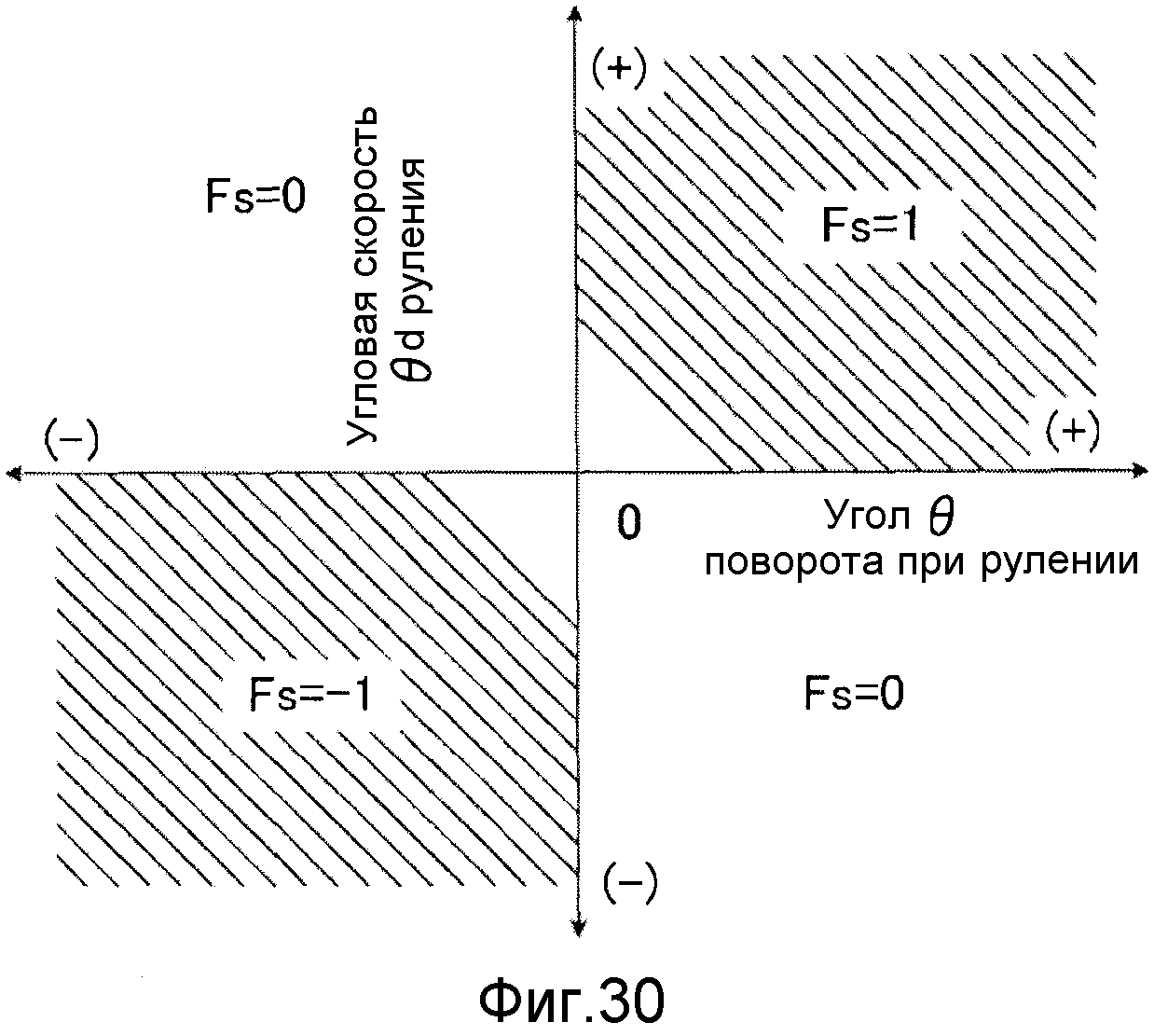
Фиг. 30 является картой для определения того, по какой дороге хочет ехать водитель, из текущей дороги, левой ответвляющейся дороги и правой ответвляющейся дороги, на основе угла θ поворота при рулении, угловой скорости θd руления и т.п., в случае, если транспортное средство находится на этой стороне ответвления.
Фиг. 31 является картой для определения того, по какой дороге хочет ехать водитель, из текущей дороги, левой ответвляющейся дороги и правой ответвляющейся дороги, на основе крутящего момента Ts при рулении, скорости Tsd изменения крутящего момента при рулении и т.п., в случае, если транспортное средство находится на этой стороне ответвления.
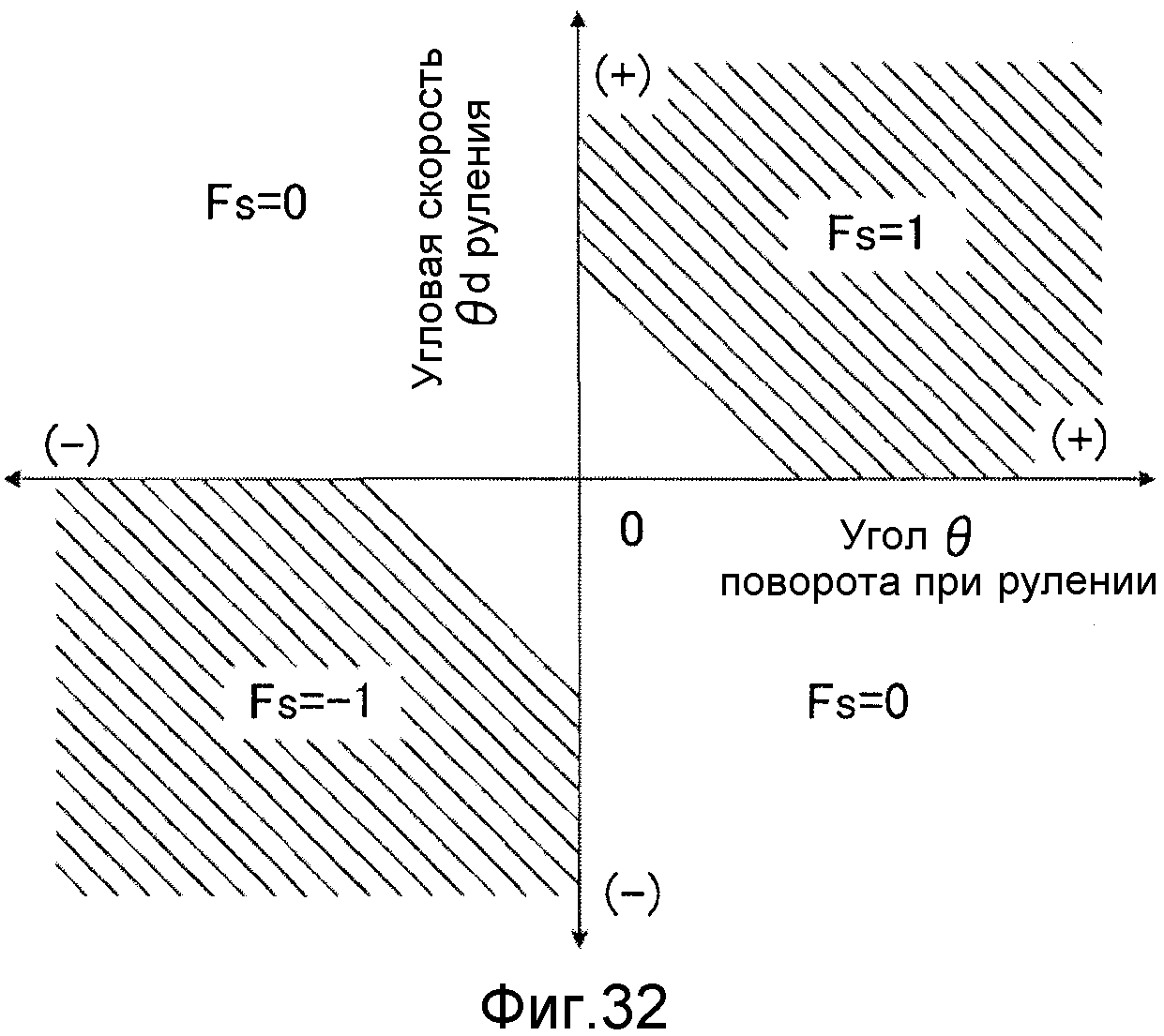
Фиг. 32 является картой для определения того, по какой дороге хочет ехать водитель, из текущей дороги, левой ответвляющейся дороги и правой ответвляющейся дороги, на основе угла θ поворота при рулении, угловой скорости θd руления и т.п., в случае, если транспортное средство проезжает ответвление.
Фиг. 33 является картой для определения того, по какой дороге хочет ехать водитель, из текущей дороги, левой ответвляющейся дороги и правой ответвляющейся дороги, на основе крутящего момента Ts при рулении, скорости Tsd изменения крутящего момента при рулении и т.п., в случае, если транспортное средство проезжает ответвление.
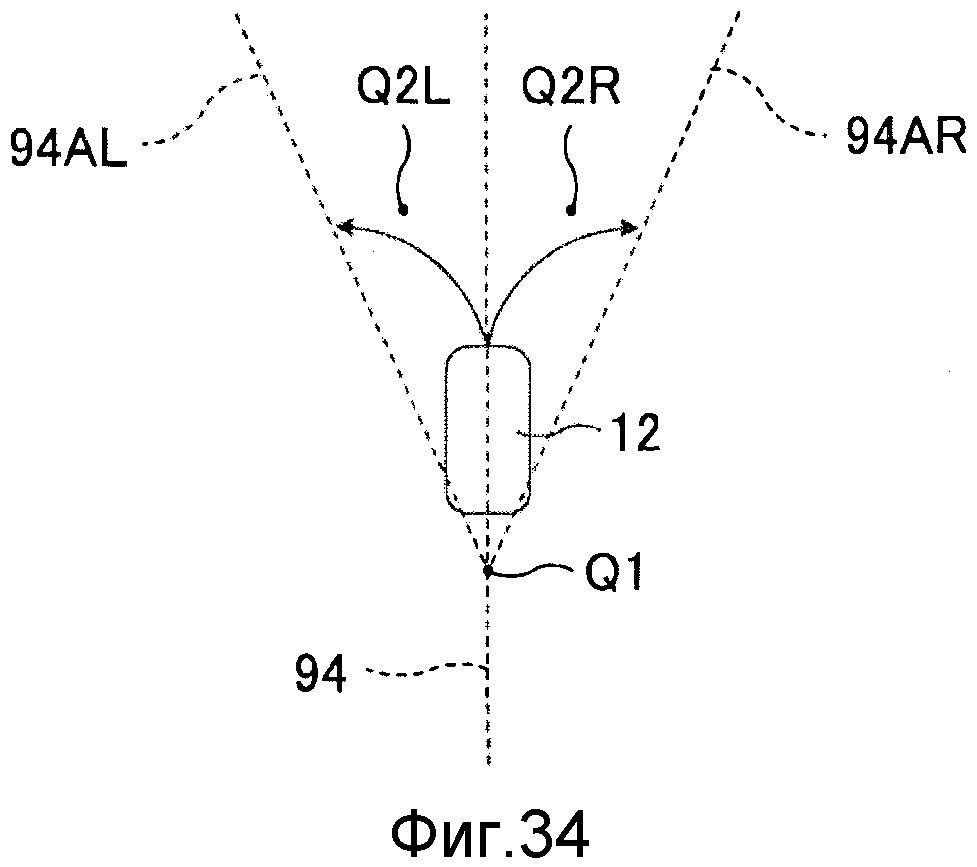
Фиг. 34 является картой для определения того, по какой дороге хочет ехать водитель, из текущей дороги, левой ответвляющейся дороги и правой ответвляющейся дороги, на основе точки на текущей целевой траектории, позиции конечной точки Q2 ответвления, угла θ поворота при рулении и угловой скорости θd руления.
Фиг. 35 является картой для вычисления весового коэффициента Ws для целевой траектории после изменения на основе максимальной степени Dsmax отклонения, скорости V транспортного средства и истекшего времени tc.
Фиг. 36 является пояснительным видом, показывающим траекторию транспортного средства, выведенную посредством изменения целевой траектории посредством третьего варианта осуществления для случая (A), в котором угол между двумя дорогами в ответвлении является большим, и случая (B), в котором угол является небольшим.
Подробное описание вариантов осуществления
Далее подробно описываются некоторые предпочтительные варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи.
Первый вариант осуществления изобретения
Фиг. 1 является схематичным конфигурационным видом, показывающим первый вариант осуществления устройства управления приведением в движение транспортного средства согласно настоящему изобретению, которое применяется к транспортному средству, оснащенному механизмом электрического усилителя рулевого управления и механизмом рулевого управления задних колес.
Ссылаясь на фиг. 1, устройство 10 управления приведением в движение транспортного средства устанавливается в транспортном средстве 12 и включает в себя модуль 14 варьирования угла поворота при рулении и электронный модуль 16 управления для управления модулем варьирования угла поворота при рулении. На фиг. 1, ссылки 18FL и 18FR с номерами, соответственно, обозначают левое и правое передние колеса, которые являются управляемыми колесами; и 18RL и 18RR, соответственно, обозначают левое и правое задние колеса. Руление правым и левым передними колесами 18FR, 18FL выполняется посредством модуля 22 электрического усилителя рулевого управления с механизмом реечной передачи через зубчатую рейку 24 и поперечные рулевые тяги 26L и 26R, соответственно, при этом модуль рулевого управления приводится в действие в ответ на операцию руления на руле 20 водителем.
Руль 20, который служит в качестве средства ввода для руления, соединяется с возможностью приведения в действие с валом-шестерней 34 модуля 22 усилителя рулевого управления через верхний рулевой вал 28, модуль 14 варьирования угла поворота при рулении, нижний рулевой вал 30 и универсальный карданный шарнир 32. Модуль 14 варьирования угла поворота при рулении включает в себя электромотор 36 для приведения в движение при вспомогательном рулении. Электромотор 36 имеет корпус 14A, соединенный с нижним концом верхнего рулевого вала 28, и ротор 14B, соединенный с верхним концом нижнего рулевого вала 30.
Из вышеописанного очевидно, что модуль 14 варьирования угла поворота при рулении вращает нижний рулевой вал 30 относительно верхнего рулевого вала 28 таким образом, чтобы приводить в движение, при вспомогательном рулении, левое и правое передние колеса 18FL и 18FR относительно руля 20. Модуль 14 варьирования угла поворота при рулении служит в качестве системы рулевого управления с переменным передаточным отношением (VGRS), т.е. модуль варьирования передаточного числа рулевого управления, который увеличивает и уменьшает передаточное отношение рулевого управления (обратную величину относительно передаточного числа рулевого управления), управляется посредством узла управления углом поворота при рулении электронного модуля 16 управления.
Руление левым и правым задними колесами 18RL и 18RR выполняется посредством модуля 44 электрического усилителя рулевого управления механизма 42 рулевого управления задних колес через поперечные рулевые тяги 46L и 46R независимо от руления передних левого и правого колес 18FL и 18FR, и механизм 42 рулевого управления задних колес управляется посредством узла рулевого управления электронного модуля 16 управления.
Проиллюстрированный механизм 42 рулевого управления задних колес является вспомогательным механизмом электрического рулевого управления с известной конфигурацией и имеет электромотор 48A и механизм 48C передачи движения винтового типа, например, который передает вращательное движение электромотора 48A как возвратно-поступательное движение соединительной тяги 48B. Соединительная тяга 48B взаимодействует с поперечными рулевыми тягами 46L и 46R и рычагами поворотных кулаков, не проиллюстрированными на чертеже, чтобы составлять механизм поворачивания колес, который поворачивает левое и правое задние колеса 18RL и 18RR, чтобы рулить посредством возвратно-поступательного движения соединительной тяги 48B.
Хотя не показано подробно на чертеже, механизм 48C передачи движения передает вращательное движение электромотора 48A как возвратно-поступательное движение соединительной тяги 48B, но не передает силы, которые левое и правое задние колеса 18RL и 18RR принимают от поверхности дороги, на электромотор 48A, так что электромотор 48A не вращается посредством силы, передаваемой на соединительную тягу 48B.
В проиллюстрированном варианте осуществления, модуль 22 электрического усилителя рулевого управления является модулем электрического усилителя рулевого управления, расположенным концентрически с зубчатой рейкой. Модуль 22 усилителя рулевого управления включает в себя электромотор 50 и механизм, который преобразует крутящий момент вращения электромотора 50 в силу в направлении возвратно-поступательного движения зубчатой рейки 24, такой как, например, шариковинтовой механизм 52 преобразования. Модуль 22 усилителя рулевого управления управляется посредством узла управления модуля электрического усилителя рулевого управления (EPS) электронного модуля 16 управления и формирует усиливающий крутящий момент при рулении таким образом, чтобы приводить в действие зубчатую рейку 24 относительно корпуса 54, с тем чтобы уменьшать нагрузку по рулению на водителя.
Следует понимать, что модуль 14 варьирования угла поворота при рулении может иметь любую конфигурацию до тех пор, пока он взаимодействует с устройством формирования силы усиления при вспомогательном рулении таким образом, чтобы варьировать угол поворота при рулении левого и правого передних колес независимо от операции руления водителя и варьировать угол вращения руля 20. Аналогично, устройство формирования силы усиления при рулении может иметь любую конфигурацию до тех пор, пока он может формировать вспомогательную силу усиления при рулении. Дополнительно, в то время как средство ввода для руления является рулем 20, и его рабочая позиция является углом вращения, средство ввода для руления может быть рулевым рычагом в форме джойстика, и его рабочая позиция может быть возвратно-поступательной рабочей позицией.
В варианте осуществления, показанном на чертеже, верхний рулевой вал 28 содержит датчик 50 угла поворота при рулении, который определяет угол вращения верхнего рулевого вала в качестве угла θ поворота при рулении, и датчик 52 крутящего момента при рулении, который определяет крутящий момент Ts при рулении. Нижний рулевой вал 30 содержит датчик 54 угла вращения, который определяет угол вращения нижнего рулевого вала в качестве угла φ поворота ведущей шестерни (угла вращения вала-шестерни 34). Сигналы, указывающие угол θ поворота при рулении, крутящий момент Ts при рулении и угол φ поворота ведущей шестерни, вводятся в узел управления углом поворота при рулении и узел EPS-управления электронного модуля 16 управления.
Следует отметить, что датчик 54 угла вращения может быть заменен датчиком угла вращения, который определяет угол относительного вращения в модуле 14 варьирования угла поворота при рулении, т.е. угол вращения нижнего рулевого вала 30 относительно верхнего рулевого вала 28.
Транспортное средство 12 содержит переднюю CCD-камеру 58, которая захватывает изображение участка спереди (т.е. впереди транспортного средства), и избирательный переключатель 60, который управляется пассажиром транспортного средства таким образом, чтобы выбирать активацию и деактивацию управления удержанием на полосе движения (LKA) для обеспечения движения транспортного средства вдоль полосы движения. Сигнал, указывающий информацию изображений участка спереди (т.е. впереди транспортного средства), захваченную посредством CCD-камеры 58, вводится в узел управления приведением в движение электронного модуля 16 управления. Следует отметить, что информация изображений участка спереди (т.е. впереди транспортного средства) и информация полосы движения может получаться посредством средства, отличного от CCD-камеры.
Отдельные узлы электронного модуля 16 управления могут быть узлами, которые содержат микрокомпьютеры, и каждый микрокомпьютер может иметь CPU, ROM, RAM и порт ввода-вывода, соединенные между собой через двунаправленную общую шину. Датчик 50 угла поворота при рулении, датчик 52 крутящего момента при рулении и датчик 54 угла вращения определяют угол θ поворота при рулении, крутящий момент Ts при рулении и угол φ вращения ведущей шестерни, соответственно, причем определенные переменные являются положительными, когда руление или поворот транспортного средства выполняется в направлении левого поворота транспортного средства.
Как подробнее описано ниже, электронный модуль 16 управления выполняет управление траекторией, называемое "управлением удержанием на полосе движения (LKA-управлением)", посредством управления модулем 14 варьирования угла поворота при рулении и модулем 22 электрического усилителя рулевого управления в соответствии с блок-схемами последовательности операций способа, показанными на фиг. 2, и т.п. Помимо этого, электронный модуль 16 управления вращает руль 20 до его вращения для варьирования направления движения транспортного средства за счет управления траекторией, когда радиус целевой траектории для обеспечения движения транспортного средства вдоль полосы движения изменяется по мере того, как движется транспортное средство.
Далее, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 2, поясняется управление приведением в движение транспортного средства в первом варианте осуществления. Следует отметить, что управление в соответствии с блок-схемами последовательности операций способа и блок-схемой, показанной на фиг. 2-6, начинается, когда включается переключатель зажигания (не показан на чертеже), и многократно выполняется с предварительно определенными интервалами.
В частности, фиг. 2 является блок-схемой, иллюстрирующей общее управление приведением в движение транспортного средства в первом варианте осуществления, и фиг. 3 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления траекторией, показанном на фиг. 2. Фиг. 4 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления вращением руля, показанном на фиг. 2, и фиг. 5 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления силой реакции при рулении, показанном на фиг. 2. Дополнительно, фиг. 6 является блок-схемой последовательности операций способа, показывающей управляющую процедуру в блоке управления усиливающим крутящим моментом при рулении, показанном на фиг. 2.
Управление в блоке 100 управления траекторией, показанном на фиг. 2, выполняется в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 3, посредством узла управления приведением в движение транспортного средства электронного модуля 16 управления. Вычисляются целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес для обеспечения движения транспортного средства вдоль целевой траектории, и сигналы, указывающие их, выводятся в блок 400 управления силой реакции при рулении в качестве целевого угла θft поворота при рулении передних колес и целевого угла θrt поворота при рулении задних колес для управления траекторией.
Управление в блоке 200 управления вращением руля, показанном на фиг. 2, выполняется в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 4, посредством узла управления приведением в движение транспортного средства электронного модуля 16 управления. Вычисляется целевой угол θswt вращения, который требуется для того, чтобы вращать руль 20 для оповещения относительно изменения направления движения транспортного средства до фактического изменения направления движения транспортного средства, вызываемого за счет управления траекторией. Помимо этого, вычисляется целевая величина Δθsft коррекции угла поворота при рулении передних колес для вращения руля 20 на целевой угол θswt вращения, и сигнал, указывающий ее, выводится в сумматор 310.
Целевая величина Δθsft коррекции суммируется с целевым углом θft поворота при рулении передних колес посредством сумматора 310, чтобы вычислять конечный целевой угол θfft поворота при рулении передних колес. Модуль 14 варьирования угла поворота при рулении управляется посредством узла управления углом поворота при рулении электронного модуля 16 управления таким образом, что угол θf поворота при рулении передних колес соответствует конечному целевому углу θfft поворота при рулении. Целевой угол θrt поворота при рулении задних колес задается равным конечному целевому углу θfrt поворота при рулении посредством узла управления углом поворота при рулении электронного модуля 16 управления, и модуль 44 электрического усилителя рулевого управления механизма 42 рулевого управления задних колес управляется посредством узла таким образом, что угол θr поворота при рулении задних колес соответствует конечному целевому углу θfrt поворота при рулении задних колес.
Управление в блоке 400 управления силой реакции при рулении выполняется в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 5, посредством узла EPS-управления электронного модуля 16 управления. Целевой усиливающий крутящий момент Tlkat для управления углом θf поворота при рулении передних колес как равным целевому углу θlkaft поворота при рулении управления траекторией вычисляется на основе целевого угла θft поворота при рулении передних колес, целевого угла θrt поворота при рулении задних колес и т.п. Целевой усиливающий крутящий момент Tlkat является целевым усиливающим крутящим моментом для управления углом θf поворота при рулении передних колес как равным целевому углу θlkaft поворота при рулении управления траекторией посредством взаимодействия модуля 14 варьирования угла поворота при рулении и модуля 22 электрического усилителя рулевого управления без вращения руля 20.
Управление в блоке 500 управления усиливающим крутящим моментом при рулении выполняется в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 6, посредством узла EPS-управления электронного модуля 16 управления. Сумма целевого базового усиливающего крутящего момента Tbaset для уменьшения нагрузки по рулению на водителя и целевого усиливающего крутящего момента Tlkat вычисляется как конечный целевой усиливающий крутящий момент Tfat. Модуль 22 электрического усилителя рулевого управления управляется таким образом, что усиливающий крутящий момент при рулении соответствует конечному целевому усиливающему крутящему моменту Tfat.
Процедура управления траекторией
На этапе 110 в процедуре управления траекторией, показанной на фиг. 3, после того, как считывается требуемая информация, принимается решение в отношении того, включен или нет избирательный переключатель 60, т.е. выбран или нет режим управления траекторией. Когда принимается отрицательное решение, снова выполняются считывание требуемой информации и этап 100, при этом, когда принимается положительное решение, управление переходит к этапу 120.
На этапе 120 принимается решение в отношении того, определены или нет белые линии дорожной разметки полосы движения, на основе информации изображений участка спереди, захваченной посредством CCD-камеры 58, т.е. в отношении того, может или нет указываться полоса движения. Когда принимается отрицательное решение, поскольку целевая траектория для управления траекторией не может задаваться, управление возвращается к этапу считывания требуемой информации и этапу 110, при этом, когда принимается положительное решение, управление переходит к этапу 130.
На этапе 130, целевая траектория транспортного средства задается посредством анализа и т.п. информации изображений участка спереди, захваченной посредством CCD-камеры 58, и вычисляются кривизна R (обратная величина от радиуса) целевой траектории, поперечная разность Y и угол φ относительно вертикальной оси транспортного средства относительно целевой траектории. Целевая траектория транспортного средства может задаваться на основе информации, отправленной из навигационного модуля (не показан на чертеже), или может задаваться на основе комбинации анализа информации изображений и информации, отправленной из навигационного модуля.
Хотя кривизна R целевой траектории и т.п. представляют собой параметры, необходимые для выполнения управления траекторией для обеспечения движения транспортного средства вдоль целевой траектории, поскольку способы для вычисления параметров не составляют существенную часть настоящего изобретения, параметры могут быть вычислены любыми способами. В частности, поскольку текущая позиция транспортного средства постепенно изменяется с течением времени, кривизна R целевой траектории может вычисляться как функция от времени t, истекшего с настоящего момента.
На этапе 140, целевое поперечное ускорение Gyt транспортного средства, требуемое для того, чтобы заставлять транспортное средство двигаться вдоль целевой траектории, вычисляется на основе вышеуказанных параметров для управления траекторией. Поскольку способ для вычисления целевого поперечного ускорения Gyt не составляет существенную часть настоящего изобретения, целевое поперечное ускорение Gyt может быть вычислено любым способом. Например, может задаваться карта, указывающая взаимосвязь между вышеуказанными параметрами для управления траекторией и целевым поперечным ускорением Gyt, и целевое поперечное ускорение Gyt может быть вычислено из карты на основе вышеуказанных параметров.
На этапе 150, целевой угол θlkaft поворота при рулении передних колес для управления траекторией вычисляется из карты, показанной на фиг. 7, на основе целевого поперечного ускорения Gyt. Сигнал, указывающий значение, выводится в качестве целевого угла θft поворота при рулении передних колес для управления траекторией в сумматор 310 и блок 400 управления силой реакции при рулении.
На этапе 160, целевой угол θlkart поворота при рулении задних колес для управления траекторией вычисляется из карты, показанной на фиг. 8, на основе целевого поперечного ускорения Gyt. Сигнал, указывающий значение, выводится в качестве целевого угла θrt поворота при рулении задних колес для управления траекторией в блок 400 управления силой реакции при рулении и в узел управления углом поворота при рулении электронного модуля 16 управления.
Процедура управления вращением руля
Этапы 210 и 220 в процедуре управления вращением руля, показанной на фиг. 4, выполняются аналогично этапам 110 и 120, соответственно, в вышеописанной процедуре управления траекторией.
На этапе 230 вычисляется опорное расстояние Lf для управления вращением руля. Вращение руля для оповещения относительно изменения направления движения транспортного средства пассажирам в транспортном средстве должно выполняться в позиции, которая отстоит назад относительно позиции, в которой возникает фактическое изменение направления движения транспортного средства, и расстояние между позициями должно увеличиваться по мере того, как возрастает скорость V транспортного средства. Соответственно, опорное расстояние Lf вычисляется таким образом, что оно увеличивается по мере того, как возрастает скорость V транспортного средства.
На этапе 240, кривизна R1f целевой траектории в позиции, отстоящей вперед на опорное расстояние Lf от текущей позиции, определяется на основе результатов анализа информации изображений впереди транспортного средства и скорости V транспортного средства. Дифференциальное значение во времени кривизны R1f также вычисляется как скорость R1fd изменения кривизны R целевой траектории.
На этапе 250, целевой угол θswt вращения руля 20 вычисляется из карты, показанной на фиг. 9, на основе скорости R1fd изменения кривизны R целевой траектории. Хотя не показано на фиг. 4, в случае, если целевая величина Δθsft коррекции угла поворота при рулении передних колес быстро изменяется по абсолютной величине вследствие быстрого изменения скорости R1fd изменения кривизны R целевой траектории по абсолютной величине, целевая величина Δθsft коррекции может быть модифицирована таким образом, что она постепенно изменяется по абсолютной величине.
На этапе 260, целевая величина Δθsft коррекции угла поворота при рулении передних колес для вращения руля 20 на целевой угол θswt вращения вычисляется на основе целевого угла θswt вращения, передаточного отношения системы рулевого управления и т.п.
Процедура управления силой реакции при рулении
На этапе 310 в процедуре управления силой реакции при рулении, показанной на фиг. 5, вычисляются дифференциальное значение θfftd и дифференциальное значение θfftdd второго порядка конечного целевого угла θfft поворота при рулении передних колес, который вычисляется посредством суммирования целевого угла θft поворота при рулении передних колес и целевого угла θswt вращения посредством сумматора 310.
На этапе 320, усиливающий крутящий момент Tic для компенсации инерции системы рулевого управления и модуля 22 электрического усилителя рулевого управления вычисляется из карты, показанной на фиг. 10, на основе дифференциального значения θfftdd второго порядка конечного целевого угла θfft поворота при рулении передних колес.
На этапе 330, усиливающий крутящий момент Tdc для компенсации вязкости в системе рулевого управления и модуле 22 электрического усилителя рулевого управления вычисляется из карты, показанной на фиг. 11, на основе дифференциального значения θfftd конечного целевого угла θfft поворота при рулении передних колес.
На этапе 340, усиливающий крутящий момент Tfc для компенсации трения в системе рулевого управления и модуле 22 электрического усилителя рулевого управления вычисляется из карты, показанной на фиг. 12, на основе дифференциального значения θfftd конечного целевого угла θfft поворота при рулении передних колес.
На этапе 350, целевой угол θft поворота при рулении передних колес для управления траекторией обрабатывается посредством фильтра задержки второго порядка и опережения второго порядка, чтобы вычислять скорректированный по отклику целевой угол θftf поворота при рулении передних колес. Например, скорректированный по отклику целевой угол θftf поворота при рулении передних колес вычисляется в соответствии со следующей формулой 1. В формуле 1, s представляет оператор Лапласа, и a0-a2 и b0-b2 являются коэффициентами, определенными посредством технических требований транспортного средства и т.п.
На этапе 360, корректирующий крутящий момент Tlkaft на основе управления углом поворота при рулении передних колес вычисляется из карты, показанной на фиг. 13, на основе скорректированного по отклику целевого угла θftf поворота при рулении передних колес. Корректирующий крутящий момент Tlkaft является усиливающим крутящим моментом для управления углом поворота при рулении передних колес как равным целевому углу θft поворота при рулении в целях управления траекторией.
На этапе 370, целевой угол θrt поворота при рулении задних колес для управления траекторией обрабатывается посредством фильтра задержки второго порядка и опережения первого порядка, чтобы вычислять скорректированный по отклику целевой угол θrtf поворота при рулении задних колес. Например, скорректированный по отклику целевой угол θrtf поворота при рулении задних колес вычисляется в соответствии со следующей формулой 2. В формуле 2, s представляет оператор Лапласа, и b0-b2 и c0-c2 являются коэффициентами, определенными посредством технических требований транспортного средства и т.п.

На этапе 380, корректирующий крутящий момент Tlkart на основе управления углом поворота при рулении задних колес вычисляется из карты, показанной на фиг. 14, на основе скорректированного по отклику целевого угла θrtf поворота при рулении задних колес. Корректирующий крутящий момент Tlkart является усиливающим крутящим моментом для управления углом поворота при рулении задних колес как равным целевому углу θrt поворота при рулении в целях управления траекторией.
На этапе 390, сумма крутящих моментов Tic, Tdc, Tfc, Tlkaft и Tlkart, вычисленных на этапах 320-340, 360 и 380, вычисляется как целевой усиливающий крутящий момент Tlkat на основе управления траекторией, и сигнал, указывающий значение, выводится в блок 500 управления усиливающим крутящим моментом при рулении.
Процедура управления усиливающим крутящим моментом при рулении
На этапе 410 в процедуре управления усиливающим крутящим моментом при рулении, показанной на фиг. 6, целевой базовый усиливающий крутящий момент Tbaset для уменьшения нагрузки по рулению на водителя вычисляется из карты, показанной на фиг. 15, на основе крутящего момента Ts при рулении и скорости V транспортного средства.
На этапе 420, сумма целевого базового усиливающего крутящего момента Tbaset и целевого усиливающего крутящего момента Tlkat на основе управления траекторией вычисляется как конечный целевой усиливающий крутящий момент Tfat.
На этапе 430, модуль 22 электрического усилителя рулевого управления управляется таким образом, что усиливающий крутящий момент Ts при рулении соответствует конечному целевому усиливающему крутящему моменту Tfat.
Как следует понимать из вышеозначенного, в блоке 100 управления траекторией вычисляются целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес для обеспечения движения транспортного средства вдоль целевой траектории. В блоке 200 управления вращением руля вычисляется целевая величина Δθsft коррекции угла поворота при рулении передних колес для вращения руля 20, которая должна быть использована для того, чтобы оповещать относительно изменения направления движения транспортного средства до фактического изменения направления движения транспортного средства, вызываемого за счет управления траекторией.
Целевая величина Δθsft коррекции и целевой угол θft поворота при рулении (=θlkaft) переднего колеса суммируются посредством сумматора 310, чтобы вычислять конечный целевой угол θfft поворота при рулении передних колес. Модуль 14 варьирования угла поворота при рулении управляется таким образом, что угол θf поворота при рулении передних колес соответствует конечному целевому углу θfft поворота при рулении. Помимо этого, целевой угол θrt поворота при рулении (=θlkart) задних колес задается равным конечному целевому углу θfrt поворота при рулении, и угол θr поворота при рулении задних колес управляется таким образом, что он соответствует конечному целевому углу θfrt поворота при рулении.
В блоке 400 управления силой реакции при рулении вычисляется целевой усиливающий крутящий момент Tlkat для управления углом θf поворота при рулении передних колес как равным целевому углу θlkaft поворота при рулении управления траекторией без вращения руля 20. В блоке 500 управления усиливающим крутящим моментом при рулении сумма целевого базового усиливающего крутящего момента Tbaset для уменьшения нагрузки по рулению на водителя и целевого усиливающего крутящего момента Tlkat вычисляется как конечный целевой усиливающий крутящий момент Tfat. Помимо этого, модуль 22 электрического усилителя рулевого управления управляется таким образом, что усиливающий крутящий момент при рулении соответствует конечному целевому усиливающему крутящему моменту Tfat.
Соответственно, в то время как угол θr поворота при рулении задних колес управляется таким образом, что он соответствует конечному целевому углу θfrt поворота при рулении, который является идентичным целевому углу θlkart поворота при рулении задних колес управления траекторией, угол θf поворота при рулении передних колес управляется таким образом, что он соответствует конечному целевому углу θfft поворота при рулении, который является суммой целевого угла θlkaft поворота при рулении для управления траекторией и целевой величины Δθsft коррекции. Помимо этого, модуль 22 электрического усилителя рулевого управления управляется таким образом, что он достигает целевого усиливающего крутящего момента Tlkat, что позволяет управлять углами поворота при рулении передних и задних колес как равными целевым углам θlkaft и θlkart поворота при рулении, соответственно, для управления траекторией без вращения руля 20 совместно с модулем 14 варьирования угла поворота при рулении.
Таким образом, углы поворота при рулении передних и задних колес могут управляться как равные целевым углам θlkaft и θlkart поворота при рулении, соответственно, для управления траекторией, чтобы заставлять транспортное средство двигаться вдоль целевой траектории, и руль 20 может вращаться на целевой угол θswt вращения, который соответствует целевой величине Δθsft коррекции угла поворота при рулении передних колес. Следовательно, можно оповещать относительно изменения направления движения транспортного средства посредством вращения руля 20 до фактического изменения направления движения транспортного средства за счет управления траекторией.
Например, фиг. 16 является иллюстрацией, показывающей работу первого варианта осуществления относительно случая, в котором транспортное средство движется вдоль полосы движения, которая варьируется от прямой до левого поворота.
На фиг. 16, 80 и 82 представляют левую и правую белые линии дорожной разметки для полосы 84 движения, соответственно, и 86 представляет целевую траекторию, которая формируется посредством соединения средних позиций между левой и правой белыми линиями дорожной разметки 80 и 82. 88 представляет исходную позицию транспортного средства 12, которая может представлять собой, например, центр силы тяжести, и 90 представляет продольное направление транспортного средства. Помимо этого, на фиг. 16, 92 представляет нейтральное направление руля 20, так чтобы безусловно указывать позиции вращения руля 20, когда транспортное средство 12 находится в позициях P1-P4 движения.
Когда транспортное средство 12 движется по прямой (позиция P1 движения), целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес равны 0, и целевая величина Δθsft коррекции угла поворота при рулении передних колес также равна 0. Соответственно, угол θf поворота при рулении передних колес и угол θr поворота при рулении задних колес управляются как равные 0 согласно позициям, которые заставляют транспортное средство двигаться прямо, и руль 20 поддерживается в позиции нейтрали.
Когда транспортное средство 12 приближается к области поворота (позиция P2 движения), хотя целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес равны 0, целевая величина Δθsft коррекции угла поворота при рулении передних колес становится значением для левого поворота. Соответственно, в то время как угол θf поворота при рулении передних колес и угол θr поворота при рулении задних колес управляются как равные 0 согласно позициям, которые заставляют транспортное средство двигаться прямо, руль 20 поворачивается в направлении левого поворота на целевой угол θswt вращения, что оповещает пассажиров в транспортном средстве относительно того, что транспортное средство принудительно поворачивает влево за счет управления траекторией.
Когда транспортное средство 12 въезжает в область поворота (позиция P3 движения), целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес допускают значения для левого поворота, которые определяются согласно кривизне R целевой траектории 86, и целевая величина Δθsft коррекции угла поворота при рулении передних колес и целевой угол θswt вращения постепенно снижаются приблизительно до 0. Соответственно, угол θf поворота при рулении передних колес и угол θr поворота при рулении задних колес управляются как равные значениям для левого поворота, и руль 20 возвращается из позиции левого поворота в позицию практически нейтрали, что оповещает пассажиров в транспортном средстве относительно того, что состояние левого поворота транспортного средства не будет изменено за счет управления траекторией.
Когда транспортное средство 12 переходит в состояние стабильного поворота влево (позиция P4 движения), целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес поддерживаются равными значениям для левого поворота, которые определяются согласно кривизне R целевой траектории 86, и целевая величина Δθsft коррекции угла поворота при рулении передних колес и целевой угол θswt вращения поддерживаются равными приблизительно 0. Соответственно, угол θf поворота при рулении передних колес и угол θr поворота при рулении задних колес управляются как равные значениям для левого поворота, и руль 20 поддерживается в позиции практически нейтрали, что оповещает пассажиров в транспортном средстве относительно того, что будет поддерживаться текущее состояние левого поворота транспортного средства.
Второй вариант осуществления изобретения
Фиг. 17 является блок-схемой, иллюстрирующей общее управление приведением в движение транспортного средства во втором варианте осуществления устройства управления приведением в движение транспортного средства согласно настоящему изобретению. На фиг. 17, блоки, соответствующие блокам, показанным на фиг. 2, обозначаются посредством идентичных ссылок с номерами так, как показано на фиг. 2.
Во втором варианте осуществления, блок 600 управления углом относительно вертикальной оси транспортного средства предоставляется в дополнение к блоку 100 управления траекторией, блоку 200 управления вращением руля, блоку 400 управления силой реакции при рулении и блоку 500 управления усиливающим крутящим моментом при рулении. Следует отметить, что управление в каждом из блоков, за исключением блока 600 управления углом относительно вертикальной оси транспортного средства, является идентичным управлению в вышеописанном первом варианте осуществления.
Управление в блоке 600 управления углом относительно вертикальной оси транспортного средства выполняется в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 18, посредством узла управления приведением в движение транспортного средства электронного модуля 16 управления. Вычисляются целевые величины Δθyft и Δθyrt коррекции углов поворота при рулении передних и задних колес, которые используются для того, чтобы управлять углом φ относительно вертикальной оси транспортного средства за счет управления траекторией и оповещать пассажиров в транспортном средстве относительно того, что угол относительно вертикальной оси должен изменяться, и сигналы, указывающие значения, выводятся в сумматоры 320 и 330.
Целевая величина Δθyft коррекции угла поворота при рулении передних колес суммируется посредством сумматора 320 с целевым углом θlkaft поворота при рулении передних колес, чтобы вычислять целевой угол θft поворота при рулении передних колес. Сигнал, указывающий целевой угол θft поворота при рулении передних колес, выводится в сумматор 310, а также выводится в блок 400 управления силой реакции при рулении.
Аналогично, целевая величина Δθyrt коррекции угла поворота при рулении задних колес суммируется посредством сумматора 330 с целевым углом θlkart поворота при рулении задних колес, чтобы вычислять целевой угол θrt поворота при рулении задних колес. Сигнал, указывающий целевой угол θrt поворота при рулении задних колес, выводится в блок 400 управления силой реакции при рулении, а также выводится в качестве сигнала, указывающего конечный целевой угол θfrt поворота при рулении задних колес, в узел управления углом поворота при рулении электронного модуля 16 управления.
Процедура управления углом относительно вертикальной оси транспортного средства
Этапы 510-540 в процедуре управления углом относительно вертикальной оси транспортного средства, показанной на фиг. 18, выполняются аналогично этапам 210-240, соответственно, в вышеописанной процедуре управления вращением руля.
На этапе 550, целевая величина Δθyt управления углом относительно вертикальной оси транспортного средства для оповещения пассажиров в транспортном средстве относительно изменения направления движения транспортного средства за счет управления траекторией транспортного средства вычисляется из карты, показанной на фиг. 19, на основе скорости R1fd изменения кривизны R целевой траектории.
На этапе 560, целевые величины Δθyft и Δθyrt коррекции углов поворота при рулении передних и задних колес вычисляются, например, посредством фильтрации целевой величины Δθyt управления углом относительно вертикальной оси транспортного средства с помощью фильтра опережения первого порядка, и сигналы, указывающие значение, выводятся в сумматоры 320 и 330. Целевые величины Δθyft и Δθyrt коррекции углов поворота при рулении передних и задних колес могут быть вычислены в соответствии со следующими формулами 3 и 4. В формулах s представляет оператор Лапласа, и постоянные Kf и Kr времени являются константами, определенными посредством технических требований транспортного средства и т.п.
Δθyft=-(Kfs+1)*Δθyt... (3)
Δθyrt=-(Krs+1)*Δθyt... (4)
Следует понимать, что процедура управления углом относительно вертикальной оси транспортного средства, показанная на фиг. 18, может быть интегрирована с процедурой управления вращением руля, показанной на фиг. 4. Например, процедура может быть модифицирована таким образом, что этапы 550 и 560 выполняются после завершения этапа 250, показанного на фиг. 4.
Как следует понимать из вышеозначенного, во втором варианте осуществления, управление в каждом из блоков, за исключением блока 600 управления углом относительно вертикальной оси транспортного средства, выполняется аналогично вышеописанному первому варианту осуществления. Целевые величины Δθyft и Δθyrt коррекции углов поворота при рулении передних и задних колес, которые используются для того, чтобы управлять углом φ относительно вертикальной оси транспортного средства за счет управления траекторией, вычисляются посредством управления в блоке 600 управления углом относительно вертикальной оси транспортного средства.
Целевая величина Δθyft коррекции угла поворота при рулении передних колес суммируется посредством сумматора 320 с целевым углом θlkaft поворота при рулении передних колес, и сигналы, указывающие целевой угол θft поворота при рулении передних колес, вычисленный посредством суммирования, выводятся в сумматор 310 и блок 400 управления силой реакции при рулении. Аналогично, целевая величина Δθyrt коррекции угла поворота при рулении задних колес суммируется посредством сумматора 330 с целевым углом θlkart поворота при рулении задних колес, сигнал, указывающий целевой угол θrt поворота при рулении задних колес, вычисленный посредством суммирования, выводится в блок 400 управления силой реакции при рулении, а также выводится в качестве сигнала, указывающего конечный целевой угол θfrt поворота при рулении задних колес, в узел управления углом поворота при рулении электронного модуля 16 управления.
Соответственно, угол θf поворота при рулении передних колес управляется таким образом, что он соответствует конечному целевому углу θfft поворота при рулении, который является суммой целевого угла θlkaft поворота при рулении для управления траекторией, целевой величины Δθyft коррекции для управления углом относительно вертикальной оси и целевой величины Δθsft коррекции для управления углом вращения руля. Угол θr поворота при рулении задних колес управляется таким образом, что он соответствует конечному целевому углу θfrt поворота при рулении, который является суммой целевого угла θlkaft поворота при рулении задних колес управления траекторией и целевой величины Δθyrt коррекции для управления углом относительно вертикальной оси. Помимо этого, модуль 22 электрического усилителя рулевого управления управляется таким образом, что он достигает целевого усиливающего крутящего момента Tlkat, что позволяет управлять углами поворота при рулении передних и задних колес как равными целевому углу θft и θrt поворота при рулении, соответственно, которые являются суммой целевого угла поворота при рулении передних и задних колес для управления траекторией и целевой величины коррекции для управления углом относительно вертикальной оси, без вращения руля 20 совместно с модулем 14 варьирования угла поворота при рулении.
Таким образом, углы поворота при рулении передних и задних колес могут управляться таким образом, чтобы заставлять транспортное средство двигаться вдоль целевой траектории с помощью управления углом относительно вертикальной оси транспортного средства, и руль 20 может вращаться на целевой угол θswt вращения, который соответствует целевой величине Δθsft коррекции угла поворота при рулении передних колес. Следовательно, можно оповещать пассажиров в транспортном средстве относительно того, что направление движения транспортного средства должно быть изменено посредством вращения руля 20 и угла относительно вертикальной оси транспортного средства до фактического изменения направления движения транспортного средства за счет управления траекторией. Таким образом, может выполняться оповещение, которое является более эффективным, чем оповещение в первом варианте осуществления.
Например, фиг. 20 является иллюстрацией, показывающей работу второго варианта осуществления относительно случая, в котором транспортное средство движется вдоль полосы движения, которая варьируется от прямой до левого поворота. Следует отметить, что на фиг. 20 части, соответствующие частям, показанным на фиг. 16, обозначаются посредством идентичных ссылок с номерами так, как показано на фиг. 16.
Когда транспортное средство 12 движется по прямой (позиция P1 движения), целевые углы θlkaft и θlkart поворота при рулении передних и задних колес равны 0; целевые величины Δθyft и Δθyft коррекции передних и задних колес для управления углом относительно вертикальной оси равны 0; и целевая величина Δθsft коррекции угла поворота при рулении передних колес также равна 0. Соответственно, угол θf поворота при рулении передних колес и угол θr поворота при рулении задних колес управляются как равные 0 согласно позициям, которые заставляют транспортное средство двигаться прямо; руль 20 поддерживается в позиции нейтрали; и угол относительно вертикальной оси транспортного средства поддерживается равным 0.
Когда транспортное средство 12 приближается к области поворота (позиция P2 движения), хотя целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес равны 0, целевые величины Δθyft и Δθyft коррекции передних и задних колес для управления углом относительно вертикальной оси допускают значения, которые составляют угол относительно вертикальной оси транспортного средства влево, и целевая величина Δθsft коррекции угла поворота при рулении передних колес допускает значение для левого поворота. Соответственно, в то время как угол θf поворота при рулении передних колес и угол θr поворота при рулении задних колес управляются как равные значениям, которые заставляют транспортное средство поворачивать вправо и влево, соответственно, приводя к тому, что угол относительно вертикальной оси транспортного средства управляется влево, и руль 20 поворачивается в направлении левого поворота на целевой угол θswt вращения. Следовательно, посредством угла относительно вертикальной оси транспортного средства и вращения руля 20, пассажиры в транспортном средстве оповещаются относительно того, что транспортное средство принудительно поворачивает влево, за счет управления траекторией.
Когда транспортное средство 12 въезжает в область поворота (позиция P3 движения), целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес допускают значения для левого поворота, которые определяются согласно кривизне R целевой траектории 86. Целевая величина Δθsft коррекции угла поворота при рулении передних колес и целевой угол θswt вращения постепенно снижаются приблизительно до 0. Соответственно, угол θf поворота при рулении передних колес и угол θr поворота при рулении задних колес постепенно уменьшаются от значений для правого поворота и левого поворота, соответственно, и руль 20 возвращается из позиции левого поворота в позицию практически нейтрали, что оповещает пассажиров в транспортном средстве относительно того, что состояние левого поворота транспортного средства не будет изменено за счет управления траекторией.
Когда транспортное средство 12 переходит в состояние стабильного поворота влево (позиция P4 движения), целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес поддерживаются равными значениям для левого поворота, которые определяются согласно кривизне R целевой траектории 86. Целевые величины Δθyft и Δθyft коррекции передних и задних колес для управления углом относительно вертикальной оси, целевая величина Δθsft коррекции угла поворота при рулении передних колес и целевой угол θswt вращения поддерживаются равными 0. Соответственно, угол θf поворота при рулении передних колес и угол θr поворота при рулении задних колес управляются как равные значениям для левого поворота, и руль 20 поддерживается в позиции практически нейтрали, что оповещает пассажиров в транспортном средстве относительно того, что будет поддерживаться текущее состояние левого поворота транспортного средства.
Третий вариант осуществления изобретения
В третьем варианте осуществления, управление в каждом из блоков, за исключением блока 100 управления траекторией, показанного на фиг. 17, выполняется аналогично вышеописанному второму варианту осуществления. Иными словами, операции управления в блоке 200 управления вращением руля, блоке 400 управления силой реакции при рулении и блоке 500 управления усиливающим крутящим моментом при рулении, а также блоке 600 управления углом относительно вертикальной оси транспортного средства выполняются аналогично вышеописанному второму варианту осуществления.
Управление в блоке 100 управления траекторией выполняется в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 21, посредством узла управления приведением в движение транспортного средства электронного модуля 16 управления. При управлении траекторией транспортного средства задается целевая траектория транспортного средства, и принимается решение в отношении того, ответвляется или нет полоса движения, которая располагается вдоль целевой траектории. Когда принимается такое решение, что полоса движения ответвляется, принимается решение в отношении того, должна или нет быть изменена целевая траектория, посредством определения намерения водителя касательно изменения курса движения. Кроме того, когда принимается такое решение, что целевая траектория должна быть изменена, она изменяется на траекторию, которая располагается вдоль курса движения, требуемого водителем. Следует отметить, что разветвленная полоса движения в настоящей заявке означает полосу движения, в которой курс движения разветвляется на множество курсов движения, к примеру, Y-образную дорогу, пересекающую дорогу и т.п.
Фиг. 22 показывает пример ответвляющейся полосы движения (Y-образной дороги). В ответвляющейся полосе движения, показанной на фиг. 22, курс 94 движения в полосе 84 движения ответвляется с Y-образной конфигурацией в точке Q1 разветвления на курс 94A в полосе 84A движения и курс 94B в полосе 84B движения. Точка Q2 представляет конечную точку ответвления, т.е. точку, дальше которой транспортное средство не может изменять свой курс движения. В нижеприведенном описании, предполагается, что курсы 94 и 94A движения представляют собой текущую целевую траекторию, и когда принимается такое решение, что целевая траектория должна быть изменена, она изменяется на курс 94B движения.
Фиг. 23 показывает пример ответвляющейся дороги, в котором курс движения ответвляется внутри дороги. В ответвляющейся дороге, показанной на фиг. 23, полоса 84 движения имеет два курса движения, которые частично разделяются посредством разделительной полосы 96, и курс 94 движения разветвляется в точке Q1 разветвления на курсы 94C и 94D движения. Следует отметить, что позиция точки Q1 разветвления варьируется согласно скорости V транспортного средства, ширине дороги и т.п., и конечная точка Q2 ответвления определяется посредством позиции ближнего конца разделительной полосы 96.
В третьем варианте осуществления, когда принимается такое решение, что дорога разветвляется, поперечная позиция транспортного средства смещается, чтобы заставлять транспортное средство переходить на курс движения, который ближе к текущей целевой траектории из множества курсов движения дальше точки разветвления. Принимается решение в отношении того, имеет или нет водитель намерение изменять курс движения, на основе операции вождения, выполняемой водителем относительно вышеуказанного поперечного смещения транспортного средства. Когда принимается такое решение, что водитель имеет намерение изменять курс движения, определяется то, что целевая траектория должна быть изменена на основе решения.
Процедура управления траекторией
Этапы 710 и 720 в процедуре управления траекторией, показанной на фиг. 21, выполняются аналогично этапам 110 и 120, соответственно, в процедуре управления траекторией (фиг. 3) в вышеописанном первом варианте осуществления. Тем не менее, когда принимается положительное решение на этапе 720, управление переходит к этапу 730.
На этапе 730, полоса движения впереди транспортного средства определяется посредством анализа и т.п. информации изображений участка спереди, захваченной посредством CCD-камеры 58. Целевая траектория задается на основе определенной полосы движения и целевого маршрута, заданного посредством навигационного модуля и т.п.
На этапе 740, участок определения ответвляющейся дороги, который используется для того, чтобы определять то, существует или нет ответвление в дороге впереди транспортного средства, задается как участок, расположенный, например, между позицией, отстоящей впереди на Lmin, и позицией, отстоящей впереди на Lmax, от текущей позиции. Lmin и Lmax переменно задаются на основе скорости V транспортного средства таким образом, что они увеличиваются по мере того, как возрастает скорость V транспортного средства. Следует отметить, что Lmax задается равным значению, которое превышает длину нижеописанного участка определения намерения водителя, и Lmin задается равным значению, которое меньше Lmax.
На этапе 750 принимается решение в отношении того, существует или нет ответвление на участке определения ответвляющейся дороги, на основе результатов анализа информации изображений участка спереди, захваченной посредством CCD-камеры 58, и информации, отправленной из навигационного модуля и т.п. Когда принимается отрицательное решение, поскольку целевая траектория не должна быть изменена, управление переходит к этапу 910, при этом, когда принимается положительное решение, управление переходит к этапу 800. Следует отметить, что если уже принято такое решение, что существует ответвление, управление переходит к этапу 800 без принятия решения в отношении наличия ответвления на этапе 750.
На этапе 800 принимается решение в отношении того, должна или нет быть изменена целевая траектория, в соответствии с блок-схемами последовательности операций способа, показанными на фиг. 24-27. Когда принимается отрицательное решение, управление переходит к этапу 910, при этом, когда принимается положительное решение, управление переходит к этапу 900. Следует отметить, что если уже принято такое решение, что целевая траектория должна быть изменена, управление переходит к этапу 910 без принятия решения в отношении необходимости изменения на этапе 800.
На этапе 900, целевая траектория изменяется на другую траекторию, разветвляемую от текущей траектории, в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 28. Например, в ответвляющейся дороге, показанной на фиг. 22, целевая траектория изменяется с траектории курса 94A движения на траекторию курса 94B движения.
На этапе 910 вычисляются целевой угол θlkaft поворота при рулении передних колес и целевой угол θlkart поворота при рулении задних колес для обеспечения соответствия траектории транспортного средства целевой траектории, и вычисляется целевой угол θswt вращения руля 20. Целевые углы θlkaft и θlkart поворота при рулении и целевой угол θswt вращения могут быть вычислены аналогично первому и второму варианту осуществления либо могут быть вычислены любыми другими способами. Модуль 14 варьирования угла поворота при рулении и модули 22 и 44 электрического усилителя рулевого управления управляются таким образом, что углы θf поворота при рулении и θr передних и задних колес соответствуют конечным целевым углам θfft поворота при рулении и θfrt, соответственно, которые управляют транспортным средством таким образом, что оно движется вдоль целевой траектории.
Управляющая процедура для определения необходимости изменения целевой траектории
Перед описанием процедуры для определения необходимости изменения целевой траектории с рассмотрением в качестве примера ответвляющейся дороги, показанной фиг. 22, и со ссылкой на фиг. 29, приводятся пояснения касательно настроек участка для обеспечения возможности изменения целевой траектории и участка для определения намерения водителя.
Как показано на фиг. 29, позиция Q3, которая отстоит на расстояние Lp на этой стороне точки Q1 разветвления, задается равной начальной точке участка Scp для обеспечения возможности изменения целевой траектории и участка Sid для определения намерения водителя. Точка Q1 разветвления задается равной конечной точке участка Sid для определения намерения водителя. Кроме того, как показано на фиг. 29, если транспортное средство 12 проезжает точку Q1 разветвления далеко вперед, изменение курса движения не может осуществляться на этой стороне конечной точки Q2 ответвления с курса 94A движения на курс 94B движения или наоборот. Точки Q4 и Q5, которые являются самыми дальними от точки Q1 разветвления в области, в которой разрешается изменение курса движения, называются "конечной точкой" участка Scp для обеспечения возможности изменения целевой траектории. Следует отметить, что расстояние Lp переменно задается таким образом, что оно увеличивается по мере того, как возрастает скорость V транспортного средства. Конечные точки Q4 и Q5 участка Scp для обеспечения возможности изменения целевой траектории переменно задаются таким образом, что они приближаются к точке Q1 разветвления по мере того, как возрастает скорость V транспортного средства, угол между разветвленными полосами движения увеличивается, и ширина полосы движения увеличивается.
Далее, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 24, поясняется управляющая процедура для определения необходимости изменения целевой траектории, выполненная на этапе 800.
Во-первых, на этапе 810 задается участок для обеспечения возможности изменения целевой траектории, если какой-либо участок для обеспечения возможности изменения целевой траектории не задан. Участок для обеспечения возможности изменения целевой траектории является участком, на котором может изменяться целевая траектория, и изменение целевой траектории запрещается в областях на этой стороне и дальше участка.
На этапе 820 принимается решение в отношении того, находится или нет транспортное средство на участке Scp для обеспечения возможности изменения целевой траектории. Когда принимается отрицательное решение, поскольку изменение целевой траектории не разрешается, управление переходит к этапу 910, при этом, когда принимается положительное решение, управление переходит к этапу 830.
На этапе 830 принимается решение в отношении того, находится или нет транспортное средство на этой стороне точки Q1 разветвления, т.е. в отношении того, находится или нет транспортное средство на участке Sid для определения намерения водителя. Когда принимается отрицательное решение, управление переходит к этапу 860, при этом, когда принимается положительное решение, управление переходит к этапу 840.
На этапе 840, поперечная позиция и т.п. транспортного средства относительно полосы движения варьируется на основе текущей целевой траектории в соответствии с блок-схемой последовательности операций способа, показанной на нижеописанной фиг. 25, что оповещает пассажиров в транспортном средстве относительно того, что разветвленная полоса движения существует.
На этапе 850, в случае, если транспортное средство еще не проехало точку Q1 разветвления, принимается решение в отношении намерения водителя касательно выбора курса движения в соответствии с блок-схемой последовательности операций способа, показанной на нижеописанной фиг. 26. Иными словами, принимается решение в отношении того, по какому курсу движения хочет ехать водитель.
На этапе 860, в случае, если транспортное средство проезжает точку Q1 разветвления, принимается решение в отношении конечного намерения водителя касательно выбора курса движения в соответствии с блок-схемой последовательности операций способа, показанной на нижеописанной фиг. 27.
На этапе 870 принимается решение в отношении того, хочет или нет водитель изменять курс движения, на основе взаимосвязи между курсом движения, по которому хочет ехать водитель, и текущей целевой траекторией. Когда принимается положительное решение, управление переходит к этапу 900, при этом, когда принимается отрицательное решение, управление переходит к этапу 910.
Управляющая процедура для оповещения относительно наличия ответвляющейся полосы движения
На этапе 841 на блок-схеме последовательности операций способа, показанной на фиг. 25, который показывает управляющую процедуру для оповещения относительно наличия ответвляющейся полосы движения, принимается решение в отношении того, находится или нет целевая траектория, которой следует транспортное средство после того, как оно проезжает точку Q1 разветвления, в левой стороне текущего направления движения. Когда принимается положительное решение, управление переходит к этапу 843, при этом, когда принимается отрицательное решение, управление переходит к этапу 842.
На этапе 842 принимается решение в отношении того, находится или нет целевая траектория, которой следует транспортное средство после того, как оно проезжает точку разветвления, в правой стороне текущего направления движения. Когда принимается положительное решение, управление переходит к этапу 844, при этом, когда принимается отрицательное решение, управление переходит к этапу 845.
На этапе 843, целевые углы θlkaft и θlkart поворота при рулении передних и задних колес и целевой угол θswt вращения руля 20 вычисляются таким образом, что углы заставляют транспортное средство 12 двигаться вдоль текущей целевой траектории в состоянии, в котором транспортное средство смещается влево относительно текущей целевой траектории. Например, как показано посредством стрелки с пунктирной линией на фиг. 29, целевые углы поворота при рулении передних и задних колес и целевой угол вращения руля 20 вычисляются таким образом, что углы заставляют транспортное средство 12 сначала немного поворачивать влево, а после этого немного поворачивать вправо, чтобы за счет этого двигаться вдоль полосы 84 движения в состоянии, в котором транспортное средство смещается влево.
На этапе 844, целевые углы θlkaft и θlkart поворота при рулении передних и задних колес и целевой угол θswt вращения руля 20 вычисляются таким образом, что углы заставляют транспортное средство 12 двигаться вдоль текущей целевой траектории в состоянии, в котором транспортное средство смещается вправо относительно текущей целевой траектории.
На этапе 845, целевые углы θlkaft и θlkart поворота при рулении передних и задних колес вычисляются таким образом, что углы не допускают смещения транспортного средства 12 влево или вправо относительно текущей целевой траектории. Целевой угол θswt вращения руля 20 вычисляется равным 0, так что руль не вращается.
Управляющая процедура для определения намерения водителя
На этапе 851 на блок-схеме последовательности операций способа, показанной на фиг. 26, который показывает управляющую процедуру для определения намерения водителя, вычисляется угловая скорость θd руления, которая является дифференциальным значением угла θ поворота при рулении. Принимается решение в отношении того, по какой полосе движения хочет ехать водитель, из текущей полосы движения, левой ответвляющейся полосы движения и правой ответвляющейся полосы движения, в соответствии с картой, показанной на фиг. 30, на основе угла θ поворота при рулении, угловой скорости θd руления и информации в отношении того, что разветвленная полоса движения находится слева, справа или с обеих сторон. Когда полоса движения, по которой хочет ехать водитель, является текущей полосой движения, флаг Fs задается равным 0. Когда полоса движения, по которой хочет ехать водитель, является левой ответвляющейся полосой движения, флаг Fs задается равным 1. Когда полоса движения, по которой хочет ехать водитель, является правой ответвляющейся полосой движения, флаг Fs задается равным -1.
На этапе 852 вычисляется скорость Tsd изменения крутящего момента при рулении, которая является дифференциальным значением крутящего момента Ts при рулении. Принимается решение в отношении того, по какой полосе движения хочет ехать водитель, из текущей полосы движения, левой ответвляющейся полосы движения и правой ответвляющейся полосы движения, в соответствии с картой, показанной на фиг. 31, на основе крутящего момента Ts при рулении, скорости Tsd изменения крутящего момента при рулении и информации в отношении того, что разветвленная полоса движения находится слева, справа или с обеих сторон. Когда полоса движения, по которой хочет ехать водитель, является текущей полосой движения, флаг Ft задается равным 0. Когда полоса движения, по которой хочет ехать водитель, является левой ответвляющейся полосой движения, флаг Ft задается равным 1. Когда полоса движения, по которой хочет ехать водитель, является правой ответвляющейся полосой движения, флаг Ft задается равным -1.
На этапе 854, флаг F, который является индексом намерения водителя изменять курс движения, вычисляется в соответствии со следующей формулой 5. Коэффициенты Ks и Kt в формуле 5 больше 0 и меньше 1, к примеру, равны 0,5, например, и сумма Ks и Kt равна 1.
F=Ks*Fs+Kt*Ft... (5)
На этапе 855 принимается решение в отношении того, меньше или нет флаг F положительного опорного значения Fp, которое равно 1 или положительной константе, немного меньшей 1. Когда принимается отрицательное решение, управление переходит к этапу 857, при этом, когда принимается положительное решение, управление переходит к этапу 856, на котором принимается такое решение, что водитель хочет изменять курс движения на левую ответвляющуюся полосу движения.
На этапе 857 принимается решение в отношении того, превышает или нет флаг F отрицательное опорное значение Fn, которое равно -1 или отрицательной константе, немного большей -1. Когда принимается положительное решение, управление переходит к этапу 858, на котором принимается такое решение, что водитель хочет изменять курс движения на правую ответвляющуюся полосу движения, при этом, когда принимается отрицательное решение, управление переходит к этапу 859, на котором принимается такое решение, что водитель не хочет изменять курс движения.
Управляющая процедура для определения конечного намерения водителя
Этапы 861 и 862 на блок-схеме последовательности операций способа, показанной на фиг. 27, который показывает управляющую процедуру для определения конечного намерения водителя, выполняются аналогично этапам 851 и 852, соответственно, на блок-схеме последовательности операций способа, показанной на фиг. 26. Следует отметить, что решения на этапе 861 и 862 принимаются с использованием карт, показанных на фиг. 32 и 33, соответственно. Абсолютные величины пороговых значений на картах, показанных на фиг. 32 и 33, превышают абсолютные величины на картах, показанных на фиг. 30 и 31.
На этапе 863, который выполняется после этапа 862, принимается решение в отношении того, по какой полосе движения хочет ехать водитель, из текущей полосы движения, левой ответвляющейся полосы движения и правой ответвляющейся полосы движения. Когда полоса движения, по которой хочет ехать водитель, является текущей полосой движения, флаг Ff задается равным 0. Когда полоса движения, по которой хочет ехать водитель, является левой ответвляющейся полосой движения, флаг Ff задается равным 1. Когда полоса движения, по которой хочет ехать водитель, является правой ответвляющейся полосой движения, флаг Ff задается равным -1.
На фиг. 34, например, 94AL и 94AR представляют целевые траектории левой и правой разветвленных полос движения, соответственно. Q2L и Q2R представляют конечную точку левой ответвляющейся полосы 94AL движения и конечную точку правой ответвляющейся полосы 94AR движения, соответственно. Таким образом, принимается решение в отношении того, по какой полосе движения хочет ехать водитель, из текущей полосы движения, левой ответвляющейся полосы движения и правой ответвляющейся полосы движения, на основе точки транспортного средства на текущей целевой траектории 94, позиции конечной точки Q2L или Q2R ответвления, угла θ поворота при рулении и угловой скорости θd руления.
На этапе 864, флаг F, который является индексом намерения водителя изменять курс движения, вычисляется в соответствии со следующей формулой 6. Коэффициенты Ks, Kt и Kf в формуле 6 больше 0 и равны или меньше 0,4, к примеру, равны 0,3, 0,3 и 0,4, соответственно, и сумма Ks, Kt и Kf равна 1.
F=Ks*Fs+Kt*Ft+Kf*Ff... (6)
Этапы 865-869 выполняются аналогично этапам 855-859, соответственно, показанным на фиг. 26. Таким образом, определяется конечное намерение водителя относительно изменения полосы движения.
Следует отметить, что этапы 861 и 862 могут опускаться, и флаг F может быть заменен флагом Ff. Этап 863 может опускаться, и флаг F может быть вычислен в соответствии с вышеприведенной формулой 5.
Управляющая процедура для изменения целевой траектории
На этапе 901 на блок-схеме последовательности операций способа, показанной на фиг. 28, который показывает управляющую процедуру для изменения целевой траектории, принимается решение в отношении того, завершено или нет изменение целевой траектории, посредством определения, например, того, становится или нет весовой коэффициент Ws, описанный ниже, равным 1. Когда принимается положительное решение, управление переходит к этапу 910, при этом, когда принимается отрицательное решение, управление переходит к этапу 902.
На этапе 902 принимается решение в отношении того, инициировано или нет вычисление степени Ds отклонения, описанной ниже. Когда принимается положительное решение, управление переходит к этапу 905, при этом, когда принимается отрицательное решение, управление переходит к этапу 903.
На этапе 903 принимается решение в отношении того, находится или нет текущая позиция транспортного средства 12 на этой стороне точки Q1 разветвления ответвляющейся полосы движения. Когда принимается положительное решение, на этапе 904 целевая траектория, по которой едет транспортное средство 12 после проезда точки Q1 разветвления, изменяется на траекторию курса движения, который определяется на этапе 850 или 860, по которому хочет ехать водитель, при этом, когда принимается отрицательное решение, управление переходит к этапу 905.
На этапе 905 вычисляется степень Ds отклонения, которая является индексом, указывающим необходимость изменения целевой траектории. На карте, показанной на фиг. 32, на которой опорная линия представляется посредством границы между областью, где Fs=0, и областью, где Fs=1 или -1, степень Ds отклонения является значением, указывающим расстояние между координатами угла θ поворота при рулении и угловой скорости θd руления и опорной линией. На этапе 905, максимальная степень Dsmax отклонения вычисляется как значение, которое допускает степень Ds отклонения, когда значение ΔDs увеличения степени Ds отклонения каждого цикла становится равным или меньшим опорного значения ΔDs0 (положительной константы, близкой к 0).
Следует отметить, что степень Ds отклонения вычисляется таким образом, что она увеличивается в качестве кривизны пути, который прокладывает транспортное средство в ответ на изменение целевой траектории. Например, степень Ds отклонения вычисляется таким образом, что она увеличивается по мере того, как увеличивается угол между двумя полосами движения ответвляющейся полосы движения; она увеличивается по мере того, как сокращается расстояние между точкой Q1 разветвления и конечной точкой Q2; и она увеличивается по мере того, как сокращается ширина полосы движения. В ответвляющейся полосе движения, показанной на фиг. 29, степень Ds отклонения вычисляется таким образом, что она является более высокой, когда целевая траектория изменяется с 94B на 94A, по сравнению со случаем, когда целевая траектория изменяется с 94A на 94B.
На этапе 906, весовой коэффициент Ws для целевой траектории после изменения вычисляется из карты, показанной на фиг. 35, на основе максимальной степени Dsmax отклонения, скорости V транспортного средства и истекшего времени tc. Как показано на фиг. 35, весовой коэффициент Ws вычисляется таким образом, что он варьируется от 0 до 1 максимально быстро по мере того, как увеличивается максимальная степень Dsmax отклонения, и по мере того, как возрастает скорость V транспортного средства. Помимо этого, весовой коэффициент Ws вычисляется таким образом, что он становится равным 1 до того, как транспортное средство 12 достигает конечной точки Q4 или Q5 участка Scp для обеспечения возможности изменения целевой траектории, показанной на фиг. 29.
На этапе 907, целевая траектория постепенно изменяется в соответствии с весовым коэффициентом Ws с текущей целевой траектории на целевую траекторию курса движения, по которому хочет ехать водитель. Например, если кривизны текущей целевой траектории и целевой траектории курса движения, по которому хочет ехать водитель, представлены посредством Rpre и Rnew, соответственно, которые являются функциями от времени, кривизна Rins предварительной траектории для изменения целевой траектории вычисляется в соответствии со следующей формулой 7.
Rins=(1-Ws)*Rpre+Ws*Rnew... (7)
Как следует понимать из вышеозначенного, в третьем варианте осуществления, на этапе 750 на блок-схеме последовательности операций способа, показанной на фиг. 21, принимается решение в отношении того, существует или нет ответвление в полосе движения, соответствующей целевой траектории. Когда принимается такое решение, что существует ответвление, на этапе 800 принимается решение в отношении того, хочет или нет водитель изменять курс движения, и целевая траектория должна быть изменена. Помимо этого, когда принимается такое решение, что целевая траектория должна быть изменена, на этапе 900 целевая траектория изменяется таким образом, что она становится траекторией курса движения, соответствующего намерению водителя.
Следовательно, согласно третьему варианту осуществления, даже в случае, если водитель хочет ехать по другой полосе движения, которая не соответствует целевой траектории, по причинам изменения намерений или дорожных условий, в случае, если транспортное средство приближается к ответвлению полосы движения, целевая траектория может сбрасываться в соответствии с намерением водителя. Таким образом, даже в случае, если транспортное средство приближается к ответвлению полосы движения, и водитель хочет изменять курс движения, транспортное средство может надежно принудительно двигаться вдоль целевой траектории, которая отражает намерение водителя.
С учетом вышеизложенного, третий вариант осуществления может считаться технической идеей относительно "устройства управления приведением в движение транспортного средства, которое заставляет транспортное средство двигаться вдоль целевой траектории, при этом принимается решение в отношении того, существует или нет ответвление полосы движения впереди транспортного средства; когда ответвление полосы движения существует, принимается решение в отношении того, хочет или нет водитель изменять целевую траекторию; и изменение целевой траектории управляется в соответствии с тем, имеет или нет водитель намерение изменять целевую траекторию".
Согласно третьему варианту осуществления, на этапе 810 на блок-схеме последовательности операций способа, показанной на фиг. 24, задается участок для обеспечения возможности изменения целевой траектории. Когда транспортное средство движется на этой стороне точки Q1 разветвления ответвляющейся полосы движения на участке для обеспечения возможности изменения целевой траектории, положительные решения принимаются на этапе 820 и 830. Затем, на этапе 840, пассажиры в транспортном средстве оповещаются относительно того, что существует ответвление, посредством варьирования поперечной позиции и т.п. транспортного средства относительно полосы движения на основе текущей целевой траектории. Помимо этого, на этапе 850 принимается решение в отношении намерения водителя касательно выбора курса движения, и на этапе 870 принимается решение в отношении того, хочет или нет водитель изменять курс движения.
Следовательно, можно определять намерение водителя касательно выбора курса движения более положительно и более точно по сравнению со случаем, когда поперечные позиции и т.п. транспортного средства относительно полосы движения не варьируются, т.е. когда пассажиры не оповещаются относительно того, что существует ответвление.
Согласно третьему варианту осуществления, в случае, если транспортное средство движется на участке для обеспечения возможности изменения целевой траектории, но уже проехало точку Q1 разветвления ответвляющейся полосы движения, положительное и отрицательное решения принимаются на этапах 820 и 830, соответственно. Соответственно, на этапе 860, в случае, если транспортное средство проезжает точку Q1 разветвления, принимается решение в отношении конечного намерения водителя касательно выбора курса движения, и на этапе 870 на основе результата решения принимается решение в отношении того, хочет или нет водитель изменять курс движения.
Следовательно, вероятность того, что изменение курса движения и изменение целевой траектории, сопутствующее ему, осуществляется в соответствии с намерением водителя, может более точно определяться по сравнению со случаем, когда управление переходит к этапу 910 без выполнения этапов 860 и 870, когда принимается отрицательное решение на этапе 830. Другими словами, управление приведением в движение транспортного средства может осуществляться с учетом намерения водителя в большей степени по сравнению со случаем, когда не принимается решение в отношении конечного намерения водителя касательно выбора курса движения, в случае, если транспортное средство проезжает точку Q1 разветвления.
Согласно третьему варианту осуществления, когда транспортное средство 12 движется на этой стороне точки Q1 разветвления, положительное решение принимается на этапе 903 на блок-схеме последовательности операций способа, показанной на фиг. 28, и на этапе 904 целевая траектория быстро изменяется на траекторию курса движения, по которому хочет ехать водитель. Соответственно, целевая траектория может быть изменена на траекторию курса движения, по которому хочет ехать водитель, одновременно с тем, когда транспортное средство 12 проезжает точку Q1 разветвления.
Согласно третьему варианту осуществления, когда целевая траектория должна быть изменена, в случае, если транспортное средство 12 проезжает точку Q1 разветвления, отрицательное решение принимается на этапе 903, и целевая траектория изменяется на этапах 905-907. В частности, на этапе 905 вычисляются степень Ds отклонения, которая является индексом, указывающим необходимость изменения целевой траектории, и максимальная степень Dsmax отклонения, которая является ее максимальным значением, и весовой коэффициент Ws для целевой траектории после изменения вычисляется таким образом, что весовой коэффициент становится равным 1 максимально быстро по мере того, как увеличивается максимальная степень Dsmax отклонения.
Следовательно, как показано на фиг. 36(A), можно изменять углы поворота при рулении передних и задних колес быстрее, чтобы за счет этого положительно изменять курс движения по мере роста необходимости управления скоростью при изменении направления транспортного средства таким образом, чтобы изменять курс движения. Напротив, как показано на фиг. 36(B), можно изменять углы поворота при рулении передних и задних колес более аккуратно, чтобы за счет этого снижать риск быстрого изменения направления транспортного средства и некомфортного ощущения, которое испытывают пассажиры в транспортном средстве вследствие быстрого изменения.
Как уже описано, согласно первому-третьему вариантам осуществления, усиливающий крутящий момент Tic для компенсации инерции системы рулевого управления и модуля 22 электрического усилителя рулевого управления вычисляется на основе дифференциального значения θfftdd второго порядка конечного целевого угла θfft поворота при рулении передних колес. Усиливающие крутящие моменты Tdc и Tfc для компенсации вязкости и трения, соответственно, в системе рулевого управления и модуле 22 электрического усилителя рулевого управления вычисляются на основе дифференциального значения θfftd конечного целевого угла θfft поворота при рулении передних колес.
Следовательно, целевой усиливающий крутящий момент Tlkat может быть вычислен, с уменьшением влияния инерции и т.п., сопутствующей работе модуля 2 электрического усилителя рулевого управления, по сравнению со случаем, когда усиливающий крутящий момент Tic и т.п. вычисляются на основе целевых углов θft и θrt поворота при рулении передних и задних колес. Соответственно, углы поворота при рулении передних и задних колес и вращение руля 20 могут управляться более точно по сравнению со случаем, когда целевой усиливающий крутящий момент Tlkat вычисляется без учета целевой величины Δθsft коррекции угла поворота при рулении передних колес, вычисленной на основе целевого угла θswt вращения.
Согласно первому-третьему вариантам осуществления, средство оповещения (поперечное смещение) в третьем варианте осуществления отличается от средств оповещения в первом и втором вариантах осуществления. Соответственно, даже в случае, если первый или второй вариант осуществления применяется к варианту осуществления в сочетании с третьим вариантом осуществления, пассажиры в транспортном средстве могут распознавать оповещение с различением того, касается оно изменения кривизны полосы движения или касается ответвляющейся полосы движения.
В первом-третьем вариантах осуществления не учитывается поперечное смещение транспортного средства относительно центра полосы движения, когда вычисляется целевой угол вращения руля 20. Тем не менее, в случае, если транспортное средство поперечно смещается относительно центра полосы движения, если такое оповещение выдается, когда транспортное средство значительно смещается или поворачивает в направлении, идентичном поперечному смещению, пассажиры в транспортном средстве могут испытывать значительное беспокойство.
Следовательно, предпочтительно величины при варьировании рабочей позиции средства ввода для руления, угла относительно вертикальной оси позиции транспортного средства и поперечной позиции транспортного средства переменно задаются в соответствии со смещением транспортного средства таким образом, что величины становятся меньшими, когда изменения выполняются в направлении, которое увеличивает смещение транспортного средства, по сравнению со случаем, когда изменения выполняются в противоположном направлении.
Например, в первом варианте осуществления, на этапе 250, целевой угол θswt вращения руля 20 вычисляется с учетом смещения транспортного средства. Во втором варианте осуществления, на этапе 550, целевая величина Δθyt управления углом относительно вертикальной оси транспортного средства вычисляется с учетом смещения транспортного средства. В третьем варианте осуществления, на этапе 843 или 844, целевые углы θlkaft и θlkart поворота при рулении передних и задних колес и целевой угол θswt вращения руля 20 вычисляются с учетом смещения транспортного средства. Согласно этим конфигурациям, в случае, если транспортное средство поперечно смещается относительно центра полосы движения, можно не допускать выдачу оповещения, которое значительно перемещает транспортное средство к стороне смещения, чтобы за счет этого снижать риск того, что пассажиры в транспортном средстве испытывают значительное беспокойство.
В первом-третьем вариантах осуществления целевой угол θswt вращения руля 20 вычисляется без учета безопасности движения транспортного средства. Тем не менее, в случае, если ширина полосы движения является небольшой или в зависимости от ситуации состояния интенсивного движения в полосе движения, наличия или отсутствия встречного транспортного средства, состояния поверхности дороги, скорости транспортного средства и кривизны полосы движения, имеется риск того, что пассажиры испытывают беспокойство, когда выдается оповещение, которое значительно перемещает или поворачивает транспортное средство.
Следовательно, предпочтительно, величины, на которые изменяются рабочая позиция средства ввода для руления, угол относительно вертикальной оси транспортного средства и поперечная позиция транспортного средства относительно полосы движения, переменно задаются в соответствии с безопасностью движения транспортного средства таким образом, что величины снижаются в случае, если безопасность движения транспортного средства является низкой, по сравнению со случаем, когда безопасность движения транспортного средства является высокой. Безопасность движения транспортного средства может определяться на основе таких индексов, как ширина полосы движения, ситуации состояния интенсивного движения в полосе движения, наличия или отсутствия встречного транспортного средства, состояния поверхности дороги, скорости транспортного средства и кривизны полосы движения.
Следует понимать, что безопасность движения транспортного средства учитывается посредством вычисления целевого угла θswt вращения руля 20 и т.п. с учетом безопасности движения транспортного средства на этапах их вычислений, аналогично случаю, когда транспортное средство поперечно смещается. Согласно этим конфигурациям, в случае, если безопасность движения транспортного средства является низкой, можно не допускать выдачу оповещения, которое значительно перемещает транспортное средство к стороне смещения, чтобы за счет этого снижать риск того, что пассажиры в транспортном средстве испытывают значительное беспокойство.
Дополнительно, в первом-третьем вариантах осуществления, целевой угол θswt вращения руля 20 вычисляется без учета скорости оповещения, которая варьируется в соответствии с абсолютной величиной величины управления для оповещения. В случае, если абсолютная величина величины управления для оповещения является большой, даже если оповещение выдается аккуратно, пассажиры в транспортном средстве могут распознавать оповещение, но в случае, если абсолютная величина величины управления для оповещения является небольшой, если оповещение выдается аккуратно, пассажиры в транспортном средстве не могут распознавать оповещение.
Следовательно, предпочтительно скорости для изменения позиции операции средства ввода для руления и т.п. переменно задаются в соответствии с абсолютными величинами изменений рабочей позиции средства ввода для руления и т.п. таким образом, что скорости являются более высокими в случае, если абсолютные величины изменений являются небольшими, по сравнению со случаем, когда абсолютные величины изменений являются большими.
Следует понимать, что абсолютные величины изменений рабочей позиции средства ввода для руления и т.п. учитываются посредством вычисления целевого угла θswt вращения и т.п. на этапах его вычислений таким образом, что целевые значения становятся целевыми величинами управления максимально быстро, поскольку абсолютные величины изменений рабочей позиции средства ввода для руления и т.п. являются небольшими.
Хотя настоящее изобретение описано в отношении вышеописанных вариантов осуществления, специалистам в данной области техники должно быть очевидным, что настоящее изобретение не ограничено этим, и может быть осуществлено в различных других формах без отступления от объема изобретения.
Например, в вышеописанных первом-третьем вариантах осуществления, средства для оповещения относительно изменения направления движения транспортного средства представляют собой вращение руля 20, изменение угла относительно вертикальной оси транспортного средства и изменение поперечной позиции транспортного средства относительно полосы движения. Тем не менее, в качестве средств оповещения в первом и втором вариантах осуществления могут добавляться изменение поперечной позиции транспортного средства относительно полосы движения и мигание указателя поворота. В качестве средств оповещения в третьем варианте осуществления могут добавляться изменение угла относительно вертикальной оси транспортного средства и мигание указателя поворота, и дополнительно может добавляться снижение скорости транспортного средства.
В вышеописанных первом-третьем вариантах осуществления средства для обеспечения движения транспортного средства вдоль целевой траектории представляют собой модуль 14 варьирования угла поворота при рулении, модуль 22 электрического усилителя рулевого управления и механизм 42 рулевого управления задних колес. Тем не менее, в первом варианте осуществления, поскольку угол относительно вертикальной оси транспортного средства не управляется, механизм рулевого управления задних колес может опускаться, и угол поворота при рулении задних колес может не управляться. Соответственно, первый вариант осуществления может применяться к транспортному средству, которое не оснащается механизмом 42 рулевого управления задних колес, и в этом случае, поскольку вычисление целевого угла θlkart поворота при рулении задних колес в блоке 100 управления траекторией не требуется, этап 160, показанный на фиг. 3, и этапы 380 и 390, показанные на фиг. 5, опускаются.
Третий вариант осуществления также может применяться к транспортному средству, которое не оснащается механизмом 42 рулевого управления задних колес, и оповещение относительно вероятности изменения направления движения транспортного средства может осуществляться посредством вращения руля 20 и т.п.
В вышеописанных первом-третьем вариантах осуществления угол поворота при рулении передних колес управляется таким образом, что он варьируется посредством взаимодействия модуля 14 варьирования угла поворота при рулении и модуля 22 электрического усилителя рулевого управления. Тем не менее, в транспортном средстве, которое не оснащается модулем 14 варьирования угла поворота при рулении, управление углом поворота при рулении передних колес может осуществляться посредством модуля 22 усилителя рулевого управления, чтобы за счет этого заставлять транспортное средство двигаться вдоль целевой траектории и выполнять оповещение относительно вероятности того, что направление движения транспортного средства может быть изменено.
В вышеописанных первом-третьем вариантах осуществления усиливающий крутящий момент при рулении управляется таким образом, что в случае, если не выдается оповещение относительно вероятности того, что направление движения транспортного средства может быть изменено, даже если угол поворота при рулении передних колес управляется для управления траекторией, руль 20 может не вращаться. Тем не менее, устройство управления приведением в движение настоящего изобретения может применяться к транспортному средству, в котором если угол поворота при рулении передних колес управляется для управления траекторией в случае, если не выдается оповещение относительно вероятности того, что направление движения транспортного средства может быть изменено, руль 20 вращается.
В вышеописанном третьем варианте осуществления кривизна Rins предварительной траектории для изменения целевой траектории вычисляется как взвешенная сумма функций кривизны Rpre и Rnew текущей целевой траектории и целевой траектории курса движения, по которому хочет ехать водитель. Тем не менее, предварительные целевые углы поворота при рулении передних и задних колес для изменения целевой траектории могут вычисляться как взвешенная сумма текущих углов поворота при рулении передних и задних колес и целевых углов поворота при рулении передних и задних колес на основе целевой траектории курса движения, по которому хочет ехать водитель.
Помимо этого, в вышеописанном третьем варианте осуществления, оповещение относительно вероятности того, что направление движения транспортного средства может быть изменено, т.е. оповещение относительно наличия ответвления выдается посредством варьирования позиции транспортного средства и т.п. в направлении к ответвляющейся полосе движения на основе текущей целевой траектории. Тем не менее, поскольку намерение водителя может определяться посредством определения реакции водителя на оповещение, варьирование позиции транспортного средства и т.п. может осуществляться напротив ответвляющейся полосы движения.
Реферат
Предложено устройство управления приведением в движение транспортного средства, которое выполняет управление траекторией, при котором управляемые колеса управляются таким образом, чтобы заставлять транспортное средство двигаться вдоль целевой траектории. Когда существует вероятность того, что направление движения транспортного средства может быть изменено за счет управления траекторией, по меньшей мере, одно из рабочей позиции средства ввода для руления, управляемого водителем, угла относительно вертикальной оси транспортного средства и поперечной позиции транспортного средства относительно полосы движения изменяется до того, как будет выполнено изменение направления движения, в силу этого выдавая пассажирам в транспортном средстве предварительное уведомление относительно вероятности изменения направления движения транспортного средства, вызываемого за счет управления траекторией. Достигается выдача предварительного уведомления относительно изменения направления движения транспортного средства. 4 н. и 21 з.п. ф-лы, 36 ил.
Комментарии