Устройство управления автоматическими системами при структурной неопределенности - RU2697728C1
Код документа: RU2697728C1
Чертежи
Описание
Изобретение относится к области цифровых систем управления и может быть использовано для решения задач быстродействия в автоматизированных системах при структурной неопределенности, которая проявляется в изменении математической модели объекта управления в процессе его функционирования. Ключевая гипотеза, позволяющая решить такую задачу, состоит в том, что динамика объекта удовлетворяет вариационному принципу Гамильтона – Остроградского. Это позволяет использовать условия максимума функции обобщенной мощности для построения устройства управления.
Наиболее близким по технической сущности и достигаемому результату является устройство адаптивного регулирования на основе объединённого принципа максимума (см. патент RU № 2646373, опубл. 02.03.2018 г.), содержащее блок хранения констант, блок формирования функции tan, блок линии задержки, два блока разности, два блока формирования модуля, блок суммы, четыре блока формирования произведения и блок отношения.
Недостатком устройства является отсутствие возможности изменения терминального состояния, а также относительно низкое быстродействие, что связано с аппроксимацией релейного режима тригонометрической функцией тангенс.
Техническим результатом является увеличение быстродействия и числа режимов функционирования устройства.
Технический результат достигается за счет того, что устройство управления автоматическими системами при структурной неопределенности содержит блок хранения констант, первый выход которого соединен с первым входом блока формирования разности, выход которого соединен с первым входом второго блока формирования суммы и первым входом второго блока формирования произведения, выход которого соединен с вторым входом второго блока формирования модуля, выход которого соединен с первым входом третьего блока формирования произведения, второй выход блока хранения констант соединен с первым входом первого блока формирования произведения, выход которого соединен с первым входом первого блока формирования суммы, выход которого соединен с вторым входом блока формирования отношения, третий выход блока хранения констант соединен с вторым входом первого блока формирования суммы, четвертый выход блока хранения констант соединен с вторым входом четвертого блока формирования произведения, пятый выход блока хранения констант соединен с вторым входом пятого блока формирования произведения, выход первого блока формирования модуля соединен с вторым входом первого блока формирования произведения, причем вход устройства соединён со вторым входом блока формирования разности, входом первого блока формирования модуля и входом блока формирования производной, выход которого соединен с вторым входом второго блока формирования произведения и вторым входом третьего блока формирования произведения, выход которого соединен с первым входом блока формирования отношения, выход которого соединен с первым входом четвертого блока формирования произведения, выход которого соединен с вторым входом второго блока формирования суммы, выход которого соединен с первым входом пятого блока формирования произведения, выход которого является выходом устройства.
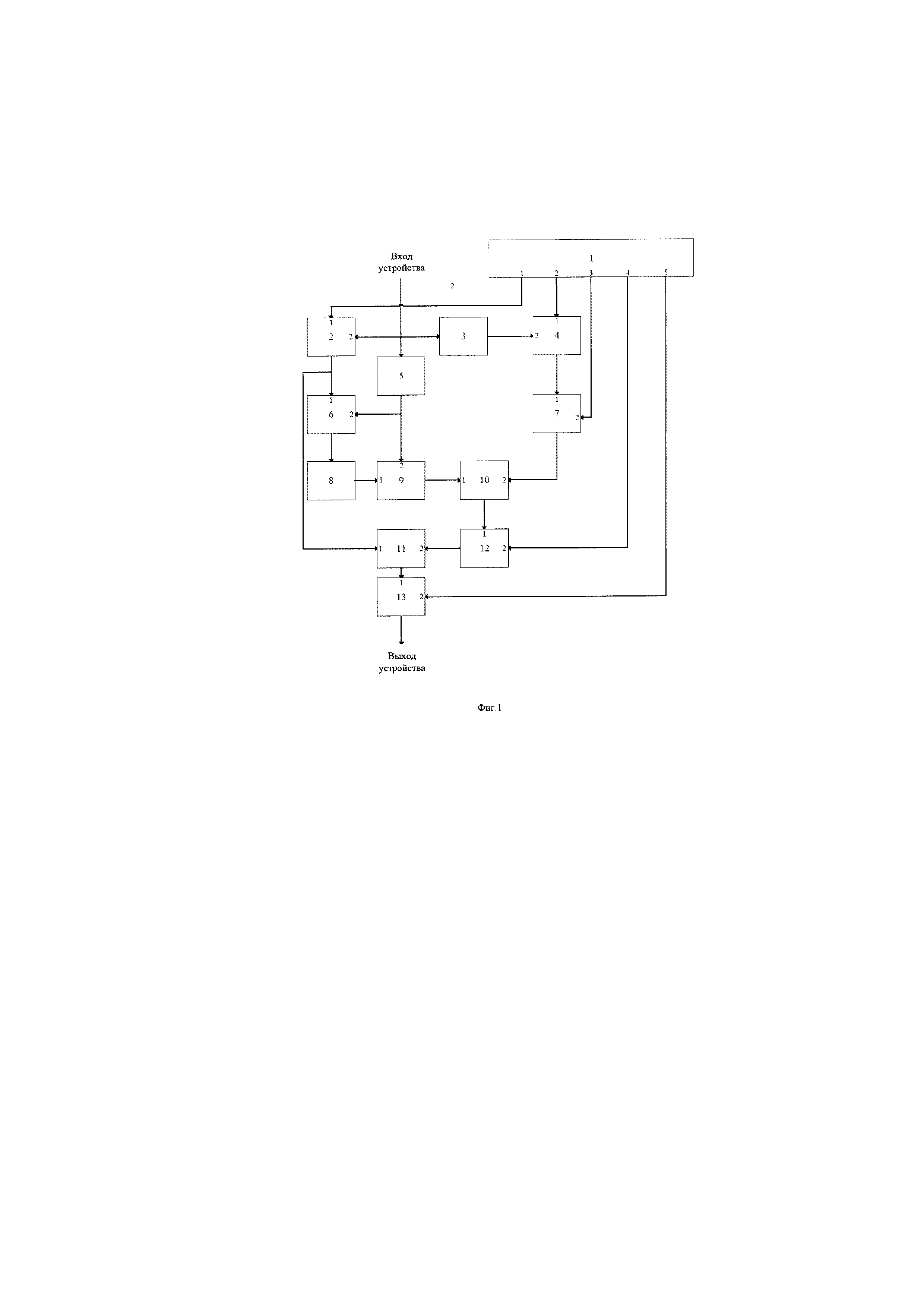
Сущность изобретения поясняется чертежом, где на фиг. 1 представлена блок-схема устройства управления автоматическими системами при структурной неопределенности.
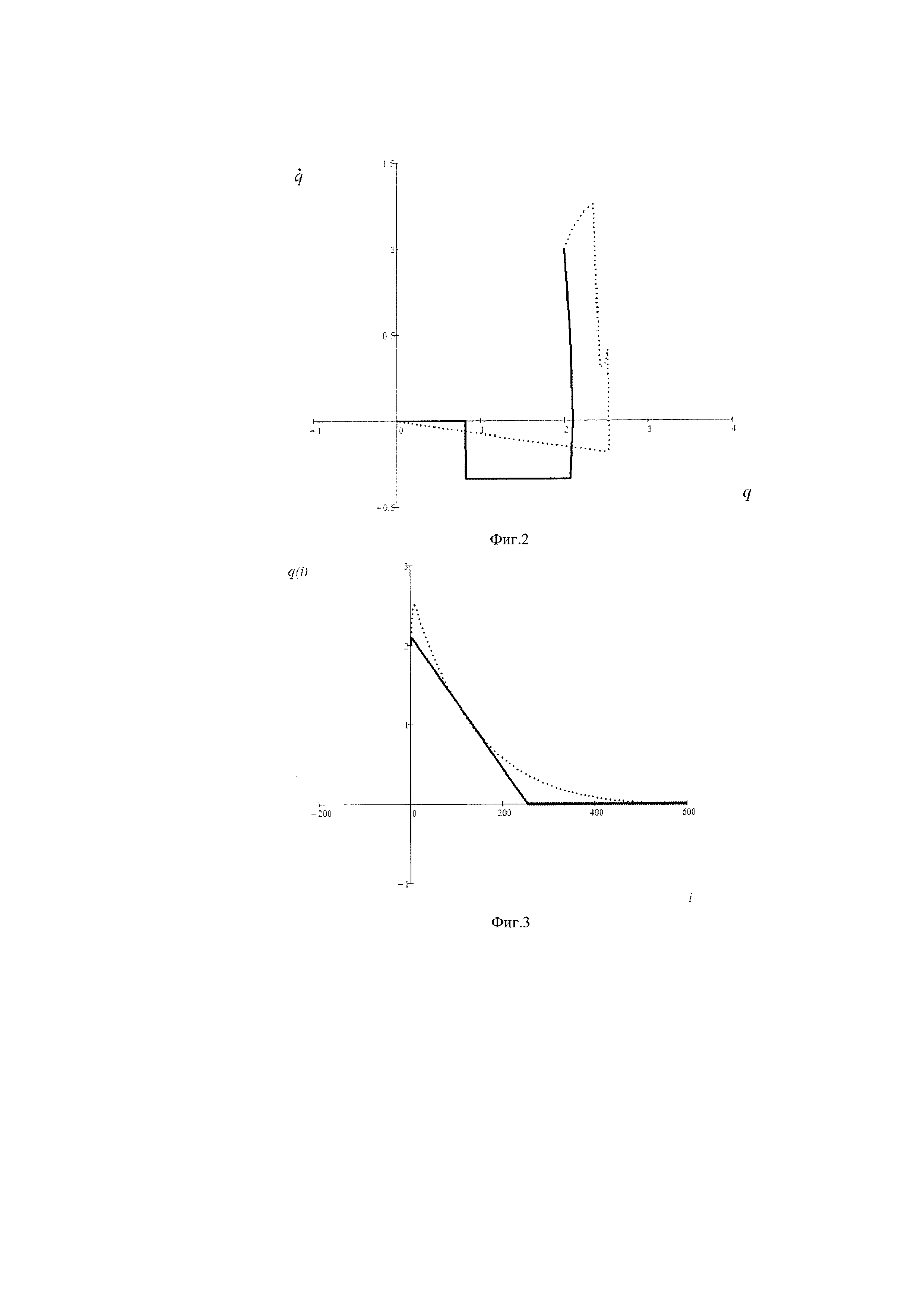
На Фиг.2 представлен фазовый портрет динамической системы второго порядка.
На Фиг.3 представлена динамика состояния объекта управления.
Устройство управления автоматическими системами при структурной неопределенности содержит блок хранения констант 1; блок формирования разности 2; первый и второй блоки формирования модуля 3, 8; пять блоков формирования произведения 4, 6, 9, 12, 13; блок формирования производной 5; первый и второй блоки формирования суммы 7, 11 и блок формирования отношения 10.
Работа устройства поясняется выражением:
(1)
где – текущее состояние, – текущая скорость, С – заданное терминальное состояние, λ–1 – неопределенный множитель Лагранжа, L – константа, зависящая от формы линии переключения, ε – константа, определяющая сдвиг линии переключения.
Устройство работает следующим образом: В момент времени значение подаётся на второй вход блока 2 формирования разности, на вход блока 3 формирования модуля и на вход блока 5 формирования производной, с выхода которого значение поступает на второй вход второго блока 6 формирования произведения и на второй вход третьего блока 9 формирования произведения, с выхода которого значение поступает на первый вход блока 10 формирования отношения, с выхода которого значение поступает на первый вход четвертого блока 12 формирования произведения, с выхода которого значение поступает на второй вход второго блока 11 формирования суммы, с выхода которого значение поступает на первый вход пятого блока 13 формирования произведения, с выход которого значение поступает на выход устройства. С первого выхода блока 1 хранения констант значение поступает на первый вход блока 2 формирования разности, с выхода которого значение поступает на первый вход второго блока 11 формирования разности и первый вход второго блока 6 формирования произведения, с выхода которого значение поступает на вход второго блока 8 формирования модуля, с выхода которого значение поступает на первый вход третьего блока 9 формирования произведения, а со второго выхода блока 1 хранения констант значение L поступает на первый вход первого блока 4 формирования произведения, c выхода которого значение поступает на первый вход первого блока 7 формирования суммы, c выхода которого значение поступает на второй вход блока 10 формирования отношений, с третьего выхода блока 1 хранения констант значение поступает на второй вход первого блока 7 формирования суммы, с четвертого выхода блока 1 хранения констант значение -1 поступает на второй вход четвертого блока 12 формирования произведения, с пятого выхода блока 1 хранения констант значение поступает на второй вход пятого блока 13 формирования произведения, с выхода первого блока 3 формирования модуля значение поступает на второй вход первого блока 4 формирования произведения.
Пример. Рассмотрим динамическую систему второго порядка
(2)
и необходимо поставить задачу синтеза управления, обеспечивающего минимум функционала
. (3)
Оценка эффективности (1) произведена на основе сравнения с прототипом, функционирование которого задано выражением [1,2]:
(4)
Результаты математического моделирования приведены на фигурах 2, 3. Их анализ показывает, что в отличие от прототипа предлагаемое устройство обеспечивает большее быстродействие, а также позволяет выбрать терминальное состояние с нулевой скоростью. Непосредственное использование (4) не позволяет решить задачу (2), (3).
Результаты, приведенные в примере, позволяют сделать заключение о достижении заявленного технического результата.
Литература
1. Костоглотов А.А., Лазаренко С.В. Синтез адаптивных систем сопровождения на основе гипотезы о стационарности гамильтониана гиперповерхности переключения // Радиотехника и электроника. 2017. Т. 62. № 2. С. 121-125.
2. Костоглотов А.А., Лященко З.В., Лазаренко С.В., Дерябкин И.В., Манаенкова О.Н. Синтез адаптивных многорежимных регуляторов на основе комбинированного управления объединенного принципа максимума // Вестник Ростовского государственного университета путей сообщения. 2016. № 3. С. 124-132.
Реферат
Изобретение относится к области цифровых систем управления и может быть использовано для решения задач быстродействия в автоматизированных системах, например в радиотехнике в системах фазовой автоподстройки частоты. Техническим результатом является увеличение быстродействия и числа режимов функционирования автоматизированных систем. Устройство содержит блок хранения констант, блок формирования разности, два блока формирования модуля, пять блоков формирования произведения, блок формирования производной, два блока формирования суммы и блок формирования отношения. 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство адаптивного регулирования на основе объединённого принципа максимума
Устройство терминального управления на основе вариационных принципов
Комментарии