Хирургический сшивающий инструмент с управлением двигателем на основании показаний температуры - RU2714880C2
Код документа: RU2714880C2
Чертежи

















Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение, описанное в настоящем документе, относится к хирургическим инструментам и в различных вариантах осуществления к хирургическим сшивающим и режущим инструментам и предназначенным для применения с ними кассетам со скобами.
Сшивающий инструмент может включать в себя две взаимодействующие удлиненные бранши, каждая из которых выполнена с возможностью введения в тело пациента и расположения относительно сшиваемой и/или разрезаемой ткани. В различных вариантах осуществления одна из браншей может поддерживать кассету со скобами с, по меньшей мере, двумя содержащимися в ней рядами скоб, расположенными в боковом направлении, и вторая бранша может поддерживать упор с формирующими скобу углублениями, совмещенными с рядами скоб в кассете со скобами. По существу, сшивающий инструмент может дополнительно включать в себя стержень-толкатель и лезвие скальпеля, которые выполнены с возможностью перемещения относительно браншей для последовательного выталкивания скоб из кассеты со скобами посредством кулачковых поверхностей на стержне-толкателе и/или кулачковых поверхностей на клиновидных салазках, которые проталкиваются стержнем-толкателем. По меньшей мере, в одном варианте осуществления кулачковые поверхности выполнены с возможностью приведения в движение множества выталкивателей скоб, находящихся в кассете и связанных со скобами, чтобы проталкивать скобы к упору и формировать расположенные в боковом направлении ряды деформированных скоб в ткани, зажатой между браншами. По меньшей мере, в одном варианте осуществления лезвие скальпеля может следовать по кулачковым поверхностям и разрезать ткань вдоль линии между рядами скоб.
Изложенное выше описание предназначено лишь для иллюстрации различных аспектов соответствующей технологии в области применения изобретения в настоящее время, и его не следует рассматривать как ограничение объема формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Различные элементы вариантов осуществления, описанные в настоящем документе, наряду с их преимуществами, могут быть понятны после изучения представленного ниже описания вместе с сопроводительными чертежами, причем:
на ФИГ. 1 представлен вид в перспективе хирургического инструмента, который имеет сменный узел стержня, функционально с ним соединенный;
на ФИГ. 2 представлен вид в сборе с пространственным разделением компонентов сменного узла стержня и хирургического инструмента, изображенных на ФИГ. 1;
на ФИГ. 3 представлен другой вид в сборе с пространственным разделением компонентов сменного узла стержня и хирургического инструмента, изображенных на ФИГ. 1 и 2;
на ФИГ. 4 представлен вид в сборе с пространственным разделением компонентов части хирургического инструмента, показанного на ФИГ. 1-3;
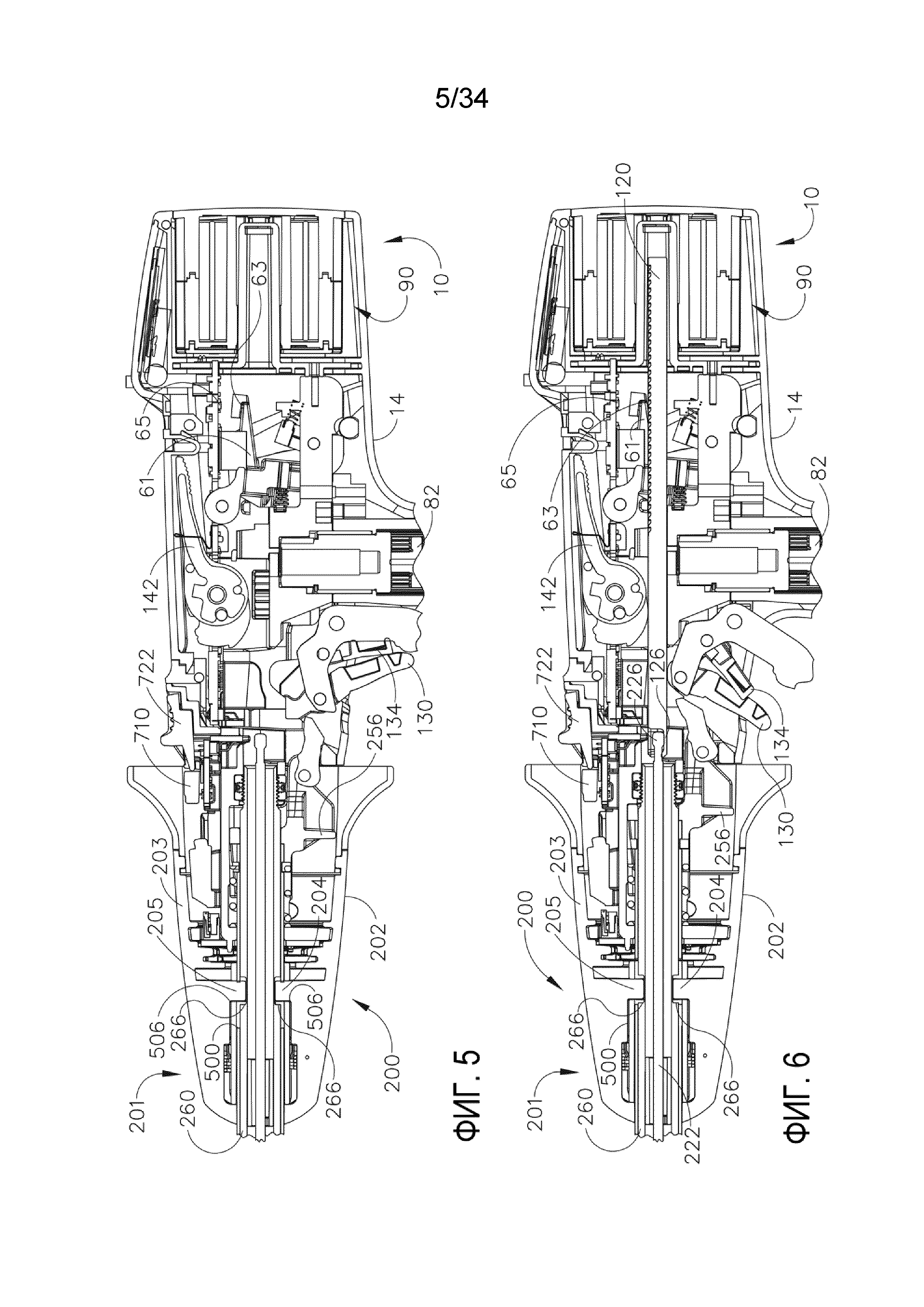
На ФИГ. 5 представлен вид сбоку в поперечном разрезе участка хирургического инструмента, изображенного на ФИГ. 4, с пусковым крючком в полностью активированном положении;
На ФИГ. 6 представлен другой вид в поперечном разрезе участка хирургического инструмента, изображенного на ФИГ. 5, с пусковым крючком в неактивированном положении;
на ФИГ. 7 представлен вид в сборе с пространственным разделением одной формы сменного узла стержня;
на ФИГ. 8 представлен другой вид в сборе с пространственным разделением частей сменного узла стержня, показанного на ФИГ. 7;
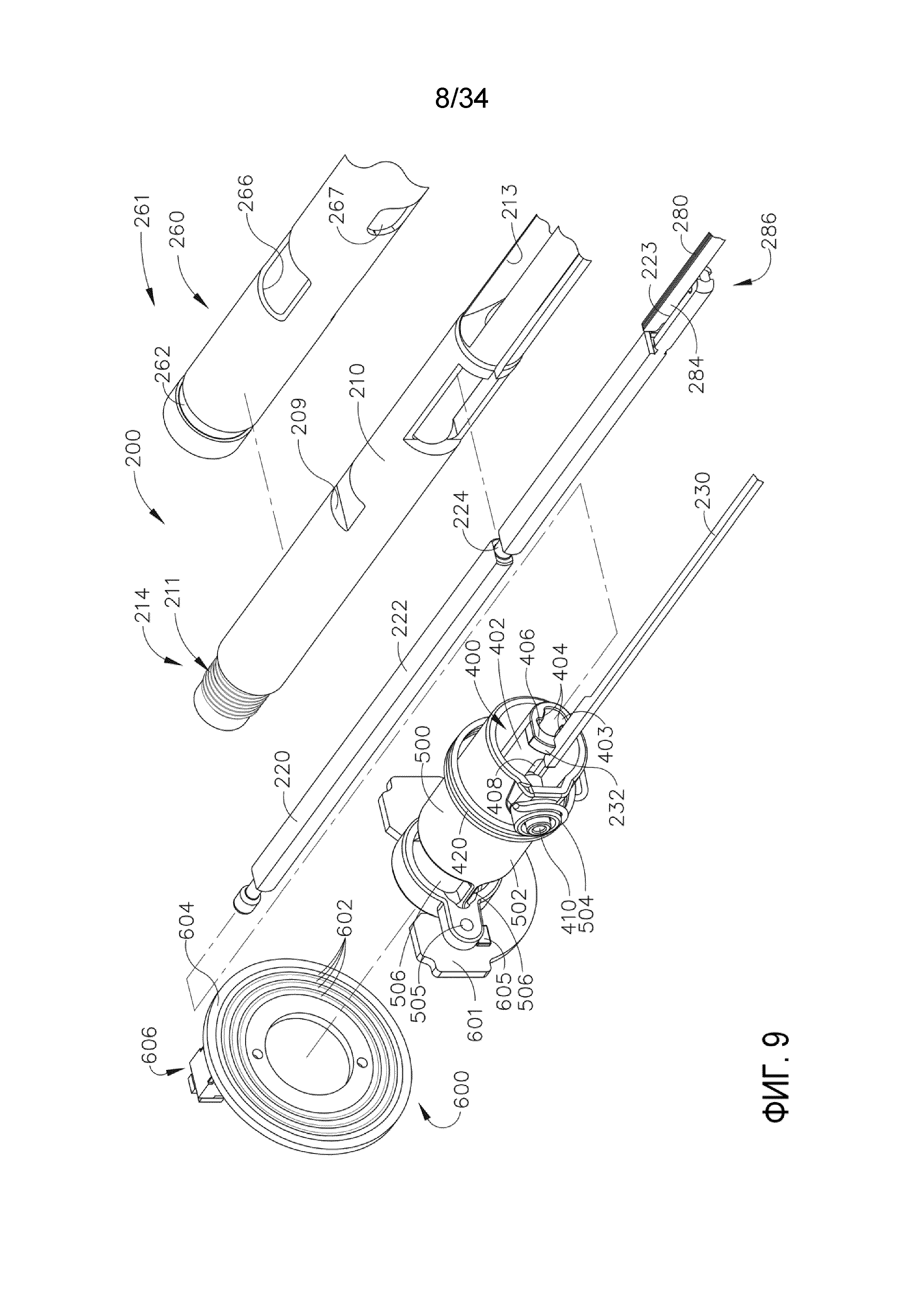
на ФИГ. 9 представлен другой вид в сборе с пространственным разделением частей сменного узла стержня, показанного на ФИГ. 7 и 8;
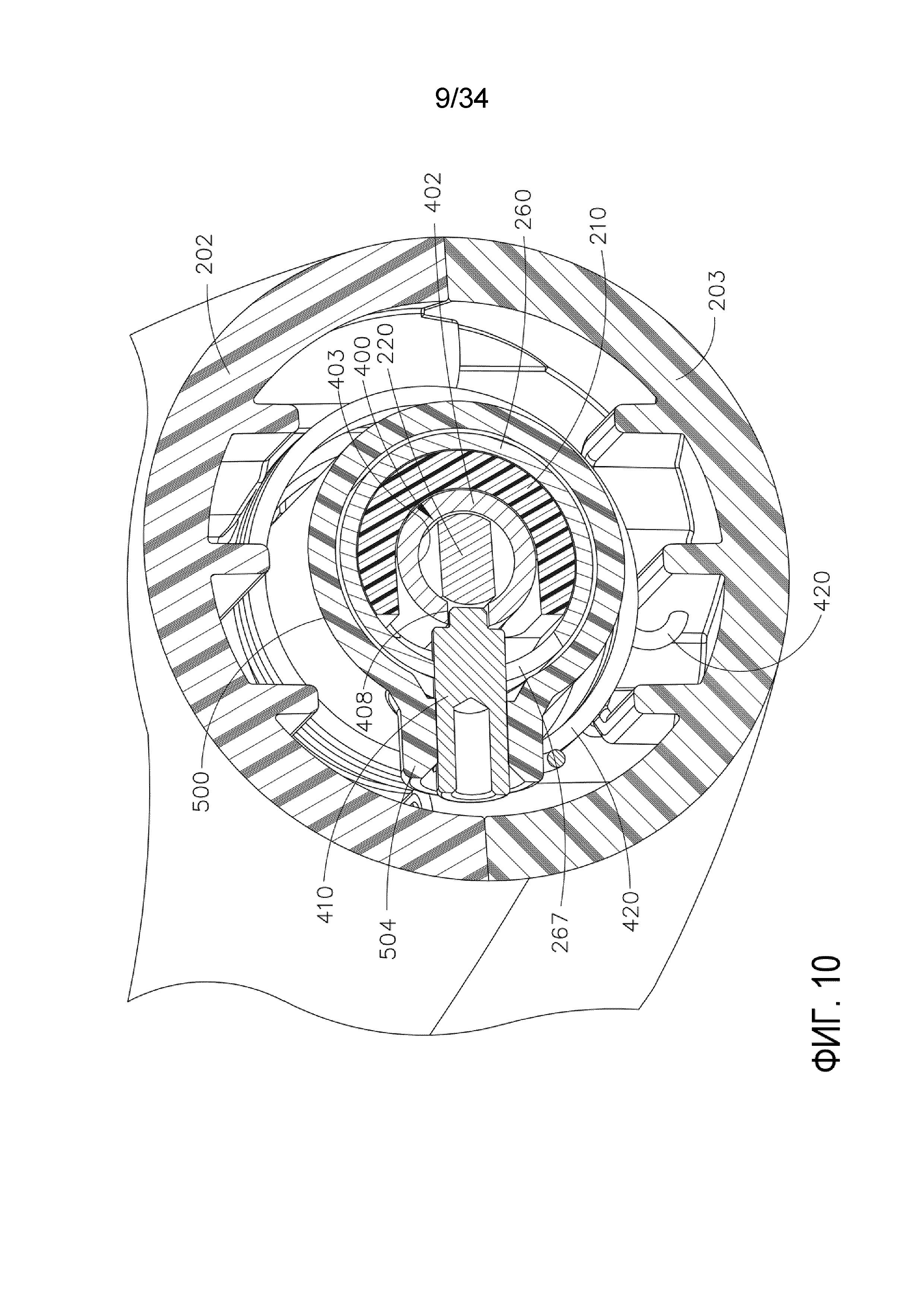
на ФИГ. 10 представлен вид в поперечном сечении части сменного узла стержня, показанного на ФИГ. 7-9;
на ФИГ. 11 представлен вид в перспективе части узла стержня, показанного на ФИГ. 7-10, с барабаном переключателя, исключенным для ясности;
на ФИГ. 12 представлен другой вид в перспективе части сменного узла стержня, показанного на ФИГ. 11, с барабаном переключателя, установленным на нем;
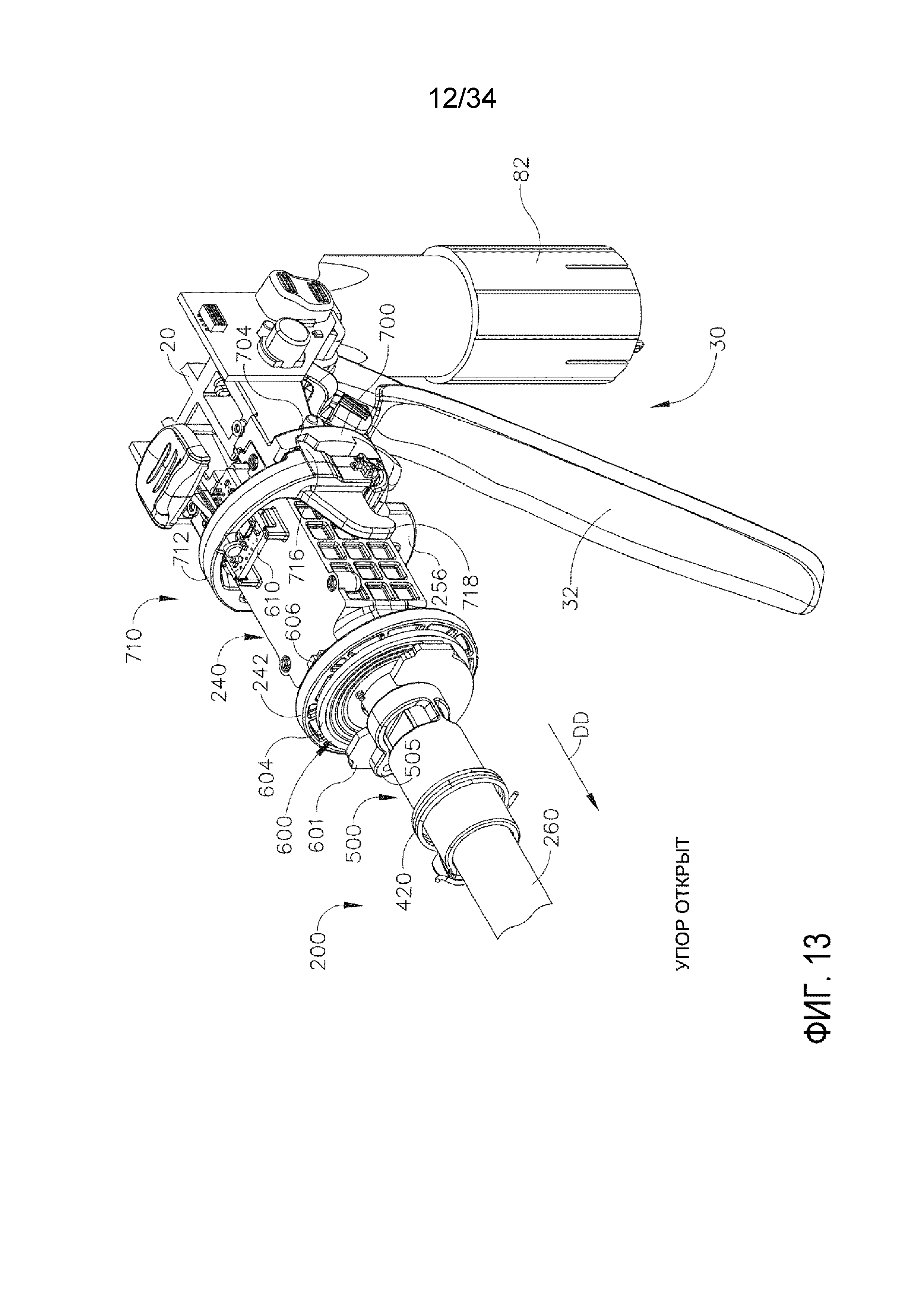
на ФИГ. 13 представлен вид в перспективе части сменного узла стержня, показанного на ФИГ. 11, функционально соединенной с частью хирургического инструмента, показанного на ФИГ. 1, с его закрывающим спусковым механизмом в неактивированном положении;
на ФИГ. 14 представлен вид справа в вертикальной проекции сменного узла стержня и хирургического инструмента, изображенных на ФИГ. 13;
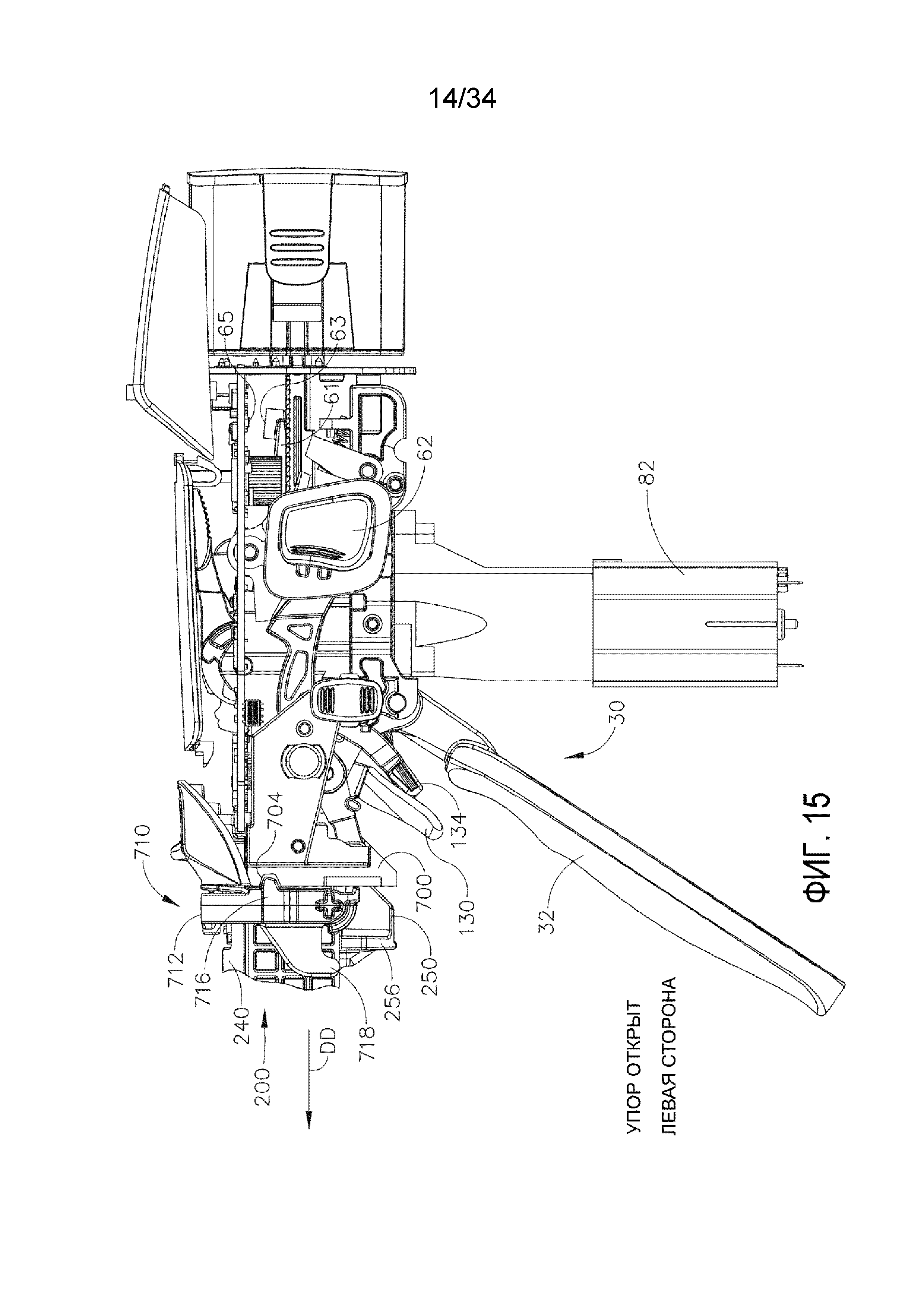
на ФИГ. 15 представлен вид слева в вертикальной проекции сменного узла стержня и хирургического инструмента, изображенных на ФИГ. 13 и 14;
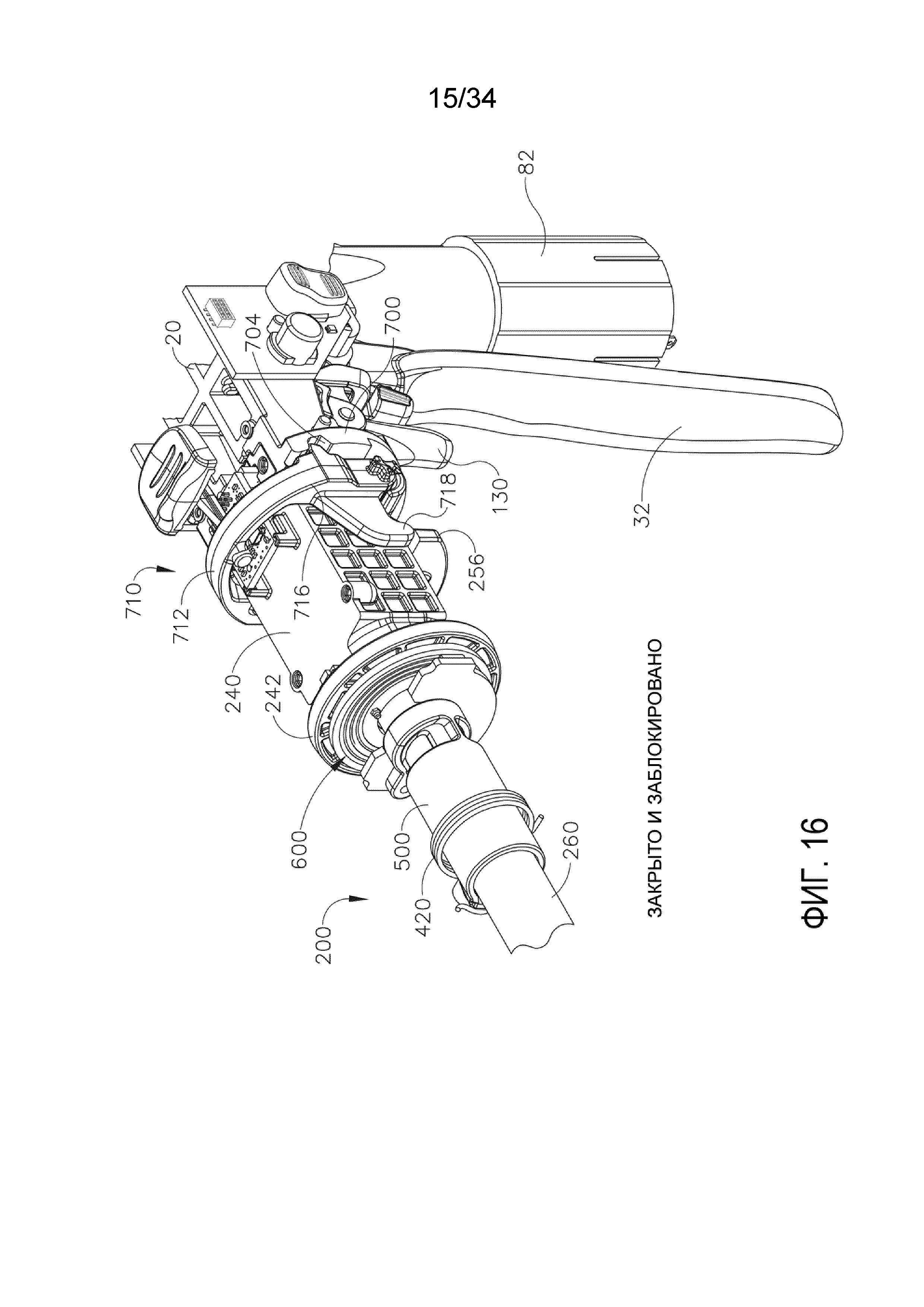
на ФИГ. 16 представлен вид в перспективе части сменного узла стержня, показанного на ФИГ. 11, функционально соединенной с частью хирургического инструмента, показанного на ФИГ. 1, с его закрывающим спусковым механизмом в активированном положении и пусковым крючком в неактивированном положении;
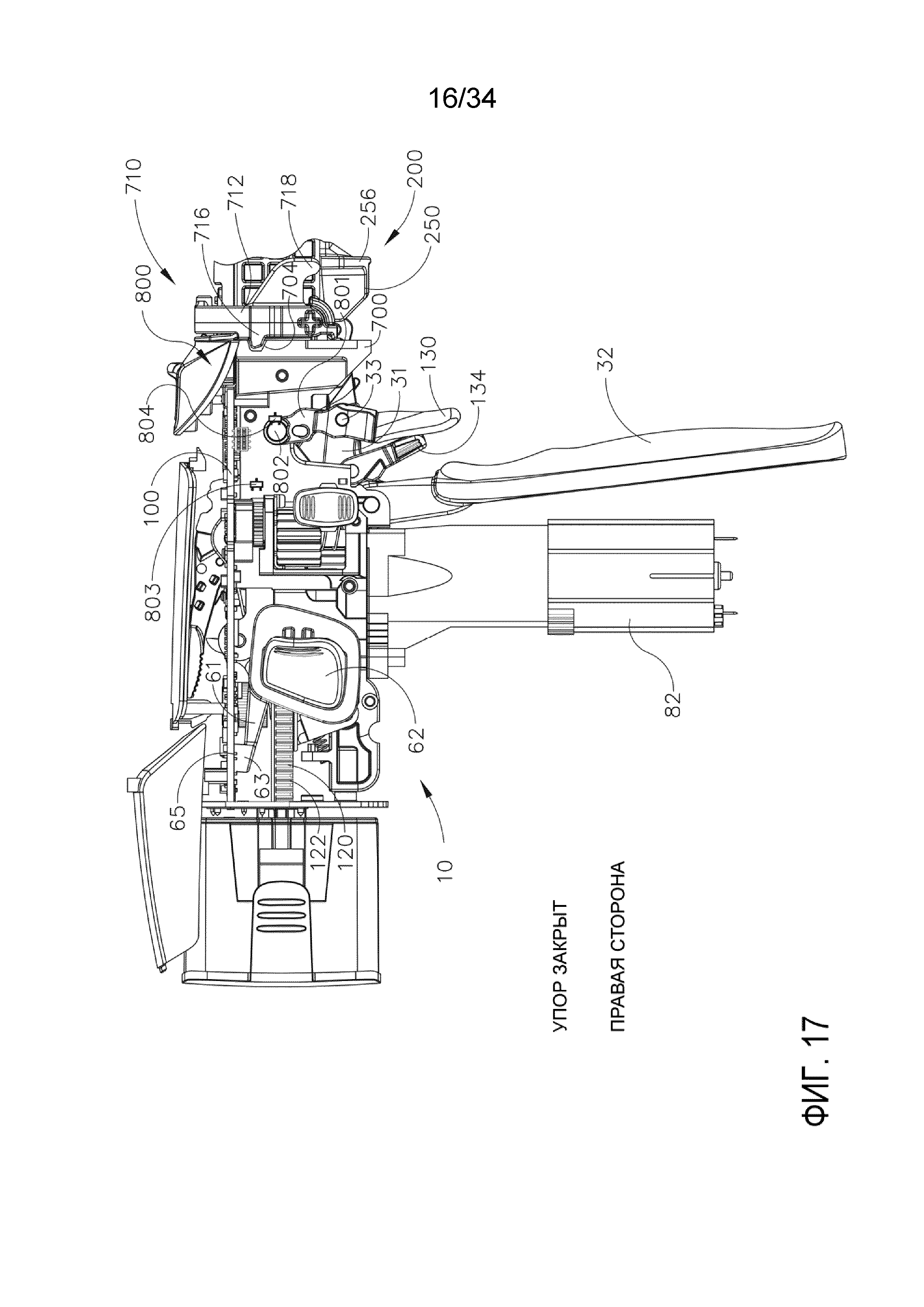
на ФИГ. 17 представлен вид справа в вертикальной проекции сменного узла стержня и хирургического инструмента, изображенных на ФИГ. 16;
на ФИГ. 18 представлен вид слева в вертикальной проекции сменного узла стержня и хирургического инструмента, изображенных на ФИГ. 16 и 17;
на ФИГ. 18A представлен вид справа в вертикальной проекции сменного узла стержня, показанного на ФИГ. 11, функционально соединенного с частью хирургического инструмента, показанного на ФИГ. 1, с его закрывающим спусковым механизмом в активированном положении и пусковым крючком в неактивированном положении;
на ФИГ. 19 представлена схема системы отключения питания на электрическом разъеме рукоятки хирургического инструмента, когда узел стержня с ней не соединен;
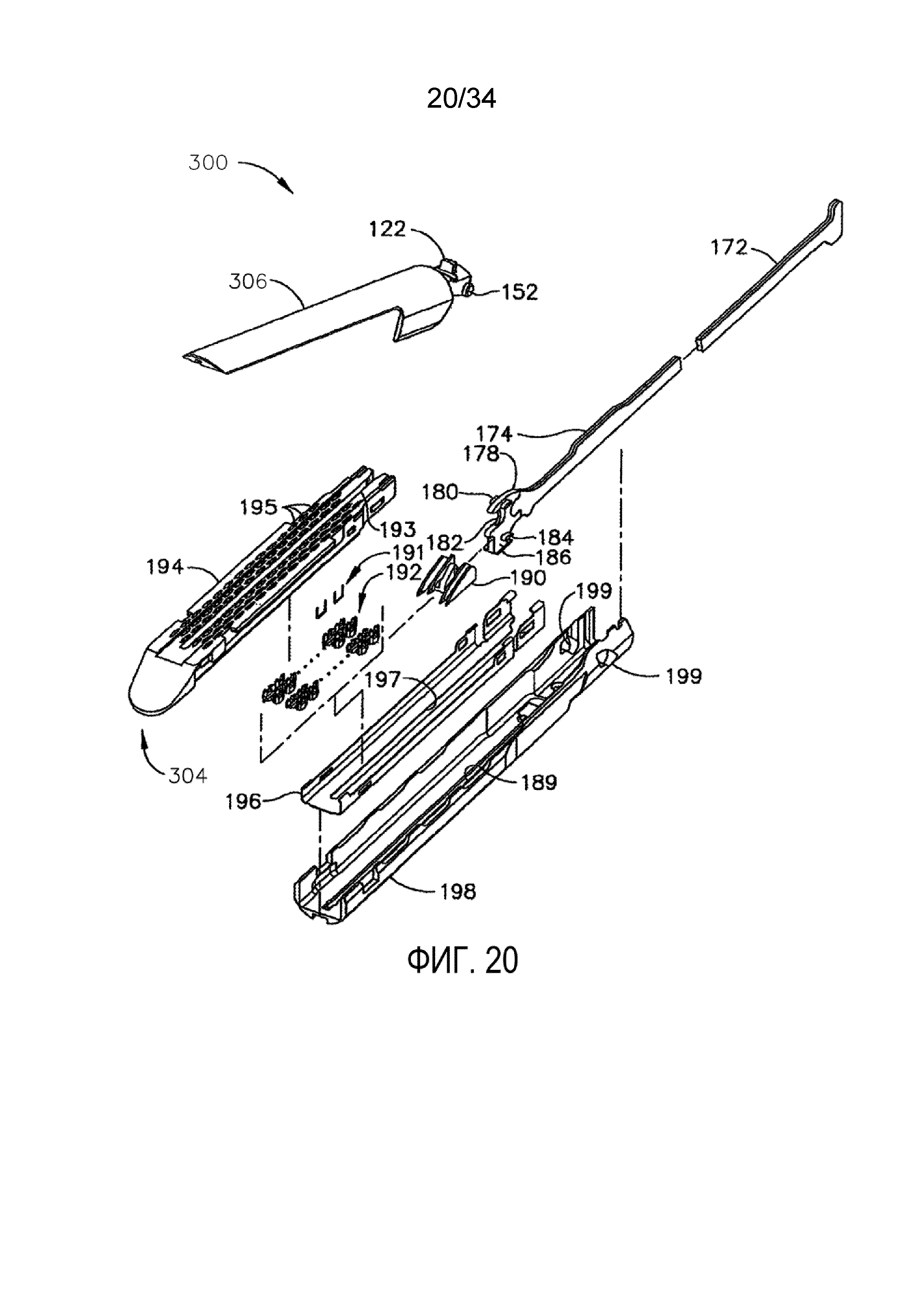
на ФИГ. 20 представлен вид с пространственным разделением одного компонента концевого эффектора хирургического инструмента, изображенного на ФИГ. 1;
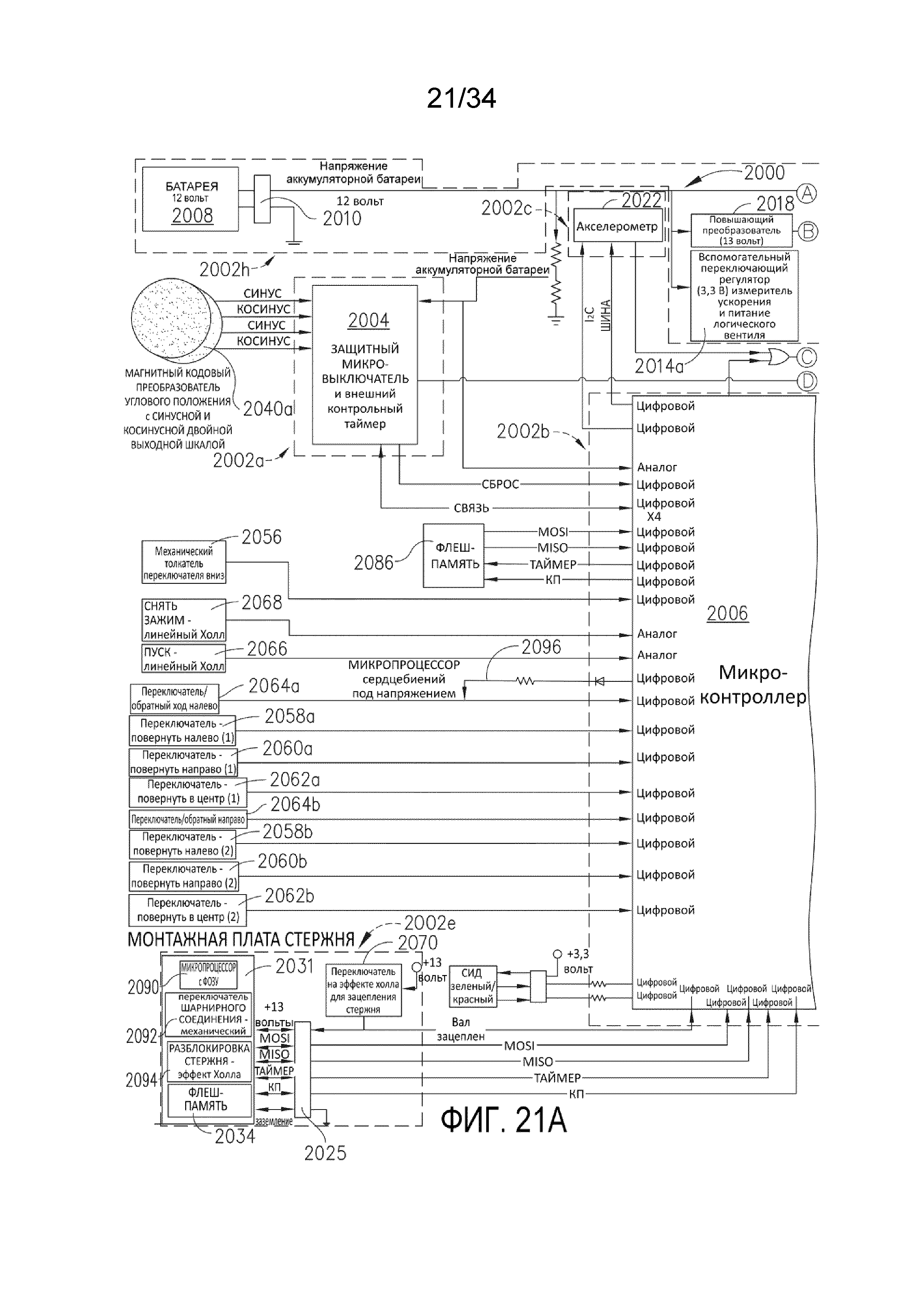
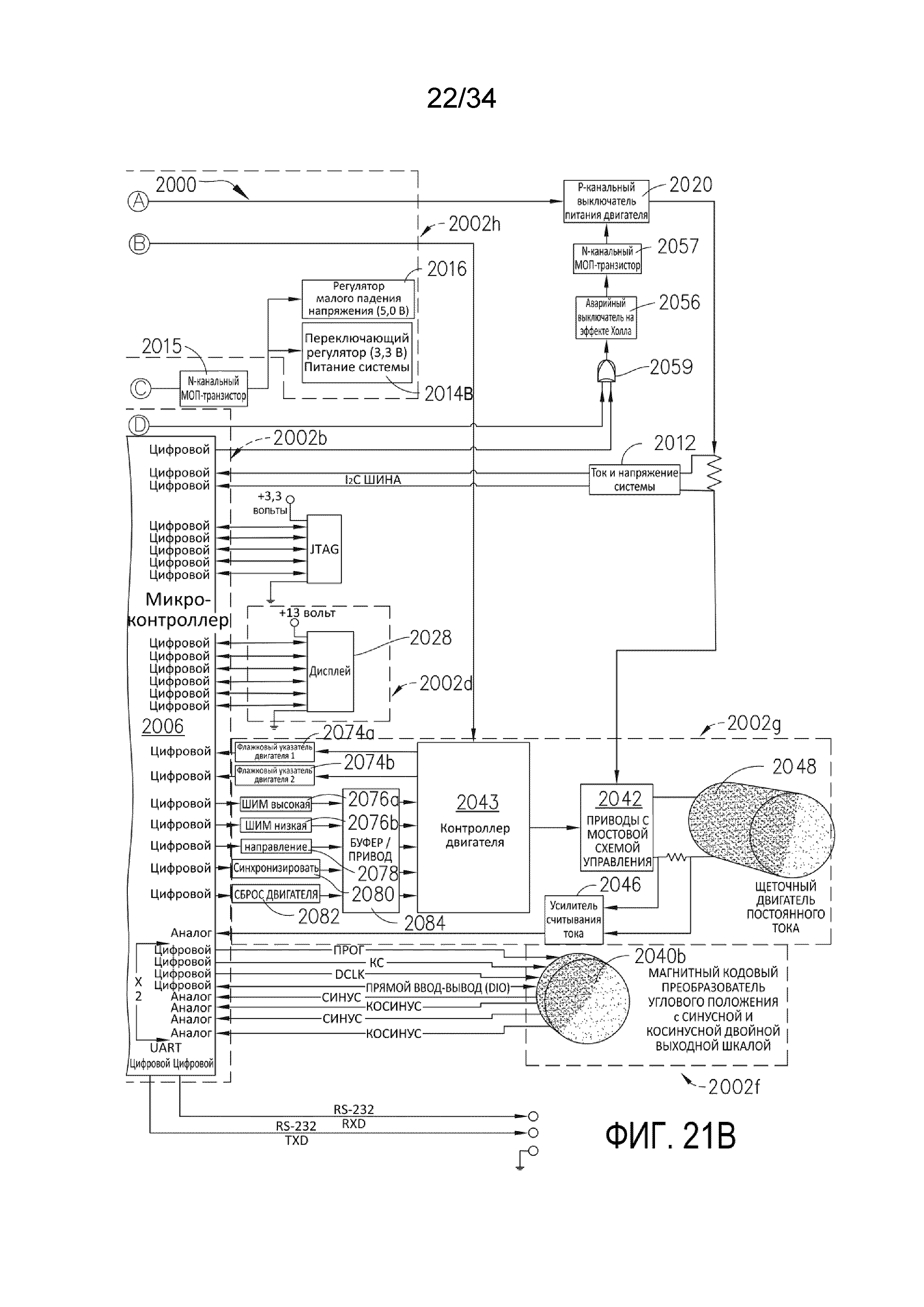
на ФИГ. 21A-21B представлена принципиальная схема цепи хирургического инструмента, показанного на ФИГ. 1, занимающая два листа графических материалов;
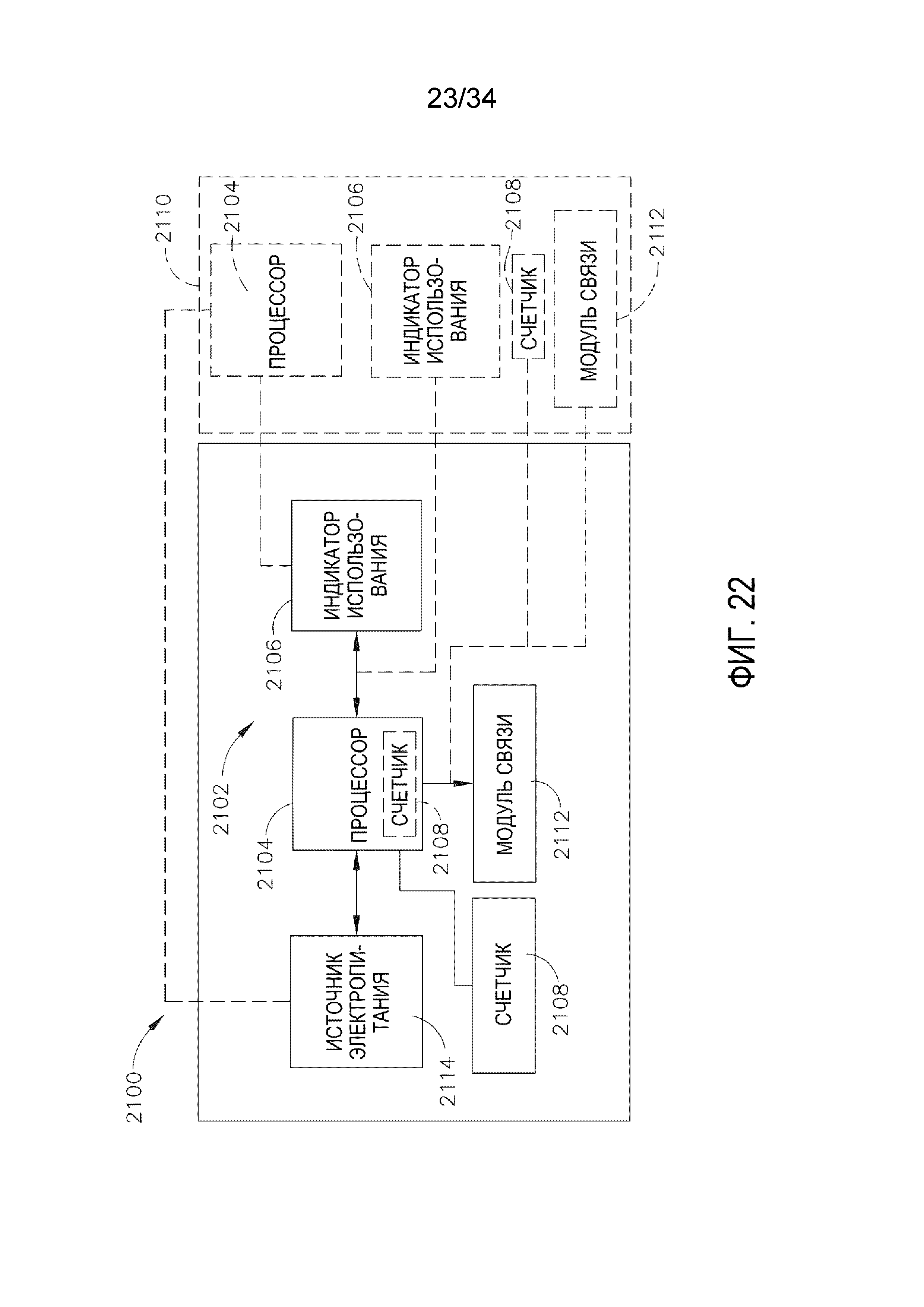
на ФИГ. 22 изображен один вариант узла питания, содержащего цепь цикла использования, выполненную с возможностью подсчета количества циклов использования батарейного блока;
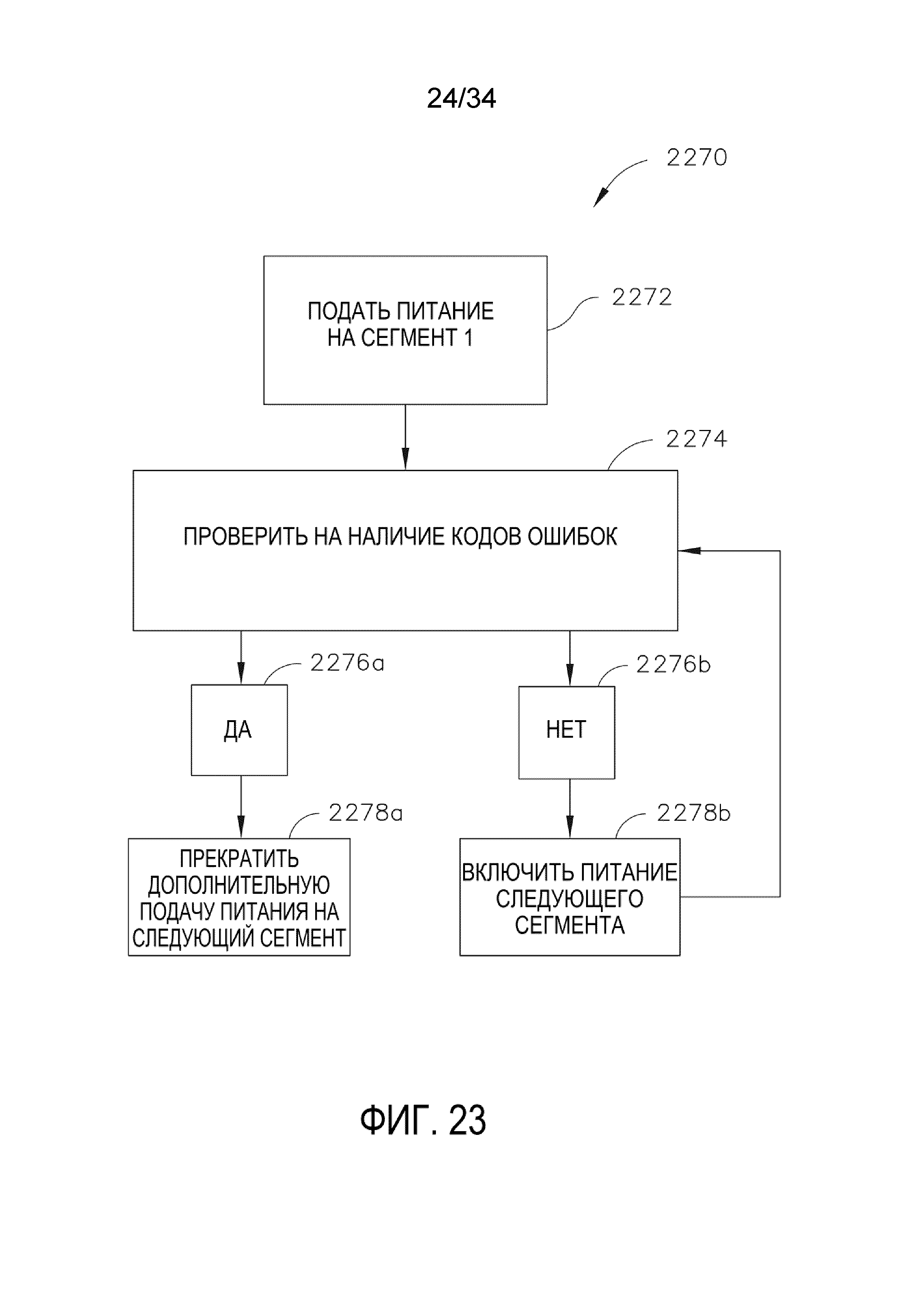
на ФИГ. 23 изображен один аспект процесса для последовательной подачи питания на сегментированную цепь;
на ФИГ. 24 изображен один аспект сегмента питания, содержащего множество последовательно подключенных преобразователей мощности;
на ФИГ. 25 изображен один аспект сегментированной цепи, выполненной с возможностью максимального увеличения подачи питания для критических и/или энергоемких функций;
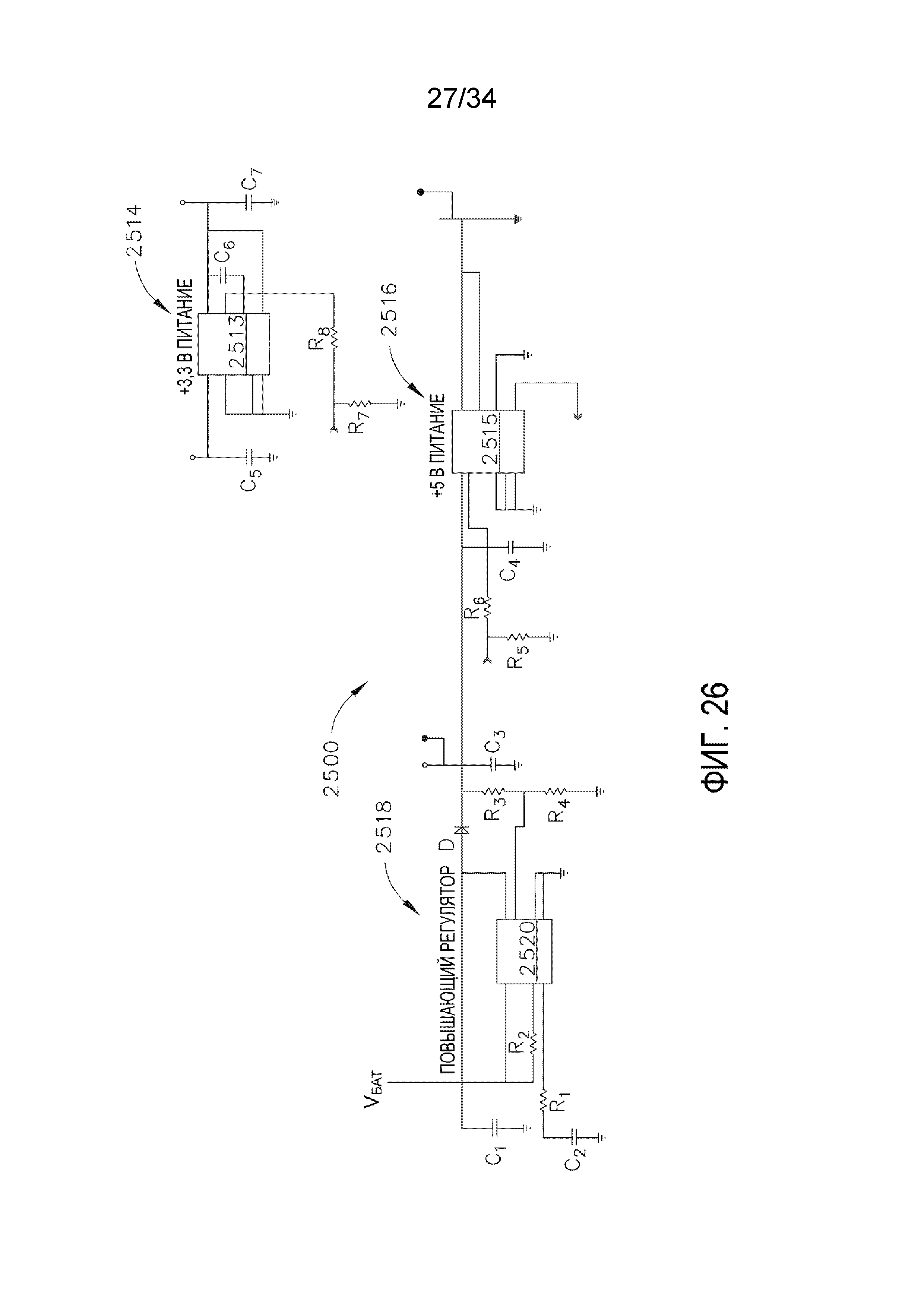
на ФИГ. 26 изображен один аспект системы питания, содержащей множество последовательно подключенных преобразователей мощностей, выполненных с возможностью последовательного питания;
на ФИГ. 27 изображен один аспект сегментированной цепи, содержащей изолированный участок управления;
на ФИГ. 28, которая разделена на ФИГ. 28A и 28B, представлена принципиальная схема цепи хирургического инструмента, показанного на ФИГ. 1;
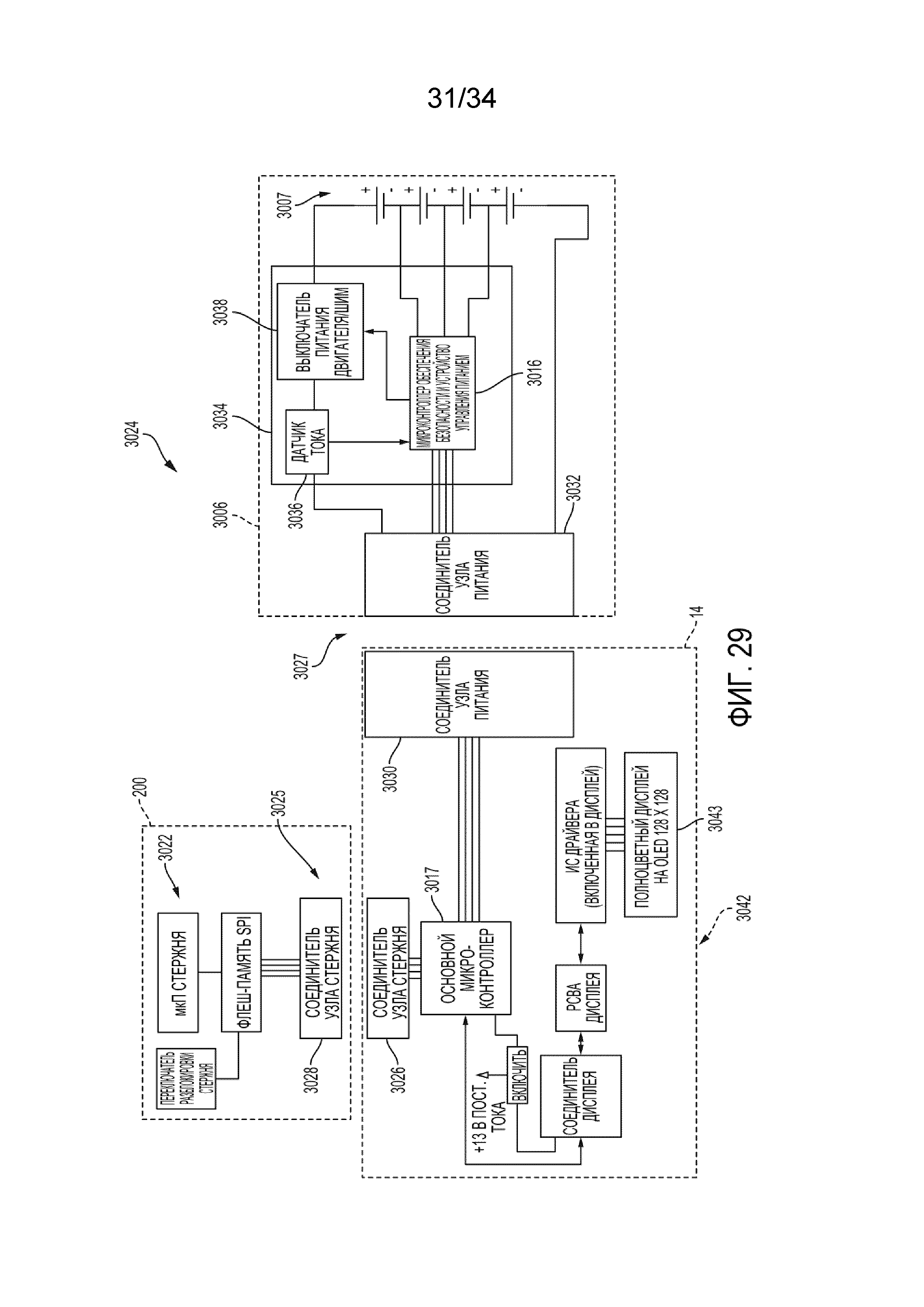
на ФИГ. 29 представлена блок-схема хирургического инструмента, показанного на ФИГ. 1, на которой изображены интерфейсы между узлом 14 рукоятки и узлом питания, а также между узлом 14 рукоятки и сменным узлом стержня;
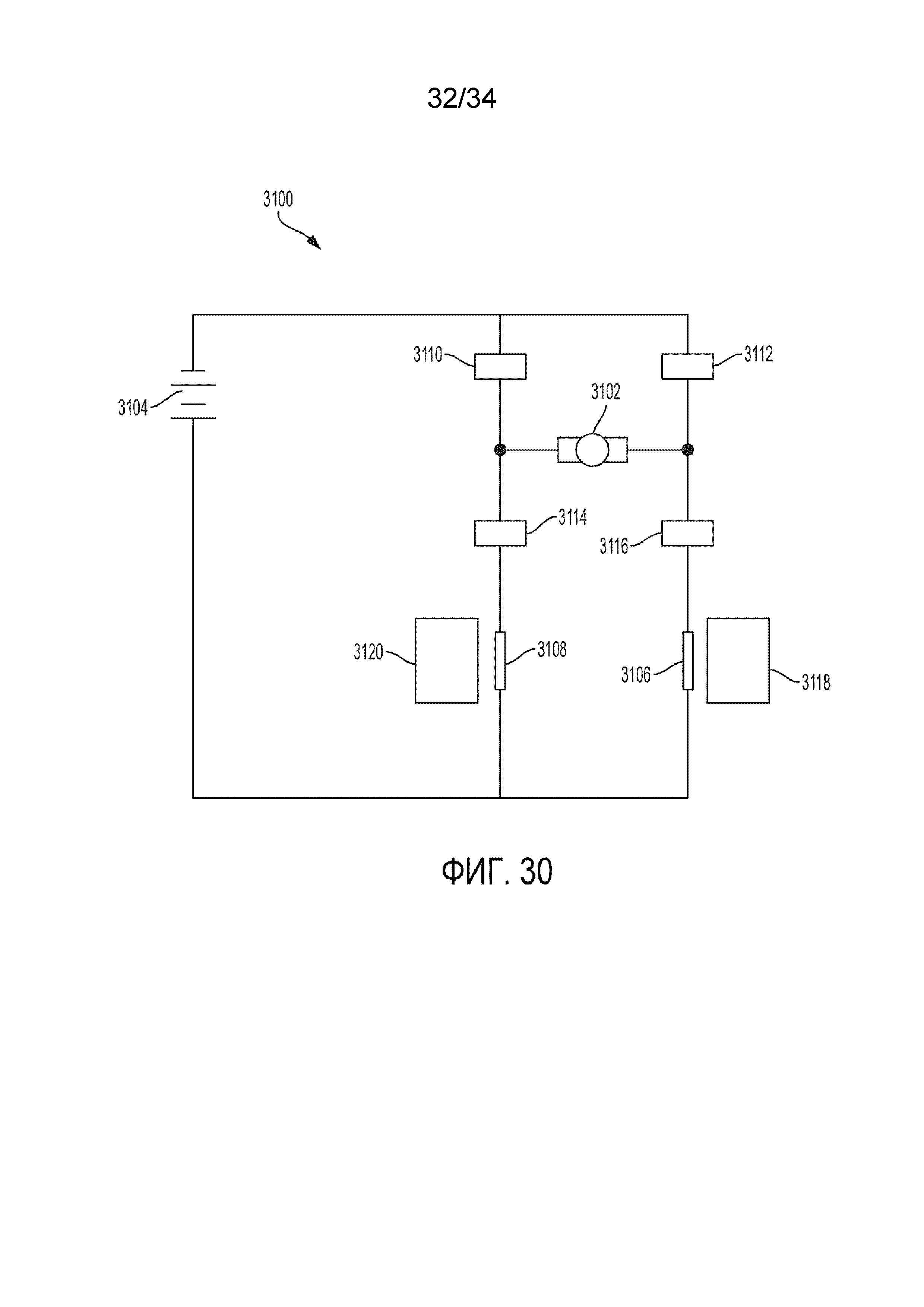
на ФИГ. 30 представлено упрощенное изображение различных вариантов осуществления хирургического сшивающего инструмента;
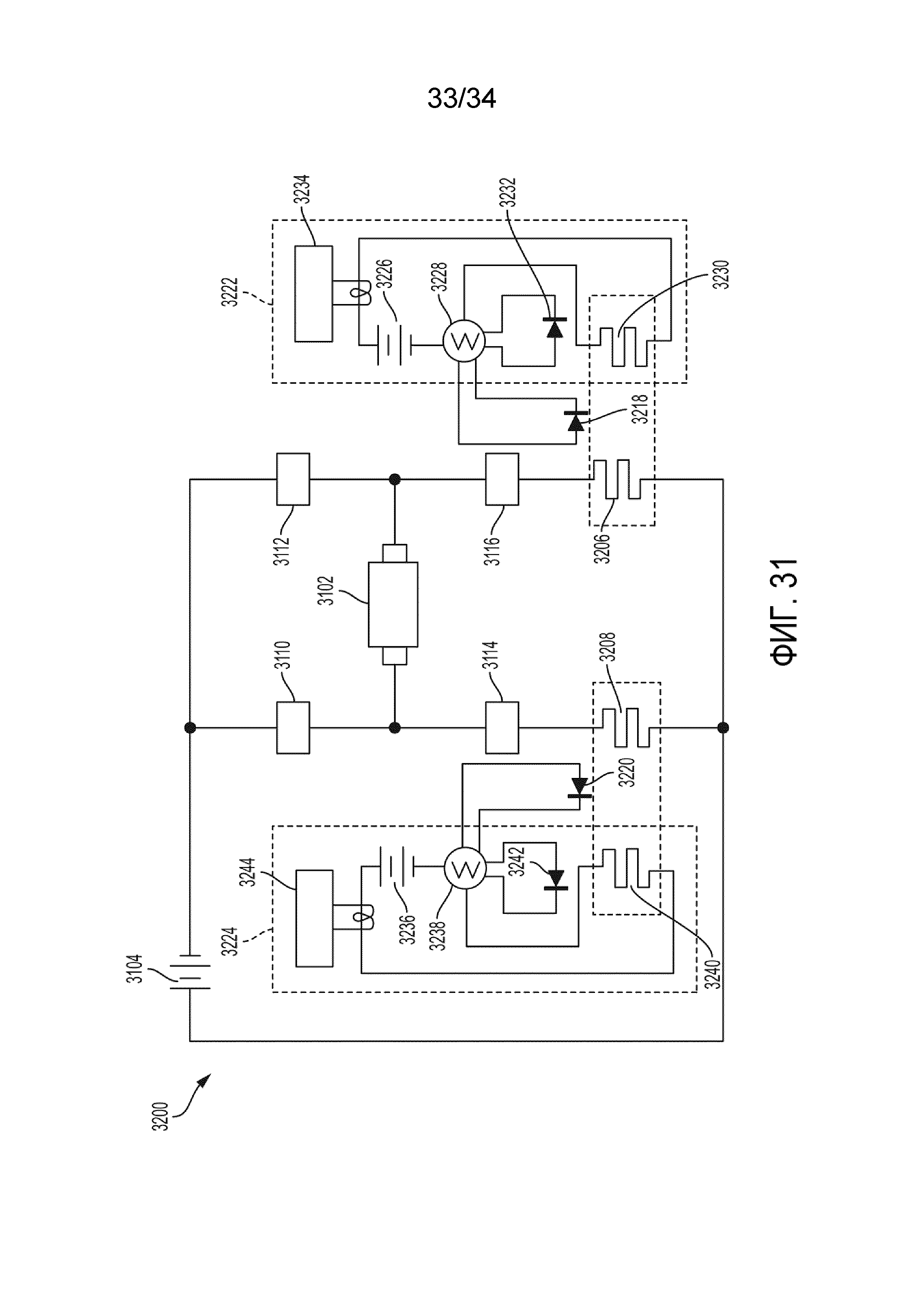
на ФИГ. 31 представлен упрощенный вид различных вариантов осуществления хирургического сшивающего инструмента. и
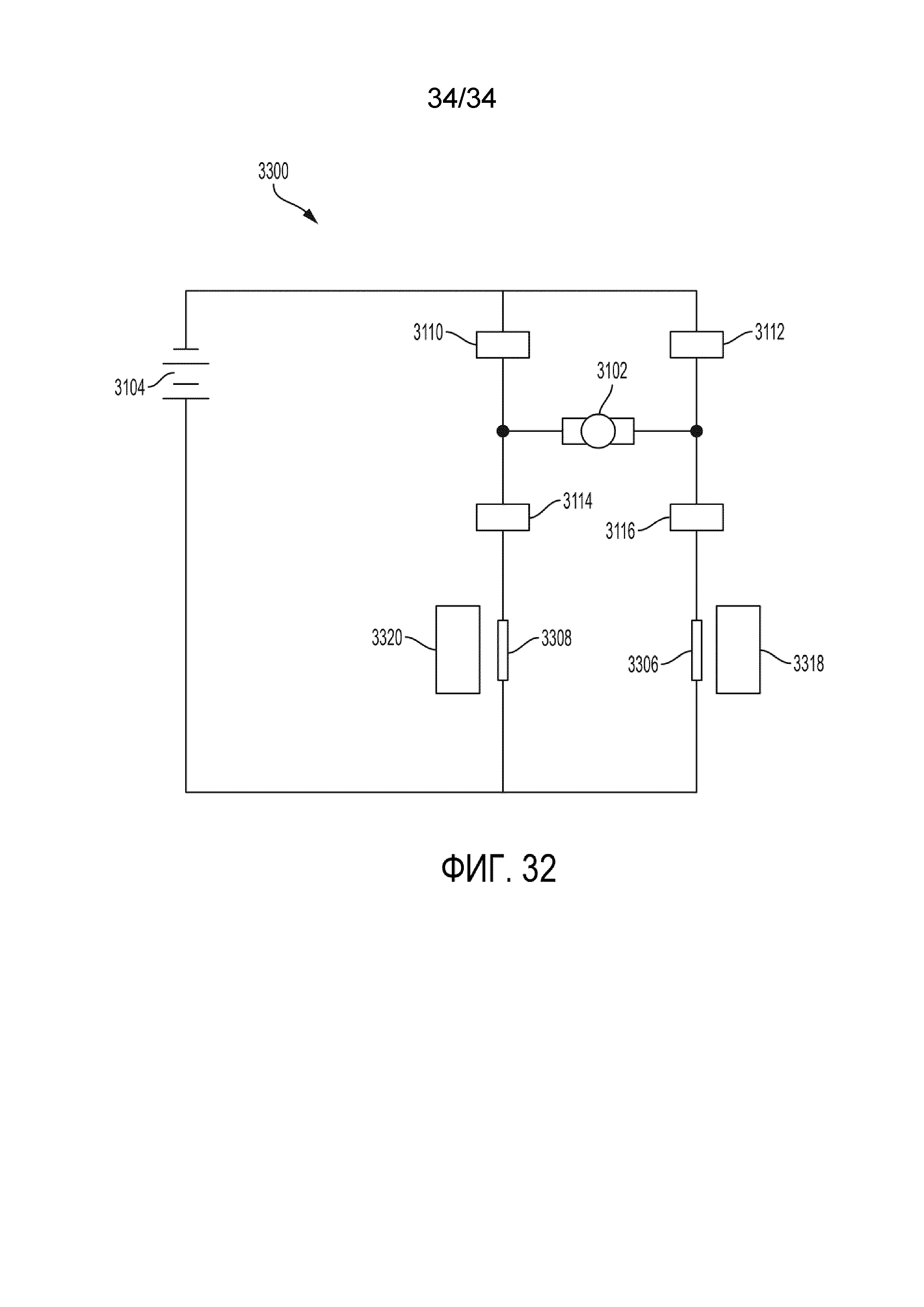
на ФИГ. 32 представлено упрощенное изображение различных вариантов осуществления хирургического сшивающего инструмента;
Соответствующие элементы на разных видах обозначаются соответствующими условными обозначениями. Иллюстративные примеры, представленные в данном документе, демонстрируют различные варианты осуществления настоящего изобретения в одной из его форм. Эти иллюстративные примеры не должны истолковываться как ограничивающие объем изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные в тот же день, причем каждая из них полностью включена в настоящий документ путем ссылки:
заявка на патент США № __________, озаглавленная SURGICAL STAPLER HAVING DOWNSTREAM CURRENT-BASED MOTOR CONTROL; досье патентного поверенного № END7660USNP/150095;
заявка на патент США № __________, озаглавленная SURGICAL STAPLER HAVING MOTOR CONTROL BASED ON A DRIVE SYSTEM COMPONENT; досье патентного поверенного № END7661USNP/150096;
заявка на патент США № __________, озаглавленная SURGICAL STAPLER HAVING MAGNETIC FIELD-BASED MOTOR CONTROL; досье патентного поверенного № END7663USNP/150098;
заявка на патент США № __________, озаглавленная SURGICAL STAPLER HAVING FORCE-BASED MOTOR CONTROL; досье патентного поверенного № END7664USNP/150099;
заявка на патент США № __________, озаглавленная SURGICAL STAPLER HAVING CURRENT MIRROR-BASED MOTOR CONTROL; досье патентного поверенного № END7665USNP/150100; и
заявка на патент США № __________, озаглавленная SURGICAL STAPLER HAVING MOTOR CONTROL BASED ON AN ELECTRICAL PARAMETER RELATED TO A MOTOR CURRENT; досье патентного поверенного № END7666USNP/150101.
Заявителю настоящей заявки принадлежат представленные ниже заявки на патенты, поданные 6 марта 2015 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/640,746, озаглавленная POWERED SURGICAL INSTRUMENT;
заявка на патент США № 14/640,765, озаглавленная SYSTEM FOR DETECTING THE MIS-INSERTION OF A STAPLE CARTRIDGE INTO A SURGICAL STAPLER;
заявка на патент США № 14/640,780, озаглавленная SURGICAL INSTRUMENT COMPRISING A LOCKABLE BATTERY HOUSING;
заявка на патент США № 14/640,795, озаглавленная MULTIPLE LEVEL THRESHOLDS TO MODIFY OPERATION OF POWERED SURGICAL INSTRUMENTS;
заявка на патент США № 14/640,799, озаглавленная SIGNAL AND POWER COMMUNICATION SYSTEM POSITIONED ON A ROTATABLE SHAFT;
заявка на патент США № 14/640,817, озаглавленная INTERACTIVE FEEDBACK SYSTEM FOR POWERED SURGICAL INSTRUMENTS;
заявка на патент США № 14/640,831, озаглавленная MONITORING SPEED CONTROL AND PRECISION INCREMENTING OF MOTOR FOR POWERED SURGICAL INSTRUMENTS;
заявка на патент США № 14/640,832, озаглавленная ADAPTIVE TISSUE COMPRESSION TECHNIQUES TO ADJUST CLOSURE RATES FOR MULTIPLE TISSUE TYPES;
заявка на патент США № 14/640,837, озаглавленная SMART SENSORS WITH LOCAL SIGNAL PROCESSING;
заявка на патент США № 14/640,844, озаглавленная CONTROL TECHNIQUES AND SUB-PROCESSOR CONTAINED WITHIN MODULAR SHAFT WITH SELECT CONTROL PROCESSING FROM HANDLE;
заявка на патент США № 14/640,859, озаглавленная TIME DEPENDENT EVALUATION OF SENSOR DATA TO DETERMINE STABILITY, CREEP, AND VISCOELASTIC ELEMENTS OF MEASURES; и
заявка на патент США № 14/640,935, озаглавленная OVERLAID MULTI SENSOR RADIO FREQUENCY (RF) ELECTRODE SYSTEM TO MEASURE TISSUE COMPRESSION.
Заявителю настоящей заявки принадлежат представленные ниже заявки на патенты, поданные 27 февраля 2015 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/633,526, озаглавленная ADAPTABLE SURGICAL INSTRUMENT HANDLE;
заявка на патент США № 14/633,541, озаглавленная MODULAR STAPLING ASSEMBLY;
заявка на патент США № 14/633,542, озаглавленная REINFORCED BATTERY FOR A SURGICAL INSTRUMENT;
заявка на патент США № 14/633,546, озаглавленная SURGICAL APPARATUS CONFIGURED TO ASSESS WHETHER A PERFORMANCE PARAMETER OF THE SURGICAL APPARATUS IS WITHIN AN ACCEPTABLE PERFORMANCE BAND;
заявка на патент США № 14/633,548, озаглавленная POWER ADAPTER FOR A SURGICAL INSTRUMENT;
заявка на патент США № 14/633,555, озаглавленная SYSTEM FOR MONITORING WHETHER A SURGICAL INSTRUMENT NEEDS TO BE SERVICED;
заявка на патент США № 14/633 560, озаглавленная SURGICAL CHARGING SYSTEM THAT CHARGES AND/OR CONDITIONS ONE OR MORE BATTERIES;
заявка на патент США № 14/633,562, озаглавленная SURGICAL APPARATUS CONFIGURED TO TRACK AN END-OF-LIFE PARAMETER;
заявка на патент США № 14/633,566, озаглавленная CHARGING SYSTEM THAT ENABLES EMERGENCY RESOLUTIONS FOR CHARGING A BATTERY; и
заявка на патент США № 14/633,576, озаглавленная SURGICAL INSTRUMENT SYSTEM COMPRISING AN INSPECTION STATION.
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 18 декабря 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/574,478, озаглавленная SURGICAL INSTRUMENT SYSTEMS COMPRISING AN ARTICULATABLE END EFFECTOR AND MEANS FOR ADJUSTING THE FIRING STROKE OF A FIRING;
заявка на патент США № 14/574,483, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING LOCKABLE SYSTEMS;
заявка на патент США № 14/574,493, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING A FLEXIBLE ARTICULATION SYSTEM;
заявка на патент США № 14/574,500, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING A LOCKABLE ARTICULATION SYSTEM;
заявка на патент США № 14/575,117, озаглавленная SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS;
заявка на патент США № 14/575,130, озаглавленная SURGICAL INSTRUMENT WITH AN ANVIL THAT IS SELECTIVELY MOVABLE ABOUT A DISCRETE NON-MOVABLE AXIS RELATIVE TO A STAPLE CARTRIDGE;
заявка на патент США № 14/575,139, озаглавленная DRIVE ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS;
заявка на патент США № 14/575,143, озаглавленная SURGICAL INSTRUMENTS WITH IMPROVED CLOSURE ARRANGEMENTS;
заявка на патент США № 14/575,148, озаглавленная LOCKING ARRANGEMENTS FOR DETACHABLE SHAFT ASSEMBLIES WITH ARTICULATABLE SURGICAL END EFFECTORS; и
заявка на патент США № 14/575,154, озаглавленная SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND IMPROVED FIRING BEAM SUPPORT ARRANGEMENTS.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 5 сентября 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/478,895, озаглавленная MULTIPLE SENSORS WITH ONE SENSOR AFFECTING A SECOND SENSOR'S OUTPUT OR INTERPRETATION;
заявка на патент США № 14/478,908, озаглавленная MONITORING DEVICE DEGRADATION BASED ON COMPONENT EVALUATION;
заявка на патент США № 14/479,098, озаглавленная SMART CARTRIDGE WAKE UP OPERATION AND DATA RETENTION;
заявка на патент США № 14/479,103, озаглавленная CIRCUITRY AND SENSORS FOR POWERED MEDICAL DEVICE;
заявка на патент США № 14/479,108, озаглавленная LOCAL DISPLAY OF TISSUE PARAMETER STABILIZATION;
заявка на патент США № 14/479,110, озаглавленная USE OF POLARITY OF HALL MAGNET DETECTION TO DETECT MISLOADED CARTRIDGE;
заявка на патент США № 14/479,115, озаглавленная MULTIPLE MOTOR CONTROL FOR POWERED MEDICAL DEVICE; и
заявка на патент США № 14/479,119, озаглавленная ADJUNCT WITH INTEGRATED SENSORS TO QUANTIFY TISSUE COMPRESSION.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 9 апреля 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/248,581, озаглавленная SURGICAL INSTRUMENT COMPRISING A CLOSING DRIVE AND A FIRING DRIVE OPERATED FROM THE SAME ROTATABLE OUTPUT, в настоящее время публикация заявки на патент США № 2014/0305989;
заявка на патент США 14/248,584, озаглавленная MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH ALIGNMENT FEATURES FOR ALIGNING ROTARY DRIVE SHAFTS WITH SURGICAL END EFFECTOR SHAFTS, в настоящее время публикация заявки на патент США № 2014/0305994;
заявка на патент США № 14/248,586, озаглавленная DRIVE SYSTEM DECOUPLING ARRANGEMENT FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305990;
заявка на патент США № 14/248,587, озаглавленная POWERED SURGICAL STAPLER, в настоящее время публикация заявки на патент США № 2014/0309665;
заявка на патент США № 14/248,588, озаглавленная POWERED LINEAR SURGICAL STAPLER, в настоящее время публикация заявки на патент США № 2014/0309666;
заявка на патент США № 14/248,590, озаглавленная MOTOR DRIVEN SURGICAL INSTRUMENTS WITH LOCKABLE DUAL DRIVE SHAFTS, в настоящее время публикация заявки на патент США № 2014/0305987;
заявка на патент США № 14/248,591, озаглавленная TRANSMISSION ARRANGEMENT FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305991;
заявка на патент США № 14/248,595, озаглавленная SURGICAL INSTRUMENT SHAFT INCLUDING SWITCHES FOR CONTROLLING THE OPERATION OF THE SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305988; и
заявка на патент США № 14/248,607, озаглавленная MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH STATUS INDICATION ARRANGEMENTS, в настоящее время публикация заявки на патент США № 2014/0305992.
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 26 марта 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/226,071, озаглавленная SURGICAL INSTRUMENT CONTROL CIRCUIT HAVING A SAFETY PROCESSOR;
заявка на патент США № 14/226,075, озаглавленная MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFT ASSEMBLIES;
заявка на патент США № 14/226,076, озаглавленная POWER MANAGEMENT THROUGH SEGMENTED CIRCUIT AND VARIABLE VOLTAGE PROTECTION;
заявка на патент США № 14/226,081, озаглавленная SYSTEMS AND METHODS FOR CONTROLLING A SEGMENTED CIRCUIT;
заявка на патент США № 14/226,093, озаглавленная FEEDBACK ALGORITHMS FOR MANUAL BAILOUT SYSTEMS FOR SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,094, озаглавленная VERIFICATION OF NUMBER OF BATTERY EXCHANGES/PROCEDURE COUNT;
заявка на патент США № 14/226 097, озаглавленная SURGICAL INSTRUMENT COMPRISING INTERACTIVE SYSTEMS;
заявка на патент США № 14/226,099, озаглавленная STERILIZATION VERIFICATION CIRCUIT;
заявка на патент США № 14/226,106, озаглавленная POWER MANAGEMENT CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,111, озаглавленная SURGICAL STAPLING INSTRUMENT SYSTEM;
заявка на патент США № 14/226,116, озаглавленная SURGICAL INSTRUMENT UTILIZING SENSOR ADAPTATION;
заявка на патент США № 14/226,117, озаглавленная POWER MANAGEMENT THROUGH SLEEP OPTIONS OF SEGMENTED CIRCUIT AND WAKE UP CONTROL;
заявка на патент США № 14/226,125, озаглавленная SURGICAL INSTRUMENT COMPRISING A ROTATABLE SHAFT;
заявка на патент США № 14/226,126, озаглавленная INTERFACE SYSTEMS FOR USE WITH SURGICAL INSTRUMENTS; и
заявка на патент США № 14/226,133, озаглавленная MODULAR SURGICAL INSTRUMENT SYSTEM.
Заявителю настоящей заявки принадлежит представленная ниже заявка на патент, поданная 7 марта 2014 г., которая полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/200,111, озаглавленная CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263539.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 16 апреля 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
предварительная заявка на патент США № 61/812,365, озаглавленная SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR;
предварительная заявка на патент США № 61/812,372, озаглавленная SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR;
предварительная заявка на патент США № 61/812,376, озаглавленная LINEAR CUTTER WITH POWER;
предварительная заявка на патент США № 61/812,382, озаглавленная LINEAR CUTTER WITH MOTOR AND PISTOL GRIP; и
предварительная заявка на патент США № 61/812,385, озаглавленная SURGICAL INSTRUMENT HANDLE WITH MULTIPLE ACTUATION MOTORS AND MOTOR CONTROL.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные 14 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 13/803,053, озаглавленная INTERCHANGEABLE SHAFT ASSEMBLIES FOR USE WITH A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0263564;
заявка на патент США № 13/803,066, озаглавленная DRIVE SYSTEM LOCKOUT ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263565;
заявка на патент США № 13/803,086, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK, в настоящее время публикация заявки на патент США № 2014/0263541;
заявка на патент США № 13/803,097, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE, в настоящее время публикация заявки на патент США № 2014/0263542;
заявка на патент США № 13/803,117, озаглавленная ARTICULATION CONTROL SYSTEM FOR ARTICULATABLE SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263553;
заявка на патент США № 13/803,130, озаглавленная DRIVE TRAIN CONTROL ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263543;
заявка на патент США № 13/803,148, озаглавленная MULTI-FUNCTION MOTOR FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0263554;
заявка на патент США № 13/803,159, озаглавленная METHOD AND SYSTEM FOR OPERATING A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0277017;
заявка на патент США № 13/803,193, озаглавленная CONTROL ARRANGEMENTS FOR A DRIVE MEMBER OF A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0263537; и
заявка на патент США № 13/803,210, озаглавленная SENSOR ARRANGEMENTS FOR ABSOLUTE POSITIONING SYSTEM FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263538.
Заявителю настоящей заявки принадлежат представленные ниже заявки на патенты, поданные 1 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 13/782,295, озаглавленная Articulatable Surgical Instruments With Conductive Pathways For Signal Communication, в настоящее время публикация заявки на патент США № 2014/0246471;
заявка на патент США № 13/782,323, озаглавленная Rotary Powered Articulation Joints For Surgical Instruments, в настоящее время публикация заявки на патент США № 2014/0246472;
заявка на патент США № 13/782,338, озаглавленная Thumbwheel Switch Arrangements For Surgical Instruments, в настоящее время публикация заявки на патент США № 2014/0249557;
заявка на патент США № 13/782,358, озаглавленная Joystick Switch Assemblies For Surgical Instruments, в настоящее время патентная публикация США № 2014/0246477;
заявка на патент США № 13/782,375, озаглавленная Rotary Powered Surgical Instruments With Multiple Degrees of Freedom, в настоящее время публикация заявки на патент США № 2014/0246473;
заявка на патент США № 13/782,460, озаглавленная Multiple Processor Motor Control for Modular Surgical Instruments, в настоящее время публикация заявки на патент США № 2014/0246478;
заявка на патент США № 13/782,481, озаглавленная Sensor Straightened End Effector During Removal Through Trocar, в настоящее время публикация заявки на патент США № 2014/0246479;
заявка на патент США № 13/782,499, озаглавленная Electromechanical Surgical Device with Signal Relay Arrangement, в настоящее время публикация заявки на патент США № 2014/0246474;
заявка на патент США № 13/782,518, озаглавленная Control Methods for Surgical Instruments with Removable Implement Portions, в настоящее время публикация заявки на патент США № 2014/0246475; и
заявка на патент США № 13/782,536, озаглавленная Surgical Instrument Soft Stop, в настоящее время публикация заявки на патент США № 2014/0246476.
В настоящем документе приведены подробные сведения, необходимые для понимания общей конструкции, функциональности, особенностей изготовления и применения различных вариантов осуществления, описание которых предоставлено в спецификации и проиллюстрировано сопроводительными чертежами. Хорошо известные принципы работы, компоненты и элементы не получили в настоящем документе подробного описания, чтобы не затруднять понимание вариантов осуществления, описанных в спецификации. Читатель должен понимать, что варианты осуществления, описанные и проиллюстрированные в настоящем документе, являются не имеющими ограничительного характера примерами. Следует понимать, что определенные конструктивные и функциональные особенности, описанные в данном документе, могут иметь показательный или пояснительный характер. Изменения и модификации вариантов осуществления, описанных и проиллюстрированных в данном документе, могут выполняться в пределах объема формулы изобретения.
Термины «содержать» (и любые его формы, такие как «содержит» и «содержащий»), «иметь» (и любые его формы, такие как «имеет» и «имеющий»), «включать» (и любые его формы, такие как «включает» и «включающий»), «вмещать» (и любые его формы, такие как «вмещает» и «вмещающий») представляют собой неограниченные связующие глаголы. В результате, хирургическая система или устройство, которое «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами. Аналогично элемент системы или устройства, который «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к участку, расположенному ближе всего к врачу, а термин «дистальный» относится к участку, удаленному от врача. Предлагается также для удобства и ясности применительно к рисункам использовать в настоящем документе такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз». Тем не менее, поскольку использование хирургических инструментов предполагает множество ориентаций и положений, указанные термины не следует толковать как ограничивающие и (или) абсолютные.
Для выполнения лапароскопических и минимально инвазивных хирургических вмешательств предложены различные примеры устройств и способов. Однако читателю будет вполне понятно, что различные способы и устройства, описанные в настоящем документе, можно применять в множестве хирургических вмешательств и сфер применения, включая, например, те, что связаны открытыми оперативными вмешательствами. По ходу данного подробного описания читатель сможет в еще большей мере оценить, что разнообразные инструменты, описанные в данном документе, могут быть введены в тело любым способом - как через естественные отверстия, так и через разрез или пункционное отверстие, проделанное в тканях, и т. п. Рабочая часть или насадки концевых зажимов таких инструментов могут быть введены непосредственно в тело пациента либо через устройство доступа, имеющего рабочий канал, через который можно провести концевой зажим и удлиненный стержень хирургического инструмента.
Хирургическая сшивающая система может содержать ствол и концевой проходящий от ствола эффектор. Концевой эффектор может включать первую браншу и вторую браншу. Первая бранша содержит кассету со скобами. Кассета со скобами выполнена с возможностью вставки в первую браншу и удаления из нее; однако предусмотрены другие варианты осуществления, в которых кассета со скобами выполнена без возможности извлечения из первой бранши или, по меньшей мере, выполнена с возможностью быстрой замены из первой бранши. Вторая бранша содержит упор, выполненный с возможностью деформации скоб, выталкиваемых из кассеты со скобами. Вторая бранша выполнена с возможностью поворота относительно первой бранши вокруг оси закрытия; однако предусмотрены другие варианты осуществления, в которых первая бранша выполнена с возможностью поворота относительно второй бранши. Хирургическая сшивающая система дополнительно содержит шарнирное сочленение, выполненное с возможностью обеспечения вращения или шарнирного поворота концевого эффектора относительно ствола. Концевой эффектор выполнен с возможностью вращения вокруг оси шарнирного сочленения, проходящей через шарнирное сочленение. Предусмотрены другие варианты осуществления, которые не включают шарнирное сочленение.
Кассета со скобами содержит корпус кассеты. Корпус кассеты включает проксимальный конец, дистальный конец и платформу, проходящую между проксимальным концом и дистальным концом. В процессе применения кассета со скобами расположена на первой стороне ткани, подлежащей сшиванию, а упор расположен на второй стороне ткани. Упор перемещается к кассете со скобами для сжатия и прижимания ткани к платформе. После этого скобы, хранящиеся в корпусе кассеты с возможностью извлечения, можно размещать в ткани. Корпус кассеты включает сформированные в нем полости для скоб, при этом скобы хранятся в полостях для скоб с возможностью извлечения. Полости для скоб расположены в шесть продольных рядов. Три ряда полостей для скоб расположены на первой стороне продольного паза, и три ряда полостей для скоб расположены на второй стороне продольного паза. Возможны другие конструкции скоб и полостей для скоб.
В корпусе кассеты скобы поддерживаются с помощью выталкивателей скоб. Выталкиватели выполнены с возможностью перемещения между первым или неактивированным положением и вторым или активированным положением для выталкивания скоб из полостей для скоб. Выталкиватели удерживаются в корпусе кассеты с помощью фиксатора, который проходит вокруг нижней части корпуса кассеты и включает упругие элементы, выполненные с возможностью захвата корпуса кассеты и удерживания фиксатора относительно корпуса кассеты. Выталкиватели выполнены с возможностью перемещения между их неактивированными положениями и активированными положениями с помощью салазок. Салазки выполнены с возможностью перемещения между проксимальным положением, смежным с проксимальным концом, и дистальным положением, смежным с дистальным концом. Салазки содержат множество наклонных поверхностей, выполненных с возможностью скольжения под выталкивателями и подъема выталкивателей и поддерживаемых на них скоб к упору.
В дополнение к указанному выше, салазки перемещаются дистально с помощью пускового элемента. Пусковой элемент выполнен с возможностью контакта с салазками и проталкивания салазок к дистальному концу. Продольный паз, сформированный в корпусе кассеты, выполнен с возможностью приема пускового элемента. Упор также включает паз, выполненный с возможностью приема пускового элемента. Пусковой элемент дополнительно содержит первый кулачок, который взаимодействует с первой браншей, и второй кулачок, который взаимодействует со второй браншей. При выдвижении пускового элемента дистально первый кулачок и второй кулачок позволяют контролировать расстояние, или тканевый зазор, между платформой кассеты со скобами и упором. Пусковой элемент также содержит скальпель, выполненный с возможностью рассечения ткани, захваченной между кассетой со скобами и упором. Желательно, по меньшей мере, частично располагать скальпель проксимально по отношению к наклонным поверхностям таким образом, чтобы скобы выталкивались раньше скальпеля.
На ФИГ. 1-6 представлен хирургический режущий и сшивающий инструмент с двигателем 10, который может или не может использоваться многократно. В показанных примерах хирургический инструмент 10 имеет корпус 12, который содержит узел 14 рукоятки, выполненный с возможностью захвата, манипулирования и активирования врачом. Корпус 12 выполнен с возможностью функционального прикрепления к сменному узлу 200 стержня, который имеет хирургический концевой эффектор 300, функционально соединенный с ним, который выполнен с возможностью выполнения одной или более хирургических задач или процедур. По мере изучения настоящего подробного описания будет понятно, что различные уникальные и инновационные механизмы различных форм сменных узлов стержня, раскрытые в настоящем документе, также могут эффективно применяться в связи с хирургическими системами с роботизированным управлением. Таким образом, термин «корпус» также может охватывать корпус или аналогичную часть роботизированной системы, которая вмещает или иным образом функционально поддерживает по меньшей мере одну приводную систему, выполненную с возможностью генерирования и применения по меньшей мере одного управляющего движения, которое может применяться для приведения в действие сменных узлов стержня, описанных в настоящем документе, и их соответствующих эквивалентов. Термин «рама» может относиться к участку ручного хирургического инструмента. Термин «рама» также может представлять собой часть хирургического инструмента с роботизированным управлением и/или часть роботизированной системы, которая может применяться для функционального управления хирургическим инструментом. Например, сменные узлы стержня, описанные в настоящем документе, могут применяться с различными роботизированными системами, инструментами, компонентами и способами, изложенными в заявке на патент США № 13/118,241, озаглавленной «SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS», в настоящее время публикация заявки на патент США № 2012/0298719. Заявка на патент США № 13/118,241, озаглавленная SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS, в настоящее время патент США № 9 072 535, полностью включена в настоящий документ путем ссылки.
Корпус 12, представленный на ФИГ. 1-3, показан в соединении со сменным узлом 200 стержня, который имеет концевой эффектор 300, содержащий хирургическое режущее и сшивающее устройство, которое выполнено с возможностью функциональной поддержки в нем кассеты 304 со скобами. Корпус 12 может быть выполнен с возможностью использования со сменными узлами стержней, которые имеют концевые эффекторы, приспособленные для поддерживания кассет со скобами различных размеров и типов, и обладают разной длиной стержня, размером, типом и т. д. Кроме того, корпус 12 можно эффективно применять с различными сменными узлами стержней, включая те узлы, которые выполнены с возможностью приложения других движений и форм энергии, таких как, например, радиочастотная (РЧ) энергия, ультразвуковая энергия и/или движение, в виде конструкций концевых эффекторов, адаптированных для использования в различных сферах применения и процедурах. Более того, в концевых эффекторах, узлах стержня, рукоятках, хирургических инструментах и/или системах хирургических инструментов для фиксации ткани может использоваться любой подходящий крепежный элемент или крепежные элементы. Например, кассета с крепежными элементами, содержащая множество хранящиеся в ней с возможностью извлечения крепежных элементов, может съемно вводиться и/или прикрепляться к концевому эффектору узла стержня.
На ФИГ. 1 показан хирургический инструмент 10 с функционально соединенным с ним сменным узлом 200 стержня. На ФИГ. 2 и 3 изображено крепление сменного узла 200 стержня к корпусу 12 или узлу 14 рукоятки. Как показано на ФИГ. 4, узел 14 рукоятки может содержать пару взаимно соединенных корпусных сегментов 16 и 18 ручки, которые могут быть соединены винтами, защелками, клеем и т. п. В показанной конструкции корпусные сегменты 16 и 18 ручки в совокупности образуют участок 19 пистолетной рукоятки, которую можно захватывать рукой и которой может манипулировать врач. Как будет дополнительно более подробно описано ниже, узел 14 рукоятки функционально поддерживает в себе множество приводных систем, которые выполнены с возможностью генерирования и приложения различных управляющих движений к соответствующим частям сменного узла стержня, к которому эти системы функционально прикреплены.
Как показано на ФИГ. 4, узел 14 рукоятки может дополнительно включать в себя раму 20, функционально поддерживающую множество приводных систем. Например, рама 20 может функционально поддерживать первую систему, или систему закрывающего привода, по существу обозначенную как элемент 30, которая может быть реализована для приложения закрывающих и открывающих движений к сменному узлу 200 стержня, который функционально соединен с ним или прикреплен к нему. По меньшей мере в одной форме система 30 закрывающего привода может включать в себя исполнительный механизм в форме закрывающего спускового механизма 32, который вращательно поддерживается рамой 20. В частности, как показано на ФИГ. 4, закрывающий спусковой механизм 32 соединен с возможностью поворота с корпусом 14 с помощью штифта 33. Такая конструкция позволяет врачу манипулировать закрывающим спусковым механизмом 32 так, что, когда врач захватывает участок пистолетной рукоятки 19 узла 14 рукоятки, закрывающий спусковой механизм 32 может быть легко повернут из исходного, или неактивированного, положения в активированное положение, а более конкретно - в полностью нажатое или полностью активированное положение. Закрывающий спусковой механизм 32 может быть смещен в неактивированное положение с помощью пружины или другого смещающего механизма (не показан). В различных формах система закрывающего привода 30 дополнительно включает в себя узел 34 закрывающего звена, который вращательно соединен с закрывающим спусковым механизмом 32. Как показано на ФИГ. 4, узел 34 закрывающего звена может иметь первое закрывающее звено 36 и второе закрывающее звено 38, которые шарнирно соединены с закрывающим спусковым механизмом 32 штифтом 35. Второе закрывающее звено 38 также в настоящем документе может называться крепежным элементом и иметь поперечный крепежный штифт 37.
Как показано на ФИГ. 4, на первом закрывающем звене 36 может присутствовать блокирующая стенка, или конец, 39, выполненный с возможностью совместной работы с узлом высвобождения закрывающего механизма 60, шарнирно соединенным с рамой 20. В по меньшей мере одной форме узел 60 высвобождения закрывающего механизма может содержать узел 62 кнопки высвобождения, на котором присутствует выступающая дистально блокирующая собачка 64. Узел кнопки высвобождения 62 может вращаться в направлении против часовой стрелки с помощью пружины высвобождения (не показана). Когда врач нажимает на закрывающий спусковой механизм 32 и выводит его из неактивированного положения к участку пистолетной рукоятки 19 узла 14 рукоятки, первое закрывающее звено 36 вращается вверх до точки, в которой блокирующая собачка 64 входит в удерживающее зацепление с блокирующей стенкой 39 на первом закрывающем звене 36, посредством этого не позволяя закрывающему спусковому механизму 32 вернуться в неактивированное положение. См. ФИГ. 18. Таким образом, узел высвобождения закрывающего механизма 60 служит для блокировки закрывающего спускового механизма 32 в полностью активированном положении. Когда врачу нужно разблокировать закрывающий спусковой механизм 32, чтобы он смог сместиться в неактивированное положение, врач просто вращает узел 62 кнопки высвобождения закрывающего механизма так, чтобы блокирующая собачка 64 вышла из зацепления с блокирующей стенкой 39 на первом закрывающем звене 36. После того как блокирующая собачка 64 вышла из зацепления с первым закрывающим звеном 36, закрывающий спусковой механизм 32 может вращаться назад в неактивированное положение. Также возможна реализация других блокирующих и высвобождающих механизмов закрывающего спускового механизма.
В дополнение к приведенному выше, на ФИГ. 13-15 показан закрывающий спусковой механизм 32 в своем неактивированном положении, которое связано с открытым, или разжатым, положением узла 200 стержня, в котором ткань может быть расположена между браншами узла 200 стержня. На ФИГ. 16-18 показан закрывающий спусковой механизм 32 в своем активированном положении, которое связано с закрытым или сжатым положением узла 200 стержня, в котором ткань зажата между браншами узла 200 стержня. При сравнении ФИГ. 14 и 17, читателю будет понятно, что, когда закрывающий спусковой механизм 32 перемещается из неактивированного положения (ФИГ. 14) в активированное положение (ФИГ. 17), кнопка 62 высвобождения закрывающего механизма поворачивается между первым положением (ФИГ. 14) и вторым положением (ФИГ. 17). Поворот кнопки 62 высвобождения закрывающего механизма можно назвать поворотом вверх; однако по меньшей мере часть кнопки 62 высвобождения закрывающего механизма поворачивается к печатной плате 100. Как показано на ФИГ. 4, кнопка 62 высвобождения закрывающего механизма может включать в себя проходящее от нее ответвление 61 и магнитный элемент 63, такой как, например, постоянный магнит, установленный на ответвлении 61. Когда кнопка 62 высвобождения закрывающего механизма поворачивается из своего первого положение во второе положение, магнитный элемент 63 может перемещаться к печатной плате 100. Печатная плата 100 может включать в себя по меньшей мере один датчик, выполненный с возможностью определения перемещения магнитного элемента 63. По меньшей мере в одном аспекте на нижнюю поверхность печатной платы 100 может быть установлен, например, датчик 65 магнитного поля. Датчик 65 магнитного поля может быть выполнен с возможностью определения изменения магнитного поля, окружающего датчик 65 магнитного поля, вызванного перемещением магнитного элемента 63. Датчик 65 магнитного поля может, например, обмениваться сигналами с микроконтроллером 1500 (ФИГ. 19), который может определять, находится ли кнопка 62 высвобождения закрывающего механизма в первом положении, которое связано с неактивированным положением закрывающего спускового механизма 32 и открытой конфигурацией концевого эффектора, во втором положении, которое связано с активированным положением закрывающего спускового механизма 32 и закрытой конфигурацией концевого эффектора, и/или в любом положении между первым и вторым положением.
В рамках настоящего описания датчик магнитного поля может представлять собой, помимо прочего, датчик Холла, индукционную катушку, магнитный датчик с оптической накачкой, ядерную прецессию, сверхпроводящий магнитометр (SQUID), эффект Холла, анизотропное магнитосопротивление, гигантское магнитосопротивление, магнитные туннельные переходы, гигантский магнитоимпеданс, магнитострикционные/пьезоэлектрические композиты, магнитодиод, магнитотранзистор, оптоволокно, магнитооптические датчики и магнитные датчики на основании микроэлектромеханических систем.
По меньшей мере, в одной форме узел 14 рукоятки и рама 20 могут функционально поддерживать другую приводную систему, которая в настоящем документе называется системой 80 пускового привода, выполненную с возможностью приложения пусковых движений к соответствующим участкам прикрепленного к нему сменного узла стержня. В настоящем документе система 80 пускового привода также может называться второй приводной системой. В системе 80 пускового привода может применяться электрический двигатель 82, который размещен в участке 19 пистолетной рукоятки узла 14 рукоятки. В различных формах двигатель 82 может представлять собой приводной щеточный двигатель постоянного тока с максимальной скоростью поворота, например, приблизительно 25 000 оборотов в минуту. В других конструкциях двигатель 82 может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель. Двигатель 82 может получать электропитание от источника питания 90, который в одной форме может содержать съемный блок питания 92. Как показано, например, на ФИГ. 4, блок питания 92 может содержать проксимальный участок 94 корпуса, который выполнен с возможностью крепления к дистальному участку 96 корпуса. Проксимальный участок 94 корпуса и дистальный участок 96 корпуса выполнены с возможностью функциональной поддерживания в них множества батарей 98. Каждая батарея 98 может представлять собой, например, литий-ионную («LI») или другую подходящую батарею. Дистальный участок 96 корпуса выполнен с возможностью съемного функционального крепления к узлу 100 управляющей печатной платы, который также функционально связан с двигателем 82. В качестве источника электропитания хирургического инструмента 10 может применяться ряд последовательно соединенных батарей 98. Кроме того, блок питания 90 может быть сменным и/или перезаряжаемым.
Как кратко описано выше в отношении различных других форм, электрический двигатель 82 может включать в себя поворачиваемый стержень (не показан), функционально стыкующийся с узлом зубчатого редуктора 84, который монтируется так, что находится в зубчатом зацеплении с набором, или рейкой, приводных зубцов 122 на выполненном с возможностью продольного перемещения приводном элементе 120. В процессе применения полярность напряжения, обеспечиваемая источником 90 питания, позволяет электрическому двигателю 82 вращаться в направлении по часовой стрелке, причем полярность напряжения, приложенную к электрическому двигателю батареей, можно изменить на обратную для работы электрического двигателя 82 в направлении против часовой стрелки. Когда электрический двигатель 82 поворачивается в одном направлении, приводной элемент 120 будет приводиться в движение в дистальном направлении DD по оси. При приведении двигателя 82 в движение в противоположном направлении вращения приводной элемент 120 будет приводиться в движение по оси в проксимальном направлении PD. Узел 14 рукоятки может иметь переключатель, который может быть выполнен с возможностью изменения на обратную полярности, прилагаемой к электродвигателю 82 блоком питания 90. Как и в других формах, описанных в настоящем документе, узел 14 рукоятки также может включать в себя датчик, выполненный с возможностью обнаружения положения приводного элемента 120 и/или направления, в котором перемещается приводной элемент 120.
Активацией двигателя 82 можно управлять с помощью пускового крючка 130, вращательно поддерживаемого на узле 14 рукоятки. Пусковой крючок 130 можно поворачивать между неактивированным положением и активированным положением. Пусковой крючок 130 может смещаться в неактивированное положение с помощью пружины 132 или другого смещающего механизма так, что, когда врач высвобождает пусковой крючок 130, его можно вращать или иным образом возвращать в неактивированное положение с помощью пружины 132 или смещающего механизма. По меньшей мере, в одной форме пусковой крючок 130 может быть расположен на удалении от закрывающего спускового механизма 32, как было описано выше. По меньшей мере, в одной форме к закрывающему спусковому механизму 32 может монтироваться кнопка предохранителя пускового крючка 134 с помощью штифта 35 с возможностью поворота. Кнопка 134 предохранителя может быть расположена между пусковым крючком 130 и закрывающим спусковым механизмом 32 и иметь выступающее поворотное плечо 136. См. ФИГ. 4. Когда закрывающий спусковой механизм 32 находится в неактивированном положении, кнопка 134 предохранителя содержится в узле 14 рукоятки, где врач не может получить к ней простой доступ и переместить ее между безопасным положением, предотвращающим активацию пускового крючка 130, и пусковым положением, в котором пусковой крючок 130 может быть нажат. Когда врач нажимает на закрывающий спусковой механизм 32, кнопка предохранителя 134 и пусковой крючок 130 вращаются вниз, и в этом положении врач может манипулировать ими.
Как описано выше, узел 14 рукоятки может включать в себя закрывающий спусковой механизм 32 и пусковой крючок 130. Как показано на ФИГ. 14-18A, пусковой крючок 130 может быть установлен с возможностью поворота на закрывающем спусковом механизме 32. Закрывающий спусковой механизм 32 может содержать проходящее от него ответвление 31 и пусковой крючок 130 может быть установлен на ответвлении 31 с возможностью поворота относительно поворотного штифта 33. Когда закрывающий спусковой механизм 32 перемещается из неактивированного положения (ФИГ. 14) в активированное положение (ФИГ. 17), пусковой крючок 130 может опускаться вниз, как кратко описано выше. После перемещения кнопки 134 предохранителя в пусковое положение, как показано на ФИГ. 18A, можно нажать пусковой крючок 130 для приведения в действие двигателя пусковой системы хирургического инструмента. В различных случаях узел 14 рукоятки может включать в себя систему слежения, такую как, например, система 800, выполненную с возможностью определения положения закрывающего спускового механизма 32 и/или положения пускового крючка 130. Как главным образом показано на ФИГ. 14, 17 и 18A, система 800 слежения может содержать магнитный элемент, такой как постоянный магнит 802, например, который установлен на ответвлении 801, проходящем от пускового крючка 130. Система 800 слежения может содержать один или более датчиков, например, таких как первый датчик 803 магнитного поля и второй датчик 804 магнитного поля, которые могут быть выполнены с возможностью отслеживания положения магнита 802.
При сравнении ФИГ. 14 и 17, читателю будет понятно, что, когда закрывающий спусковой механизм 32 перемещается из неактивированного положения в активированное положение, магнит 802 может перемещаться между первым положением рядом с первым датчиком 803 магнитного поля и вторым положением рядом со вторым датчиком 804 магнитного поля.
При сравнении ФИГ. 17 и 18A, читателю также будет понятно, что, когда пусковой крючок 130 перемещается из неактивированного положения (ФИГ. 17) в активированное положение (ФИГ. 18A), магнит 802 может перемещаться относительно второго датчика 804 магнитного поля. Датчики 803 и 804 могут отслеживать перемещение магнита 802 и могут обмениваться сигналами с микроконтроллером на печатной плате 100. За счет использования данных от первого датчика 803 и/или второго датчика 804, микроконтроллер может определять положение магнита 802 вдоль заданного пути, и, на основании этого положения, микроконтроллер может определять, находится закрывающий спусковой механизм 32 в неактивированном положении, активированном положении или промежуточном положении. Аналогично, за счет использования данных от первого датчика 803 и/или второго датчика 804, микроконтроллер может определять положение магнита 802 вдоль заданного пути, и, на основании этого положения, микроконтроллер может определять, находится закрывающий спусковой механизм 130 в неактивированном положении, полностью активированном положении или промежуточном положении.
Как указано выше, по меньшей мере в одной форме выполненный с возможностью продольного перемещения приводной элемент 120 имеет рейку образованных на нем зубцов 122 для зубчатого зацепления с соответствующей приводной шестерней 86 узла зубчатого редуктора 84. По меньшей мере одна форма также включает в себя приводимый в действие вручную аварийный узел 140, выполненный с возможностью того, чтобы врач мог вручную втягивать приводной элемент 120, выполненный с возможностью продольного перемещения, если двигатель 82 становится недоступен. Аварийный узел 140 может включать в себя узел рычага или аварийной рукоятки 142, выполненный с возможностью ручного вращения в храповое зацепление с зубцами 124 приводного элемента 120. Таким образом, врач может вручную оттянуть приводной элемент 120 с помощью узла аварийной рукоятки 142, чтобы передвинуть приводной элемент 120 с помощью храпового механизма в проксимальном направлении PD. В публикации заявки на патент США № 2010/0089970, в настоящее время патент США № 8 608 045, описаны аварийные механизмы и другие компоненты, механизмы и системы, которые также могут применяться с различными инструментами, описанными в настоящем документе. Заявка на патент США с серийным № 12/249,117, озаглавленная POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLY RETRACTABLE FIRING SYSTEM, публикация заявки на патент США № 2010/0089970, теперь патент США № 8,608,045, которая полностью включена в настоящий документ путем ссылки.
Как показано на ФИГ. 1 и 7, сменный узел 200 стержня имеет хирургический концевой эффектор 300, который содержит удлиненный канал 302, который выполнен с возможностью функциональной поддержки в нем кассеты 304 со скобами. Концевой эффектор 300 может дополнительно включать в себя упор 306, поддерживаемый с возможностью поворота относительно удлиненного канала 302. Сменный узел 200 стержня может дополнительно содержать шарнирное сочленение 270 и фиксатор 350 шарнира (ФИГ. 8), который может быть выполнен с возможностью разъемного удержания концевого эффектора 300 в требуемом положении относительно оси стержня SA-SA. Подробное описание конструкции и работы концевого эффектора 300, шарнирного сочленения 270 и фиксатора 350 шарнира представлено в заявке на патент США № 13/803,086, поданной 14 марта 2013 г., озаглавленной ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK, в настоящее время - публикация заявки на патент США № 2014/0263541. Полное описание заявки на патент США № 13/803,086, поданной 14 марта 2013 г., озаглавленной ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK, в настоящее время - публикация заявки на патент США № 2014/0263541, включено в настоящий документ путем ссылки. Как показано на ФИГ. 7 и 8, сменный узел 200 стержня может дополнительно содержать проксимальный корпус, или конус 201, состоящий из участков 202 и 203 конуса. Сменный узел стержня 200 может дополнительно включать в себя закрывающую трубку 260, которая может использоваться для закрытия и/или открытия упора 306 концевого эффектора 300. Как показано преимущественно на ФИГ. 8 и 9, узел 200 стержня может включать в себя цапфу 210, которая может быть выполнена с возможностью неподвижной поддержки участка 212 рамы ствола и фиксирующего элемента 350 шарнирного сочленения. См. ФИГ. 8. Цапфа 210 может быть выполнена с возможностью, во-первых, скользящей поддержки в ней пускового элемента 220, а, во-вторых, скользящей поддержки закрывающей трубки 260, которая проходит вокруг цапфы 210. Цапфа 210 также может быть выполнена с возможностью скользящей поддержки проксимального приводного элемента 230 шарнирного сочленения. Приводной элемент 230 шарнирного сочленения имеет дистальный конец 231, который выполнен с возможностью функционального взаимодействия с фиксирующим элементом 350 шарнирного сочленения. Фиксирующий элемент 350 шарнирного сочленения сопрягается с шарнирной рамой 352, которая выполнена с возможностью функционального взаимодействия с направляющим штифтом (не показан) рамы концевого эффектора (не показана). Как указано выше, дополнительная информация, касающаяся работы фиксирующего элемента 350 шарнирного сочленения и шарнирной рамы, содержится в заявке на патент США № 13/803,086, в настоящее время - публикация заявки на патент США № 2014/0263541. В различных обстоятельствах цапфа 210 может содержать проксимальный конец 211, который поддерживается с возможностью поворота на шасси 240. Например, в одной конструкции проксимальный конец 211 стержня 210 имеет резьбу 214, выполненную на нем для резьбового крепления к опоре 216 стержня, выполненной с возможностью поддержки на шасси 240. См. ФИГ. 7. Такая конструкция облегчает вращающееся крепление стержня 210 к шасси 240 таким образом, что стержень 210 может избирательно поворачиваться вокруг оси SA-SA ствола относительно шасси 240.
Как показано преимущественно на ФИГ. 7, сменный узел стержня 200 включает в себя закрывающий челнок 250, который скользящим образом поддерживается в шасси 240 так, что он может перемещаться в осевом направлении относительно него. Как показано на ФИГ. 3 и 7, закрывающий челнок 250 включает в себя пару проксимально выступающих крюков 252, которые выполнены с возможностью крепления к крепежному штифту 37, который присоединен ко второму закрывающему звену 38, как дополнительно будет более подробно описано ниже. Проксимальный конец 261 закрывающей трубки 260 связан с закрывающим челноком 250 для вращения относительно него. Например, U-образный соединитель 263 вставляется в кольцевой паз 262 на проксимальном конце 261 закрывающей трубки 260 и удерживается внутри вертикальных пазов 253 в закрывающем челноке 250. См. ФИГ. 7. Такая конструкция служит для крепления закрывающей трубки 260 к закрывающему челноку 250 для осевого перемещения с ним, при этом позволяя закрывающей трубке 260 поворачиваться относительно закрывающего челнока 250 вокруг оси SA-SA ствола. Закрывающая пружина 268 опирается на закрывающую трубку 260 и служит для смещения закрывающей трубки 260 в проксимальном направлении PD, которое может служить для поворачивания закрывающего спускового механизма в неактивированное положение, когда узел стержня функционально соединяется с узлом 14 рукоятки.
По меньшей мере в одной форме сменный узел стержня 200 может дополнительно включать в себя шарнирное сочленение 270. Однако другие сменные узлы стержня могут не осуществлять шарнирный поворот. Как показано на ФИГ. 7, например, шарнирное сочленение 270 включает в себя узел двухшарнирной закрывающей гильзы 271. В соответствии с различными формами узел двухшарнирной закрывающей гильзы 271 включает в себя узел закрывающей гильзы концевого эффектора 272, который имеет дистально выступающие верхний и нижний хвостовики 273, 274. Узел закрывающей гильзы 272 концевого эффектора включает в себя подковообразное отверстие 275 и язычок 276 для зацепления с открывающим язычком на упоре 306 различными способами, описанными в заявке на патент США № 13/803,086, поданной 14 марта 2013 г., озаглавленной ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK, в настоящее время публикация заявки на патент США № 2014/0263541, которая полностью включена в настоящий документ путем ссылки. Как более подробно описано далее в настоящем документе, подковообразное отверстие 275 и язычок 276 зацепляются с язычком на упоре, когда упор 306 открыт. Верхнее двухшарнирное звено 277 включает в себя выступающие вверх дистальный и проксимальный поворотные штифты, которые зацепляются соответственно с верхним дистальным отверстием для штифта в верхнем проксимально выступающем хвостовике 273 и с верхним проксимальным отверстием для штифта в верхнем дистально выступающем хвостовике 264 на закрывающей трубке 260. Нижнее двухшарнирное звено 278 включает в себя выступающие вверх дистальный и проксимальный шарнирные штифты, которые зацепляются соответственно с нижним дистальным штифтовым отверстием в нижнем проксимально выступающем хвостовике 274 и с нижним проксимальным штифтовым отверстием в нижнем дистально выступающем хвостовике 265. См. также ФИГ. 8.
В процессе применения закрывающая трубка 260 поступательно перемещается дистально (в направлении DD) для закрытия упора 306, например, в ответ на приведение в действие закрывающего спускового механизма 32. Упор 306 закрывается путем поступательного перемещения дистально закрывающей трубки 260 и, таким образом, узла закрывающей гильзы стержня 272, в результате чего он ударяется о проксимальную поверхность упора 360 способом, описанным в указанной выше путем ссылки заявке на патент США № 13/803,086, в настоящее время - публикация заявки на патент США № 2014/0263541. Как было подробно описано в этой ссылке, упор 306 открывается путем проксимального поступательного перемещения закрывающей трубки 260 и узла закрывающей гильзы стержня 272, в результате чего язычок 276 и подковообразное отверстие 275 входят в контакт с язычком упора и толкают его, поднимая упор 306. В положении с открытым упором закрывающая трубка стержня 260 перемещается в проксимальное положение.
Как указано выше, хирургический инструмент 10 может дополнительно содержать фиксирующий элемент 350 шарнирного сочленения типов и конструкции, описанной подробнее в заявке на патент США № 13/803,086, в настоящее время - публикация заявки на патент США № 2014/0263541, который может быть выполнен с возможностью и может работать так, чтобы обеспечивать избирательную блокировку концевого эффектора 300 в положении. Такие конструкции позволяют вращать или шарнирно поворачивать концевой эффектор 300 относительно закрывающей трубки 260 ствола, когда фиксирующий элемент 350 шарнирного сочленения находится в его незаблокированном состоянии. В таком незаблокированном состоянии концевой эффектор 300 может быть расположен и прижат к мягкой ткани и/или кости, например, окружающей операционное поле внутри организма пациента, в результате чего концевой эффектор 300 может шарнирно поворачиваться относительно закрывающей трубки 260. Концевой эффектор 300 также может шарнирно поворачиваться относительно закрывающей трубки 260 посредством приводного элемента шарнирного сочленения 230.
Как также указано выше, сменный узел 200 стержня дополнительно включает в себя пусковой элемент 220, поддерживаемый для осевого перемещения внутри цапфы 210 стержня. Пусковой элемент 220 включает в себя промежуточный участок 222 пускового стержня, выполненный с возможностью прикрепления к дистальному режущему участку или режущему полотну 280. Также в настоящем документе пусковой элемент 220 может называться «вторым стержнем» и/или «вторым узлом стержня». Как может быть показано на ФИГ. 8 и 9, промежуточная часть пускового стержня 222 может включать в себя продольную прорезь 223 в ее дистальном конце, которая может быть выполнена с возможностью принимать язычок 284 на проксимальном конце 282 дистального режущего полотна 280. Продольный паз 223 и проксимальный конец 282 могут быть выполнены по форме и размеру таким образом, чтобы обеспечивать относительное перемещение между ними, и могут содержать скользящее сочленение 286. Скользящее сочленение 286 может обеспечивать перемещение промежуточного участка 222 пускового ствола пускового привода 220 для перемещения так, чтобы обеспечить шарнирный поворот концевого эффектора 300 без перемещения или по меньшей мере по существу без перемещения дистальной пусковой штанги 280. После достижения надлежащей ориентации концевого эффектора 300, промежуточный участок 222 пускового ствола можно перемещать дистально, пока проксимальная боковая стенка продольной прорези 223 не войдет в контакт с язычком 284 для продвижения режущего полотна 280 и активации кассеты со скобами, размещенной в канале 302. Как показано на ФИГ. 8 и 9, цапфа 210 стержня содержит удлиненное отверстие или окно 213, упрощающее сборку и вставку промежуточного участка пускового ствола 222 в раму 210 стержня. После вставки промежуточного участка 222 пускового ствола верхний сегмент 215 рамы может зацепляться с рамой 212 ствола, заключая в нее промежуточный участок 222 пускового ствола и режущее полотно 280. Дополнительное описание работы пускового элемента 220 приведено в заявке на патент США № 13/803,086, в настоящее время публикация заявки на патент США № 2014/0263541.
В дополнение к указанному выше, узел стержня 200 может включать в себя узел сцепления 400, который может быть выполнен с возможностью избирательного и высвобождаемого соединения приводного элемента 230 шарнирного сочленения и пускового элемента 220. В одной форме узел 400 сцепления включает в себя фиксирующее кольцо, или гильзу, 402, расположенное вокруг пускового элемента 220, причем фиксирующая гильза 402 может поворачиваться между зацепленным положением, в котором фиксирующая гильза 402 соединяет приводной элемент 360 шарнирного сочленения с пусковым элементом 220, и расцепленным положением, в котором приводной элемент 360 шарнирного сочленения не связан функционально с пусковым элементом 200. Когда фиксирующая гильза 402 находится в ее зацепленном положении, дистальное перемещение пускового элемента 220 может перемещать приводной элемент 360 шарнирного сочленения дистально, и, соответственно, проксимальное перемещение пускового элемента 220 может перемещать приводной элемент 230 шарнирного сочленения проксимально. Когда фиксирующая гильза 402 находится в ее расцепленном положении, перемещение пускового элемента 220 не передается на приводной элемент 230 шарнирного сочленения, в результате чего пусковой элемент 220 может перемещаться независимо от приводного элемента 230 шарнирного сочленения. В различных обстоятельствах приводной элемент 230 шарнирного сочленения может удерживаться в положении с помощью фиксирующего элемента 350 шарнирного сочленения, когда приводной элемент 230 шарнирного сочленения не перемещается в проксимальное или дистальное направления с помощью пускового элемента 220.
Как показано преимущественно на ФИГ. 9, гильза блокировки 402 может содержать цилиндрический или по меньшей мере по существу цилиндрический корпус, включающий продольное отверстие 403, образованное с возможностью принимать пусковой элемент 220. Фиксирующая гильза 402 может содержать обращенные диаметрально внутрь фиксирующие выступы 404 и обращенный наружу фиксирующий элемент 406. Фиксирующие выступы 404 могут быть выполнены с возможностью избирательного зацепления с пусковым элементом 220. Более конкретно, когда фиксирующая гильза 402 находится в ее зацепленном положении, фиксирующие выступы 404 могут быть расположены внутри приводной прорези 224, образованной в пусковом элементе 220, таким образом, что дистальное толкающее усилие и/или проксимальное вытягивающее усилие может передаваться от пускового элемента 220 к фиксирующей гильзе 402. Когда фиксирующая гильза 402 находится в ее зацепленном положении, второй фиксирующий элемент 406 размещается внутри приводной щели 232, сформированной в приводном элементе 230 шарнирного сочленения таким образом, что дистальное толкающее усилие и/или проксимальное вытягивающее усилие, прикладываемое к фиксирующей гильзе 402, может передаваться к приводному элементу 230 шарнирного сочленения. В результате, когда фиксирующая гильза 402 находится в ее зацепленном положении, пусковой элемент 220, фиксирующая гильза 402 и приводной элемент 230 шарнирного сочленения будут перемещаться вместе. С другой стороны, когда фиксирующая гильза 402 находится в ее расцепленном положении, фиксирующие выступы 404 могут не быть расположены внутри приводной прорези 224 пускового элемента 220, в результате чего дистальное толкающее усилие и/или проксимальное вытягивающее усилие может не передаваться от пускового элемента 220 к фиксирующей гильзе 402. Соответственно, дистальное толкающее усилие и/или проксимальное вытягивающее усилие может не передаваться на приводной элемент 230 шарнирного сочленения. В таких обстоятельствах пусковой элемент 220 может скользить проксимально и/или дистально относительно фиксирующей гильзы 402 и проксимального приводного элемента 230 шарнирного сочленения.
Как показано на ФИГ. 8-12, узел 200 стержня дополнительно имеет барабан 500 переключателя, который размещен с возможностью вращения на закрывающей трубке 260. Барабан переключателя 500 содержит полый сегмент стержня 502, который имеет втулку 504 стержня, образованную на нем для размещения выступающего наружу приводного штифта 410. В различных обстоятельствах приводной штифт 410 проходит через паз 267 в продольный паз 408, предусмотренный в фиксирующей гильзе 402, чтобы обеспечивать осевое перемещение фиксирующей гильзы 402, когда она входит в зацепление с приводным элементом 230 шарнирного сочленения. Поворотная торсионная пружина 420 выполнена с возможностью вхождения в зацепление с втулкой 504 ствола на барабане 500 переключателя и частью корпуса 203 мундштука, как показано на ФИГ. 10, для приложения к барабану 500 переключателя усилия смещения. Барабан 500 переключателя дополнительно может содержать образованные в нем по меньшей мере частично кольцевые отверстия 506, которые, как показано на ФИГ. 5 и 6, могут быть выполнены с возможностью размещения кольцевых стоек 204, 205, проходящих от половин 202, 203 мундштука, и обеспечения относительного вращения, но не поступательного перемещения, между барабаном 500 переключателя и проксимальным мундштуком 201. Как показано на этих фигурах, стойки 204 и 205 также проходят через отверстия 266 в закрывающей трубке 260 и фиксируются в выемках 209 в цапфе 210 стержня. Однако вращение мундштука 201 до точки, в которой стойки 204, 205 достигают конца их соответствующих пазов 506 в барабане 500 переключателя, приводит к вращению барабана 500 переключателя вокруг оси SA-SA ствола. Вращение барабана 500 переключателя в конечном итоге приводит к повороту приводного штифта 410 и фиксирующей гильзы 402 между зацепленным и расцепленным положением. Таким образом, мундштук 201 можно по существу использовать для функционального взаимодействия и высвобождения системы привода шарнира и системы пускового привода различными способами, подробно описанными в заявке на патент США № 13/803,086, в настоящее время публикация заявки на патент США № 2014/0263541.
Как также показано на ФИГ. 8-12, узел 200 стержня может содержать узел токосъемного кольца 600, который может быть выполнен, например, с возможностью проведения электрического питания к концевому эффектору 300 и/или от него и/или сигналов связи к концевому эффектору 300 и/или от него. Узел 600 токосъемного кольца может содержать проксимальный соединительный фланец 604, который установлен на фланец 242 шасси, проходящий от шасси 240, и дистальный соединительный фланец 601, который расположен внутри паза, выполненного в корпусах 202, 203 ствола. Проксимальный соединительный фланец 604 может содержать первую лицевую поверхность, а дистальный соединительный фланец 601 может содержать вторую лицевую поверхность, которая расположена смежно с первой поверхностью и может перемещаться относительно нее. Дистальный соединительный фланец 601 может вращаться относительно проксимального соединительного фланца 604 вокруг оси SA-SA ствола. Проксимальный соединительный фланец 604 может содержать множество концентрических или по меньшей мере по существу концентрических проводников 602, выполненных в его первой лицевой поверхности. Соединитель 607 может быть установлен на проксимальной стороне соединительного фланца 601 и может иметь множество контактов (не показаны), причем каждый контакт соответствует одному из проводников 602 и находится с ним в электрическом контакте. Такая конструкция обеспечивает относительное вращение между проксимальным соединительным фланцем 604 и дистальным соединительным фланцем 601, сохраняя при этом электрический контакт между ними. Проксимальный соединительный фланец 604 может включать в себя электрический соединитель 606, который обеспечивает обмен сигналов между проводниками 602 и печатной платой 610 ствола, например, установленной на шасси 240 ствола. По меньшей мере в одном случае жгут проводов, состоящий из множества проводников, может проходить между электрическим соединителем 606 и печатной платой 610 ствола. Электрический соединитель 606 может идти проксимально через отверстие 243 для разъема, выполненное в монтажном фланце 242 шасси. См. ФИГ. 7. Заявка на патент США № 13/800,067, озаглавленная STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданная 13 марта 2013 г., в настоящее время публикация заявки на патент США № 2014/0263552, полностью включена в настоящий документ путем ссылки. Заявка на патент США № 13/800,025, озаглавленная STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданная 13 марта 2013 г., в настоящее время публикация заявки на патент США № 2014/0263551, полностью включена в настоящий документ путем ссылки. Дополнительная информация относительно узла 600 токосъемного кольца представлена в заявке на патент США № 13/803,086, в настоящее время публикация заявки на патент США № 2014/0263541.
Как обсуждалось выше, узел 200 стержня может иметь проксимальный участок, который неподвижно установлен на узле 14 рукоятки, и дистальный участок, который может поворачиваться вокруг продольной оси. Поворотный дистальный участок ствола может поворачиваться относительно проксимального участка вокруг узла 600 токосъемного кольца, как описано выше. Дистальный соединительный фланец 601 узла 600 токосъемного кольца может располагаться в поворотном дистальном участке ствола. Кроме того, в дополнение к указанному выше, барабан 500 переключателя также может располагаться в поворотном дистальном участке ствола. При вращении поворотного дистального участка ствола дистальный соединительный фланец 601 и барабан 500 переключателя могут поворачиваться синхронно. Кроме того, барабан 500 переключателя может поворачиваться между первым положением и вторым положением относительно дистального соединительного фланца 601. Когда барабан переключателя 500 находится в своем первом положении, система привода шарнира может быть функционально отсоединена от системы пускового привода и, таким образом, при работе системы пускового привода может не выполняться поворот концевого эффектора 300 узла стержня 200. Когда барабан переключателя 500 находится в своем втором положении, система привода шарнира может функционально взаимодействовать с системой пускового привода и, таким образом, при работе системы пускового привода может выполняться поворот концевого эффектора 300 узла стержня 200. Когда барабан 500 переключателя перемещается между своим первым положением и вторым положением, барабан 500 переключателя перемещается относительно дистального соединительного фланца 601. В различных примерах узел стержня 200 может содержать по меньшей мере один датчик, выполненный с возможностью определения положения барабана переключателя 500. Как показано на ФИГ. 11 и 12, дистальный соединительный фланец 601 может содержать, например, датчик 605 магнитного поля и барабан 500 переключателя может содержать магнитный элемент, например, такой как постоянный магнит 505. Датчик 605 магнитного поля может быть выполнен с возможностью определения положения постоянного магнита 505. Когда барабан 500 переключателя поворачивается между своим первым положением и вторым положением, постоянный магнит 505 может перемещаться относительно датчика 605 магнитного поля. В различных примерах, датчик 605 магнитного поля может обнаруживать изменения в магнитном поле, созданном при перемещении постоянного магнита 505. Датчик 605 магнитного поля может обмениваться сигналами, например, с печатной платой 610 стержня и/или печатной платой 100 рукоятки. На основании сигнала от датчика 605 магнитного поля, микроконтроллер на печатной плате 610 стержня и/или печатной плате 100 рукоятки может определять, находится система привод шарнира в зацеплении с системой пускового привода, или отцеплена от нее.
Как показано на ФИГ. 3 и 7, шасси 240 включает в себя, по меньшей мере, один, а предпочтительно два конических соединительных участка 244, которые выполнены с возможностью размещения внутри соответствующих пазов типа «ласточкин хвост» 702, образованных внутри дистального участка 700 соединительного фланца рамы 20. Каждый паз типа «ласточкин хвост» 702 может быть коническим или, иными словами, в некоторой степени V-образным, для размещения в себе соединительных участков 244. Как дополнительно показано на ФИГ. 3 и 7, ушко крепления стержня 226 образовано на проксимальном конце промежуточного пускового стержня 222. Как дополнительно будет более подробно описано ниже, когда сменный узел 200 стержня соединяется с узлом 14 рукоятки, ушко крепления стержня 226 размещено в ложе для крепления пускового стержня 126, образованное на дистальном конце 125 продольного приводного элемента 120, как показано, например, на ФИГ. 3 и 6.
В различных узлах стержня используется система фиксации 710 для съемного соединения узла вала 200 с корпусом 12 и, в частности, с рамой 20. Как показано на ФИГ. 7, например, по меньшей мере, в одной форме система фиксации 710 содержит в себе элемент блокировки, или блокирующую вилку 712, которая съемно соединена с шасси 240. В показанном примере, например, блокирующая вилка 712 имеет U-образную форму с двумя находящимися на некотором расстоянии ножками 714, направленными вниз. Каждая ножка 714 имеет образованное на ней поворотное ушко 715, которое приспособлено для размещения в соответствующем отверстии 245, образованном на шасси 240. Такая конструкция обеспечивает поворотное крепление блокирующей вилки 712 к шасси 240. Блокирующая вилка 712 может иметь два проксимально выступающих блокирующих ушка 716, которые выполнены с возможностью разъемного зацепления с соответствующими блокирующими углублениями, или канавками, 704, на дистальном соединительном фланце 700 рамы 20. См. ФИГ. 3. В различных формах блокирующая вилка 712 смещается в проксимальном направлении с помощью пружины или смещающего элемента (не показан). Блокирующая вилка 712 приводится в действие кнопкой фиксации 722, которая установлена с возможностью скольжения на узле исполнительного механизма фиксации 720, установленном на шасси 240. Кнопка фиксации 722 может быть смещена в проксимальном направлении относительно блокирующей вилки 712. Как будет более подробно описано ниже, блокирующая вилка 712 может перемещаться в незаблокированное положение с помощью смещения кнопки фиксации в дистальном направлении, что также приводит к повороту блокирующей вилки 712 из удерживающего зацепления с дистальным соединительным фланцем 700 рамы 20. Когда блокирующая вилка 712 находится в удерживающем зацеплении с дистальным соединительным фланцем 700 рамы 20, блокирующие ушки 716 зафиксированы в соответствующих блокирующих углублениях, или канавках, 704, на дистальном соединительном фланце 700.
При использовании сменного узла стержня, который включает в себя концевой эффектор описанного здесь типа, который приспособлен для разрезания и фиксации ткани, а также других типов концевых эффекторов, желательно предотвратить непреднамеренное отсоединение сменного узла стержня от корпуса во время срабатывания концевого эффектора. Например, в процессе применения врач может приводить в действие закрывающий спусковой механизм 32 для захвата и продвижения в требующееся положение целевой ткани. Когда целевая ткань будет расположена в концевом эффекторе 300 в требуемой ориентации, врач может полностью привести в действие закрывающий спусковой механизм 32, чтобы закрыть упор 306 и зажать целевую ткань в положении для разрезания и наложения скоб. В этом случае первая приводная система 30 полностью приведена в действие. После того как целевая ткань будет зажата в концевом эффекторе 300, может оказаться желательным предотвратить непреднамеренное отсоединение сменного узла 200 стержня от корпуса 12. Одна форма системы фиксации 710 выполнена с возможностью предотвращения такого непреднамеренного отсоединения.
Как наиболее подробно показано на ФИГ. 7, блокирующая вилка 712 включает в себя по меньшей мере один, а предпочтительно два блокирующих крюка 718, которые приспособлены для контакта с соответствующими участками блокирующих ушек 256, которые образованы на закрывающем челноке 250. Как показано на ФИГ. 13-15, когда закрывающий челнок 250 находится в неактивированном положении (т. е. первая приводная система 30 не активирована и упор 306 открыт), блокирующая вилка 712 может поворачиваться в дистальном направлении для разблокирования сменного узла 200 стержня из корпуса 12. В этом положении блокирующие крюки 718 не контактируют с участками блокирующих ушек 256 на закрывающем челноке 250. Однако когда закрывающий челнок 250 перемещается в активированное положение (т. е. первая приводная система 30 активирована и упор 306 находится в закрытом положении), блокирующая вилка 712 не может поворачиваться в незаблокированное положение. См. ФИГ. 16-18. Иными словами, если врач попытается повернуть блокирующую вилку 712 в незаблокированное положение или, например, блокирующая вилка 712 будет случайно ударена и задета способом, который может привести к ее дистальному повороту, блокирующие крюки 718 на блокирующей вилке 712 войдут в контакт с участками блокирующих ушек 256 на закрывающем челноке 250 и предотвратят перемещение блокирующей вилки 712 в незаблокированное положение.
Прикрепление сменного узла 200 стержня к узлу 14 рукоятки будет описано со ссылкой на ФИГ. 3. Чтобы начать процесс соединения, врач может расположить шасси 240 сменного узла стержня 200 поверх дистального соединительного фланца 700 рамы 20 или смежно с ним так, чтобы конические соединительные участки 244, образованные на шасси 240, были совмещены с соответствующими пазами типа «ласточкин хвост» 702 на раме 20. Затем врач может переместить узел 200 стержня вдоль оси установки IA, которая перпендикулярна оси стержня SA-SA, чтобы установить соединительные участки 244 в функциональное зацепление с соответствующими размещающими пазами типа «ласточкин хвост» 702. Таким образом, ушко крепления стержня 226 на промежуточном пусковом стержне 222 также будет установлено в ложе 126 в выполненный с возможностью продольного перемещения приводной элемент 120, а участки штифта 37 на втором закрывающем звене 38 будут установлены в соответствующие крюки 252 на закрывающей вилке 250. При использовании в настоящем документе термин «функциональное зацепление» применительно к двум компонентам означает, что два компонента находятся в достаточном зацеплении друг с другом так, что после приложения к ним активирующего движения компоненты могут выполнять назначенное действие, функцию и/или процедуру.
Как описано выше, по меньшей мере, пять систем сменных узлов 200 стержня могут быть функционально соединены, по меньшей мере, с пятью соответствующими системами узла 14 рукоятки. Первая система может содержать систему рамы, которая соединяет и/или совмещает раму или цапфу узла 200 стержня с рамой 20 узла 14 рукоятки. Другая система может содержать систему закрывающего привода 30, которая может функционально соединять закрывающий спусковой механизм 32 узла 14 рукоятки и закрывающую трубку 260 с упором 306 узла 200 стержня. Как кратко описано выше, скоба для крепления закрывающей трубки 250 узла стержня 200 может зацепляться со штифтом 37 второго закрывающего звена 38. Другая система может содержать систему 80 пускового привода, которая может функционально соединять пусковой крючок 130 узла 14 рукоятки с промежуточным пусковым стержнем 222 узла 200 стержня.
Как кратко описано выше, ушко крепления стержня 226 может быть функционально соединено с ложем 126 продольного приводного элемента 120. Другая система может содержать электрическую систему, которая может подавать сигнал контроллеру в узле 14 рукоятки, такому как микроконтроллер, о том, что, например, узел стержня, такой как узел 200 стержня, функционально зацепляется с узлом 14 рукоятки, и/или, во-вторых, подавать питание и/или сигналы связи между узлом 200 стержня и узлом 14 рукоятки. Например, узел стержня 200 может включать в себя электрический соединитель 1410, который функционально установлен на печатной плате 610 стержня. Электрический соединитель 1410 выполнен с возможностью парного зацепления с соответствующим электрическим соединителем 1400 на плате управления рукояткой 100. Более подробная информация, касающаяся электронных схем и систем управления, приведена в заявке на патент США № 13/803,086 и в настоящее время публикации заявки на патент США № 2014/0263541, полное описание которой было ранее включено в настоящий документ путем ссылки. Пятая система может состоять из системы фиксации для разъемной блокировки узла 200 стержня на узле 14 рукоятки.
Как также показано на ФИГ. 2 и 3, узел 14 рукоятки может содержать электрический соединитель 1400, содержащий множество электрических контактов. Как показано на ФИГ. 19, электрический разъем 1400, например, может содержать первый контакт 1401a, второй контакт 1401b, третий контакт 1401c, четвертый контакт 1401d, пятый контакт 1401e и шестой контакт 1401f. Несмотря на то что в показанном примере используются шесть контактов, предусмотрены другие примеры, в которых могут использоваться более шести контактов или менее шести контактов.
Как показано на ФИГ. 19, первый контакт 1401a может находиться в электрической связи с транзистором 1408, контакты 1401b-1401e могут находиться в электрической связи с микроконтроллером 1500, а шестой контакт 1401f может находиться в электрической связи с землей. В некоторых обстоятельствах один или более электрических контактов 1401b-1401e могут находиться в электрической связи с одним или более выходными каналами микроконтроллера 1500, и на них может подаваться питание или к ним может прилагаться потенциал, когда узел 14 рукоятки находится в состоянии с электропитанием. В некоторых обстоятельствах один или более электрических контактов 1401b-1401e могут находиться в электрической связи с одним или более входными каналами микроконтроллера 1500, и когда узел 14 рукоятки находится в состоянии с электропитанием, микроконтроллер 1500 может быть выполнен с возможностью обнаруживать приложение потенциала к таким электрическим контактам. Когда узел стержня, например, такой как узел стержня 200, собирается с узлом 14 рукоятки, электрические контакты 1401a-1401f могут быть не связаны друг с другом. Однако когда узел стержня не собран с узлом 14 рукоятки, электрические контакты 1401a-1401f электрического разъема 1400 могут быть открыты, и в некоторых обстоятельствах один или более контактов 1401a-1401f могут случайно войти в электрическое соединение друг с другом. Такие ситуации могут быть возможны, например, когда один или более контактов 1401a-1401f входят в контакт с электропроводным материалом. В этом случае, в частности, микроконтроллер 1500, может получить ошибочный входной сигнал, и/или узел стержня 200 может получить ошибочный выходной сигнал. Для решения этой проблемы в различных обстоятельствах узел 14 рукоятки может быть отключен от питания, когда узел стержня, например, такой как узел 200 стержня, не прикреплен к узлу 14 рукоятки.
В других обстоятельствах узел 14 рукоятки может быть подключен к питанию, когда узел стержня, например, такой как узел 200 стержня, не прикреплен к ней. В таких обстоятельствах микроконтроллер 1500 может быть выполнен с возможностью игнорировать входные сигналы или потенциалы, приложенные к контактам, находящимся в электрической связи с микроконтроллером 1500, т. е. контактам 1401b-1401e, например, до тех пор, пока узел стержня не будет прикреплен к узлу 14 рукоятки. Хотя в таких обстоятельствах на микроконтроллер 1500 может подаваться питание для работы других функций узел 14 рукоятки, узел 14 рукоятки может находиться в состоянии с отключенным питанием. В некотором смысле электрический разъем 1400 может находиться в состоянии с отключенным питанием, так как потенциалы, приложенные к электрическим контактам 1401b-1401e, не могут влиять на работу узла 14 рукоятки. Читателю будет понятно, что хотя контакты 1401b-1401e могут находиться в состоянии с отключенным питанием, электрические контакты 1401a и 1401f, которые не находятся в электрической связи с микроконтроллером 1500, могут находиться или могут не находиться в состоянии с отключенным питанием. Например, шестой контакт 1401f может оставаться в электрической связи с землей независимо от того, находится ли узел 14 рукоятки в состоянии с включенным или с отключенным питанием.
Более того, транзистор 1408 и/или любая другая подходящая конфигурация транзисторов, например, такая как транзистор 1410, и/или переключателей может быть выполнена с возможностью управлять подачей питания от источника питания 1404, например, такого как батарея 90 внутри узла 14 рукоятки, к первому электрическому контакту 1401a, независимо от того, находится ли узел 14 рукоятки в состоянии со включенным или отключенным питанием. В различных обстоятельствах узел 200 стержня, например, может быть выполнен с возможностью изменять состояние транзистора 1408, когда узел 200 стержня зацепляется с узлом 14 рукоятки. В некоторых обстоятельствах, в дополнение к указанному ниже, датчик 1402 магнитного поля может быть выполнен с возможностью переключать состояние транзистора 1410, который в результате может переключать состояние транзистора 1408 и, в конечном итоге, подавать питание от источника питания 1404 на первый контакт 1401a. Таким образом, как цепи питания, так и сигнальные цепи разъема 1400, могут быть обесточены, когда узел стержня не установлен в узел 14 рукоятки, и могут получать питание, когда узел стержня установлен в узел 14 рукоятки.
В различных обстоятельствах, как показано на ФИГ. 19, узел 14 рукоятки может включать в себя, например, датчик 1402 магнитного поля, который может быть выполнен с возможностью обнаруживать обнаружимый элемент, например, такой как магнитный элемент 1407 (ФИГ. 3), на узле стержня, например, таком как узел стержня 200, когда узел стержня соединен с узлом 14 рукоятки. Датчик 1402 магнитного поля может получать питание от источника питания 1406, например, такого как батарея, которое в результате может усиливать сигнал обнаружения от датчика 1402 магнитного поля и связываться с входным каналом микроконтроллера 1500 через цепь, показанную на ФИГ. 19. После того как микроконтроллер 1500 получил входной сигнал, указывающий на то, что узел стержня был по меньшей мере частично соединен с узлом 14 рукоятки, и что в результате этого электрические контакты 1401a-1401f более не открыты, микроконтроллер 1500 может войти в его нормальное рабочее состояние с питанием. В таком рабочем состоянии микроконтроллер 1500 будет оценивать сигналы, передаваемые на один или более контактов 1401b-1401e от узла стержня, и/или передавать сигналы к узлу стержня через один или более контактов 1401b-1401e в процессе его обычного применения. В различных обстоятельствах может потребоваться, чтобы узел стержня 200 был полностью установлен, прежде чем датчик 1402 магнитного поля сможет обнаружить магнитный элемент 1407. Несмотря на то что датчик 1402 магнитного поля можно использовать для обнаружения наличия узла 200 стержня, для обнаружения того, был ли узел стержня собран с узлом 14 рукоятки, можно использовать любую подходящую систему датчиков и/или переключателей. Таким образом, в дополнение к указанному выше, как цепи питания, так и сигнальные цепи разъема 1400, могут быть обесточены, когда узел стержня не установлен в узле 14 рукоятки, и могут получать питание, когда узел стержня установлен в узел 14 рукоятки.
В различных примерах, в контексте настоящего изобретения, например, может использоваться любой подходящий датчик магнитного поля для определения того, был собран узел стержня с узлом 14 рукоятки. Например, технологии, применяемые для обнаружения магнитного поля, включают в себя, помимо прочего, датчик Холла, индукционную катушку, магнитный датчик с оптической накачкой, ядерную прецессию, сверхпроводящий магнитометр (SQUID), эффект Холла, анизотропное магнитосопротивление, гигантское магнитосопротивление, магнитные туннельные переходы, гигантский магнитоимпеданс, магнитострикционные/пьезоэлектрические композиты, магнитодиод, магнитотранзистор, оптоволокно, магнитооптические датчики и магнитные датчики на основании микроэлектромеханических систем.
Как показано на ФИГ. 19, микроконтроллер 1500 в целом микропроцессор («процессор») и один или более блоков памяти, функционально соединенных с процессором. Путем исполнения кодовой инструкции, которая хранится в памяти, процессор может управлять различными компонентами хирургического инструмента, например, такими как двигатель, различные приводные системы и/или пользовательский дисплей. Микроконтроллер 1500 может быть реализован с применением интегрированных и/или отдельных аппаратных элементов, программных элементов и/или их комбинации. Примеры интегрированных аппаратных элементов могут включать в себя процессоры, микропроцессоры, микроконтроллеры, интегральные схемы, специализированные интегральные схемы (СИС), программируемые логические устройства (ПЛУ), процессоры для обработки цифровых сигналов (DSP), программируемые пользователем вентильные матрицы (ППВМ), логические вентили, регистры, полупроводниковые устройства, кристаллы, микрокристаллы, наборы кристаллов, микроконтроллер, система на кристалле (SoC) и/или система в пакете (SIP). Примеры отдельных аппаратных элементов могут включать в себя схемы и/или элементы схемы, например, логические вентили, полевые транзисторы, биполярные транзисторы, резисторы, конденсаторы, индукционные катушки и/или реле. В некоторых примерах микроконтроллер 1500 может включать в себя гибридную схему, содержащую, например, отдельные или интегрированные элементы схемы или компоненты на одной или более подложках.
Как показано на ФИГ. 19, микроконтроллер 1500 может представлять собой, например, LM 4F230H5QR производства компании Texas Instruments. В некоторых примерах Texas Instruments LM4F230H5QR представляет собой процессорное ядро ARM Cortex-M4F, содержащее однотактную флеш-память на кристалле объемом 256 Кб или другую энергонезависимую память с частотой максимум 40 МГц, буфер предвыборки для повышения производительности выше 40 МГц, однотактную последовательную память с произвольным доступом (SRAM) объемом 32 Кб, внутреннее постоянное запоминающее устройство (ПЗУ) с загруженным программным обеспечением StellarisWare®, электрически стираемую программируемую постоянную память (ЭСППЗУ) объемом 2 Кб, один или более модулей широтно-импульсной модуляции (ШИМ), один или более аналогов импульсных датчиков положения (QEI), один или более 12-битных аналогово-цифровых преобразователей (АЦП) с 12 аналоговыми входными каналами, помимо других элементов, которые находятся в доступе. В настоящем изобретении в качестве замены могут применяться другие микроконтроллеры. Соответственно, настоящее описание не должно быть ограничено в этом контексте.
Как описано выше, узел 14 рукоятки и/или узел 200 стержня может включать системы и конфигурации, предназначенные для предотвращения или, по меньшей мере, снижения вероятности короткого замыкания контактов электрического соединителя 1400 рукоятки и/или контактов электрического соединителя 1410 стержня, когда узел 200 стержня не собран, или полностью собран, с узлом 14 рукоятки. Как показано на ФИГ. 3, электрический соединитель 1400 рукоятки может быть по меньшей мере частично утоплен в полости 1409, образованной в раме 20 рукоятки. Шесть контактов 1401a-1401f электрического соединителя 1400 могут быть полностью утоплены в полости 1409. Такие варианты расположения могут снижать вероятность случайного контакта с объектом одного или более контактов 1401a-1401f. Аналогично, электрический соединитель 1410 стержня может быть расположен в углублении, образованном в шасси 240 стержня, что может снижать вероятность случайного контакта с объектом одного или более контактов 1411a-1411f электрического соединителя 1410 стержня. Как показано на конкретном примере по ФИГ. 3, контакты 1411a-1411f стержня могут представлять собой штыревые контакты. По меньшей мере в одном примере, каждый контакт 1411a-1411f стержня может содержать гибкий выступ, проходящий из него, который может быть выполнен с возможностью зацепления, например, с соответствующим контактом 1401a-1401f рукоятки. Контакты 1401a-1401f рукоятки могут представлять собой гнездовые контакты. По меньшей мере в одном примере, каждый контакт рукоятки 1401a-1401f может содержать плоскую поверхность, например, об которую штыревые контакты 1401a-1401f стержня могут тереться, или по которой они могут скользить, для поддержания электропроводящей поверхности раздела между ними. В различных примерах направление, в котором узел 200 стержня собирают с узлом 14 рукоятки, может быть параллельным или, по меньшей мере, по существу параллельным контактам 1401a-1401f рукоятки, вследствие чего контакты 1411a-1411f стержня скользят по контактам 1401a-1401f рукоятки, когда узел 200 стержня собран с узлом 14 рукоятки. В различных альтернативных примерах контакты 1401a-1401f рукоятки могут представлять собой штыревые контакты и контакты 1411a-1411f стержня могут представлять собой гнездовые контакты. В определенных альтернативных примерах, контакты 1401a-1401f рукоятки и контакты 1411a-1411f стержня могут характеризоваться любым подходящим расположением.
В различных примерах узел 14 рукоятки может содержать защитный элемент соединителя, выполненный с возможностью, по меньшей мере, частично закрывать электрический соединитель 1400 рукоятки, и/или защитный элемент соединителя выполнен с возможностью, по меньшей мере, частично закрывать электрический соединитель 1410 стержня. Защитный элемент соединителя может предотвращать или по меньшей мере снижать вероятность случайного касания объектом контактов электрического соединителя, когда узел стержня не собран с рукояткой, или только частично собран с ней. Защитный элемент соединителя может быть подвижным. Например, защитный элемент соединителя может быть перемещен между закрытым положением, в котором он по меньшей мере частично защищает соединитель, и открытым положением, в котором он не защищает соединитель, или по меньшей мере защищает меньшую его часть. По меньшей мере в одном примере защитный элемент соединителя можно сместить при сборке узла стержня с рукояткой. Например, если рукоятка содержит a защитный элемент соединителя рукоятки, узел стержня может контактировать и смещать защитный элемент соединителя рукоятки при сборке узла стержня с рукояткой. Аналогично, если узел стержня содержит защитный элемент соединителя стержня, рукоятка может контактировать и смещать защитный элемент соединителя стержня при сборке узла стержня с рукояткой. В различных примерах защитный элемент соединителя может содержать, например, дверцу. По меньшей мере в одном примере дверца может иметь скошенную поверхность, которая, при контакте с рукояткой или стержнем, может способствовать смещению дверцы в определенном направлении. В различных примерах защитный элемент соединителя, например, можно приводит в поступательное перемещение и/или вращение. В некоторых примерах защитный элемент соединителя может содержать по меньшей мере одну пленку, которая закрывает контакты электрического соединителя. Когда узел стержня собран с рукояткой, пленка может порваться. По меньшей мере в одном примере штыревые контакты соединителя могут проникнуть в пленку перед тем, как войти в зацепление с соответствующими контактами, расположенными под пленкой.
Как описано выше, хирургический инструмент может содержать систему, которая может избирательно включать, или активировать, контакты электрического соединителя, такого как, например, электрический соединитель 1400. В различных примерах, контакты могут быть переведены между неактивированным состоянием и активированным состоянием. В некоторых примерах контакты могут быть переведены между отслеживаемым состоянием, деактивированным состоянием и активированным состоянием. Например, микроконтроллер 1500, например, может отслеживать контакты 1401a-1401f, когда узел стержня не был собран с узлом 14 рукоятки для определения того, не было ли короткого замыкания одного или более контактов 1401a-1401f. Микроконтроллер 1500 может быть выполнен с возможностью подачи низкого потенциала напряжения на каждый из контактов 1401a-1401f и оценки, присутствует ли только минимальное сопротивление на каждом из контактов. Такое рабочее состояние может предусматривать отслеживаемое состояние. В случае, если определенное сопротивление на контакте является высоким, или оно выше порогового сопротивления, микроконтроллер 1500 может деактивировать этот контакт, несколько контактов, или, альтернативно, все контакты. Такое рабочее состояние может предусматривать деактивированное состояние. Если узел стержня собран с узлом 14 рукоятки и это определено микроконтроллером 1500, как описано выше, микроконтроллер 1500 может повышать потенциал напряжения, который подается на контакты 1401a-1401f. Такое рабочее состояние может предусматривать активированное состояние.
В различных узлах стержня, описанных в настоящем документе, могут использоваться датчики и различные другие компоненты, которые требуют наличия электрической связи с контроллером в корпусе. Эти узлы стержня обычно выполнены с возможностью вращения относительно корпуса, что делает неизбежным наличие соединения, которое упрощает такую электрическую связь между двумя или более компонентами, которые могут вращаться друг относительно друга. При использовании концевых эффекторов типов, описанных в настоящем документе, конструкции соединителей должны быть относительно прочными, но при этом также компактным для установки в часть для соединителя узла стержня.
На ФИГ. 20 изображена неограничивающая форма концевого эффектора 300. Как описано выше, концевой эффектор 300 может содержать упор 306 и кассету 304 со скобами. В данном не имеющем ограничительного характера примере упор 306 соединен с удлиненным каналом 198. Например, в удлиненном канале 198 могут быть образованы отверстия 199 с возможностью размещения штифтов 152, проходящих от упора 306, и обеспечивающих поворот упора 306 из открытого положения в закрытое положение относительно удлиненного канала 198 и кассеты со скобами 304. Кроме того, на ФИГ. 20 показан пусковой стержень 172, выполненный с возможностью продольного поступательного перемещения в концевой эффектор 300. Пусковой стержень 172 может быть изготовлен из одной сплошной секции или, в различных примерах, может включать в себя многослойный материал, содержащий, например, комплект стальных пластин. Дистально выступающий конец пускового стержня 172 может быть прикреплен к трехрогому элементу 178, который, помимо прочего, способен обеспечивать пространственное разнесение упора 306 и кассеты со скобами 304, расположенной в удлиненном канале 198, когда упор 306 находится в закрытом положении. Трехрогий элемент 178 также может включать в себя заостренный режущий край 182, который может применяться для рассечения ткани по мере продвижения трехрогого элемента 178 дистально пусковым стержнем 172. При эксплуатации трехрогий элемент 178 также может активировать, или приводить в действие, кассеты со скобами 304. Кассета со скобами 304 может включать в себя формованный корпус кассеты 194, который удерживает множество скоб 191, уложенных на выталкиватели скоб 192 внутри соответствующих открытых вверх полостей для скоб 195. Трехрогий элемент 178 дистально приводит в действие клиновидные салазки 190, которые скользят по лотку кассеты 196, удерживающему вместе различные компоненты сменной кассеты со скобами 304. Клиновидные салазки 190 поднимают вверх выталкиватели скоб 192 в деформирующий контакт с упором 306 для выталкивания скоб 191, в то время как режущая поверхность 182 трехрогого элемента 178 рассекает зажатую ткань.
В дополнение к указанному выше, трехрогий элемент 178 может включать в себя верхние штифты 180, которые зацепляют упор 306 во время пуска. Трехрогий элемент 178 дополнительно может включать в себя средние штифты 184 и пятку 186, которые могут зацеплять различные части корпуса кассеты 194, лотка кассеты 196 и удлиненного канала 198. Когда кассета со скобами 304 расположена внутри удлиненного канала 198, паз 193, образованный в корпусе кассеты 194, может быть совмещен с пазом 197, образованным в лотке кассеты 196, и пазом 189, образованным в удлиненном канале 198. В процессе применения трехрогий элемент 178 может скользить по совмещенным пазам 193, 197 и 189, причем, как показано на ФИГ. 20, пятка 186 трехрогого элемента 178 может зацеплять канавку, проходящую вдоль нижней поверхности канала 198 по длине паза 189, средние штифты 184 могут зацеплять верхние поверхности лотка кассеты 196 по длине продольного паза 197, а верхние штифты 180 могут зацеплять упор 306. В таких обстоятельствах трехрогий элемент 178 может пространственно отделять или ограничивать относительное перемещение между упором 306 и кассетой со скобами 304 по мере дистального перемещения пускового стержня 172 для приведения в действие скоб из кассеты со скобами 304 и/или рассечения ткани, захваченной между упором 306 и кассетой со скобами 304. После этого пусковой стержень 172 и трехрогий элемент 178 можно оттянуть проксимально, что позволяет упору 306 открыться, чтобы высвободить две сшитые скобами и рассеченные части ткани (не показаны).
После общего описания хирургического инструмента 10 (ФИГ. 1-4), далее приводится подробное описание различных электрических/электронных компонентов хирургического инструмента 10. На ФИГ. 21A-21B изображен один пример сегментированной цепи 2000, содержащей множество сегментов 2002a-2002g. Сегментированная цепь 2000, содержащая множество сегментов 2002a-2002g цепи, выполнена с возможностью управления хирургическим инструментом с электроприводом, таким как, например, хирургический инструмент 10, изображенный на ФИГ. 1-18A, без ограничения. Множество сегментов 2002a-2002g цепи выполнены с возможностью управления одной или более операциями хирургического инструмента 10 с электроприводом. Сегмент 2002a процессора обеспечения безопасности (сегмент 1) содержит процессор 2004 обеспечения безопасности. Сегмент 2002b главного процессора (сегмент 2) содержит главный или основной процессор 2006. Процессор 2004 обеспечения безопасности и/или главный процессор 2006 выполнены с возможностью взаимодействия с одним или более дополнительными сегментами 2002c-2002g цепи для управления работой хирургического инструмента 10 с электроприводом. Главный процессор 2006 содержит множество вводов, соединенных, например, с одним или более сегментами 2002c-2002g цепи, батареей 2008 и/или множеством переключателей 2056-2070. Сегментированная цепь 2000 может быть реализована в виде любой подходящей цепи, такой как, например, блок печатных плат (PCBA) в хирургическом инструменте 10 с электроприводом. Следует понимать, что термин «процессор» в контексте настоящего документа включает любой микропроцессор, микроконтроллер или другое базовое вычислительное устройство, которое имеет функции центрального процессора (ЦП) компьютера на интегральной схеме или не более, чем на нескольких интегральных схемах. Процессор представляет собой многозадачное программируемое устройство, которое принимает цифровые данные в качестве входных данных, обрабатывает их в соответствии с командами, хранящимися в памяти, и выдает результат в виде выходных данных. Он представляет собой пример последовательной цифровой логики, поскольку имеет внутреннюю память. Процессоры выполняют операции над числами и символами, имеющимися в двоичной системе исчисления.
В одном аспекте основной процессор 2006 может представлять собой любой одноядерный или многоядерный процессор, такой как известный под торговым названием ARM Cortex от Texas Instruments. В одном примере процессор 2004 обеспечения безопасности может представлять собой микроконтроллерную платформу обеспечения безопасности, содержащую два семейства микроконтроллеров, таких как TMS570 и RM4x, известные под торговым названием Hercules ARM Cortex R4, также от Texas Instruments. Тем не менее, могут использоваться другие подходящие эквиваленты микроконтроллеров и процессоров обеспечения безопасности, без ограничения. В одном примере процессор 2004 обеспечения безопасности может быть специально разработан под приложения с особыми требованиями по безопасности IEC 61508 и ISO 26262, среди прочего, для обеспечения усовершенствованных интегрированных функций обеспечения безопасности, при этом обеспечивая настраиваемые технические характеристики, возможность подключения и хранения данных.
В некоторых примерах основной процессор 2006 может представлять собой, например, LM 4F230H5QR производства компании Texas Instruments. По меньшей мере в одном примере Texas Instruments LM4F230H5QR представляет собой процессорное ядро ARM Cortex-M4F, содержащее однотактную флеш-память на кристалле объемом 256 Кб или другую энергонезависимую память с частотой максимум 40 МГц, буфер предвыборки для повышения производительности выше 40 МГц, однотактную SRAM объемом 32 Кб, внутреннее ПЗУ с загруженным программным обеспечением StellarisWare®, ЭСППЗУ объемом 2 Кб, один или более модулей ШИМ, один или более аналогов QEI, один или более 12-битных АЦП с 12 аналоговыми входными каналами, помимо других элементов, информацию о которых можно получить из паспорта изделия. В качестве замены могут использоваться другие процессоры и, соответственно, настоящее описание не должно быть ограничено в этом контексте.
В одном аспекте сегментированная цепь 2000 содержит сегмент 2002c ускорения (сегмент 3). Сегмент 2002c ускорения содержит датчик 2022 ускорения. Датчик 2022 ускорения может представлять собой, например, акселерометр. Датчик 2022 ускорения выполнен с возможностью определения движения или ускорения хирургического инструмента 10 с электроприводом. В некоторых примерах входные данные от датчика 2022 ускорения используются, например, для перехода в спящий режим или из него, определения ориентации хирургического инструмента с электроприводом и/или определения того, когда хирургический инструмент был сброшен. В некоторых примерах сегмент 2002c ускорения соединен с процессором 2004 обеспечения безопасности и/или главным процессором 2006.
В некоторых аспектах сегментированная цепь 2000 содержит сегмент 2002d дисплея (сегмент 4). В соответствии с различными вариантами осуществления сегмент 2002d дисплея содержит соединитель дисплея (не показан), который соединен с главным процессором 2006, одну или более интегральных схем драйвера дисплея (не показаны), которые соединены с соединителем дисплея, и дисплей 2028, который соединен с одной или более интегральными схемами драйвера дисплея. Соединитель дисплея и одна или более интегральных схем драйвера дисплея показаны, например, на ФИГ. 4B в заявке на патент США № 14/226,076, содержание которой полностью включено в настоящий документ с помощью ссылки. Интегральные схемы драйвера дисплея могут быть встроены в дисплей 2028 и/или могут быть расположены отдельно от дисплея 2028. Дисплей 2028 может представлять собой любой подходящий дисплей, такой как, например, дисплей на основании органических светодиодов (OLED), жидкокристаллический дисплей (ЖКД) и/или любой другой подходящий дисплей. В некоторых примерах сегмент 2002d дисплея соединен с процессором 2004 обеспечения безопасности.
В некоторых аспектах сегментированная цепь 2000 содержит сегмент 2002e стержня (сегмент 5). Сегмент 2002e стержня содержит одно или более средств управления узлом стержня (например, узлом 200 стержня), соединенных с хирургическим инструментом 10, и/или одно или более средств управления концевым эффектором (например, концевым эффектором 300), соединенных со стержнем 200. В соответствии с различными вариантами осуществления сегмент 2002e стержня содержит соединитель 2030 стержня и блок печатных плат (PCBA) 2031 стержня. Соединитель 2030 стержня выполнен с возможностью обеспечения связи PCBA 2031 стержня с главным процессором 2006. В соответствии с различными вариантами осуществления PCBA 2031 стержня содержит первый переключатель шарнирного соединения (не показан), второй переключатель шарнирного соединения (не показан) и ЭСППЗУ PCBA стержня (не показано). В некоторых примерах ЭСППЗУ PCBA стержня имеет один или более параметров, режимов и/или программ, характерных для узла 200 стержня и/или PCBA 2031 стержня. PCBA 2031 стержня может быть соединен с узлом 200 стержня и/или выполнен как одно целое с хирургическим инструментом 10. В некоторых примерах сегмент 2002e стержня содержит второе ЭСППЗУ стержня (не показано). Второе ЭСППЗУ стержня имеет множество алгоритмов, режимов, параметров и/или других данных, соответствующих одному или более узлам 200 стержня и/или концевым эффекторам 300, которые могут взаимодействовать с хирургическим инструментом 10 с электроприводом. Первый переключатель шарнирного соединения, второй переключатель шарнирного соединения и ЭСППЗУ PCBA стержня показаны, например, на ФИГ. 4A в заявке на патент США № 14/226,076, содержание которой полностью включено в настоящий документ с помощью ссылки. В соответствии с другими вариантами осуществления, как показано на ФИГ. 21A, сегмент 2002e стержня содержит PCBA 2031 стержня, датчик 2070 Холла и соединитель 2025 стержня. PCBA стержня 2031 содержит микропроцессор с низким энергопотреблением 2090 с технологией ферроэлектрического произвольного доступа (FRAM), механический переключатель шарнирного соединения 2092, переключатель разблокировки стержня на основании эффекта Холла 2094 и флеш-память 2034. Датчик 2070 Холла используется для указания зацепления узла 200 стержня и, таким образом, может рассматриваться как датчик зацепления стержня.
В некоторых аспектах сегментированная цепь 2000 содержит сегмент 2002f кодового датчика положения (сегмент 6). Сегмент 2002f кодового датчика положения содержит один или более магнитных кодовых датчиков 2040a-2040b углового положения. Один или более магнитных кодовых датчиков 2040a-2040b углового положения выполнены с возможностью определения углового положения двигателя 2048, узла 200 стержня и/или концевого эффектора 300 хирургического инструмента 10. В некоторых примерах магнитные кодовые датчики 2040a-2040b углового положения могут быть соединены с процессором 2004 обеспечения безопасности и/или главным процессором 2006.
В некоторых аспектах сегментированная цепь 2000 содержит сегмент 2002g двигателя (сегмент 7). Сегмент 2002g двигателя содержит двигатель 2048, такой как, например, щеточный двигатель постоянного тока, выполненныйс возможностью управления одним или более движениями хирургического инструмента 10 с электроприводом. Двигатель 2048 соединен с главным процессором 2006 посредством контроллера 2043 двигателя, множества приводов 2042 с мостовой схемой управления и множества полевых транзисторов с мостовой схемой управления (не показаны). В соответствии с различными вариантами осуществления полевые транзисторы (FET) с мостовой схемой управления соединены с процессором 2004 обеспечения безопасности. FET с мостовой схемой управления показаны, например, на ФИГ. 4B в заявке на патент США № 14/226,076, содержание которой полностью включено в настоящий документ с помощью ссылки. Контроллер 2043 двигателя управляет первым флажковым указателем 2074a двигателя и вторым флажковым указателем 2074b двигателя для указания состояния и положения двигателя 2048 главному процессору 2006. Главный процессор 2006 подает высокий сигнал 2076a широтно-импульсной модуляции (ШИМ), низкий сигнал 2076b ШИМ, сигнал 2078 направления, сигнал 2080 синхронизации и сигнал 2082 сброса двигателя на контроллер 2043 двигателя через буфер 2084. Датчик 2046 тока двигателя последовательно соединен с двигателем 2048 для измерения потребления тока двигателя 2048. Датчик 2046 тока двигателя обменивается сигналами с главным процессором 2006 и/или процессором 2004 обеспечения безопасности. В некоторых примерах двигатель 2048 соединен с фильтром подавления электромагнитных помех (EMI) двигателя (не показан). Фильтр EMI показан, например, на ФИГ. 3B в заявке на патент США № 14/226,076, содержание которой полностью включено в настоящий документ с помощью ссылки.
В некоторых аспектах сегментированная цепь 2000 содержит сегмент 2002h питания (сегмент 8), выполненный с возможностью подачи сегмента напряжения на каждый из сегментов 1102a-1102g цепи. Батарея 2008 соединена с процессором 2004 обеспечения безопасности, главным процессором 2006 и одним или более дополнительными сегментами 2002c-2002g цепи. Батарея 2008 соединена с сегментированной цепью 2000 посредством соединителя 2010 батареи и датчика 2012 тока. Датчик 2012 тока выполнен с возможностью измерения общего потребления тока сегментированной цепи 2000. В некоторых примерах один или более преобразователей 2014a, 2014b, 2016 напряжения выполнены с возможностью подачи заданных величин напряжения на один или более сегментов 2002a-2002g цепи. Например, в некоторых примерах сегментированная цепь 2000 может содержать преобразователи 2014a-2014b напряжения на 3,3 В и/или преобразователи 2016 напряжения на 5 В. Повышающий преобразователь 2018 выполнен с возможностью обеспечения повышения напряжения до заданной величины, такой как, например, до 13 В. Повышающий преобразователь 2018 выполнен с возможностью подачи дополнительного напряжения и/или тока во время энергоемких операций и предотвращения понижения напряжения или снижения энергопотребления. Транзисторный переключатель (например, n-канальный MOSFET) 2015 соединен с преобразователями 2014B, 2016 мощности.
В некоторых аспектах сегмент 2002a обеспечения безопасности содержит выключатель 2020 питания двигателя. Выключатель 2020 питания двигателя подключен между сегментом 2002h питания и сегментом 2002g двигателя. Транзисторный переключатель (например, n-канальный MOSFET) 2057 соединен с выключателем 2020 питания двигателя. Сегмент 2002a обеспечения безопасности выполнен с возможностью прекращения подачи питания на сегмент 2002g двигателя, когда процессор 2004 обеспечения безопасности и/или главный процессор 2006 определяет сбой или отказ, что описано подробно в настоящем документе. Хотя сегменты 2002a-2002g цепи изображены так, что все компоненты сегментов 2002a-2002h цепи расположены физически близко друг к другу, специалисту в области техники будет понятно, что сегмент 2002a-2002h цепи может содержать компоненты, которые находятся физически и/или электрически отдельно от других компонентов того же сегмента 2002a-2002g цепи. В некоторых примерах один или более компонентов могут быть общими для двух или более сегментов 2002a-2002g цепи.
В некоторых аспектах множество переключателей 2056-2070 соединены с процессором 2004 обеспечения безопасности и/или главным процессором 2006. Множество переключателей 2056-2070 могут быть выполнены с возможностью управления одной или более операциями хирургического инструмента 10, управления одной или более операциями сегментированной цепи 2000, и/или указания состояния хирургического инструмента 10. Например, переключатель 2056 аварийной дверцы выполнен с возможностью указания состояния аварийной дверцы. Множество переключателей шарнирного соединения, такие как, например, левый переключатель 2058a левого шарнирного соединения, правый переключатель 2060a левого шарнирного соединения, центральный переключатель 2062a левого шарнирного соединения, левый переключатель 2058b правого шарнирного соединения, правый переключатель 2060b правого шарнирного соединения центральный переключатель 2062b правого шарнирного соединения выполнены с возможностью управления шарнирным соединением узла 200 стержня и/или концевого эффектора 300. Левый реверсирующий переключатель 2064a и правый реверсирующий переключатель 2064b соединены с главным процессором 2006. В некоторых примерах левые переключатели, включая левый переключатель 2058a левого шарнирного соединения, правый переключатель 2060a левого шарнирного соединения, центральный переключатель 2062a левого шарнирного соединения и левый реверсирующий переключатель 2064a, соединены с главным процессором 2006 посредством левого изогнутого соединителя (не показан). Правые переключатели, включая левый переключатель 2058b правого шарнирного соединения, правый переключатель 2060b правого шарнирного соединения, центральный переключатель 2062b правого шарнирного соединения и правый реверсирующий переключатель 2064b, соединены с главным процессором 2006 посредством правого изогнутого соединителя (не показан). Левый изогнутый соединитель и правый изогнутый соединитель показаны, например, на ФИГ. 3A в заявке на патент США № 14/226,076, содержание которой полностью включено в настоящий документ с помощью ссылки. В некоторых примерах пусковой переключатель 2066, переключатель 2068 размыкания зажима и датчик Холла/датчик 2070 зацепления стержня соединены с главным процессором 2006.
В некоторых аспектах множество переключателей 2056-2070 могут содержать, например, множество средств управления рукояткой, установленных в рукоятке хирургического инструмента 10, множество переключателей индикатора, и/или любую их комбинацию. В различных примерах множество переключателей 2056-2070 позволяют хирургу совершать манипуляции хирургическим инструментом, обеспечивать обратную связь для сегментированной цепи 2000 в отношении положения и/или работы хирургического инструмента и/или указывать небезопасную операцию хирургического инструмента 10. В некоторых примерах большее или меньшее количество переключателей может быть соединено с сегментированной цепью 2000, причем один или более переключателей 2056-2070 могут быть объединены в один переключатель и/или выполнены в виде нескольких переключателей. Например, в одном примере один или более из переключателей 2058a-2064b левого и/или правого шарнирного соединения могут быть объединены в один многопозиционный переключатель.
В одном аспекте процессор 2004 обеспечения безопасности выполнен с возможностью реализации предохранительной функции, среди других операций обеспечения безопасности. Процессор 2004 обеспечения безопасности и главный процессор 2006 сегментированной цепи 2000 обмениваются сигналами. Главный процессор 2006 также соединен с флеш-памятью 2086. Постоянный heartbeat-сигнал микропроцессора подается на выход 2096. Сегмент 2002c ускорения содержит акселерометр 2022, выполненный с возможностью отслеживания движения хирургического инструмента 10. В различных примерах акселерометр 2022 может представлять собой одно-, двух- или трехосный акселерометр. Акселерометр 2022 может использоваться для измерения надлежащего ускорения, которое не обязательно представляет собой ускорение в системе координат (быстрота изменения скорости). Вместо этого, акселерометр определяет ускорение, связанное с явлением силы тяжести, действующей на контрольную массу в состоянии покоя в системе координат акселерометра 2022. Например, акселерометр 2022 в состоянии покоя на поверхности земли измерит ускорение g=9,8 м/с2 (ускорение свободного падения) при вертикальном движении вверх, за счет силы тяжести. Другой тип ускорения, которое может измерить акселерометр 2022, представляет собой ускорение силы тяжести. В различных других примерах акселерометр 2022 может содержать одно-, двух- или трехосный акселерометр. Кроме того, сегмент 2002c ускорения может содержать один или более инерционных датчиков для определения и измерения ускорения, наклона, силы удара, вибрации, вращения и множества степеней свободы (DoF). Подходящий инерционный датчик может представлять собой акселерометр (одно-, двух- или трехосный), магнитометр для измерения магнитного поля в пространстве, таком как магнитное поле земли, и/или гироскоп для измерения угловой скорости.
В одном аспекте процессор 2004 обеспечения безопасности выполнен с возможностью реализации предохранительной функции в отношении одного или более сегментов 2002c-2002h цепи, таких как, например, сегмент 2002g двигателя. В этом отношении процессор 2004 обеспечения безопасности реализует предохранительную функцию в целях обнаружения и устранения неисправностей главного процессора 2006. Во время нормальной работы, процессор 2004 обеспечения безопасности следит за работой главного процессора 2006 на предмет отказов аппаратной части или программных ошибок и инициирует выполнение корректирующего действия или действий. Корректирующие действия могут включать перевод главного процессора 2006 в безопасный режим и восстановление нормальной работы системы. В одном примере процессор 2004 обеспечения безопасности соединен по меньшей мере с первым датчиком. Первый датчик измеряет первое свойство хирургического инструмента 10 (ФИГ. 1-4). В некоторых примерах процессор 2004 обеспечения безопасности выполнен с возможностью сравнения измеренного свойства хирургического инструмента 10 с заданной величиной. Например, в одном примере датчик 2040a двигателя (например, магнитный кодовый датчик углового положения) соединен с процессором 2004 обеспечения безопасности. Датчик 2040a двигателя подает информацию о скорости и положении двигателя на процессор 2004 обеспечения безопасности. Процессор 2004 обеспечения безопасности контролирует показания датчика 2040a двигателя и сравнивает указанную величину с максимальной величиной скорости и/или положения, а также предотвращает работу двигателя 2048 при превышении заданных величин. В некоторых примерах заданные величины вычисляют на основании скорости и/или положения двигателя 2048 в режиме реального времени, вычисленных из величин, поданных вторым датчиком 2040b двигателя (например, магнитным кодовым датчиком углового положения), находящимся в связи с главным процессором 2006, и/или поданных на процессор 2004 обеспечения безопасности от, например, модуля памяти, соединенного с процессором 2004 обеспечения безопасности.
В некоторых аспектах второй датчик соединен с главным процессором 2006. Второй датчик выполнен с возможностью измерения первого физического свойства. Процессор 2004 обеспечения безопасности и главный процессор 2006 выполнены с возможностью подачи сигнала, указывающего величину от первого датчика и второго датчика соответственно. Когда процессор 2004 обеспечения безопасности или главный процессор 2006 указывает величину, которая находится за пределами приемлемого диапазона, сегментированная цепь 2000 предотвращает работу по меньшей мере одного из сегментов 2002c-2002h цепи, такого как, например, сегмент 2002g двигателя. Например, в примере, изображенном на ФИГ. 21A-21B, процессор 2004 обеспечения безопасности соединен с первым датчиком 2040a положения двигателя, а главный процессор 2006 соединен со вторым датчиком 2040b положения двигателя. Датчики 2040a, 2040b положение двигателя могут представлять собой любой подходящий датчик положения двигателя, такой как, например, магнитный вход углового положения, содержащий выход синус-косинус. Датчики 2040a, 2040b положения двигателя подают соответствующие сигналы на процессор 2004 обеспечения безопасности и главный процессор 2006, которые указывают положение двигателя 2048.
Процессор 2004 обеспечения безопасности и главный процессор 2006 генерируют сигнал активации, когда величины от первого датчика 2040a двигателя и второго датчика 2040b двигателя находятся в пределах заданного диапазона. Когда главный процессор 2006 или процессор 2004 обеспечения безопасности обнаруживают величину, находящуюся в заданном диапазоне, сигнал активации прекращается и работа по меньшей мере одного сегмента 2002c-2002h цепи, такого как, например, сегмент 2002g двигателя, прерывается и/или предотвращается. Например, в некоторых примерах сигнал активации от главного процессора 2006 и сигнал активации от процессора 2004 обеспечения безопасности соединены с элементом И 2059. Элемент И 2059 соединен с переключателем 2020 питания двигателя. Элемент И 2059 поддерживает переключатель 2020 питания двигателя в замкнутом, или включенном, положении, когда сигнал активации как от процессора 2004 обеспечения безопасности, так и от главного процессора 2006 является высоким, что указывает, что величина от датчиков 2040a, 2040b двигателя находится в заданном диапазоне. Когда любой из датчиков 2040a, 2040b двигатель обнаруживает величину, находящуюся за пределами заданного диапазона, сигнал активации от этого датчика 2040a, 2040b двигателя устанавливается низким, и выход элемента И 2059 устанавливается низким, что приводит к размыканию переключателя 2020 питания двигателя. В некоторых примерах величины от первого датчика 2040a и второго датчика 2040b сравниваются, например, процессором 2004 обеспечения безопасности и/или главным процессором 2006. Если величины от первого датчика и второго датчика отличаются, процессор 2004 обеспечения безопасности и/или главный процессор 2006 могут предотвращать работу сегмента 2002g двигателя.
В некоторых аспектах процессор 2004 обеспечения безопасности принимает сигнал, который указывает величину от второго датчика 2040b, и сравнивает величину от второго датчика с величиной от первого датчика. Например, в одном аспекте процессор 2004 обеспечения безопасности соединен непосредственно с первым датчиком 2040a двигателя. Второй датчик 2040b двигателя соединен с главным процессором 2006, который подает величину от второго датчика 2040b двигателя на процессор 2004 обеспечения безопасности, и/или соединен непосредственно с процессором 2004 обеспечения безопасности. Процессор 2004 обеспечения безопасности сравнивает величину от первого датчика 2040 двигателя с величиной от второго датчика 2040b двигателя. Если процессор 2004 обеспечения безопасности обнаруживает несоответствие величин от первого датчика 2040a двигателя и второго датчика 2040b двигателя, процессор 2004 обеспечения безопасности может прекращать работу сегмент 2002g двигателя, например, путем прекращения подачи питания на сегмент 2002g двигателя.
В некоторых аспектах процессор 2004 обеспечения безопасности и/или главный процессор 2006 соединены с первым датчиком 2040a, выполненным с возможностью измерения первого свойства хирургического инструмента, и вторым датчиком 2040b, выполненным с возможностью измерения второго свойства хирургического инструмента. Первое свойство и второе свойство характеризуются заданным взаимоотношением, когда хирургический инструмент работает в нормальном режиме. Процессор 2004 обеспечения безопасности контролирует первое свойство и второе свойство. Если обнаруживают, что величина первого свойства и/или второго свойства не соответствует заданному взаимоотношению, происходит отказ. Когда происходит отказ, процессор 2004 обеспечения безопасности предпринимает по меньшей мере одно действие, такое как, например, предотвращение работы по меньшей мере одного из сегментов цепи, выполнение заданной операции и/или сброс главного процессора 2006. Например, процессор 2004 обеспечения безопасности может размыкать переключатель 2020 питания двигателя для прекращения подачи питания на сегмент 2002g цепи двигателя, когда обнаружен отказ.
В одном аспекте процессор 2004 обеспечения безопасности выполнен с возможностью выполнения независимого алгоритма управления. При работе, процессор 2004 обеспечения безопасности контролирует сегментированную цепь 2000 и выполнен с возможностью управления и/или игнорирования сигналов от других компонентов цепи, таких как, например, главный процессор 2006, независимым образом. Процессор 2004 обеспечения безопасности может выполнять предварительно запрограммированный алгоритм и/или может быть обновлен или запрограммирован в реальном времени в течение работы на основании одного или более действий и/или положений хирургического инструмента 10. Например, в одном примере процессор 2004 обеспечения безопасности повторно программируется с новыми параметрами и/или алгоритмами обеспечения безопасности каждый раз, когда новый стержень и/или концевой эффектор соединяют с хирургическим инструментом 10. В некоторых примерах одна или более величин обеспечения безопасности, хранящихся в процессоре 2004 обеспечения безопасности, дублируются главным процессором 2006. Двухстороннее обнаружение ошибок выполняется для проверки правильности величин и/или параметров, хранящихся в любом из процессоров 2004, 2006.
В некоторых аспектах процессор 2004 обеспечения безопасности и главный процессор 2006 осуществляют избыточную проверку безопасности. Процессор 2004 обеспечения безопасности и главный процессор 2006 подают периодические сигналы, указывающие нормальную работу. Например, во время работы, процессор 2004 обеспечения безопасности может указывать главному процессору 2006, что процессор 2004 обеспечения безопасности исполняет код и работает в нормальном режиме. Главный процессор 2006 может, аналогичным образом, указывать процессору 2004 обеспечения безопасности, что главный процессор 2006 исполняет код и работает в нормальном режиме. В некоторых примерах связь между процессором 2004 обеспечения безопасности и главным процессором 2006 происходит через заданные интервалы времени. Заданный интервал времени может быть постоянным или переменным в зависимости от состояния цепи и/или работы хирургического инструмента 10.
На ФИГ. 22 изображен один пример узла 2100 питания, содержащий цепь 2102 цикла использования, выполненную с возможностью контроля количества циклов использования узла 2100 питания. Узел 2100 питания может быть соединен с хирургическим инструментом 2110. Цепь 2102 цикла использования содержит процессор 2104 и индикатор 2106 использования. Индикатор 2106 использования выполнен с возможностью подачи сигнала на процессор 2104 для указания использования батарейного блока 2100 и/или хирургического инструмента 2110, соединенного с узлом 2100 питания. Термин «использование» может предусматривать любое подходящее действие, состояние и/или параметр, такой как, например, смена модульного компонента хирургического инструмента 2110, приведение в рабочее состояние или пуск одноразового компонента, соединенного с хирургическим инструментом 2110, подача электрохирургической энергии от хирургического инструмента 2110, восстановление хирургического инструмента 2110 и/или узла 2100 питания, замена узла 2100 питания, перезарядка узла 2100 питания и/или превышение предела безопасности хирургического инструмента 2110 и/или батарейного блока 2100.
В некоторых примерах цикл использования, или использование, определяется одним или более параметрами узла 2100 питания. Например, в одном примере цикл использования предусматривает использование более 5% от общей энергии, доступной от узла 2100 питания, когда узел 2100 питания полностью заряжен. В другом примере цикл использования предусматривает постоянное потребление энергии от узла 2100 питания с превышением заданного ограничения по времени. Например, цикл использования может соответствовать пяти минутам постоянного и/или общего потребления энергии от узла 2100 питания. В некоторых примерах узел 2100 питания содержит цепь 2102 цикла использования с постоянным энергопотреблением для поддержания одного или более компонентов цепи 2102 цикла использования, таких как, например, индикатор 2106 использования и/или счетчик 2108, в активном состояния.
Процессор 2104 осуществляет подсчет циклов использования. Подсчет циклов использования указывает количество использований, определенных индикатором 2106 использования, узла 2100 питания и/или хирургического инструмента 2110. Процессор 2104 может увеличивать и/или уменьшать количество циклов использования на основании входных данных от индикатора 2106 использования. Подсчет циклов использования применяется для управления одной или более операциями узла 2100 питания и/или хирургического инструмента 2110. Например, в некоторых примерах узел 2100 питания отключается, когда количество циклов использования превышает заданный предел использований. Хотя примеры, описанные в настоящем документе, приводятся в отношении увеличения количества циклов использования свыше заданного предела использований, специалистам в данной области техники будет понятно, что количество циклов использования может начинаться с заданной величины и уменьшаться процессором 2104. В этом примере процессор 2104 инициирует и/или предотвращает одну или более операций узла 2100 питания, когда количество циклов использования падает ниже заданного предела использований.
Подсчет циклов использования осуществляется счетчиком 2108. Счетчик 2108 содержит любую подходящую цепь, такую как, например, модуль памяти, аналоговый счетчик и/или любую цепь, выполненную с возможностью осуществления подсчета циклов использования. В некоторых примерах счетчик 2108 выполнен как единое целое с процессором 2104. В других примерах счетчик 2108 содержит отдельный компонент, такой как, например, твердотельный модуль памяти. В некоторых примерах количество циклов использования подается на удаленную систему, такую как, например, центральная база данных. Количество циклов использования передается модулем 2112 связи на удаленную систему. Модуль 2112 связи выполнен с возможностью использования любой подходящей среды связи, такой как, например, проводная и/или беспроводная связь. В некоторых примерах модуль 2112 связи выполнен с возможностью приема одной или более команд от удаленной системы, таких как, например, сигнал управления, когда количество циклов использования превышает заданный предел использований.
В некоторых примерах индикатор 2106 использования выполнен с возможностью контроля количества модульных компонентов, используемых с хирургическим инструментом 2110, соединенным с узлом 2100 питания. Модульный компонент может представлять собой, например, модульный стержень, модульный концевой эффектор и/или любой другой модульный компонент. В некоторых примерах индикатор 2106 использования контролирует использование одного или более одноразовых компонентов, такое как, например, вставка и/или приведение в действие кассеты со скобами в концевом эффекторе, соединенном с хирургическим инструментом 2110. Индикатор 2106 использования содержит один или более датчиков для определения замены одного или более модульных и/или одноразовых компонентов хирургического инструмента 2110.
В некоторых примерах индикатор 2106 использования выполнен с возможностью контроля хирургических процедур для одного пациента, выполняемых при установленном узле 2100 питания. Например, индикатор 2106 использования может быть выполнен с возможностью контроля операций пуска хирургического инструмента 2110, когда узел 2100 питания соединен с хирургическим инструментом 2110. Операция пуска может соответствовать приведению в действие кассеты со скобами, подаче электрохирургической энергии и/или любому другому подходящему хирургическому событию. Индикатор 2106 использования может содержать одну или более цепей для измерения количества операций пуска, когда узел 2100 питания установлен. Индикатор 2106 использования подает сигнал на процессор 2104, когда выполняется процедура для одного пациента, а процессор 2104 увеличивает количество циклов использования.
В некоторых примерах индикатор 2106 использования содержит цепь, выполненную с возможностью контроля одного или более параметров источника 2114 питания, таких как, например, потребление тока источника 2114 питания. Один или более параметров источника 2114 питания соответствуют одной или более операциям, выполняемым хирургическим инструментом 2110, таким как, например, операция рассечения и ушивания. Индикатор 2106 использования подает один или более параметров на процессор 2104, который увеличивает количество циклов использования, когда один или более параметров указывают, что процедура была выполнена.
В некоторых примерах индикатор 2106 использования содержит цепь синхронизации, выполненную с возможностью увеличения количества циклов использования после истечения заданного периода времени. Заданный период времени соответствует времени процедуры для одного пациента, которое представляет собой время, необходимое оператору для выполнения процедуры, такой как, например, процедура рассечения и ушивания. Когда узел 2100 питания соединен с хирургическим инструментом 2110, процессор 2104 отправляет запрос на индикатор 2106 использования для определения того, истекло ли время процедуры для одного пациента. После истечения заданного периода времени, процессор 2104 увеличивает количество циклов использования. После увеличения количества циклов использования, процессор 2104 сбрасывает цепь синхронизации индикатора 2106 использования.
В некоторых примерах индикатор 2106 использования содержит постоянную времени, которая приблизительно соответствует времени процедуры для одного пациента. В одном примере цепь 2102 цикла использования содержит резистивно-емкостную (RC) цепь 2506 синхронизации. RC цепь синхронизации содержит постоянную времени, определенную парой резистор-конденсатор. Постоянная времени определена величинами резистора и конденсатора. В одном примере цепь 2552 цикла использования содержит перезаряжаемую батарею и тактовый генератор. Когда узел 2100 питания установлен в хирургическом инструменте, перезаряжаемая батарея заряжается от источника питания. Перезаряжаемая батарея содержит достаточно энергии, чтобы запустить тактовый генератор, по меньшей мере на время процедуры для одного пациента. Тактовый генератор может представлять собой тактовый генератор реального времени, процессор, выполненный с возможностью реализации временной функции, или любую другую подходящую цепь синхронизации.
Как показано на ФИГ. 22, в некоторых примерах индикатор 2106 использования содержит датчик, выполненный с возможностью контроля одного или более условий окружающей среды, воздействующих на узел 2100 питания. Например, индикатор 2106 использования может содержать акселерометр. Акселерометр выполнен с возможностью контроля ускорения узла 2100 питания. Узел 2100 питания имеет максимальное допустимое ускорение. Ускорение свыше заданного порогового значения указывает, например, что узел 2100 питания был сброшен. Когда индикатор 2106 использования обнаруживает, что ускорение превышает максимальное допустимое ускорение, процессор 2104 увеличивает количество циклов использования. В некоторых примерах индикатор 2106 использования содержит датчик влажности. Датчик влажности выполнен с возможностью указания, когда узел 2100 питания был подвергнут воздействию влажности. Датчик влажности может представлять собой, например, погружной датчик, выполненный с возможностью указаний того, когда узел 2100 питания был полностью погружен в чистящую жидкость, причем датчик влажности выполнен с возможностью указания того, когда влага находится в контакте с узлом 2100 питания во время использования, и/или любой другой подходящий датчик влажности.
В некоторых примерах индикатор 2106 использования содержит датчик химического воздействия. Датчик химического воздействия выполнен с возможностью указания того, когда узел 2100 питания вошел в контакт с вредными и/или опасными химическими веществами. Например, во время процедуры стерилизации может использоваться неподходящее химическое вещество, которое приводит к ухудшению свойств узла 2100 питания. Процессор 2104 увеличивает количество циклов использования, когда индикатор 2106 использования обнаруживает наличие неподходящего химического вещества.
В некоторых примерах цепь 2102 цикла использования выполнена с возможностью контроля количества циклов восстановления, которые проходил узел 2100 питания. Цикл восстановления может представлять собой, например, цикл чистки, цикл стерилизации, цикл зарядки, плановое и/или профилактическое техобслуживание и/или любой другой подходящий цикл восстановления. Индикатор 2106 использования выполнен с возможностью обнаружения цикла восстановления. Например, индикатор 2106 использования может содержать датчик влажности для обнаружения цикла чистки и/или стерилизации. В некоторых примерах цепь 2102 цикла использования контролирует количество циклов восстановления, которые проходит узел 2100 питания, и отключает узел 2100 питания после того, как количество циклов восстановления превышает заданное пороговое значение.
Цепь 2102 цикла использования может быть выполнена с возможностью контроля количества замен узла 2100 питания. Цепь 2102 цикла использования увеличивает количество циклов использования при каждой замене узла 2100 питания. После превышения максимального количества замен, цепь 2102 цикла использования блокирует узел 2100 питания и/или хирургический инструмент 2110. В некоторых примерах, когда узел 2100 питания соединен с хирургическим инструментом 2110, цепь 2102 цикла использования определяет серийный номер узла 2100 питания и блокирует узел 2100 питания таким образом, что узел 2100 питания можно использовать только с хирургическим инструментом 2110. В некоторых примерах цепь 2102 цикла использования увеличивает количество циклов использования при каждом отсоединении узла 2100 питания от хирургического инструмента 2110 и/или присоединении к нему.
В некоторых примерах количество циклов использования соответствует стерилизации узла 2100 питания. Индикатор 2106 использования содержит датчик, выполненный с возможностью определения одного или более параметров цикла стерилизации, таких как, например, температурный параметр, химический параметр, влажностный параметр и/или любой другой подходящий параметр. Процессор 2104 увеличивает количество циклов использования при определении параметра стерилизации. Цепь 2102 цикла использования отключает узел 2100 питания после заданного количества стерилизаций. В некоторых примерах цепь 2102 цикла использования сбрасывается во время цикла стерилизации, или используется датчик напряжения для определения цикла перезарядки и/или любой подходящий датчик. Процессор 2104 увеличивает количество циклов использования при определении цикла восстановления. Цепь 2102 цикла использования отключается при определении цикла стерилизации. Цепь 2102 цикла использования повторно активируется и/или сбрасывается, когда узел 2100 питания соединен с хирургическим инструментом 2110. В некоторых примерах индикатор использования содержит индикатор нулевой мощности. Индикатор нулевой мощности меняет состояние во время цикла стерилизации и проверяется процессором 2104, когда узел 2100 питания соединен с хирургическим инструментом 2110. Когда индикатор нулевой мощности указывает, что произошел цикл стерилизации, процессор 2104 увеличивает количество циклов использования.
Счетчик 2108 осуществляет подсчет циклов использования. В некоторых примерах счетчик 2108 содержит энергонезависимый модуль памяти. Процессор 2104 увеличивает количество циклов использования, хранящееся в энергонезависимом модуле памяти, при каждом определении цикла использования. К модулю памяти может обращаться процессор 2104 и/или цепь управления, такую как, например, цепь 2000 управления. Когда количество циклов использования превышает заданное пороговое значение, процессор 2104 отключает узел 2100 питания. В некоторых примерах подсчет циклов использования осуществляется множество компонентов цепи. Например, в одном примере счетчик 2108 содержит блок резисторов (или плавких предохранителей). После каждого использования узла 2100 питания, резистор (или плавкий предохранитель) сгорает с переходом в разомкнутое положение, в результате чего сопротивление блока резисторов меняется. Узел 2100 питания и/или хирургический инструмент 2110 характеризуется оставшимся сопротивлением. После сгорания последнего резистора из блока резисторов, блок резисторов имеет заданное сопротивление, такое как, например, конечное сопротивление, соответствующее разомкнутой цепи, которое указывает, что узел 2100 питания достиг предела использований. В некоторых примерах сопротивление блока резисторов используется для определения количества оставшихся использований.
В некоторых примерах цепь 2102 цикла использования предотвращает последующее использование узла 2100 питания и/или хирургического инструмента 2110, когда количество циклов использования превышает заданный предел использований. В одном примере количество циклов использования, связанное с узлом 2100 питания, предоставляется оператору, например, с использованием экрана, выполненного как одно целое с хирургическим инструментом 2110. Хирургический инструмент 2110 предоставляет оператору указание о том, что количество циклов использования превысило заданный предел для узла 2100 питания, и дальнейшая работа хирургическим инструментом 2110 предотвращается.
В некоторых примерах цепь 2102 цикла использования выполнена с возможностью физического предотвращения работа после достижения заданного предела использований. Например, узел 2100 питания может содержать предохранительный элемент, выполненный с возможностью развертывания поверх контактов узла 2100 питания, когда количество циклов использования превышает заданный предел использований. Предохранительный элемент предотвращает перезарядку и использование узла 2100 питания за счет закрывания электрических соединений узла 2100 питания.
В некоторых примерах цепь 2102 цикла использования расположена по меньшей мере частично в хирургическом инструменте 2110 и выполнена с возможностью подсчета циклов использования хирургического инструмента 2110. На ФИГ. 22 изображен один или более компонентов цепи 2102 цикла использования в хирургическом инструменте 2110 пунктирными линиями, с изображением альтернативного размещения цепи 2102 цикла использования. После превышения заданного предела использований хирургического инструмента 2110, цепь 2102 цикла использования отключает и/или предотвращает работу хирургического инструмента 2110. Количество циклов использования увеличивается цепью 2102 цикла использования, когда индикатор 2106 использования определяет наличие характерного события и/или требования, такого как, например, спуск хирургического инструмента 2110, истечение заданного периода времени, соответствующего времени процедуры для одного пациента, на основании одного или более параметров двигателя хирургического инструмента 2110, в ответ на диагностическую информацию системы, которая указывает достижение одного или более заданных пороговых значений, и/или любое другой подходящее требование. Как описано выше, в некоторых примерах индикатор 2106 использования содержит цепь синхронизации, соответствующую времени процедуры для одного пациента. В других примерах индикатор 2106 использования содержит один или более датчиков, выполненных с возможностью определения наличия характерного события и/или состояния хирургического инструмента 2110.
В некоторых примерах цепь 2102 цикла использования выполнена с возможностью предотвращения работы хирургического инструмента 2110 после достижения заданного предела использований. В некоторых примерах хирургический инструмент 2110 содержит видимый индикатор, указывающий достижение и/или превышение заданного предела использований. Например, флажковый указатель, такой как красный флажковый указатель, может появляться на хирургическом инструменте 2110, например, на рукоятке, для предоставления визуального указания оператору о превышении хирургическим инструментом 2110 заданного предела использований. В другом примере цепь 2102 цикла использования может быть соединена с дисплеем, выполненным как единое целое с хирургическим инструментом 2110. Цепь 2102 цикла использования отображает сообщение, указывающее превышение заданного предела использований. Хирургический инструмент 2110 может предоставлять звуковое указание оператору о превышении заданного предела использований. Например, в одном примере хирургический инструмент 2110 выдает слышимый звуковой сигнал при превышении заданного предела использований, после чего узел 2100 питания отсоединяется от хирургического инструмента 2110. Слышимый звуковой сигнал указывает последнее использование хирургического инструмента 2110 и указывает, что хирургический инструмент 2110 следует подвергнуть утилизации или восстановлению.
В некоторых примерах цепь 2102 цикла использования выполнена с возможностью передачи количества циклов использования хирургического инструмента 2110 в удаленный пункт, такой как, например, центральная база данных. Цепь 2102 цикла использования содержит модуль 2112 связи, выполненный с возможностью передачи количества циклов использования в удаленный пункт. Модуль 2112 связи может использовать любую подходящую систему связи, такую как, например, система проводной или беспроводной связи. Удаленный пункт может представлять собой центральную базу данных, выполненную с возможностью хранения информации об использовании. В некоторых примерах, когда узел 2100 питания соединен с хирургическим инструментом 2110, узел 2100 питания записывает серийный номер хирургического инструмента 2110. Серийный номер передается в центральную базу данных, например, когда узел 2100 питания соединен с зарядным устройством. В некоторых примерах центральная база данных хранит число, соответствующее каждому использованию хирургического инструмента 2110. Например, может осуществляться сканирование штрихкода, связанного с хирургическим инструментом 2110, при каждом использовании хирургического инструмента 2110. Когда количество использований превышает заданный предел использований, центральная база данных подает сигнал на хирургический инструмент 2110, который указывает, что хирургический инструмент 2110 необходимо выбросить.
Хирургический инструмент 2110 может быть выполнен с возможностью блокирования и/или предотвращения работы хирургического инструмента 2110, когда количество циклов использования превышает заданный предел использований. В некоторых примерах хирургический инструмент 2110 представляет собой одноразовый инструмент и выбрасывается после того, как количество циклов использования превышает заданный предел использований. В других примерах хирургический инструмент 2110 представляет собой многоразовый хирургический инструмент, который может быть восстановлен после того, как количество циклов использования превышает заданный предел использований. Хирургический инструмент 2110 инициирует обратимую блокировку после достижения заданного предела использований. Технический специалист восстанавливает хирургический инструмент 2110 и сбрасывает блокировку, например, с использованием специализированного ключа технического специалиста, выполненного с возможностью сброса цепи 2102 цикла использования.
В некоторых аспектах сегментированная цепь 2000 выполнена с возможностью последовательного запуска. Проверка ошибок выполняется каждым сегментом 2002a-2002g цепи перед подачей питания на следующий последовательный сегмент 2002a-2002g цепи. На ФИГ. 23 изображен один пример процесса последовательной подачи питания на сегментированную цепь 2270, такую как, например, сегментированная цепь 2000. Когда батарея 2008 соединена с сегментированной цепью 2000, процессор 2004 обеспечения безопасности приводится в действие 2272. Процессор 2004 обеспечения безопасности выполняет самопроверку ошибок 2274. Если ошибка обнаружена 2276a, процессор обеспечения безопасности прекращает подавать питание на сегментированную цепь 2000 и генерирует код ошибки 2278a. Если ошибки не обнаружены 2276b, процессор 2004 обеспечения безопасности инициирует 2278b включение главного процессора 2006. Главный процессор 2006 выполняет самопроверку ошибок. Если ошибки не обнаружены, главный процессор 2006 начинает последовательное включение каждого из оставшихся сегментов 2278b цепи. На каждый сегмент цепи подается питание, а ошибки проверяются главным процессором 2006. Если ошибки не обнаружены, питание подается на следующий сегмент цепи 2278b. Если ошибка обнаружена, процессор 2004 обеспечения безопасности и/или главный процессор прекращает подавать питание на текущий сегмент и генерирует ошибку 2278a. Последовательное приведение в действие продолжается до тех пор, пока питание не будет подано на все сегменты 2002a-2002g цепи.
На ФИГ. 24 изображен один аспект сегмента 2302 питания, содержащего множество последовательно подключенных преобразователей 2314, 2316, 2318 мощности. Сегмент 2302 питания содержит батарею 2308. Батарея 2308 выполнен с возможностью подачи напряжения питания, такого как, например, 12 В. Датчик 2312 тока соединен с батареей 2308 для контроля потребления тока сегментированной цепи и/или одного или более сегментов цепи. Датчик 2312 тока соединен с переключателем на FET 2313. Батарея 2308 соединена с одним или более преобразователями 2309, 2314, 2316 напряжения. Постоянно включенный преобразователь 2309 подает постоянное напряжение на один или более компонентов цепи, таких как, например, датчик 2322 движения. Постоянно включенный преобразователь 2309 представляет собой, например, преобразователь на 3,3 В. Постоянно включенный преобразователь 2309 может подавать постоянное напряжение на дополнительные компоненты цепи, такие как, например, процессор обеспечения безопасности (не показан). Батарея 2308 соединена с повышающим преобразователем 2318. Повышающий преобразователь 2318 выполнен с возможностью подачи повышенного напряжения, превышающего напряжение, которое подается от батареи 2308. Например, в изображенном примере батарея 2308 подает напряжение 12 В. Повышающий преобразователь 2318 выполнен с возможностью повышения напряжения до 13 В. Повышающий преобразователь 2318 выполнен с возможностью поддержания минимального напряжения во время работы хирургического инструмента, например, хирургического инструмента 10 (ФИГ. 1-4). Работа двигателя может приводить к падению питания, подаваемого на главный процессор 2306, ниже минимального порогового значения и понижению напряжения или сбросу главного процессора 2306. Повышающий преобразователь 2318 гарантирует подачу достаточного питания на главный процессор 2306 и/или другие компоненты цепи, такие как контроллер 2343 двигателя, во время работы хирургического инструмента 10. В некоторых примерах повышающий преобразователь 2318 соединен непосредственно с одним или более компонентами цепи, такими как, например, дисплей на OLED 2388.
Повышающий преобразователь 2318 соединен с одним или более понижающими преобразователями для подачи напряжений ниже уровня повышенного напряжения. Первый преобразователь 2316 напряжения соединен с повышающим преобразователем 2318 и подает первое пониженное напряжение на один или более компонентов цепи. В изображенном примере первый преобразователь 2316 напряжения подает напряжение 5 В. Первый преобразователь 2316 напряжения соединен с кодовым датчиком 2340 углового положения. Переключатель на FET 2317 подключен между первым преобразователем 2316 напряжения и кодовым датчиком 2340 углового положения. Переключатель на FET 2317 управляется процессором 2306. Процессор 2306 размыкает переключатель на FET 2317 для деактивации кодового датчика 2340 положения, например, во время энергоемких операций. Первый преобразователь 2316 напряжения соединен со вторым преобразователем 2314 напряжения, выполненным с возможностью подачи второго пониженного напряжения. Второе пониженное напряжение составляет, например, 3,3 В. Второй преобразователь 2314 напряжения соединен с процессором 2306. В некоторых примерах повышающий преобразователь 2318, первый преобразователь 2316 напряжения и второй преобразователь 2314 напряжения подключены последовательно. Последовательное подключение позволяет использовать более компактные и эффективные преобразователи для генерирования уровней напряжения ниже уровня повышенного напряжения. Однако примеры не ограничены конкретным диапазоном (диапазонами) напряжения, описанными в контексте настоящего изобретения.
На ФИГ. 25 изображен один аспект сегментированной цепи 2400, выполненной с возможностью максимального увеличения подачи питания для критических и/или энергоемких функций. Сегментированная цепь 2400 содержит батарею 2408. Батарея 2408 выполнена с возможностью подачи напряжения питания, такого как, например, 12 В. Напряжение питания подается на множество преобразователей 2409, 2418 напряжения. Постоянно включенный преобразователь 2409 напряжения подает постоянное напряжение на один или более компонентов цепи, например, датчик 2422 движения и процессор 2404 обеспечения безопасности. Постоянно включенный преобразователь 2409 напряжения непосредственно соединен с батареей 2408. Постоянно включенный преобразователь 2409 подает напряжение, например, 3,3 В. Однако примеры не ограничены конкретным диапазоном (диапазонами) напряжения, описанными в контексте настоящего изобретения.
Сегментированная цепь 2400 содержит повышающий преобразователь 2418. Повышающий преобразователь 2418 подает повышенное напряжение, превышающее напряжение питания, подаваемое от батареи 2408, такое как, например, 13 В. Повышающий преобразователь 2418 подает повышенное напряжение непосредственно на один или более компонентов цепи, таких как, например, дисплей на OLED 2488 и контроллер 2443 двигателя. За счет подключения дисплея на OLED 2488 непосредственно к повышающему преобразователю 2418, в сегментированной цепи 2400 устраняется необходимость в преобразователе мощности, выделенном для дисплея на OLED 2488. Повышающий преобразователь 2418 подает повышенное напряжение на контроллер 2443 двигателя и двигатель 2448 во время одной или более энергоемких операций двигателя 2448, таких как, например, операция рассечения. Повышающий преобразователь 2418 соединен с понижающим преобразователем 2416. Понижающий преобразователь 2416 выполнен с возможностью подачи напряжения, которое ниже повышенного напряжения, на один или более компонентов цепи, такого как, например, 5 В. Понижающий преобразователь 2416 соединен с, например, переключателем на FET 2451 и кодовым датчиком 2440 положения. Переключатель на FET 2451 соединен с главным процессором 2406. Главный процессор 2406 размыкает переключатель на FET 2451 при переводе сегментированной цепи 2400 в спящий режим и/или во время энергоемких операций, требующих подачи дополнительного напряжения на двигатель 2448. В результате размыкания переключателя на FET 2451 происходит деактивация кодового датчика 2440 положения и устраняется потребление мощности кодового датчика 2440 положения. Однако примеры не ограничены конкретным диапазоном (диапазонами) напряжения, описанными в контексте настоящего изобретения.
Понижающий преобразователь 2416 соединен с линейным преобразователем 2414. Линейный преобразователь 2414 выполнен с возможностью подачи напряжения, например, 3,3 В. Линейный преобразователь 2414 соединен с главным процессором 2406. Линейный преобразователь 2414 подает рабочее напряжение на главный процессор 2406. Линейный преобразователь 2414 может быть соединен с одним или более дополнительными компонентами цепи. Однако примеры не ограничены конкретным диапазоном (диапазонами) напряжения, описанными в контексте настоящего изобретения.
Сегментированная цепь 2400 содержит аварийный переключатель 2456. Аварийный переключатель 2456 соединен с аварийной дверцей на хирургическом инструменте 10. Аварийный переключатель 2456 и процессор 2404 обеспечения безопасности соединены с элементом И 2419. Элемент И 2419 обеспечивает входное воздействие на переключатель на FET 2413. Когда аварийный переключатель 2456 обнаруживает аварийное состояние, аварийный переключатель 2456 подает сигнал аварийного отключения на элемент И 2419. Когда процессор 2404 обеспечения безопасности обнаруживает небезопасное состояние, такое как, например, вызванное несоответствием величин от датчиков, процессор 2404 обеспечения безопасности подает сигнал отключения на элемент И 2419. В некоторых примерах как сигнал аварийного отключения, так и сигнал отключения являются высокими во время нормальной работы и низкими при обнаружении аварийного состояния или небезопасного состояния. Когда выходной сигнал от элемента И 2419 является низким, переключатель на FET 2413 размыкается, и работа двигателя 2448 предотвращается. В некоторых примерах процессор 2404 обеспечения безопасности использует сигнал отключения для перевода двигателя 2448 в выключенное состояние в спящем режиме. Третий выходной сигнал на переключатель на FET 2413 подается от датчика 2412 тока, соединенного с батареей 2408. Датчик 2412 тока контролирует потребление тока цепью 2400 и размыкает переключатель на FET 2413 для прекращения подачи питания на двигатель 2448, когда обнаруживается, что электрический ток превышает заданное пороговое значение. Переключатель на FET 2413 и контроллер 2443 двигателя соединены с блоком переключателей на FET 2445, выполненным с возможностью управления работой двигателя 2448.
Датчик 2446 тока двигателя последовательно соединен с двигателем 2448 для подачи величины от датчика тока двигателя на устройство 2447 контроля тока. Устройство 2447 контроля тока соединено с главным процессором 2406. Устройство 2447 контроля тока подает сигнал, указывающий потребление тока двигателя 2448. Главный процессор 2406 может использовать сигнал от устройства контроля 2447 тока двигателя для управления работой двигателя, например, для обеспечения того, что потребление тока двигателя 2448 находится в пределах допустимого диапазона, для сравнения потребления тока двигателя 2448 с одним или более другими параметрами цепи 2400, такими как, например, кодовый датчик 2440 положения, и/или определения одного или более параметров области лечения. В некоторых примерах устройство 2447 контроля тока может быть соединено с процессором 2404 обеспечения безопасности.
В некоторых аспектах активация одного или более средств управления рукояткой, таких как, например, пусковой крючок, приводит к снижению подачи питания главным процессором 2406 на один или более компонентов, когда средство управления рукояткой активировано. Например, в одном примере пусковой крючок управляет пусковым ходом разрезающего элемента. Разрезающий элемент приводится в действие двигателем 2448. Активация пускового крючка приводит к срабатыванию двигателя 2448 и продвижению разрезающего элемента. Во время пуска главный процессор 2406 размыкает переключатель на FET 2451 для прекращения подачи питания на кодовый датчик 2440 положения. Деактивация одного или более компонентов цепи позволяет подать больше питания на двигатель 2448. Когда пусковой крючок высвобожден, вся энергия возвращается на деактивированные компоненты, например, путем замыкания переключателя на FET 2451 и повторной активации кодового датчика 2440 положения.
В некоторых аспектах процессор 2404 обеспечения безопасности управляет работой сегментированной цепи 2400. Например, процессор 2404 обеспечения безопасности может инициировать последовательное включение сегментированной цепи 2400, перевод сегментированной цепи 2400 в спящий режим и из него и/или может игнорировать один или более сигналов управления от главного процессора 2406. Например, в изображенном примере процессор 2404 обеспечения безопасности соединен с понижающим преобразователем 2416. Процессор 2404 обеспечения безопасности управляет работой сегментированной цепи 2400 путем активации или деактивации понижающего преобразователя 2416 для подачи питания на оставшиеся сегменты сегментированной цепи 2400.
На ФИГ. 26 изображен один аспект системы 2500 питания, содержащей множество последовательно подключенных преобразователей 2514, 2516, 2518 мощности, выполненных с возможностью последовательного питания. Множество последовательно подключенных преобразователей 2514, 2516, 2518 мощности могут быть последовательно активированы, например, процессором обеспечения безопасности во время первоначального включения и/или перевода из спящего режима. На процессор обеспечения безопасности питание может подаваться независимым преобразователем мощности (не показан). Например, в одном примере, когда напряжение батареи VBATT связано с системой 2500 питания и/или акселерометр обнаруживает движение в спящем режиме, процессор обеспечения безопасности инициирует последовательный запуск последовательно подключенных преобразователей 2514, 2516, 2518 мощности. Процессор обеспечения безопасности активирует повышающий участок 2518 на 13 В. На повышающий участок 2518 подается питание и он выполняет самопроверку. В некоторых примерах повышающий участок 2518 содержит интегральную схему 2520, выполненную с возможностью повышения напряжения питания и выполнения самопроверки. Диод D предотвращает включение участка 2516 подачи питания на 5 В до тех пор, пока повышающий участок 2518 не завершит самопроверку и не подаст сигнал на диод D, указывающий, что повышающий участок 2518 не нашел ошибок. В некоторых примерах этот сигнал подается процессором обеспечения безопасности. Однако примеры не ограничены конкретным диапазоном (диапазонами) напряжения, описанными в контексте настоящего изобретения.
Участок 2516 подачи питания на 5 последовательно приводится в действие после повышающего участка 2518. Участок 2516 подачи питания на 5 В выполняет самопроверку во время включения для определения наличия ошибок в участке 2516 подачи питания на 5 В. Участок 2516 подачи питания на 5 В содержит интегральную схему 2515, выполненную с возможностью подачи пониженного напряжения относительно повышенного напряжения и выполнения проверки ошибок. Если ошибки не обнаружены, участок 2516 подачи питания на 5 В осуществляет последовательное включение и подает сигнал активации на участок 2514 подачи питания на 3,3 В. В некоторых примерах процессор обеспечения безопасности подает сигнал активации на участок 2514 подачи питания на 3,3 В. Участок подачи питания на 3,3 В содержит интегральную схему 2513, выполненную с возможностью подачи понижающего напряжения от участка 2516 подачи питания на 5 В и выполнения самопроверки ошибок во время включения. Если во время самопроверки ошибки не обнаружены, участок 2514 подачи питания на 3,3 В подает питание на главный процессор. Главный процессор выполнен с возможностью последовательной подачи питания на каждый из оставшихся сегментов цепи. Путем последовательной подачи питания на систему 2500 питания и/или оставшиеся сегменты сегментированной цепи, система питания 2500 снижает вероятность возникновения ошибок, обеспечивает стабилизацию уровней напряжения перед приложением нагрузок и предотвращает значительное потребление тока от всех аппаратных компонентов, включаемых одновременно неуправляемым образом. Однако примеры не ограничены конкретным диапазоном (диапазонами) напряжения, описанными в контексте настоящего изобретения.
В одном аспекте система 2500 питания содержит цепь определения и снижения перенапряжения. Цепь определения и снижения перенапряжения выполнена с возможностью обнаружения однополярного обратного тока в хирургическом инструменте и прекращения подачи питания от сегмента питания, когда однополярный обратный ток обнаружен. Цепь определения и снижения перенапряжения выполнена с возможностью определения плавающего заземления системы питания. Цепь определения и снижения перенапряжения содержит металлооксидный варистор. Цепь определения и снижения перенапряжения содержит по меньшей мере один защитный диод.
На ФИГ. 27 изображен один аспект сегментированной цепи 2600, содержащей изолированный участок 2602 управления. Изолированный участок 2602 управления изолирует аппаратные средства управления сегментированной цепи 2600 от участка питания (не показан) сегментированной цепи 2600. Участок 2602 управления содержит, например, главный процессор 2606, процессор обеспечения безопасности (не показан) и/или дополнительные аппаратные средства управления, например, переключатель на FET 2617. Участок управления содержит, например, двигатель, драйвер двигателя и/или множество MOSFET двигателя. Изолированный участок 2602 управления содержит цепь 2603 зарядки и перезаряжаемую батарею 2608, соединенную с преобразователем 2616 мощности на 5 В. Цепь 2603 зарядки и перезаряжаемая батарея 2608 изолируют главный процессор 2606 от участка питания. В некоторых примерах перезаряжаемая батарея 2608 соединена с процессором обеспечения безопасности и любым дополнительным вспомогательным аппаратным средством. За счет изоляции участка 2602 управления от участка питания, участок 2602 управления, например, главный процессор 2606, может оставаться активным даже когда подача основного питания прекращена, предоставляется фильтр, посредством перезаряжаемой батареи 2608, для предохранения участка 2602 управления от шума, обеспечивается изоляция участка 2602 управления от больших перепадов напряжения батареи для обеспечения правильной работы даже при высоких нагрузках на двигатель и/или допускается возможность использования операционной системы реального времени (RTOS) сегментированной цепью 2600. В некоторых примерах перезаряжаемая батарея 2608 подает пониженное напряжение на главный процессор, такое как, например, 3,3 В. Однако примеры не ограничены конкретным диапазоном (диапазонами) напряжения, описанными в контексте настоящего изобретения.
На ФИГ. 28A и 28B изображен другой аспект цепи 3000 управления, выполненный с возможностью управления хирургическим инструментом 10 с электроприводом, изображенным на ФИГ. 1-18A. Как показано на ФИГ. 18A, 28B, узел 14 рукоятки может содержать двигатель 3014, который может управляться драйвером 3015 двигателя и может использоваться пусковой системой хирургического инструмента 10. В различных формах двигатель 3014 может представлять собой приводной щеточный двигатель постоянного тока с максимальной скоростью вращения, например, приблизительно 25 000 оборотов в минуту. В других конструкциях двигатель 3014 может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель. В некоторых обстоятельствах драйвер 3015 двигателя может содержать, например, несколько FET 3019 с Н-мостом, как изображено на ФИГ. 28B. Питание на двигатель 3014 может подаваться от узла 3006 питания, который может быть установлен с возможностью отсоединения на узле 14 рукоятки. Узел 3006 питания выполнен с возможностью подачи управляющего питания на хирургический инструмент 10. Узел 3006 питания может содержать батарею, которая может содержать некоторое количество элементов батареи, соединенных последовательно, которые могут использоваться в качестве источника питания для питания хирургического инструмента 10. В такой конфигурации узел 3006 питания может называется батарейный блоком. В некоторых обстоятельствах элементы батареи узла 3006 питания могут быть заменяемыми и/или перезаряжаемыми. По меньшей мере в одном примере элементы батареи могут представлять собой литий-ионные батареи, которые могут быть по отдельности подключены к узлу 3006 питания.
Примеры приводных систем и закрывающих систем, подходящих для использования с хирургическим инструментом 10, описаны в предварительной заявке на патент США № 61/782,866, озаглавленной CONTROL SYSTEM OF A SURGICAL INSTRUMENT и поданной 14 марта 2013 г., содержание которой полностью включено в настоящий документ посредством ссылки. Например, электрический двигатель 3014 может содержать вращающийся вал (не показан), функционально стыкующийся с узлом зубчатого редуктора, который монтируется так, что находится в зубчатом зацеплении с набором или рейкой приводных зубцов на выполненном с возможностью продольного перемещения приводном элементе. При использовании полярность напряжения, обеспечиваемая батареей, может заставлять электрический двигатель 3014 активировать выполненный с возможностью продольного перемещения приводной элемент для приведения в действие концевого эффектора 300. Например, двигатель 3014 может быть выполнен с возможностью приведения в действие выполненного с возможностью продольного перемещения приводного элемента, например, для продвижения пускового механизма для выпускания скоб в ткань, захваченную концевым эффектором 300, из кассеты со скобами, собранной с концевым эффектором 300, и/или продвигать разрезающий элемент для разрезания ткани, захваченной концевым эффектором 300.
Как изображено на ФИГ. 28A и 28B и как описано подробнее ниже, узел 3006 питания может содержать контроллер 3016 управления питанием, который может быть выполнен с возможностью модуляции выходной мощности узла 3006 питания, например, для подачи первой выходной мощности на двигатель 3014 для продвижения разрезающего элемента, когда сменный узел 200 стержня соединен с узлом 14 рукоятки, и подачи второй выходной мощности для питания двигателя 3014 для продвижения разрезающего элемента, когда сменный узел 200 стержня соединен с узлом 14 рукоятки. Такая модуляция может быть преимущественной при предотвращении передачи избыточной энергии на двигатель 3014, превышающей требования сменного узла стержня, который соединен с узлом 14 рукоятки.
Узел 200 стержня может содержать PCBA 3031 стержня, который содержит контроллер 3022 узла стержня, который может связываться с контроллером 3016 управления питанием через интерфейс (например, интерфейс 3024 на ФИГ. 29), когда узел 200 стержня и узел 3006 питания соединены с узлом 14 рукоятки. Например, интерфейс может содержать первую часть 3025 интерфейса, которая может содержать один или более электрических соединителей для соединительного зацепления с соответствующими электрическими соединителями узла стержня, и вторую часть 3027 интерфейса, которая может содержать один или более электрических соединителей для соединительного зацепления с соответствующими электрическими соединителями узла питания для обеспечения электрической связи между контроллером 3022 узла стержня и контроллером 3016 управления питанием, когда узел 200 стержня и узел 3006 питания соединены с узлом 14 рукоятки. Один или более сигналов связи могут быть переданы через интерфейс для сообщения одного или более требований к питанию прикрепленного сменного узла 200 стержня контроллеру 3016 управления питанием. В ответ, контроллер 3016 управления питанием может модулировать выходную мощность батареи узла 3006 питания, как описано подробнее ниже, в соответствии с требованиями к питанию прикрепленного узла 200 стержня. В некоторых обстоятельствах, один или более электрических соединителей могут содержать переключатели, которые могут быть активированы после механического соединительного зацепления узла 14 рукоятки с узлом 200 стержня и/или узлом 3006 питания для обеспечения электрической связи между контроллером 3022 узла стержня и контроллером 3016 управления питанием.
В некоторых обстоятельствах интерфейс может способствовать передачи одного или более сигналов связи между контроллером 3016 управления питанием и контроллером 3022 узла стержня, например, за счет обеспечения маршрутизации таких сигналов связи через основной контроллер 3017, находящийся в узле 14 рукоятки. В других обстоятельствах интерфейс может обеспечивать непосредственную линию связи между контроллером 3016 управления питанием и контроллером 3022 узла стержня через узел 14 рукоятки, когда узел 200 стержня и узел 3006 питания соединены с узлом 14 рукоятки.
В одном примере основной микроконтроллер 3017 может представлять собой любой одноядерный или многоядерный процессор, такой как известный под торговым названием ARM Cortex от Texas Instruments. В одном примере хирургический инструмент 10 (ФИГ. 1-4) может содержать контроллер 3016 управления питанием, такой как, например, микроконтроллерная платформа обеспечения безопасности, содержащая два семейства микроконтроллеров, таких как TMS570 и RM4x, известные под торговым названием Hercules ARM Cortex R4, также от Texas Instruments. Тем не менее, могут использоваться другие подходящие эквиваленты микроконтроллеров и процессоров обеспечения безопасности, без ограничения. В одном примере процессор 2004 обеспечения безопасности (ФИГ. 21A) может быть специально разработан под приложения с особыми требованиями по безопасности IEC 61508 и ISO 26262, среди прочего, для обеспечения усовершенствованных интегрированных функций обеспечения безопасности, при этом обеспечивая настраиваемые технические характеристики, возможность подключения и хранения данных.
В некоторых примерах микроконтроллер 3017 может представлять собой, например, LM 4F230H5QR производства компании Texas Instruments. По меньшей мере в одном примере Texas Instruments LM4F230H5QR представляет собой процессорное ядро ARM Cortex-M4F, содержащее однотактную флеш-память на кристалле объемом 256 Кб или другую энергонезависимую память с частотой максимум 40 МГц, буфер предвыборки для повышения производительности выше 40 МГц, однотактную последовательную память с произвольным доступом (SRAM) объемом 32 Кб, внутреннее постоянное запоминающее устройство (ПЗУ) с загруженным программным обеспечением StellarisWare®, электрически стираемую программируемую постоянную память (ЭСППЗУ) объемом 2 Кб, один или более модулей широтно-импульсной модуляции (ШИМ), один или более аналогов импульсных датчиков положения (QEI), один или более 12-битных аналогово-цифровых преобразователей (АЦП) с 12 аналоговыми входными каналами, помимо других элементов, информацию о которых можно получить из паспорта изделия. Настоящее описание не должно быть ограничено в этом контексте.
Узел 3006 питания может содержать цепь управления питанием, которая может содержать контроллер 3016 управления питанием, модулятор 3038 мощности и цепь 3036 измерения тока. Цепь управления питанием может быть выполнена с возможностью модуляции выходной мощности батареи на основании требований к питанию узла 200 стержня, когда узел 200 стержня и узел 3006 питания соединены с узлом 14 рукоятки. Например, контроллер 3016 управления питанием может быть запрограммирован на управление модулятором 3038 выходной мощности узла 3006 питания, и цепь 3036 измерения тока может использоваться для контроля выходной мощности узла 3006 питания для обеспечения обратной связи с контроллером 3016 управления питанием в отношении выходной мощности батареи, вследствие чего контроллер 3016 управления питанием может регулировать выходную мощность узла 3006 питания для поддержания необходимого выходного значения.
Следует отметить, что каждый из контроллера 3016 управления питанием и/или контроллера 3022 узла стержня может содержать один или более процессоров и/или блоков памяти, в которых может храниться некоторое количество модулей программного обеспечения. Хотя некоторые модули и/или блоки хирургического инструмента 10 могут быть описаны в качестве примера, понятно, что может быть использовано большее или меньшее количество модулей и/или блоков. Кроме того, хотя различные примеры могут быть описаны в терминах модулей и/или блоков, чтобы облегчить описание, такие модули и/или блоки могут быть реализованы с помощью одного или большего количества компонентов аппаратных средств, например процессоров, цифровых сигнальных процессоров (ЦСП), программируемых логических устройств (ПЛУ), специализированных интегральных схем (СИС), схем, регистров и (или) компонентов программного обеспечения, например программ, подпрограмм, логических блоков и (или) комбинаций аппаратных компонентов и компонентов программного обеспечения.
В некоторых примерах хирургический инструмент 10 может содержать устройство 3042 вывода, которое может содержать одно или более устройств для предоставления сенсорной обратной связи для пользователя. Такие устройства могут содержать, например, визуальные устройства обратной связи (например, ЖК-дисплей, светодиодные индикаторы), звуковые устройства обратной связи (например, громкоговоритель, зуммер) или тактильные устройства обратной связи (например, тактильные приводы). В некоторых обстоятельствах устройство 3042 вывода может содержать дисплей 3043, который может быть включен в узел 14 рукоятки. Контроллер 3022 узла стержня и/или контроллер 3016 управления питанием могут обеспечивать обратную связь пользователю хирургического инструмента 10 через устройство 3042 вывода. Интерфейс (например, интерфейс 3024 по ФИГ. 29) может быть выполнен с возможностью соединения контроллера 3022 узла стержня и/или контроллера 3016 управления питанием с устройством 3042 вывода. Читателю будет понятно, что устройство 3042 вывода может, вместо этого, быть встроено в узел 3006 питания. В таких обстоятельствах связь между устройством 3042 вывода и контроллером 3022 узла стержня может быть реализована посредством интерфейса, когда узел 200 стержня соединен с узлом 14 рукоятки.
На ФИГ. 29 представлена блок-схема хирургического инструмента, показанного на ФИГ. 1, на которой изображены интерфейсы (совместно обозначенные 3024) между узлом 14 рукоятки и узлом 3006 питания, а также между узлом 14 рукоятки и сменным узлом 200 стержня. Как показано на ФИГ. 29, узел 3006 питания может содержать цепь 3034 управления питанием, которая может содержать контроллер 3016 управления питанием, модулятор 3038 мощности, цепь 3036 измерения тока и соединитель 3032 узла питания. Цепь 3034 управления питанием может быть выполнена с возможностью модуляции выходной мощности батареи 3007 на основании требований к питанию узла 200 стержня, когда узел 200 стержня и узел 3006 питания соединены с узлом 14 рукоятки. Например, контроллер 3016 управления питанием может быть запрограммирован на управление модулятором 3038 выходной мощности узла 3006 питания, и цепь 3036 измерения тока может использоваться для контроля выходной мощности узла 3006 питания для обеспечения обратной связи с контроллером 3016 управления питанием в отношении выходной мощности батареи 3007, вследствие чего контроллер 3016 управления питанием может регулировать выходную мощность узла 3006 питания для поддержания необходимого выходного значения. Соединитель 3032 узла питания выполнен с возможностью соединения с соединителем 3030 узла питания узла 14 рукоятки на интерфейсе 3027 для соединения узла 3006 питания с узлом 14 рукоятки.
Узел 200 стержня содержит контроллер 3022 узла стержня и соединитель 3028 узла стержня. Соединитель 3028 узла стержня выполнен с возможностью соединения с соединителем 3026 узла стержня узла 14 рукоятки на интерфейсе 3025 для соединения узла 200 стержня с узлом 14 рукоятки. Как показано на ФИГ. 29, узел 14 рукоятки может содержать основной микроконтроллер 3017 и устройство 3042 вывода, которое содержит дисплей 3043.
Как описано выше, различные компоненты могут взаимодействовать для способствования в управлении двигателем хирургического инструмента с электроприводом. Например, для хирургического инструмента 10 с электроприводом, датчик 2046 тока двигателя измеряет ток, подаваемый на двигатель 2048, и подает входной сигнал, указывающий измеренный ток, на основной процессор 2006, который, в свою очередь, подает сигналы широтно-импульсной модуляции на контроллер 2043 двигателя, который, в свою очередь, подает сигналы управления на выводы затвора нескольких FET 2044 для управления величиной тока, подаваемого на двигатель 2048 с течением времени от батареи 2008, а также направлением вращения двигателя 2048. Один датчик 2046 тока двигателя может использоваться для измерения тока, подаваемого на двигатель 2048, когда двигатель вращается в первом направлении, а другой датчик 2046 тока двигателя может использоваться для измерения тока, подаваемого на двигатель 2048, когда двигатель вращается во втором направлении. Совместно такие компоненты могут рассматриваться, как образующие часть цепи/системы управления или цепи/системы управления двигателем. В различных вариантах осуществления для измерения тока, подаваемого на двигатель 2048, датчик 2046 тока двигателя расположен для измерения тока, проходящего в схеме Н-мост (схема Н-мост содержит несколько FET 2044 и позволяет подавать напряжение на двигатель 2048 в любом направлении для обеспечения вращения двигателя 2048 в первом направлении и втором направлении), между двигателем 2048 и FET 2044, который расположен по схеме перед двигателем 2048. Измеренный ток может использоваться для управления двигателем 2048 и, в более широком смысле, для управления усилием, прикладываемым к пусковой приводной системе 80 хирургического инструмента 10 с электроприводом.
На практике относительно сложно разместить датчик 2046 тока двигателя так, чтобы измерить ток, проходящий по схеме Н-мост, между двигателем 2048 и FET 2044, который расположен по схеме перед двигателем 2048. Таким образом, в соответствии с различными вариантами осуществления желательно использовать ток, отличающийся от тока, измеряемого в схеме Н-мост, для управления двигателем 2048. Например, вместо использования тока, измеряемого в схеме Н-мост, как описано выше, для управления двигателем 2048 можно использовать значение температуры, интенсивности света или другого параметра, связанного с компонентом, соединенным со схемой Н-мост. При измерении параметра, отличного от тока в схеме Н-мост, на управление двигателем 2048 могут оказывать влияние аспекты рабочего цикла (например, рабочего цикла широтно-импульсной модуляции). Кроме того, для управления двигателем 2048 также можно использовать ток, электрически изолированный от схемы Н-мост.
на ФИГ. 30 представлено упрощенное изображение различных вариантов осуществления хирургического сшивающего инструмента 3100. В соответствии с различными вариантами осуществления хирургический сшивающий инструмент 3100 содержит приводную систему, электрический двигатель 3102, батарею 3104 и систему управления. Приводная система, которая не показана на ФИГ. 30 в целях упрощения, может быть подобной или идентичной пусковой приводной системе 80. Электрический двигатель 3102 механически соединен с приводной системой, и может быть подобен или идентичен двигателю 2048. Батарея 3104 является электрически подключаемой к электрическому двигателю 3102 и может быть подобной или идентичной батарее 2008. Система управления электрически соединена с электрическим двигателем 3102 и включает в себя схему Н-мост. Электрический двигатель 3102 является электрически подключаемым к батарее 3104 посредством схемы Н мост. В соответствии с различными вариантами осуществления схема Н-мост включает в себя первый резистивный нагревательный элемент 3106, второй резистивный нагревательный элемент 3108, первое переключающее устройство 3110, второе переключающее устройство 3112, третье переключающее устройство 3114 и четвертое переключающее устройство 3116. Первое, второе, третье и четвертое переключающие устройства 3110-3116 могут представлять собой любой подходящий тип переключающих устройств и могут быть подобны или идентичны нескольким FET 2044. Схема Н-мост также имеет высокую сторону и низкую сторону относительно электрического двигателя 3102. Высокая сторона содержит первое и второе плечи, причем первое переключающее устройство 3110 является частью первого плеча, а второе переключающее устройство 3112 является частью второго плеча, как известно из уровня техники. Низкая сторона включает в себя третье и четвертое плечи, причем третье переключающее устройство 3114 и второй резистивный нагревательный элемент 3108 являются частью третьего плеча, а четвертое переключающее устройство 3116 и первый резистивный нагревательный элемент 3106 являются частью четвертого плеча. Высокая сторона схемы Н-мост считается верхней стороной схемы Н-мост, а низкая сторона схемы Н-мост считается нижней стороной схемы Н-мост. В соответствии с другими вариантами осуществления первый и второй резистивные нагревательные элементы 3106, 3108 являются внешними по отношению к схемы Н-мост, но электрически соединены с ней.
Первый резистивный нагревательный элемент 3106 электрически последовательно соединен с четвертым переключающим устройством 3116 ниже четвертого переключающего устройства 3116. Первый резистивный нагревательный элемент 3106 может быть реализован в виде любого подходящего типа резистивного нагревательного элемента. Например, в соответствии с различными вариантами осуществления первый резистивный нагревательный элемент 3106 может быть реализован в виде резистивного провода, а резистивный провод может представлять собой любой подходящий тип резистивного провода. Например, в соответствии с различными вариантами осуществления резистивный провод включает в себя хромоникелевый сплав.
Аналогичным образом второй резистивный нагревательный элемент 3108 электрически последовательно соединен с третьим переключающим устройством 3114 ниже третьего переключающего устройства 3114. Второй резистивный нагревательный элемент 3108 может быть реализован в виде любого подходящего типа резистивного нагревательного элемента. Например, в соответствии с различными вариантами осуществления второй резистивный нагревательный элемент 3108 может быть реализован в виде резистивного провода, а резистивный провод может представлять собой любой подходящий тип резистивного провода. Например, в соответствии с различными вариантами осуществления резистивный провод включает в себя хромоникелевый сплав.
Первый и второй резистивные нагревательные элементы 3106, 3108 могут быть идентичными или различными и могут быть реализованы в виде любого подходящего типа резистивного нагревательного элемента. Например, в соответствии с различными вариантами осуществления первый и второй резистивные нагревательные элементы 3106, 3108 могут быть реализованы в виде резистивных проводов, а резистивные провода могут иметь одинаковые или разные значения сопротивления.
Система управления также включает в себя первый датчик температуры 3118 и второй датчик температуры 3120. Первый датчик температуры 3118 расположен в непосредственной близости от первого резистивного нагревательного элемента 3106, термически соединен с первым резистивным нагревательным элементом 3106 и выполнен с возможностью определения температуры первого резистивного нагревательного элемента 3106 и/или связанной с ним температуры. Первый датчик температуры 3118 может быть реализован в виде любого подходящего типа датчика температуры. Например, в соответствии с различными вариантами осуществления первый датчик температуры 3118 может быть реализован в виде термопары, термопреобразователя сопротивления, термистора, инфракрасного датчика и т. п.
Аналогичным образом второй датчик температуры 3120 расположен в непосредственной близости от второго резистивного нагревательного элемента 3108, термически соединен со вторым резистивным нагревательным элементом 3108 и выполнен с возможностью определения температуры второго резистивного нагревательного элемента 3108 и/или связанной с ним температуры. Второй датчик температуры 3120 может быть реализован в виде любого подходящего типа датчика температуры. Например, в соответствии с различными вариантами осуществления второй датчик температуры 3120 может быть реализован в виде термопары, термопреобразователя сопротивления, термистора, инфракрасного датчика и т. п.
При эксплуатации, когда первое и четвертое переключающие устройства 3110, 3116 «замкнуты», а второе и третье переключающие устройства 3112, 3114 «разомкнуты», электрический двигатель 3102 может потреблять ток от батареи 3104 и вращаться в первом направлении (например, в направлении, которое вызывает перемещение компонента приводной системы в дистальном направлении). В этом состоянии ток проходит от положительной клеммы батареи 3104 через первое переключающее устройство 3110, через электрический двигатель 3102, через четвертое переключающее устройство 3116, через первый резистивный нагревательный элемент 3106 и возвращается на отрицательную клемму батареи 3104. По мере прохождения тока через первый резистивный нагревательный элемент 3106 первый резистивный нагревательный элемент 3106 выделяет тепло. Первый датчик температуры 3118 определяет/измеряет температуру первого резистивного нагревательного элемента 3106 и/или температуру в непосредственной близости от него/связанную с ним. В соответствии с измеренной температурой первый датчик температуры 3118 может выводить сигнал, который указывает на величину тока, проходящего через первый резистивный нагревательный элемент 3106. Выходной сигнал от первого датчика температуры 3118 может быть входным сигналом для основного процессора 2006 для управления электрическим двигателем 3102, а, следовательно, и для управления усилием, прикладываемым к приводной системе хирургического сшивающего инструмента 3100, когда электрический двигатель 3102 работает в первом направлении.
Аналогично, когда второе и третье переключающие устройства 3112, 3114 «замкнуты» и первое и четвертое переключающие устройства 3110, 3116 «разомкнуты», электрический двигатель 3102 может потреблять ток от батареи 3104 и вращаться во втором направлении (например, направлении, которое вызывает втягивание компонента приводной системы в проксимальном направлении). В этом состоянии ток проходит от положительной клеммы батареи 3104 через второе переключающее устройство 3112, через электрический двигатель 3102, через третье переключающее устройство 3114, через второй резистивный нагревательный элемент 3108 и возвращается на отрицательную клемму батареи 3104. По мере прохождения тока через второй резистивный нагревательный элемент 3108 второй резистивный нагревательный элемент 3108 выделяет тепло. Второй датчик температуры 3120 определяет температуру второго резистивного нагревательного элемента 3108 и/или температуру в непосредственной близости от него/связанную с ним. В соответствии с измеренной температурой второй датчик температуры 3120 может выводить сигнал, который указывает на величину тока, проходящего через второй резистивный нагревательный элемент 3108. Выходной сигнал от второго датчика температуры 3120 может быть входным сигналом для основного процессора 2006 для управления электрическим двигателем 3102, а, следовательно, и для управления усилием, прикладываемым к приводной системе хирургического сшивающего инструмента 3100, когда электрический двигатель 3102 работает во втором направлении.
Несмотря на то что хирургический сшивающий инструмент 3100 показан на ФИГ. 30 как имеющий два резистивных нагревательных элемента 3106, 3108 (каждый на нижней стороне схемы Н-мост) и два датчика температуры 3118, 3120, расположенных в непосредственной близости от них, следует понимать, что в соответствии с другими вариантами осуществления хирургический сшивающий инструмент 3100 может включать в себя один резистивный нагревательный элемент, электрически соединенный либо с третьим плечом, либо с четвертым плечом схемы Н-мост, как описано выше в настоящем документе, и один датчик температуры, расположенный в непосредственной близости от него.
В соответствии с другими вариантами осуществления хирургического сшивающего инструмента 3100 вместо использования значения температуры, связанной с компонентом низкой стороны схемы Н-мост, для управления электрическим двигателем 3102 в хирургическом сшивающем инструменте 3100 может использоваться ток, указывающий на температуру, связанную с компонентом низкой стороны схемы Н-мост, который при этом является внешним по отношению к схемы Н-мост.
На ФИГ. 31 представлено упрощенное изображение различных вариантов осуществления хирургического сшивающего инструмента 3200. Хирургический сшивающий инструмент 3200 подобен хирургическому сшивающему инструменту 3100, но при этом отличается от него. В соответствии с различными вариантами осуществления хирургический сшивающий инструмент 3100 содержит приводную систему, электрический двигатель 3102, батарею 3104 и систему управления. Приводная система, которая не показана на ФИГ. 31 в целях упрощения, может быть подобна или идентична пусковой приводной системе 80. Электрический двигатель 3102 механически соединен с приводной системой, и может быть подобен или идентичен двигателю 2048. Батарея 3104 является электрически подключаемой к электрическому двигателю 3102 и может быть подобной или идентичной батарее 2008. Система управления электрически соединена с электрическим двигателем 3102 и включает в себя схему Н-мост. Электрический двигатель 3102 является электрически подключаемым к батарее 3104 посредством схемы Н-мост. В соответствии с различными вариантами осуществления схема Н-мост включает в себя первый резистивный нагревательный элемент 3206, второй резистивный нагревательный элемент 3208, первое переключающее устройство 3110, второе переключающее устройство 3112, третье переключающее устройство 3114 и четвертое переключающее устройство 3116. Первое, второе, третье и четвертое переключающие устройства 3110-3116 могут представлять собой любой подходящий тип переключающих устройств и могут быть подобны или идентичны нескольким FET 2044. Схема Н-мост также имеет высокую сторону и низкую сторону относительно электрического двигателя 3102. Высокая сторона содержит первое и второе плечи, причем первое переключающее устройство 3110 является частью первого плеча, а второе переключающее устройство 3112 является частью второго плеча, как известно из уровня техники. Низкая сторона включает в себя третье и четвертое плечи, причем третье переключающее устройство 3114 и второй резистивный нагревательный элемент 3208 являются частью третьего плеча, а четвертое переключающее устройство 3116 и первый резистивный нагревательный элемент 3206 являются частью четвертого плеча. Высокая сторона схемы Н-мост считается верхней стороной схемы Н-мост, а низкая сторона схемы Н-мост считается нижней стороной схемы Н-мост. В соответствии с другими вариантами осуществления первый и второй резистивные нагревательные элементы 3206, 3208 являются внешними по отношению к схемы Н-мост, но электрически соединены с нею.
Первый резистивный нагревательный элемент 3206 электрически последовательно соединен с четвертым переключающим устройством 3116 ниже четвертого переключающего устройства 3116. Первый резистивный нагревательный элемент 3206 может быть реализован в виде любого подходящего типа резистивного нагревательного элемента. Аналогичным образом второй резистивный нагревательный элемент 3208 электрически последовательно соединен с третьим переключающим устройством 3114 ниже третьего переключающего устройства 3114. Второй резистивный нагревательный элемент 3208 может быть реализован в виде любого подходящего типа резистивного нагревательного элемента. Первый и второй резистивные нагревательные элементы 3206, 3208 могут быть идентичными или различными и могут быть реализованы в виде любого подходящего типа резистивного нагревательного элемента. Например, в соответствии с различными вариантами осуществления первый и второй резистивные нагревательные элементы 3206, 3208 могут быть реализованы в виде резистивных проводов, а резистивные провода могут иметь одинаковые или разные значения сопротивления.
Система управления также включает в себя первый датчик температуры 3218, второй датчик температуры 3220, первую систему корреляции температуры 3222 и вторую систему корреляции температуры 3224. Первый датчик температуры 3218 расположен в непосредственной близости от первого резистивного нагревательного элемента 3206, термически соединен с первым резистивным нагревательным элементом 3206 и выполнен с возможностью определения температуры первого резистивного нагревательного элемента 3206 и/или связанной с ним температуры. Первый датчик температуры 3218 может быть реализован в виде любого подходящего типа датчика температуры. Например, в соответствии с различными вариантами осуществления первый датчик температуры 3218 может быть реализован в виде термопары, термопреобразователя сопротивления, термистора, инфракрасного датчика и т. п. Аналогичным образом второй датчик температуры 3220 расположен в непосредственной близости от второго резистивного нагревательного элемента 3208, термически соединен со вторым резистивным нагревательным элементом 3208 и выполнен с возможностью определения температуры первого резистивного нагревательного элемента 3208 и/или связанной с ним температуры. Второй датчик температуры 3220 может быть реализован в виде любого подходящего типа датчика температуры. Например, в соответствии с различными вариантами осуществления второй датчик температуры 3220 может быть реализован в виде термопары, термопреобразователя сопротивления, термистора, инфракрасного датчика и т. п.
Первая система корреляции температуры 3222 электрически соединена с первым датчиком температуры 3218 и включает в себя батарею 3226, контроллер 3228, третий резистивный нагревательный элемент 3230, третий датчик температуры 3232 и датчик тока 3234. Контроллер 3228 электрически соединен с первым датчиком температуры 3218 и третьим датчиком температуры 3230. Третий резистивный нагревательный элемент 3230 термически и электрически изолирован от первого резистивного нагревательного элемента 3206. Третий датчик температуры 3232 расположен в непосредственной близости от третьего резистивного нагревательного элемента 3230, термически соединен с третьим резистивным нагревательным элементом 3230 и выполнен с возможностью определения температуры третьего резистивного нагревательного элемента 3230 и/или связанной с ним температуры.
Аналогичным образом вторая система корреляции температуры 3224 электрически соединена со вторым датчиком температуры 3220 и включает в себя батарею 3236, контроллер 3238, четвертый резистивный нагревательный элемент 3240, четвертый датчик температуры 3242 и второй датчик тока 3244. Контроллер 3238 электрически соединен со вторым датчиком температуры 3220 и четвертым датчиком температуры 3242. Четвертый резистивный нагревательный элемент 3240 термически и электрически изолирован от второго резистивного нагревательного элемента 3208. Четвертый датчик температуры 3242 расположен в непосредственной близости от четвертого резистивного нагревательного элемента 3240, термически соединен с четвертым резистивным нагревательным элементом 3240 и выполнен с возможностью определения температуры четвертого резистивного нагревательного элемента 3240 и/или связанной с ним температуры.
При эксплуатации, когда первое и четвертое переключающие устройства 3110, 3116 «замкнуты», а второе и третье переключающие устройства 3112, 3114 «разомкнуты», электрический двигатель 3102 может потреблять ток от батареи 3104 и вращаться в первом направлении (например, в направлении, которое вызывает перемещение компонента приводной системы в дистальном направлении). В этом состоянии ток проходит от положительной клеммы батареи 3104 через первое переключающее устройство 3110, через электрический двигатель 3102, через четвертое переключающее устройство 3116, через первый резистивный нагревательный элемент 3206 и возвращается на отрицательную клемму батареи 3104. По мере прохождения тока через первый резистивный нагревательный элемент 3206 первый резистивный нагревательный элемент 3206 выделяет тепло. Первый датчик температуры 3218 определяет температуру первого резистивного нагревательного элемента 3206 и/или температуру в непосредственной близости от него/связанную с ним. В соответствии с измеренной температурой первый датчик температуры 3218 может выводить сигнал, который указывает на величину тока, проходящего через первый резистивный нагревательный элемент 3206. Выходной сигнал от первого датчика температуры 3218 может быть входным сигналом для контроллера 3228.
Работа контроллера 3228 обеспечивает потребление тока от батареи 3226 третьим резистивным нагревательным элементом 3230. По мере поступления тока от батареи 3226 к третьему резистивному нагревательному элементу 3230 ток может измеряться датчиком тока 3234. По мере прохождения тока через третий резистивный нагревательный элемент 3230 третий резистивный нагревательный элемент 3230 выделяет тепло. Третий датчик температуры 3232 определяет температуру третьего резистивного нагревательного элемента 3230 и/или температуру в непосредственной близости от него/связанную с ним. В соответствии с измеренной температурой третий датчик температуры 3232 может выводить сигнал, который указывает на величину тока, проходящего через третий резистивный нагревательный элемент 3230. Выходной сигнал от третьего датчика температуры 3232 может быть входным сигналом для контроллера 3228. Работа контроллера 3228, основанная на поступлении сигналов от первого и третьего датчиков температуры 3218, 3232, в достаточной мере обеспечивает потребление тока от батареи 3226 третьим резистивным нагревательным элементом 3230 таким образом, чтобы значения температуры, измеренные первым и третьим датчиками температуры 3218, 3230, были по существу равны. Когда значения температуры по существу равны, измеряемая датчиком тока 3234 сила тока, проходящего через третий резистивный нагревательный элемент 3230, либо пропорциональна, либо по существу равна силе тока, проходящего через первый резистивный нагревательный элемент 3206. Датчик тока 3234 может выводить сигнал, который указывает на величину тока, измеряемую датчиком тока 3234, на основной процессор 2006 для управления электрическим двигателем 3102, а, следовательно, и для управления усилием, прикладываемым к приводной системе хирургического сшивающего инструмента, когда электрический двигатель 3102 работает в первом направлении.
Аналогично, когда второе и третье переключающие устройства 3112, 3114 «замкнуты», а первое и четвертое переключающие устройства 3110, 3116 «разомкнуты», электрический двигатель 3102 может потреблять ток от батареи 3104 и вращаться во втором направлении (например, в направлении, которое приводит к втягиванию компонента приводной системы в проксимальном направлении). В этом состоянии ток проходит от положительной клеммы батареи 3104 через второе переключающее устройство 3112, через электрический двигатель 3102, через третье переключающее устройство 3114, через второй резистивный нагревательный элемент 3208 и возвращается на отрицательную клемму батареи 3104. По мере прохождения тока через второй резистивный нагревательный элемент 3208 второй резистивный нагревательный элемент 3208 выделяет тепло. Второй датчик температуры 3220 определяет температуру второго резистивного нагревательного элемента 3208 и/или температуру в непосредственной близости от него/связанную с ним. В соответствии с измеренной температурой второй датчик температуры 3220 может выводить сигнал, который указывает на величину тока, проходящего через второй резистивный нагревательный элемент 3208. Выходной сигнал от второго датчика температуры 3220 может быть входным сигналом для контроллера 3238.
Работа контроллера 3238 обеспечивает потребление тока от батареи 3236 четвертым резистивным нагревательным элементом 3240. По мере поступления тока от батареи 3236 к четвертому резистивному нагревательному элементу 3240 ток может измеряться датчиком тока 3244. По мере прохождения тока через четвертый резистивный нагревательный элемент 3240 четвертый резистивный нагревательный элемент 3240 выделяет тепло. Четвертый датчик температуры 3242 определяет температуру четвертого резистивного нагревательного элемента 3240 и/или температуру в непосредственной близости от него/связанную с ним. В соответствии с измеренной температурой четвертый датчик температуры 3242 может выводить сигнал, который указывает на величину тока, проходящего через четвертый резистивный нагревательный элемент 3240. Выходной сигнал от четвертого датчика температуры 3242 может быть входным сигналом для контроллера 3238. Работа контроллера 3238, основанная на поступлении сигналов от второго и четвертого датчиков температуры 3220, 3240, в достаточной мере обеспечивает потребление тока от батареи 3236 четвертым резистивным нагревательным элементом 3240 таким образом, чтобы значения температуры, измеренные вторым и четвертым датчиками температуры 3220, 3240, были по существу равны. Когда значения температуры по существу равны, измеряемая датчиком тока 3244 сила тока, проходящего через четвертый резистивный нагревательный элемент 3240, либо пропорциональна, либо по существу равна силе тока, проходящего через второй резистивный нагревательный элемент 3208. Датчик тока 3244 может выводить сигнал, который указывает на величину тока, измеряемую датчиком тока 3244, на основной процессор 2006 для управления электрическим двигателем 3102, а, следовательно, и для управления усилием, прикладываемым к приводной системе хирургического сшивающего инструмента, когда электрический двигатель 3102 работает во втором направлении.
В соответствии с другими вариантами осуществления хирургического сшивающего инструмента вместо использования измерения температуры или тока, связанного с измеряемой температурой, для управления электрическим двигателем 3102 может применяться измерение интенсивности светоизлучающего диода.
На ФИГ. 32 представлено упрощенное изображение различных вариантов осуществления хирургического сшивающего инструмента 3300. В соответствии с различными вариантами осуществления хирургический сшивающий инструмент 3300 включает в себя приводную систему, электрический двигатель 3102, батарею 3104 и систему управления. Приводная система, которая не показана на ФИГ. 32 в целях упрощения, может быть подобна или идентична пусковой приводной системе 80. Электрический двигатель 3102 механически соединен с приводной системой, и может быть подобен или идентичен двигателю 2048. Батарея 3104 является электрически подключаемой к электрическому двигателю 3102 и может быть подобной или идентичной батарее 2008. Система управления электрически соединена с электрическим двигателем 3102 и включает в себя схему Н-мост. Электрический двигатель 3102 является электрически подключаемым к батарее 3104 посредством схемы Н-мост. В соответствии с различными вариантами осуществления схема Н-мост включает в себя первый светоизлучающий диод 3306, второй светоизлучающий диод 3308, первое переключающее устройство 3110, второе переключающее устройство 3112, третье переключающее устройство 3114 и четвертое переключающее устройство 3116. Первое, второе, третье и четвертое переключающие устройства 3110-3116 могут представлять собой любой подходящий тип переключающих устройств и могут быть подобны или идентичны нескольким FET 2044. Схема Н-мост также имеет высокую сторону и низкую сторону относительно электрического двигателя 3102. Высокая сторона содержит первое и второе плечи, причем первое переключающее устройство 3110 является частью первого плеча, а второе переключающее устройство 3112 является частью второго плеча, как известно из уровня техники. Низкая сторона включает в себя третье и четвертое плечи, причем третье переключающее устройство 3114 и светоизлучающий диод 3308 являются частью третьего плеча, а четвертое переключающее устройство 3116 и первый светоизлучающий диод 3306 являются частью четвертого плеча. Высокая сторона схемы Н-мост считается верхней стороной схемы Н-мост, а низкая сторона схемы Н-мост считается нижней стороной схемы Н-мост. В соответствии с другими вариантами осуществления первый и второй светоизлучающие диоды 3306, 3308 являются внешними по отношению к схемы Н-мост, но электрически соединены с нею.
Первый светоизлучающий диод 3306 электрически последовательно соединен с четвертым переключающим устройством 3116 ниже четвертого переключающего устройства 3116 и включает в себя два вывода, или две клеммы, - анод и катод. Первый светоизлучающий диод 3306 может быть реализован в виде любого подходящего типа светоизлучающего диода. Например, в соответствии с различными вариантами осуществления первый светоизлучающий диод 3306 может быть реализован в виде синего, зеленого, красного и т. п. светоизлучающего диода.
Аналогичным образом второй светоизлучающий диод 3308 электрически последовательно соединен с третьим переключающим устройством 3114 ниже третьего переключающего устройства 3114 и включает в себя два вывода, или две клеммы, - анод и катод. Второй светоизлучающий диод 3308 может быть реализован в виде любого подходящего типа светоизлучающего диода. Например, в соответствии с различными вариантами осуществления первый светоизлучающий диод 3306 может быть реализован в виде синего, зеленого, красного и т. п. светоизлучающего диода.
Первый и второй светоизлучающие диоды 3306, 3308 могут быть идентичными или различными и могут быть реализованы в виде любого подходящего типа светоизлучающего диода. Например, в соответствии с различными вариантами осуществления длина волны (цвет) света, излучаемого первым светоизлучающим диодом 3306, может отличаться от длины волны (цвета) света, излучаемого вторым светоизлучающим диодом 3308.
Система управления также включает в себя первый датчик интенсивности света 3318 и второй датчик интенсивности света 3320. Первый датчик интенсивности света 3318 расположен в непосредственной близости от первого светоизлучающего диода 3306, оптически соединен с первым светоизлучающим диодом 3306 и выполнен с возможностью определения интенсивности света, испускаемым первым светоизлучающим диодом 3306. Первый датчик интенсивности света 3318 может быть реализован в виде любого подходящего типа датчика интенсивности света. Например, в соответствии с различными вариантами осуществления первый датчик интенсивности света 3118 может быть реализован в виде фотонного детектора.
Аналогичным образом второй датчик интенсивности света 3320 расположен в непосредственной близости от второго светоизлучающего диода 3308, оптически соединен со вторым светоизлучающим диодом 3308 и выполнен с возможностью определения интенсивности света, испускаемым вторым светоизлучающим диодом 3308. Второй датчик интенсивности света 3320 может быть реализован в виде любого подходящего типа датчика интенсивности света. Например, в соответствии с различными вариантами осуществления второй датчик интенсивности света 3320 может быть реализован в виде фотонного детектора.
Первый и второй датчики интенсивности света 3318, 3320 могут быть идентичными или различными. В соответствии с различными вариантами осуществления для измерения интенсивности света, излучаемого первым и вторым светоизлучающими диодами 3306, 3308, можно установить и использовать один датчик интенсивности света (например, первый или второй датчик интенсивности света).
При эксплуатации, когда первое и четвертое переключающие устройства 3110, 3116 «замкнуты», а второе и третье переключающие устройства 3112, 3114 «разомкнуты», электрический двигатель 3102 может потреблять ток от батареи 3104 и вращаться в первом направлении (например, в направлении, которое вызывает перемещение компонента приводной системы в дистальном направлении). В этом состоянии ток проходит от положительной клеммы батареи 3104 через первое переключающее устройство 3110, через электрический двигатель 3102, через четвертое переключающее устройство 3116, через первый светоизлучающий диод 3306 и возвращается на отрицательную клемму батареи 3104. По мере того как напряжение подается на два вывода первого светоизлучающего диода 3306, рекомбинация электронов с электронными дырками внутри первого светоизлучающего диода 3306 приводит к высвобождению энергии в форме фотонов, которые распространяют свет. Другими словами, первый светоизлучающий диод 3306 излучает свет. Интенсивность излучаемого света определяется/измеряется первым датчиком интенсивности света 3318. В соответствии с определенной/измеренной интенсивностью излучаемого света, первый датчик интенсивности света 3318 может выводить сигнал, который указывает на интенсивность света, излучаемого первым светоизлучающим диодом 3306. Выходной сигнал от первого датчика интенсивности света 3318 может быть входным сигналом для основного процессора 2006 для управления электрическим двигателем 3102, а, следовательно, и для управления усилием, прикладываемым к приводной системе хирургического сшивающего инструмента, когда электрический двигатель 3102 работает в первом направлении.
Аналогично, когда второе и третье переключающие устройства 3112, 3114 «замкнуты» и первое и четвертое переключающие устройства 3110, 3116 «разомкнуты», электрический двигатель 3102 может потреблять ток от батареи 3104 и вращаться во втором направлении (например, направлении, которое вызывает втягивание компонента приводной системы в проксимальном направлении). В этом состоянии ток проходит от положительной клеммы батареи 3104 через второе переключающее устройство 3112, через электрический двигатель 3102, через третье переключающее устройство 3114, через второй светоизлучающий диод 3308 и возвращается на отрицательную клемму батареи 3104. По мере того как напряжение подается на два вывода второго светоизлучающего диода 3308, второй светоизлучающий диод 3308 излучает свет. Интенсивность излучаемого света определяется/измеряется вторым датчиком интенсивности света 3320. В соответствии с определенной/измеренной интенсивностью излучаемого света, второй датчик интенсивности света 3320 может выводить сигнал, который указывает на интенсивность света, излучаемого вторым светоизлучающим диодом 3308. Выходной сигнал от второго датчика интенсивности света 3320 может быть входным сигналом для основного процессора 2006 для управления электрическим двигателем 3102, а, следовательно, и для управления усилием, прикладываемым к приводной системе хирургического сшивающего инструмента, когда электрический двигатель 3102 работает во втором направлении.
Несмотря на то что хирургический сшивающий инструмент 3300 показан на ФИГ. 30 как имеющий два светоизлучающих диода 3306, 3308 (каждый на нижней стороне схемы Н-мост) и два датчика интенсивности света 3318, 3320, расположенных в непосредственной близости от них, следует понимать, что в соответствии с другими вариантами осуществления хирургический сшивающий инструмент 3300 может включать в себя один светоизлучающий диод, электрически соединенный либо с третьим плечом, либо с четвертым плечом схемы Н-мост, как описано выше в настоящем документе, и один датчик интенсивности света, расположенный в непосредственной близости от него.
Примеры
Пример 1. Предлагается хирургический сшивающий инструмент. Хирургический сшивающий инструмент содержит приводную систему, электрический двигатель, механически соединенный с приводной системой, батарею, электрически подключаемую к электрическому двигателю, и систему управления, электрически соединенную с электрическим двигателем. Система управления содержит схему Н-мост и датчик температуры. Схема Н-мост содержит высокую и низкую стороны, причем низкая сторона схемы Н-мост содержит первое и второе переключающие устройства и резистивный нагревательный элемент, электрически соединенный последовательно с первым переключающим устройством. Датчик температуры расположен в непосредственной близости от резистивного нагревательного элемента. Система управления выполнена с возможностью управления усилием, прикладываемым к приводной системе, на основании значения температуры, связанного с резистивным нагревательным элементом и определяемого датчиком температуры.
Пример 2. Хирургический сшивающий инструмент по примеру 1, отличающийся тем, что резистивный нагревательный элемент содержит резистивный провод.
Пример 3. Хирургический сшивающий инструмент по примеру 2, в котором резистивный провод содержит хромоникелевый сплав.
Пример 4. Хирургический сшивающий инструмент по примерам 1, 2 или 3, в котором датчик температуры содержит одно из следующих устройств: термопара, термопреобразователь сопротивления, термистор и инфракрасный датчик.
Пример 5. Хирургический сшивающий инструмент по примерам 1, 2, 3 или 4, дополнительно содержащий второй резистивный нагревательный элемент, электрически соединенный последовательно со вторым переключающим устройством, и второй датчик температуры, расположенный в непосредственной близости от второго резистивного нагревательного элемента, причем система управления дополнительно выполнена с возможностью управления вторым усилием, прикладываемым к приводной системе, на основании второго значения температуры, связанного со вторым резистивным нагревательным элементом и определяемого вторым датчиком температуры.
Пример 6. Хирургический сшивающий инструмент по примеру 5, отличающийся тем, второй нагревательный элемент содержит резистивный провод.
Пример 7. Хирургический сшивающий инструмент по примеру 6, в котором резистивный провод содержит хромоникелевый сплав.
Пример 8. Хирургический сшивающий инструмент по примеру 5, в котором второй датчик температуры содержит одно из следующих устройств: термопара, термопреобразователь сопротивления, термистор и инфракрасный датчик.
Пример 9. Предлагается хирургический сшивающий инструмент. Хирургический сшивающий инструмент содержит приводную систему, электрический двигатель, механически соединенный с приводной системой, батарею, электрически подключаемую к электрическому двигателю, и систему управления, электрически соединенную с электрическим двигателем. Система управления содержит схему Н-мост, датчик температуры и систему корреляции температуры. Схема Н-мост содержит высокую и низкую стороны, причем низкая сторона схемы Н-мост содержит первое и второе переключающие устройства и резистивный нагревательный элемент, электрически соединенный последовательно с первым переключающим устройством. Датчик температуры термически соединен с резистивным нагревательным элементом. Система корреляции температуры электрически соединена с датчиком температуры. Система управления выполнена с возможностью управления усилием, прикладываемым к приводной системе, на основании значения силы тока, измеряемого в системе корреляции температуры.
Пример 10. Хирургический сшивающий инструмент по примеру 9, в котором датчик температуры содержит одно из следующих устройств: термопара, термопреобразователь сопротивления, термистор и инфракрасный датчик.
Пример 11. Хирургический сшивающий инструмент по примерам 9 или 10, в котором система корреляции температуры содержит контроллер, второй резистивный нагревательный элемент, термически и электрически изолированный от резистивного нагревательного элемента, второй датчик температуры, термически соединенный со вторым резистивным нагревательным элементом и электрически соединенный с контроллером, и датчик, выполненный с возможностью измерения тока.
Пример 12. Хирургический сшивающий инструмент по примеру 11, в котором контроллер электрически соединен с датчиком температуры.
Пример 13. Хирургический сшивающий инструмент по примеру 11, в котором система корреляции температуры выполнена с возможностью возбуждения тока, измеряемого в системе корреляции температуры, через второй резистивный нагревательный элемент, величина которого пропорциональна величине второго тока, одновременно проходящего через резистивный нагревательный элемент.
Пример 14. Хирургический сшивающий инструмент по примеру 11, в котором система корреляции температуры выполнена с возможностью возбуждения тока, измеряемого в системе корреляции температуры, через второй резистивный нагревательный элемент, величина которого эквивалентна величине второго тока, одновременно проходящего через резистивный нагревательный элемент.
Пример 15. Хирургический сшивающий инструмент по примеру 11, в котором система управления дополнительно содержит третий резистивный нагревательный элемент, электрически соединенный последовательно со вторым переключающим устройством, третьим датчиком температуры, термически соединенным с третьим резистивным нагревательным элементом, и вторую систему корреляции температуры, электрически соединенную с третьим датчиком температуры, причем система управления дополнительно выполнена с возможностью управления вторым усилием, прикладываемым к приводной системе, на основании второго значения силы тока, измеряемого во второй системе корреляции температуры.
Пример 16. Предлагается хирургический сшивающий инструмент. Хирургический сшивающий инструмент содержит приводную систему, электрический двигатель, механически соединенный с приводной системой, батарею, электрически подключаемую к электрическому двигателю, и систему управления, электрически соединенную с электрическим двигателем. Система управления содержит схему Н-мост и датчик интенсивности света. Схема Н-мост содержит высокую и низкую стороны, причем низкая сторона схемы Н-мост содержит первое и второе переключающие устройства и светоизлучающий диод, электрически соединенный последовательно с первым переключающим устройством. Датчик интенсивности света оптически соединен с светоизлучающим диодом. Система управления выполнена с возможностью управления усилием, прикладываемым к приводной системе, на основании значения интенсивности света, излучаемого светоизлучающим диодом, определяемого датчиком интенсивности света.
Пример 17. Хирургический сшивающий инструмент по примеру 16, в котором датчик интенсивности света содержит фотонный детектор.
Пример 18. Хирургический сшивающий инструмент по примерам 16 или 17, дополнительно содержащий второй светоизлучающий диод, электрически соединенный последовательно со вторым переключающим устройством.
Пример 19. Хирургический сшивающий инструмент по примерам 16, 17 или 18, дополнительно содержащий второй датчик интенсивности света, оптически соединенный со вторым светоизлучающим диодом, причем система управления дополнительно выполнена с возможностью управления вторым усилием, прикладываемым к приводной системе, на основании второго значения интенсивности света, излучаемого вторым светоизлучающим диодом, определяемого вторым датчиком интенсивности света.
Пример 20. Хирургический сшивающий инструмент по примеру 19, в котором второй датчик интенсивности света содержит фотонный детектор.
Пример 21. Предлагается хирургический сшивающий инструмент. Хирургический сшивающий инструмент содержит приводную систему, электрический двигатель, механически соединенный с приводной системой, батарею, электрически подключаемую к электрическому двигателю, и систему управления, электрически соединенную с электрическим двигателем. Система управления содержит схему Н-мост и устройство, электрически соединенное со схемой Н-мост. Схема Н-мост содержит высокую и низкую стороны, причем низкая сторона схемы Н-мост содержит первое плечо, содержащее первое переключающее устройство, и второе плечо, содержащее второе переключающее устройство. Параметр, связанный с устройством, электрически соединенным со схемой Н-мост, изменяется в зависимости от тока, проходящего через первое плечо схемы Н-мост. Система управления выполнена с возможностью управления усилием, прикладываемым к приводной системе, на основании измерения данного параметра.
Полное описание:
патента США № 5,403,312, озаглавленного ELECTROSURGICAL HEMOSTATIC DEVICE, выданного 4 апреля 1995 г.;
патента США № 7,000,818, озаглавленного SURGICAL STAPLING INSTRUMENT HAVING SEPARATE DISTINCT CLOSING AND FIRING SYSTEMS, выданного 21 февраля 2006 г.;
патента США № 7,422,139, озаглавленного MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK, выданного 9 сентября 2008 г.;
патента США № 7,464,849, озаглавленного ELECTRO-MECHANICAL SURGICAL INSTRUMENT WITH CLOSURE SYSTEM AND ANVIL ALIGNMENT COMPONENTS, выданного 16 декабря 2008 г.;
патента США № 7,670,334, озаглавленного SURGICAL INSTRUMENT HAVING AN ARTICULATING END EFFECTOR, выданного 2 марта 2010 г.;
патента США № 7,753,245, озаглавленного SURGICAL STAPLING INSTRUMENTS, выданного 13 июля 2010 г.;
патента США № 8,393,514, озаглавленного SELECTIVELY ORIENTABLE IMPLANTABLE FASTENER CARTRIDGE, выданного 12 марта 2013 г.;
заявки на патент США № 11/343803, озаглавленной SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES; в настоящее время патент США № 7,845,537;
заявки на патент США № 12/031,573, озаглавленной SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING RF ELECTRODES, поданной 14 февраля 2008 г.;
заявки на патент США № 12/031,873, озаглавленной END EFFECTORS FOR A SURGICAL CUTTING AND STAPLING INSTRUMENT, поданной 15 февраля 2008 г., в настоящее время патент США № 7,980,443;
заявки на патент США № 12/235,782, озаглавленной MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT, в настоящее время патент США № 8210411;
заявки на патент США № 12/249,117, озаглавленной POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLY RETRACTABLE FIRING SYSTEM, в настоящее время патент США № 8608045;
заявки на патент США № 12/647,100, озаглавленной MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT WITH ELECTRIC ACTUATOR DIRECTIONAL CONTROL ASSEMBLY, поданной 24 декабря 2009 г. в настоящее время патент США № 8,220,688;
заявки на патент США № 12/893,461, озаглавленной STAPLE CARTRIDGE, поданной 29 сентября 2012 г., в настоящее время патент США № 8,733,613;
заявки на патент США № 13/036,647, озаглавленной SURGICAL STAPLING INSTRUMENT, поданной 28 февраля 2011 г., в настоящее время патент США № 8,561,870;
заявки на патент США № 13/118,241, озаглавленной SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS, в настоящее время патент США № 9072535;
заявка на патент США № 13/524 049, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE; поданной 15 июня 2012 г.; в настоящее время патента США № 9,101,358;
заявки на патент США № 13/800,025, озаглавленной STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданной 13 марта 2013 г., в настоящее время публикация заявки на патент США № 2014/0263551;
заявки на патент США № 13/800,067, озаглавленной STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданной 13 марта 2013 г., в настоящее время публикации заявки на патент США № 2014/0263552;
опубликованной заявки на патент США № 2007/0175955, озаглавленной SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISM, поданной 31 января 2006 г.; и
опубликованной заявки на патент США № 2010/0264194, озаглавленной SURGICAL STAPLING INSTRUMENT WITH AN ARTICULATABLE END EFFECTOR, поданной 22 апреля 2010 г., в настоящее время патент США № 8,308,040; включены в настоящий документ путем ссылки.
Несмотря на то, что в настоящем документе описаны различные варианты осуществления изделий в их связи с определенными раскрытыми вариантами осуществления, в отношении изделия могут быть реализованы различные модификации и изменения. Также для некоторых компонентов, для которых раскрыты материалы, можно применять другие материалы. Кроме того, в соответствии с различными вариантами осуществления один компонент может быть заменен несколькими компонентами, а несколько компонентов - одним компонентом (для выполнения определенных функций). Представленное выше описание и приложенная формула изобретения охватывают все указанные изменения и дополнения.
Устройства, описанные в настоящем документе, могут быть выполнены с возможностью утилизации после однократного применения или они могут быть выполнены с возможностью применения множество раз. Однако в любом случае устройство можно восстановить для повторного применения после, по меньшей мере, одного применения. Восстановление может включать в себя любую комбинацию этапов разборки устройства, последующей очистки или замены конкретных частей и последующей повторной сборки. В частности, устройство можно разобрать и любое число конкретных деталей или частей устройства можно селективно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей устройство можно снова собрать для последующего применения либо в мастерской по восстановлению, либо силами хирургической бригады непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что для восстановления устройства можно использовать различные методики разборки, очистки, замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Только в качестве примера, описанные в настоящем документе версии могут пройти обработку до операции. Во-первых, новый или использованный инструмент может быть получен и при необходимости обработан. Затем инструмент можно стерилизовать. Согласно одному способу стерилизации инструмент помещают в закрытый и герметичный контейнер, например пластиковый пакет или пакет (доступный в продаже от компании E. I. du Pont de Nemours and Company). Затем контейнер с инструментом можно поместить в поле действия излучения, способного проникнуть в контейнер, такого как гамма-излучение, рентгеновское излучение или пучок быстрых электронов. Излучение может убить бактерии на поверхности инструмента и в контейнере. После этого стерилизованный инструмент можно хранить в стерильном контейнере. Герметичный контейнер может держать инструмент стерильным, пока не возникнет необходимость его использования в медицинском учреждении. Устройство также можно стерилизовать с применением любой другой методики, известной в данной области, включая, без ограничений, бета- или гамма-излучение, этиленоксид, плазму пероксида или пар.
Хотя настоящее изобретение описано как имеющее примеры конфигураций, настоящее изобретение можно дополнительно модифицировать в пределах сущности и объема описания. Следовательно, предполагается, что настоящая заявка охватывает все возможные вариации, способы применения или адаптации изобретения с применением его общих принципов.
Любой патент, публикация или другой материал описания, полностью или частично, который указан как включенный в настоящий документ путем ссылки, включен в настоящий документ только в той степени, в какой включенный материал не противоречит существующим определениям, положениям и другому материалу описания, представленному в настоящем описании. Таким образом, описание, в прямой форме изложенное в настоящем документе, в той мере, в которой это необходимо, превалирует над любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, указанный как включенный в настоящий документ путем ссылки, но противоречащий существующим определениям, положениям или другим материалам описания, изложенным в настоящем документе, будет включен только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Реферат
Изобретение относится к области электротехники, в частности к хирургическим инструментам. Технический результат заключается в обеспечении эффективного применения хирургических систем с роботизированным управлением. Достигается тем, что хирургический сшивающий инструмент содержит приводную систему, электрический двигатель, батарею и систему управления. Электрический двигатель механически соединен с приводной системой. Батарея является электрически подключаемой к электрическому двигателю. Система управления электрически соединена с электрическим двигателем и включает в себя схему Н-мост и датчик температуры. Схема Н-мост включает в себя высокую сторону и низкую сторону. Низкая сторона схемы Н-мост включает в себя первое и второе переключающие устройства и резистивный нагревательный элемент, электрически соединенный последовательно с первым переключающим устройством. Датчик температуры расположен в непосредственной близости от резистивного нагревательного элемента. Система управления выполнена с возможностью управления усилием, прикладываемым к приводной системе, на основании значения температуры, связанного с резистивным нагревательным элементом и определяемого датчиком температуры. 4 н. и 17 з.п. ф-лы, 35 ил.
Формула
Документы, цитированные в отчёте о поиске
Моторизованный хирургический инструмент
Комментарии