Моторизованный хирургический инструмент - RU2532300C2
Код документа: RU2532300C2
Чертежи
Описание
УРОВЕНЬ ТЕХНИКИ
Хирургические сшивающие скобками аппараты, относящиеся к известному уровню техники, применялись для одновременного выполнения продольного рассечения в ткани и наложения рядов скобок на противоположные стороны рассечения. Такие инструменты обычно содержат пару согласованно действующих зажимных элементов, которые, если инструмент предназначен для эндоскопического или лапароскопического применения, способны проходить по проходному каналу канюли. Один из зажимных элементов вмещает кассету для скобок, содержащую, по меньшей мере, два поперечно разнесенных ряда скобок. Другой зажимной элемент образует упор, содержащий скобкоформирующие выемки, совмещенные с рядами скобок в кассете. Такие инструменты обычно содержат множество возвратно-поступательно перемещающихся клиньев, которые, при приведении в движение в дистальном направлении, проходят сквозь проходы в кассете для скобок и входят в контакт с ведущими элементами, служащими опорой для скобок, для выстреливания скобок к упору.
Пример хирургического сшивающего скобками аппарата, подходящего для эндоскопического применения, описан в опубликованной заявке на патент США № 2004/0232196 A1, «Surgical stapling instrument having separate distinct closing and firing systems», описание которой целиком включено в настоящее описание посредством ссылки. При применении врач может смыкать зажимные элементы сшивающего скобками аппарата на ткани для расположения ткани перед выстреливанием. После того как врач определил, что зажимные элементы правильно захватывают ткань, врач может осуществлять выстреливание из сшивающего скобками аппарата и, тем самым, разрезать и сшивать скобками ткань. Одновременные действия по разрезанию и сшиванию скобками исключают осложнения, которые могут возникать при последовательном выполнении данных действий разными хирургическими приспособлениями, которые, соответственно, только режут или сшивают скобками.
Хирургические режущие и скрепляющие инструменты с приводом от электродвигателя, в которых двигатель приводит в действие режущий инструмент, также относятся к известному уровню техники и описаны, например, в опубликованной заявке на патент США № 2007/0175962 A1, «Motor-driven surgical cutting and fastening instrument with tactile position feedback», которая включена в настоящее описание посредством ссылки. В упомянутом ссылочном материале для электрического питания электродвигателя предложено применение батареи в рукоятке.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним общим аспектом, варианты осуществления настоящего изобретения относятся к моторизованным хирургическим инструментам. Инструменты могут быть эндоскопическими инструментами, например эндоскопическими режущими инструментами, или циркулярными режущими инструментами, или лапароскопическими инструментами. Инструменты могут включать в состав скобки и/или RF (высокочастотные) электроды для скрепления ткани, зажатой в концевом эффекторе.
Несколько вариантов осуществления, описанных в настоящей заявке, относятся к электроприводным инструментам с батарейным питанием. В одном варианте осуществления инструмент содержит устройство накопления заряда, отдельное от батареи, которое обеспечивает подачу дополнительной мощности в электродвигатель, при необходимости. Устройство накопления заряда может первоначально заряжаться от батареи. Затем его можно отсоединить до времени, когда потребуется дополнительная мощность от устройства накопления заряда. При этом устройство накопления заряда включается последовательно с батареей для обеспечения дополнительной мощности в электродвигатель.
В другом варианте осуществления электродвигатель может содержать, по меньшей мере, две обмотки. В одном режиме работы обмотки соединены последовательно, и в другом режиме работы обмотки соединены параллельно. Когда обмотки соединены последовательно, электродвигатель может выдавать высокие обороты при низком крутящем моменте. Когда обмотки соединены параллельно, электродвигатель может выдавать низкие обороты при низком крутящем моменте. При этом, например, электродвигатель может обеспечивать оба режима работы, без необходимости применения в инструменте нескольких электродвигателей.
В еще одном варианте осуществления инструмента применяется сменный (возможно, подзаряжаемый) комплект батарей для электрического питания электродвигателя. Комплект батарей может содержать множество батарейных элементов. Первый набор батарейных элементов может быть соединен последовательно в комплекте батарей, и второй набор батарейных элементов может быть соединен последовательно в комплекте батарей, но в комплекте батарей первый набор не соединен последовательно со вторым набором. В предпочтительно варианте, инструмент может содержать батарейный элемент, подсоединяемый, например, в рукоятке, который подключает первый набор последовательно со вторым набором, когда комплект батарей установлен или размещен в инструменте.
Упомянутые и другие преимущества настоящего изобретения очевидны из нижеследующего описания.
ФИГУРЫ
Различные варианты осуществления настоящего изобретения описаны в настоящей заявке на примерах и в связи с нижеследующими фигурами, на которых:
Фиг.1 и 2 - виды в перспективе хирургического режущего и скрепляющего инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.3-5 - покомпонентное изображение концевого эффектора и вала инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
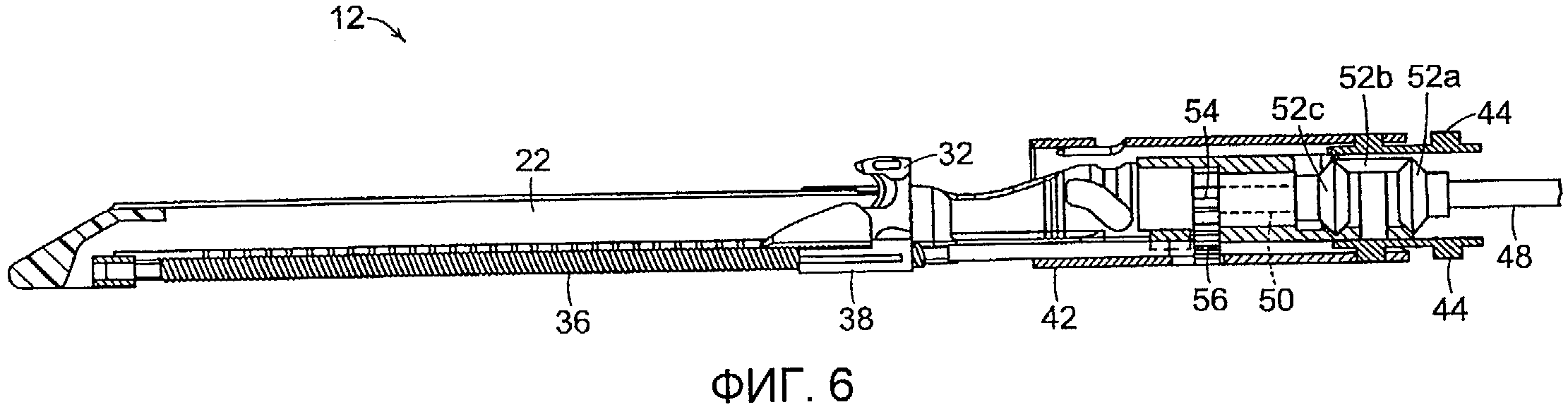
Фиг.6 - вид сбоку концевого эффектора в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.7 - покомпонентное изображение рукоятки инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
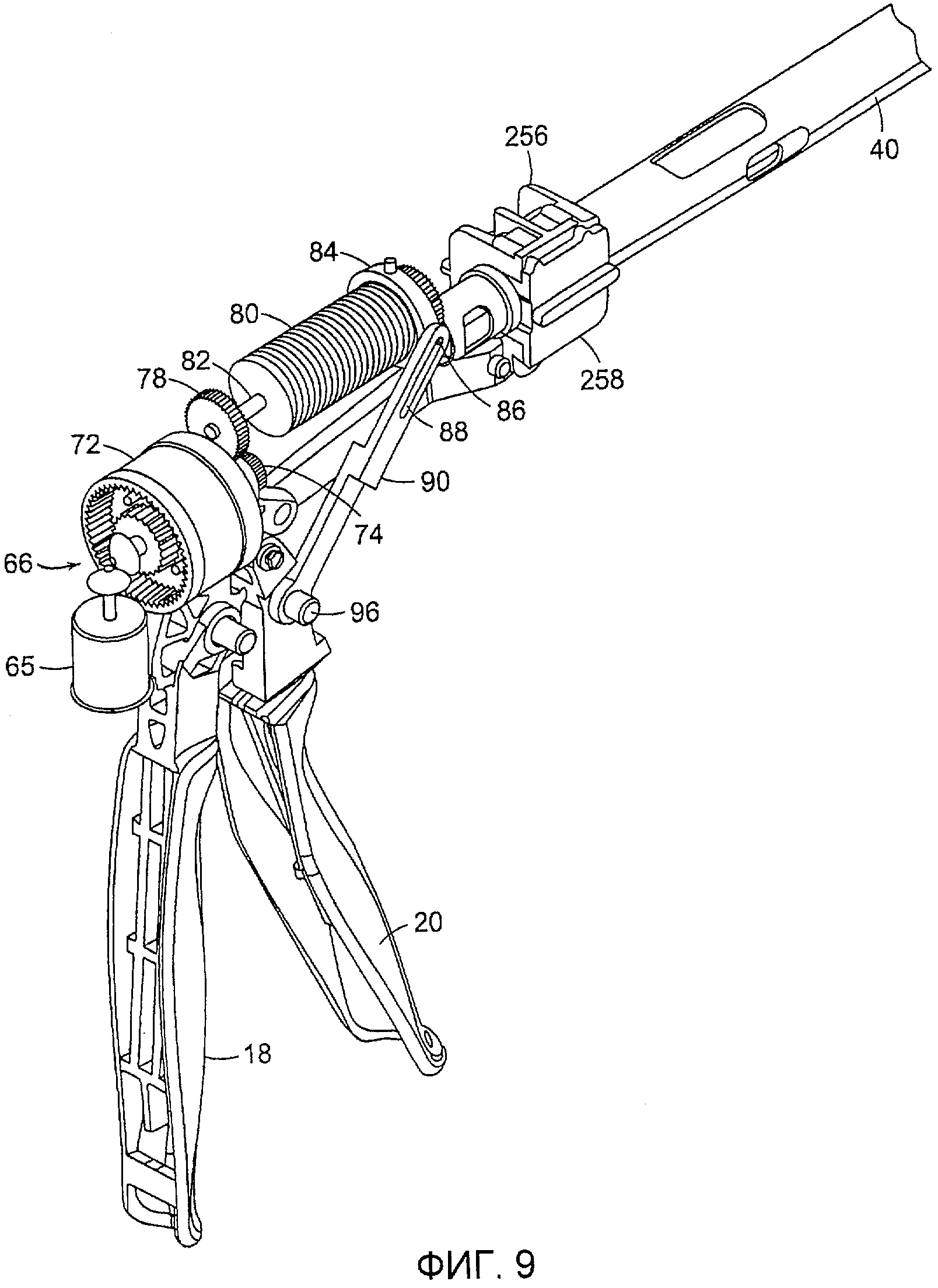
Фиг.8 и 9 - частичные виды в перспективе рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
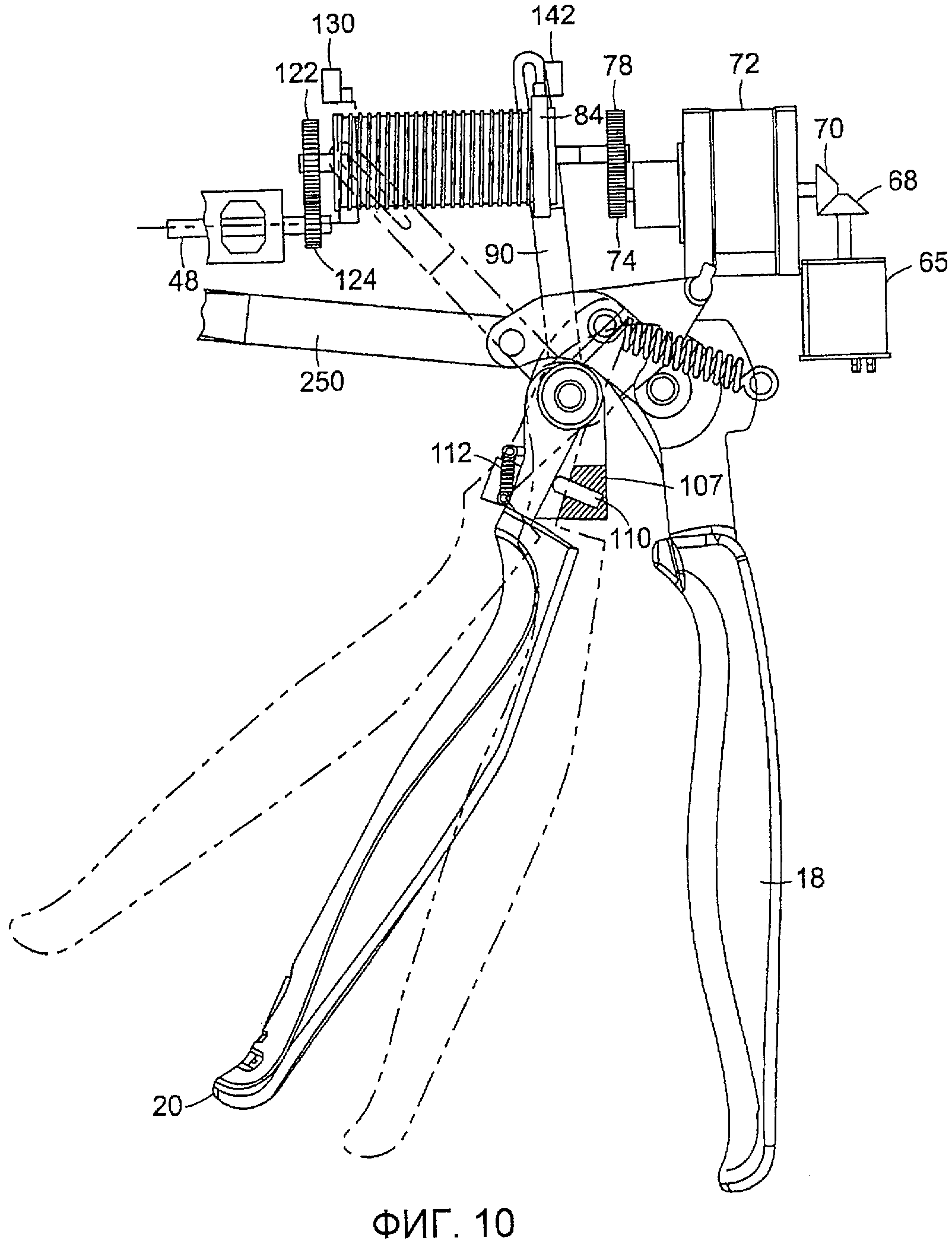
Фиг.10 - вид сбоку рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
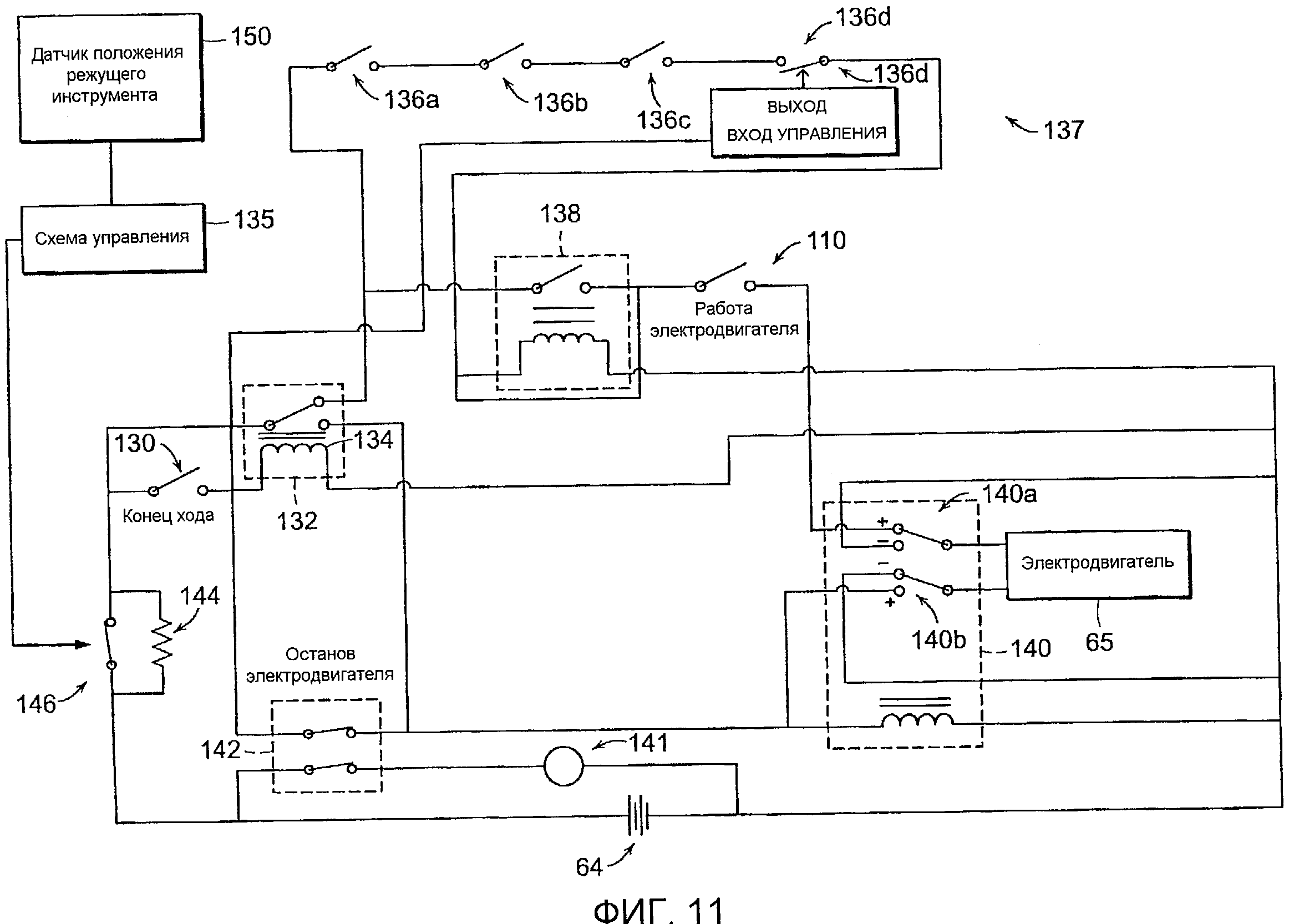
Фиг.11 - схематическое представление схемы, применяемой в инструменте в соответствии с различными вариантами осуществления настоящего изобретения;
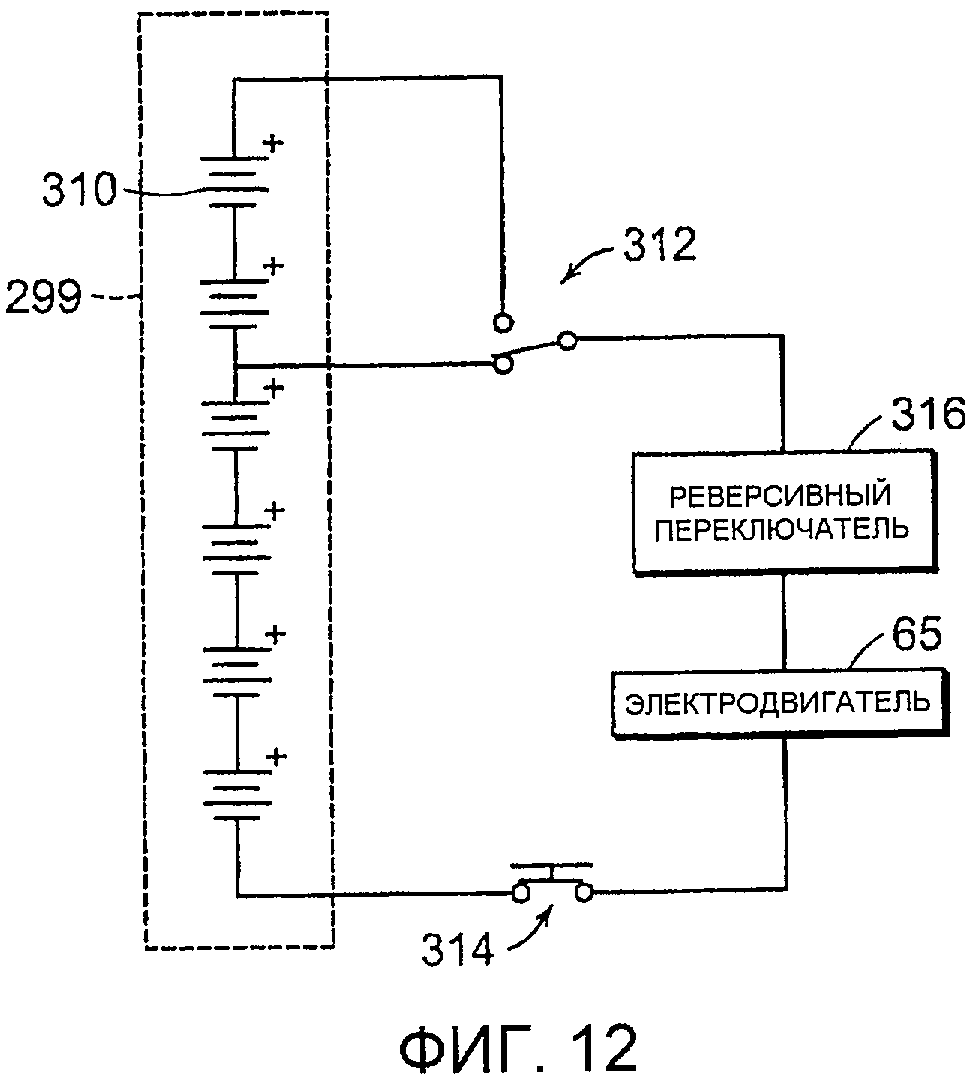
Фиг.12-14 и 17 - схематическое представление схемы, применяемой для питания электродвигателя инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.15 - блок-схема, представляющая схему управления зарядкой в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.16 - блок-схема, представляющая основное зарядное устройство в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.18 - типичная кривая мощности батареи;
Фиг.19 и 20 - схематическое представление схем, применяемых в инструменте в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.21 и 23 - схемы инструментов в соответствии с различными вариантами осуществления настоящего изобретения; и
Фиг.22 и 24 - схемы комплектов батарей в соответствии с различными вариантами осуществления настоящего изобретения.
ОПИСАНИЕ
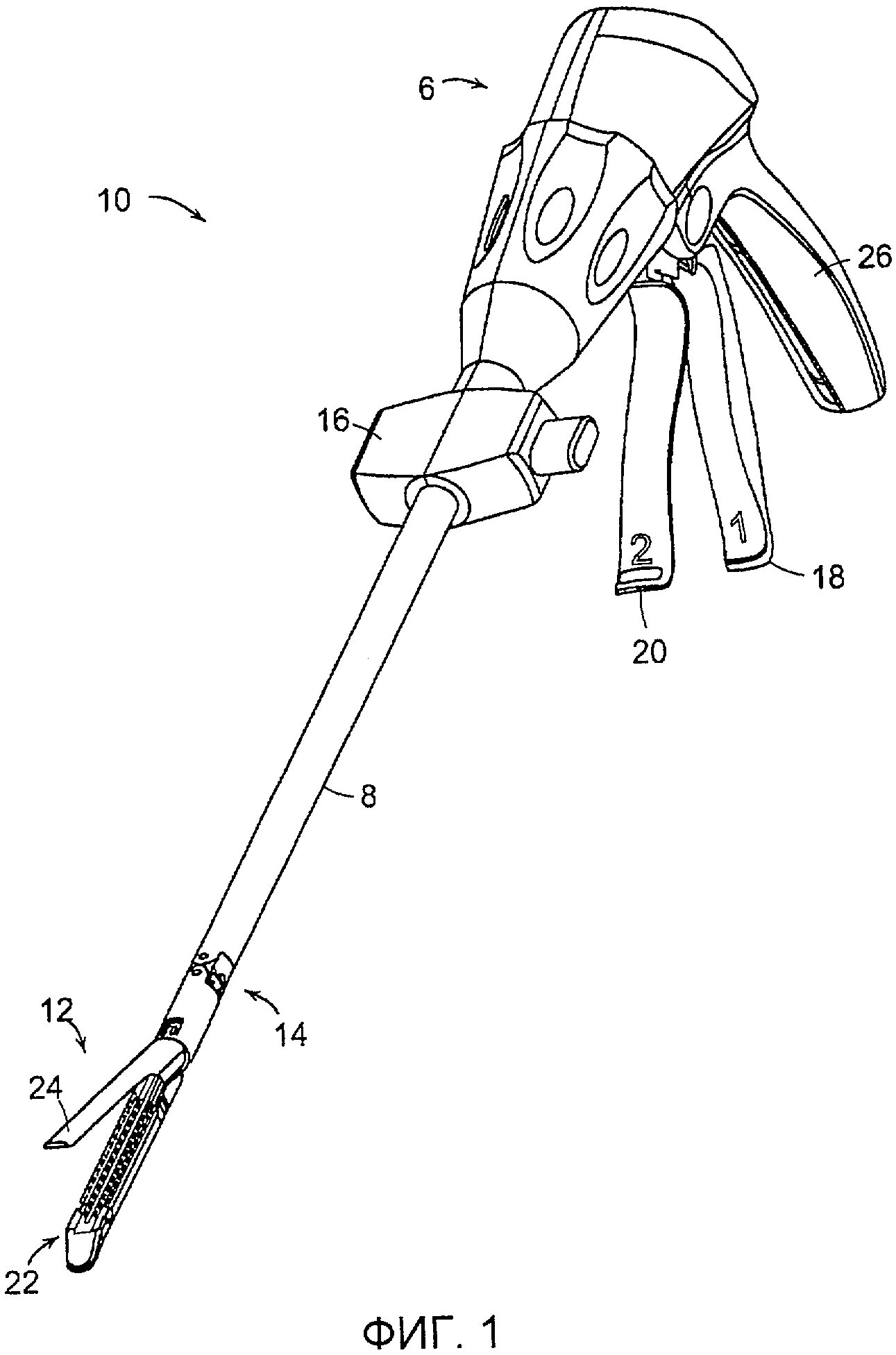
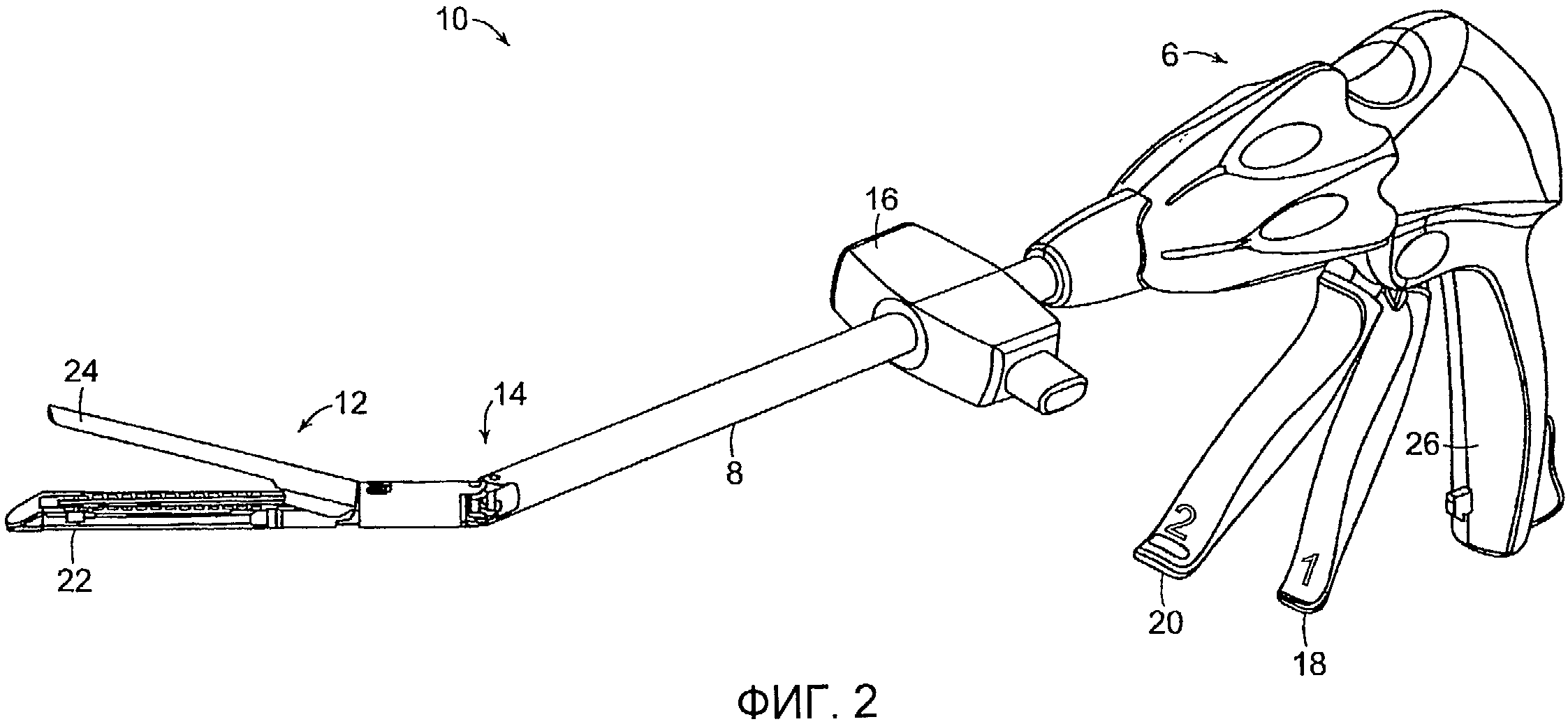
На фиг.1 и 2 изображен хирургический режущий и скрепляющий инструмент 10 в соответствии с различными вариантами осуществления настоящего изобретения. Изображенный вариант осуществления является эндоскопическим инструментом, и, в общем, варианты осуществления инструмента 10, описанные в настоящей заявке, являются эндоскопическими хирургическими режущими и скрепляющими инструментами. Однако следует отметить, что, в соответствии с другими вариантами осуществления настоящего изобретения, инструмент может быть неэндоскопическим хирургическим режущим и скрепляющим инструментом, например лапароскопическим инструментом.
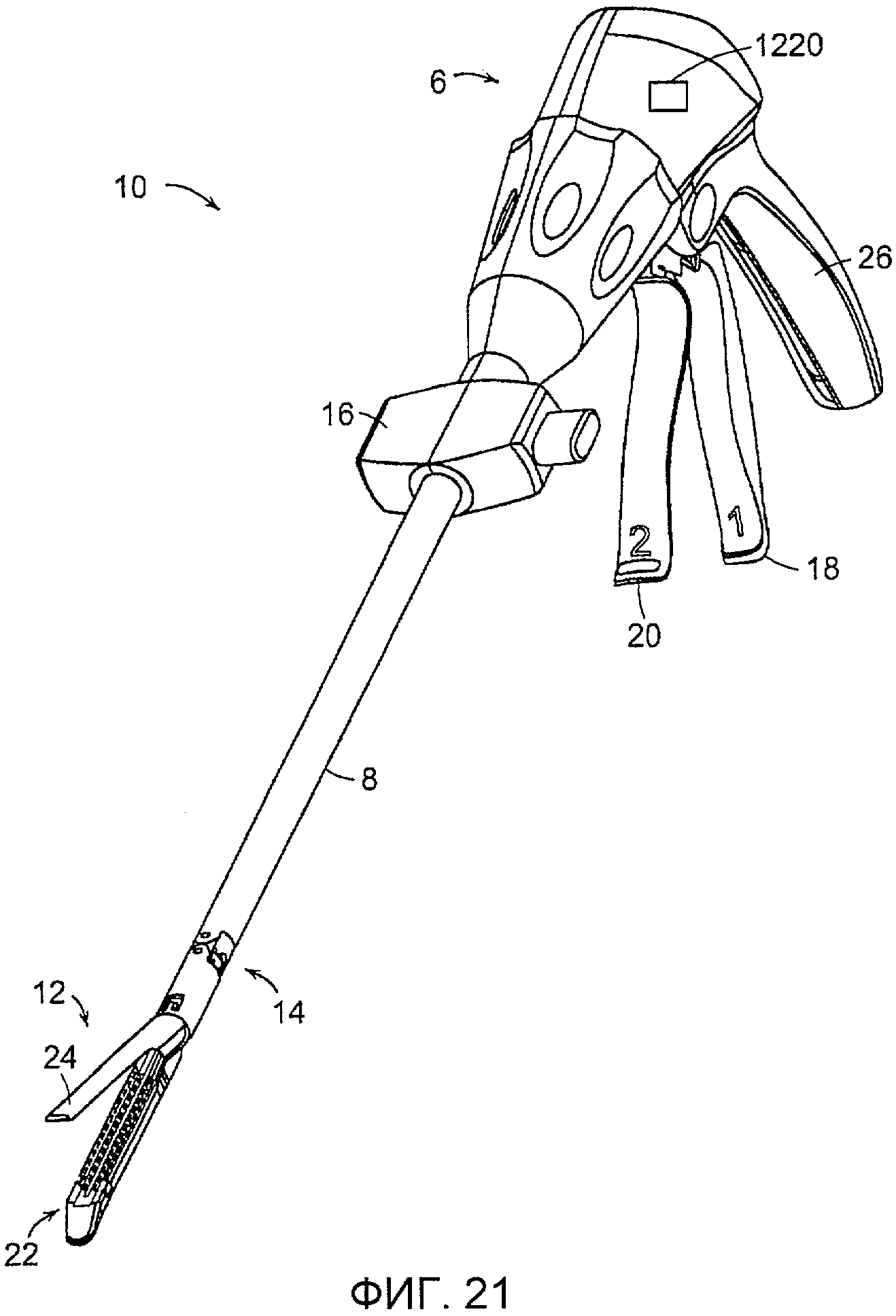
Хирургический инструмент 10, изображенный на фиг.1 и 2, содержит рукоятку 6, вал 8 и шарнирно-поворотный концевой эффектор 12, шарнирно соединенный с валом 8 в шарнире 14 сочленения. Вблизи рукоятки 6 может быть обеспечено устройство 16 управления шарнирным поворотом для осуществления поворота концевого эффектора 12 в шарнире 14 сочленения. В показанном варианте осуществления концевой эффектор 12 выполнен с возможностью выполнения функции эндоскопического режущего инструмента для сжатия, разрезания и сшивания скобками ткани, хотя в других вариантах осуществления можно применять концевые эффекторы других типов, например концевые эффекторы для хирургических устройств других типов, например захваты, режущие приспособления, сшивающие скобками аппараты, приспособления для наложения скрепок, устройства доступа, устройства для доставки лекарства генной терапии к месту действия, ультразвуковые, RF (высокочастотные) или лазерные устройства и т.п. Более подробные сведения о RF устройствах можно найти в патенте США 5403312.
Рукоятка 6 инструмента 10 может содержать смыкающий спусковой механизм 18 и выстреливающий спусковой механизм 20 для приведения в действие концевого эффектора 12. Следует понимать, что инструменты, содержащие концевые эффекторы, предназначенные для разных хирургических целей, могут содержать разные количества или типы спусковых механизмов или других подходящих элементов управления для манипулирования концевым эффектором 12. Концевой эффектор 12 показан отделенным от рукоятки 6 предпочтительно удлиненным валом 8. В одном варианте осуществления врач или хирург, оперирующий инструментом 10, может шарнирно поворачивать концевой эффектор 12 относительно вала 8 с помощью устройства 16 управления шарнирным поворотом, как более подробно описано в опубликованной заявке на патент США № 2007/0158385 A1, «Surgical Instrument Having An Articulating End Effector», изобретателей Geoffrey C. Hueil et al., которая включена в настоящее описание посредством ссылки.
В настоящем примере концевой эффектор 12 содержит, помимо прочего, желоб 22 для скобок и зажимной элемент с поворотно-поступательным перемещением, например упор 24, которые удерживаются на некотором разделяющеим их расстоянии, которое обеспечивает эффективное сшивание скобками и разрезание ткани, зажатой в концевом эффекторе 12. Рукоятка 6 содержит ручку 26 пистолетного типа, к которой смыкающий спусковой механизм 18 подтягивается поворотным движением врачом для осуществления зажима или смыкания упора 24 к желобу 22 для скобок концевого эффектора 12, чтобы тем самым зажать ткань, расположенную между упором 24 и желобом 22. Выстреливающий спусковой механизм 20 находится дальше снаружи от смыкающего спускового механизма 18. После того как смыкающий спусковой механизм 18 зафиксируется в положении смыкания, как дополнительно поясняется ниже, выстреливающий спусковой механизм 20 может слегка повернуться к ручке 26 пистолетного типа настолько, что его сможет достать оперирующий хирург, работающий одной рукой. Затем оперирующий хирург может поджать поворотным движением выстреливающий спусковой механизм 20 к ручке 26 пистолетного типа для осуществления сшивания скобками и разрезания ткани, зажатой в концевом эффекторе 12. В других вариантах осуществления возможно применение зажимных элементов других типов, кроме упора 24, например, противолежащего зажима и т.п.
Далее следует понимать, что в настоящем описании термины «проксимальный» и «дистальный» применяют для обозначения положения относительно захвата практикующим врачом рукоятки 6 инструмента 10. Следовательно, концевой эффектор 12 является дистальным относительно более проксимальной рукоятки 6. Дополнительно следует понимать, что, для удобства и ясности, термины, обозначающие пространственное положение, например «вертикальный» и «горизонтальный», используются в настоящем описании применительно к чертежам. Однако существует множество пространственно-угловых положений применения хирургических инструментов, и упомянутые термины не предполагают ограничительного и абсолютного значения.
Смыкающий спусковой механизм 18 может быть приведен в действие первым. После того как врач удостоверится в удовлетворительном положении концевого эффектора 12, врач может поджать смыкающий спусковой механизм 18 в его фиксируемое положение полного смыкания вблизи ручки 26 пистолетного типа. Затем можно приводить в действие выстреливающий спусковой механизм 20. Выстреливающий спусковой механизм 20 возвращается в разжатое положение (см. фиг.1 и 2), когда врач прекращает нажатие, как более полно описано ниже. Деблокирующая кнопка на рукоятке 6, при нажатии, может отпустить зафиксированный смыкающий спусковой механизм 18. Деблокирующая кнопка может иметь разные формы исполнения, например форму сдвижной деблокирующей кнопки 160, показанной на фиг.7, или любого из механизмов, описанных в опубликованной заявке на патент США № 2007/0175955 A1, «Surgical cutting and fastening instrument with closure trigger locking mechanism», которая включена в настоящее описание посредством ссылки.
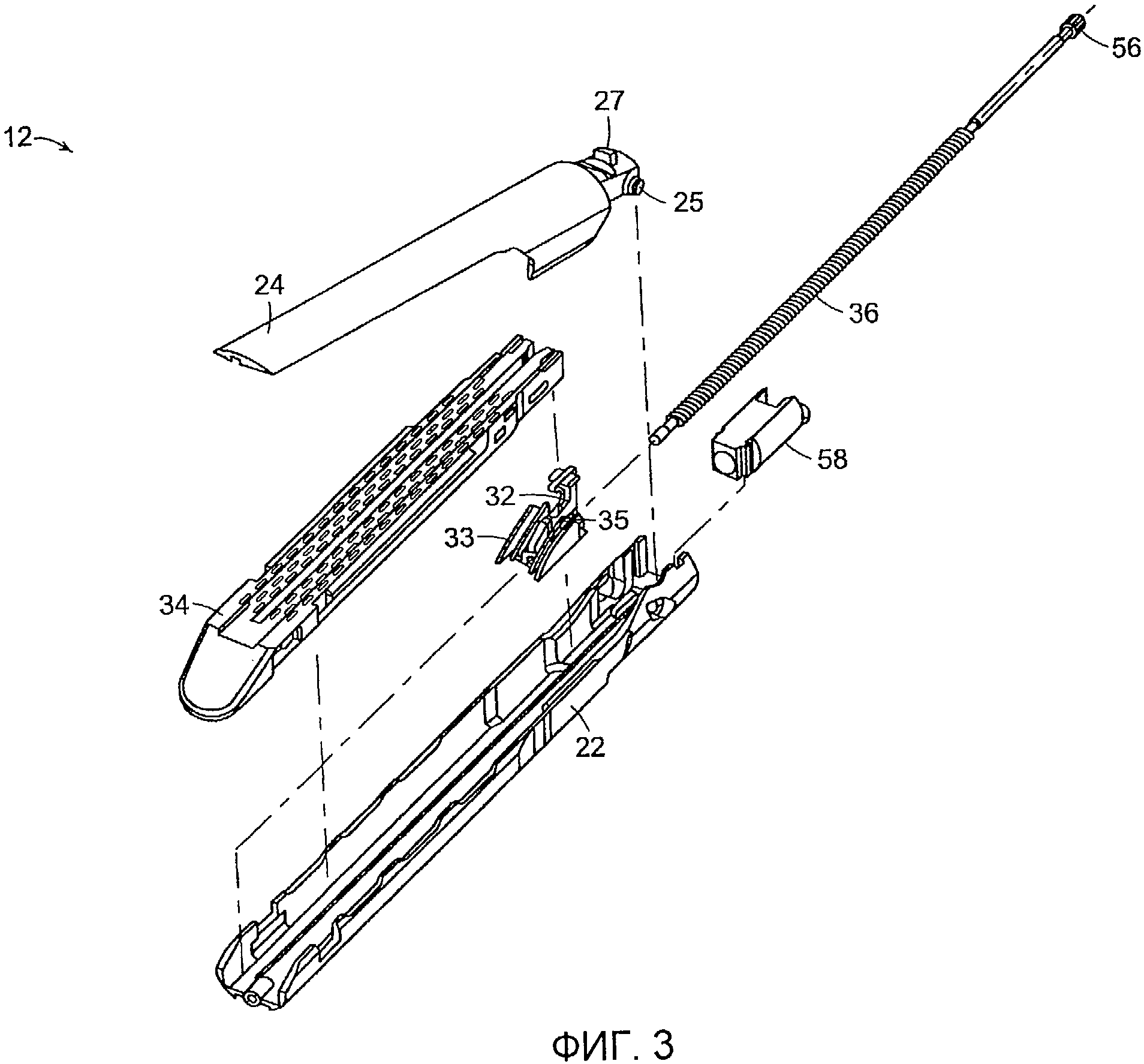
На фиг.3 представлено покомпонентное изображение концевого эффектора 12 в соответствии с различными вариантами осуществления. Как показано в представленном варианте осуществления, концевой эффектор 12 может содержать, в дополнение к вышеупомянутым желобу 22 и упору 24, режущий инструмент 32, скользящий блок 33, кассету 34 для скобок, которая вмещена с возможностью извлечения в желоб 22, и винтовой вал 36. Режущий инструмент 32 может быть, например, ножом. Упор 24 можно размыкать и смыкать поворотом на оси 25 поворота, соединенной с проксимальным концом желоба 22. Упор 24 может также содержать лапку 27 на своем проксимальном конце, которая вставлена в компонент механической смыкающей системы (дополнительно описанной ниже) для размыкания и смыкания упора 24. Когда смыкающий спусковой механизм 18 приводится в действие, то есть поджимается пользователем инструмента 10, упор 24 может поворачиваться вокруг оси 25 поворота в сжатое или сомкнутое положение. Если зажим концевым эффектором 12 является удовлетворительным, то оперирующий хирург может привести в действие выстреливающий спусковой механизм 20, который, как более подробно поясняется ниже, приводит нож 32 и скользящий блок 33 в продольное движение по желобу 22, с разрезанием тем самым ткани, зажатой внутри концевого эффектора 12. Перемещение скользящего блока 33 по желобу 22 вызывает выталкивание скобок из кассеты 34 для скобок сквозь разрезанную ткань и в сомкнутый упор 24, который загибает скобки для скрепления разрезанной ткани. В различных вариантах осуществления скользящий блок 33 может быть неразъемным компонентом кассеты 34. В патенте США № 6978921, «Surgical stapling instrument incorporating an E-beam firing mechanism», который включен в настоящее описание посредством ссылки, приведены дополнительные сведения, касающиеся упомянутых двухходовых режущих и скрепляющих инструментов. Скользящий блок 33 может быть такой составной частью кассеты 34, что, когда нож 32 отводится после операции разрезания, скользящий блок 33 не отводится.
Следует отметить, что, хотя в вариантах осуществления инструмента 10, описанного в настоящей заявке, применяется концевой эффектор 12, который сшивает скобками разрезанную ткань, в других вариантах осуществления возможно применение отличающихся методов скрепления или герметизации разрезанной ткани. Например, можно также применять концевые эффекторы, которые используют RF-энергию или клея для скрепления разрезанной ткани. В патенте США № 5709680, «Electrosurgical Hemostatic Device», изобретателей Yates et al., и патенте США № 5688270, «Electrosurgical Hemostatic Device with Recessed and/or Offset Electrodes», изобретателей Yates et al., которые включены в настоящее описание посредством ссылки, предложен эндоскопический режущий инструмент, который использует RF-энергию для герметизации разрезанной ткани. В опубликованной заявке на патент США № 2007/0102453 A1 изобретателей Jerome R. Morgan, et. al. и опубликованной заявке на патент США № 2007/0102452 A1 изобретателей Frederick E. Shelton, IV, et. al., которые также включены в настоящее описание посредством ссылки, предлагаются эндоскопические режущие инструменты, в которых применяются клеи для скрепления разрезанной ткани. Соответственно, хотя настоящее описание относится к операциям разрезания/сшивания скобками и подобным нижеследующим, следует понимать, что настоящий вариант осуществления является примерным и не предполагает ограничения. Применение других методов скрепления тканей также возможно.
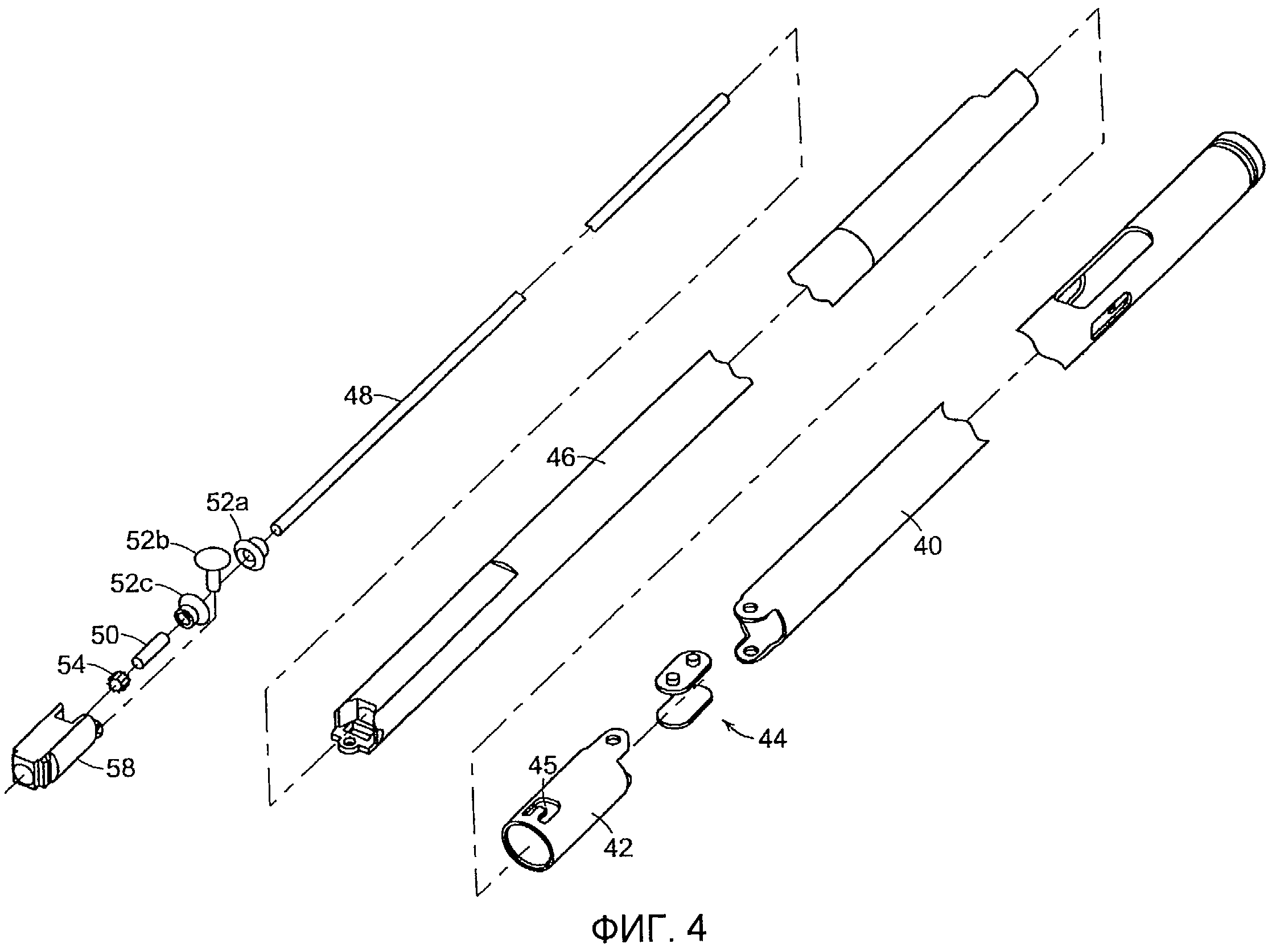
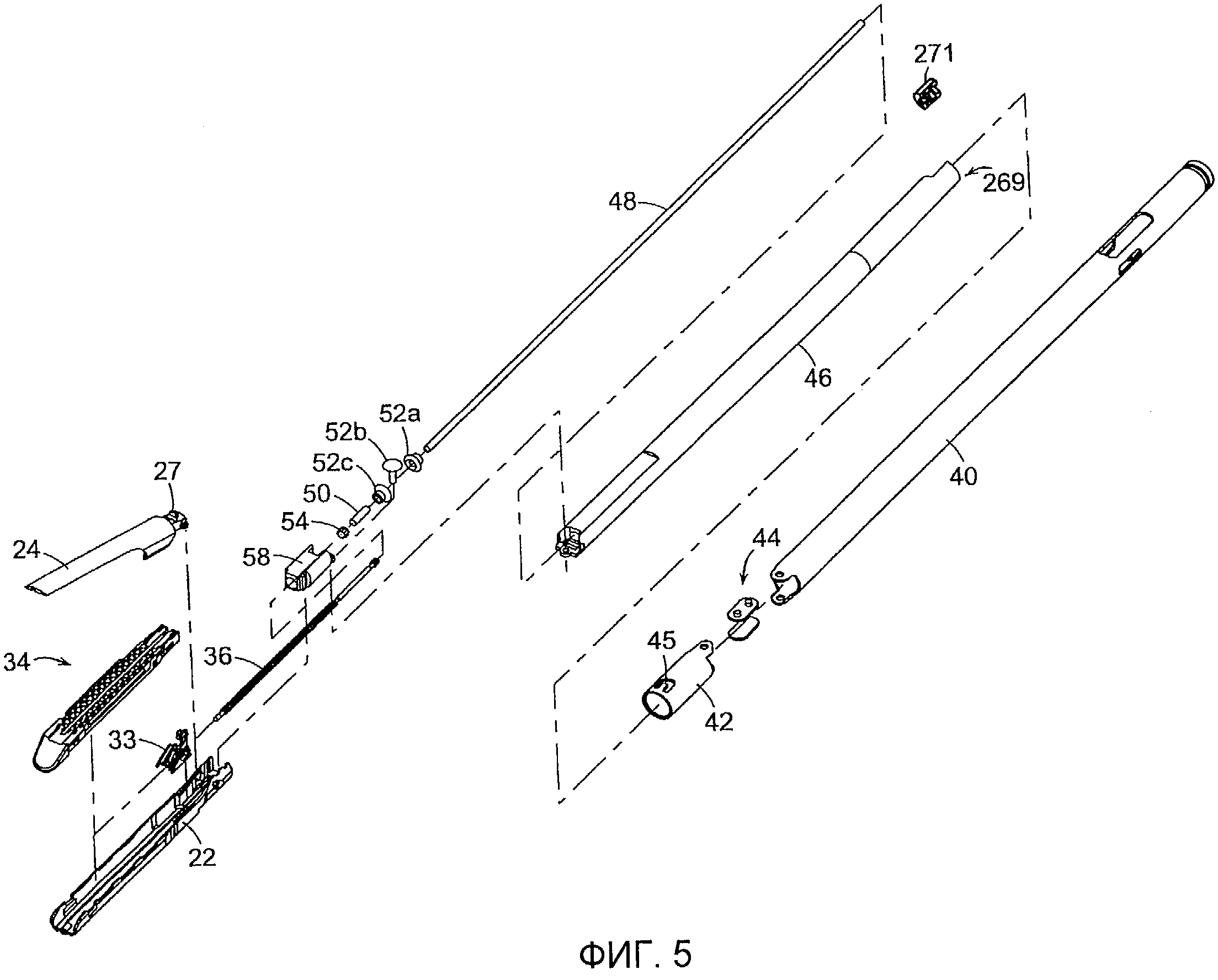
На фиг.4 и 5 представлены покомпонентные изображения, и на фиг.6 представлен вид сбоку концевого эффектора 12 и вала 8 в соответствии с различными вариантами осуществления. Как показано в представленных вариантах осуществления, вал 8 может содержать проксимальную смыкающую трубку 40 и дистальную смыкающую трубку 42, соединенные между собой с возможностью поворота шатунами 44. Дистальная смыкающая трубка 42 содержит отверстие 45, в которое вставлена лапка 27 на упоре 24, для размыкания и смыкания упора 24, как дополнительно поясняется ниже. Внутри смыкающих трубок 40, 42 может быть расположена проксимальная несущая трубка 46. Внутри проксимальной несущей трубки 46 может быть расположен главный поворотный (или проксимальный) приводной вал 48, который сообщается с вспомогательным (или дистальным) приводным валом 50 через узел 52 конической шестерни. Вспомогательный приводной вал 50 соединен с ведущим зубчатым колесом 54, которое находится в зацеплении с проксимальным ведущим зубчатым колесом 56 винтового вала 36. Вертикальная коническая шестерня 52b может располагаться и поворачиваться в отверстии 57 на дистальном конце проксимальной несущей трубки 46. Для вмещения вспомогательного приводного вала 50 и ведущих зубчатых колес 54, 56 можно применить дистальную несущую трубку 58. Главный приводной вал 48, вспомогательный приводной вал 50 и шарнирно-поворотный узел (например, узел 52a-c конических шестерен) иногда в настоящем описании совместно именуются «узлом главного приводного вала».
Подшипник 38, расположенный на дистальном конце желоба 22 для скобок, вмещает приводной винт 36 и тем самым допускает свободное вращение приводного винта 36 относительно желоба 22. Приводной винт 36 может сопрягаться с резьбовым отверстием (не показанным) ножа 32 таким образом, что вращение вала 36 вызывает поступательное перемещение ножа 32 в дистальном или проксимальном направлении (в зависимости от направления вращения) по желобу 22 для скобок. Соответственно, когда главный приводной вал 48 приводится во вращение приведением в действие выстреливающего спускового механизма 20 (как подробнее изложено ниже), узел 52a-c конических шестерен вынуждает вращаться вспомогательный приводной вал 50, который, в свою очередь, благодаря зацеплению ведущих зубчатых колес 54, 56, приводит во вращение винтовой вал 36, что вызывает продольное перемещение ведущего элемента 32 ножа по желобу 22 для разрезания любой ткани, зажатой внутри концевого эффектора. Скользящий блок 33 может быть выполнен, например, из пластика, и может иметь скошенную дистальную поверхность. По мере того как скользящий блок 33 движется по желобу 22, скошенная передняя поверхность может вжимать вверх или выталкивать скобки из кассеты для скобок сквозь зажатую ткань и в упор 24. Упор 24 загибает скобки и тем самым сшивает скобками разрезанную ткань. Когда нож 32 отводится, нож 32 и скользящий блок 33 могут расцепляться, при этом скользящий блок 33 остается на дистальном конце желоба 22.
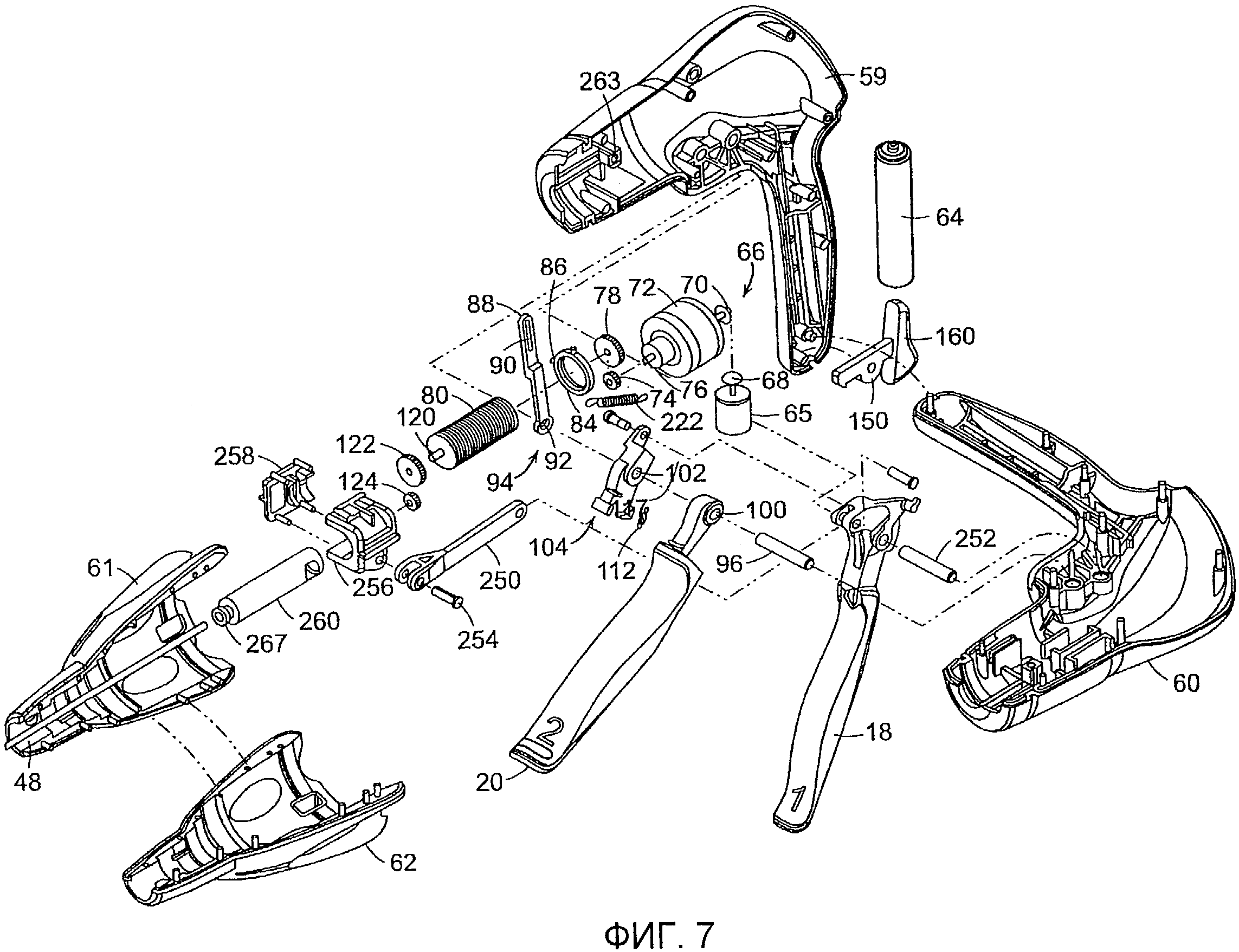
На фиг.7-10 представлен примерный вариант осуществления эндоскопического режущего инструмента с приводом от электродвигателя. Изображенный вариант осуществления обеспечивает для пользователя обратную связь по срабатыванию и усилию нагрузки режущего инструмента в концевом эффекторе. Кроме того, данный вариант осуществления может использовать мощность, развиваемую пользователем при отводе выстреливающего спускового механизма 20, для подачи мощности в устройство (в так называемом режиме с усилением). Как показано в представленном варианте осуществления, рукоятка 6 содержит внешние нижние боковины 59, 60 и внешние верхние боковины 61, 62, которые вместе образуют, в общем, внешнюю часть рукоятки 6. Батарея 64, например, ионная литиевая батарея, может быть установлена в участок 26 ручки пистолетного типа рукоятки 6. Батарея 64 питает электродвигатель 65, расположенный внутри верхнего участка, относящегося к участку 26 ручки пистолетного типа рукоятки 6. В соответствии с различными вариантами осуществления, для питания электродвигателя 65 можно применить несколько батарейных элементов, соединенных последовательно.
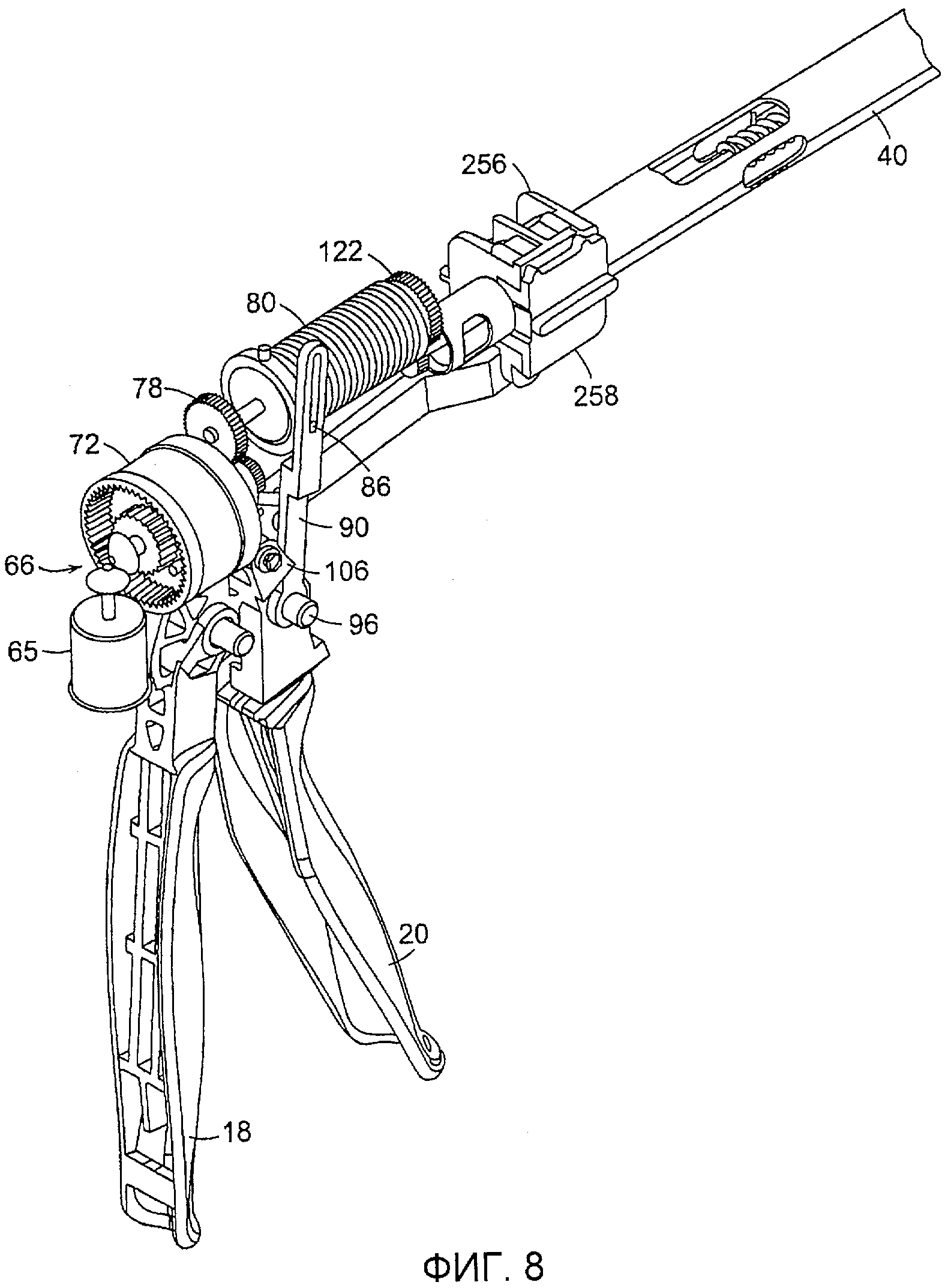
Электродвигатель 65 может быть приводным щеточным электродвигателем постоянного тока с максимальной частотой вращения приблизительно 25000 об/мин. В других вариантах осуществления электродвигатель 65 может содержать бесщеточный электродвигатель, электродвигатель с батарейным питанием, синхронный электродвигатель, шаговый электродвигатель или любой другой подходящий электродвигатель. Электродвигатель 65 может приводить в движение 90° узел 66 конической шестерни, содержащий первую коническую шестерню 68 и вторую коническую шестерню 70. Узел 66 конических шестерен может приводить в движение узел 72 планетарной шестерни. Узел 72 планетарной шестерни может содержать ведущую шестерню 74, соединенную с приводным валом 76. Ведущая шестерня 74 может приводить в движение сопряженную венцовую шестерню 78, которая приводит в движение барабан 80 косозубой шестерни посредством приводного вала 82. Кольцо 84 может быть посажено на резьбе на барабан 80 косозубой шестерни. Следовательно, когда электродвигатель 65 вращается, кольцо 84 перемещается по барабану 80 косозубой шестерни посредством промежуточного узла 66 конической шестерни, узла 72 планетарной шестерни и венцовой шестерни 78.
Рукоятка 6 может также содержать датчик 110 работы электродвигателя, связанный с выстреливающим спусковым механизмом 20, для обнаружения, когда выстреливающий спусковой механизм 20 вжат (или «примкнут») в участок 26 ручки пистолетного типа рукоятки 6 оперирующим хирургом, и тем самым для запуска исполнения операции разрезания/сшивания скобками концевым эффектором 12. Датчик 110 может быть пропорциональным датчиком, например реостатом или переменным резистором. Когда выстреливающий спусковой механизм 20 вжимают, датчик 110 обнаруживает перемещение и посылает электрический сигнал, характеризующий напряжение (или мощность), которое следует подавать в электродвигатель 65. Когда датчик 110 является переменным резистором или чем-то подобным, частота вращения электродвигателя 65 может быть, в общем, пропорциональна величине перемещения выстреливающего спускового механизма 20. То есть, если оперирующий хирург лишь слегка вжимает или смыкает выстреливающий спусковой механизм 20, то частота вращения электродвигателя 65 является относительно низкой. Когда выстреливающий спусковой механизм 20 полностью вжат (или находится в полностью сомкнутом положении), частота вращения электродвигателя 65 является максимальной. Другими словами, чем сильнее пользователь вжимает выстреливающий спусковой механизм 20, тем более высокое напряжение подается на электродвигатель 65, что обуславливает более высокие обороты.
Рукоятка 6 может содержать среднюю деталь 104 рукоятки, прилегающую к верхнему участку выстреливающего спускового механизма 20. Рукоятка 6 может также содержать оттягивающую пружину 112, закрепленную между штырьками на средней детали 104 рукоятки и выстреливающим спусковым механизмом 20. Оттягивающая пружина 112 может оттягивать выстреливающий спусковой механизм 20 к его полностью разомкнутому положению. При этом, когда оперирующий хирург отпустит выстреливающий спусковой механизм 20, оттягивающая пружина 112 оттянет выстреливающий спусковой механизм 20 в его разомкнутое положение, что прекращает воздействие на датчик 110 и тем самым останавливает вращение электродвигателя 65. Более того, благодаря оттягивающей пружине 112, каждый раз, когда пользователь смыкает выстреливающий спусковой механизм 20, пользователь будет ощущать сопротивление операции смыкания, что обеспечивает пользователя обратной связью по величине частоты вращения, развиваемой электродвигателем 65. Кроме того, оперирующий хирург может прекратить отвод выстреливающего спускового механизма 20 для снятия тем самым усилия с датчика 110 и тем самым для останова электродвигателя 65. По существу, пользователь может остановить срабатывание концевого эффектора 12 с обеспечением оперирующего хирурга в какой-то степени возможностью управления операцией разрезания/скрепления.
Дистальный конец барабана 80 косозубой шестерни содержит дистальный приводной вал 120, который приводит в движение венцовую шестерню 122, которая сопрягается с ведущей шестерней 124. Ведущая шестерня 124 соединена с главным приводным валом 48 узла главного приводного вала. При этом вращение электродвигателя 65 вызывает вращение узла главного приводного вала, что приводит в действие концевой эффектор 12 вышеописанным способом.
Кольцо 84, посаженное на резьбе на барабан 80 косозубой шестерни, может содержать штырь 86, который расположен внутри прорези 88 в кулисе 90. Кулиса 90 содержит отверстие 92 на противоположном конце 94, которое вмещает шарнирный палец 96, который присоединен между внешними боковинами 59, 60 рукоятки. Шарнирный палец 96 расположен также с проходом через отверстие 100 в выстреливающем спусковом механизме 20 и отверстие 102 в средней детали 104 рукоятки.
Кроме того, рукоятка 6 может содержать датчик 130 реверса электродвигателя (или конца хода) и датчик 142 останова электродвигателя (или начала хода). В различных вариантах осуществления датчик 130 реверса электродвигателя может быть концевым переключателем, расположенным на дистальном конце барабана 80 косозубой шестерни таким образом, что кольцо 84, установленное на резьбе на барабане 80 косозубой шестерни, входит в контакт с датчиком 130 реверса электродвигателя и включает его, когда кольцо 84 достигает дистального конца барабана 80 косозубой шестерни. Датчик 130 реверса электродвигателя, при его срабатывании, посылает сигнал в электродвигатель 65 на реверсирование направления его вращения и тем самым на отведение ножа 32 концевого эффектора 12 после операции разрезания. Датчик 142 останова электродвигателя может быть, например, нормально замкнутым концевым переключателем. В различных вариантах осуществления упомянутый датчик может располагаться на проксимальном конце барабана 80 косозубой шестерни таким образом, что кольцо 84 размыкает переключатель 142, когда кольцо 84 достигает проксимального конца барабана 80 косозубой шестерни.
Во время работы, когда хирург, оперирующий инструментом 10, подтягивает назад выстреливающий спусковой механизм 20, датчик 110 определяет расположение выстреливающего спускового механизма 20 и передает сигнал на электродвигатель 65, чтобы обеспечить правое вращение электродвигателя 65, например, с частотой вращения, пропорциональной тому, насколько сильно оперирующий хирург подтягивает выстреливающий спусковой механизм 20. Правое вращение электродвигателя 65, в свою очередь, вызывает вращение венцовой шестерни 78 на дистальном конце узла 72 планетарной шестерни и тем самым вызывает вращение барабана 80 косозубой шестерни, что вызывает движение кольца 84, установленного на резьбе на барабане 80 косозубой шестерни, в дистальном направлении по барабану 80 косозубой шестерни. Вращение барабана 80 косозубой шестерни приводит во вращение вышеописанный узел главного приводного вала, как описано выше, что, в свою очередь, вызывает срабатывание ножа 32 в концевом эффекторе 12. То есть нож 32 и скользящий блок 33 приводятся в продольное движение по желобу 22 с разрезанием тем самым ткани, зажатой в концевом эффекторе 12. Кроме того, обеспечивает выполнение операции сшивания скобками концевым эффектором 12 в тех вариантах осуществления, в которых применяется сшивающий скобками концевой эффектор.
К моменту, когда операция разрезания/сшивания скобками концевым эффектором 12 будет закончена, кольцо 84 на барабане 80 косозубой шестерни продвинется до дистального конца барабана 80 косозубой шестерни и тем самым вызовет включение датчика 130 реверса электродвигателя, в результате чего в электродвигатель передается сигнал, вызывающий реверсирование направления вращения электродвигателя 65. Это, в свою очередь, вызывает отведение ножа 32, а также приводит кольцо 84 на барабане 80 косозубой шестерни в обратное движение к проксимальному концу барабана 80 косозубой шестерни.
Средняя деталь 104 рукоятки имеет задний буртик 106, который входит в зацепление с кулисой 90, как лучше всего показано на фиг.8 и 9. Средняя деталь 104 рукоятки имеет также ограничитель 107 поступательного движения, который входит в зацепление с выстреливающим спусковым механизмом 20. Перемещение кулисы 90 регулируется, как поясняется выше, вращением электродвигателя 65. Когда кулиса 90 поворачивается против часовой стрелки (CCW) в то время, как кольцо 84 движется от проксимального конца барабана 80 косозубой шестерни к дистальному концу, средняя деталь 104 рукоятки будет иметь свободу поворота против часовой стрелки (CCW). Следовательно, по мере того как пользователь будет вжимать выстреливающий спусковой механизм 20, выстреливающий спусковой механизм 20 будет входить в зацепление с ограничителем 107 поступательного движения средней детали 104 рукоятки и тем самым вынуждать среднюю деталь 104 рукоятки вращаться против часовой стрелки (CCW). Однако вследствие зацепления заднего буртика 106 с кулисой 90 средняя деталь 104 рукоятки сможет поворачиваться против часовой стрелки (CCW) лишь настолько, насколько допускает кулиса 90. При этом, если электродвигатель 65 должен перестать вращаться по какой-либо причине, то кулиса 90 перестанет поворачиваться, и пользователь не сможет дальше вжимать выстреливающий спусковой механизм 20, так как средняя деталь 104 рукоятки не будет свободно поворачиваться против часовой стрелки (CCW) из-за кулисы 90.
Компоненты примерной смыкающей системы для смыкания (или сжатия) упора 24 концевого эффектора 12 посредством отвода смыкающего спускового механизма 18 также показаны на фиг.7-10. В представленном варианте осуществления смыкающая система содержит вилку 250, соединенную со смыкающим спусковым механизмом 18 с помощью шарнирного пальца 251, который вставлен сквозь совмещенные отверстия как в смыкающем спусковом механизме 18, так и в вилке 250. Шарнирный палец 252, на котором поворачивается смыкающий спусковой механизм 18, вставлен сквозь другое отверстие в смыкающем спусковом механизме 18, которое смещено от места, где палец 251 вставлен сквозь смыкающий спусковой механизм 18. Следовательно, отвод смыкающего спускового механизма 18 вынуждает верхнюю часть смыкающего спускового механизма 18, к которой вилка 250 прикреплена пальцем 251, поворачиваться против часовой стрелки (CCW). Дистальный конец вилки 250 соединен пальцем 254 с первой смыкающей скобой 256. Первая смыкающая скоба 256 соединяется со второй смыкающей скобой 258. Смыкающие скобы 256, 258 вместе образуют отверстие, в которое посажен и зафиксирован проксимальный конец проксимальной смыкающей трубки 40 (см. фиг.4) так, что продольное перемещение смыкающих скоб 256, 258 вызывает продольное перемещение проксимальной смыкающей трубки 40. Инструмент 10 содержит также смыкающий шток 260, находящийся внутри проксимальной смыкающей трубки 40. Смыкающий шток 260 может содержать проем 261, в который входит штырь 263 одной из внешних деталей рукоятки, например внешней нижней боковины 59 в показанном варианте осуществления, для жесткой фиксации смыкающего штока 260 с рукояткой 6. При этом проксимальная смыкающая трубка 40 может продольно перемещаться относительно смыкающего штока 260. Смыкающий шток 260 может также содержать дистальную манжету 267, которая входит в углубление 269 в проксимальной несущей трубке 46 и фиксируется в нем крышкой 271 (см. фиг.4).
Когда, в процессе работы, вилка 250 поворачивается из-за отвода смыкающего спускового механизма 18, смыкающие скобы 256, 258 вынуждают проксимальную смыкающую трубку 40 перемещаться в дистальном направлении (т.е. от рукояточного конца инструмента 10), что вызывает перемещение дистальной смыкающей трубки 42 в дистальном направлении, что, в свою очередь, вызывает поворот упора 24 вокруг оси 25 поворота в зажатое или сомкнутое положение. Когда смыкающий спусковой механизм 18 деблокируется из положения фиксации, проксимальная смыкающая трубка 40 принуждается к сдвигу в проксимальном направлении, что приводит к сдвигу дистальной смыкающей трубки 42 в проксимальном направлении, что, в свою очередь, благодаря лапке 27, вставленной в проем 45 дистальной смыкающей трубки 42, вызывает поворот упора 24 вокруг оси 25 поворота в разомкнутое или несжатое положение. При этом, путем отвода и фиксации смыкающего спускового механизма 18, оперирующий хирург может зажать ткань между упором 24 и желобом 22 и может разжать ткань после операции разрезания/сшивания скобками путем деблокирования смыкающего спускового механизма 18 из положения фиксации.
Дополнительные конфигурации моторизованных хирургических инструментов описаны в опубликованной заявке на патент США № 2007/0175962 A1, «Motor-driven surgical cutting and fastening instrument with tactile position feedback», которая целиком включена в настоящее описание посредством ссылки.
Фиг.11 представляет собой схематическое представление схемы управления электродвигателем в соответствии с различными вариантами осуществления настоящего изобретения. В различных вариантах осуществления схема управления электродвигателем может содержать, по меньшей мере, одну интегральную схему (IC), например процессор, память, микроконтроллер, схемы синхронизации и т.п. В других вариантах осуществления схема управления электродвигателем может не содержать никаких IC. Такая неинтегральная схема управления электродвигателем может быть полезной, так как часто трудно, сложно и дорого стерилизовать хирургический инструмент, содержащий IC.
Когда оперирующий хирург первоначально подтягивает выстреливающий спусковой механизм 20 после фиксации смыкающего спускового механизма 18, датчик 110 включается (или замыкается, когда датчик 110 является переключателем) и тем самым допускает протекание через него тока. Если нормально разомкнутый сенсорный переключатель 130 реверса электродвигателя находится в разомкнутом состоянии (что означает, что конец хода концевого эффектора еще не достигнут), ток будет протекать к однополюсному двухпозиционному реле 132. Когда датчик-переключатель 130 реверса электродвигателя не замкнут, катушка 134 индуктивности реле 132 не будет возбуждена и поэтому реле 132 будет находиться в своем невозбужденном состоянии.
Как показано на фиг.11, схема может содержать также резистивный элемент 144 и переключатель 146, соединенные параллельно, при этом параллельные элементы соединены последовательно с реле 132. Резистивный элемент 144 и переключатель 146 также подсоединены к источнику 64 питания. Переключатель 146 может находиться под управлением схемы 148 управления, которая реагирует на датчик 150 положения режущего инструмента. В соответствии с различными вариантами осуществления схема 148 управления может размыкать переключатель 146, когда режущий инструмент 32 находится (i) очень близко к началу его хода и (ii) очень близко к концу его хода. Например, схема управления может размыкать переключатель, когда режущий инструмент 32 находится (i) в 0,001 дюймах от начальной точки его хода и (ii) в 0,001 дюймах от конца его хода, согласно определению датчиком 150 положения режущего инструмента. При разомкнутом переключателе 146 ток протекает через резистивный элемент 144 и затем через реле 132, реле 138, сенсорный переключатель 110 работы электродвигателя в электродвигатель 65. Протекание тока через резистивный элемент 144 снижает величину тока, подаваемого в электродвигатель 65, что снижает мощность, развиваемую электродвигателем 65. Следовательно, когда режущий инструмент 32 находится (i) очень близко к началу его хода или (ii) очень близко к концу его хода, мощность, развиваемая электродвигателем 65, снижается. Напротив, как только режущий инструмент 32 переместится достаточно далеко от его начальной точки или конечной точки хода, схема 148 управления может замкнуть переключатель 146, с замыканием накоротко резистивного элемента 144, что приводит к усилению тока через электродвигатель 65 и тем самым повышает мощность, развиваемую электродвигателем.
В соответствии с различными вариантами осуществления, электрическая схема дополнительно содержит сенсорные переключатели 136a-d блокировки, совместно образующие цепь 137 блокировки, по которой ток из реле 132, когда оно обесточено, проходит для электрического срабатывания электродвигателя 65. Каждый сенсорный переключатель 136a-d блокировки может быть выполнен с возможностью сохранения разомкнутого (т.е. непроводящего) состояния переключателя или замкнутого (т.е. проводящего) состояния переключателя в ответ на, соответственно, наличие или отсутствие соответствующего условия. Любое из соответствующих условий, если оно имеет место, когда осуществляют выстреливание из инструмента 10, может иметь следствием неудовлетворительную операцию разрезания и сшивания скобками и/или повреждение инструмента 10. Условия, на которые могут реагировать сенсорные переключатели 136a-d блокировки, включают в себя, например, (a) отсутствие кассеты 34 для скобок в желобе 22, (b) присутствие использованной (например, ранее отработанной) кассеты 34 для скобок в желобе 22 и (c) разомкнутое (или иначе неудовлетворительно сомкнутое) положение упора 24 относительно желоба 22. Другие условия, на которые могут реагировать сенсорные переключатели 136a-d блокировки, например износ компонентов, можно предположить с учетом суммарного числа операций выстреливания, выполненных инструментом 10. Соответственно, в различных вариантах осуществления, если существуют любые из упомянутых условий, то соответствующие сенсорные переключатели 136a-d блокировки сохраняют разомкнутое состояние переключения и тем самым не допускают протекание тока, необходимого для включения работы электродвигателя 65. Пропускание тока сенсорными переключателями 136a-d блокировки возможно в различных вариантах осуществления только после того, как устранены все упомянутые условия. Следует понимать, что вышеописанные условия приведены только для примера и что можно обеспечить дополнительные сенсорные переключатели блокировки для реагирования на другие условия, причиняющие вред работе инструмента 10. Аналогично, следует понимать, что в вариантах осуществления, в которых, по меньшей мере, одно из вышеописанных условий может отсутствовать или не имеет значения, число сенсорных переключателей 136a-d блокировки может быть меньше, чем показано.
Как показано на фиг.11, сенсорный переключатель 136a блокировки можно реализовать с использованием конфигурации нормально-разомкнутого переключателя, чтобы замкнутое состояние переключения поддерживалось, когда кассета 34 для скобок находится в положении, соответствующем ее надлежащему вмещению в желоб 22. Когда кассета 34 для скобок не установлена в желоб 22 или установлена неправильно (например, с нарушением центрировки), сенсорный переключатель 136a блокировки сохраняет разомкнутое состояние переключения. Сенсорный переключатель 136b блокировки можно реализовать с использованием конфигурации нормально-разомкнутого переключателя, чтобы замкнутое состояние переключения сохранялось, только когда в желобе 22 присутствует неиспользованная кассета 34 для скобок (т.е. кассета 34 для скобок, содержащая скользящий блок 33 в неотработанном положении). Присутствие отработанной кассеты 34 для скобок в желобе 22 вынуждает сенсорный переключатель 136b блокировки оставаться в разомкнутом состоянии переключения. Сенсорный переключатель 136c блокировки можно реализовать с использованием конфигурации нормально-разомкнутого переключателя, чтобы замкнутое состояние переключения сохранялось, когда упор 24 находится в сомкнутом положении относительно желоба 22. Сенсорный переключатель 136c блокировки может работать с управлением по устройству задержки времени, при этом замкнутое состояние переключения поддерживается только после того, как упор 24 будет находиться в сомкнутом положении в течение предварительно заданного периода времени.
Сенсорный переключатель 136d блокировки можно реализовать с использованием конфигурации нормально замкнутого переключателя, чтобы замкнутое состояние переключения поддерживалось только в том случае, когда суммарное число выстреливаний, произведенных инструментом 10, имеет значение меньше предварительно заданного числа. Сенсорный переключатель 136d блокировки может сообщаться со счетчиком 139, выполненным с возможностью ведения счета, характеризующего суммарное число выстреливаний, произведенных инструментом 10, сравнения сосчитанного числа с заданным числом и управления состоянием переключения сенсорного переключателя 136d блокировки по результатам сравнения. Следует понимать, что счетчик 139, хотя и показан отдельно на фиг.11, может быть объединенным с сенсорным переключателем 136d блокировки для формирования общего устройства. В предпочтительном варианте, счетчик 139 реализован в виде электронного устройства, имеющего вход для увеличения сохраненного сосчитанного числа на основании перехода дискретного электрического сигнала, подаваемого в данное устройство. Следует понимать, что, вместо описанного, можно применить механический счетчик, выполненный с возможностью ведения счета на основании механического входного сигнала (например, отвода выстреливающего спускового механизма 20). В случае реализации в виде электронного устройства, любой дискретный сигнал, присутствующий в электрической схеме, который совершает переход один раз при каждой операции выстреливания, можно использовать как входной сигнал счетчика 139. Например, как показано на фиг.11, можно использовать дискретный электрический сигнал, получаемый в результате срабатывания датчика 130 конца хода. Счетчик 139 может управлять состоянием переключения сенсорного переключателя 136d блокировки таким образом, чтобы замкнутое состояние переключения поддерживалось, когда сохраненное сосчитанное число меньше, чем предварительно заданное число, хранимое в счетчике 139. Когда сохраненное сосчитанное число становится равным предварительно заданному числу, счетчик 139 предписывает сенсорному переключателю 136d блокировки поддерживать разомкнутое состояние переключения и тем самым не допускать протекание тока через него. Следует понимать, что предварительно заданное число, хранимое счетчиком 139, можно селективно настраивать по требованию. В соответствии с различными вариантами осуществления счетчик 139 может сообщаться с внешним дисплеем (не показанным), например LCD (жидкокристаллическим) дисплеем, встроенным в инструмент 10 для указания пользователю либо хранимого сосчитанного числа, либо разности между предварительно заданным числом и хранимым сосчитанным числом.
В соответствии с различными вариантами осуществления, цепь 137 блокировки может содержать, по меньшей мере, один индикатор, доступный для наблюдения пользователем инструмента 10 для отображения состояния, по меньшей мере, одного из сенсорных переключателей 136a-d блокировки. Более подробные сведения, касающиеся таких индикаторов, можно найти в опубликованной заявке на патент США 2007/0175956, «Electronic lockouts and surgical instrument including same», которая целиком включена в настоящее описание посредством ссылки. Данная заявка содержит также примерные монтажные схемы расположения и конфигурации для сенсорных переключателей 136a-d блокировки.
В изображенном варианте осуществления, когда сенсорные переключатели 136a-d блокировки совместно сохраняют замкнутое состояние переключения, однополюсное однопозиционное реле 138 находится под напряжением. Когда реле 138 находится под напряжением, ток протекает через реле 138, через сенсорный переключатель 110 работы электродвигателя и через двухполюсное двухпозиционное реле 140 в электродвигатель 65 и тем самым питает электродвигатель 65 и обеспечивает его вращение в правом направлении. В соответствии с различными вариантами осуществления, поскольку выходной сигнал реле 138, после подачи на него напряжения, поддерживает реле 138 в возбужденном состоянии, пока не подается напряжение в реле 132, то цепь 137 блокировки не будет выполнять функцию блокировки работы электродвигателя 165 после начала, даже если, по меньшей мере, один из сенсорных переключателей 136a-d блокировки впоследствии придет в разомкнутое состояние переключения. Однако, в других вариантах осуществления, может быть необходимо или иначе желательно соединить цепь 137 блокировки и реле 138 так, чтобы, по меньшей мере, один из сенсорных переключателей 136a-d блокировки должен был сохранять замкнутое состояние переключения, чтобы поддерживать работу электродвигателя 165 после начала.
Вращение электродвигателя в правом направлении вынуждает кольцо 84 перемещаться в дистальном направлении и тем самым выключать сенсорный переключатель 142 останова электродвигателя в различных вариантах осуществления. Так как переключатель 142 является нормально замкнутым, электромагнит 141, подключенный к переключателю 142, может находиться под напряжением. Электромагнит 141 может быть обычным нажимным соленоидом, который, под напряжением, вызывает аксиальное выдвижение плунжера (не показанного). Выдвижение плунжера может выполнять функцию фиксации смыкающего спускового механизма 18 в отведенном назад положении и предотвращения тем самым размыкания упора 24 в то время, когда выполняется операция выстреливания (т.е. в то время, когда переключатель 142 не включен). После обесточивания электромагнита 141 плунжер отводится назад, чтобы возможно было ручное отпускание смыкающего спускового механизма 18.
Когда концевой эффектор 12 достигнет конца своего хода, датчик 130 реверса электродвигателя включится, и тем самым переключатель 130 замкнется, и реле 132 получит питание. В результате этого реле 132 переключается в его возбужденное состояние (не показанное на фиг.11), что приводит к протеканию тока в обход цепи 137 блокировки и датчика 110 работы электродвигателя и, вместо этого, вынуждает ток протекать как через нормально замкнутое двухполюсное двухпозиционное реле 140, так и обратно в электродвигатель 65, но таким образом через реле 140, что вызывает реверс направления вращения электродвигателя 65. Поскольку сенсорный переключатель 142 останова электродвигателя является нормально замкнутым, ток будет протекать обратно в реле 132 и тем самым удерживать его под напряжением, пока переключатель 142 не разомкнется. Когда нож 32 полностью отведен, сенсорный переключатель 142 останова электродвигателя срабатывает и тем самым вызывает размыкание переключателя 142, с выключением тем самым питания электродвигателя 65 и снятием напряжения с соленоида 141.
В других вариантах осуществления можно применить другие альтернативные решения для ограничения тока, подаваемого на электродвигатель 65 в течение некоторых периодов времени на протяжении цикла разрезного хода. Другие варианты осуществления описаны в заявке на патент США № 12/235,782, которая целиком включена в настоящее описание посредством ссылки.
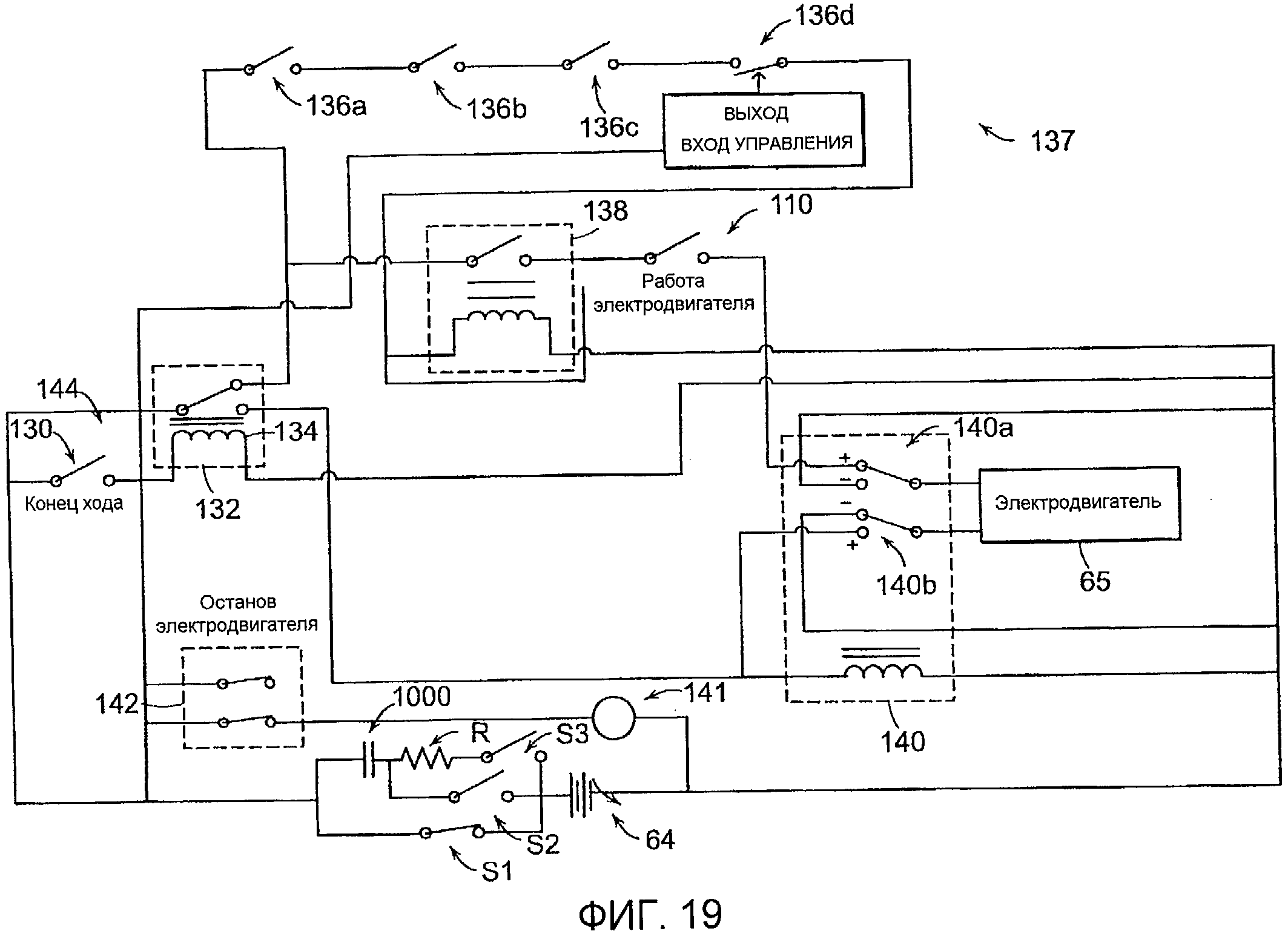
В некоторых случаях, возможно, было бы целесообразно обеспечить кратковременное усиление тока, подаваемого на электродвигатель 65, для усиления выходного вращательного момента. На фиг.19 показан вариант осуществления схемы для обеспечения кратковременного усиления тока, подаваемого на электродвигатель 65, в соответствии с различными вариантами осуществления. Схема аналогична схеме, показанной на фиг.11, за тем исключением, что схема, показанная на фиг.19, дополнительно содержит устройство 1000 накопления заряда, подсоединенное к источнику питания 64. Устройство 1000 накопления заряда может быть любым устройством, которое может хранить заряд, например конденсатором. Например, устройство 1000 накопления заряда может содержать ультраконденсатор (иногда называемый суперконденсатором). Когда электродвигатель 65 первоначально включают, например, когда переключатель 110 замыкается вследствие отвода выстреливающего спускового механизма 20, переключатель S1 может быть замкнутым, и поэтому батарея 64 может питать электродвигатель 65, как описано выше. Кроме того, переключатель S3 также может быть замкнутым, лишь в течение короткого периода времени («периода зарядки») для зарядки устройства 1000 накопления заряда через сопротивление R1. Например, в соответствии с различными вариантами осуществления, переключатель S3 может быть замкнутым в течение одной-десяти постоянных времени RC-цепи, где R равно величине сопротивления R1 и С равно емкости устройства 1000 накопления заряда.
Заряд в устройстве 1000 накопления заряда может оставаться неиспользованным в нормальном режиме работы, но если наступает момент в ходе операции, когда врач нуждается в дополнительном выходном вращательном моменте электродвигателя 65, то устройство 1000 накопления заряда можно подключить последовательно с батареей 64. Такое подключение можно осуществить, например, размыканием переключателя S1 и замыканием переключателя S2 (с переключателем S3, остающимся разомкнутым после периода зарядки). При замыкании переключателя S2 устройство 1000 накопления заряда будет подключаться последовательно с батареей 64 и тем самым подводить дополнительный ток на электродвигатель 65.
Условие потребности в устройстве 1000 накопления заряда может определяться множеством способов. Например, к выстреливающему спусковому механизму 20 можно подсоединить переменное сопротивление или пружину 20. Когда выстреливающий спусковой механизм отводят за некоторую точку или с усилием выше порогового уровня, устройство 1000 накопления заряда может подключаться последовательно с батареей 64. В дополнение или в качестве альтернативы, рукоятка 6 может содержать внешний переключатель (не показанный), который может быть задействован врачом для включения устройства 1000 накопления заряда последовательно с батареей 64.
Устройство 1000 накопления заряда можно применять с токоограничивающими устройствами, описанными в связи с фиг.11, или без таких устройств.
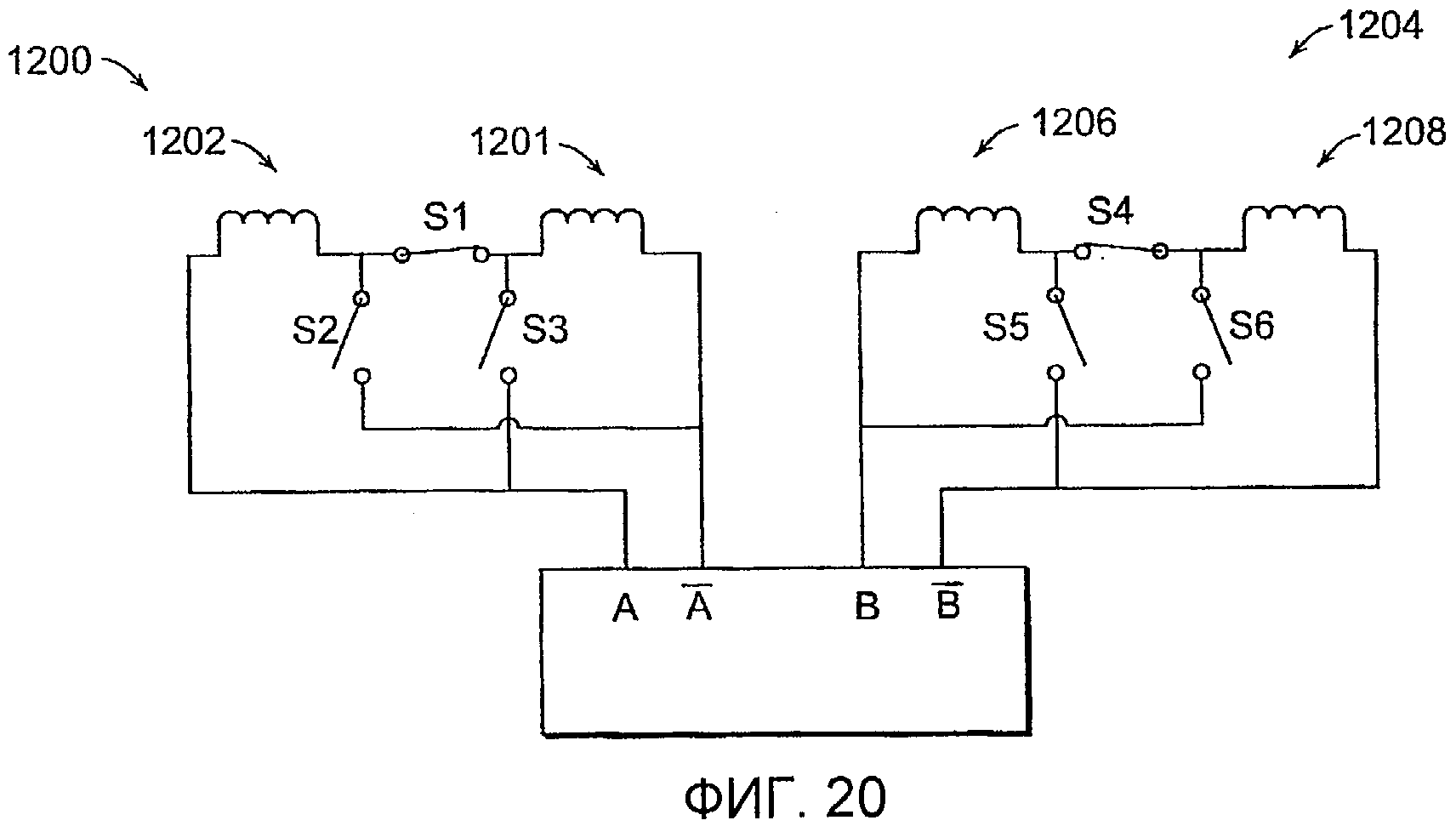
Иногда, во время использования инструмента 10, возможно было бы полезно, чтобы электродвигатель 65 вращался с высокой частотой, при относительно низком выходном вращательном моменте. В другое время, возможно, было бы желательно, чтобы электродвигатель 65 развивал высокий выходной вращательный момент, при низких частотах вращения. В соответствии с различными вариантами осуществления, данную функциональную возможность может обеспечивать электродвигатель 65, содержащий несколько (например, по меньшей мере, две) обмотки, как показано на фиг.20. В показанном варианте осуществления электродвигатель содержит две обмотки. Первая обмотка 1200 может содержать половины (или участки) 1201 и 1202 обмотки. Вторая обмотка 1204 может содержать половины (или участки) 1206 и 1208 обмотки. Электродвигатель 65 в данном примере может быть 6- или 8-выводным электродвигателем с биполярной схемой 1210 управления (смотри, например, фиг.11 и 12). Когда желателен высокооборотный режим с низким вращательным моментом, две группы обмоток можно соединять последовательно. В таком режиме, как показано на фиг.20, переключатели S1 и S4 замкнуты, и переключатели S2, S3, S5 и S6 разомкнуты. Когда желателен низкооборотный режим с высоким вращательным моментом, две группы обмоток можно соединять параллельно. В данном режиме переключатели S1 и S4 разомкнуты и переключатели S2, S3, S5 и S6 замкнуты. Возможность переключения между двумя режимами, фактически, создает двухскоростную трансмиссию без дополнительных подвижных частей. Данная возможность позволяет также одному электродвигателю развивать как высокие частоты вращения, так и высокие выходные вращательные моменты, хотя и не в одно время. Преимущество данной конфигурации состоит в том, что она исключает применение нескольких электродвигателей. Кроме того, создается возможность исключения некоторых зубчатых передач, так как электродвигатель 65 может развивать дополнительный вращательный момент, когда работает в параллельном режиме, и дополнительную частоту вращения, когда работает в последовательном режиме. Кроме того, можно применить дополнительные обмотки, чтобы можно было реализовать большее число рабочих режимов. Например, могут быть обмотки для нескольких комбинаций последовательных и параллельных соединений обмоток. Кроме того, некоторые обмотки можно использовать для измерения режимов электродвигателя и т.п.
В соответствии с различными вариантами осуществления рукоятка 6 может содержать внешний переключатель 1220 выбора режима работы электродвигателя, как показано на фиг.21. С помощью переключателя 1220, оператор инструмента 10 может выбирать высокооборотный режим электродвигателя 65 с низким вращательным моментом или низкооборотный режим с высоким вращательным моментом. Для переключения электродвигателя 65 между рабочими режимами можно также использовать другие схемы переключения, например схемы переключения, которые автоматически переключают режим электродвигателя на основе входных сигналов датчиков.
В моторизованном хирургическом инструменте, например одном из моторизованных эндоскопических инструментов, описанных выше, или в механизированном циркулярном режущем инструменте, электродвигатель может получать питание от нескольких батарейных элементов, соединенных последовательно. Кроме того, возможно, в некоторых обстоятельствах было бы желательно подавать питание на электродвигатель от некоторой части от общего числа батарейных элементов. Например, как показано на фиг.12, электродвигатель 65 может получать питание от модуля 299 питания, содержащего шесть (6) батарейных элементов 310, соединенных последовательно. Батарейные элементы 310 могут быть, например, 3-вольтовыми литиевыми батарейными элементами, например батарейными элементами CR 123A, однако в других вариантах осуществления можно применять батарейные элементы других типов (включая батарейные элементы с другими уровнями напряжения и/или другими химическими составами). Если для питания электродвигателя 65 последовательно соединили шесть 3-вольтовых батарейных элементов 310, то суммарное напряжение, которое может быть подано на электродвигатель 65, будет составлять 18 вольт. Батарейные элементы 310 могут содержать подзаряжаемые или неподзаряжаемые батарейные элементы.
В упомянутом варианте осуществления, при самых больших нагрузках, входное напряжение, подаваемое на электродвигатель 65, может снижаться до, приблизительно, девяти-десяти вольт. В данных условиях эксплуатации, модуль 299 питания подает максимальную мощность на электродвигатель 65. Соответственно, как показано на фиг.12, схема может содержать переключатель 312, который селективно допускает питание электродвигателя 65 либо с помощью (1) всех батарейных элементов 310, либо (2) части батарейных элементов 310. Как показано на фиг.12, при надлежащем выборе, переключатель 312 может допускать питание электродвигателя 65 от всех шести батарейных элементов или четырех из батарейных элементов. При этом переключатель 312 можно использовать для подачи на электродвигатель 65 либо 18 вольт (при использовании всех шести батарейных элементов 310), либо 12 вольт (при использовании четырех вторичных батарейных элементов). В различных вариантах осуществления конструктивный выбор числа батарейных элементов в качестве части от них, которая служит для подачи питания на электродвигатель 65, может быть основан на напряжении, которое необходимо электродвигателю 65 во время работы с максимальной выходной мощностью при самых больших нагрузках.
Переключатель 312 может быть, например, электромеханическим переключателем, например микропереключателем. В других вариантах осуществления переключатель 312 можно реализовать с помощью твердотельного переключателя, например транзистора. Второй переключатель 314, например кнопочный переключатель, можно использовать для управления вообще подачей какого-либо питания на электродвигатель 65. Кроме того, реверсивный переключатель 316 может служить для управления вращением электродвигателя 65 в правом направлении или реверсном направлении. Реверсивный переключатель 316 можно реализовать с помощью двухполюсного переключателя на два положения, например реле 140, показанного на фиг.11.
Во время работы пользователь инструмента 10 может выбирать требуемый уровень мощности с помощью некоего ручного переключающего управляющего устройства, например такого позиционно-зависимого переключателя (не показанного), как тумблер, механический рычажный переключатель или кулачок, который управляет положением переключателя 312. Затем пользователь может включить второй переключатель 314 для подключения выбранных батарейных элементов 310 к электродвигателю 65. Кроме того, схему, показанную на фиг.12, можно использовать для подачи питания на электродвигатель моторизованных хирургических инструментов других типов, например циркулярных режущих инструментов и/или лапароскопических инструментов. Более подробные сведения о циркулярных режущих инструментах можно найти в опубликованных заявках на патенты США № 2006/0047307 A1 и № 2007/0262116 A1, которые включены в настоящее описание посредством ссылки.
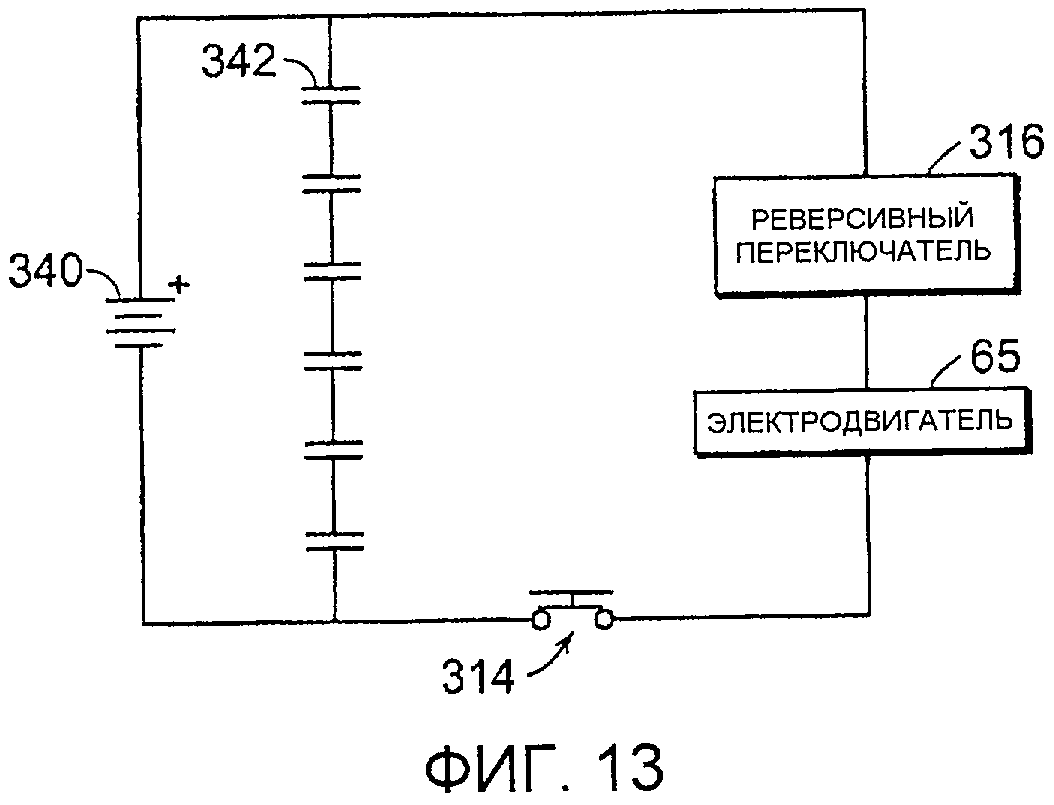
В других вариантах осуществления, как показано на фиг.13, первичный источник 340 питания, например такой батарейный элемент, как батарейный элемент CR2 или CR123A, можно применять для зарядки нескольких вторичных накопительных устройств 342. Первичный источник 340 питания может содержать один или несколько последовательно включенных батарейных элементов, которые предпочтительно являются сменными в показанном варианте осуществления. Вторичные накопительные устройства 342 могут содержать, например, подзаряжаемые батарейные элементы и/или суперконденсаторы (также известные «ультраконденсаторы» или «электрохимические двухслойные конденсаторы» (EDLC)). Суперконденсаторы являются электрохимическими конденсаторами, которые обладают необычно высокой плотностью энергии в сравнении с обычными электролитическими конденсаторами, как правило, порядка в тысячи раз большей, чем электролитические конденсаторы большой емкости.
Первичный источник 340 питания может заряжать вторичные накопительные устройства 342. После достаточной зарядки первичный источник 340 питания можно снять и вторичные накопительные устройства 342 можно использовать для питания электродвигателя 65 в ходе процедуры или операции. Накопительные устройства 342 могут заряжаться за время приблизительно от пятнадцати до тридцати минут в различных обстоятельствах. Суперконденсаторы обладают характеристикой, позволяющей им заряжаться и разряжаться исключительно быстро по сравнению с традиционными батареями. Кроме того, если батареи сохраняют удовлетворительные характеристики лишь при ограниченном числе циклов зарядки/разрядки, то суперконденсаторы часто могут заряжаться/разряжаться много раз, иногда, на протяжении десятков миллионов циклов. В вариантах осуществления, использующих суперконденсаторы в качестве вспомогательных накопительных устройств 342, суперконденсаторы могут содержать углеродные нанотрубки, проводящие полимеры (например, полиацены) или углеродные аэрогели.
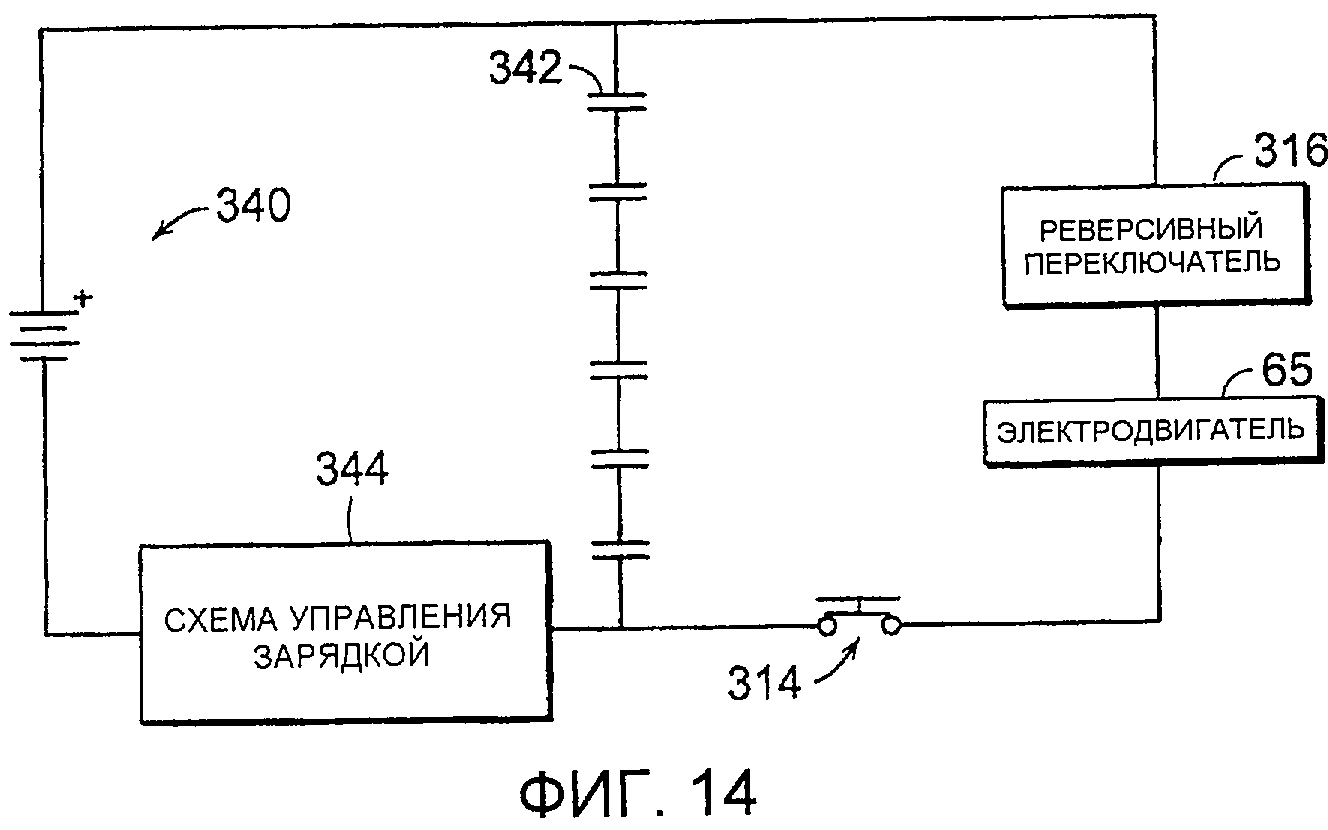
Как показано на фиг.14, для определения момента, когда вторичные накопительные устройства 342 достаточно зарядились, можно применить схему 344 управления зарядкой. Схема 344 управления зарядкой может содержать индикатор, например, по меньшей мере, один LED (светоизлучающий диод), LCD (жидкокристаллический) дисплей и т.п., который включается для предупреждения пользователя инструмента 10 о том, когда вторичные накопительные устройства 342 достаточно зарядились.
Первичный источник 340 питания, вторичные накопительные устройства 342 и схема 344 управления зарядкой могут входить в состав модуля питания в участке 26 ручки пистолетного типа рукоятки 6 инструмента 10 или в другой части инструмента 10. Модуль питания может извлекаться из участка 26 ручки пистолетного типа, и при этом, когда инструмент 10 планируется применить для хирургического вмешательства, модуль питания может быть стерильным методом вставлен в участок 26 ручки пистолетного типа (или другое положение в инструменте в соответствии с другими вариантами осуществления), например, медсестрой, ассистирующей при операции и ответственной за безопасность пациента. После вставки модуля питания медсестра может поместить сменный первичный источник 340 питания в модуль питания для подзарядки вторичных накопительных устройств 342 на некоторый период времени до использования инструмента 10, например на тридцать минут. Когда вторичные накопительные устройства 342 заряжаются, схема 344 управления зарядкой может указывать, что модуль питания готов к использованию. С этого момента сменный первичный источник 340 можно снять. После этого, во время работы, пользователь инструмента 10 может включить электродвигатель 65, например, включением переключателя 314, и после этого вторичные накопительные устройства 342 подают питание на электродвигатель 65. Таким образом, вместо применения нескольких одноразовых батарей для питания электродвигателя 65, в данном варианте осуществления можно воспользоваться одной одноразовой батареей (в качестве первичного источника 340 питания), и вторичные накопительные устройства 342 могут быть пригодными для многократного использования. Однако следует отметить, что, в альтернативных вариантах осуществления, вторичные накопительные устройства 342 могут быть неподзаряжаемыми и/или непригодными для многократного использования. Вторичные накопительные устройства 342 можно применять с переключателем 312 для переключения элементов, описанным выше в связи с фиг.12.
Схема 344 управления зарядкой также может содержать индикаторы (например, LED (светоизлучающие диоды) или LCD-дисплей), которые указывают заряд, который остается во вторичных накопительных устройствах 342. При этом хирург (или другой пользователь инструмента 10) может следить за величиной заряда, который остается, в течение процедуры, связанной с применением инструмента 10.
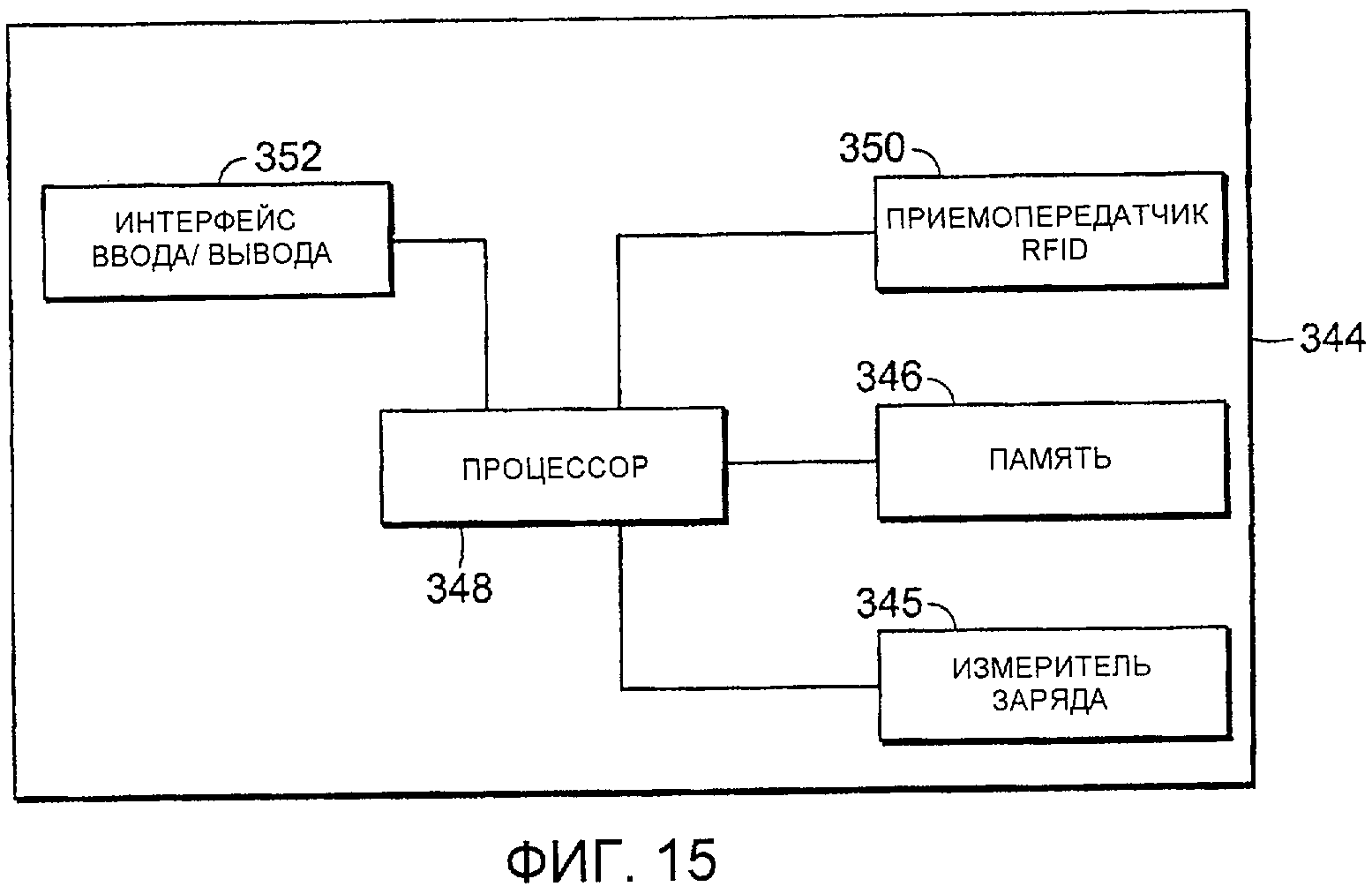
Схема 344 управления зарядкой, как показано на фиг.15, может содержать измеритель 345 заряда для измерения заряда во вторичных накопительных устройствах 342. Схема 344 управления зарядкой может также содержать энергонезависимую память 346, например флэш-память или ROM (постоянную память), и, по меньшей мере, один процессор 348. Процессор(ы) 348 может соединяться с памятью 346 для управления памятью. Кроме того, процессор(ы) 348 может иметь соединение с измерителем 345 заряда для считывания показаний или иного управления измерителем 345 заряда. В дополнение, процессор(ы) 348 может управлять LED или другими устройствами вывода схемы 344 управления зарядкой. Процессор(ы) 348 могут сохранять параметры инструмента 10 в памяти 346. Параметры могут содержать рабочие параметры инструмента, которые измеряются различными датчиками, которые можно установить или использовать в инструменте 10, например такие параметры, как количество выстреливаний, уровни прилагаемых усилий, расстояние зазора при сдавливании между противоположными зажимами концевого эффектора 12, величина шарнирного поворота и т.п. Кроме того, параметры, сохраняемые в памяти 346, могут содержать ID (идентификационные) значения для различных компонентов инструмента 10, которые может считывать и сохранять схема 344 управления зарядкой. Компоненты, имеющие упомянутые ID, могут быть сменными компонентами, как, например, кассета 34 для скобок. ID могут быть, например, RFID (высокочастотными идентификаторами), которые схема 344 управления зарядкой считывает посредством приемопередатчика RFID 350. Приемопередатчик RFID 350 может считывать RFID с компонентов инструмента, например кассеты 34 для скобок, которая содержит RFID-метки. ID-значения могут считываться, сохраняться в памяти 346 и сравниваться процессором 348 со списком допустимых ID-значений, хранящихся в памяти 346 или другом запоминающем устройстве, связанном со схемой управления зарядкой, чтобы определять, например, аутентичен и/или подходит ли съемный/сменный компонент, соответствующий считанному ID-значению. В соответствии с различными вариантами осуществления, если процессор 348 определяет, что съемный/сменный компонент, соответствующий считанному ID-значению не аутентичен, то схема 344 управления зарядкой может не допустить использования модуля питания инструментом 10, например, посредством размыкания переключателя (не показанного), который предотвратит подачу питания из модуля питания на электродвигатель 65. В соответствии с различными вариантами осуществления, различные параметры, которые процессор 348 может оценивать для определения, аутентичен и/или подходит ли компонент, включают в себя: код даты; модель/тип компонента; производителя; региональную информацию; и коды предыдущих ошибок.
Схема 344 управления зарядкой может также содержать интерфейс 352 ввода/вывода для связи с другим устройством, например, описанным ниже. При этом параметры, сохраненные в памяти 346, можно загружать в другое устройство. Интерфейс 352 ввода/вывода может быть, например, проводным или беспроводным интерфейсом.
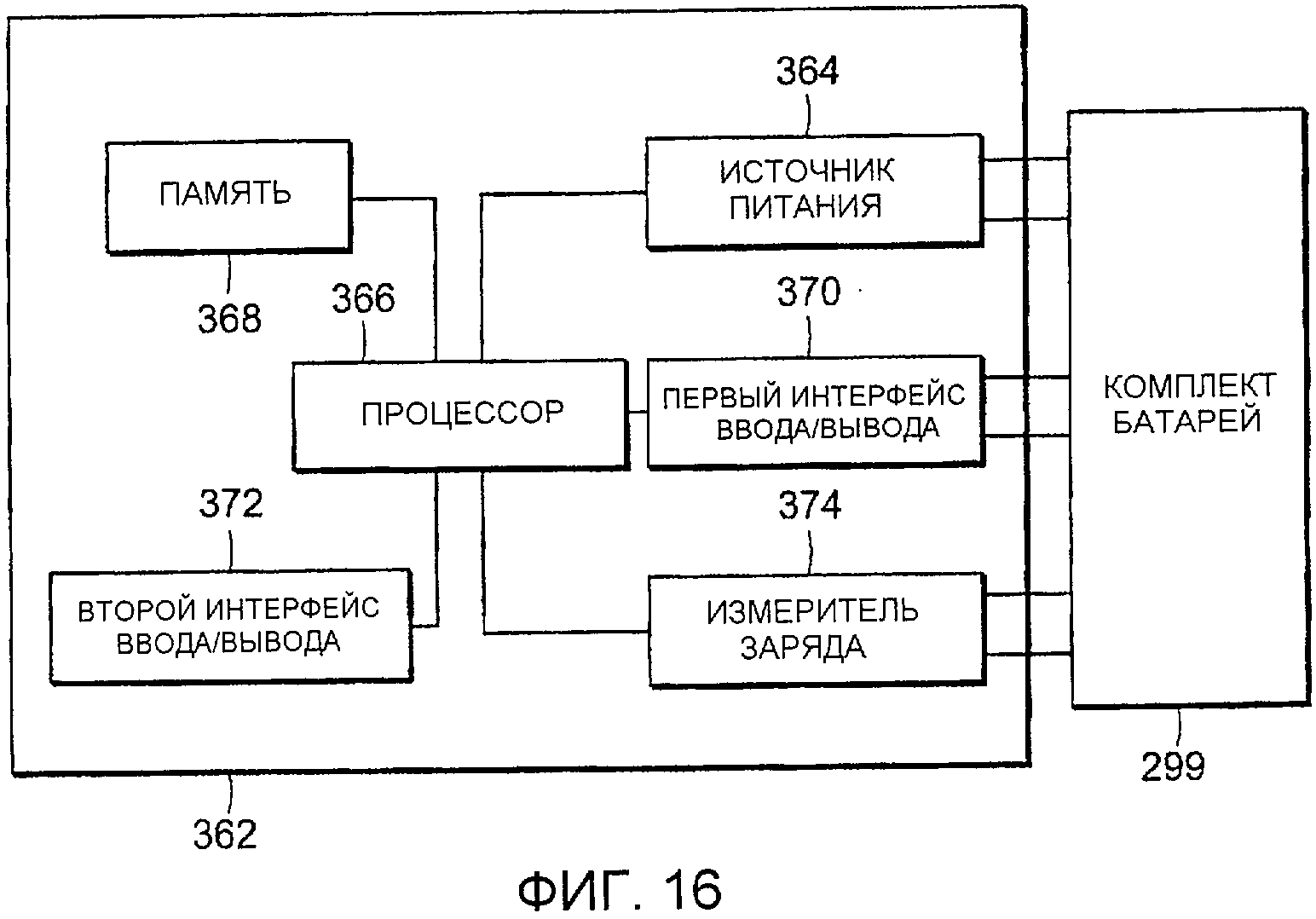
Как упоминалось выше, модуль питания может содержать вторичные накопительные устройства 342, схему 344 управления зарядкой и/или реверсивный переключатель 316. В соответствии с различными вариантами осуществления, как показано на фиг.16, модуль 299 питания может быть соединен с основным зарядным устройством 362, которое может, помимо прочего, заряжать вторичные накопительные устройства 342 в модуле питания. Основное зарядное устройство 362 можно подсоединять к модулю 299 питания путем подсоединения стерильным методом основного зарядного устройства 362 к модулю 299 питания, когда модуль питания установлен в инструмент 10. В других вариантах осуществления, в которых модуль питания является съемным, основное зарядное устройство 362 можно подсоединять к модулю 299 питания путем извлечения модуля 299 питания из инструмента 10 и его подсоединения к основному зарядному устройству 362. В данных вариантах осуществления, после того как основное зарядное устройство 362 в достаточной мере заряжает вторичные накопительные устройства 342, модуль 299 питания можно устанавливать стерильным методом в инструмент 10.
Как показано на фиг.16, основное зарядное устройство 362 может содержать источник 364 питания для зарядки вторичных накопительных устройств 342. Источник 364 питания основного зарядного устройства 362 может быть, например, батареей (несколькими последовательно соединенными батареями), или преобразователем переменного тока в постоянный, который преобразует переменный ток, например, из электрической сети, в постоянный ток, или любым другим подходящим источником питания для зарядки вторичных накопительных устройств 342. Основное зарядное устройство 362 может также содержать индикаторные устройства, например LED, LCD-дисплей и т.п., чтобы показывать статус зарядки вторичных накопительных устройств 342.
Кроме того, как показано на фиг.16, основное зарядное устройство 362 может содержать, по меньшей мере, один процессор 366, по меньшей мере, один блок 368 памяти и интерфейсы 370, 372 ввода/вывода. Основное зарядное устройство 362 может связываться, через первый интерфейс 370 ввода/вывода, с модулем 299 питания (через интерфейс 372 ввода/вывода модуля питания). При этом, например, данные, хранящиеся в памяти 346 модуля 299 питания, могут загружаться в память 368 основного зарядного устройства 362. В результате, процессор 366 может оценивать ID-значения съемных/сменных компонентов, загружаемые из схемы 344 управления зарядкой, чтобы определять аутентичность и пригодность компонентов. Рабочие параметры, загружаемые из схемы 344 управления зарядкой, могут также сохраняться в памяти 368 и затем загружаться в другое компьютерное устройство через второй интерфейс 372 ввода/вывода для оценки и анализа, например, больничной системой, в которой выполняется операция с применением инструмента 10, в хирургическом отделении, дистрибьютором инструмента, изготовителем инструмента и т.п.
Основное зарядное устройство 362 также может содержать измеритель 374 заряда для измерения заряда во вторичных накопительных устройствах 342. Измеритель 374 заряда может быть связан с процессором(рами) 366 так, что процессор(ы) 366 может определять в реальном времени пригодность модуля 299 питания для использования, чтобы обеспечивать высокую эффективность.
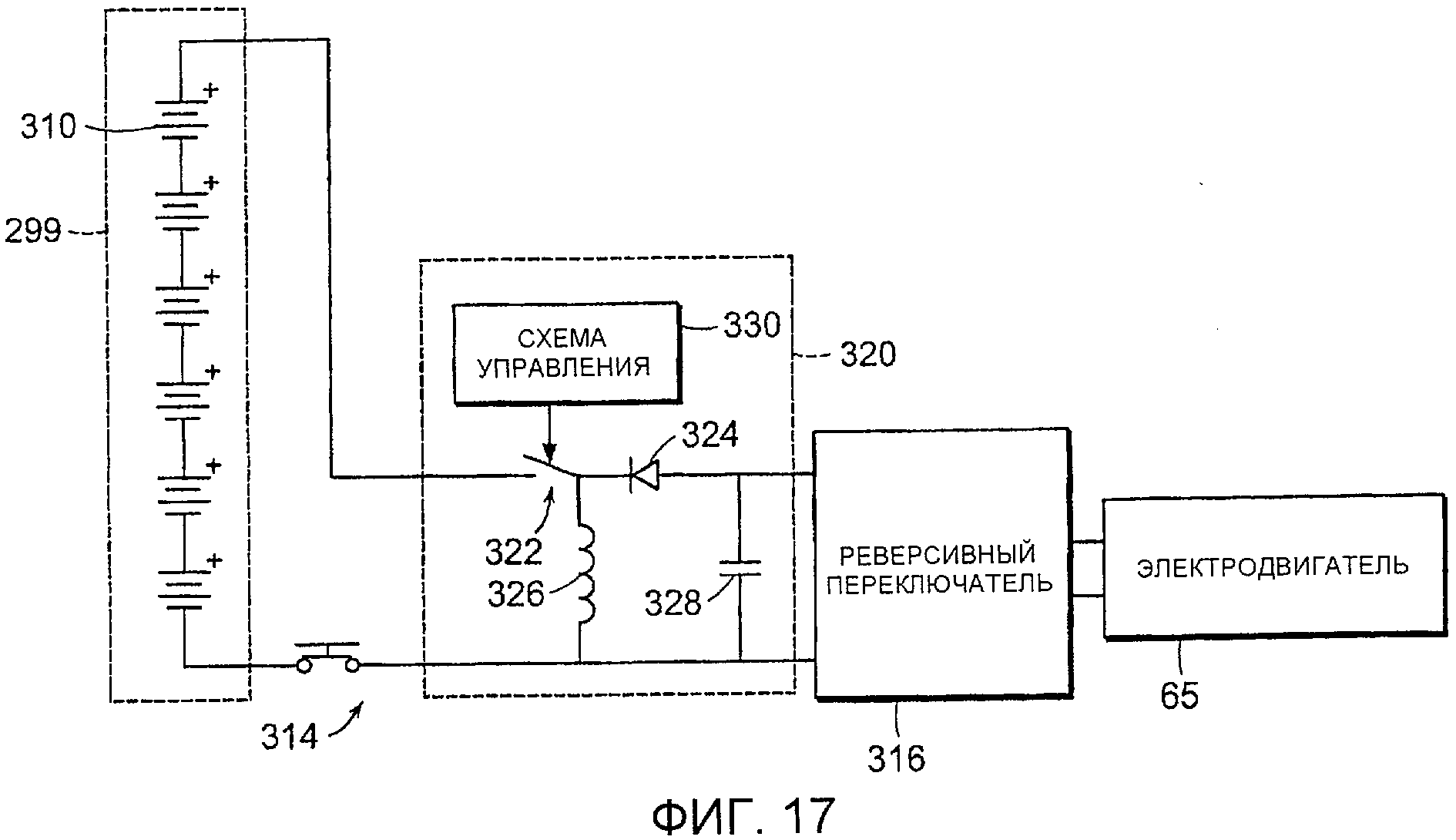
В другом варианте осуществления, как показано на фиг.17, схема батареи может содержать регулятор 320 мощности для управления питанием, подаваемым устройствами 310 хранения мощности в электродвигатель 65. Регулятор 320 мощности может также входить в состав модуля 299 питания или может быть отдельным компонентом. Как упоминалось выше, электродвигатель 65 может быть щеточным электродвигателем. Частота вращения щеточных электродвигателей обычно пропорциональна подаваемому входному напряжению. Регулятор 320 мощности может подавать на электродвигатель 65 выходное напряжение с высокой степенью стабилизации, так что электродвигатель 65 будет работать с постоянной (или, по существу, постоянной) частотой вращения. В соответствии с различными вариантами осуществления, регулятор 320 мощности может содержать импульсный преобразователь мощности, например промежуточный вольтодобавочный преобразователь, как показано в примере на фиг.17. Упомянутый промежуточный вольтодобавочный преобразователь 320 может содержать переключатель 322 питания, например FET (полевой транзистор), выпрямительное устройство 32, дроссель 326 и конденсатор 328. Когда переключатель 322 питания включен, источник входного напряжения (например, источники 310 питания) непосредственно подключен к дросселю 326, который хранит энергию в данном состоянии. В данном состоянии, конденсатор 328 подает энергию в выходную нагрузку (например, электродвигатель 65). Когда регулятор 320 мощности находится в выключенном состоянии, дроссель 326 включен на выходную нагрузку (например, электродвигатель 65) и конденсатор 328, и поэтому энергия передается из дросселя 326 в конденсатор 328 и нагрузку 65. Схема 330 управления может управлять переключателем 322 питания. В схеме 330 управления могут применяться цифровые и/или аналоговые управляющие контуры. Кроме того, в других вариантах осуществления, схема 330 управления может получать управляющую информацию из ведущего контроллера (не показанного) по каналу связи, например последовательной или цифровой шине данных. Уставку напряжения на выходе регулятора 320 мощности можно настроить, например, на половину напряжения разомкнутой цепи, и тогда можно получить максимальную мощность, которую способен обеспечить источник.
В других вариантах осуществления можно применять отличающие топологии преобразователя мощности, в том числе линейные или импульсные преобразователи мощности. Другие импульсные топологии, которые можно использовать, включают в себя обратную, прямую, вольтодобавочную топологии и топологию SEPIC. Напряжение уставки для регулятора 320 мощности можно изменять в зависимости от того, сколько батарейных элементов применяется для питания электродвигателя 65. Кроме того, регулятор 320 мощности можно использовать с вторичными накопительными устройствами 342, показанными на фиг.13. Кроме того, реверсивный переключатель 316 может быть встроен в регулятор 320 мощности, хотя на фиг.17 данные компоненты показаны раздельными.
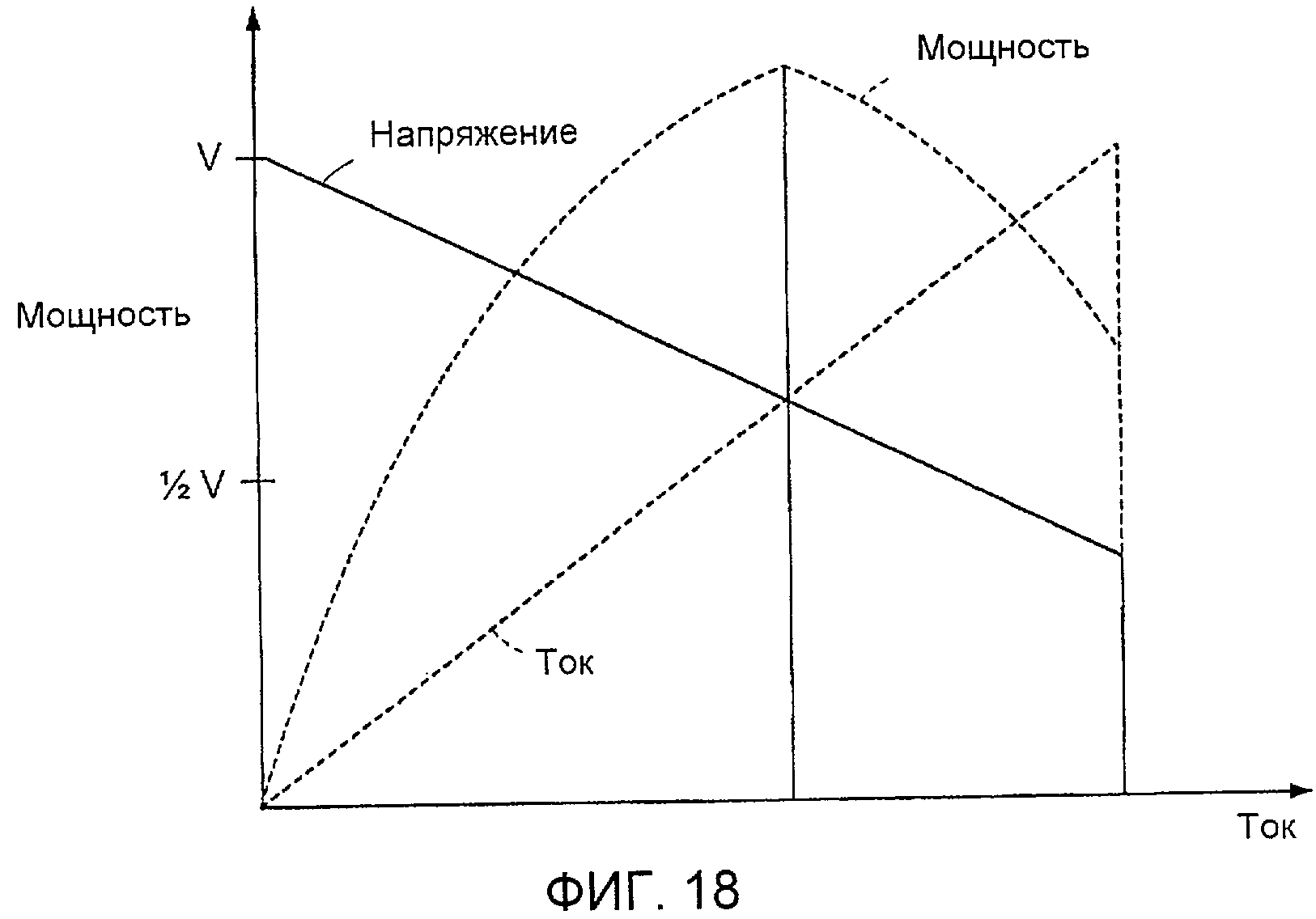
Батареи обычно можно моделировать как идеальный источник напряжения и сопротивления источника. В идеальной модели, когда источник и сопротивление нагрузки согласованы, в нагрузку передается максимальная мощность. На фиг.18 показана типичная кривая мощности батареи. Когда цепь батареи разомкнута, напряжение на батарее является высоким (равным значению напряжения холостого хода), и ток, отбираемый от батареи, равен нулю. Мощность, подводимая из батареи, также равна нулю. Чем больший ток отбирается из батареи, тем меньше напряжение на батареи. Мощность, подводимая батареей, является произведением тока и напряжения. Мощность достигает своего максимума около уровня напряжения, который меньше, чем напряжение холостого хода. Как показано на фиг.18, для батарей с большинством химических составов происходит резкое падение напряжения/мощности при более сильном токе из-за химического состава или положительного температурного коэффициента (PTC) или из-за устройства защиты батареи.
В частности, в вариантах осуществления с использованием батареи (или батарей) для питания электродвигателя 65 во время процедуры, схема 330 управления может контролировать выходное напряжение и управлять уставкой регулятора 320 так, чтобы батарея работала на «левой» или восходящей стороне кривой мощности. Если батарея достигает уровня максимальной мощности, схема 330 управления может изменить (например, снизить) уставку регулятора так, чтобы от батареи потреблялась меньшая общая мощность. Тогда электродвигатель 65 замедлит вращение. При этом потребление из модуля питания сократится, если вообще когда-нибудь превысит максимальную располагаемую мощность, что позволяет избежать ситуации недостатка мощности во время процедуры.
Кроме того, в соответствии с другими вариантами осуществления, мощность, отбираемую из батареи, можно оптимизировать таким способом, чтобы химические реакции в батарейных элементах располагали бы временем на восстановление, чтобы тем самым оптимизировать ток и мощность, которые можно получить от батареи. При импульсных нагрузках батареи обычно обеспечивают большую мощность в начале импульса, чем к концу импульса. Данная особенность обусловлена несколькими факторами, включающими в себя следующие: (1) PTC может изменять сопротивление в течение импульса; (2) температура батареи может изменяться; и (3) скорость электрохимической реакции изменяется из-за того, что истощается электролит на катоде, и скорость диффузии свежего электрода ограничивает скорость реакции. В соответствии с различными вариантами осуществления, схема 330 управления может контролировать преобразователь 320, чтобы он отбирал меньший ток от батареи, чтобы обеспечить восстановление батареи до того, как батарея снова отдает импульс.
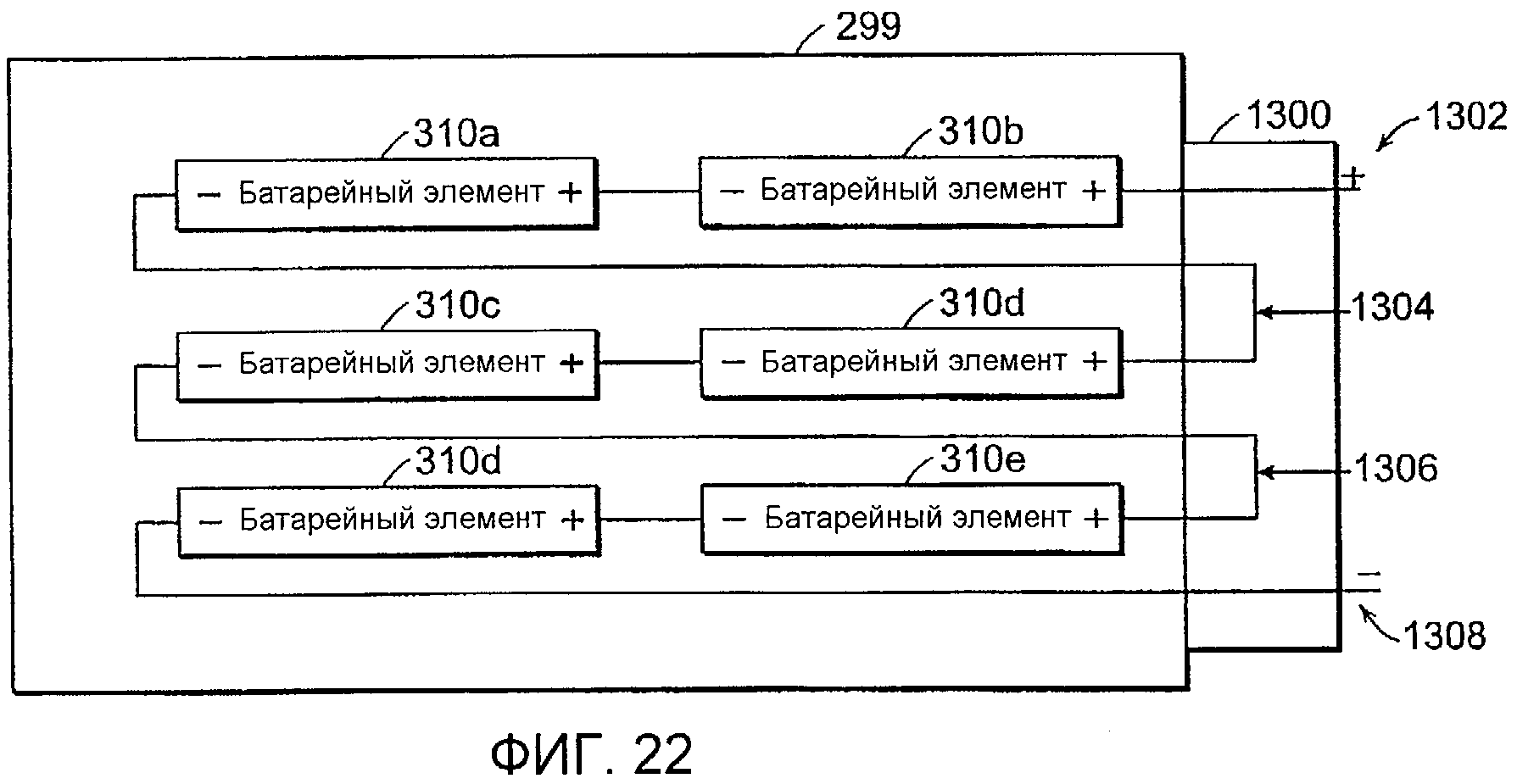
Как упоминалось выше, в соответствии с различными вариантами осуществления, модуль 299 питания может содержать несколько батарейных элементов 310. На фиг.22 показан вариант осуществления с шестью (6) батарейными элементами 310. Батарейные элементы 310 могут быть, например, литиевыми первичными батареями. В соответствии с различными вариантами осуществления, комплект 299 батарей может содержать только часть соединенных внутри батарейных элементов. Например, как показано на фиг.22, элемент 310a соединен с элементом 310b, элемент 310c соединен с элементом 310d, и элемент 310e соединен с элементом 310f. Однако элемент 310b не имеет внутреннего соединения в комплекте батарей с элементом 310c, и элемент 310d не имеет внутреннего соединения в комплекте батарей с элементом 310e. Рукоятка 6 инструмента 10 в данных вариантах осуществления может содержать соединитель 1300 батарейных элементов, который соединяет элементы 310 последовательно только в том случае, когда комплект 299 батарей физически вставлен в инструмент 10. Например, соединитель 1300 может содержать положительный вывод 1302, соединитель 1304, который последовательно соединяет элемент 310b с элементом 310c, соединитель 1306, который соединяет элемент 310d с элементом 310e, и отрицательный вывод 1308.
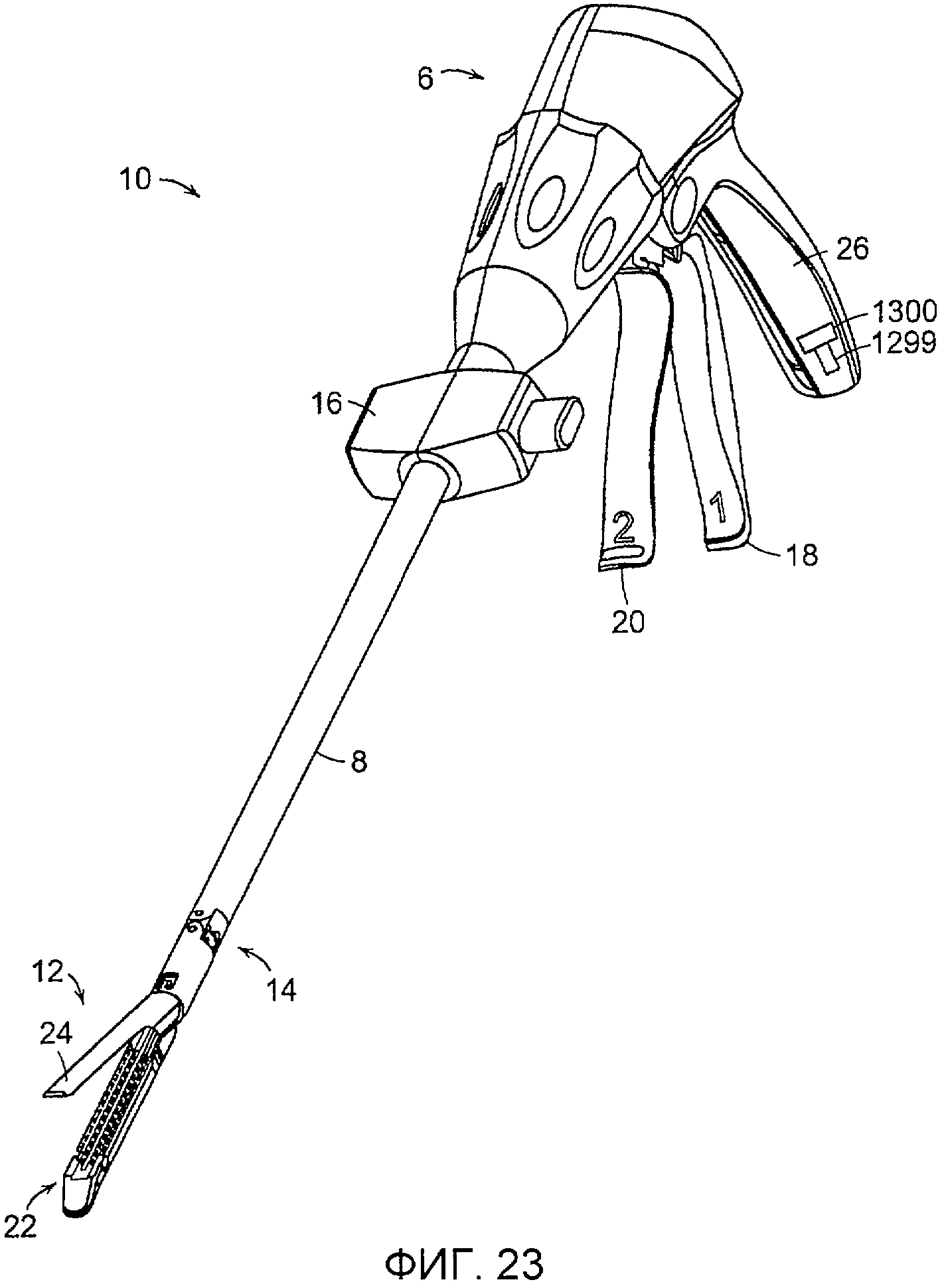
На фиг.23 представлен вариант осуществления инструмента 10, в котором сменный, съемный комплект 299 батарей установлен в рукоятку 6 инструмента 10. Как показано на фиг.23, соединитель 1300 батарейных элементов может быть встроен в рукоятку 6 таким образом, что, когда комплект 299 батарей вставляют в рукоятку 6, соединитель 1300 батарейных элементов осуществляет необходимые соединения батарейных элементов.
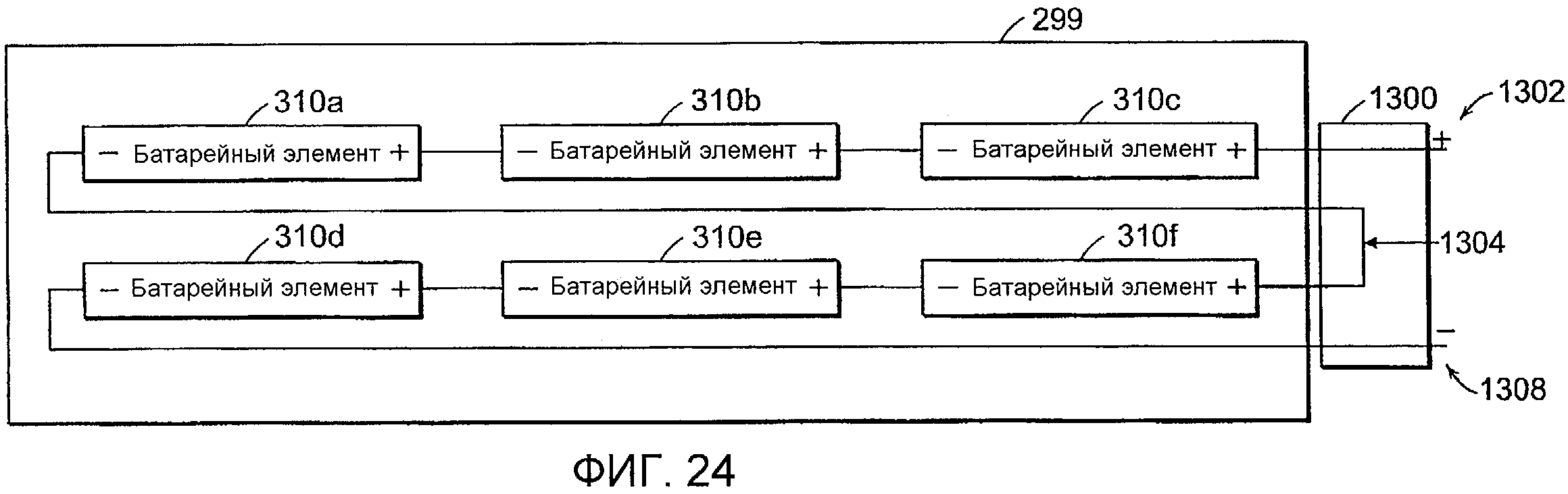
Разумеется, в других вариантах осуществления, можно использовать комплекты батарей с разных числом внутренних элементов и разным числом внутренне соединенных элементов. Например, на фиг.24 представлен вариант осуществления с шестью элементами 310a-f, в котором два набора из трех элементов (элементов 310a-c и элементов 310d-f) соединены между собой.
Устройства, описанные в настоящей заявке, могут быть выполнены для отправки в отходы после однократного применения, или упомянутые устройства могут быть выполнены для многократного использования. Однако в обоих случаях устройство можно восстанавливать для повторного применения после, по меньшей мере, одного использования. Восстановление может включать в себя любую комбинацию этапов разборки устройства, последующие чистку или замену конкретных деталей и затем повторную сборку. В частности, устройство можно разбирать, и любое число конкретных деталей или частей устройства можно селективно заменять или снимать в любой комбинации. После чистки и/или замены конкретных частей устройство можно повторно собрать для последующего использования либо в ремонтном учреждении, либо персоналом операционного блока непосредственно перед хирургической процедурой. Специалистам в данной области техники будет очевидно, что восстановление устройства можно выполнять с применением множества различных методов для разборки, очистки/замены и повторной сборки. Как применение данных методов, так и получаемое восстановленное устройство находятся в пределах объема настоящего изобретения.
Различные варианты осуществления изобретения, описанные в настоящей заявке, будут, предпочтительно, подвергаться обработке перед хирургической операцией. Сначала новый или пользованный инструмент получают и, при необходимости, подвергают очистке. Затем инструмент можно стерилизовать. Согласно одному методу стерилизации, инструмент помещают в закрытую и герметизируемую тару, например термоформованную пластиковую оболочку с покрытием из листа материала TYVEK®. Затем тару и инструмент помещают в поле действия излучения, которое может проникать сквозь тару, например гамма-излучения, рентгеновского излучения или потока высокоэнергетических электронов. Излучение убивает бактерии на инструменте и в таре. Затем стерилизованный инструмент можно хранить в стерильной таре. Герметизированная тара сохраняет инструмент в стерильном состоянии для вскрытия в медицинском учреждении.
Устройство рекомендуется стерилизовать. Стерилизацию можно выполнять множеством способов, известных специалистам в данной области техники, включая способы с бета- или гамма-излучением, этиленоксидом, паром и другие способы.
Хотя выше настоящее изобретение пояснялось посредством описания нескольких вариантов осуществления и хотя наглядные варианты осуществления описаны выше со всеми подробностями, заявитель не предполагает сужать или как-либо ограничивать объем притязаний прилагаемой формулы изобретения упомянутыми подробностями. Дополнительные преимущества и модификации могут быть легко обнаружены специалистами в данной области техники. Различные варианты осуществления настоящего изобретения отражают многочисленные усовершенствования по сравнению с ранее известными способами сшивания скобками, которые требуют использования скобок с разными размерами в одной кассете для получения скобок, которые имеют разные формованные (окончательные) высоты.
Соответственно, настоящее изобретение описано на примере эндоскопических процедур и устройств. Однако применение в настоящей заявке таких терминов, как «эндоскопический», не следует интерпретировать в смысле ограничения настоящего изобретения хирургическим разрезным и сшивающим скобками инструментом для применения только в сочетании с эндоскопической трубкой (т.е. троакаром). Напротив, предполагается, что настоящее изобретение может найти применение при любой процедуре, при которой доступ ограничен, включая, но без ограничения, лапароскопические процедуры, а также при открытых процедурах. Кроме того, оригинальные и новые аспекты различных вариантов осуществления кассеты для скобок в соответствии с настоящим изобретением могут оказаться полезными при применении в сочетании с другими формами сшивающих скобками устройств, не выходящими за пределы сущности и объема настоящего изобретения.
Реферат
Изобретение относится к медицине и может быть использовано как моторизованный хирургический режущий и скрепляющий инструмент. Инструмент содержит устройство накопления заряда, отдельное от батареи. Устройство накопления заряда обеспечивает дополнительную мощность для электродвигателя при определенных условиях. Электродвигатель может содержать несколько обмоток. 3 н. и 14 з.п. ф-лы, 24 ил.
Формула
концевой эффектор, содержащий подвижный режущий инструмент;
вал, соединенный его дистальным концом с концевым эффектором; и
рукоятку, соединенную с проксимальным концом вала, при этом рукоятка содержит:
электродвигатель для приведения в действие режущего инструмента;
схему управления электродвигателем для управления электродвигателем, причем схема управления электродвигателем содержит:
источник питания, подключенный к электродвигателю для электрического питания электродвигателя;
устройство накопления заряда; и
схему переключения, подсоединенную к источнику питания и устройству накопления заряда, для (i) кратковременного подключения устройства накопления заряда к источнику питания для зарядки устройства накопления заряда и (ii) селективного включения устройства накопления заряда последовательно с источником питания для обеспечения дополнительной мощности в электродвигатель.
первый рабочий режим с низкой мощностью для первого участка цикла разрезного хода режущего инструмента; и
второй рабочий режим с высокой мощностью для второго участка цикла разрезного хода режущего инструмента.
электродвигатель содержит, по меньшей мере, две обмотки; и
схема управления электродвигателем предназначена для селективного включения, по меньшей мере, двух обмоток последовательно или параллельно.
концевой эффектор, содержащий подвижный режущий инструмент;
вал, соединенный его дистальным концом с концевым эффектором; и
рукоятку, соединенную с проксимальным концом вала, при этом рукоятка содержит:
электродвигатель для приведения в действие режущего инструмента, причем электродвигатель содержит, по меньшей мере, две обмотки;
схему управления электродвигателем, подключенную к электродвигателю, которая выполнена с возможностью селективно включать, по меньшей мере, две обмотки электродвигателя последовательно или параллельно.
концевой эффектор, содержащий подвижный режущий инструмент;
вал, соединенный его дистальным концом с концевым эффектором; и
рукоятку, соединенную с проксимальным концом вала, при этом рукоятка содержит:
электродвигатель для приведения в действие режущего инструмента;
съемный комплект батарей для питания электродвигателя, причем комплект батарей содержит множество батарейных элементов, причем множество батарейных элементов содержит первое множество последовательно соединенных батарейных элементов и второе множество последовательно соединенных батарейных элементов; и
соединитель батарейных элементов, отдельный от комплекта батарей, выполненный с возможностью последовательно соединять первое множество последовательно соединенных батарейных элементов со вторым множеством последовательно соединенных батарейных элементов, когда комплект батарей установлен в инструменте, причем первое множество последовательно соединенных батарейных элементов не соединено со вторым множеством последовательно соединенных батарейных элементов соединителем батарейных элементов в комплекте батарей до тех пор, пока они последовательно не соединяются соединителем батарейных элементов при установке комплекта батарей в хирургический инструмент.
устройство накопления заряда; и
схему переключения, подсоединенную к комплекту батарей и устройству накопления заряда, для (i) кратковременного подключения устройства накопления заряда к комплекту батарей для зарядки устройства накопления заряда и (ii) селективного подключения устройства накопления заряда последовательно с комплектом батарей для обеспечения дополнительной мощности в электродвигатель.
Комментарии