Способ калибровки позиционера, система управления процессом и компьютерное устройство для регулирования давления для калибровки устройств управления процессом - RU2717634C2
Код документа: RU2717634C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу калибровки и испытаний позиционеров и, более конкретно, к способу и устройству для определения смещения позиционеров и проведения испытаний, таких как испытания при неполном ходе, с применением методов регулирования давления.
УРОВЕНЬ ТЕХНИКИ
[0002] В некоторых отраслях, таких как нефтяная промышленность, регулирующие органы все чаще требуют проведения испытаний при неполном ходе (PST) клапанов аварийного отключения (ESV). Однако ESV и/или другие узлы клапанов, входящие в «Приборную систему безопасности» (SIS), обычно предназначены для работы в режиме вкл/выкл. Соединения между штоками клапанов и приводными механизмами не являются жесткими, что приводит к значительному мертвому ходу. Кроме того, ESV обычно характеризуются высоким трением уплотнения и значительной динамикой прерывистого движения. Все эти факторы способствуют ухудшению дроссельного регулирования и усложнению испытаний при неполном ходе.
[0003] Кроме того, ESV и/или другие компоненты SIS обычно являются устройствами с высоким коэффициентом усиления. Например, приводные механизмы SIS часто представляют собой поршни простого действия с пружинным возвратом. Очень небольшое изменение давления внутри камеры приводного механизма может привести к значительному перемещению поршня. В результате при подключении механизмов привода SIS или других компонентов SIS к устройствам управления процессом (например, для проведения испытания при неполном ходе или других испытаний) смещения устройств управления процессом, такие как отклонения значений I/P (ток/давление), могут оказывать существенное влияние на калибровку компонентов SIS. Если калибровка компонентов SIS отклонена на значительную величину, результаты испытаний компонентов SIS, таких как испытания при неполном ходе, будут лишены практической ценности как испытания при неполном ходе, будут лишены практической ценности.
Краткое описание Сущности изобретения
[0004] В одном варианте реализации изобретения способ калибровки позиционера включает определение значения давления, соответствующего определенному состоянию приводного механизма, управляемого позиционером и регулирующего, посредством позиционера, давление в приводном механизме в соответствии с уставкой давления, основанной на значении давления, при котором обеспечивается поддержание определенного состояния приводного механизма. Способ дополнительно включает получение измеренного значения, указывающего фактическое давление в приводном механизме, и определение смещения позиционера на основе измеренного значения и уставки давления.
[0005] В другом варианте реализации изобретения система управления процессом содержит приводной механизм и соединенный с ним позиционер. Позиционер выполнен с возможностью управления приводным механизмом с учетом смещения позиционера. Позиционер определяет смещение посредством регулирования давления в приводном механизме в соответствии с уставкой давления, при этом определенное состояние приводного механизма поддерживается при регулировании давления в приводном механизме, получения контроллером измеренного значения, указывающего фактическое давление в приводном устройстве, и определения контроллером смещения позиционера на основе измеренного значения и уставки давления.
[0006] В еще одном варианте реализации изобретения компьютерное устройство содержит один или большее количество процессоров и одно или большее количество энергонезависимых запоминающих устройств. Энергонезависимые запоминающие устройства содержат исполняемые компьютером команды, которые при выполнении одним или большим количеством процессоров побуждают компьютерное устройство определить значение давления, соответствующее конкретному состоянию приводного механизма, и регулировать давление в приводном механизме в соответствии с уставкой давления, основанной на значении давления, при котором обеспечивается поддержание определенного состояния приводного механизма. Исполняемые компьютером команды дополнительно приводят к тому, что компьютерное устройство получает измеренное значение, указывающее фактическое давление в приводном механизме, и определяет смещение позиционера на основе измеренного значения и уставки давления.
краткое описание графических материалов
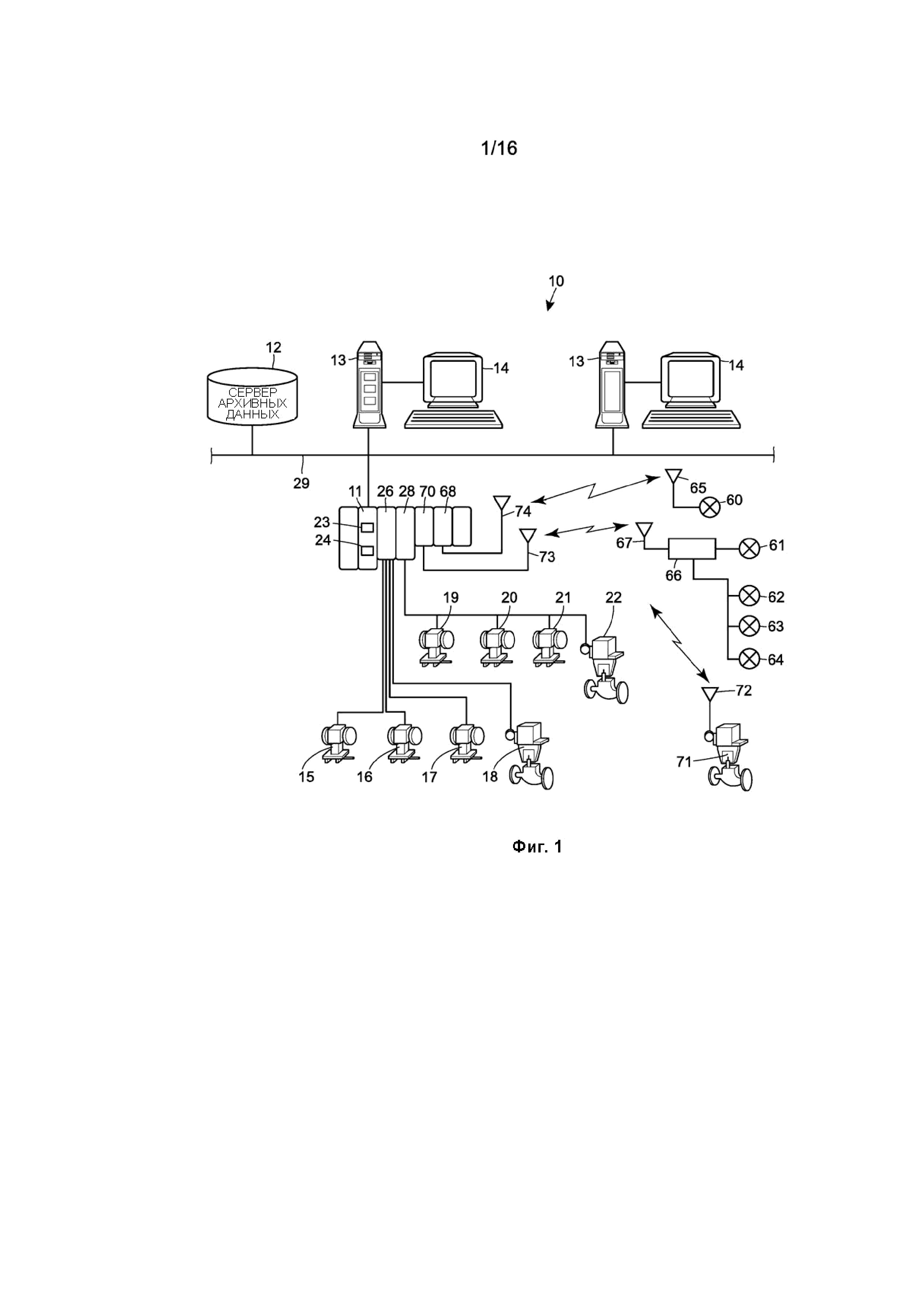
[0007] На Фиг. 1 проиллюстрирован пример системы управления процессом, содержащей позиционеры и/или узлы приводных механизмов/клапанов, которые могут проходить калибровку и/или испытания с использованием методов управления процессом;
[0008] На Фиг. 2А, 2В и 2С проиллюстрирован пример динамики прерывистого движения клапана аварийного отключения, который может быть реализован в примере системы управления процессом, проиллюстрированной на Фиг. 1;
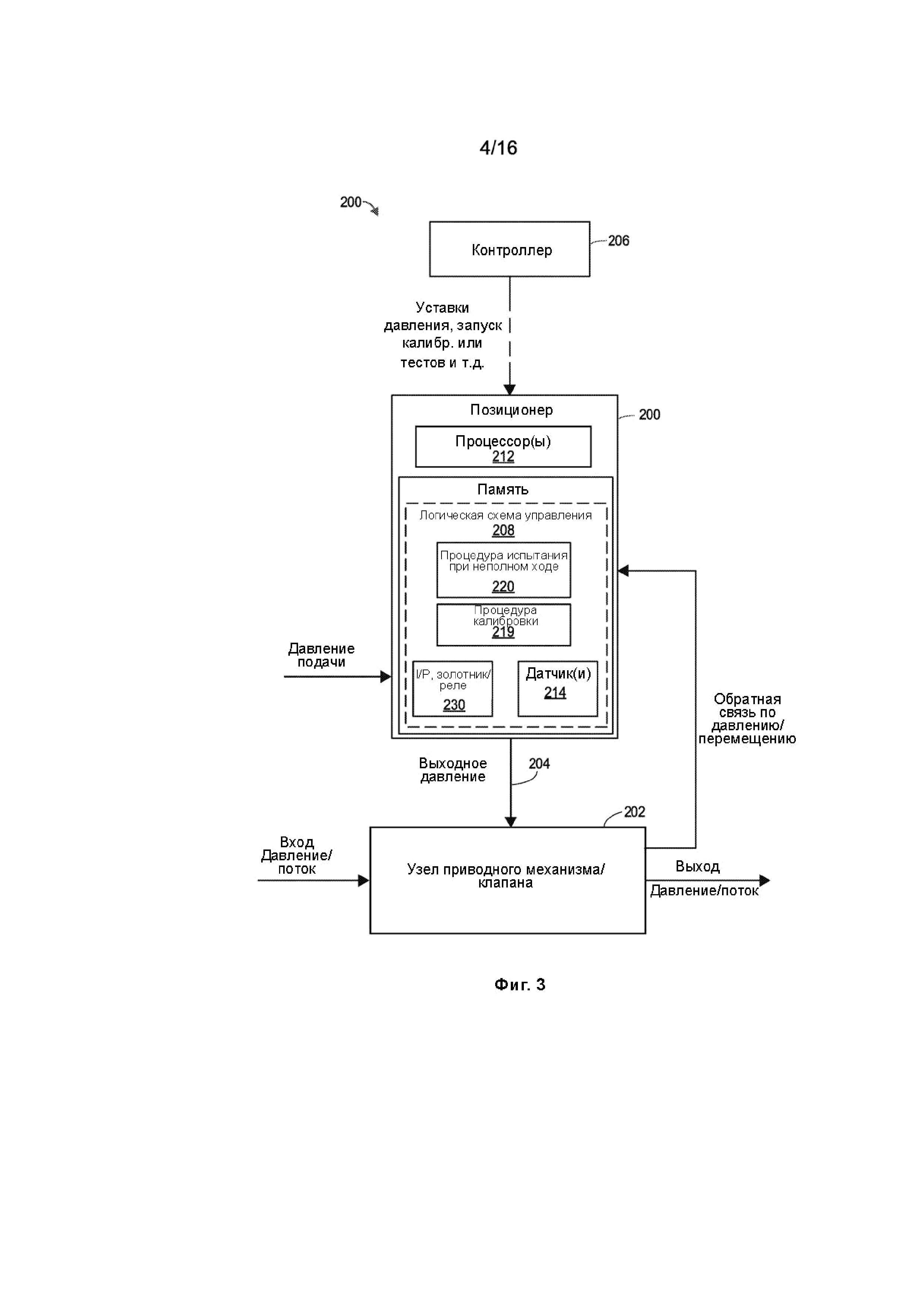
[0009] На Фиг. 3 проиллюстрирован пример позиционера, выполненного с возможностью калибровки и/или испытаний узла приводного механизма/клапана;
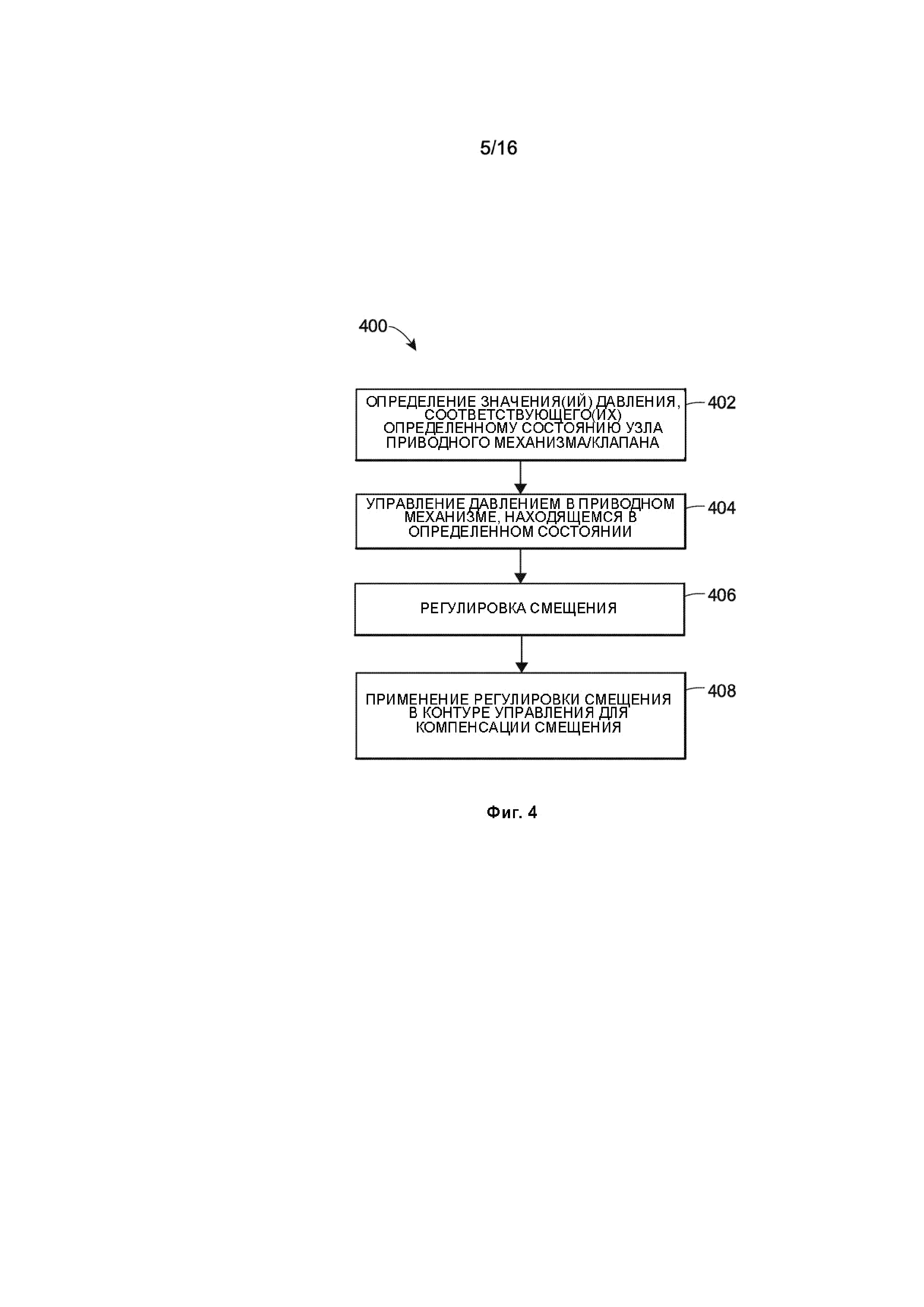
[0010] На Фиг. 4 проиллюстрирована блок-схема примера способа 400 определения смещения позиционера, такого как позиционер, проиллюстрированный на Фиг. 3;
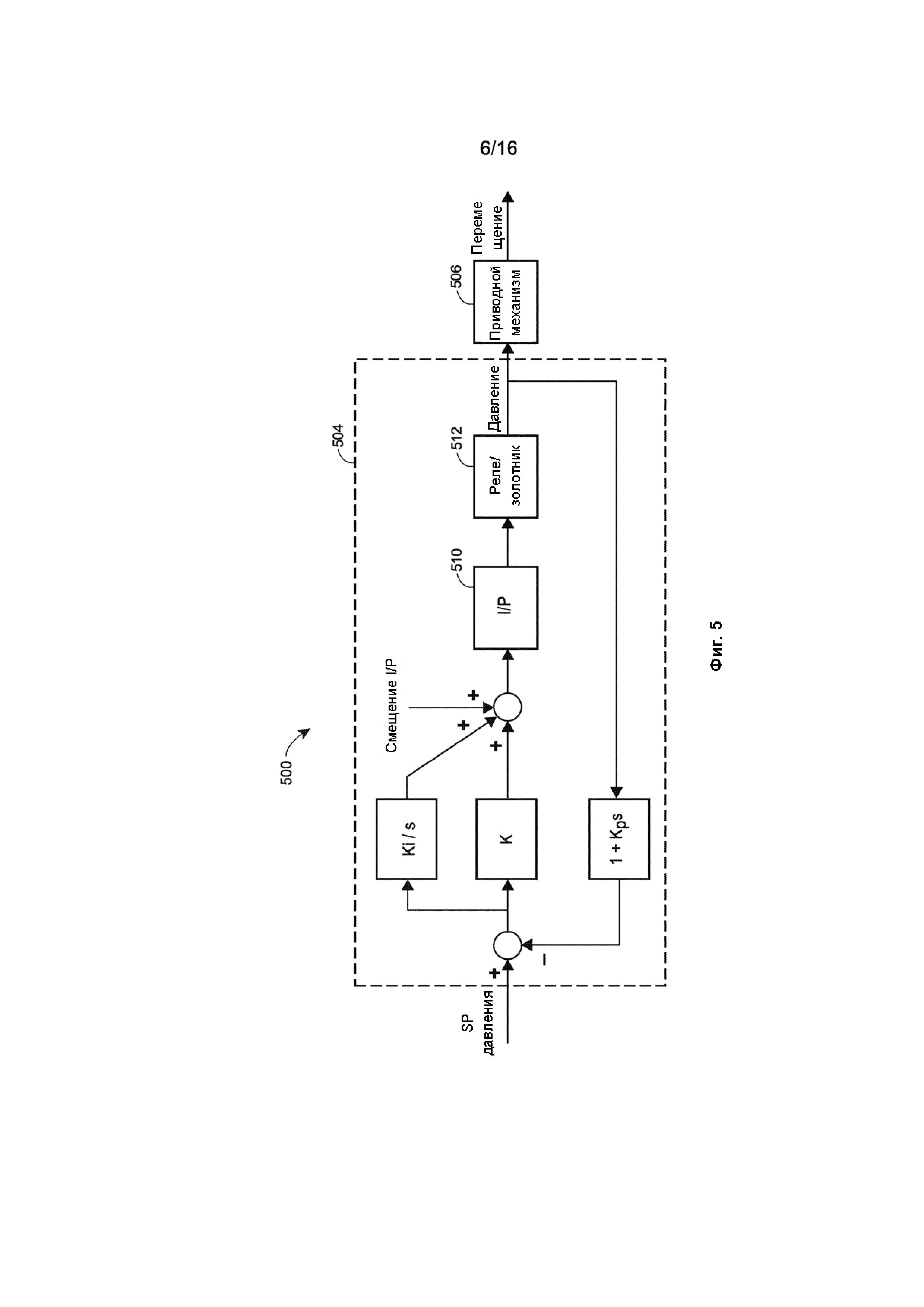
[0011] На Фиг. 5 проиллюстрирована блок-схема примера контура регулирования давления, который может быть, по меньшей мере частично, реализован позиционером, проиллюстрированным на Фиг. 3;
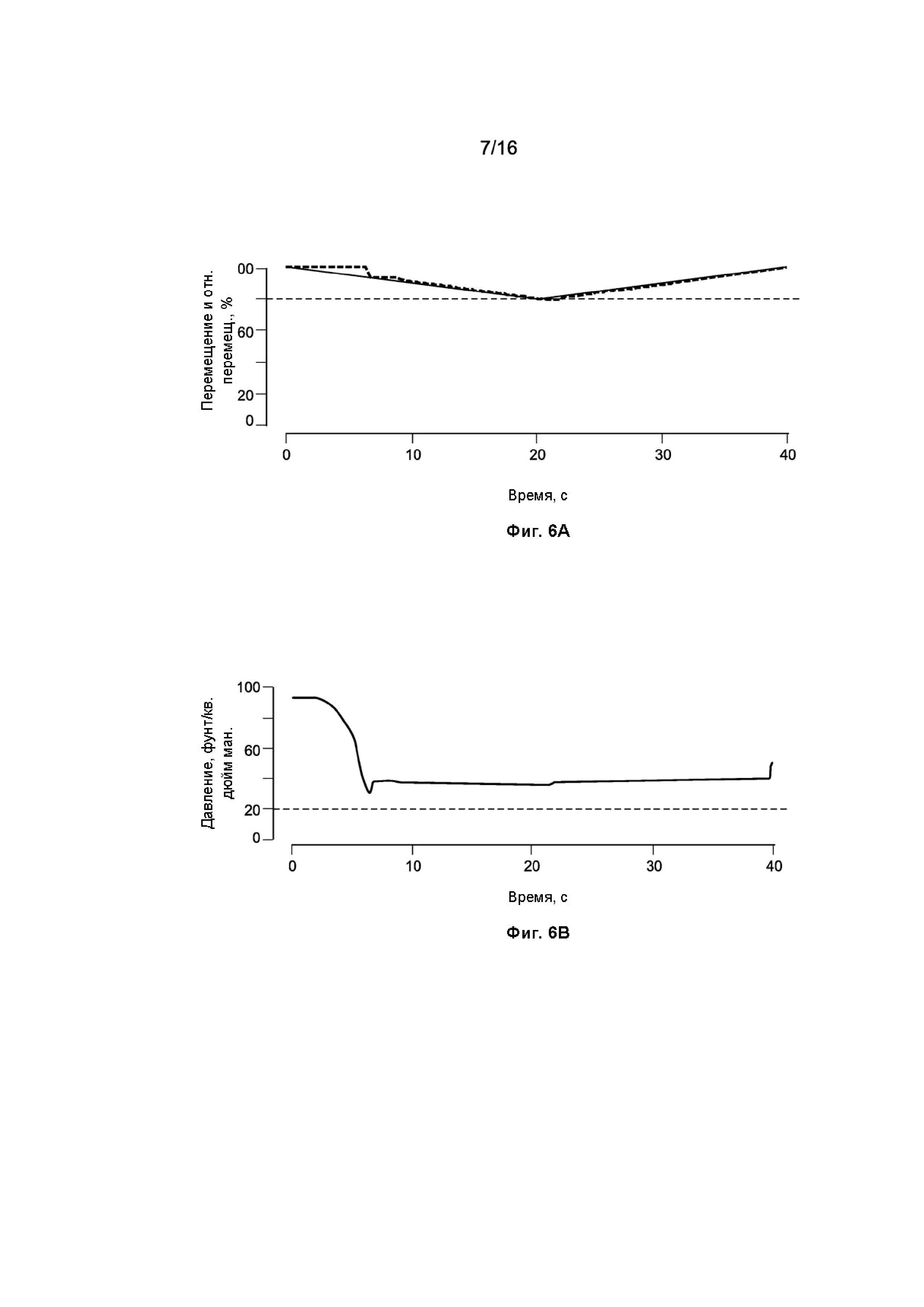
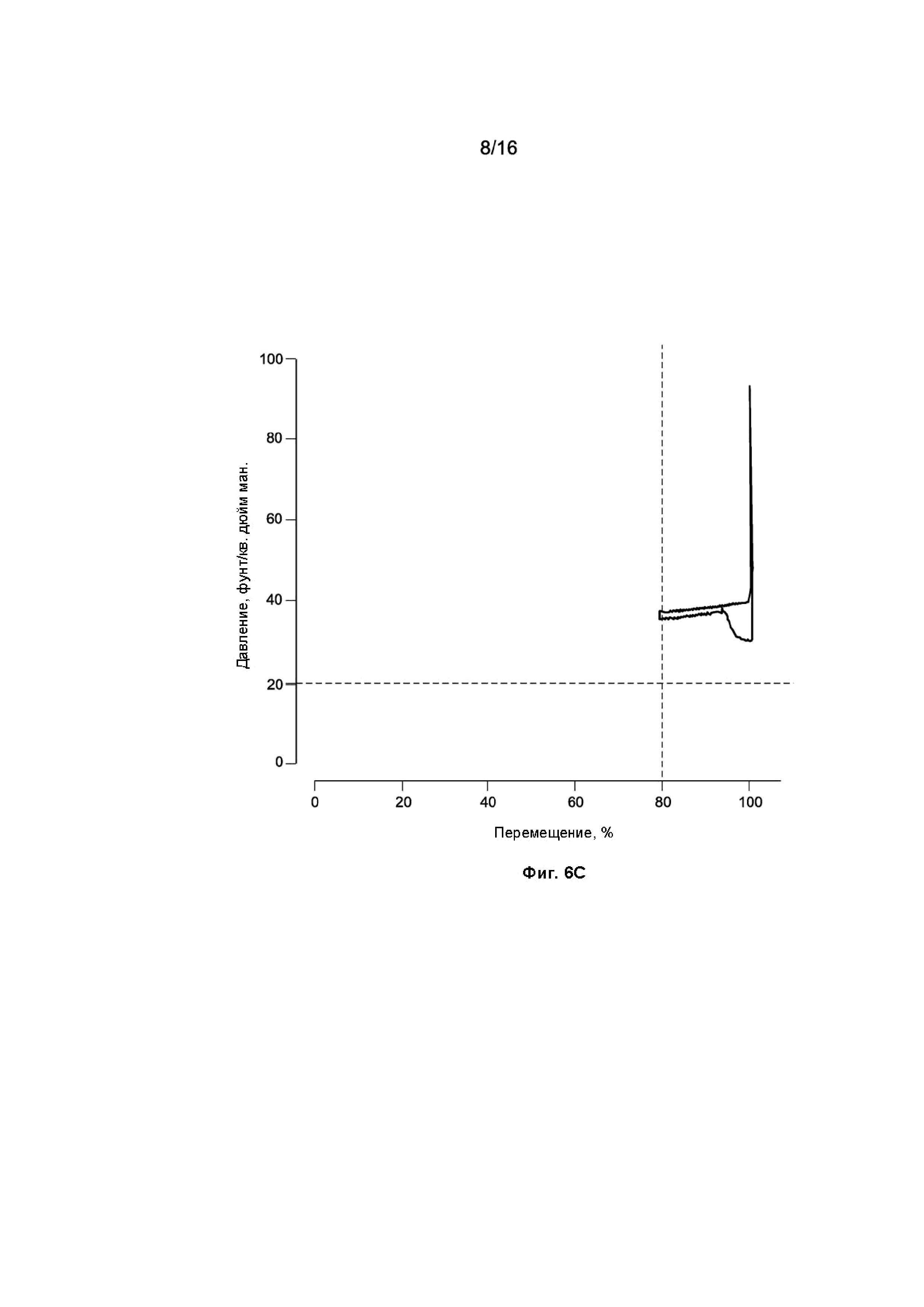
[0012] На Фиг. 6А, 6В и 6С проиллюстрированы графики, связанные с испытанием при неполном ходе с использованием управления перемещением;
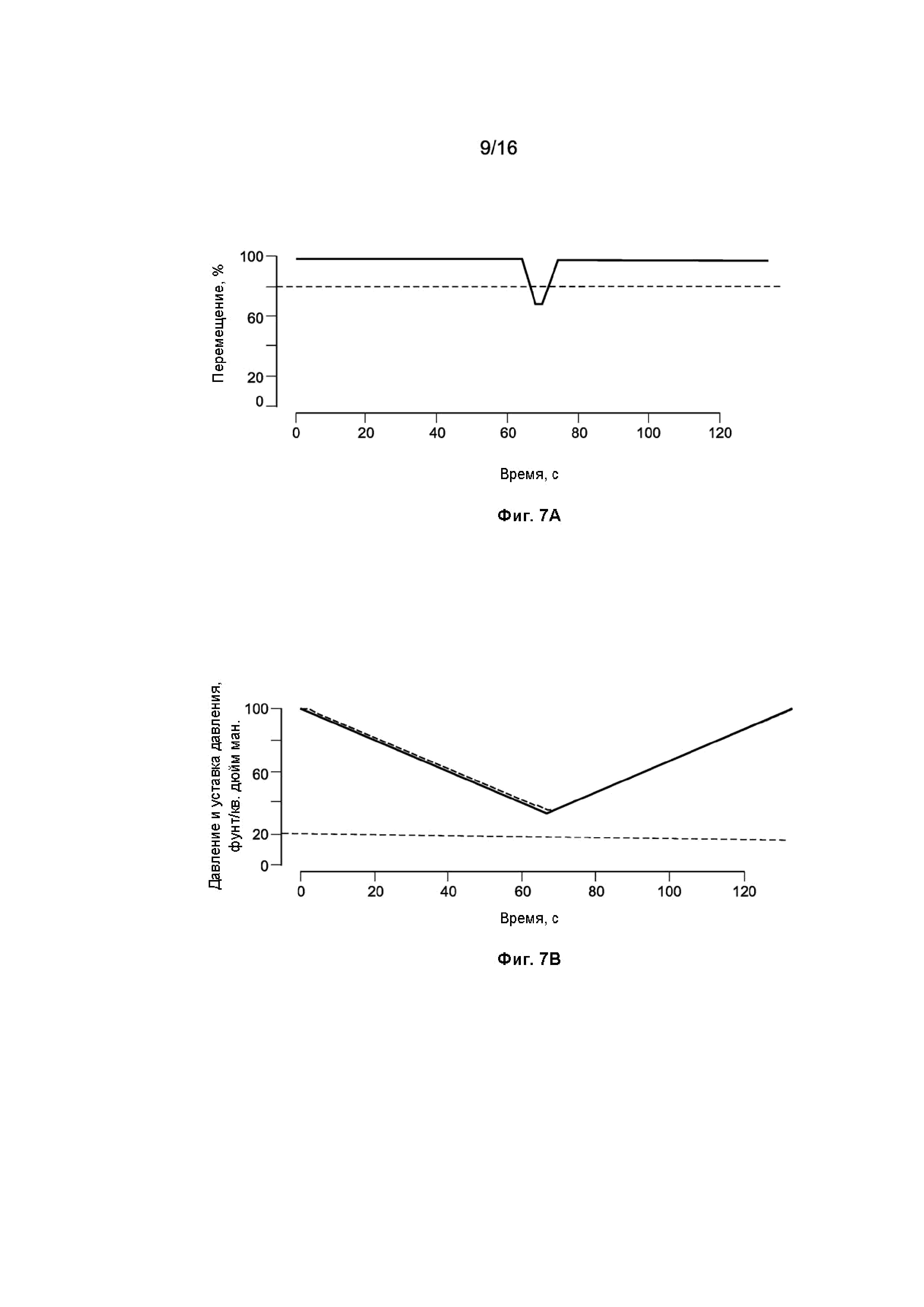
[0013] На Фиг. 7А, 7В и 7С проиллюстрированы графики, связанные с примером испытания при неполном ходе с использованием метода управления давлением, который может выполняться позиционером, проиллюстрированном на Фиг. 3;
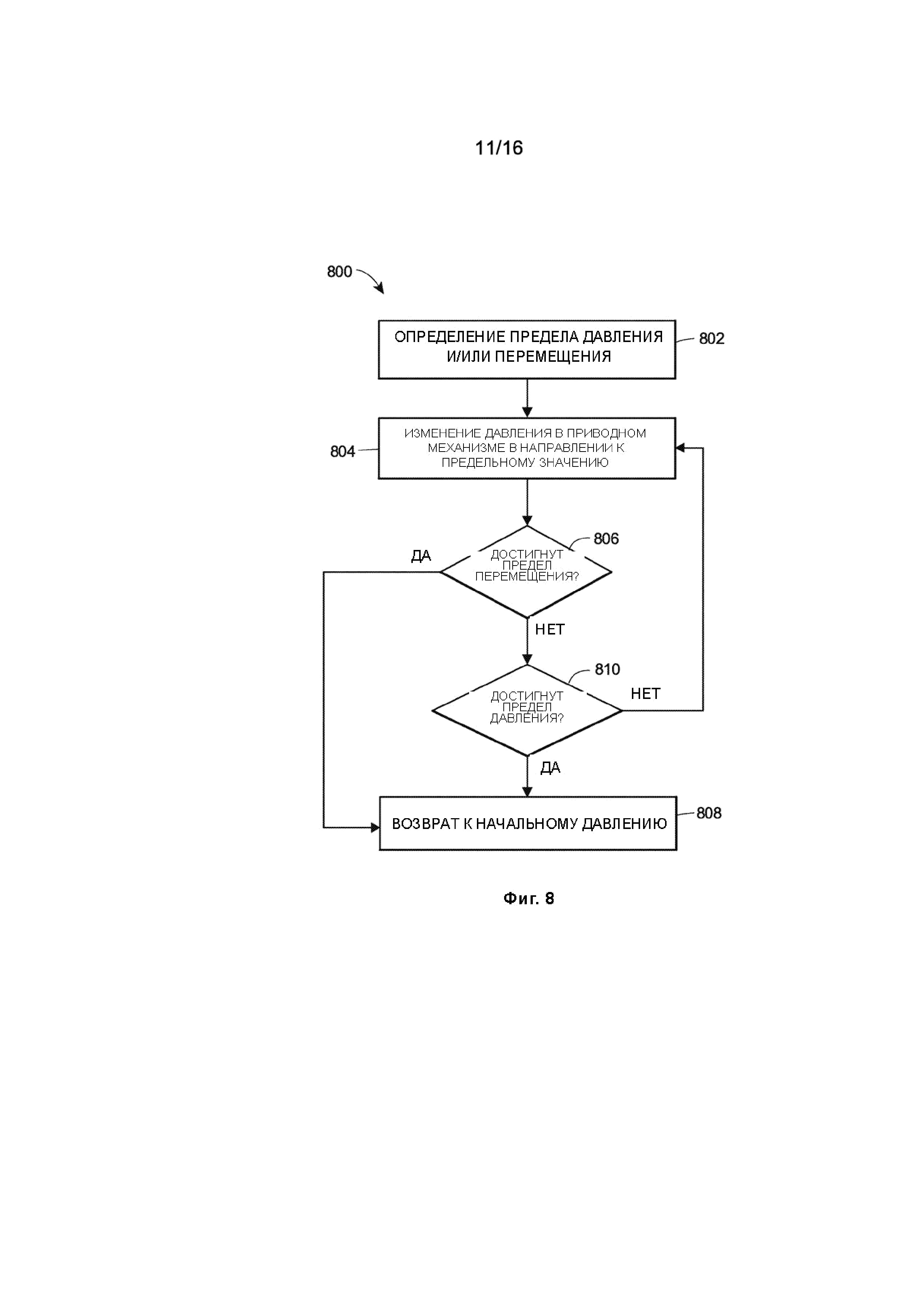
[0014] На Фиг. 8 проиллюстрирована блок-схема примера способа испытания узла приводного механизма/клапана с применением методов регулирования давления, которое может выполняться позиционером, проиллюстрированном на Фиг. 3;
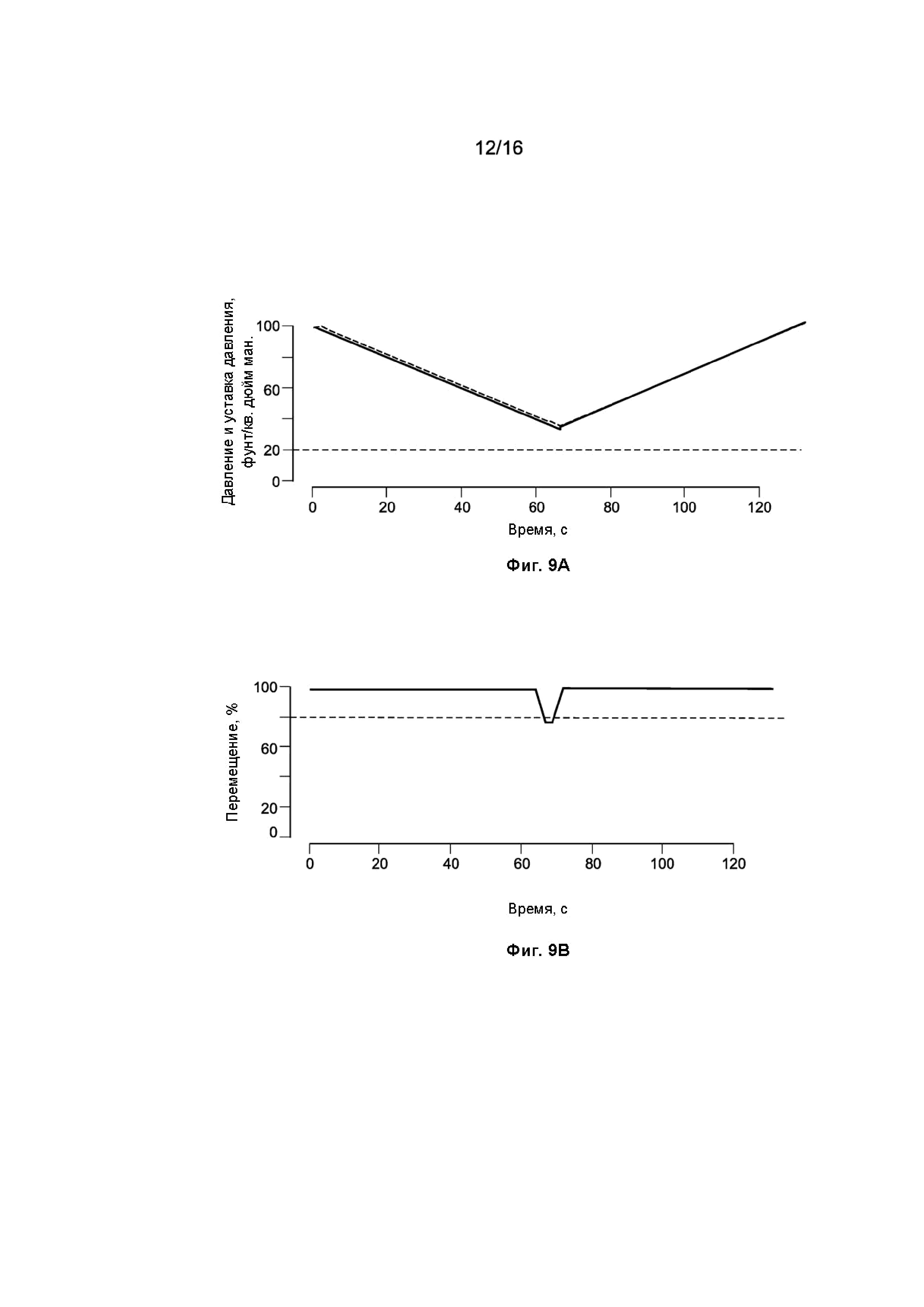
[0015] На Фиг. 9А, 9В и 9С проиллюстрированы графики, связанные с другим примером испытания при неполном ходе с использованием ступенчатого изменения давления, который может выполняться позиционером, проиллюстрированном на Фиг. 3;
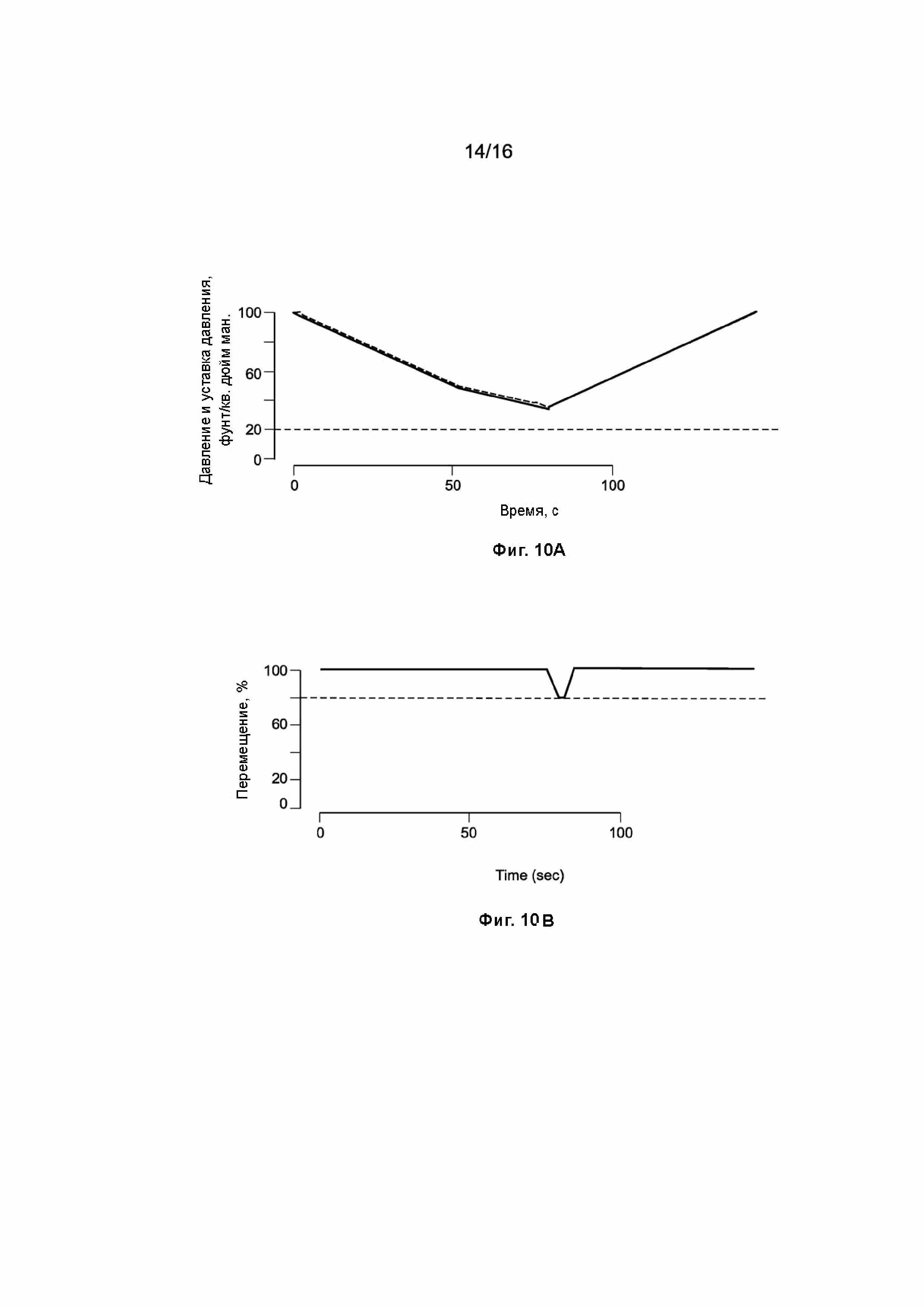
[0016] На Фиг. 10А, 10В и 10С проиллюстрированы графики, связанные с другим примером испытания при неполном ходе с использованием переменных скоростей линейного изменения давления, который может выполняться позиционером, проиллюстрированном на Фиг. 3; и
[0017] На Фиг. 11 проиллюстрирована блок-схема контура управления, содержащего часть управления внутренним давлением и часть управления внешним перемещением, который может быть, по меньшей мере частично, реализован позиционером, проиллюстрированным на Фиг. 3.
ПОДРОБНОЕ ОПИСАНИЕ сущности ИЗОБРЕТЕНИЯ
[0018] Настоящее изобретение относится к калибровке позиционеров или сервоконтроллеров, таких как позиционеры клапанов, с применением методов регулирования давления и использованием позиционеров или сервоконтроллеров для проведения испытаний с применением методов регулирования давления. В частности, настоящее изобретение относится к способу и устройству для: (i) определения смещения позиционера путем регулирования давления в приводном механизме или действующего на приводной механизм при постоянном объеме в ходе регулирования давления в конечной точке, при среднем значении давления в диапазоне регулирования давления, или в другое подходящее время или при ином подходящем состоянии приводного механизма, и (ii) проведения испытаний (например, испытаний при неполном ходе) путем регулирования давления в приводном механизме или действующего на приводной механизм вместо управления перемещением или положением приводного механизма. Для удобства обсуждения в этом описании будут рассматриваться определенные типы позиционеров, такие как позиционеры клапанов, соединенные с клапанами аварийного отключения. Однако в целом, способ и устройство согласно настоящему изобретению могут калибровать любые подходящие компоненты узлов регулирующих клапанов и использовать эти компоненты для проведения испытаний с использованием методов регулирования давления.
[0019] Благодаря использованию регулирования давления (т.е., в отличие от управления перемещением) для калибровки позиционеров и проведения испытаний, способы согласно настоящему изобретению могут частично устранить определенные сложности, возникающие из-за ослабленных соединений, значительного мертвого хода, сильного трения уплотнения и значительной динамики прерывистого движения, присущих многим клапанам аварийного отключения (ESV). В частности, позиционер клапана, управляющий ESV, может генерировать оценку смещения тока и давления (I/P) для позиционера клапана, так что указанная оценка смещения I/P не имеет несоответствий, связанных с мертвым ходом и трением клапана. Позиционер может также выполнять испытание при неполном ходе ESV, регулируя давление в приводном механизме ESV даже в том случае, если ESV заклинивает.
[0020] В целом, способы настоящего изобретения могут облегчать калибровку и испытания любых подходящих позиционеров, отличных от позиционеров, соединенных с ESV, таких как позиционеры, соединенные с противопомпажными клапанами компрессора, вентиляционными клапанами и т.д. и управляющие ими. Например, контроллер может обеспечивать выполнение позиционером, соединенным с противопомпажным клапаном компрессора, калибровок и испытаний с использованием методов регулирования давления, как описано здесь, при этом противопомпажный клапан компрессора выполнен с возможностью предотвращения скачков, возникающих, когда давление на выходе компрессора слишком велико по отношению к потоку через компрессор. Приведенный в качестве примера контроллер также может побуждать позиционер, соединенный с узлом дроссельного клапана/приводного механизма, выполнить калибровки и испытания с использованием методов регулирования давления. Благодаря использованию регулирования давления (т.е., в отличие от управления перемещением) в этих ситуациях контроллер может, например, калибровать позиционеры в процессе их эксплуатации, не нарушая соответствующий процесс.
Обзор системы управления процессом
[0021] На Фиг. 1 проиллюстрирована система управления процессом 10, сконструированная в соответствии с одним вариантом настоящего изобретения. Она содержит одно или большее количество полевых устройств 15, 16, 17, 18, 19, 20, 21, 22 и 71, поддерживающих связь с контроллером процесса 11. Контроллер процесса 11 может понуждать одно или большее количество полевых устройств 15, 16, 17, 18, 19, 20, 21, 22 и 71 к выполнению калибровок и/или испытаний с использованием методов регулирования давления, как описано ниже. Контроллер процесса 11 также связан с сервером архивных данных 12 и одной или большим количеством пользовательских рабочих станций 13, каждая из которых имеет дисплей 14. В такой конфигурации контроллер 11 подает сигналы полевым устройствам 15, 16, 17, 18, 19, 20, 21, 22 и 71 и рабочим станциям 13 и принимает сигналы от них для управления системой управления процессом.
[0022] Более подробно, контроллер процесса 11 системы управления процессом 10 в варианте, проиллюстрированном на Фиг. 1, соединен проводными сигнальными соединениями с полевыми устройствами 15, 16, 17, 18, 19, 20, 21 и 22 через платы ввода/вывода (I/O) 26 и 28. Сервер архивных данных 12 может быть любым подходящим типом блока сбора данных, имеющим любой подходящий тип памяти и любое подходящее или известное программное обеспечение, аппаратное обеспечение или прошивку для хранения данных. Более того, хотя сервер архивных данных 12 проиллюстрирован на Фиг. 1 как отдельное устройство, он может в альтернативном варианте или дополнительно быть частью одной из рабочих станций 13 или другого компьютерного устройства, такого как сервер. Контроллер 11, который может быть, например, контроллером DeltaV™, предлагаемым компанией Emerson Process Management, подключенным с возможностью передачи данных к рабочим станциям 13 и серверу архивных данных 12 через сеть связи 29, которая может быть, например, Ethernet подключением.
[0023] Как указано в данном описании, контроллер 11 изображен соединенным с возможностью передачи данных с полевыми устройствами 15, 16, 17, 18, 19, 20, 21 и 22 с использованием схемы проводной связи, которая может предусматривать использование любого требуемого оборудования, программного обеспечения и/или прошивки для реализации проводной связи. Проводная связь может включать, например, стандартную связь 4-20 мА и/или любую связь с использованием любого интеллектуального коммуникационного протокола, такого как протокол связи FOUNDATION® Fieldbus, протокол связи HART® и т.д. Полевые устройства 15, 16, 17, 18, 19, 20, 21 и 22 могут быть любыми типами устройств, такими как позиционеры, сервоконтроллеры, датчики, регуляторы давления, узлы регулирующих клапанов и т.д., в то время как платы ввода/вывода 26 и 28 могут быть любыми типами устройств ввода/вывода, соответствующих любому требуемому протоколу связи или контроллера. В варианте реализации изобретения, проиллюстрированном на Фиг. 1, полевые устройства 15, 16, 17 и 18 являются стандартными устройствами 4-20 мА, которые осуществляют связь по аналоговым линиям с платой ввода/вывода 26, в то время как цифровые полевые устройства 19, 20, 21 и 22 могут быть интеллектуальными устройствами, такими как коммуникационные устройства HART® и полевые устройства Fieldbus, которые осуществляют связь по цифровой шине с платой ввода/вывода 28 с использованием протокола связи Fieldbus. Разумеется, полевые устройства 15, 16, 17, 18, 19, 20, 21 и 22 могут соответствовать любым другим требуемым стандартам или протоколам, включая любые стандарты или протоколы, которые будут разработаны в будущем.
[0024] Кроме того, система управления процессом 10, изображенная на Фиг. 1, содержит ряд беспроводных полевых устройств 60 и 71 и ряд других полевых устройств 61, 62, 63 и 64, связанных с возможностью передачи данных с беспроводным маршрутизатором или другим модулем 66. Полевые устройства 60, 61, 62, 63 и 64 изображены в виде передатчиков (например, датчиков регулируемых параметров процесса), а полевое устройство 71 изображено как узел регулирующего клапана, содержащий, например, регулирующий клапан и приводной механизм. Беспроводная связь может быть установлена между контроллером 11 и полевыми устройствами 60, 61, 62, 63, 64 и 71 с использованием любого требуемого оборудования для беспроводной связи, включая аппаратное обеспечение, программное обеспечение, прошивку или любую их комбинацию, которая известна сейчас или будет разработана в будущем. В варианте, проиллюстрированном на Фиг. 1, антенна 65 соединена с передатчиком 60 и предназначена для осуществления его беспроводной связи, в то время как беспроводной маршрутизатор или другой модуль 66, имеющий антенну 67, соединен с возможностью совместного обеспечения беспроводной связи для передатчиков 61, 62, 63 и 64. Аналогично, антенна 72 соединена с узлом регулирующего клапана 71 для осуществления беспроводной связи для узла регулирующего клапана 71. Полевые устройства или связанное с ними оборудование 60, 61, 62, 63, 64, 66 и 71 могут реализовывать операции стека протоколов, используемые соответствующим протоколом беспроводной связи, для приема, декодирования, маршрутизации, кодирования и отправки беспроводных сигналов с помощью антенн 65, 67 и 72, для осуществления беспроводной связи между контроллером процесса 11, передатчиками 60, 61, 62, 63, 64 и узлом регулирующего клапана 71.
[0025] Контроллер процесса 11 соединен с одним или большим количеством устройств ввода/вывода 73 и 74, каждое из которых соединено с соответствующей антенной 75 и 76, и эти устройства ввода/вывода и антенны 73, 74, 75 и 76 работают в качестве передатчиков/приемников для осуществления беспроводной связи с беспроводными полевыми устройствами 61, 62, 63, 64 и 71 через одну или большее количество сетей беспроводной связи. Беспроводная связь между полевыми устройствами (например, передатчиками 60, 61, 62, 63 и 64 и узлом регулирующего клапана 71) может осуществляться с использованием одного или большего количества известных протоколов беспроводной связи, таких как протокол WirelessHART®, Ember, WiFi, стандарт беспроводной связи IEEE и т.д. Кроме того, устройства ввода/вывода 73 и 74 могут реализовывать операции стека протоколов, используемые этими протоколами беспроводной связи, для приема, декодирования, маршрутизации, кодирования и отправки беспроводных сигналов с помощью антенн 75 и 76 для осуществления беспроводной связи между контроллером 11, передатчиками 60, 61, 62, 63, 64 и узлом регулирующего клапана 71.
[0026] Как показано на Фиг. 1, контроллер 11 обычно содержит процессор 77, который реализует или контролирует одну или большее количество процедур управления процессом (или любой модуль, блок или подпрограмму), хранящихся в памяти 78. Процедуры управления процессом, хранящиеся в памяти 78, могут включать или быть связаны с контурами управления, реализуемыми в технологической установке. Вообще говоря, и как широко известно, контроллер процесса 11 выполняет одну или большее количество управляющих процедур и связывается с полевыми устройствами 15, 16, 17, 18, 19, 20, 21, 22, 60, 61, 62, 63, 64, 71, пользовательскими рабочими станциями 13 и сервером архивных данных 12 для управления процессом любым требуемым способом (способами).
[0027] Любое из полевых устройств 15, 16, 17, 18, 19, 20, 21, 22 и 71, проиллюстрированных на Фиг. 1, например, узлы регулирующих клапанов или позиционеры клапанов, и/или другие подходящие типы полевых устройств, используемых в технологической установке, можно откалибровать с использованием методов регулирования давления и/или провести его испытания, такие как испытания при неполном ходе (PST), с использованием методов регулирования давления, как описано здесь. Контроллер 11 и/или позиционер клапана, соединенный с соответствующим полевым устройством 15, 16, 17, 18, 19, 20, 21, 22 и 71, могут регулировать давление, действующее на приводной механизм, и измерять давление в приводном механизме для определения смещения I/P и/или другого подходящего смещения контроллера клапана. Контроллер 11 и/или позиционер клапана могут также линейно изменять давление в приводном механизме в сторону увеличения или уменьшения до предела давления с целью проверки хода приводного механизма (например, перемещения поршня приводного механизма). На Фиг. 4 более подробно проиллюстрирован такой контроллер и позиционер.
Позиционеры и узлы клапанов/приводных механизмов
[0028] В некоторых вариантах реализации изобретения одно или большее количество полевых устройств 15, 16, 17, 18, 19, 20, 21, 22 и 71, проиллюстрированных на Фиг. 1, могут быть позиционерами клапанов, соединенными с ESV или другими узлами клапанов/приводных механизмов, связанными с приборной системой безопасности. В таких случаях ESV или другие узлы клапанов/приводных механизмов могут быть в основном устройствами, работающими в режиме вкл/выкл, характеризующимися ослабленными соединениями, значительным мертвым ходом, высоким трением уплотнения и динамикой прерывистого движения. Такие характеристики дополнительно проиллюстрированы на Фиг. 2A, 2B и 2C.
[0029] В частности, на Фиг. 2А приведен график зависимости относительного перемещения от времени в течение ста секунд работы приводного механизма пневматического клапана, в течение которых осуществляется контроль за перемещением приводного механизма пневматического клапана. Как можно видеть на Фиг. 2А, перемещение пневматического клапана не представляет собой плавную кривую или линию. Скорее, движение приводного механизма пневматического клапана, как функция времени, включает в себя различные моменты «прилипания», представленные горизонтальными отрезками на кривой перемещения на Фиг. 2А, за которыми следуют моменты «проскальзывания» пневматического клапана, представленные вертикальными отрезками или ступеньками на кривой перемещения на Фиг. 2А.
[0030] На Фиг. 2В показан соответствующий график зависимости фактического давления (в приводном механизме пневматического клапана) от времени для такого же 100-секундного интервала, как описан со ссылкой на Фиг. 2А. При каждом проскальзывании приводного механизма пневматического клапана давление в приводном механизме резко повышается или снижается из-за резкого изменения объема в приводном механизме. Эта динамика прерывистого движения (прилипания и проскальзывания) дополнительно проиллюстрирована на Фиг. 2С, на которой приведен параметрический график значений перемещения и давления, показанных на Фиг. 2А и 2В (например, относительное перемещение и фактическое значение давления).
[0031] В некоторых вариантах реализации изобретения одно или большее количество полевых устройств 15, 16, 17, 18, 19, 20, 21, 22 и 71, проиллюстрированных на Фиг. 1, могут включать в себя позиционеры или сервоконтроллеры, соединенные с другими узлами клапанов/приводных механизмов, отличных от ESV, и управляющие ими. Эти другие узлы клапанов/приводных механизмов, такие как противопомпажные клапаны компрессора или вентиляционные клапаны, могут быть в основном выполнены с возможностью выполнения точных операций, таких как дросселирование и управление, в отличие от ESV, которые в первую очередь сконфигурированы как устройства включения/выключения.
[0032] В частности, одно или большее количество полевых устройств 15, 16, 17, 18, 19, 20, 21, 22 и 71, проиллюстрированных на Фиг. 1, могут быть позиционерами, содержащими золотниковые клапаны. Эти золотниковые клапаны, включенные в состав позиционеров, могут характеризоваться сбалансированной конструкцией, позволяющей золотниковым клапанам перемещаться в экстремальных условиях, например, при очень высоком давлении. Таким образом, позиционеры, содержащие золотниковые клапаны, могут работать аналогичным образом при многих различных значениях давления, и их можно откалибровать и/или испытывать при различных значениях давления или в диапазоне значений давления.
[0033] В некоторых случаях в позиционерах, содержащих золотниковые клапаны, могут использоваться методы регулирования давления в конечной точке. В частности, когда регулируемый клапан установлен в конечной точке (например, полностью открыт или полностью закрыт), этот тип позиционера может регулировать давление в регулируемом клапане или воздействующее на него давление («регулирование давления в конечной точке») так, что регулируемое значение давления будет ниже или выше максимального или минимального давления, соответственно, которое может воздействовать на регулируемый клапан. Таким образом, позиционер может быстрее сместить или переместить регулируемый клапан из конечной точки по сравнению с ситуациями, когда давление находится на максимальном или минимальном уровне. В этих случаях описанные ниже позиционеры могут выполнять калибровки в ходе регулирования давления в конечной точке, так что позиционеры и соответствующие регулируемые клапаны калибруются в процессе эксплуатации последних (например, без прерывания процесса).
[0034] Одно или большее количество полевых устройств 15, 16, 17, 18, 19, 20, 21, 22 и 71, проиллюстрированных на Фиг. 1, могут также быть позиционерами, содержащими пневматическое реле или тарельчатый клапан, приводимый в действие узлом диафрагмы. Этот тип позиционера может иметь несбалансированную конструкцию, так что смещение позиционера зависит от давления, действующего на регулируемый клапан или в нем. Позиционеры, содержащие пневматические реле, могут выполнять калибровку (например, смещения I/P) при среднем значении давления в диапазоне значений давления, таком как диапазон значений давления, определяемый при калибровке.
[0035] Изображенный на Фиг. 3 иллюстративный позиционер 200 может управлять узлом приводного механизма/клапана 202, таким как узел приводного механизма/клапана, действующий, как показано на Фиг. 2А, 2В и 2С, или другой подходящий узел приводного механизма/клапана (противопомпажный клапан компрессора, вентиляционный клапан и т.д.). В некоторых случаях позиционер 200 может быть выполнен с возможностью осуществления испытаний при неполном ходе или других испытаний узла приводного механизма/клапана 202. С этой целью позиционер 200 может быть пневматически и/или электрически соединен с узлом приводного механизма/клапана 202 через соединение 204 и соединен с возможностью передачи данных с контроллером 206.
[0036] В частности, позиционер 200 может регулировать давление в узле приводного механизма/клапана 202 или действующее на этот узел давление на основе сигналов (например, аналоговых или цифровых), получаемых от контроллера 206, и/или на основе логики управления 208. Например, контроллер 206 может генерировать различные сигналы (например, сигналы 4-20 мА), соответствующие значению уставки или запросам на выполнение калибровок и/или тестов. Под действием этих сигналов, получаемых от контроллера 206, позиционер 200 может формировать выходной пневматический сигнал для управления узлом приводного механизма/клапана 202 на основе логики управления 208, хранящейся в одном или большем количестве энергонезависимых запоминающих устройств 210 позиционера 200. Логика управления 208 может реализовать по меньшей мере часть одного или большего количества контуров управления и может выполняться одним или большим количеством процессоров 212 позиционера 200. В некоторых вариантах реализации изобретения позиционер 200 может генерировать внутренний сигнал тока на основе сигнала тока, полученного от контроллера 206 (например, сигнала 4-20 мА). Этот внутренний сигнал тока может подаваться на преобразователь тока/давления (I/P) и компонент золотникового клапана/реле 230 позиционера 200. На основе внутреннего сигнала тока I/P и компонент золотникового клапана/реле 230 может создавать выходное давление, воздействующее на узел приводного механизма/клапана 202 через пневматическое соединение 204.
[0037] Контуры управления, реализованные логикой управления 208, могут получать сигналы обратной связи по давлению и/или перемещению от одного или нескольких датчиков 214 в позиционере 200 и/или любого количества других датчиков, соединенных с позиционером 200 и/или узлом приводного механизма/клапана 202. Эти датчики 214 могут направлять значения давления и/или перемещения логике управления 208. Более подробное описание иллюстративных контуров управления, которые могут, по меньшей мере частично, быть реализованы иллюстративным позиционером 200, приведено со ссылкой на Фиг. 11.
[0038] Логика управления 208 может включать в себя процедуру калибровки 219. При выполнении одним или большим количеством процессоров 212 процедура калибровки 219 может привести к тому, что позиционер 200 будет регулировать давление в узле приводного механизма/клапана 202 или действующее на него. В некоторых случаях процедура калибровки 219 может приводить к тому, что позиционер 200 будет регулировать давление в узле приводного механизма/клапана 202 или действующее на него при постоянном объеме в ходе регулирования давления в конечной точке, при среднем значении давления в диапазоне значений давления или в любое другое подходящее время или при другом подходящем состоянии узла приводного механизма/клапана 202. В частности, процедура калибровки 219 может работать в сочетании с логикой управления 208 (как показано на Фиг. 3) или как отдельная процедура для подачи управляющих сигналов в I/P и компонент золотникового клапана/реле 230. Эти сигналы могут приводить к тому, что I/P и компонент золотникового клапана/реле 230 будут регулировать давление в узле приводного механизма/клапана 202 или действующее на него, в то время как процедура калибровки 219 корректирует смещение I/P или другое подходящее смещение позиционера 200. Процедура калибровки 219 может регулировать смещение I/P путем замены номинального смещения на скорректированное смещение таким образом, чтобы разница между скорректированным смещением и номинальным смещением учитывалась при дальнейшем управлении узлом приводного механизма/клапана 202. Более подробно иллюстративный способ калибровки позиционера с регулированием давления, который может быть, по меньшей мере частично, реализован процедурой калибровки 219, описан со ссылкой на Фиг. 4.
[0039] В некоторых вариантах реализации изобретения I/P и компонент золотникового клапана/реле 230 позиционера 200 может подавать сигнал обратной связи положения золотникового клапана и/или пневматического реле I/P и компонента золотникового клапана/реле 230 управляющей логике 208. Логика управления 208 может использовать такой сигнал обратной связи, например, в демпфирующем члене контура управления. Для использования этой обратной связи процедура калибровки 219 может определять и/или регулировать нулевое состояние золотникового клапана или пневматического реле или смещение напряжения обратной связи вспомогательного контура в дополнение к смещению I/P или вместо него. Например, перемещение пневматического реле может составлять от 9000 до 19000 отсчетов с номинальной рабочей точкой 13000 отсчетов. В этом примере сигнал обратной связи управляющей логике 208 может быть нормированным значением, зависящим от измеренного перемещения (например, в отсчетах) пневматического реле за вычетом номинальной рабочей точки. Такой сигнал обратной связи равен нулю у нулевого состояния пневматического реле и становится положительным или отрицательным в зависимости от хода пневматического реле, причем нулевое состояние может регулироваться в ходе процедуры калибровки 219.
[0040] Логика управления 208 может также включать в себя процедуру испытания при неполном ходе 220. При выполнении одним или большим количеством процессоров 212 процедура испытания при неполном ходе 220 может привести к тому, что узел приводного механизма/клапана 202 будет проходить испытание при неполном ходе для проверки работы узла приводного механизма/клапана 202. Например, процедура испытания при неполном ходе 220 может осуществляться логикой управления 208 (как показано на Фиг. 3) или в качестве отдельной процедуры для подачи управляющих сигналов I/P и компоненту золотникового клапана/реле 230. Эти сигналы могут приводить к тому, что I/P и компонент золотникового клапана/реле 230 будут линейно изменять давление в узле приводного механизма/клапана 202 или действующее на него, чтобы вызвать перемещение узла приводного механизма/клапана 202. Более подробно иллюстративный способ выполнения испытания при неполном ходе, который может быть, по меньшей мере частично, реализован процедурой испытания при неполном ходе 220, описан со ссылкой на Фиг. 8.
[0041] Как указано выше, контроллер 206 может инициировать или иным образом приводить к тому, что позиционер 200 инициирует калибровку и/или испытания (например, PST), или сам позиционер 200 может инициировать такие калибровки или тесты периодически или в иным образом определенные моменты времени. Кроме того, в некоторых вариантах реализации изобретения позиционер 200 или отдельное устройство, модуль или компонент, функционально связанный(ое) с позиционером 200, может содержать одну или большее количество кнопок, переключателей, панелей управления, сенсорных экранов или других интерфейсов, позволяющих оператору-человеку вручную инициировать калибровку или испытания на позиционере 200 (например, путем нажатия кнопок, ввода кодов и т.д.). В некоторых случаях оператор-человек может также переопределять ранее инициированные калибровки или PST (например, инициированные контроллером 206), чтобы остановить, отменить или иным образом изменить калибровки или PST в определенных ситуациях, таких как аварийная ситуация, тестирование, техническое обслуживание или другие ситуации.
[0042] Хотя на Фиг. 3 проиллюстрированы процессоры 212, запоминающие устройства 210, логика управления 208, процедура калибровки 219 и процедура испытания при неполном ходе 220 в виде компонентов позиционера 200, контроллер 206 может в альтернативном варианте или дополнительно содержать по меньшей мере некоторые компоненты, по существу аналогичные процессорам 212, запоминающим устройствам 210, логике управления 208, процедуре калибровки 219 и процедуре испытания при неполном ходе 220. Фактически, в некоторых вариантах реализации изобретения контроллер 206 может реализовать все или большую часть функций калибровки и испытаний, описанных со ссылкой на Фиг. 4 и 8, для регулирования значений давления в узле приводного механизма/клапана 202 и/или для проведения испытаний при неполном ходе в узле приводного механизма/клапана 202. В целом, функциональность, связанная с регулированием давления в узле приводного механизма/клапана 202 и/или проведением испытаний при неполном ходе в узле приводного механизма/клапана 202, может быть распределена любым подходящим образом между контроллером 206 и позиционером 200.
Калибровка позиционеров
[0043] На Фиг. 4 проиллюстрирована блок-схема примера способа 400 калибровки позиционера, такого как позиционер 200, с использованием методов регулирования давления. В частности, иллюстративный способ 400 может использоваться для определения смещения, такого как смещение тока/давления (I/P) или смещение напряжения обратной связи вспомогательного контура позиционера 200. Для простоты описания компоненты иллюстративного позиционера 200 могут быть указаны в описании способа 400, однако сам способ 400 может использоваться для калибровки любого подходящего устройства, соединенного с узлом приводного механизма/клапана, и может быть реализован посредством любой подходящей комбинации контроллера и устройства, соединенного с узлом приводного механизма/клапана.
[0044] Позиционер 200 может определять значения давления, соответствующие определенному состоянию узла приводного механизма/клапана 202, например, одному или большему количеству остановов с упором или концевых точек, ограничителей хода, неподвижных положений, средних точек диапазона значений давления (например, определяемых при калибровке) и т.д. (блок 402). В некоторых случаях тестовая калибровка приводного механизма может определять диапазон избыточного давления (например, от трех до пятнадцати фунтов на квадратный дюйм избыточного давления (0,122 - 0,205 МПа)), что соответствует от 0% до 100% перемещения приводного механизма. В таких случаях позиционер 200 может определять давление чуть ниже нижнего предела диапазона давления или чуть выше верхнего предела диапазона давления. Например, для тестовой калибровки от трех до пятнадцати фунтов на квадратный дюйм изб. давления (0,122 - 0,205 МПа) позиционер 200 может определять давление между нулем и тремя фунтами на квадратный дюйм изб. давления ( 0 - 0,122 МПа) для поддержания фиксированного объема при нижних значениях давления тестовой калибровки от пятнадцати до двадцати фунтов на квадратный дюйм изб. давления (0,205 - 0,239 МПа) для поддержания фиксированного объема при верхних значениях. В других случаях, когда значения тестовой калибровки не известны, позиционер 200 может определять давление на основе предварительно определенного или приблизительного значения. Например, позиционер 200 может определить давление 0 + 2 = 2 фунт/кв. дюйм изб. давления (0,115 МПа) для поддержания фиксированного объема при предполагаемом нижнем конце хода приводного механизма или давление 20-2 = 18 фунт/кв. дюйм изб. давления (0,225 МПа) для поддержания фиксированного объема на предполагаемом верхнем конце хода приводного механизма.
Позиционер 200 может определять такое давление при использовании методов регулирования давления в конечной точке. Например, позиционер 200 может выполнять регулирование давления в конечной точке, чтобы предотвратить достижение в узле приводного механизма/клапана 202 максимального или минимального возможного значения давления. Позиционер 200 может определять значение давления немного ниже максимального значения давления или немного выше минимального значения давления, когда узел приводного механизма/клапана 202 расположен в конечной точке (например, полностью открыт или полностью закрыт).
[0045] В других случаях позиционер 200 может определять значение давления вблизи середины или в другом относительном положении в диапазоне значений давления. Например, если позиционер 200 содержит пневматическое реле, позиционер 200 может определять конкретное значение давления где-то между предельными значениями давления (например, определяемыми при калибровке). Определенное давление может быть значением давления в середине диапазона (например, с тем же абсолютным значением разности давлений между средним значением и верхним и нижним пределами давления). Тем не менее, позиционер 200 может определять давление в любом подходящем положении в диапазоне значений давления, например, на уровне десяти процентов относительного давления, двадцати процентов относительного давления и т.д. Позиционер 200 может даже определять несколько значений давления в диапазоне значений давления для определения нескольких разных значений смещения для пневматического реле.
[0046] Возвращаясь к Фиг. 4, позиционер 200 может регулировать давление в узле приводного механизма/клапана 202 при поддержании узла приводного механизма/клапана 202 в определенном конкретном состоянии узла приводного механизма/клапана 202 (блок 404). Т.е. позиционер 200 может поддерживать постоянный объем в узле приводного механизма/клапана 202 при регулировании давления в узле приводного механизма/клапана 202, поддерживать давление в узле приводного механизма/клапана 202 вблизи конечной точки узла приводного механизма/клапана 202 (например, при регулировании давления в конечной точке) или поддерживать давление в узле приводного механизма/клапана 202 на уровне определенного значения давления в диапазоне значений давления. Например, позиционер 200 может регулировать давление при постоянном объеме, регулируя давление в узле приводного механизма/клапана 202 в соответствии с уставкой давления, которая находится выше или ниже определенного верхнего или нижнего предела давления, соответственно, определяемого в блоке 402. В альтернативном варианте или дополнительно позиционер 200 может регулировать давление в диапазоне значений давления или при значении давления, используемом при регулировании в конечной точке (например, когда узел приводного механизма/клапана 202 находится вблизи конечной точки, такой как полностью открытое состояние), посредством регулирования давления в узле приводного механизма/клапана 202 в соответствии с уставкой давления, которая находится в диапазоне значений давления (например, в середине диапазона) или ниже/выше максимального или минимального давления, соответственно, и определяется в блоке 402.
[0047] Хотя давление регулируется в определенном состоянии узла приводного механизма/клапана 202, позиционер 200 может регулировать смещение позиционера 200 на основании уставки, сигнала обратной связи, указывающего фактическое давление в узле приводного механизма/клапана 202, и/или номинального смещения или смещения по умолчанию позиционера 200 (блок 406). В некоторых вариантах реализации изобретения позиционер 200 может регулировать смещение по умолчанию или номинальное смещение (например, имеющиеся значения, сохраненные в позиционере 200, или значения по умолчанию, предоставленные позиционеру 200), пока мера ошибки давления на протяжении периода времени удовлетворяет критерию сходимости (например, находится на уровне или ниже порога в течение определенного периода времени). Мера ошибки может быть по меньшей мере частично основана на различии между сигналом обратной связи, указывающим фактическое давление в узле приводного механизма/клапана 202, и уставкой. Мера ошибки может, по меньшей мере в некоторых вариантах реализации изобретения, соответствовать интегральной составляющей в пропорционально-интегрально-дифференциальном (PID) контроллере, интегрированном в логику управления 208.
[0048] Позиционер 200 может обновлять смещение позиционера 200 (например, номинальное смещение или смещение по умолчанию) в соответствии с корректировками в блоке 406 (блок 408), или позиционер 200 может заменять смещение по умолчанию измененным смещением на основе регулирования в блоке 406. Это обновление и/или замена могут обеспечивать использование при последующем управлении узлом приводного механизма/клапана 202 новейшего скорректированного смещения позиционера 200. Например, перед вводом позиционера 200 в эксплуатацию оператор или логика управления 208 могут сконфигурировать позиционер 200 с использованием смещения по умолчанию или номинального смещения (например, путем задания уставки перемещения на уровне 50% и включения интегратора хода). Затем позиционер 200 может определять скорректированную меру смещения позиционера 200, как описано выше, и позиционер 200 может обновлять смещение по умолчанию или номинальное смещение в соответствии со скорректированной мерой смещения. Таким образом, позиционер 200 может уточнить смещение по умолчанию или другое используемое смещение в подходящее время и/или на протяжении времени, чтобы компенсировать изменения смещения, вызванные температурой, износом, старением компонентов и т.д.
[0049] На Фиг. 5 проиллюстрирован пример контура управления 500 с использованием меры смещения I/P, причем указанная мера смещения I/P может быть сгенерирована в соответствии со способом 400. Контроллер 206 и/или позиционер 200 могут, например, реализовать по меньшей мере часть контура управления 500. В частности, позиционер 200 может реализовать часть 504 контура управления 500. В других вариантах реализации изобретения функциональность части 504 контура управления 500 может быть разделена любым подходящим образом между позиционером 200 и контроллером 206.
[0050] Позиционер 200 может принимать значения обратной связи по давлению, указывающие давление в приводном механизме 506 или воздействующее на него. Позиционер 200 может также генерировать управляющий сигнал (например, управляющий сигнал 0-1,42 мА), соответствующий давлению, на основе значений обратной связи по давлению, уставки давления (или SP) и различных составляющих схемы контура управления 500. По меньшей мере некоторые из этих различных составляющих (Ki/s, K и т.д.) могут быть добавлены или иным образом объединены с уставкой давления для генерирования управляющего сигнала, и, в частности, мера смещения I/P может быть добавлена к смещению по умолчанию для учета смещения позиционера 200.
[0051] После получения управляющего сигнала компонент I/P 510 и компонент реле/золотникового клапана 512 позиционера 200 может вызвать подачу давления в приводной механизм 506 для обеспечения перемещения. Поскольку позиционер 200 учитывает смещение I/P позиционера 200, он может точно регулировать давление, подаваемое на приводной механизм 506 по меньшей мере в пределах заранее определенных допусков. Такая точность может иметь важное значение при управлении узлами приводных механизмов/клапанов с высоким коэффициентом усиления, поскольку, например, небольшие изменения давления могут привести к значительным перемещениям узлов приводного механизма/клапана с высоким коэффициентом усиления. Эта точность также может иметь важное значение в других типах узлов приводного механизма/клапана для калибровки узлов приводного механизма/клапана или устройств, таких как позиционеры, соединенных с узлами приводного механизма/клапана, в процессе эксплуатации узлов приводного механизма/клапана. Кроме того, путем корректировки смещения при нахождении клапана в позиции останова с упором (например, в ходе регулирования давления в конечной точке) в некоторых вариантах реализации позиционеры могут корректировать смещение для учета изменений температуры, износа и старения компонентов, не прерывая процесс (например, без необходимости выключения технологической линии).
Испытания узлов приводного механизма/клапана
[0052] В некоторых вариантах реализации изобретения контроллеры, такие как контроллер 11 или контроллер 206, могут запускать в позиционерах, таких как позиционер 200, испытание узлов приводного механизма/клапана. Эти испытания могут обеспечить работоспособность узлов приводного механизма/клапана (например, способность приводного механизма или поршня перемещаться). Например, некоторые регулирующие органы могут требовать проведения таких испытаний. В частности, позиционеры, такие как позиционеры клапанов, соединенные с ESV, могут выполнять испытания при неполном ходе узлов приводного механизма/клапана для проверки работы по открытию или закрытию клапана без его полного открытия или закрытия, чтобы не нарушать ход техпроцесса.
[0053] При выполнении испытания при неполном ходе позиционеры и/или контроллеры настоящего изобретения могут использовать методы регулирования давления, а не методы управления перемещением или позиционированием. Таким образом, трудности, связанные с ослабленными соединениями, значительным мертвым ходом, высоким трением уплотнения и динамикой прерывистого движения, могут быть, например, сведены к минимуму (например, путем уменьшения ошибок ниже допуска), и/или испытания могут проводиться, даже если функция управления перемещением устройства не работает или работает неправильно. Чтобы проиллюстрировать эти моменты и сравнить с существующими способами регулирования давления для испытаний при неполном ходе (PST), на Фиг. 6А, 6В и 6С проиллюстрировано испытание при неполном ходе приводного механизма пневматического клапана с использованием методов управления перемещением. Хотя конкретный пневматический приводной механизм, обладающий определенными характеристиками, рассмотрен со ссылкой на Фиг. 6A, 6B и 6C, позиционеры могут использовать регулирование давления для проверки любых подходящих типов клапанов, таких как ESV, противопомпажные клапаны компрессора, вентиляционные клапаны и т.д.
[0054] В частности, на Фиг. 6А проиллюстрирован график зависимости относительного перемещения от времени для 20-секундного интервала работы приводного механизма пневматического клапана или отклонения от уставки хода со скоростью 1%/с до 20% отклонения. График иллюстрирует первоначальный переход приводного механизма пневматического клапана из положения останова с упором, в ходе которого происходит его разгрузка от воздействия подаваемого давления к верхнему значению калибровочного давления (или верхнему калибровочному значению). Эта динамика дополнительно проиллюстрирована на графике зависимости давления от времени, приведенном на Фиг. 6B (соответствует тому же двадцатисекундному интервалу наблюдения). На начальном этапе перемещения приводного механизма пневматического клапана из положения останова с упором наблюдаются значительные изменения давления.
[0055] При рассмотрении параметрического графика зависимости давления от относительного перемещения для двадцатисекундного периода наблюдения, показанного на Фиг. 6C, можно видеть четкое несимметричное (например, изменяющееся во времени) поведение приводного механизма пневматического клапана во время PST. К такому поведению могут привести эффект Бернулли и/или эффект критического потока вокруг датчика давления . Т.е. высокие скорости в приводном устройстве могут искажать показания датчика давления, так что показание не будет точно отражать фактическое давление в приводном механизме. Поскольку некоторые предупреждения (например, предупреждения, соответствующие заклинившим клапанам) могут появляться при достижении порога давления, неправильные показания давления могут привести к ложным срабатываниям. В целом, такой тип поведения и/или другие типы поведения, наблюдаемого при управлении перемещением (например, в результате динамики прерывистого движения), могут усложнить PST и привести к тому, что давление в приводном механизме пневматического клапана выйдет из-под контроля (например, контроллера) в случае заклинивания клапана.
[0056] В отличие от PST при управлении перемещением, данные методы позволяют использовать регулирование давления для проведения PST. В частности, позиционер может вызвать линейное изменение давления в узле приводного механизма/клапана от начального давления к минимальному или максимальному значению давления. При достижении минимального или максимального давления или при обнаружении перемещения узла приводного механизма/клапана позиционер может вызвать линейное изменение давления обратно к первоначальному уровню. Таким образом, давление в узле приводного механизма/клапана всегда находится под контролем.
[0057] На Фиг. 7A, 7B и 7C проиллюстрирована ситуация, в которой PST выполняется с использованием методов регулирования давления. На Фиг. 7А и 7В приведены графики зависимости относительного перемещения от времени и давления (и уставки давления) от времени, соответственно, при линейном изменении давления со скоростью 1%/с в приводном механизме пневматического клапана аналогично приводному механизму пневматического клапана, испытание которого показано на Фиг. 6A, 6B и 6C. Как видно на ФИГ. 7А и 7В, относительное перемещение приводного механизма пневматического клапана остается почти постоянным, в то время как давление в приводном м6еханизме пневматического клапана изменяется в сторону предела давления (например, двадцать фунтов на квадратный дюйм изб. давления (фунт/кв. дюйм изб. давления) (0,239 МПа)), как показано пунктирной линией на Фиг. 7B).
[0058] В определенное время (около шестидесяти пяти секунд) приводной механизм пневматического клапана перемещается, и в это время изменение давления может быть обращено назад к начальному давлению (до достижения предела давления в этом случае). Во время PST, даже в моменты, когда перемещение приводного механизма пневматического клапана остается почти постоянным, давление в приводном механизме пневматического клапана регулируется, как дополнительно показано на Фиг. 7C в виде симметричного и плавного результирующего давления и перемещения приводного механизма пневматического клапана.
[0059] На Фиг. 8 показана блок-схема иллюстративного способа 800 испытания узла приводного механизма/клапана с использованием методов регулирования давления. Способ 800 может быть реализован с использованием, например, подходящей комбинации контроллеров 11 и 206 и позиционера 200. Для удобства описания компоненты иллюстративного позиционера 200, такие как процедура испытания при неполном ходе 220, могут быть указаны в описании способа 800, но, в целом, способ 800 может использоваться любым подходящим контроллером или позиционером для испытания любого подходящего приводного механизма/клапана.
[0060] Контроллер 206 и/или позиционер 200 могут выполнять процедуру испытания при неполном ходе 220, чтобы определить предел давления и/или предел хода (блок 802). Процедура испытания при неполном ходе 220 может использовать пределы давления и хода во время контролируемого изменения давления в узле приводного механизма/клапана 202. В некоторых вариантах реализации изобретения процедура испытания при неполном ходе 220 определяет предел давления, который является предварительно сконфигурированным значением давления, запрограммированным или иным образом сконфигурированным, в процедуре испытания при неполном ходе 220. В других вариантах реализации изобретения процедура испытания при неполном ходе 220 может извлекать предел давления из устройства хранения данных (например, базы данных), функционально связанного с контроллером 206, или процедура испытания при неполном ходе 220 может даже определять предел давления почти в режиме реального времени (например, при выполнении для проведения испытания при неполном ходе) на основе вводимых пользователем данных в контроллер 206, текущих или хронологических значений давления и/или движения и т.д., передаваемых по обратной связи.
[0061] Предел давления (например, запрограммированный в качестве параметра в процедуре испытания при неполном ходе 220) может определять давление, такое, что ожидается перемещение узла приводного механизма/клапана 202 (например, на основе предыдущих калибровочных испытаний), когда процедура испытания при неполном ходе 220 линейно изменяет давление в узле приводного механизма/клапана 202 в сторону предела давления. В некоторых случаях предел давления определяет такое давление, что узел приводного механизма/клапана 202 не перемещается за пределы максимального хода или относительного перемещения (например, 20%), когда давление в узле приводного механизма/клапана 202 увеличивается до предела давления. Таким образом, процедура испытания при неполном ходе 220 может проверять работу узла приводного механизма/клапана 202, при этом предотвращая прерывание процесса, которое могло бы иметь место при перемещении узла приводного механизма/клапана 202 за пределы максимального хода.
[0062] Предел давления может быть верхним пределом давления или нижним пределом давления в зависимости от конфигурации узла приводного механизма/клапана 202. Например, если узел приводного механизма/клапана 202 является нормально открытым ESV, позиционер 200 может использовать нижний предел давления, тогда как позиционер 200 может использовать верхний предел давления для нормально закрытого ESV.
[0063] Процедура испытания при неполном ходе 220 включает в себя изменение давления в узле приводного механизма/клапана 202 от начального давления в узле приводного механизма/клапана 202 до предела давления (блок 804). Например, процедура испытания при неполном ходе 220 и/или другие компоненты логики управления 208 могут реализовать по меньшей мере части контура регулирования давления, такие как один из контуров регулирования давления, рассмотренных со ссылкой на Фиг. 5 и 11, чтобы обеспечивать линейное изменение давления в сторону предела давления.
[0064] Процедура испытания при неполном ходе 220 может затем определить, достиг ли узел приводного механизма/клапана 202 предела хода (блок 806). Например, один или большее количество датчиков, воспринимающих движение узла приводного механизма/клапана 202, могут передавать данные обратной связи, соответствующие перемещению или относительному перемещению (например, проценту от общего хода), позиционеру 200. В некоторых вариантах реализации изобретения позиционер 200 может продолжать изменять давление до тех пор, пока не будет обнаружен определенный процент общего перемещения узла приводного механизма/клапана 202 (например, 20% предела относительного перемещения), тогда как в других вариантах реализации изобретения позиционер 200 может продолжать изменение давление до обнаружения любой величины (например, любого конечного количества) перемещения узла приводного механизма/клапана 202.
[0065] Если предел хода узла приводного механизма/клапана 202 достигнут, процесс может продолжаться до блока 808, где процедура испытания при неполном ходе 220 может обратить изменение давления таким образом, что давление возвращается к начальному давлению. Однако если не обнаружено перемещение, или относительное перемещение меньше предела хода, процесс может продолжаться до блока 810. На этапе 810 процедура испытания при неполном ходе 220 может определять, достигнут ли предел давления. Если предел давления достигнут, процесс может продолжаться до блока 808, но если предел давления не достигнут, процесс может вернуться к блоку 804, где изменение давления будет продолжаться в направлении предела давления.
[0066] В некоторых вариантах реализации изобретения вместо простого обращения изменения давления при обнаружении движения или обнаружении относительного перемещения позиционер 200 (например, процедура испытания при неполном ходе 220) может регулировать давление в узле приводного механизма/клапана 202, чтобы: (i) обеспечить возврат к начальному давлению на ограниченную величину, а (ii) затем продолжить возврат к начальному давлению. Таким образом, позиционер 200 может почти мгновенно повторно инициализировать давление перед началом обратного его изменения в сторону первоначального значения. Таким образом, позиционер 200 может свести к минимуму дальнейший дрейф узла приводного механизма/клапана 202 за пределы обнаруженного хода или величины относительного перемещения.
[0067] На Фиг. 9А, 9В и 9С приведены графики, аналогичные графикам на Фиг. 7А, 7В и 7В, иллюстрирующие зависимость давления (и уставки давления) от времени, относительного перемещения от времени и давления от относительного перемещения при изменении давления в приводном механизме пневматического клапана со скоростью 1%/с. Однако вместо простого обращения направления линейного изменения давления, как показано на Фиг. 7А, на Фиг. 9А проиллюстрировано ступенчатое изменение давления при обнаружении движения приводного механизма пневматического клапана (примерно через шестьдесят пять секунд) и последующего изменения давления назад к начальному значению. Используя это ступенчатое изменение давления, позиционер может препятствовать дрейфу приводного механизма пневматического клапана за пределы максимального требуемого перемещения (показано пунктирной линией на Фиг. 9В).
[0068] Хотя на Фиг. 9А, 9В и 9С приведены кривые, иллюстрирующие ступенчатое изменение давление при обнаружении движения приводного механизма пневматического клапана, контроллеры и/или позиционер могут обеспечивать ступенчатое изменение давления в любое подходящее время в процессе испытаний при неполном ходе. Например, процедура испытания при неполном ходе 220 может: (i) выполнять ступенчатое изменение давления в начале испытания при неполном ходе от начального давления до предварительно определенного значения давления, а (ii) затем выполнять линейное изменение давления от предварительно определенного значения до предела давления. Такая процедура может обеспечить проведение более эффективных с точки зрения затрачиваемого времени испытаний при неполном ходе. Как правило, ступенчатое изменение давления может происходить в начале, в конце, при обнаружении движения и/или в любой другой момент во время испытания при неполном ходе.
[0069] Кроме того, позиционер может дополнительно уменьшить дрейф приводного механизма пневматического клапана за пределы максимального перемещения или относительного перемещения с использованием динамических скоростей линейного перемещения, как показано на Фиг. 10A, 10B и 10C. На Фиг. 10A, 10B и 10C приведены графики, аналогичные графикам на Фиг. 7A, 7B, 7B, 9A, 9B и 9C, иллюстрирующие зависимость давления (и уставки давления) от времени, относительного перемещения от времени и давления от относительного перемещения при изменении давления в приводном механизме пневматического клапана со скоростью 1%/с. Однако, в отличие от Фиг. 7А, 7В, 7В, 9А, 9В и 9С используются две скорости линейного изменения давления в сторону предела давления. Например, линейное изменение давления может замедляться при приближении к пределу давления - одному или нескольким пороговым значениям давления. Как можно видеть на Фиг. 10В, такое динамичное изменение дополнительно предотвращает дрейф приводного механизма пневматического клапана за пределы максимального требуемого перемещения или относительного перемещения (как показано пунктирной линией на Фиг. 10В). Хотя в испытании, показанном на Фиг. 10А, 10В и 10С, используются две скорости изменения, следует понимать, что любое количество скоростей изменения может использоваться при изменении давления в сторону предела давления и/или при обратном изменении давления в направлении к начальному давлению.
[0070] На Фиг. 11 проиллюстрирован пример контура управления 1100, который может использоваться (например, позиционером 200) для выполнения испытаний при неполном ходе или других испытаний с использованием методов управления давлением, как описано далее со ссылкой на Фиг. 8. Контроллер 206 и/или позиционер 200 могут, например, реализовать по меньшей мере часть контура управления 1100. В частности, иллюстративный позиционер 200 может реализовывать часть 1104 контура управления 1100. Как и в случае контура управления 500, некоторые варианты реализации контура управления 1100 могут содержать компоненты контура управления 1100 (например, части 1104), распределенные любым подходящим образом между позиционером и контроллером, таким как контроллер 206.
[0071] В контуре управления 1100 позиционер 200 может получать значения обратной связи по давлению от приводного механизма 1106. Однако в контуре управления 1100 позиционер 200 также может получать значения обратной связи по перемещению от приводного механизма 1106. Позиционер 200 может генерировать управляющий сигнал (например, номинальный сигнал 1 мА плюс или минус 0,4 мА), указывающий давление на основе внутренней части регулирования давления 1108 контура управления 1100, вложенной во внешнюю часть управления перемещением 1110 контура управления 1100.
[0072] Внутренняя часть регулирования давления 1108 контура управления 1100 может быть по существу аналогична частям контура управления 500, выполненным с возможностью генерирования управляющего сигнала для позиционера 200 на основе значений обратной связи по давлению, уставки давления (или SP) и различных интегральных, пропорциональных или дифференциальных составляющих внутренней части регулирования давления 1108. Встраивая эту внутреннюю часть регулирования давления 1108 во внешнюю часть управления перемещением 1110 контура управления 1100, позиционер 200, реализующий контур управления 1100, может изменять давление в узле приводного механизма/клапана 202 до тех пор, пока не будут выполнены определенные конкретные условия перемещения. Например, позиционер 200 может изменять давление в узле приводного механизма/клапана 202 до тех пор, пока узел приводного механизма/клапана 202 не совершит перемещение на какую-либо конечную величину, заранее определенную величину, определенный процент общего хода и т.д., при регулировании контроллером перемещения 1112 внешней части управления перемещением контура управления 1100.
Дополнительные сведения
[0073] Хотя настоящее изобретение было описано со ссылкой на конкретные примеры, которые предназначены только для иллюстрации и не должны ограничивать изобретение, специалистам в данной области техники будет очевидно, что возможны изменения, дополнения или удаления в описанных вариантах реализации изобретения, не выходя за пределы сущности и объема изобретения.
[0074] Следующие аспекты представляют примеры вариантов осуществления описанных способов и систем. Данный список аспектов должен быть неограничивающим, поскольку другие варианты реализации изобретения предусмотрены описанием настоящего изобретения.
[0075] 1. Способ калибровки позиционера, включающий:
определение значения давления, соответствующего определенному состоянию приводного механизма, управляемого позиционером;
регулирование позиционером давления в приводном механизме в соответствии с уставкой давления, основанной на значении давления, соответствующем поддержанию определенного состояния приводного механизма;
получение измеренного значения, указывающего фактическое давление в приводном механизме; и
определение смещения позиционера на основе измеренного значения и уставки давления.
[0076] 2. Способ согласно аспекту 1, дополнительно включающий управление позиционером приводным механизмом для выполнения одной или большего количества функций управления процессом, причем указанное управление приводным механизмом для выполнения одной или большего количества функций управления процессом включает выполнение логики управления, которая учитывает определенное смещение позиционера.
[0077] 3. Способ согласно аспекту 1 или аспекту 2, отличающийся тем, что конкретное состояние приводного механизма определяется постоянным объемом приводного механизма, и тем, что определение значения давления, соответствующего постоянному объему приводного механизма, включает в себя определение верхнего предела калибровочного давления приводного механизма.
[0078] 4. Способ по предшествующему аспекту, отличающийся тем, что уставка давления, основанная на значении давления, превышает верхний предел давления.
[0079] 5. Способ по любому из предшествующих аспектов, отличающийся тем, что конкретное состояние приводного механизма определяется постоянным объемом приводного механизма, и тем, что определение значения давления, соответствующего постоянному объему приводного механизма, включает в себя определение нижнего предела калибровочного давления приводного механизма.
[0080] 6. Способ по предшествующему аспекту, отличающийся тем, что уставка давления, основанная на значении давления, ниже нижнего предела давления.
[0081] 7. Способ по любому из предшествующих аспектов, отличающийся тем, что конкретное состояние приводного механизма определяется диапазоном значений давления в приводном механизме или воздействующего на него, и тем, что определение значения давления включает в себя определение значения давления, находящегося в диапазоне значений давления.
[0082] 8. Способ по любому из предшествующих аспектов, отличающийся тем, что конкретное состояние приводного механизма имеет место, когда приводной механизм работает в режиме регулирования давления в конечной точке, и тем, что определение значения давления включает в себя определение значения давления, которое должно использоваться при регулировке давления в конечной точке.
[0083] 9. Способ по любому из предшествующих аспектов, отличающийся тем, что приводной механизм является частью приборной системы безопасности.
[0084] 10. Способ по любому из предшествующих аспектов, дополнительно включающий: получение внутреннего измеренного значения, указывающего перемещение золотникового клапана или пневматического реле внутри позиционера; и определение смещения напряжения обратной связи вспомогательного контура золотникового клапана или пневматического реле на основе внутреннего измеренного значения.
[0085] 11. Система управления процессом, содержащая:
приводной механизм; и
позиционер, соединенный с приводным механизмом, и
при этом позиционер выполнен с возможностью управления приводным механизмом с учетом смещения позиционера, а позиционер определяет смещение посредством:
регулирования давления в приводном механизме в соответствии с уставкой давления, при этом определенное состояние приводного механизма поддерживается, пока осуществляется регулирование давления в приводном механизме,
получения измеренного значения, указывающего фактическое давление в приводном механизме; и
определения смещения позиционера на основе измеренного значения и уставки давления.
[0086] 12. Система управления процессом по предшествующему аспекту, отличающаяся тем, что регулирование давления в приводном механизме включает:
генерирование сигналов тока на основе уставки давления и
преобразование сигналов тока в выходное давление, подаваемое на приводной механизм,
причем смещение позиционера представляет собой смещение тока/давления.
[0087] 13. Система управления процессом согласно аспекту 11 или аспекту 12, отличающаяся тем, что определение смещения позиционера на основе измеренного значения и уставки давления включает в себя накопление меры смещения измеренного значения относительно уставки давления.
[0088] 14. Система управления процессом по предшествующему аспекту, отличающаяся тем, что учет смещения позиционера включает в себя использование логики управления позиционера, которая учитывает смещение позиционера путем добавления меры смещения к смещению по умолчанию позиционера.
[0089] 15. Система управления процессом по предшествующему аспекту, отличающаяся тем, что позиционер содержит логику управления, реализующую по меньшей мере часть контура регулирования давления, и при этом мерой смещения является составляющая интегратора давления, используемая контуром регулирования давления.
[0090] 16. Компьютерное устройство, содержащее:
один или большее количество процессоров; и
одно или большее количество энергонезависимых запоминающих устройств, содержащих исполняемые компьютером команды, которые при выполнении одним или большим количеством процессоров заставляют компьютерное устройство:
определить значение давления, соответствующее конкретному состоянию приводного механизма,
регулировать давление в приводном механизме в соответствии с уставкой давления, основанной на значении давления, при котором обеспечивается поддержание определенного состояния приводного механизма,
получить измеренное значение, указывающее фактическое давление в приводном механизме, и
определить смещение позиционера на основе измеренного значения и уставки давления.
[0091] 17. Компьютерное устройство по предшествующему аспекту, отличающееся тем, что исполняемые компьютером команды также побуждают компьютерное устройство управлять приводным механизмом для выполнения одной или большего количества функций управления процессом, причем указанное управление приводным механизмом для выполнения одной или большего количества функций управления процессом включает выполнение логики управления, которая учитывает определенное смещение позиционера.
[0092] 18. Компьютерное устройство по предшествующему аспекту, отличающееся тем, что логика управления учитывает смещение позиционера путем добавления смещения позиционера к смещению по умолчанию позиционера в контуре управления, реализованном в логике управления.
[0093] 19. Компьютерное устройство по любому из аспектов 16-18, отличающееся тем, что приводной механизм представляет собой поршень клапана аварийного отключения, и тем, что значение давления соответствует останову поршня с упором.
[0094] 20. Компьютерное устройство по любому из аспектов 16-19, отличающееся тем, что приводной механизм приводит в движение клапан, выполненный с возможностью предотвращения помпажа в компрессоре.
Реферат
Способ калибровки позиционера включает определение значения давления, соответствующего определенному состоянию приводного механизма, управляемого позиционером и регулирующего давление в приводном механизме в соответствии с уставкой давления, основанной на значении давления, при котором обеспечивается поддержание определенного состояния приводного механизма. Способ дополнительно включает получение измеренного значения, указывающего фактическое давление в приводном механизме, и определение смещения позиционера на основе измеренного значения и уставки давления. 3 н. и 17 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и устройство для управления регулирующим клапаном посредством цепи управления, а также для выявления неисправностей в этой цепи
Оценка параметров управления технологическим процессом в заданных сегментах перемещения
Способ диагностики обнаружения отказа компонента регулирующего клапана
Комментарии