Способ диагностики обнаружения отказа компонента регулирующего клапана - RU2493467C2
Код документа: RU2493467C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к выполнению диагностики и технического обслуживания на технологическом участке и, более конкретно, к обеспечению диагностических возможностей в пределах технологического участка способом, который уменьшает или предотвращает отказы регулирующего клапана в пределах технологического участка.
Уровень техники
Отказ регулирующего клапана в производственном процессе почти всегда воздействует на работу технологического участка. Как правило, отказы регулирующего клапана могут влиять на реакцию регулирующего клапана на управляющие сигналы. В частности, регулирующий клапан может стать менее реагирующим или медленным в отношении управляющего сигнала, что может привести к ухудшению качества управления, что вызывает изменение параметров процесса, которое неблагоприятно для операторов технологического участка или, хуже того, может привести к опасной ситуации. Таким образом, раннее обнаружение ухудшения работы регулирующего клапана или его износа может позволить обеспечить точное плановое обслуживание регулирующего клапана, которое предотвратит нарушение работы технологического участка.
Ухудшение рабочих характеристик регулирующего клапана может произойти по ряду причин. Обычно основным фактором является износ компонентов. Однако износ частей обычно обнаруживается лишь после ухудшения работы регулирующего клапана в такой степени, когда регулирующий клапан уже работает неисправно из-за, например, отказа его компонента, т.е. когда может быть слишком поздно выполнять профилактическое обслуживание. Одним из способов профилактического обслуживания является периодический физический осмотр компонентов регулирующего клапана основе. Однако этот вариант является дорогостоящим, поскольку требует, чтобы контур управления технологическим процессом, в котором использован указанный регулирующий клапан, был остановлен, и/или чтобы регулирующий клапан был снят и разобран для осмотра.
Раскрытие изобретения
В соответствии по меньшей мере с одним раскрытым примером, заявленные способ и система идентифицируют ошибки и/или износ компонентов в технологическом регулирующем клапане. В некоторых вариантах реализации, заявленные способ и система обнаруживают износ и/или ошибки пружин приводов, пневматических трубок и сильфонных уплотнений.
В одном варианте реализации износ пружин привода или ошибка пневматического регулирующего клапана могут быть обнаружены при отслеживании давления привода и перемещения штока привода.
Еще в одном варианте реализации ухудшение работы сильфона или ошибка регулирующего клапана могут быть обнаружены при отслеживании давления в сильфонной камере и перемещения клапана.
Еще в одном варианте реализации может быть идентифицирован источник протечки привода. Еще в одном варианте реализации может быть обнаружена протечка в манометровых трубках или в диафрагме.
Краткое описание чертежей
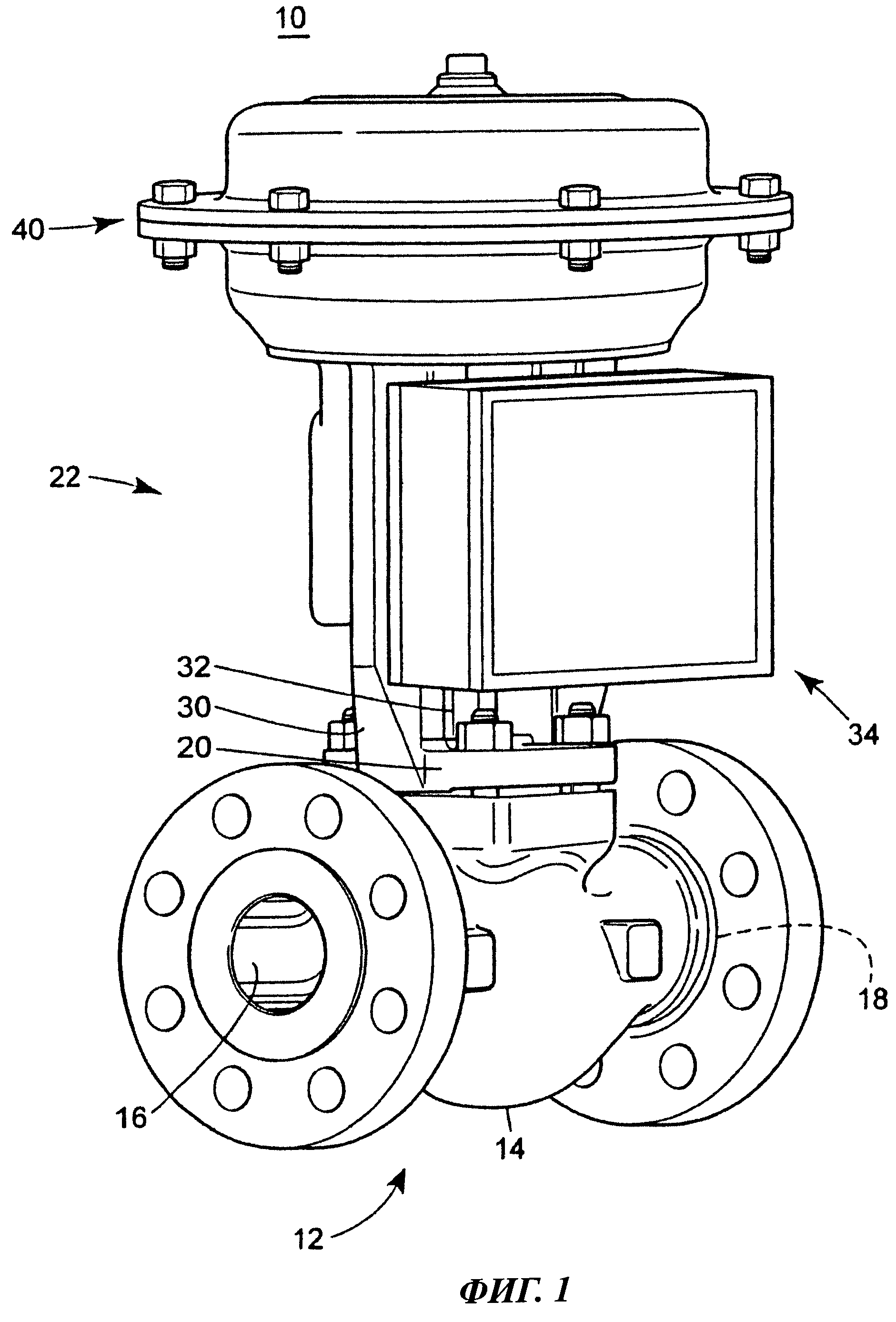
На фиг.1 показан регулирующий клапан.
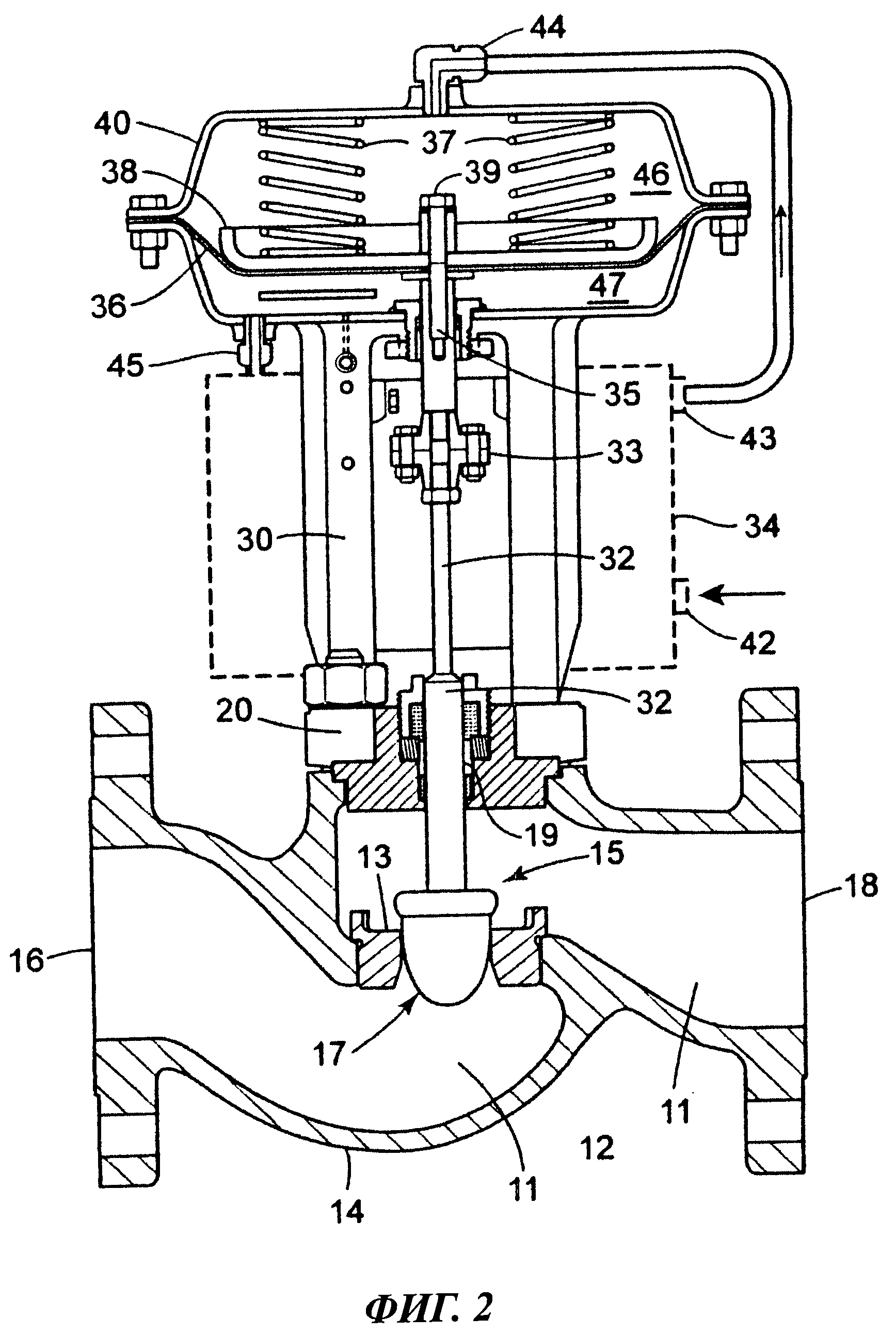
На фиг.2 показано поперечное сечение регулирующего клапана.
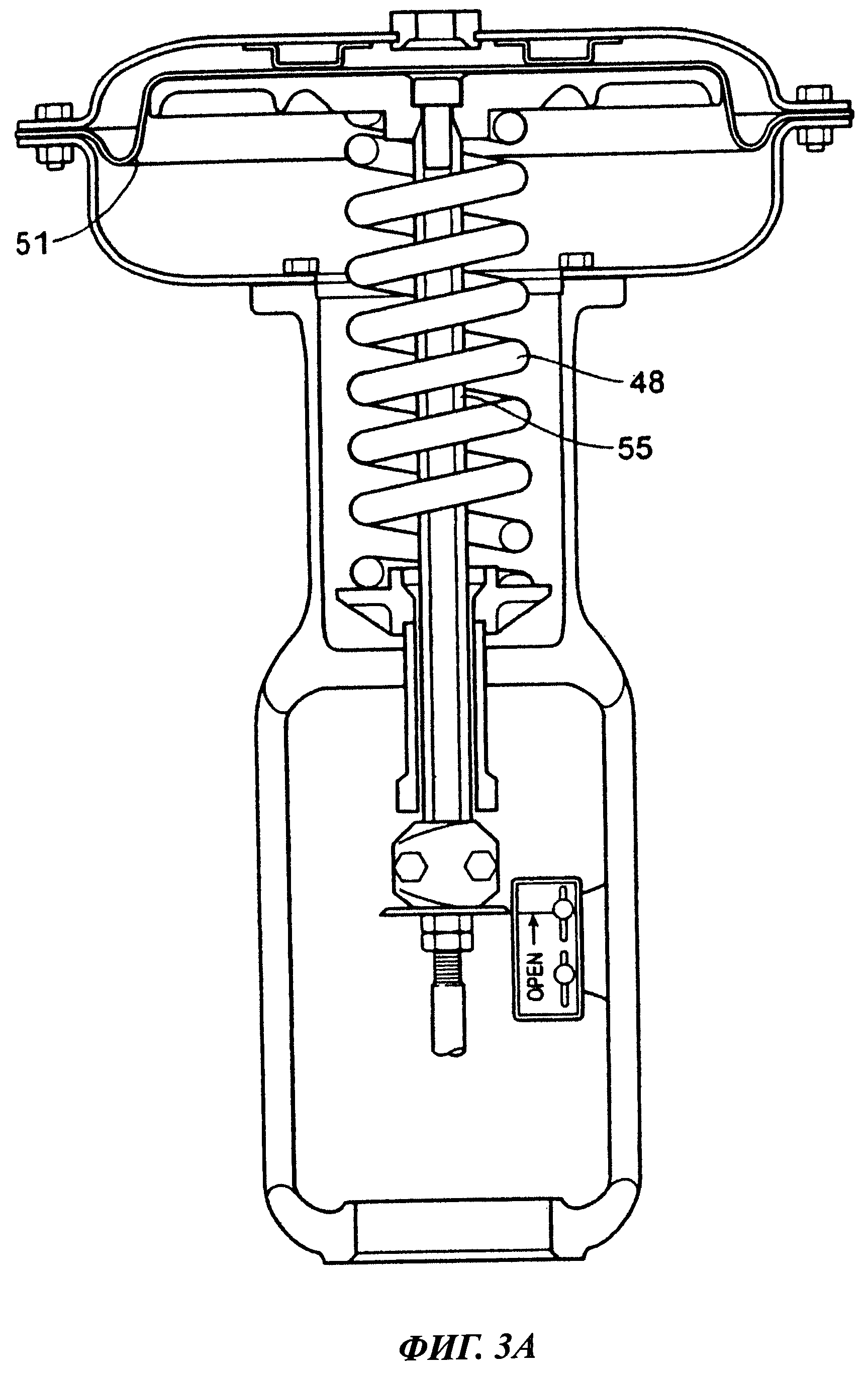
На фиг.3А показана конструкция клапана прямого действия.
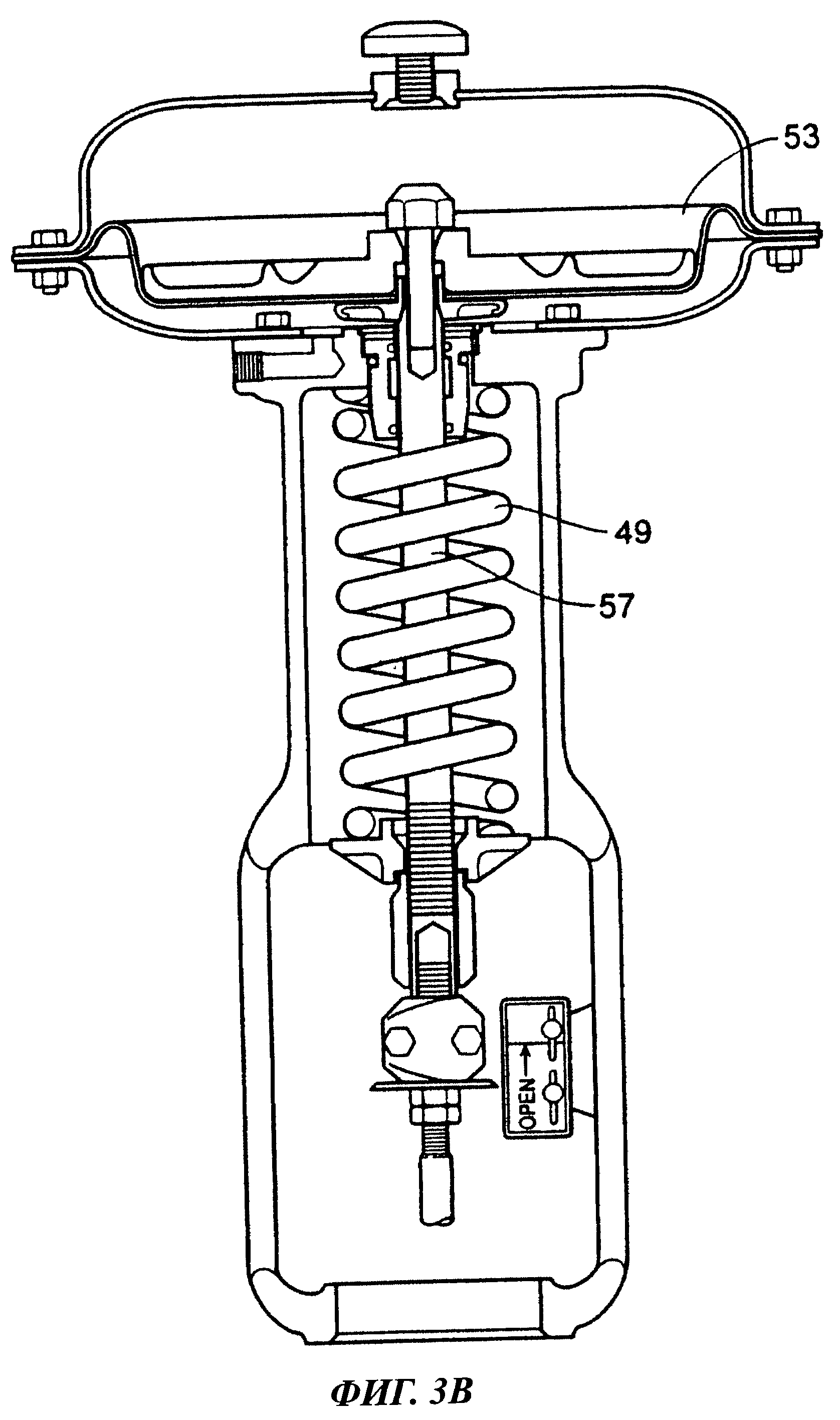
На фиг.3В показана конструкция клапана обратного действия.
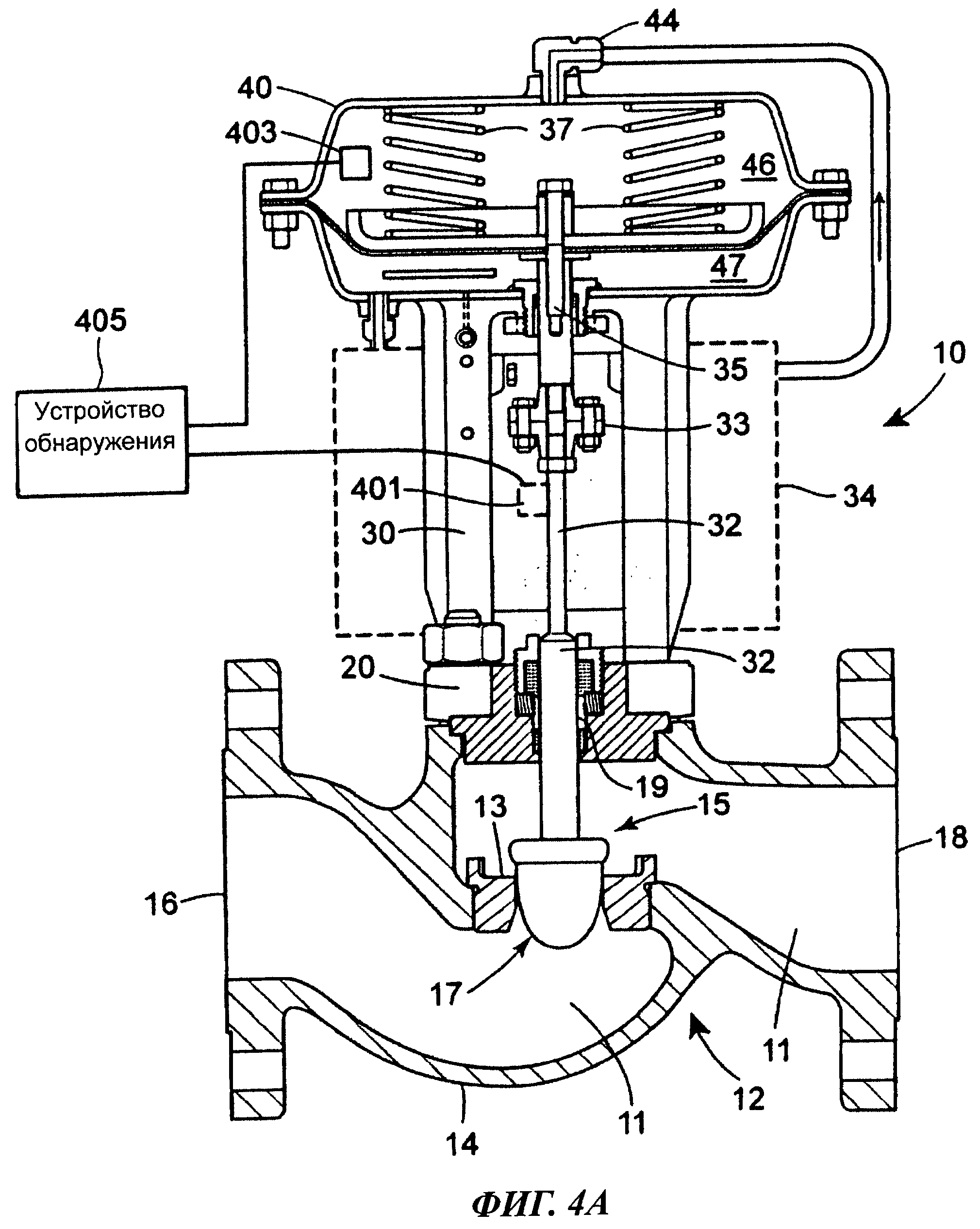
На фиг.4А показан регулирующий клапан, сформированный для определения износа пружин, согласно одному из вариантов реализации.
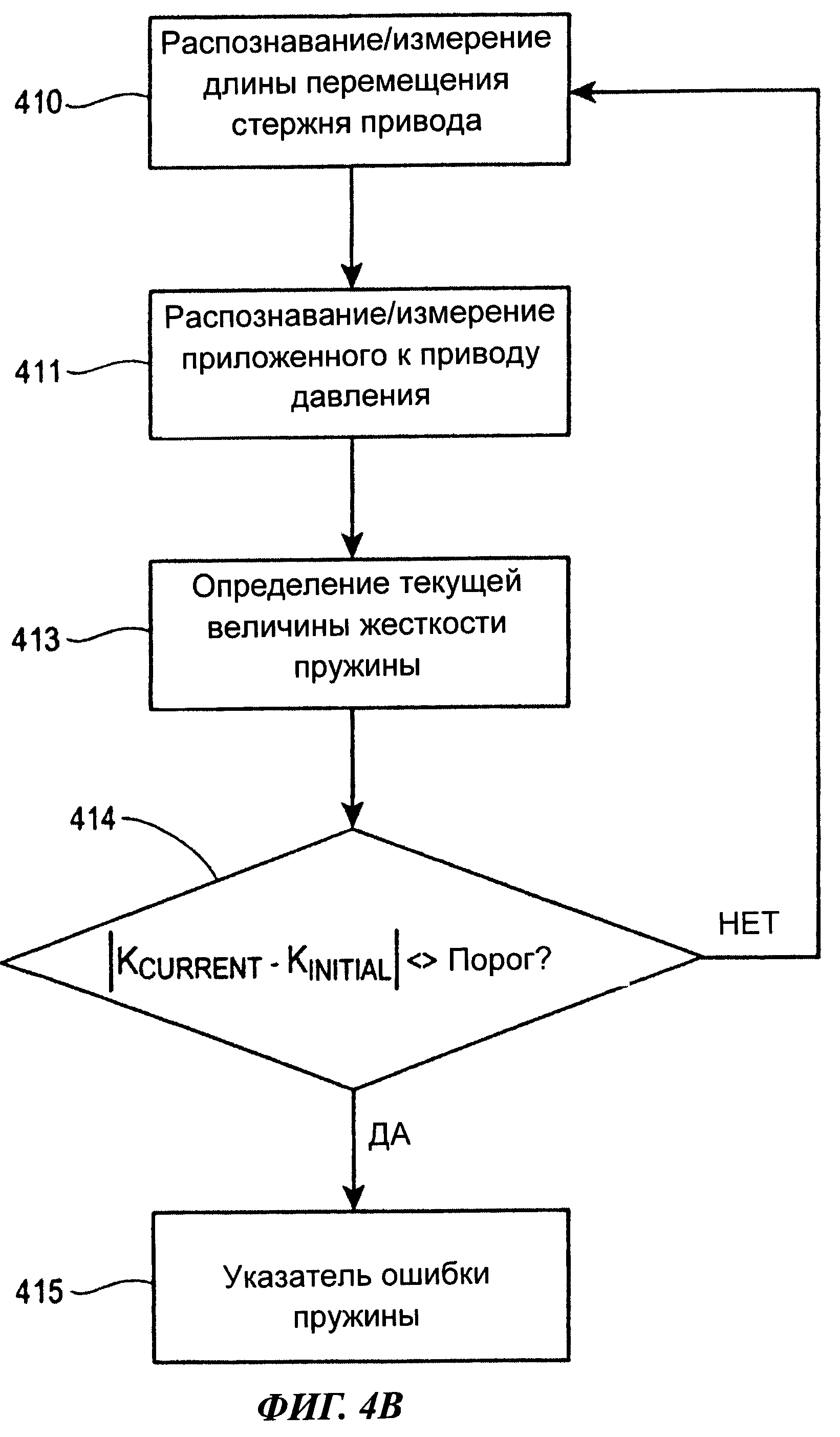
Фиг.4В иллюстрирует процесс обнаружения износа пружин согласно одному из вариантов реализации.
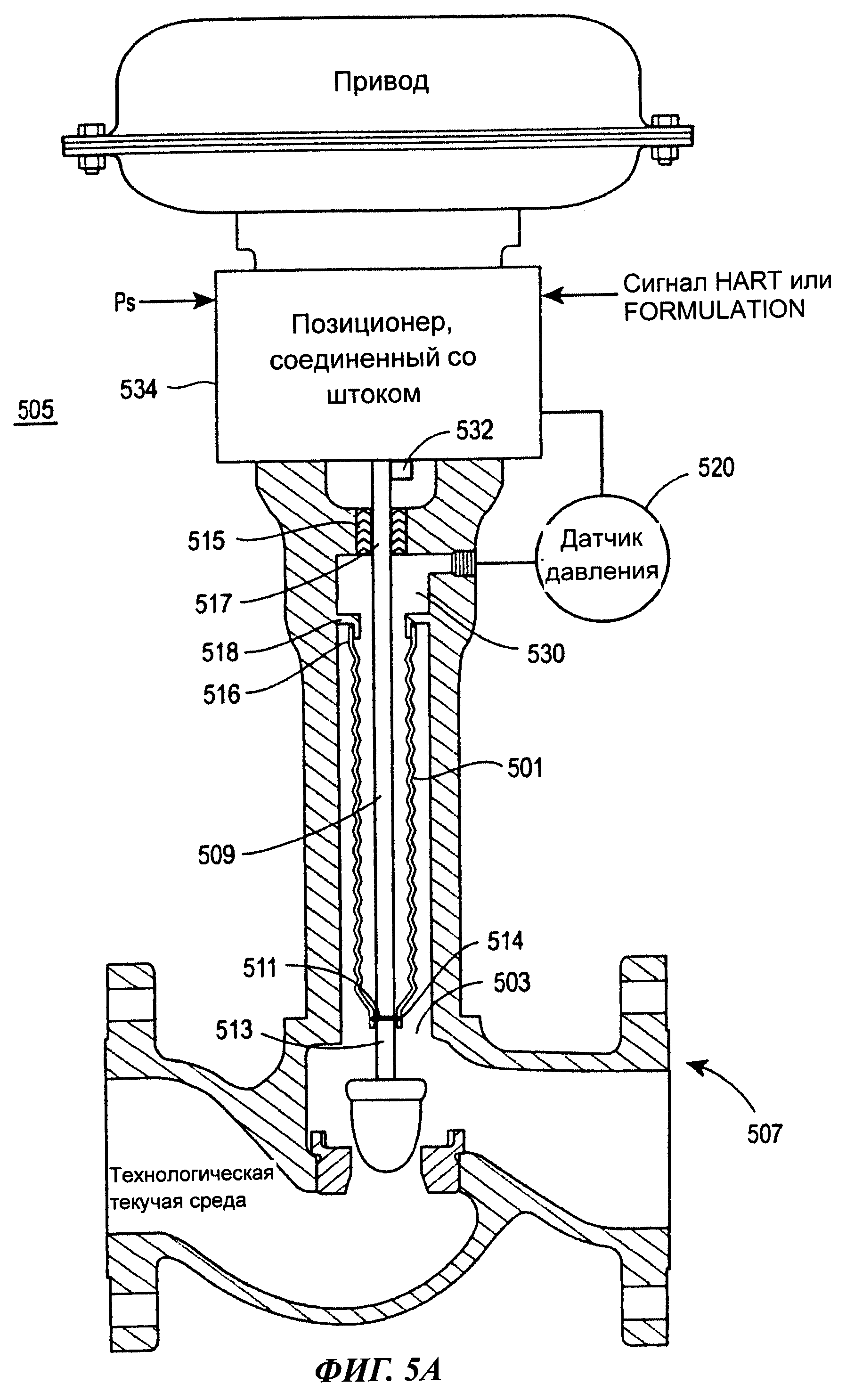
На фиг.5А показано сильфонное уплотнение, установленное в регулирующий клапан.
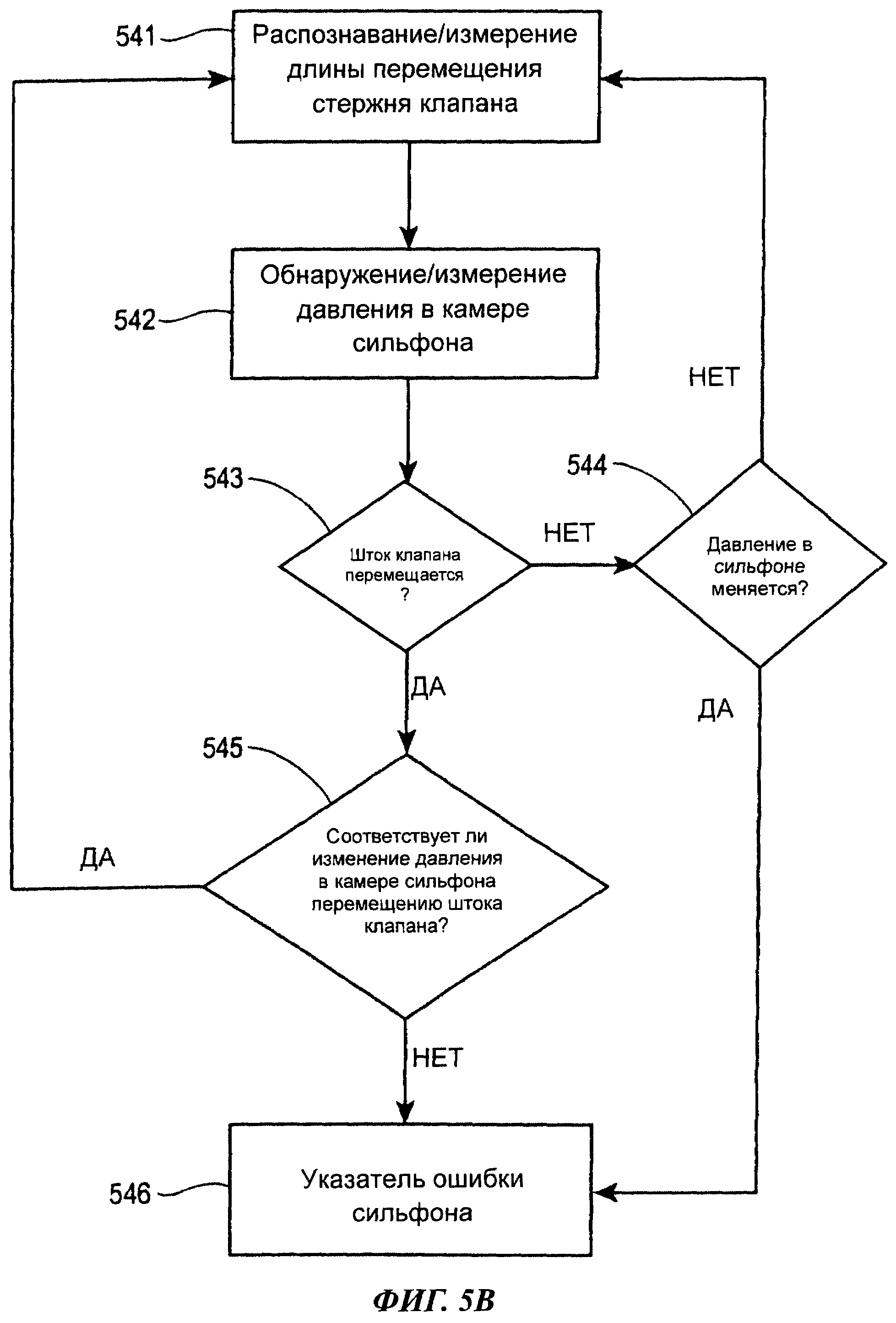
Фиг.5В иллюстрирует процесс обнаружения отказа сильфона согласно одному из вариантов реализации.
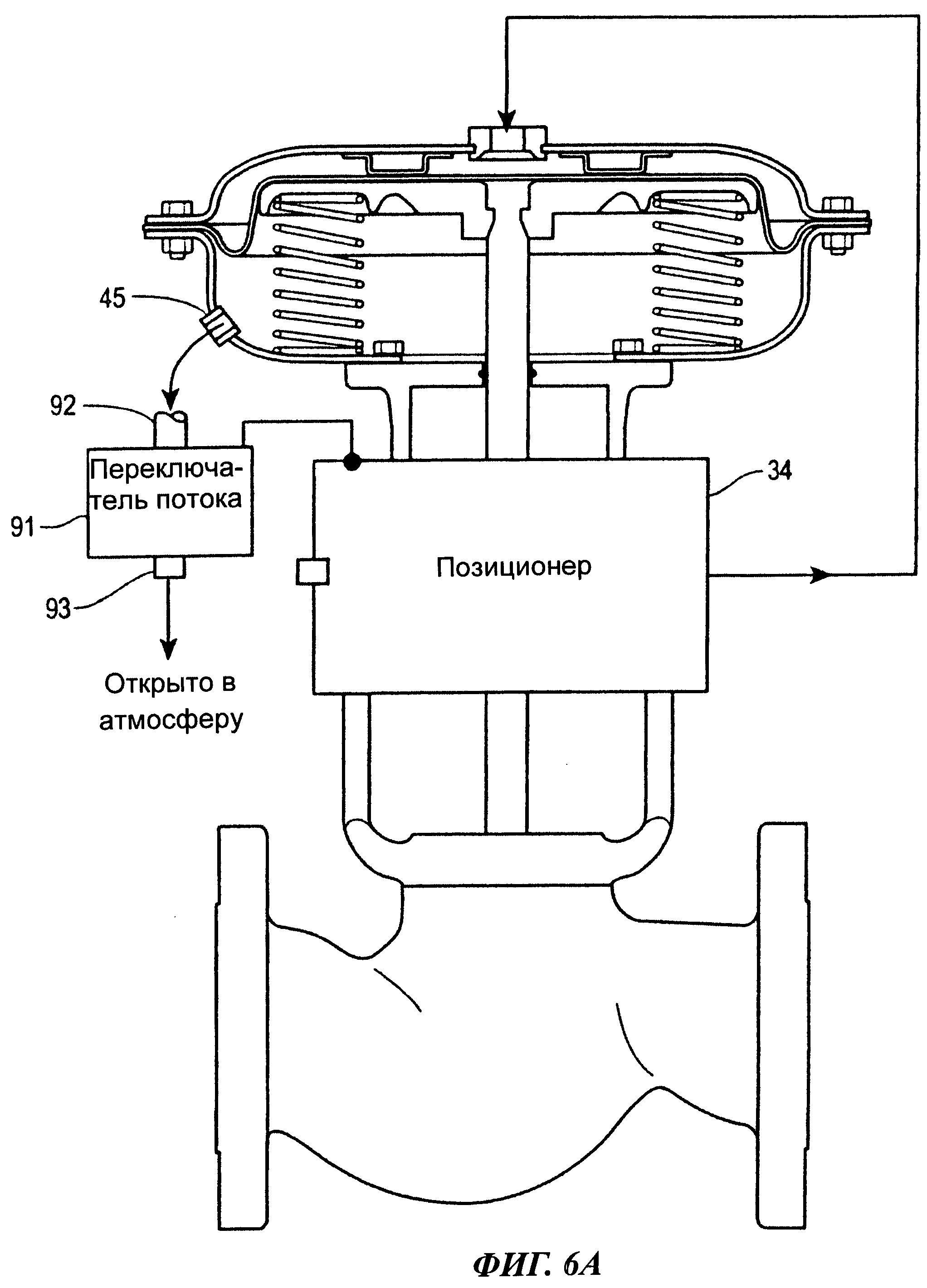
На фиг.6А показан регулирующий клапан, выполненный с возможностью идентификации протечки в пневматическом приводе, согласно одному из вариантов реализации.
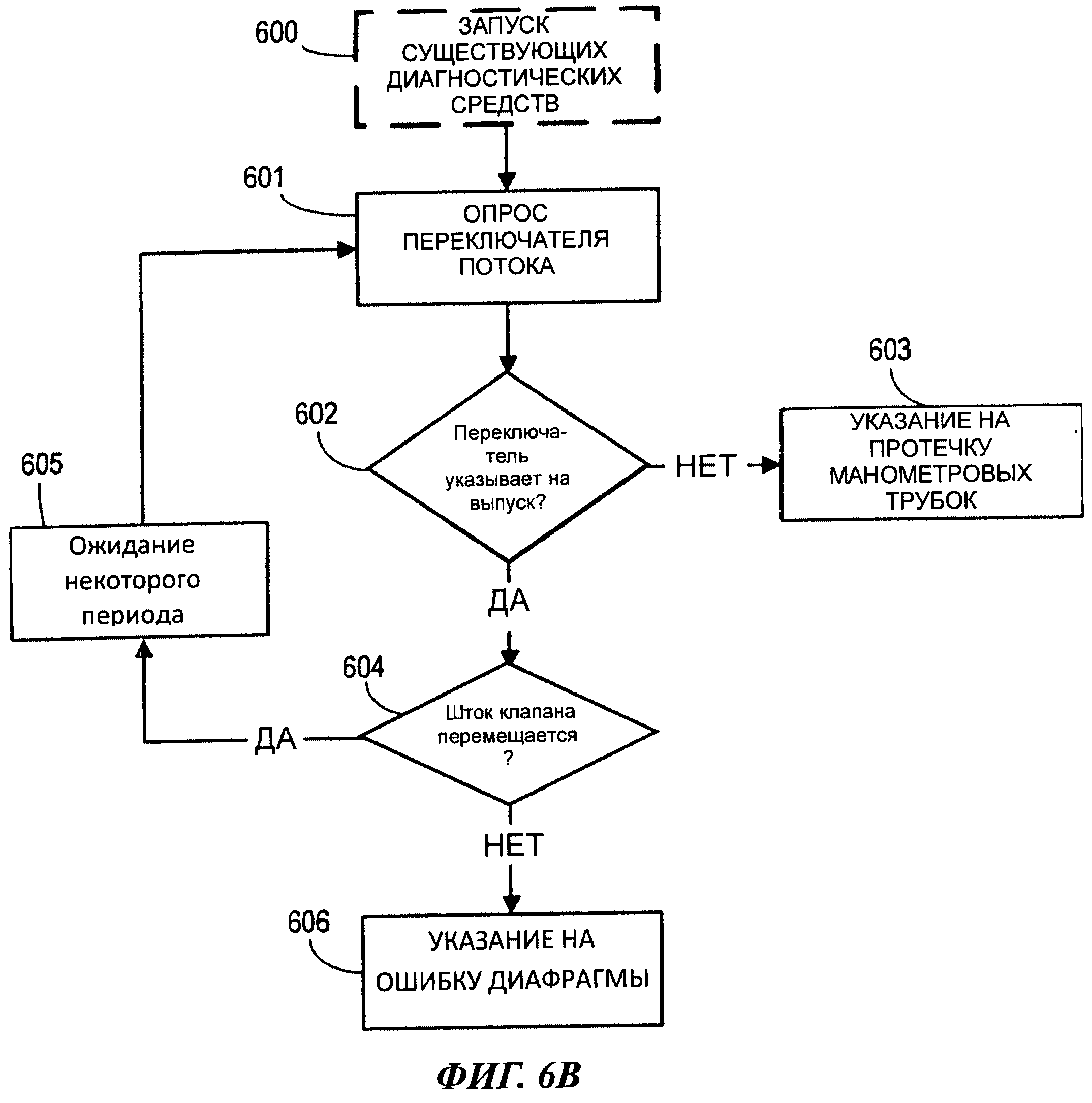
Фиг.6В иллюстрирует процесс для идентификации компонента, вызывающего протечку привода, согласно одному из вариантов реализации.
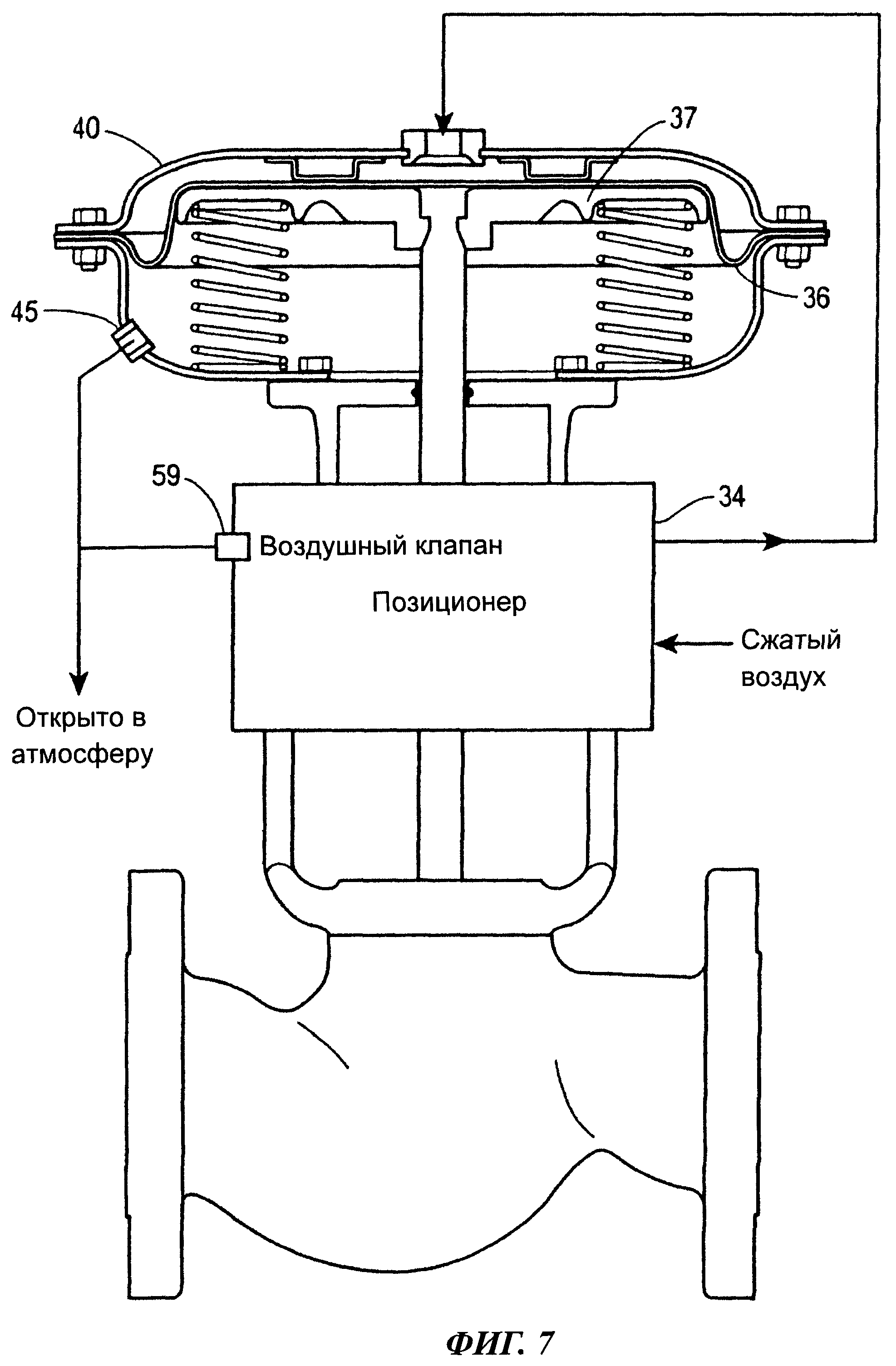
На фиг.7 показана конструкция пневматического привода, в котором воздушный клапан позиционера сообщается с воздушным клапаном привода.
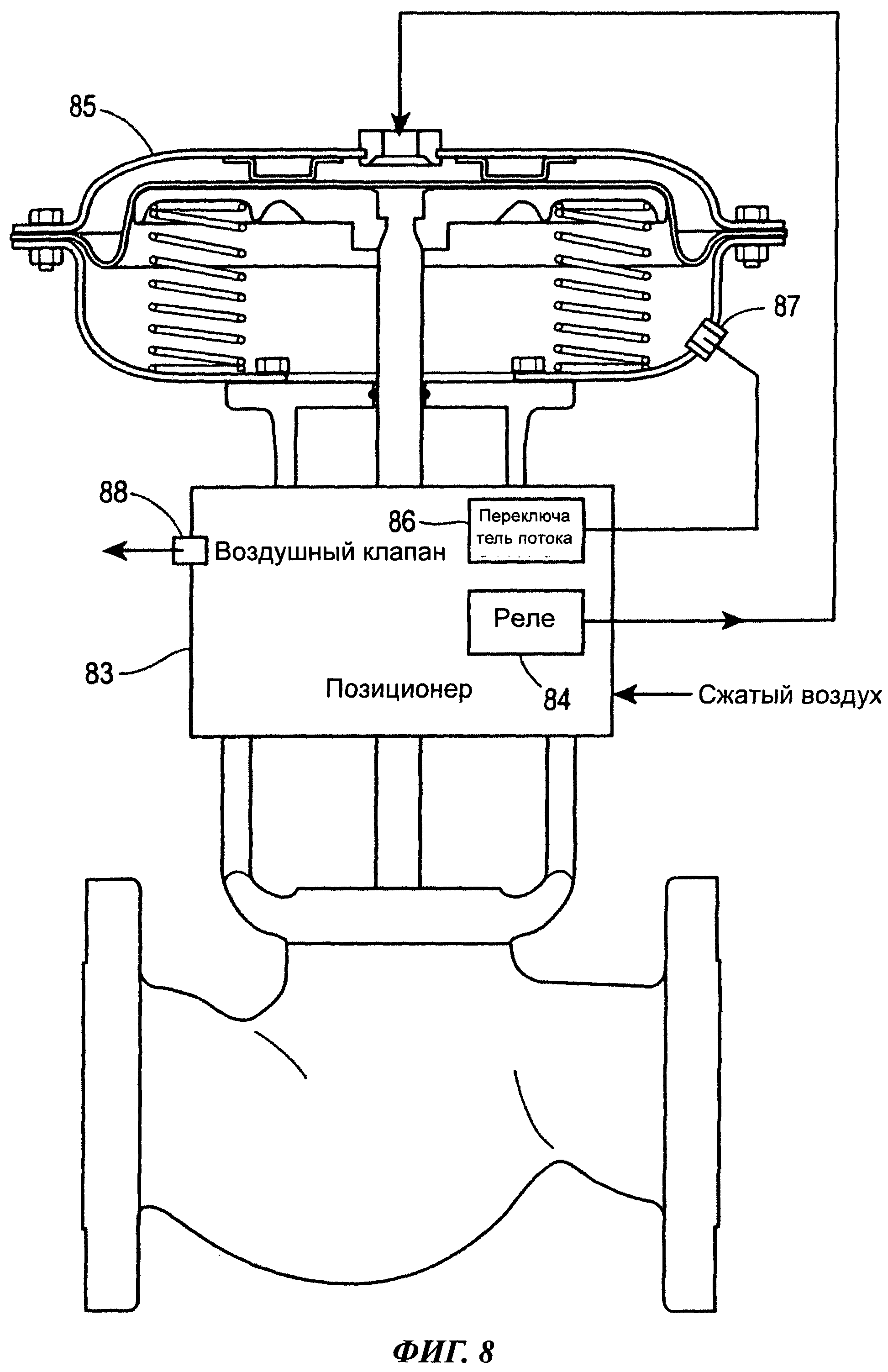
На фиг.8 показана система для обнаружения протечки, использующая модифицированный позиционер двойного действия, согласно одному из вариантов реализации.
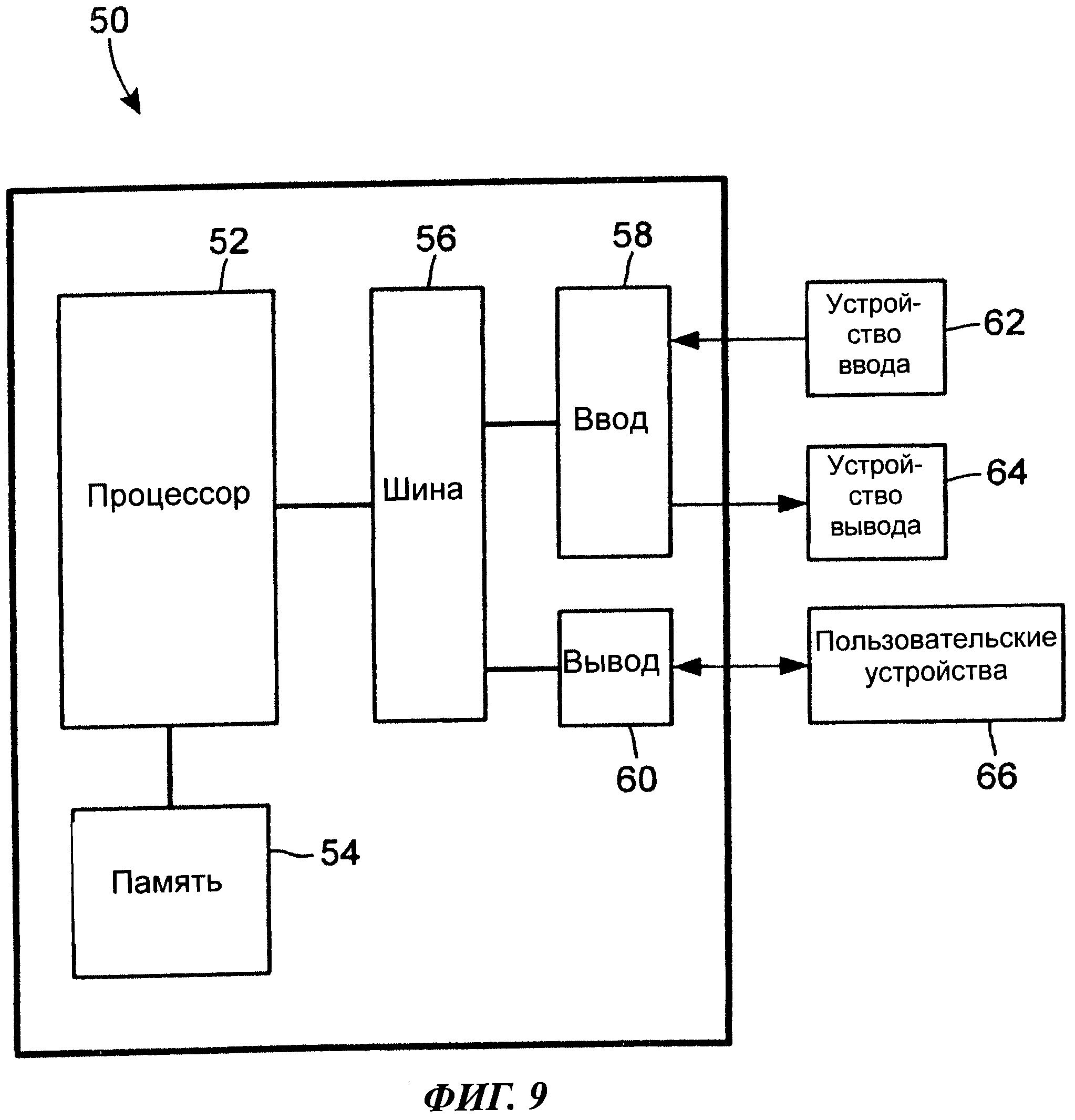
Фиг.9 иллюстрирует вычислительное устройство, которое может быть использовано для реализации алгоритма обнаружения.
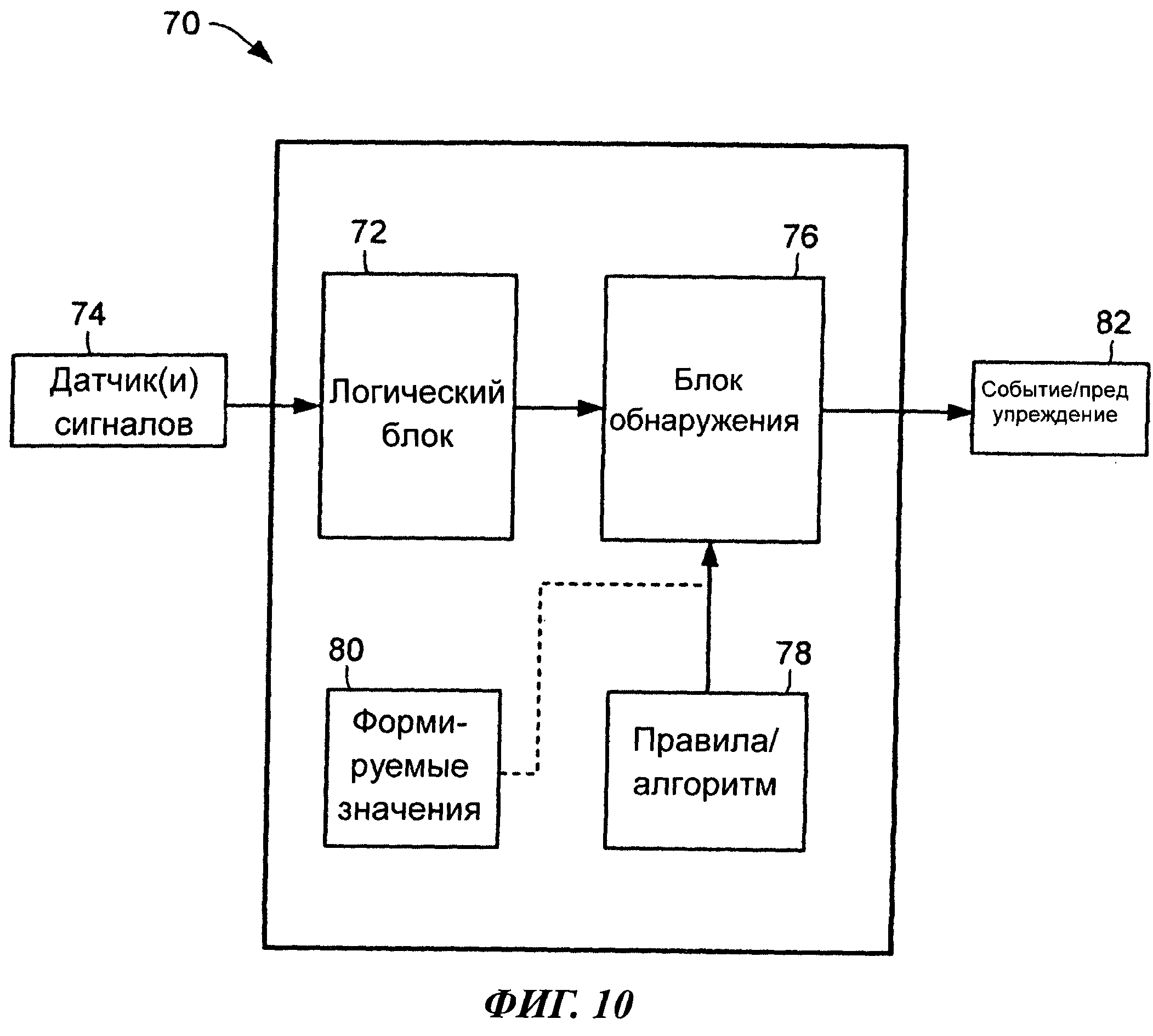
Фиг.10 иллюстрирует модуль обнаружения согласно одному из вариантов. реализации.
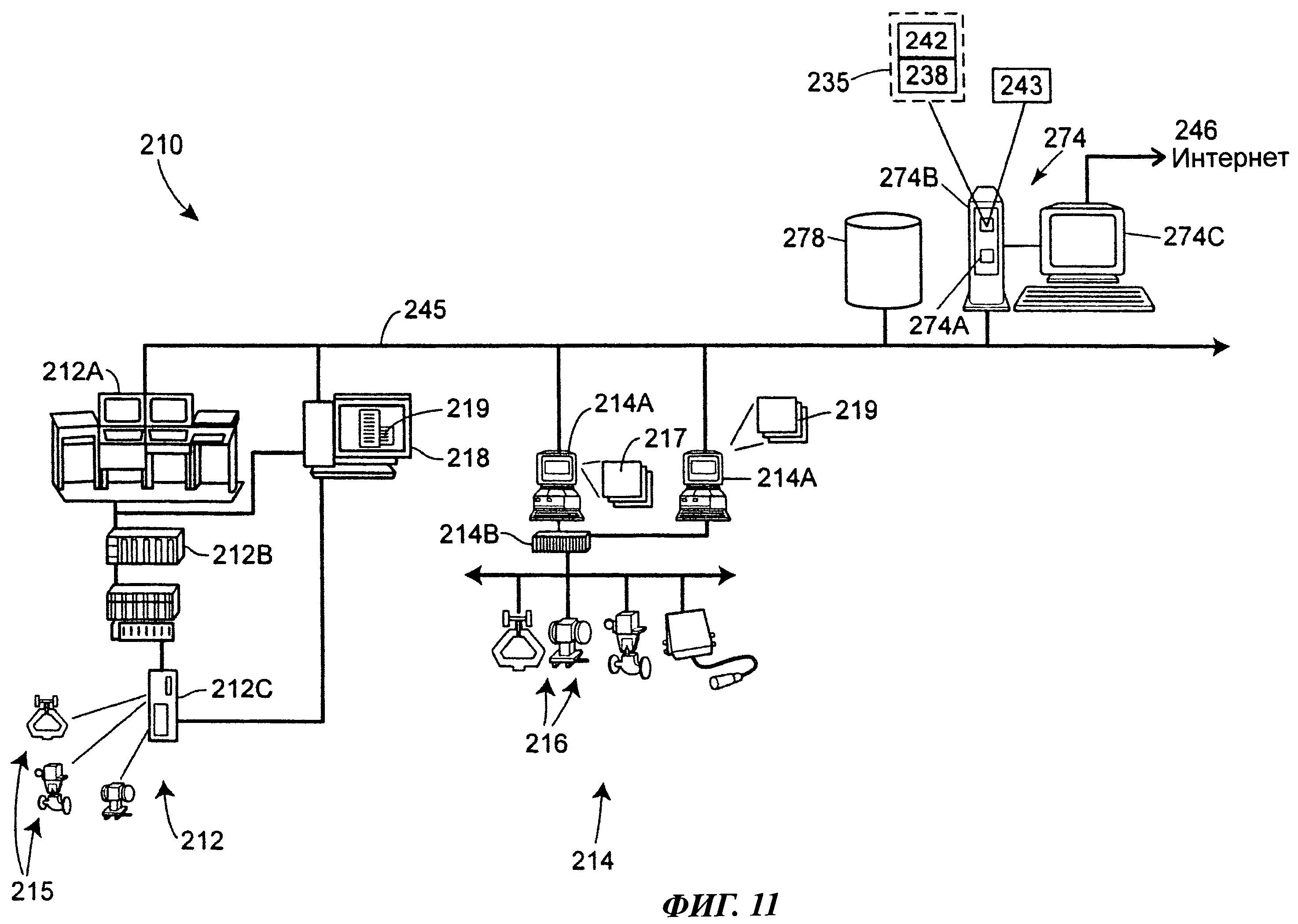
На фиг.11 показана автоматизированная система управления технологическими процессами на технологическом участке, в которой могут быть реализованы по меньшей мере один модуль обнаружения и регулирующие клапаны.
Осуществление изобретения
На фиг.1 показан узел 10 регулирующего клапана в сборе, который может быть использован в автоматизированной системе управления технологическими процессами, например, на технологическом участке. Узел 10 содержит клапан 12, привод 22 и инструмент регулирующего клапана или позиционер 34. Клапан 12 содержит корпус 14 клапана, впускное отверстие 16, выпускное отверстие 18, а привод 22 содержит крышку 20 клапана и корпус 40 пневматической диафрагмы. Шток 32 клапана может проходить через крышку 20 и может быть использован для управления клапаном 12. Хомут 30 может быть соединен с крышкой 20 или снабжен ею. Хотя, как показано на фиг.1, хомут 30 может быть соединен с крышкой 20, в других вариантах реализации хомут 30 может быть установлен на другую часть корпуса 14 клапана. Хомут 30 может быть использован для соединения корпуса 40 пневматической диафрагмы с корпусом 14 клапана. Шток 32 клапана, который может формировать часть узла 15 штока клапана в сборе, описанного далее, может быть выполнен с возможностью передачи усилия от корпуса 40 к клапану 12, чтобы таким образом управлять работой клапана 12.
Пневматический позиционер 34 может быть соединен с хомутом 30. Позиционер 34 может быть использован для регулирования приводом 22. Как правило, позиционеры, такие как позиционер 34, могут быть электропневматическими и могут быть использованы в контурах управления процессом для управления узлом 10 заданным способом. Таким образом, позиционер 34 может управляться принятым входным электронным сигналом, преобразованным на уровень давления паров (преобразование электрического тока в давление) (компоненты не показаны) для преобразования входного электронного сигнала в пневматический выходной сигнал, который может привести в действие привод 22. Сигнал давления на выходе может быть применен непосредственно к корпусу пневматической диафрагмы, который в свою очередь передает пневматический сигнал клапану для управления расходом пропорционально электронному входному сигналу.
На фиг.2 представлено поперечное сечение узла 10, показанного на фиг.1. Следует отметить, что одинаковые элементы обозначены одинаковыми позиционными номерами. На фиг.2 показан корпус 14 клапана, задающий впускное отверстие 16, выпускное отверстие 18 и канал 11, связывающий впускное отверстие 16 с выпускным отверстием 18. Седло 13 клапана может быть расположено внутри корпуса 14, через который проходит канал 11. Узел 15 штока клапана в сборе может состоять из затвора 17 клапана, расположенного в канале и выполненного с возможностью перемещения относительно седла 13, и таким образом управляющего потоком текучей среды через корпус 14. Узел 15 дополнительно содержит шток 32 клапана, соединенный с затвором 17 и проходящий через отверстие 19 (например, отверстие в корпусе клапана) в крышке 20. При подъеме узла 15 для открытия отверстия между затвором 17 и седлом 13 поток текучей среды через канал 11 увеличивается. При опускании узла 15 указанное отверстие закрывается, и поток текучей среды уменьшается, пока затвор 17 полностью не будет прижат к седлу 13 (как показано на фиг.2), и, таким образом, поток текучей среды через канал 11 прекращается.
Узел 15 может быть соединен с приводом 22 для подъема и опускания узла 15. Привод 22 может содержать корпус 40 диафрагмы, в котором размещена диафрагма 36, соединенная со стержнем 35 привода. Диафрагма 36 может быть смещена совокупностью (т.е. одной или более) пружин 37 привода. Хотя в варианте реализации, показанном на фиг.2, диафрагма 36 может быть соединена со стержнем 35 посредством диска 38 и болта 39, также могут быть использованы и другие известные соединительные средства. Как показано на фиг.2, шток 32 клапана может быть соединен со стержнем 35 соединителем 33 штока клапана. Приводом 22 можно управлять для подъема или опускания стержня 35, и, следовательно, для подъема или опускания узла 15 штока клапана в сборе. Корпус 40 диафрагмы привода 22 может быть поддержан и расположен над корпусом 12 посредством хомута 30.
Привод 22 может быть пневматическим приводом, управляемым позиционер 34. Позиционер 34 может иметь впускное отверстие 42 источника давления текучей среды, которое принимает сжатый газ от источника текучей среды (не показан). Позиционер 34 может иметь выпускное отверстие 43, которое сообщается с впускным отверстием 44 в корпусе диафрагмы привода 22. Корпус диафрагмы привода может иметь выпускной воздушный клапан 45 для вентиляции внутренней полости корпуса 40, находящейся под нормальным давлением. Хотя в варианте реализации, показанном на фиг.2, выпускное отверстие воздушного клапана 45 может быть соединено с позиционером 34, также может быть реализован случай, когда воздушный клапан 45 открыт для окружающей газовой среды. Позиционер 34 в целом может функционировать с возможностью управления количеством и длительностью применения газа в отношении корпуса 40 от источника давления, такого как источник сжатого воздуха (не показан). При подаче газа во впускное отверстие 44 привода давление в камере привода, например, в камере 46, воздействует на стержень 35 с силой, которая пропорциональна приложенному давлению и эффективной площади диафрагмы 36. Таким образом, при смещении диафрагмы 36 объем нижней камеры 47 может выпускать или принимать текучую среду через выпускное отверстие 45.
Хотя на фиг.2 показан пневматический привод согласно одному из вариантов реализации, использующий пружины 37, следует отметить, что в некоторых пневматических приводах может быть использована лишь одна пружина. Такие варианты реализации показаны на фиг.3А и 3В. На фиг.3А и 3В показано, что для смещения диафрагмы 51 и 53 использована одиночная пружина 48 и 49, соответственно. На фиг.3А показана конструкция прямого действия, в которой пружина 48 смещает стержень 55 привода вниз для закрытия клапана конструкции, тогда как на фиг.3В показана конструкция обратного действия, в которой пружина 49 смещает стержень 57 привода вниз для открытия клапана конструкции.
Обнаружение неисправной работы регулирующего клапана
Описанная здесь система помогает в определении причины ухудшения рабочих характеристик клапана благодаря идентификации изношенных компонентов регулирующего клапана. В частности, различные показания датчика могут быть использованы в описанных здесь алгоритмах для определения и идентификации компонентов регулирующего клапана, которые могут быть в плохом состоянии, или которые могут действовать за пределами расчетного диапазона рабочих характеристик. Таким образом, система обеспечивает раннее обнаружение износа компонента до наступления критического сбоя регулирующего клапана.
В одном варианте реализации система может отслеживать ухудшение работы регулирующего клапана из-за износа компонентов, таких как пружины привода, пневматические трубки, и/или нарушения герметизации. В регулирующем клапане реакция привода может быть ухудшена из-за износа пружин привода, которые используются для смещения привода. При износе пружин отклик клапана при его переключении в рабочее состояние (открытое или закрытое) может задерживаться. На реакцию привода могут дополнительно влиять утечки в пневматических каналах (например, в трубках, ведущих к пневматическим выпускным и впускным отверстиям и от них), а также по причине частичного или полного отказа диафрагмы привода. Дополнительно, реакция регулирующего клапана может ухудшиться из-за износа сильфонных уплотнений, которые используются для изоляции технологической среды регулирующего клапана от внешней атмосферы (например, среды, окружающей регулирующий клапан). Система, описанная здесь, может быть использована для обнаружения или предсказания износа по меньшей мере одного из описанных компонентов.
Обнаружение ошибки или износа пружины привода
Отказ пружины представляет собой такой вид отказа, который может вызвать снижение быстродействия (т.е. замедление) регулирующего клапана. Износ одной пружины в приводах, таких как показанных на фиг.3А и 3В, может вызвать мгновенный отказ. В приводе со многими пружинами отказ одной пружины не может вызвать немедленный отказ всего регулирующего клапана или потерю управления. Однако отказ даже одной пружины в приводе со многими пружинами может привести к неравномерной толчку привода, что может ограничить рабочий диапазон клапана или уменьшить прижим к седлу и, таким образом, увеличить протечку седла внутри клапана. Кроме того, отказ одной пружины может указать на возможность скорого выхода из строя других пружин.
В общем, износ пружины может произойти по разным причинам, таким как эрозия или окисление пружин, или конструкционный/механический пробой, а также усталость материала. Любая из этих причин может вызвать уменьшение упругости пружин помимо их других физических параметров.
Система обнаружения износа пружин привода, описанная здесь, может быть осуществлена для прогнозирования или обнаружения износа пружины или ее отказа так, что могут быть приняты профилактические меры, которые сокращают затраты на обслуживание и дорогостоящие простои в случае перерыва в работе технологического участка. Система обнаружения износа пружины может быть осуществлена в существующей автоматизированной системе управления технологическими процессами или внедрена в качестве независимо функционирующего вычислительного блока. В общем, система обнаружения износа пружины может быть осуществлена в форме аппаратных средств или программного обеспечения, исполняемого на вычислительном устройстве.
В одном варианте реализации для обнаружения износа пружины может быть использованы вычисление и отслеживание текущего значения жесткости пружины привода. В этом варианте реализации жесткость пружины может быть вычислена и сравнена с исходным или назначенным значением жесткости пружины. Износ или отказ пружины могут быть обнаружены, если отклонение расчетной жесткости пружины от исходного или назначенного значения выходит из заданного предела. В другом варианте реализации для вычисления значения жесткости пружины могут быть отслежены и измерены давление привода и перемещение клапана. Для вычисления величины жесткости пружины может быть использована следующая формула:
ΔРА=ΔTKa,
где ΔT - длина перемещения клапана, ΔР - изменение приложенного давления к приводу, А - эффективная площадь для диафрагмы привода и Ка - жесткость пружины.
На фиг.4А показан регулирующий клапан согласно одному из вариантов реализации, который может быть использован для определения износа пружины в приводе. Общие элементы, показанные на фиг.2 и фиг.4А, обозначены одинаковыми позиционными номерами. Как показано на фиг.4А, позиционный датчик 401 может предоставлять данные о положении, перемещении и/или ходе узла 10 регулирующего клапана в сборе. Перемещение клапана 12 может быть вызван перемещением стержня 35 привода. Как показано на фиг.2, стержень 35 привода может быть соединен со штоком 32 клапана, соединителем 33 штока клапана и затвором 17 клапана. Таким образом, измерение перемещения любого компонента из этой совокупности может быть указывающим на перемещение любого элемента из указанной совокупности компонентов.
Датчик 403 давления может предоставлять данные, указывающие на наличие давления, приложенного к верхней напорной камере 46.
Дополнительно, для приема измеренных данных по меньшей мере от одного из датчиков перемещения или давления 401 или 403, соответственно, может быть использовано устройство 405. После этого устройство 405 может осуществить алгоритм обнаружения и указания ошибки пружины, как дополнительно описано далее. Хотя устройство 405 на фиг.4А показано отдельно от позиционера 34, устройство 405 может быть выполнено в форме части позиционера 34. Это может иметь место, например, если позиционер 34 представляет собой цифровой позиционер, имеющий свой процессор и память.
Фиг.4В иллюстрирует процесс обнаружения износа пружины привода согласно одному из вариантов реализации. На этапе 410 может быть распознано перемещение клапана (например, перемещение стержня 35, соединителя 33 или штока 32). В одном варианте реализации положение клапана может измеряться на периодической основе, и перемещение может быть определено как разница между двумя измеренными положениями. На этапе 411 может быть распознано приложенное давление. В одном варианте реализации изменение приложенного давления может быть распознано периодическим осуществлением измерения приложенного давления и определения разности между двумя измеренными показаниями. В одном варианте реализации период измерения положения и приложенного давления может быть синхронизирован. Иными словами, как измерение положения, так и измерение приложенного давления, могут быть выполнены одновременно в один и тот же период.
На этапе 413 может быть определена текущая жесткость пружины привода. Например, в течение конкретного промежутка времени длина перемещения клапана может быть измерена одновременно с соответствующим изменением давления. В одном варианте реализации могут быть зарегистрированы первое положение клапана в первый момент времени и второе положение клапана во второй момент времени, при этом может быть вычислена разность между первым положением и вторым положением при перемещении клапана на длину ΔT. Во время перемещения клапана может произойти соответствующее изменение в приложенном давлении привода. Это изменение давления привода может быть измерено путем регистрации давления привода в первый момент времени, когда клапан находится в первом положении, и затем регистрацией давления привода во второй момент времени, когда клапан достигает второго положения. Разность двух измеренных значений давления затем может быть использована для вычисления изменения давления ΔР.
На этапе 414 разность между расчетным текущим значением коэффициента упругости пружины может быть сравнена с исходным значением коэффициента упругости пружины. Если разница между текущим и исходным значениями коэффициента упругости пружины превышает заданный порог, то на этапе 415 может быть сгенерировано указание об отказе пружины или износе пружины. Если разность между текущим и исходным значениями коэффициента упругости пружины не превышает заданный порог, то процесс может быть повторен. Исходное значение коэффициента упругости пружины может быть обеспечено заранее (например изготовителем), или для определения исходной жесткости пружины могут быть использованы этапы 410-413.
Указанный порог может быть установлен на уровне, заданном на основе срока службы пружины или нескольких пружин в приводе. Например, порог может быть установлен на уровне, указывающем, что пружина изношена настолько, что у нее остался ресурс использования, достаточный лишь для поддержки работы клапана до плановой замены и/или установки пружины (пружин).
В одном варианте реализации перемещение ΔТ клапана может быть вычислено только для одиночного непрерывного перемещения клапана в одном направлении. Иными словами, в этом варианте реализации перемещение клапана может быть измерено только как длина непрерывного перемещения клапана из первого положения во второе положение без изменения направления при перемещении между этими двумя положениями. В этом варианте реализации перемещение между конечными точками (например, в которых перемещение клапана ограничено физически) может быть не включено в перемещение ΔT клапана.
В одном варианте реализации привод может содержать несколько пружин, как показано на фиг.2. В этом случае жесткость пружины может представлять собой совокупную жесткость пружин для определения действия нескольких пружин. В этом варианте реализации отказ одиночной пружины может быть обнаружен соответственным заданием порога. В частности, в этом случае порог может быть задан на основе количества пружин и среднем вкладе каждой пружины в совокупную жесткость пружин. Например, порог может быть задан с учетом соответствия разницы в совокупных жесткостях пружин при удалении одной из пружин или нескольких пружин (например, в случае полного отказа). В другом примере установленный порог может отражать разность в совокупной жесткости пружин, если характеристики по меньшей мере одна пружина изношена до минимально допустимого уровня функциональности, но не до полного отказа любой пружины. В одном варианте реализации порог может быть установлен на основе количества пружин, необходимого для преодоления сил трения и гистерезиса клапана во время работы. В этом варианте реализации порог может быть установлен так, что система может указать проблемную пружину прежде, чем рабочие характеристики клапана будут ухудшены или окажутся под угрозой ухудшения.
В одном варианте реализации порог может быть установлен на основе следующего уравнения:
, где n - общее количество пружин из ряда пружин, для которых существует ряд жесткостей, обозначенных как K1…Kn. При этом K1 представляет жесткость первой пружины из указанного ряда пружин.
Обнаружение износа сильфонных уплотнений
На фиг.5А показан регулирующий клапан, использующий сильфонное уплотнение. Сильфоны 501 могут быть использованы в качестве барьеров для изоляции окружающей технологический участок атмосферы 505 от управляющей технологическим процессом текучей среды 503. Например, сильфоны 501 могут быть необходимыми при работе со вредными или токсичными технологическими процессами, в которых требуется изоляция вредных химических веществ от окружающей технологический участок среды (например, см. инструкции Управления охраны труда (OSHA)).
Сильфон по существу представляет собой гибкое моноблочное разборное бесшовное устройство, которое имеет глубокие складки, сформированные из трубы с очень тонкими стенками и которое может быть металлическим. Гибкость складок сильфона по своему характеру может быть подобна гибкости винтовой намотке пружины сжатия. В применениях с регулирующим клапаном сильфон 501 может быть прикреплен к первой части 513 штока 509 клапана с использованием шайбы 511 сильфона, установленной в первом конце 514 сильфона. Второй конец 516 сильфона 501 может быть прикреплен к части 518 корпуса 14. Часть 518 корпуса клапана может быть частью крышки 20. Сильфон 501 изолирует регулирующую текучую среду в регулирующем клапане (например, в клапане 503) от окружающей атмосферы 505, которая является внешней по отношению к регулирующему клапану, а также обеспечивает возможность свободного перемещения штока 509 без большого трения. Диаметр и количество складок сильфона в общем могут быть выбраны с учетом возможности размещения между штоком клапана и камерой штока клапана, но могут быть изменены в зависимости от конфигурации и типа регулирующего клапана.
Сильфон 501 может быть разрушен непредсказуемым и катастрофическим образом из-за усталости материала (например, усталости металла) и/или коррозии. Ввиду потенциальной опасности отказа сильфона в регулирующем клапане в качестве резервной герметизирующей конструкции также быть предусмотрен уплотняющий элемент 515. Клапаны, содержащие герметичный сильфон, обычно имеют дополнительный уплотняющий или герметизирующий элемент 515, установленный на второй части штока 517 рядом с вершиной штока клапана. Вторая часть штока клапана может быть выполнена с возможностью перемещения в отверстии в корпусе клапана. Уплотнение 515 может действовать в качестве конечной защиты против протечки через шток 509 в атмосферу в случае разрыва сильфона 501.
Хотя уплотнение 515 обеспечивает дополнительный барьер безопасности между текучей средой процесса и внешней атмосферой, уплотнение 515 может затруднять обнаружение повреждения сильфонного уплотнения, пока фактическая протечка во внешнюю среду не станет значительной. Датчики давления обычно используются для генерации сигналов, указывающих поток и уровень. Например, цифровой позиционер может быть соединен с датчиком давления для обнаружения приложенного давления привода. Эти датчики давления могут быть использованы для обеспечения регулирующей обратной связи. Датчики давления дополнительно могут быть использованы в регулирующих клапанах для обнаружения низкого давления в соединениях привода или соединениях клапана. Однако, одно лишь это показание о снижении давления не может предоставить информацию, необходимую для различения факта протечки сильфона от действия таких факторов, как ход клапана или влияние температуры на газ, захваченный между сильфоном и уплотнением, который воздействует на перемещение регулирующего клапана.
На фиг.5А представлен регулирующий клапан 507, выполненный с возможностью обнаружения износа или отказа герметизации сильфона. В частности, на фиг.5А показан датчик 520 давления, который может определять давление текучей среды между уплотнением 515 и сильфоном 501, пространство между которыми формирует камеру 530. Второй датчик 532 может измерять перемещение клапана. В этом варианте реализации эти два датчика (т.е. датчик 520 давления в сильфонной камере и датчик 532 перемещения) могут передавать результаты измерений или данные в позиционер 534. Затем позиционер 534 может применить алгоритм (дополнительно описанный далее) для определения потенциального отказа сильфона. Следует отметить, что некоторые цифровые позиционеры могут быть уже выполнены с возможностью распознанвания перемещения клапана (т.е. длины, пройденной позиционером, или положения клапана в разные моменты времени), и, таким образом, в некоторых вариантах реализации, датчик 532 может быть встроен в позиционер 534.
Отказ сильфона может быть зарегистрирован при определении следующих условий.
1) Постоянное давление в камере 530, тогда как шток клапана передвигается или перемещается; или
2) Увеличение давления в камере 530 без перемещения штока клапана.
Эти два указанные выше условия обнаружения могут быть объяснены с использованием закона идеального газа:
PV=nRT
В этом случае Р может быть давлением в камере А, V может быть объемом камеры А, п может быть количеством молей газа в камере A, R может быть постоянной идеального газа, и Т может быть абсолютной температурой. В целом, пока сильфон 501 функционирует, и сильфонное уплотнение 511, соответственно, герметизирует камеру 530 от текучей среды процесса (например, текучей среды в секции 503 регулирующего клапана), объем в камере 530 должен зависеть только от перемещения клапана. Таким образом, если сильфон 509 и сильфонное уплотнение 511 исправны, давление и перемещение должны быть обратно пропорциональными. В частности, давление и перемещение должны быть обратно пропорциональными произведению nRT. Однако если сильфон 509 имеет протечки или разрывы, связь между давлением и объемом камеры 530 может быть искажена. Таким образом, упомянутые выше условия могут указывать на отношения между давлением и объемом камеры 530 после протечки или разрыва.
Фиг.5В иллюстрирует процесс или реализации алгоритма обнаружения отказа сильфонного уплотнения или самого сильфона, или уплотнения в регулирующем клапане согласно одному из вариантов реализации. На этапе 541 могут быть распознаны или измерены ход или перемещение штока клапана. В одном варианте реализации положение штока клапана может регистрироваться на периодической основе, и перемещение может быть определено на основе разности между двумя результатам измерения положения. На этапе 542 может быть измерено изменение давления в сильфонной камере. В одном варианте реализации изменение давления в сильфонной камере может распознаваться периодическими измерениями давления в камере и определениями разности между результатами двух измерений. В одном варианте реализации периоды измерений положения штока клапана и давления в сильфонной камере синхронизированы. Иными словами, как измерение положения, так и измерение приложенного давления, могут быть выполнены одновременно в течение общего периода времени.
На этапе 543 может быть определен факт перемещения штока клапана. Если перемещение штока клапана отсутствует, на этапе 544 может быть определен факт изменения давления в сильфонной камере. В одном варианте реализации изменение давления может быть определено в течение того же периода, в течение которого шток клапана распознан как неподвижный. Если на этапе 543 перемещение штока клапана отсутствует (т.е. шток клапана неподвижен), и также на этапе 544 зарегистрировано отсутствие изменений давления, то процесс может быть повторен с этапа 541. Если на этапе 543 шток клапана определен как неподвижный, и зарегистрировано изменение давления, то на этапе 546 генерируется указатель отказа сильфона.
Если на этапе 543 определено перемещение штока клапана, то на этапе 545 может быть определен факт соответствующего изменения давления в сильфонной камере. Если на этапе 545 определено соответствующее изменение давления в сильфонной камере, то процесс может быть повторен с этапа 541. Если соответствующее изменение давления в сильфонной камере на этапе 545 не обнаружено, то на этапе 546 генерируется указатель отказа сильфона. Как описано выше, определение на этапе 545 соответствующего изменения давления может включать определение, является ли длина перемещения клапана обратно пропорциональным изменению давления в сильфонной камере. На этапе 545 дополнительно может быть выполнено определение, является ли длина перемещения клапана обратно пропорциональной изменению давления в сильфонной камере посредством произведения nRT.
В одном варианте реализации может быть осуществлен дополнительный процесс следующим образом. Если на этапе 543 определено, что шток клапана не перемещается в течение нескольких циклов (например, в течение нескольких последовательных циклов, во время которых на этапе 543 не обнаружено перемещение штока), то на этапе 544 определение изменения давления в сильфонной камере может осуществляться в течение более длинного промежутка времени. В этом варианте реализации для обнаружения износа резервного уплотнения штока или протечки в сильфонном уплотнении может быть использовано отслеживание медленного падения давления в камере 530. При обнаружении медленного падения давления может быть сгенерировано указание на отказ уплотнения или герметизации. В одном варианте реализации шток клапана может оставаться неподвижным вследствие процесса регулирующего клапана (например, длинный период открытого или закрытого состояния). В одном варианте реализации шток клапана может быть преднамеренно остановлен на длительный период времени для определения факта понижения давления в камере 530. В дополнительном варианте реализации отслеживание медленного падения давления может быть осуществлено в форме отдельного процесса, который выполняется одновременно с процессом, проиллюстрированным на фиг.5В.
Следует отметить, что хотя на фиг.5В проиллюстрирован конкретный порядок этапов, указанные этапы могут быть переставлены в другом порядке, но тем не менее они остаются в пределах объема настоящего изобретения. Например, вместо проверки на первом этапе перемещения штока клапана, в первую очередь может быть проверено изменение давления в сильфонной камере.
На фиг.5А показано, что позиционер 534 может принимать входные сигналы от датчика 532 положения и датчика 520 давления. Позиционер 534 может содержать вычислительные средства. Например, позиционер может содержать вычислительное устройство (например, цифровой позиционер), имеющее процессор и память, и может быть выполнен с возможностью исполнения программных инструкций (например, с сохранением их в памяти) для осуществления процесса, показанного на фиг.5В. Следует отметить, что хотя на фиг.5А показано, что процесс обнаружения или алгоритм могут быть осуществлены в позиционере, тем не менее вычислительное устройство, отдельное и отличающееся от позиционера клапана, в других вариантах реализации может быть использовано для сбора или приема данных с результатами измерений от этих двух датчиков 520 и 532 и применения описанного здесь алгоритма для определения отказа сильфона.
Существующие системы, которые просто измеряют изменения давления во внутренней полости 503 корпуса регулирующего клапана, не могут предоставить информацию для обнаружения отказа сильфона или уплотнения. Иными словами, существующие системы имеют тенденцию к ложным предупреждениям. В частности, для указанных систем трудно различить, является ли изменение в давлении (например, снижение давления) следствием перемещения штока клапана или влияния изменений температуры на газ, захваченный в сильфонной камере (например, между сильфоном и уплотнением). Проникновение газа через сильфон, которое не является условием протечки, может вызвать увеличение температуры в течение длительного времени и может спровоцировать ложное предупреждение. Схожим образом, увеличение температуры среды, окружающей регулирующий клапан, также может спровоцировать ложное предупреждение.
В одном варианте реализации после обнаружения протечки или отказа сильфона, в камеру может быть введен инертный газ для гарантии безопасной работы регулирующего клапана, пока не будет выполнен ремонт.
Обнаружение износа пневматических трубок и диафрагмы привода
Протечки привода способствуют ухудшению работы регулирующего клапана, двумя потенциальными областями протечки являются воздушные манометровые трубки для пневматического привода и поврежденные диафрагмы привода. Датчики давления могут быть использованы для обнаружения приложенного к пневматическому приводу давления, и данные от датчиков давления могут указать на неправильное функционирование давления (например, повышенную скорость потока газа через привод), которое таким образом указывает на протечку в приводе. Однако определение причин или места указанной протечки привода затруднено. Таким образом, отслеживание лишь одного приложенного давления привода не обеспечивает достаточную информацию для идентификации поврежденного компонента привода. В одном варианте реализации может быть использован алгоритм для определения и идентификации причины ухудшения рабочих характеристик регулирующего клапана из-за протечки компонента привода.
На фиг.6А показан регулирующий клапан, выполненный с возможностью идентификации протечки среди нескольких компонентов пневматического привода, согласно одному из вариантов реализации. Позиционер 34 может быть цифровым позиционером, который содержит вычислительное устройство для управления позиционером и для исполнения алгоритма обнаружения (как дополнительно описано далее). В варианте реализации, показанном на фиг.6А, переключатель 91 потока может быть установлен на воздушном клапане 45 привода и подключен к позиционеру 34. В этом варианте реализации воздушный клапан 45 привода может быть соединен с впускным отверстием 92 переключателя 91, а выпускное отверстие 93 переключателя 91 открыто в окружающую атмосферу. Переключатель потока по существу распознает перепад давления между своими впускным и выпускным отверстиями и активирует электрический переключатель при достижении предварительно заданного уровня потока. Переключатель 91 может быть имеющимся в продаже переключателем потока. Переключатель 91 может быть пассивным элементом, который для своей работы не требует питания от внешнего источника энергии.
В одном варианте реализации переключатель 91 может быть присоединен к воздушному клапану 45 для указания, когда воздушный клапан привода выпускает газ. Известные цифровые позиционеры могут содержать средства диагностики для отслеживания давление в камере привода. Например, подобный варианту реализации пружины привода, описанному выше, датчик давления может распознавать приложенное к приводу давление и передавать результаты измерений цифровому позиционеру. Как описано выше, цифровой позиционер может обнаружить наличие некоторой протечки, если например давление привода падает ниже заданного порогового значения. Однако, отслеживание одного лишь падения общего давления привода (например, в камере корпуса диафрагмы), может не предоставить достаточную информацию для идентификации причин протечки.
В варианте реализации, использующем устройство, показанное на фиг.6А, может быть использован алгоритм для быстрой идентификации причины протечки. Фиг.6В иллюстрирует алгоритм или процесс обнаружения протечки. На этапе 600 понижение давления привода может генерировать указатель протечки привода. После приема или регистрации сгенерированного указанного указатель протечки, переключатель потока диафрагмы может быть опрошен на этапе 601 для определения состояния потока. Если переключатель потока на этапе 602 указывает, что газ выходит через воздушный клапан привода, может иметься протечка манометровой трубки. При наличии такого условия цифровой позиционер или устройство обнаружения на этапе 603 могут генерировать указатель протечки трубки. Если переключатель потока на этапе 602 указывает, что газ не выходит через воздушный клапан привода, то на этапе 604 может быть определен факт перемещения штока клапана. Факт перемещения штока клапана может быть определен посредством известных датчиков перемещения или положения штока клапана, которые распознают положение/перемещение штока привода и клапана. Перемещение штока клапана в общем вызывает выпуск газа в атмосферу. Таким образом, если шток клапана перемещается, то причина протечки может быть неопределенной. В этом случае, процесс может ожидать период на этапе 605 перед повторным опросом переключателя 601 потока и повторением вышеописанных этапов процесса. Если на этапе 604 определено, что шток клапана не перемещается, и при этом на этапе 602 переключатель потока указывает на наличие вентиляции, то может иметь место отказ диафрагмы. В этом случае, на этапе 606 могут быть сгенерированы указатель дефектной диафрагмы или указатель отказа диафрагмы.
Как описано выше, переключатель потока может быть имеющимся в продаже пассивным переключателем потока. Например, переключатель потока может быть переключателем модели Gentech FCS-04 или Malema M-60/M064. Выполнение переключателя потока может быть различным и иметь закрытое положение или открытое положение, соответствующее открытому или закрытому воздушному клапану. Описанный выше алгоритм может быть сформирован соответствующим образом для согласования полярности переключателя.
Пружины и диафрагмы в известных конструкциях привода могут по существу подвергаться атмосферной коррозии на открытой внешней атмосфере стороне привода. Этот фактор внешней среды сокращает срок службы диафрагмы, и атмосферная коррозия из-за соли в оборудовании для морских применений или из-за присутствующих в атмосфере загрязняющих веществ может сократить эффективный срок службы пружин. Решение этой проблемы может состоять в соединении воздушного клапана позиционера с воздушным клапаном привода, как показано на фиг.7. На фиг.7 показано, что воздушный клапан 59 позиционера 34 сообщается с воздушным клапаном 45 корпуса 40. В этой конструкции, если позиционер 34 прикладывает давление к диафрагме 36, то газ может быть вытеснен из воздушного клапана привода 45 нисходящим перемещением диафрагмы 36 и пластины диафрагмы 37. Когда позиционер 34 вентилирует камеру корпуса 40 диафрагмы привода, диафрагма 36 перемещается вверх (в этой конструкции) и вентилирующий сжатый воздух выводится из воздушного клапана 59 позиционера в трубку, соединенную с воздушным клапаном 45 привода. Таким образом, воздух, входящий в привод 49, главным образом является сжатым воздухом из воздушного клапана позиционера 59, вместо внешнего атмосферного воздуха. Результат состоит в том, что диафрагма и пружины в основном входят в контакт со сжатым воздухом от источника сжатого воздуха, который обычно отфильтрован и высушен, вместо потенциально коррозийной атмосферы (например, насыщенной влагой и солью).
На фиг.8 показана система обнаружения протечки, использующая модифицированный позиционер 83 двойного действия, основанный на принципах, проиллюстрированных на фиг.7. В типичном позиционере двойного срабатывания для подачи сжатого воздуха в привод могут быть предусмотрены два выпускных подающих отверстия, причем каждым выпускным подающим отверстием может управлять назначенное пневматическое реле, такое как реле 84. При установке позиционера двойного срабатывания в мембранный привод, для работы которого необходим лишь один ввод сжатого воздуха, например привод 85, второе реле может быть заменено измерителем 86 потока. В этом случае, воздушный клапан 87 привода может быть соединен обратно с измененным позиционером 83 через переключатель 86 потока. Затем воздушный клапан 87 привода может быть соединен с воздушным клапаном 88 позиционера через переключатель 86 (внутренним соединительным каналом, не показан) и может давать результат, подобный устройству на фиг.7. Посредством этого регулирующий клапан может быть легко приспособлен для осуществления процесса диагностики, описанного выше, с защитой от коррозии благодаря конструкции связанных воздушных клапанов. Таким образом, модификация позиционера двойного действия для установки в привод, использующий диафрагму и пружины, может обеспечить экономичную интеграцию диагностической конструкции, описанной здесь, и также обеспечить более компактную конструкцию. Кроме того, переключатель 86, теперь расположенный непосредственно внутри позиционера 83, может быть легко встроен в схему позиционера или соединен с ней.
Преимущество обнаружения и идентификации дефектной трубки или дефектной диафрагмы привода состоит в различной стоимости исправления одного дефекта по сравнению с другим. Как правило, протечка трубки может быть исправлена легко и в течение краткого периода с использованием готовых доступных материалов без необходимости отключения клапан или его разборки. Например, в некоторых ситуациях способ ремонта может быть сведен к простой затяжке хомутов. С другой стороны, отказ диафрагмы может потребовать использования запасных частей, которые могут оказаться недоступными, и для установки которых может потребоваться значительно более длительный период. Кроме того, отказ диафрагмы может потребовать отключения регулирующего клапана с демонтажем привода.
Варианты исполнения вычислительного устройства
Вышеупомянутые процессы или алгоритмы могут быть осуществлены посредством вычислительных устройств для обнаружения износа деталей клапана и/или идентификации ошибки компонента во время работы регулирующего клапана. Алгоритм обнаружения износа может быть осуществлен в модуле обнаружения. Следует отметить, что термин «модуль обнаружения», используемый в настоящем описании, относится к этапу или элементу любого типа, посредством которых могут быть собраны данные, такие как данные от датчика, и выполнена некоторая обработка этих данных для определения события, такого как дефект или отказ, как описано выше. Таким образом, этот термин охватывает программное обеспечение, программируемое оборудование, аппаратные средства и/или другие элементы, которые выполняют указанные функции независимо от того, представлены ли эти элементы в форме функциональных модулей или модулей других типов, программам, подпрограммам или элементов.
Фиг.9 представляет вычислительное устройство, которое может быть использовано для осуществления алгоритма обнаружения. Компоненты вычислительного устройства 50 могут включать, помимо прочего, процессор 52, системную память 54 и системную шину 56, которая соединяет различные системные компоненты с процессором 52. Память 54 может представлять собой любой доступный носитель, который может иметь доступ процессор 52, и включает как энергозависимые, так и энергонезависимые носители, сменные и постоянные носители. Пользователь может ввести команды и информацию в вычислительное устройство 50 через пользовательские устройства 66 ввода, такие как клавиатура и координатно-указательное устройство. Эти и другие устройства ввода могут быть соединены с процессором 52 через интерфейс 60 пользовательского ввода, который может быть соединен с системной шиной 56. Монитор или дисплей другого типа также может быть соединен с процессором 52 через пользовательский интерфейс 60. Также могут быть использованы другие интерфейсные и шинные структуры. В частности, входы 62 от других устройств (например, датчиков) могут быть приняты в вычислительном устройстве 50 через интерфейс 58 ввода-вывода (I/O), и выходы 64 от вычислительного устройства 120 могут быть снабжены интерфейсом 58 ввода-вывода (I/O) для других устройств. Интерфейсы 58 и 60 соединяют различные устройства с процессором 52 через системную шину 56.
Фиг.10 представляет модуль 70 обнаружения, который может быть осуществлен в вычислительном устройстве 50, показанном на фиг.9. В одном варианте реализации модуль 70 обнаружения, представленный на фиг.10, может быть использован для реализации алгоритма обнаружения износа пружины привода в пневматическом регулирующем клапане путем приема входного сигнала, такого как изменение давления, приложенного к приводу, и длина перемещения клапана.
Логический блок 72 может принимать совокупность (т.е. один или более) сигналов 74 обнаружения/измерения и может вычислять параметры для совокупности технологических сигналов 74 (например, производные, средние значения и т.д.). Расчетный параметр (параметры) может быть принят (приняты) блоком 76 обнаружения, который действует в соответствии с правилами, содержавшимися в модуле 78 правил. Модуль 78 правил может быть реализован, например, в участке памяти 54 вычислительного устройства 50 (фиг.9) и может задавать алгоритм для обнаружения изношенного или дефектного компонента, как дополнительно будет описано далее.
В одном варианте реализации первый набор расчетных параметров может быть сохранен в блоке 80 формируемых значений. Формируемые значения могут быть вычислены и периодически обновляться, например, вычислительным устройством 50. Например, в одном варианте реализации формируемые значения могут быть сгенерированы логическим модулем 72, который генерирует или запоминает номинальные или нормальные параметры во время первого цикла работы, обычно периода нормальной работы процесса или во время фазы конфигурирования. Эти номинальные параметры впоследствии могут быть сохранены в качестве формируемых значений в блоке 80 формируемых значений для последующего использования. Эта операция обеспечивает возможность динамической регулировки блока 80 для заданного эксплуатационного режима. В этой ситуации параметры (которые могут быть использованы для формируемых значений) могут быть отслежены в течение выбранного пользователем промежутка времени на основе процесса или рабочей ситуации. В одном варианте реализации вычислительное устройство, такое как вычислительное устройство 50, может генерировать или принимать формируемые значения, или может быть использовано для передачи формируемых значений в другое обрабатывающее устройство.
Модуль 78 может содержать правила для обнаружения или идентификации ошибки компонента, как описано выше. Например, модуль 78 может содержать программные инструкции, которые реализуют по меньшей мере один процесс, описанный выше, для определения ошибки компонента. Модуль 76 обнаружения может быть запрограммирован для вывода предупреждения 82 при обнаружении ошибки.
В одном варианте реализации может быть осуществлено статистическое отслеживание технологического процесса для дополнительного улучшения по меньшей мере одного из алгоритмов обнаружения износа, описанных выше. Например, в применении к алгоритму обнаружения ошибки пружины, логический модуль 72 может определять базовое среднее значение (µ) и базовое среднеквадратичное отклонение (σ) изменения давления (ΔР) привода для данной длины (ΔT) перемещения стержня привода во время начальной конфигурации или периода обучения. Эти параметры можно считать представлением процесса в «нормальных» условиях. Затем указанные базовое среднее значение и базовое среднеквадратичное отклонение могут быть сохранены в памяти 54 в качестве формируемых значений (т.е. с использованием блока 80). Во время фазы отслеживания модуль 70, реализующий указанный алгоритм, может принимать текущие значения изменения давления и вычислять среднее значение () процесса и среднеквадратичное отклонение (s) изменения давления для данного изменения перемещения клапана (или наоборот).
С использованием реализованного SPM алгоритма, например, посредством вычислительного модуля 76, в модуле 76 обнаружения может быть обнаружен износ пружины, если фактическое или текущее среднее значение отличается от базового значения на величину, превышающую некоторый порог, и в этом случае может быть сгенерирован указатель или предупреждение 82. Например, отказ пружины может быть обнаружен, если текущее среднее значение более чем на некоторый процент ниже базового среднего значения:
где α - некоторый заданный пользователем процент (например 5%). Это уравнение может быть представлено в качестве по меньшей мере одного правила в модуле 78 правил. В одном варианте реализации модуль 70 обнаружения может содержать ввод для порога обнаружения (например, порог, определенный пользователем). В этом варианте реализации порог обнаружения может быть сохранен как формируемое значение.
В другом варианте реализации порог может быть установлен на основе отклонений, наблюдающихся во время фазы обучения. Например, ошибка пружины может быть обнаружена, если . В этом случае, наблюдаемое отклонение может быть сохранено в памяти 54 посредством блока 80 формируемых значений. Таким образом, в этом варианте реализации порог обнаружения определяется автоматически, и количество ручного конфигурирования может быть сокращено. Следует отметить, что помимо множителя 3 может быть использован любой другой множитель для вычисления среднеквадратичного отклонения в зависимости от наблюдаемого или обнаруженного отклонения. Кроме того, хотя переменная отклонения может быть автоматически вычислена модулем обнаружения, указанная переменная может быть введена в форме сконфигурированного самим пользователем параметра в качестве формируемой переменной (например, посредством пользовательского ввода/вывода 66).
В другом варианте реализации может быть задано исходное значение жесткости пружины (например, задано изготовителем для конкретного пневматического регулирующего клапана), и эта исходная жесткость пружины может быть сохранена в качестве формируемого значения без вычисления или проверки исходной жесткости пружины. В одном варианте реализации заданные пределы для алгоритмов могут быть сохранены в блоке 80 формируемых значений.
Схожим образом, к алгоритму обнаружения протечки сильфона может быть применен SPM алгоритм, при котором логический модуль 72 может определить базовое среднее значение (µ) и базовое среднеквадратичное отклонение (σ) изменения давления в сильфонной камере для данного перемещения штока клапана (или наоборот) во время начального периода. Во время фазы отслеживания модуль 70 обнаружения, осуществляющий указанный алгоритм, может принять текущие значения изменения давления и перемещения штока клапана и вычислить среднее значение () процесса и среднеквадратичное отклонение (s) одной переменной в зависимости от изменения другой переменной. Если разность между фактическим и ожидаемым отклонениями превышает заданный порог, может быть сгенерирован указатель протечки сильфона.
Автоматизированная система управления технологическими процессами для использования с модулем обнаружения износа пружины привода
В общем, регулирующий клапан, такой как описанный выше, может быть использован в автоматизированной системе управления технологическими процессами и управляться указанной системой, подобной той, которая представлена на фиг.11. Модуль обнаружения, содержащий указанный алгоритм, может быть выполнен в форме по меньшей мере одного компонента автоматизированной системы управления технологическими процессами, показанной на фиг.11.
Как показано на фиг.11, примерный технологический участок 210 может содержать несколько систем управления и обслуживания, связанных с поддерживающим оборудованием посредством по меньшей мере одной коммуникационной сети. В частности, технологический участок 210, показанный на фиг.11, может содержать по меньшей мере одну автоматизированную систему 212 и 214 управления технологическими процессами. Система 212 может быть традиционной автоматизированной системой управления технологическими процессами, такой как PROVOX или система RS3, или любой другой системой управления, которая содержит интерфейс 212А оператора, соединенный с контроллером 212В и с картами 212С устройств ввода-вывода (I/O), которые в свою очередь соединены с различными полевыми устройствами, такими как аналоговые полевые устройства и полевые устройства 215 типа магистрального адресуемого дистанционного передатчика (HART®). Система 214, которая может быть распределенной автоматизированной системой управления технологическими процессами, содержит по меньшей мере один интерфейс 214А оператора, соединенный по меньшей мере с одним распределенным контроллером 214В посредством шины, такой как шина Ethernet. Контроллеры 214В могут быть например контроллерами DeltaV™, продаваемыми компанией Emerson Process Management (г.Остин, штат Техас), или контроллерами любого другого подходящего типа. Контроллеры 214В соединены через устройства ввода/вывода по меньшей мере с одним полевым устройством 216, таким, например, как полевые устройства HART или FOUNDATION™ Fieldbus, или любым другим интеллектуальным или неинтеллектуальным полевым устройством, включая например те, в которых используются любые из протоколов типа PROFIBUS®, WORLDFIP®, Device-Net®, интерфейс датчиков и исполнительных устройств (AS-lnterface) и протокол CAN (Controller Area Network).
Контроллер технологического процесса, такой как контроллер 212В или 214В технологического процесса, может быть по существу связан с сетевой системой технологического участка для предоставления информации о работе под управлением контроллера технологического процесса (например, полевого устройства) и приема задающих сигналов от сетевой системы технологического участка, которые используются при регулировке функционирования контроллера технологического процесса. Как известно, полевые устройства 215 или 216 могут управлять физическим параметром процесса (например, в качестве привода в регулирующем клапане или другом механизме) или могут измерять физический параметр процесса (например, в качестве датчика). Полевые устройства могут быть связаны с контроллерами 212В или 214В для приема сигнала управления технологическим процессом или предоставления данных о физическом параметре процесса. Связь может быть осуществлена с использованием аналоговых или цифровых сигналов. Устройства ввода/вывода, такие как устройство 212С, могут принимать сообщения от полевого устройства для передачи в контроллер технологического процесса или могут принимать сообщения от контроллера технологического процесса для передачи в полевое устройство. Интерфейсы 214А (или 212А, или 218) оператора могут сохранять и выполнить сервисные программы 217, 219, доступные для оператора управления технологическим процессом, для управления ходом процесса, включая например управляющие программы-оптимизаторы, диагностические экспертные программы, нейронные сети, программы-настройщики и т.п.
Системы обслуживания могут быть соединены с системами 212 и 214 или с отдельными устройствами указанных систем для выполнения диагностических и отслеживающих операций. Например, обслуживающий компьютер 218 может быть соединен с контроллером 212В и/или с устройством 215 через любые подходящие коммуникационные линии связи или сети (включая беспроводные сети или сети мобильных устройств) для связи с устройствами 215 и в некоторых случаях для повторного формирования или выполнения других действий по обслуживанию устройств 215. Точно так же могут быть установлены и выполнены сервисные приложения по меньшей мере в одном пользовательском интерфейсе 214А, связанном с распределенной системой 214, для осуществления обслуживающих и отслеживающих функций, включая сбор данных, относящихся к текущим состояниям устройств 216.
Вычислительная система или рабочая станция 274, которая может представлять собой любую из рабочих станций 212А, 214А или 218, как правило могут включать процессор 274А, память 274В и дисплей 274С. Рабочая станция 274 может осуществлять по меньшей мере часть функций системы 235 предотвращения аварийных ситуаций (иногда называемой системой предотвращения аварийных ситуаций), и, в частности, вычислительная система 274 может сохранять (например, с использованием памяти 274В) и выполнять функции конфигурационного приложения 238 и диагностической системы 242 (например, с использованием процессора 274А) для предоставления информации пользователю посредством дисплея 274С (или любой другого устройства вывода, такого как принтер). Дополнительно, вычислительная система 274 может осуществлять функции аварийного/сигнального приложения 243. Разумеется, система 235 обнаружения, аварийное приложение 243 и/или конфигурационная система 238 могут быть выполнены в форме единого программного модуля или в форме различных программных компонентов.
База 278 данных может быть соединена с коммуникационной шиной 245 для работы в качестве архива данных, в котором собрана и сохранена информация о конфигурации, а также оперативные технологические переменные данные, данные о параметрах, данные о состоянии, и другие данные, связанные с контроллерами 212В или 214В технологического процесса и полевыми устройствами 215 или 216, входящими в состав технологического участка 210.
Система 235 предотвращения аварийных ситуаций может быть по существу связана с модулями обнаружения, дополнительно расположенными в полевых устройствах 215, 216, контроллерах 212В, 214В и любых других подходящих устройствах и оборудовании, входящих в состав технологического участка 210, и/или с диагностической системой 242, входящей в состав вычислительной системы 274, для конфигурации каждого из этих компонентов для приема информации, относящейся к работе устройств или подсистем, которые они отслеживают. Система 235 предотвращения аварийных ситуаций может быть соединена через аппаратную шину 245 с каждым по меньшей мере из некоторых компьютеров или устройств, входящих в состав технологического участка 210, или в другом варианте реализации изобретения она может быть соединена через любую другую подходящую линию связи, включая, например, беспроводные линии связи, выделенные линии, которые используют OPC (Optical Phase Conjugated), временные линии связи, такие как используемые в переносных устройствах для сбора данных и т.п. Схожим образом, система 235 предотвращения аварийных ситуаций может принимать данные, относящиеся к полевым устройствам и оборудованию, входящим в состав технологического участка 210, через локальные вычислительные сети или сети с открытым доступом, такие как Интернет, телефонная сеть, и т.п. (представлено на фиг.11 как соединение 246 с сетью Интернет), причем указанные данные могут быть собраны, например, третьим лицом - провайдером услуг. Дополнительно, система 235 может быть соединена с компьютерами/ устройствами, входящими в технологический участок 210, с использованием различных технологий подключения и/или протоколов, включая, например, Ethernet, Modbus, HTML, XML, a также частные технологии/протоколы и т.п.
Дополнительно, каждое из полевых устройств 215 и 216 может быть устройством любого типа, таким как, например, датчик, клапан, передатчик, позиционер, и т.п., и может поддерживать любой подходящий открытый, частный или другой коммуникационный или программный протокол. Также подразумевается, что устройства 212С ввода/вывода могут быть совместимыми с подходящим протоколом, используемым полевыми устройствами 215.
Каждое по меньшей мере из одного полевого устройства 215 и 216 может содержать память (не показана) для хранения подпрограмм, таких как подпрограммы для реализации алгоритмов обнаружения, для обнаружения неисправного компонента, которые будет описаны далее. Каждое по меньшей мере из одного полевого устройства 214 и 216 также может содержать процессор (не показан), который исполняет подпрограммы, такие как подпрограммы для осуществления сбора данных от датчиков и/или подпрограммы для обнаружения неисправного компонента. Следует отметить, что сбор данных от датчиков и/или обнаружение неисправного компонента не обязательно могут быть осуществлены программным обеспечением. Специалист согласится с тем, что такие системы могут быть осуществлены любой комбинацией программного обеспечения, программируемого оборудования и/или аппаратных средств, расположенных внутри по меньшей мере одного полевого устройства и/или других устройств.
Модуль 70 обнаружения, показанный на фиг.10, может быть реализован полностью или частично в полевом устройстве, и затем полевое устройство может быть соединено с пневматическим регулирующим клапаном, подобным тем, которые описаны выше. В одном варианте реализации модуль обнаружения может быть реализован в контроллере 212В или 214В технологического процесса, рабочей станции 274 (например, посредством прикладной системы 242 обнаружения), или некотором другом устройстве. В другом варианте реализации изобретения обрабатывающие блоки модуля 70 обнаружения могут быть полностью встроены в полевое устройство (например, 215 или 216) или распределены между полевым устройством и контроллером технологического процесса. В одном конкретном выполнении модуль 70 обнаружения может быть осуществлен в форме функционального блока, такого как функциональный модуль, описанный выше и использованный в автоматизированной системе управления технологическими процессами, которая поддерживает протокол полевой шины FOUNDATION™ Fieldbus.
Поскольку отказ компонента может быть обнаружен с использованием различных комбинаций датчиков (как описано выше), любое из полевых устройств, показанных на фиг.11, имеющее датчик, может быть использовано для выполнения измерения соответствующих параметров (например, давления, перемещения, потока, и т.п.). Однако использование полевого устройства со встроенной обработкой сигналов (например, Rosemount 3051S с предотвращением аварийных ситуаций) может обеспечивать некоторые преимущества. В частности, поскольку полевое устройство управления технологическим процессом имеет доступ к собранным данным с более высокой скоростью по сравнению с главной системой (например, рабочая станция, принимающая данные измерений от полевых устройств через контроллер технологического процесса), данные от датчиков, вычисленные в полевом устройстве, могут быть более точными. В результате модули обнаружения, реализованные в полевом устройстве, могут обеспечивать по существу более точные вычисления собранных данных от датчиков по сравнению с модулем, размещенным за пределами устройства, в котором собираются данные от датчиков. Таким образом, в некоторых ситуациях может быть достигнуто более быстрое обнаружение ошибки, если используется полевое устройство со встроенной обработкой сигнала.
Следует отметить, что полевое устройство модели Rosemount 3051 FOUNDATION™ Fieldbus имеет улучшенный диагностический модуль (ADB), снабженный возможностью статистического отслеживания процесса (SPM). Этот блок SPM может быть выполнен с возможностью сохранения базового среднего значения и среднеквадратичного отклонения технологического параметра (например, графическую характеристику), сравнения сохраненных технологических параметров с их текущим средним значением и среднеквадратичным отклонением, и задействования системы предупреждений Plant Web® в случае превышения любым из этих изменений порога, заданного пользователем. Функциональные средства SPM в полевом устройстве могут быть выполнены с возможностью работы в качестве модуля обнаружения, выполненного на основе описанного в настоящем описании модуля для обнаружения неисправного компонента.
Аварийное/сигнальное приложение 243 может быть использовано для управления и/или маршрутизации предупреждений, сгенерированных модулем 70 обнаружения, относящимся к технологическому участку 210, причем модуль 70 обнаружения может реализовывать по меньшей мере один алгоритм из описанных выше. В этом случае, при обнаружении факта износа или отказа, человеку или группе, ответственным за отслеживание и обслуживающие действия (например, оператору, инженеру, обслуживающему персоналу и т.п.), может быть передано целенаправленное предупреждение. Оператору может быть обеспечена интерактивная помощь в устранении аварийной ситуации через пользовательский интерфейс (например, в рабочей станции 274, соединенной с автоматизированной системой управления технологическими процессами). Корректирующие действия, которые могут быть предложены пользователю в ответ на предупреждение, могут содержать инструкции для восстановления компонента или планирование обслуживания регулирующего клапана. Например, при обнаружении протечки привода, описанной выше, после приема указателя источника протечки привода (например, отказ диафрагмы или регулирующей трубки), рабочая станция 274 может направить или предоставить пользователю инструкцию о затяжке хомутов для устранения протечки трубки или запланировать замену диафрагмы привода.
Модуль 70 обнаружения может предоставлять информацию системе 235 предотвращения аварийных ситуаций через аварийное приложение 243 и/или другие системы, имеющиеся на технологическом участке. Например, указатель ошибки, сгенерированный блоком 76 обнаружения, может быть передан системе 235 и/или аварийному/сигнальному приложению 243 для уведомления оператора о возникновении дефекта. В качестве еще одного примера, модуль 70 может передавать значения параметра системе 235 так, чтобы оператор мог видеть указанные значения (например, в случае обнаружения ошибки компонента).
В автоматизированной системе управления технологическими процессами модуль 70 (реализованный в полевом устройстве или контроллере технологического процесса) может быть соединен с конфигурирующим приложением 238 для предоставления пользователю возможности конфигурировать модуль 70. Например, по меньшей мере один блок модуля 70 может иметь сконфигурированные пользователем параметры (например, исходная жесткость пружины привода, которая предоставлена изготовителем или считана из базы данных технологического участка), которые могут быть изменены посредством конфигурирующего приложения 238.
Хотя выше изложенный текст содержит подробное описание различных вариантов реализации, следует понимать, что юридический объем настоящего описания задан пунктами формулы, приложенной в конце настоящего патента. Настоящее подробное описание рассматривается лишь в качестве примера и не описывает все возможные варианты реализации, поскольку описание каждого возможного варианта реализации представляется непрактичным, если не невозможным. Разумеется, могут быть осуществлены различные модифицированные варианты реализации или с использованием современной технологии, или с использованием технологии, которая будет разработана после даты подачи заявки на настоящее изобретение, которые все находятся пределах объема формулы изобретения.
Реферат
Заявленные способ и система идентифицируют ошибки и/или износ компонентов управляющего клапана. Система может использовать различные комбинации датчиков для обеспечения необходимых данных для вычисления целостности компонента, характеристики которого отклоняются от нормальных. Для указания потенциального отказа компонента могут генерироваться предупреждения. В частности, система может обнаруживать потенциальный износ и/или ошибки пружин привода, пневматической трубки и сильфонных уплотнений. Заявленная система может быть соединена с сетью управления технологическим процессом для формирования более сложной системы аварийной сигнализации. Кроме того, для повышения точности обнаружения системы могут быть использованы дополнительные статистические способы. 9 н. и 22 з.п. ф-лы, 11 ил.
Формула
определяют исходное значение (Kinitial) жесткости пружин привода в регулирующем клапане во время первого цикла работы,
распознают длину (ΔТ) перемещения стержня привода, соединенного с приводом,
распознают изменение приложенного к приводу давления (ΔР), причем указанное изменение приложенного давления соответствует указанной длине (ΔT) перемещения клапана,
определяют текущее значение (Kcurrent) жесткости указанных пружин привода во время второго цикла работы регулирующего клапана на основе распознанной длины (ΔТ) перемещения и соответствующей распознанной разности (ΔР) давления, и
генерируют указатель отказа пружины, если текущее значение (Kcurrent) жесткости пружины отличается от исходного значения (Kcurrent) жесткости пружины на величину, превышающую заданный порог.
где n - общее количество пружин.
ΔРА=ΔТК, где А - эффективная площадь диафрагмы привода.
первое устройство ввода для приема данных о давлении, приложенном к диафрагме пневматического привода в регулирующем клапане,
второе устройство ввода для приема данных о длине перемещения стержня привода регулирующего клапана,
процессор и соединенная с ним память, причем процессор запрограммирован для:
вычисления жесткости пружины на основе данных о давлении и данных о перемещении,
определения факта отказа пружины в пневматическом регулирующем клапане на основе данных датчика, и
генерации указателя в случае отказа пружины.
ΔРА=ΔТКа,
где Ка - жесткость пружины,
ΔT - длина перемещения между первым положением стержня и вторым положением стержня,
ΔР - разность давления,
А - эффективная площадь диафрагмы для диафрагмы привода.
автоматизированную систему управления технологическими процессами, включающую рабочую станцию, контроллер технологического процесса и полевые устройства, причем рабочая станция, контроллер технологического процесса и полевые устройства соединены друг с другом,
регулирующий клапан, включающий привод, диафрагму привода и пружину привода для смещения диафрагмы привода, причем по меньшей мере одно полевое устройство выполнено с возможностью измерения давления, приложенного к диафрагме, и по меньшей мере одно полевое устройство выполнено с возможностью измерения длины перемещения стержня привода, соединенного с диафрагмой привода, и
устройство обнаружения, выполненное с возможностью приема данных об измеренных давлении привода и длине перемещения стержня привода, получения доступа к сохраненному исходному значению жесткости пружины и генерации предупреждения, если разность между расчетным значением жесткости пружины и исходным значением жесткости пружины превышает заданный порог.
распознают перемещение штока клапана в регулирующем клапане,
распознают давление в сильфонной камере, сформированной сильфоном, который присоединен к первой части штока клапана, и уплотняющим элементом клапана, который присоединен ко второй части штока клапана, и
генерируют указатель отказа сильфона, если изменение давления в сильфонной камере не соответствует перемещению штока клапана.
шток клапана, проходящий через поверхность корпуса клапана в отверстие в корпусе клапана,
сильфон, первый конец которого прикреплен к первой части штока клапана в корпусе клапана, и второй конец которого прикреплен к отверстию корпуса клапана, причем сильфон изолирует внутреннюю часть корпуса клапана от отверстия клапана,
уплотняющий элемент, расположенный вокруг и между отверстием в корпусе клапана и штоком клапана,
сильфонную камеру, сформированную между сильфоном и уплотняющим элементом,
датчик давления, выполненный с возможностью измерения давления в сильфонной камере,
датчик положения для измерения перемещения штока клапана, и
устройство для приема данных от датчика давления и датчика положения, выполненное с возможностью генерации указателя отказа сильфона, если давление в сильфонной камере не меняется с перемещением штока клапана.
регулирующий клапан, содержащий:
корпус клапана,
шток клапана, проходящий через отверстие в корпусе клапана,
сильфон, первый конец которого прикреплен к первой части штока клапана в корпусе клапана, и второй конец которого прикреплен к отверстию в корпусе клапана, причем сильфон изолирует внутреннюю часть корпуса клапана от отверстия клапана,
уплотняющий элемент, расположенный вокруг и между отверстием корпуса клапана и штоком клапана, и
сильфонную камеру, сформированную между сильфоном и уплотняющим элементом;
автоматизированную систему управления технологическими процессами, содержащую рабочую станцию, контроллер технологического процесса и полевые устройства, причем рабочая станция, контроллер технологического процесса и полевые устройства соединены друг с другом, при этом по меньшей мере одно полевое устройство выполнено с возможностью измерения давления, приложенного к сильфонной камере, и по меньшей мере одно полевое устройство выполнено с возможностью измерения перемещения штока клапана; и
устройство обнаружения, выполненное с возможностью приема данных об измеренных давлении в сильфонной камере и перемещении штока клапана, и генерации предупреждения, если давление в сильфонной камере не меняется с перемещением штока клапана.
распознают перемещение стержня привода, причем стержень привода соединен с приводом регулирующего клапана,
распознают давление, приложенное к камере привода,
обнаруживают наличие протечки газа привода на основании данных от датчиков о приложенном к приводу давлении и перемещении стержня привода,
если обнаружена протечка газа определяют, указывает ли переключатель потока, соединенный с воздушным клапаном привода, на выпуск газа через воздушный клапан привода,
если переключатель потока не указывает на выпуск газа, то генерируют указатель протечки пневматической трубки, и
если переключатель потока указывает на выпуск газа, и измерение регулирующего клапана указывает на его перемещение, то генерируют указатель отказа диафрагмы привода.
пневматический привод, имеющий подающее впускное отверстие и выпускной воздушный клапан,
переключатель потока, имеющий первое отверстие, открытое в окружающую атмосферу, и второе отверстие, сообщающееся с воздушным клапаном выпускного отверстия привода,
датчик давления, выполненный с возможностью распознавания давления, приложенного к камере привода,
датчик положения для распознавания перемещения штока клапана и устройство для приема данных от переключателя потока, датчика давления и датчика положения, причем указанное устройство выполнено с возможностью генерации указателя протечки пневматической трубки, если переключатель потока не указывает на выпуск газа, и генерации признака отказа диафрагмы привода, если переключатель потока указывает на выпуск газа, и отслеживание регулирующего клапана указывает на его перемещение.
регулирующий клапан, содержащий пневматический привод, имеющий подающее впускное отверстие и выходной воздушный клапан, переключатель потока, имеющий первое отверстие, открытое в окружающую атмосферу, и второе отверстие, сообщающееся с воздушным клапаном выпускного отверстия привода,
автоматизированную систему управления технологическими процессами, содержащую рабочую станцию, контроллер технологического процесса и несколько полевых устройств, причем рабочая станция, контроллер технологического процесса и несколько полевых устройств соединены друг с другом, при этом по меньшей мере одно полевое устройство соединено с переключателем потока для определения потока текучей среды от воздушного клапана выпускного отверстия привода, а по меньшей мере одно полевое устройство выполнено с возможностью измерения давления, приложенного к камере привода, и по меньшей мере одно полевое устройство выполнено с возможностью измерения длины перемещения штока клапана, и
устройство обнаружения, выполненное с возможностью приема данных от датчиков об измеренных потоке, давлении в камере привода и перемещении штока клапана, причем устройство дополнительно выполнено с возможностью генерации указателя протечки пневматической трубки, если определено, что газ не выпускается из выпускного отверстия привода, и генерации указателя отказа диафрагмы привода, если переключатель потока указывает на выпуск газа, и отслеживание регулирующего клапана указывает на его неподвижность.
Документы, цитированные в отчёте о поиске
Клапанное устройство для переключения жидкостей из одного канала корпуса в другой
Комментарии