Летательный аппарат вертикального взлета и посадки - RU2591103C2
Код документа: RU2591103C2
Чертежи




Описание
Изобретение относится к авиационной технике, а именно к летательным аппаратам (ЛА) вертикального взлета и посадки, и может быть использовано в гражданской и военной авиации, а также в космонавтике.
Наиболее близким по технической сущности к заявленному является летательный аппарат вертикального взлета и посадки (RU 2266846 С2, В64С 29/02, В64С 21/04, опубл. 27.12.2005 г.). Данный ЛА включает реактивную силовую установку, размещенную в центре плоского круглого в плане крыла, которая включает турбокомпрессоры. Подъемная сила в известном ЛА образуется за счет разности статического давления атмосферного воздуха, действующего на ЛА снизу, и статического давления круговой радиально-расходящейся воздушно-реактивной струи, действующего на ЛА сверху.
Недостатками указанного ЛА является невозможность обеспечения достаточной подъемной силы и весовой отдачи, в том числе при больших расходах горючего, которые затрачиваются на снятие статического давления сверху, что снижает экономичность и надежность ЛА.
Техническим результатом предлагаемого изобретения является создание экономичного и надежного летательного аппарата, способного осуществлять движение вертикально, горизонтально или под любым наклоном, используя струи воздуха.
Указанный технический результат достигается тем, что летательный аппарат вертикального взлета и посадки содержит по меньшей мере два лопастных движителя, нижний из которых выполнен тарелкообразной формы, а верхний - плоской или тарелкообразной формы, при этом каждый лопастной движитель содержит реактивную силовую установку, а каркас каждого лопастного движителя установлен на металлическом диске, связанном с вертикальным валом летательного аппарата, и снабжен лопастями, установленными с возможностью изменения своего положения.
При этом летательный аппарат может содержать по меньшей мере один промежуточный лопастной движитель, установленный между верхним и нижним лопастными движителями и выполненный плоским или тарелкообразным.
Летательный аппарат может быть снабжен кабиной.
Реактивная силовая установка (РСУ) каждого лопастного движителя включает по меньшей мере один воздушный двигатель и ресиверы, соединенные с компрессором или компрессорами.
Для обеспечения бокового движения летательный аппарат снабжен по меньшей мере одним лопастным движителем горизонтального движения и воздухозаборниками, сообщающимися посредством ресиверов внутреннего лопастного движителя с регулирующими перепускными клапанами.
Каркас каждого лопастного движителя выполнен металлическим и включает по меньшей мере два кольца, одно из которых соединено с диском, а также радиальные прожилины, установленные по периметру каркаса лопастного движителя и соединенные с кольцами и лопастями.
Для изменения положения лопастей летательный аппарат снабжен автоматами регулировки наклона лопастей и/или автоматами регулировки выдвижения лопастей.
Лопасти могут быть установлены:
- по меньшей мере в один ряд по периметру каркаса;
- по меньшей мере в один ярус;
- частично заходящими друг на друга.
Летательный аппарат дополнительно содержит боковые лопасти, расположенные на каркасах лопастных движителей и выполненные с возможностью изменения угла своего поворота до 90°.
Летательный аппарат содержит электрогенераторы.
Для обеспечения горизонтального положения во время полета летательный аппарат может быть снабжен крылом равновесия, установленным на каркасе верхнего лопастного движителя и выполненным с возможностью регулировки его поворота.
Летательный аппарат может быть снабжен опорами для обеспечения приземления и стоянки летательного аппарата.
Наличие в летающем аппарате лопастных движителей, которые при посадке и при движении в любую сторону используют встречную силу ветра, позволяет преодолеть верхнее атмосферное сопротивление за счет прохождения воздуха сверху вниз сквозь лопастные движители, помогая летательному аппарату подняться, развить большую скорость (как при наборе высоты, так и при движении), а также сэкономить энергию при движении.
ЛА содержит по меньшей мере два лопастных движителя - нижний и верхний. В зависимости от грузоподъемности ЛА он может содержать по меньшей мере один промежуточный лопастной движитель. Нижний лопастной движитель имеет тарелкообразную форму, а верхний и промежуточные лопастные движители могут иметь как тарелкообразную, так и плоскую форму. Промежуточный лопастной движитель или несколько промежуточных лопастных движителя устанавливают между верхним и нижним лопастными движителями. Каждый из лопастных движителей устанавливается горизонтально на соответствующий диск, соединенный с вертикальным валом ЛА.
Каркас каждого лопастного движителя (верхнего, нижнего, промежуточного) выполнен металлическим, снабжен лопастями и включает по меньшей мере два кольца (малое и большое), одно из которых механически (большое) закреплено на соответствующем диске, а также радиальные прожилины (опорные балки), установленные под наклоном и соединенные с кольцами. Каркасы лопастных движителей могут содержать одно или несколько промежуточных колец, установленных между малым и большим кольцами. Количество промежуточных колец зависит от размеров ЛА (чем больше ЛА, тем больше может быть установлено промежуточных колец) и от размера лопастей.
Все кольца (в том числе и промежуточные) каркасов лопастных движителей между собой механически скреплены радиальными прожилинами.
Радиальные прожилины (опорные балки) могут быть установлены по горизонтали (плоский лопастной движитель) или с наклоном относительно вертикали (тарелкообразный лопастной движитель). Прожилины могут быть выполнены прямыми или дугообразными (для сферических ЛА). Количество прожилин выбирают в зависимости от количества и размеров лопастей.
Радиальные прожилины и кольца каркасов лопастных движителей могут иметь профиль как круглой формы (в виде труб), так и другой формы.
Радиальные прожилины каркасов лопастных движителей можно использовать также как дополнительные ресиверы при аварийной посадке ЛА.
При необходимости, в качестве каркаса лопастных движителей можно использовать конструкцию в виде фермы.
Лопасти устанавливаются по всему периметру каркаса каждого лопастного движителя и закрепляются на опорных осях (радиальных прожилинах) с возможностью бокового вращения на оси (вправо или влево). Лопасть может крепиться к прожилине в любом месте - как в центральной части лопасти, так и с краю.
Лопасти могут быть установлены по меньшей мере в один ряд по всему периметру каркаса лопастного движителя. Ряд лопастей располагают между двумя кольцами каркаса лопастного движителя. Для каждого следующего ряда лопастей в каркасе лопастного движителя добавляют одно промежуточное кольцо. Диаметры промежуточных колец зависят от длины лопасти в добавляемом ряду и размера каркаса лопастного движителя ЛА.
Лопасти могут быть установлены различным образом: примыкающими друг к другу, частично заходящими друг на друга или с зазором друг относительно друга.
Лопасти изготавливают из металла. Количество лопастей и их ширина может быть различной и зависит от размеров ЛА. Предпочтительно лопасти выполнять плоскими, трапециевидной формы.
Лопасти могут быть также расположены по меньшей мере в один ярус. Количество ярусов лопастей выбирают в зависимости от требуемой мощности ЛА. Причем второй и следующие ярусы лопастей закрепляют под верхним ярусом (рядом) лопастей. Размер лопастей второго и следующих ярусов может быть равен размеру верхних лопастей, а может отличаться. В каждом случае делают отдельный расчет размеров лопастей. Лопасти второго и следующих ярусов могут быть установлены параллельно или с небольшим наклоном к верхнему ярусу лопастей. Расстояние между ярусами лопастей может быть разным.
Для лопастей предусмотрен автомат регулировки наклона лопасти и/или автомат регулировки выдвижения лопасти, установленные на валу и позволяющие управлять работой лопасти - боковым наклоном лопасти и выдвижением лопасти в вертикальной плоскости (поднятием или опусканием), т.е. изменять положение лопасти. При этом лопасть соединена с регулировочным автоматом наклона лопасти посредством регулировочного рычага. Лопасть соединена с регулировочным автоматом выдвижения лопасти посредством регулировочного рычага и стержня, один конец которого закреплен посредством шарнирных опор с одним из колец (меньшим) каркаса, а другой - с соответствующей лопастью. Стержни устанавливают параллельно радиальным прожилинам и равномерно по всему радиусу каждого каркаса лопастных движителей.
Регулировочные автоматы наклона и выдвижения лопастей позволяют обеспечить автономную и синхронную работу каждого ряда (или яруса) лопастей ЛА.
Стержни, с которыми соединены лопасти, шарнирно закрепляют к кольцу (малому) каркаса лопастных движителей.
ЛА может дополнительно содержать боковые (вертикальные) лопасти, расположенные на каркасах лопастных движителей (по краям) и выполненные с возможностью изменения угла своего поворота до 90°. Движение боковой лопасти обеспечивает автомат регулировки наклона боковых лопастей и/или автомат регулировки выдвижения боковой лопасти, установленные на валу и позволяющие управлять работой боковой лопасти. Боковые лопасти соединены с автоматами регулировки таким же образом, как и остальные лопатки лопастных движителей. При движении в горизонтальной плоскости наклоняется одна сторона боковой лопасти для захвата воздуха, а при посадке добавляется выдвижение (поднятие) боковой лопасти. Угол поворота боковой лопасти регулируется в зависимости от нужной скорости посадки или набора высоты ЛА. Боковые лопасти могут быть выполнены прямоугольной формы и установлены на шаровых опорах. Стержни, с которыми соединены боковые лопасти, шарнирно закрепляют к кольцу (большему) каркаса лопастных движителей.
Промежуточные лопастные движители могут быть выполнены с меньшим диаметром и установлены в верхнем или нижнем лопастном движителе так, что снаружи их не видно. В таких случаях промежуточные лопастные движители конструируют без боковых лопастей.
Верхний лопастной движитель может иметь вид перевернутой тарелки. Нижний лопастной движитель имеет тарелкообразную форму, т.е. выглядит как зеркально перевернутая вверх дном тарелка. Нижний лопастной движитель конструируется таким же образом, что и верхний лопастной движитель. Радиальные прожилины на верхнем лопастном движителе и нижнем лопастном движителе могут быть установлены под одинаковым углом или под разным углом к плоскости горизонтальных дисков.
Все лопастные движители по отдельности присоединены к реактивным силовым установкам (РСУ). Количество и мощность РСУ зависит от количества лопастных движителей ЛА. РСУ каждого лопастного движителя включает по меньшей мере один воздушный двигатель и ресиверы, соединенные с компрессором или компрессорами. Во время взлета РСУ работают синхронно (с одинаковыми оборотами в минуту), даже с учетом использования РСУ различных мощностей. Каждая РСУ также снабжена встроенным стартер-генератором. Сопла РСУ направлены вниз для увеличения подъемной силы ЛА. Воздушный двигатель РСУ соединен с ресивером и работает при аварийных ситуациях, обеспечивая безопасную посадку ЛА.
Для обеспечения бокового движения (в горизонтальной плоскости) ЛА может быть снабжен по меньшей мере одним лопастным движителем горизонтального движения и воздухозаборниками, сообщающимися посредством ресиверов лопастного движителя горизонтального движения с регулирующими перепускными клапанами. Лопастные движители горизонтального движения могут быть установлены горизонтально между верхним и промежуточным лопастными движителями или между нижним и промежуточными лопастными движителями, или между промежуточными лопастными движителями. Число лопастных движителей горизонтального движения может быть разным. При этом в каждой горизонтальной плоскости можно установить несколько (по меньшей мере два) синхронно работающих внутренних лопастных движителей, одинаковых по мощности, например один - справа от кабины ЛА, а второй - слева от кабины ЛА.
Лопастные движители горизонтального движения обеспечивают движение вперед, и поворот ЛА путем увеличения или уменьшения проходимости воздуха сопла РСУ.
Сопла РСУ между собой могут быть соединены и снабжены перепускными клапанами для регулировки проходимости выхлопных газов сопел. Для улучшения маневренности ЛА можно установить отдельный компрессор с отдельным ресивером и отдельными двумя или с четырьмя выходами в разные стороны, таким образом, чтобы перепускные клапаны открывались при осуществлении поворота ЛА.
Летательный аппарат конструируют так, что бы центр тяжести находился ниже (по высоте), чем центр ЛА. Основной груз размещают в центральной части ЛА, чуть ниже (по высоте) от центра таким образом, чтобы обеспечить устойчивость ЛА.
Для экономии топлива ЛА снабжают электрогенераторами. При необходимости, лопастные движители переключаются на электрогенераторы и вырабатывают электричество, которое передается соответствующим системам ЛА, в том числе автоматам регулирования наклона и выдвижения лопастей. При необходимости выработанная электроэнергия может быть использована для нужд любых лопастных движителей ЛА.
ЛА может быть снабжен кабиной пилота. Кабина может находиться в середине ЛА на уровне лопастных движителей горизонтального движения или над верхним лопастным движителем.
Для обеспечения приземления и стоянки летательного аппарата он может быть снабжен опорами (например, стояночными ножками), которые закрепляют к каркасу нижнего лопастного движителя различными известными способами.
Возможно выполнение еще несколько вариантов исполнения ЛА.
ЛА можно выполнить без промежуточных лопастных движителей. В этом случае ЛА будет содержать два (верхний и нижний) лопастных движителя. Между верхним и нижним лопастными движителями можно также установить лопастные движители горизонтального движения, при этом центр тяжести ЛА должен находиться в центре нижнего лопастного движителя.
Также возможен вариант, в соответствии с которым ЛА выполнен с плоским верхним лопастным движителем, а нижний лопастной движитель имеет тарелкообразную форму. При таком варианте ЛА также может быть снабжен лопастными движителями горизонтального движения, а центр тяжести ЛА должен находиться в центре нижнего лопастного движителя.
Заданную высоту при движении ЛА в горизонтальной плоскости обеспечивает нижний лопастной движитель за счет своей конусности.
Для усиления устойчивости ЛА может содержать крыло равновесия, устанавливаемое горизонтально на каркасе верхнего лопастного движителя таким образом, чтобы оно не мешало поднятию лопастей. Крыло равновесия крепится к вертикальному валу ЛА и закрепляется на каркасе верхнего лопастного движителя посредством шаровых опор. Крыло равновесия регулируется по высоте - при поднятии одной (передний по ходу движения ЛА) части крыла другая (задняя по ходу движения ЛА) его часть опускается, обеспечивая требуемый угол захвата воздуха. При поднятии до вертикального уровня крыло равновесия работает как тормоз. При движении вниз воздух давит сверху на переднюю часть крыла равновесия, и ЛА под углом двигается вверх.
Также равновесие ЛА можно регулировать, если сопло направить вниз и на него установить автомат-регулятор для регулировки угла наклона сопла по горизонтали.
Заявленное изобретение поясняется следующими чертежами.
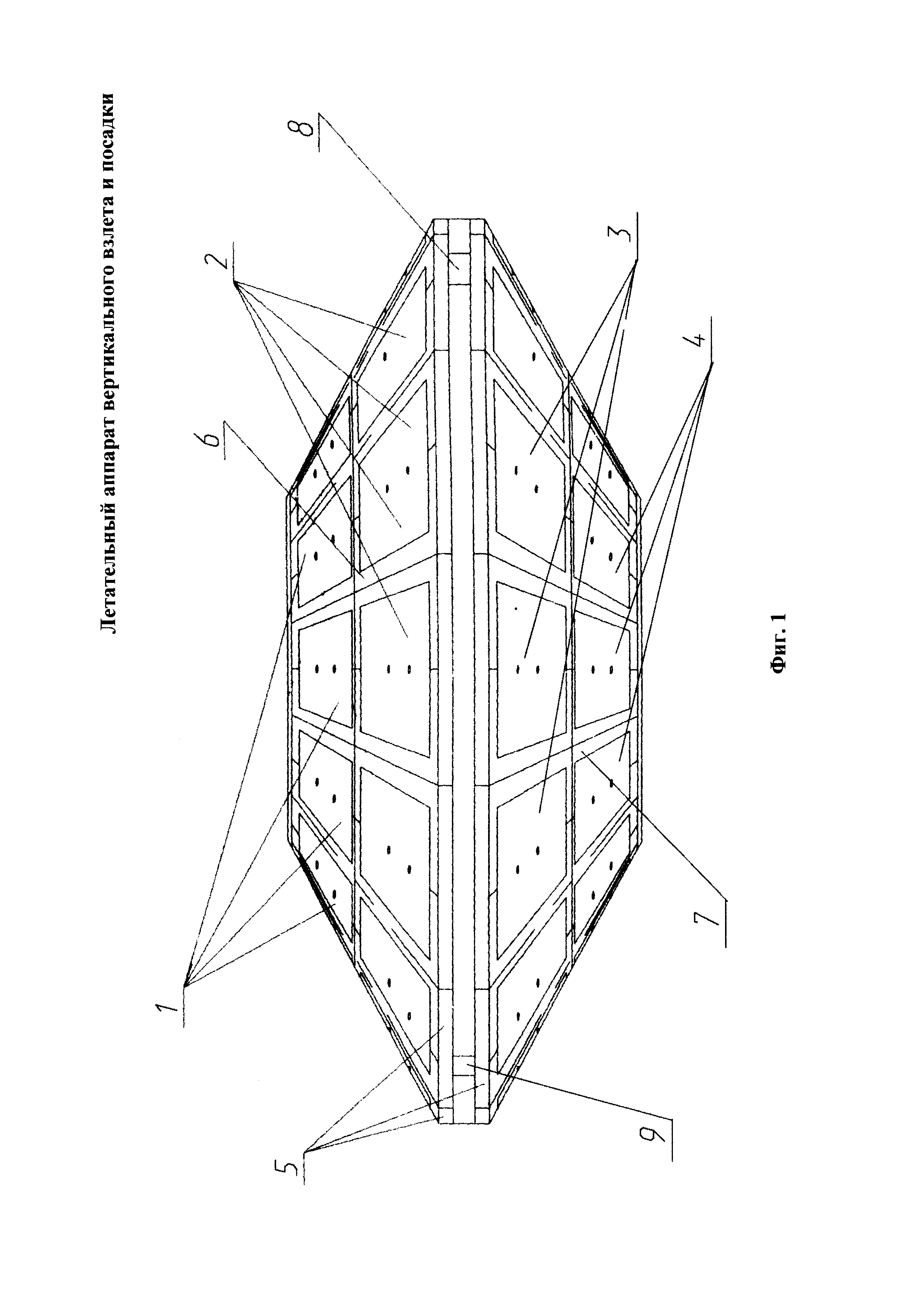
На фигуре 1 показан общий вид летательного аппарата с лопастным движителем горизонтального движения;
на фигуре 2 показан летательный аппарат в разрезе с двумя промежуточными лопастными движителями;
на фигуре 3 показаны лопасти из двух соседних рядов (вид изнутри);
на фигуре 4 показан сегмент каркаса лопастного движителя с двумя соседними рядами лопастей (вид сверху);
на фигуре 5 представлен летательный аппарат (вид сверху);
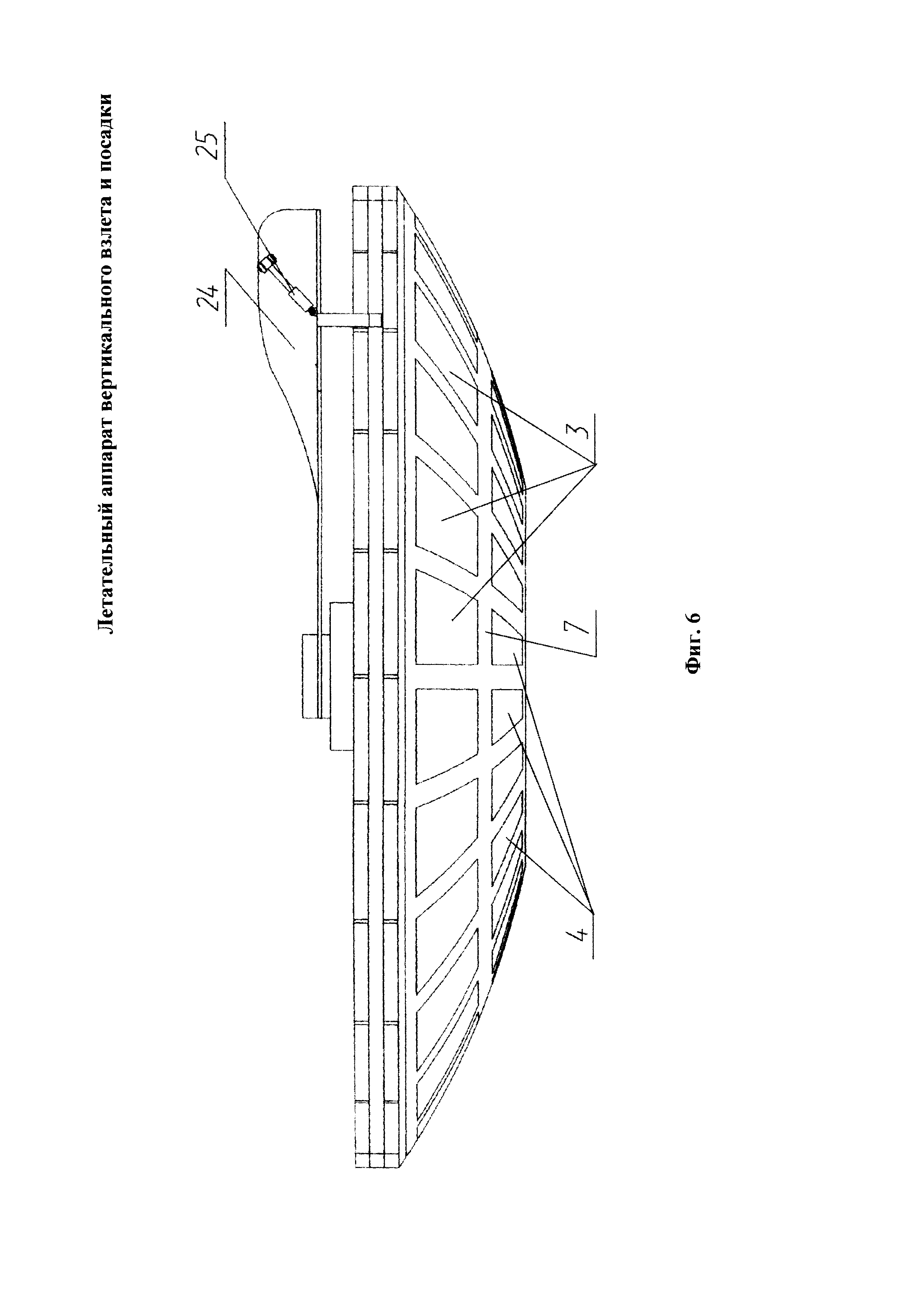
на фигуре 6 показан вариант выполнения летательного аппарата с верхним лопастным движителем плоской формы;
на фигуре 7 показано соединение лопастей, установленных в ярус.
На вышеуказанных фигурах элементы ЛА указаны под следующими позициями:
1 - лопасть одного ряда верхнего лопастного движителя;
2 - лопасть другого ряда верхнего лопастного движителя;
3 - лопасть одного ряда нижнего лопастного движителя;
4 - лопасть другого ряда нижнего лопастного движителя;
5 - боковая лопасть;
6 - каркас верхнего лопастного движителя;
7 - каркас нижнего лопастного движителя;
8 - сопло РСУ;
9 - воздухозаборник лопастного движителя горизонтального движения;
10 - вертикальная ось летательного аппарата;
11 - малый (верхний) диск верхнего лопастного движителя;
12 - малый (нижний) диск нижнего лопастного движителя;
13 - промежуточный лопастной движитель;
14 - стержень;
15 - автомат регулировки выдвижения лопасти;
16 - рычаг автомата регулировки выдвижения лопасти;
17 - автомат регулировки наклона лопасти;
18 - рычаг автомата регулировки наклона лопасти;
19 - автомат регулировки наклона боковой лопасти;
20 - рычаг автомата регулировки наклона боковой лопасти;
21 - шаровая опора;
22 - радиальная прожилина;
23 - большое кольцо каркаса;
24 - крыло равновесия;
25 - шаровая опора крыла равновесия;
26 - малое кольцо каркаса;
27 - промежуточное кольцо каркаса.
Предложенный летательный аппарат вертикального взлета и посадки работает следующим образом.
Запускаются воздушные двигатели реактивных силовых установок ЛА. При наборе летательным аппаратом высоты одновременно открываются лопасти 1, 2 верхнего лопастного движителя, лопасти 3, 4 нижнего лопастного движителя, а также боковые лопасти 5 верхнего и нижнего лопастного движителя. Автоматы 17 регулировки наклона лопастей посредством рычагов 18 поднимают (наклоняют) одну сторону лопастей 1, 2 верхнего лопастного движителя и лопастей 3,4 нижнего лопастного движителя, а другая сторона лопастей 1, 2 верхнего лопастного движителя и 3, 4 нижнего лопастного движителя автоматически опускается так, чтобы нагнетание воздуха произошло сверху и направлялось вниз (внутрь каркасов ЛА). Автоматы 15 регулировки выдвижения лопастей посредством рычагов 16 поднимают стержни 14 для выдвижения лопастей 1, 2 верхнего лопастного движителя и лопастей 3, 4 нижнего лопастного движителя на нужную высоту. Автоматы 19 регулировки наклона боковой лопасти посредством рычагов 20 и автоматы регулировки выдвижения боковых лопастей (на чертежах не показаны) регулируют изменение положения боковых лопастей 5 таким образом, чтобы боковые лопасти 5 нагнетали воздух сверху и направляли вниз.
В случае наличия промежуточных лопастных движителей 13 при наборе ЛА высоты лопасти промежуточных лопастных движителей 13 открываются и нагнетают воздух сверху и направляют вниз. При этом верхний лопастной движитель набирает воздух сверху и подает вниз промежуточным лопастным движителям 13, которые в свою очередь подают воздух нижнему лопастному движителю, который направляет воздух вниз. Выходит воздух (в виде выхлопных газов) через вертикальные РСУ (на чертежах не показаны), увеличивая подъемную силу ЛА. Благодаря синхронной работе всех лопастных движителей ЛА легко поднимается. После того как ЛА оторвался от земли, включаются лопастные движители бокового движения. ЛА одновременно и поднимается и летит по заданному направлению. Заданное направление корректируется перепускными клапанами (на чертежах не показаны).
После набора высоты при боковом движении (движении в горизонтальной плоскости) ЛА лопасти 1, 2 верхнего лопастного движителя, лопасти 3, 4 нижнего лопастного движителя и боковые лопасти 5 могут быть задвинуты (опущены) в исходное положение. При движении горизонтально со снижением лопасти 1, 2 верхнего лопастного движителя и лопасти 3, 4 нижнего лопастного движителя и боковые лопасти 5 открываются так, чтобы встречный ветер, дующий снизу и по ходу движения ЛА, прокручивал лопастные движители, создавал сопротивление для снижения ЛА и вырабатывал электроэнергию.
Для поддержания необходимой высоты верхний лопастной движитель набирает воздух сверху и подает его вниз, поддерживая ЛА на необходимой высоте. При необходимости, подключаются нижний лопастной движитель, а также промежуточный лопастной движитель (или промежуточные лопастные движители, если их несколько), при этом лопастные движители переключаются на электрогенераторы и вырабатывают электричество, которое передается накопителям. Центром управления ЛА постоянно отслеживается работа всех лопастных движителей и их переход с одной на другую функцию (с электрогенераторов на двигатели и обратно), а также регулируется наклон (и/или выдвижение) лопастей на каждом лопастном движителе.
Предложенный ЛА способен совершать аварийную посадку даже с большой высоты, оставаясь невредимым, поскольку каждый лопастной движитель обеспечен по меньшей мере одним воздушным двигателем и отдельным ресивером, которые по отдельности соединены к компрессору или нескольким компрессорам. Воздушные двигатели включаются автоматически при определенной скорости снижения и поддерживают нужную скорость при приземлении, причем двигатели обеспечены отдельной (аварийной) системой управления.
Реферат
Изобретение относится к авиационной технике, а именно к летательным аппаратам (ЛА) вертикального взлета и посадки. Летательный аппарат вертикального взлета и посадки содержит два лопастных движителя, нижний из которых выполнен тарелкообразной формы, а верхний - плоской или тарелкообразной формы. Каждый движитель содержит реактивную силовую установку. Каркас каждого движителя установлен на металлическом диске, связанном с вертикальным валом летательного аппарата, и снабжен лопастями. Лопасти установлены с возможностью изменения своего положения. ЛА может содержать промежуточные лопастные движители, установленные между верхним и нижним движителями и выполненные плоскими или тарелкообразными. Реактивная силовая установка каждого движителя включает воздушный двигатель и ресиверы, соединенные с компрессором. Каркас каждого движителя включает два кольца, одно из которых соединено с диском, а также радиальные прожилины, установленные по периметру каркаса движителя и соединенные с кольцами и лопастями. Достигается повышение надежности и экономичности ЛА, возможность движения ЛА вертикально, горизонтально или с любым наклоном. 13 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Летательный аппарат с двумя воздушными винтами противоположного вращения на вертикальной оси
Комментарии