Летательный аппарат с двумя воздушными винтами противоположного вращения на вертикальной оси - RU2520263C2
Код документа: RU2520263C2
Чертежи















Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к летательному аппарату с двумя воздушными винтами противоположного вращения на вертикальной оси, расположенными снизу перевозимого груза.
Уровень техники
Ранее предлагалось создать летательный аппарат, содержащий летающую платформу, в котором пользовать стоит на платформе, а снизу нее установлен воздушный винт, создающий подъемную силу для отрыва платформы от земли. По окружности платформы проходит поручень, за который пользователь держится, пользователь управляет изменением наклона платформы и, соответственно, направлением движения платформы за счет переноса центра своей тяжести. Подобная летающая платформа была предложена в патенте США 2953321, выданном Артуру Робертсону и соавт. Подобная платформа также предлагалась Карлом Циммерманом в 1940-х и 1950-х годах.
Несмотря на то что основные принципы летающей платформы были изложены уже достаточно давно, вариант, пригодный для серийного производства с более продуманным управлением, так и не был создан.
Раскрытие изобретения
В настоящей заявке, таким образом, используются определенные наработки по практическому решению трудностей и проблем, присущих базовым версиям летающих платформ, предлагавшихся ранее.
По первому аспекту изобретения предлагается летательный аппарат, содержащий, по меньшей мере, один двигатель и два воздушных винта противоположного вращения на вертикальной оси, лопасти которых выполнены с возможностью создания подъемной силы при вращении воздушных винтов двигателем, аппарат оборудован креслом и рукоятками, которые установлены в аппарате над винтами и направлены радиально вовнутрь от внешней окружности воздушных винтов.
Предпочтительно воздушные винты расположены таким образом, чтобы один из параметров воздушных винтов можно было изменять с учетом любых изменений в воздушных потоках, поступающих в каждый из воздушных винтов, таким образом, чтобы во время их использования каждый из воздушных винтов создавал, по существу, одинаковую подъемную силу.
Предпочтительно изменяется шаг лопастей воздушных винтов.
Предпочтительно аппарат содержит два двигателя.
Предпочтительно два двигателя соединены с единым приводным устройством, позволяющим передавать создаваемую тягу от двигателей на воздушные винты.
Предпочтительно каждый из двигателей соединен с приводным устройством через соответствующее одностороннее, сцепление, позволяющее задействовать один двигатель для передачи тяги на приводное устройство без использования другого двигателя.
Предпочтительно рукоятки разнесены вбок в одном направлении от оси вращения воздушных винтов, кресло продольно разнесено в противоположном направлении от оси вращения воздушных винтов.
Предпочтительно перемещение, по меньшей мере, части рукояток позволяет управлять рысканием аппарата.
Предпочтительно поворот рукояток относительно аппарата управляет рысканием аппарата.
По одному из вариантов осуществления аппарат содержит хвостовой винт, рукоятки позволяют управлять хвостовым винтом для управления рысканием аппарата.
Предпочтительно рукоятки позволяют управлять угловой скоростью вращения хвостового винта.
По другому варианту осуществления рукоятки позволяют изменять один из параметров воздушных винтов противоположного вращения для создания реакции от крутящего момента, используемой для рыскания аппарата.
Предпочтительно рукоятки управляют разницей между общим шагом лопастей каждого воздушного винта противоположного вращения для создания реакции от крутящего момента.
Предпочтительно для управления рысканием аппарата рукоятки управляют общим шагом лопастей только одного воздушного винта.
Как вариант или как дополнение, для управления рысканием аппарата рукоятки могут управлять относительной угловой скоростью воздушных винтов.
Предпочтительно аппарат содержит, по меньшей мере, один сектор газа, перемещение которого обеспечивает управление скоростью двигателя(ей).
Предпочтительно рукоятки содержат вращающуюся ручку, поворот которой обеспечивает управление общим шагом лопастей, по меньшей мере, одного из воздушных винтов для управления создаваемой подъемной силой.
Предпочтительно аппарат содержит механизм управления общим шагом, позволяющий изменять общий шаг лопастей воздушных винтов, механизм содержит автомат перекоса, связанный с лопастями воздушных винтов, перемещение автомата перекоса относительно лопастей воздушных винтов обеспечивает вращение лопастей воздушных винтов вокруг их продольных осей для изменения шага лопастей воздушных винтов.
Предпочтительно автомат перекоса выполнен с возможностью линейного перемещения в направлении, параллельном оси вращения воздушных винтов, подобное линейное движение преобразуется во вращательное движение лопастей за счет рычажных механизмов, связывающих автомат перекоса с лопастями.
Предпочтительно каждый воздушный винт сопряжен с соответствующим автоматом перекоса.
По одному из вариантов осуществления используется передающая тарелка автомата перекоса для передачи движения с одной тарелки автомата перекоса на другую тарелку автомата перекоса.
Предпочтительно имеется исполнительное устройство, обеспечивающее движение одной из тарелок автомата перекоса, движение упомянутой тарелки автомата перекоса передается на другую тарелку автомата перекоса передающей тарелкой автомата перекоса таким образом, чтобы общий шаг лопастей обоих воздушных винтов управлялся одновременно одним исполнительным устройством.
По другому варианту осуществления движение каждой тарелки автомата перекоса управляется соответствующим исполнительным устройством таким образом, чтобы общий шаг лопастей одного воздушного винта мог управляться отдельно от общего шага лопастей другого воздушного винта.
Предпочтительно внешняя юбка проходит вокруг воздушных винтов.
Предпочтительно юбка содержит множество вертикально разнесенных между собой колец, зазоры между кольцами выполняют роль воздуховодов для подачи воздуха на воздушные винты во время их использования.
Предпочтительно поперечное сечение колец имеет форму аэродинамического профиля.
Предпочтительно основание аппарата содержит множество полозьев, на которых аппарат установлен, когда он не используется для полета.
Предпочтительно в центре основания аппарата установлена втулка, позволяющая перемещать аппарат, когда он не используется для полета.
Предпочтительно втулка содержит шар, свободно вращающийся в гнезде, расположенном в основании аппарата.
По второму аспекту изобретения предлагается летательный аппарат, содержащий, по меньшей мере, один двигатель и два воздушных винта противоположного вращения на вертикальной оси, лопасти которых выполнены с возможностью создания подъемной силы при вращении воздушных винтов двигателем, аппарат оборудован подвижными рукоятками, которые установлены в аппарате над винтами, перемещение рукояток относительно аппарата позволяет, во время использования, управлять рысканием аппарата.
Предпочтительно поворот рукояток относительно рамы аппарата позволяет, во время использования, управлять рысканием аппарата.
По одному из вариантов осуществления аппарат содержит хвостовой винт, рукоятки позволяют управлять хвостовым винтом для управления рысканием аппарата.
Предпочтительно рукоятки позволяют управлять угловой скоростью вращения хвостового винта.
По другому варианту осуществления рукоятки позволяют изменять один из параметров воздушных винтов противоположного вращения для создания реакции от крутящего момента для рыскания аппарата.
Предпочтительно рукоятки изменяют разницу между общим шагом лопастей каждого воздушного винта противоположного вращения для создания реакции от крутящего момента.
Предпочтительно для управления рысканием аппарата рукоятки управляют общим шагом лопастей только одного воздушного винта.
Как вариант или как дополнение, для управления рысканием аппарата рукоятки могут управлять относительной угловой скоростью вращения воздушных винтов.
Предпочтительно рукоятки содержат вращающуюся ручку, поворот которой обеспечивает управление общим шагом лопастей, по меньшей мере, одного из воздушных винтов для управления создаваемой подъемной силой.
Предпочтительно аппарат содержит механизм управления общим шагом, позволяющий изменять общий шаг лопастей воздушных винтов, механизм содержит автомат перекоса, связанный с лопастями воздушных винтов, перемещение автомата перекоса относительно лопастей воздушных винтов обеспечивает вращение лопастей воздушных винтов вокруг их продольных осей для изменения шага лопастей воздушных винтов.
Предпочтительно автомат перекоса выполнен с возможностью линейного перемещения в направлении, параллельном оси вращения воздушных винтов, подобное линейное движение преобразуется во вращательное движение лопастей за счет рычажных механизмов, связывающих автомат перекоса с лопастями.
Предпочтительно каждый воздушный винт сопряжен с соответствующим автоматом перекоса.
По одному из вариантов осуществления используется передающая тарелка автомата перекоса для передачи движения с одной тарелки автомата перекоса на другую тарелку автомат перекоса.
Предпочтительно используется исполнительное устройство для обеспечения движения одной из тарелок автомата перекоса, движение упомянутой тарелки автомата перекоса передается на другую тарелку автомата перекоса передающей тарелкой автомата перекоса таким образом, чтобы общий шаг лопастей обоих воздушных винтов управлялся одновременно одним исполнительным устройством.
По другому варианту осуществления движение каждой тарелки автомата перекоса управляется соответствующим исполнительным устройством таким образом, чтобы общий шаг лопастей одного воздушного винта мог управляться отдельно от общего шага лопастей другого воздушного винта.
По третьему аспекту изобретения предлагается летательный аппарат, содержащий, по меньшей мере, один двигатель и два воздушных винта противоположного вращения на вертикальной оси, лопасти которых выполнены с возможностью создания подъемной силы при вращении воздушных винтов двигателем, аппарат оборудован подвижными рукоятками, которые установлены в аппарате над винтами, аппарат дополнительно оборудован механизмом управления общим шагом для совместного управления шагом лопастей воздушных винтов, механизм управления общим шагом управляется рукоятками.
Предпочтительно рукоятки содержат вращающуюся ручку, поворот которой обеспечивает управление общим шагом лопастей, по меньшей мере, одного из воздушных винтов для управления создаваемой подъемной силой.
Предпочтительно механизм управления общим шагом содержит автомат перекоса связанный с лопастями воздушных винтов, перемещение автомата перекоса относительно лопастей воздушных винтов приводит к вращению лопастей воздушных винтов вокруг их продольных осей для изменения шага лопастей воздушных винтов.
Предпочтительно автомат перекоса выполнен с возможностью линейного перемещения и направлении, параллельном оси вращения воздушного(ых) винта(ов), подобное линейное движение преобразуется во вращательное движение лопастей за счет рычажных механизмов, связывающих автомат перекоса с лопастями.
Предпочтительно каждый воздушный винт сопряжен с соответствующим автоматом перекоса.
По одному из вариантов осуществления используется передающая тарелка автомата перекоса для передачи движения с одной тарелки автомата перекоса на другую тарелку автомата перекоса.
Предпочтительно имеется исполнительное устройство для обеспечения движения одной из тарелок автомата перекоса, движение упомянутой тарелки автомата перекоса передается на другую тарелку автомата перекоса передающей тарелкой автомата перекоса таким образом, чтобы общий шаг лопастей обоих воздушных винтов управлялся одновременно одним исполнительным устройством.
По другому варианту осуществления движение каждой тарелки автомата перекоса управляется соответствующим исполнительным устройством таким образом, чтобы общий шаг лопастей одного воздушного винта мог управляться отдельно от общего шага лопастей другого воздушного винта.
По четвертому аспекту изобретения предлагается летательный аппарат, содержащий, по меньшей мере, один двигатель и два воздушных винта противоположного вращения на вертикальной оси, лопасти которых выполнены с возможностью создания подъемной силы при вращении воздушных винтов двигателем, аппарат содержит механизм управления рысканием, позволяющий изменять один из параметров, по меньшей мере, одного воздушного винта по сравнению с другим винтом для создания реакции от крутящего момента для рыскания аппарата.
Предпочтительно механизм управления рысканием управляет разницей между общим шагом лопастей каждого воздушного винта противоположного вращения для создания реакции от крутящего момента.
Предпочтительно для управления рысканием аппарата механизм управления рысканием управляет общим шагом только одного воздушного винта.
Как вариант или как дополнение для управления рысканием аппарата механизм управления рысканием управляет относительной угловой скоростью вращения воздушных винтов.
Предпочтительно механизм управления рысканием содержит механизм управления общим шагом, позволяющий изменять общий шаг лопастей воздушных винтов, механизм содержит автомат перекоса, связанный с лопастями воздушных винтов, перемещение автомата перекоса относительно лопастей воздушных винтов обеспечивает вращение лопастей воздушных винтов вокруг их продольных осей для изменения шага лопастей воздушных винтов.
Предпочтительно автомат перекоса выполнен с возможностью линейного перемещения в направлении, параллельном оси вращения воздушных винтов, подобное линейное движение преобразуется во вращательное движение лопастей за счет рычажных механизмов, связывающих автомат перекоса с лопастями.
Предпочтительно каждый воздушный винт сопряжен с соответствующим автоматом перекоса.
Предпочтительно перемещение каждого автомата перекоса управляется соответствующим исполнительным устройством таким образом, чтобы общий шаг лопастей одного воздушного винта мог управляться отдельно от общего шага лопастей другого воздушного винта.
По пятому аспекту изобретения предлагается летательный аппарат, содержащий, по меньшей мере, один двигатель и два воздушных винта противоположного вращения на вертикальной оси, лопасти которых выполнены с возможностью создания подъемной силы при вращении воздушных винтов двигателем, аппарат оборудован креслом и рукоятками, расположенными над воздушными винтами, а также втулкой, которая выступает снизу воздушных винтов и снизу самой нижней части аппарата, втулка частично поддерживает аппарат в наклонном положении, когда он не используется, во время взлета пользователь может управлять аппаратом таким образом, чтобы аппарат частично опирался на втулку и частично удерживался подъемной силой, создаваемой воздушными винтами, так, чтобы аппарат находился в ненаклонном положении.
По шестому аспекту изобретения предлагается летательный аппарат, содержащий, по меньшей мере, один двигатель и два воздушных винта противоположного вращения на вертикальной оси, лопасти которых выполнены с возможностью создания подъемной силы при вращении воздушных винтов двигателем, над воздушными винтами расположена несущая область, каждый воздушный винт оснащен соответствующим механизмом управления шагом лопастей, аппарат дополнительно оборудован контроллером, механизмы управления шагом лопастей и контроллер выполнены таким образом, чтобы шаг лопастей одного воздушного винта мог управляться отдельно от шага лопастей другого воздушного винта.
Предпочтительно механизмы управления шагом лопастей и контроллер выполнены таким образом, чтобы и общий, и циклический шаг лопастей одного воздушного винта могли управляться отдельно от общего и циклического шага лопастей другого воздушного винта.
Предпочтительно, по меньшей мере, один из механизмов управления шагом лопастей запускается сервоприводом, управляемым контроллером.
Наиболее предпочтительно каждый механизм управления шагом лопастей управляется соответствующим сервоприводом.
Предпочтительно каждый механизм управления шагом лопастей оснащен комплектом собственных сервоприводов, по одному сервоприводу для каждой лопасти воздушного винта.
Предпочтительно каждый воздушный винт приводится в действие соответствующим приводным валом, приводные валы являются соосными, по меньшей мере, один из приводных валов является пустотелым таким образом, чтобы внутри этого приводного вала помещался, по меньшей мере, один механизм управления шагом лопастей.
По седьмому аспекту изобретения предлагается летательный аппарат, содержащий, по меньшей мере, один двигатель и два воздушных винта противоположного вращения на вертикальной оси, лопасти которых выполнены с возможностью создания подъемной силы при вращении винтов двигателем, над воздушными винтами установлен несущий контейнер.
Предпочтительно несущий контейнер продолговатый и проходит вдоль продольной оси аппарата, ширина контейнера меньше, чем ширина аппарата.
Несущий контейнер может содержать носилки для перевозки раненых.
Может использоваться узел нагнетающего вентилятора с крыльчаткой, направленной назад, вращающейся вокруг оси, проходящей перпендикулярно вертикальной оси вращения воздушных винтов, и выполненный с возможностью создания дополнительной тяги при использовании направленной назад крыльчатки.
Может использоваться, по меньшей мере, один подвижно установленный аэродинамический профиль, угол наклона которого относительно аппарата может регулироваться.
Предпочтительно подвижно установленный аэродинамический профиль предназначен для вращения вокруг горизонтальной оси, проходящей поперечно аппарату.
Предпочтительно имеется множество подвижных аэродинамических профилей.
Предпочтительно первый комплект подвижных аэродинамических профилей расположен спереди аппарата, а второй комплект - сзади аппарата.
По восьмому аспекту изобретения предлагается летательный аппарат, содержащий, по меньшей мере, один двигатель и два воздушных винта противоположного вращения на вертикальной оси, лопасти которых выполнены с возможностью создания подъемной силы при вращении воздушных винтов двигателем, несущая область расположена над воздушными винтами, также имеется контроллер, содержащий множество гироскопов, выполненных с возможностью формирования сигналов, указывающих пространственное положение аппарата, контроллер позволяет обрабатывать сигналы и, в конечном счете, управлять аппаратом для удержания аппарата в заданном пространственном положении.
Другие аспекты настоящего изобретения могут включать в себя любые комбинации из упоминаемых здесь признаков с учетом упоминаемых здесь ограничений.
Краткое описание чертежей
Настоящее изобретение может быть практически реализовано различными способами, а представленное ниже описание вариантов его осуществления дано исключительно в качестве примера, со ссылкой на прилагаемые чертежи, где
на фиг.1 представлен вид в перспективе спереди летательного аппарата по настоящему изобретению;
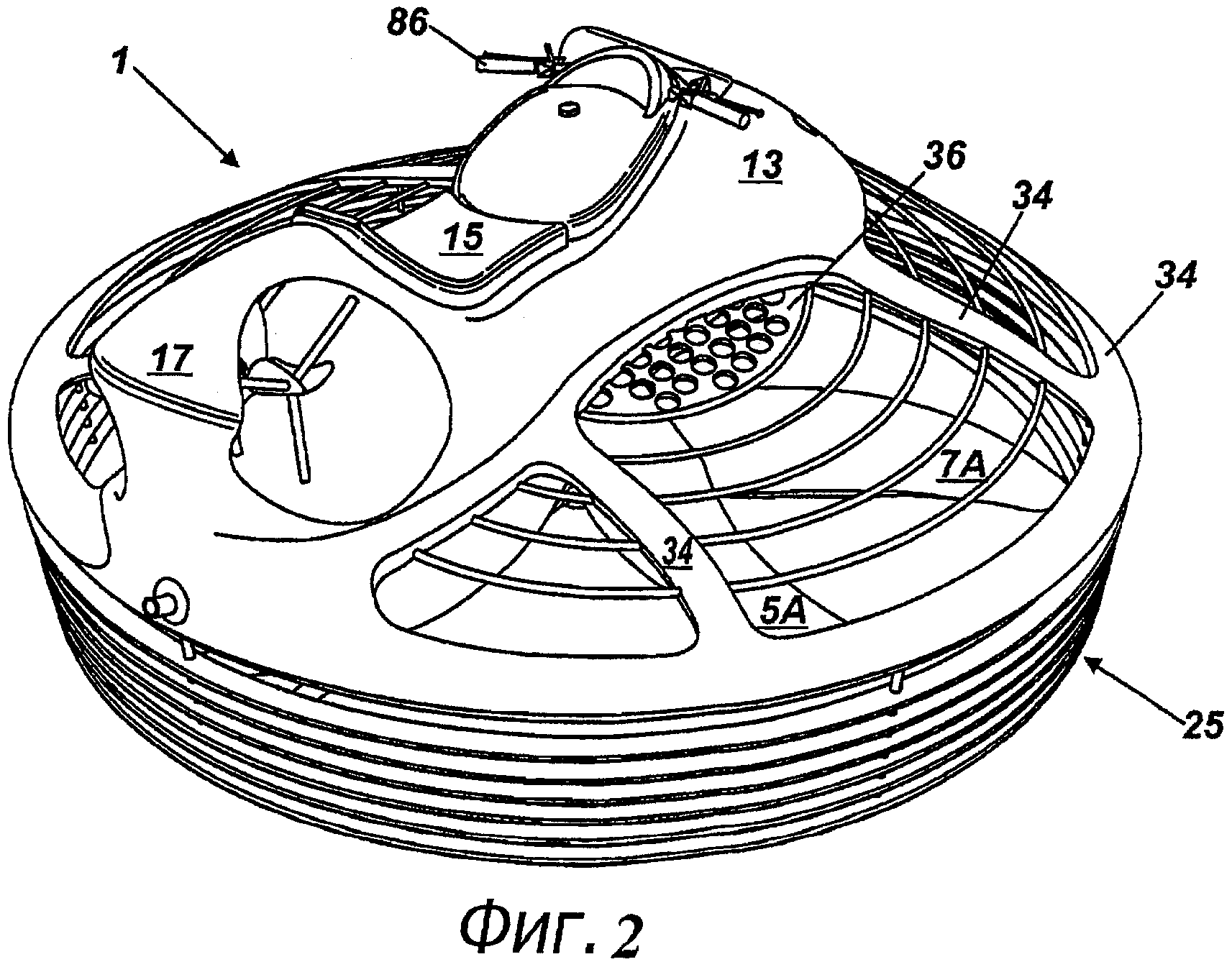
на фиг.2 представлен вид в перспективе сзади летательного аппарата по фиг.1;
на фиг.3 представлен вид спереди летательного аппарата по фигурам 1 и 2;
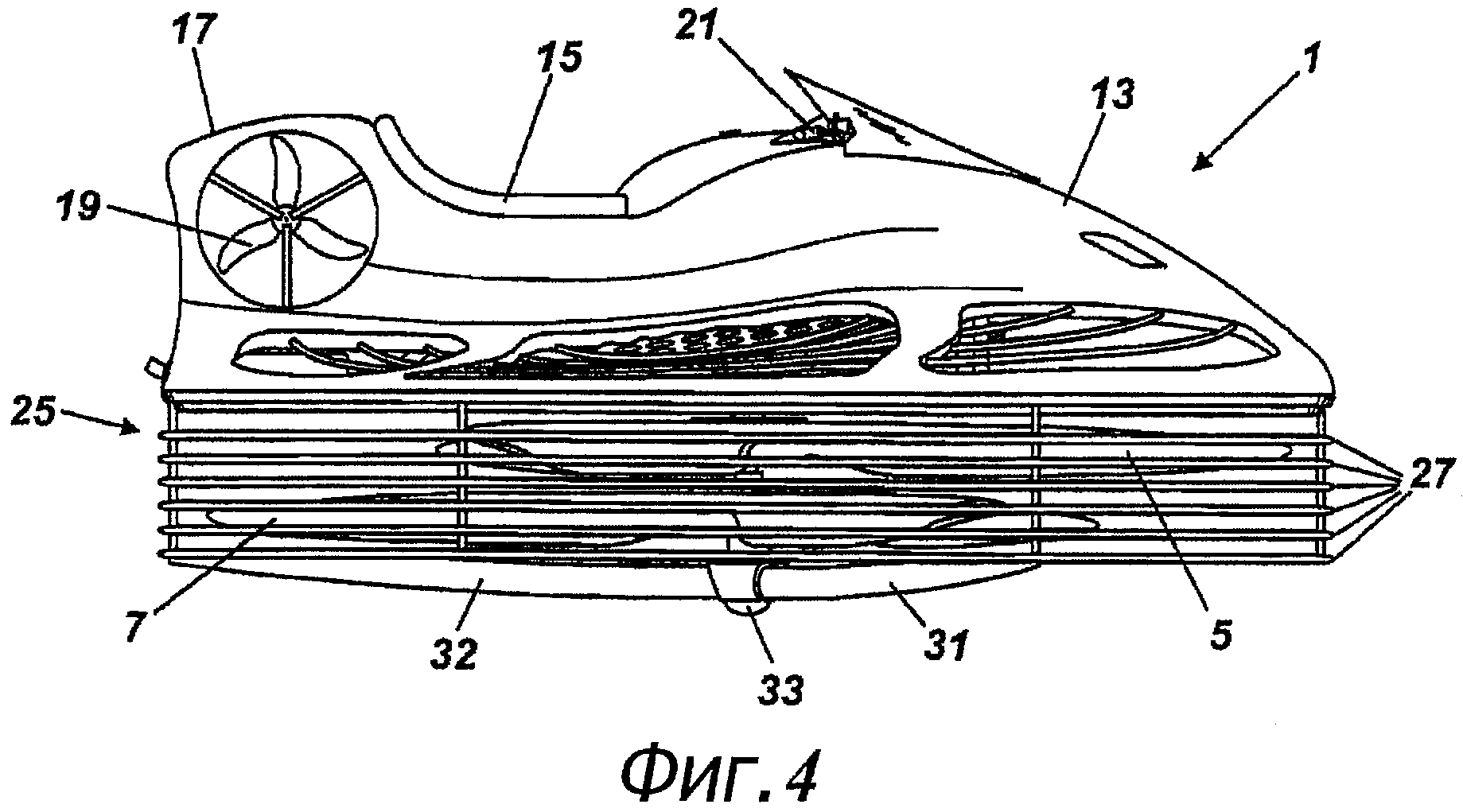
на фиг.4 представлен вид сбоку летательного аппарата по фигурам с 1 по 3;
на фиг.5 представлен вид в перспективе сверху и спереди летательного аппарата по фигурам с 1 по 4 для большей наглядности без корпуса и элементов управления;
на фиг.6 представлен более детализированный вид в перспективе спереди и сверху летательного аппарата по фигурам с 1 по 5 без части корпуса аппарата;
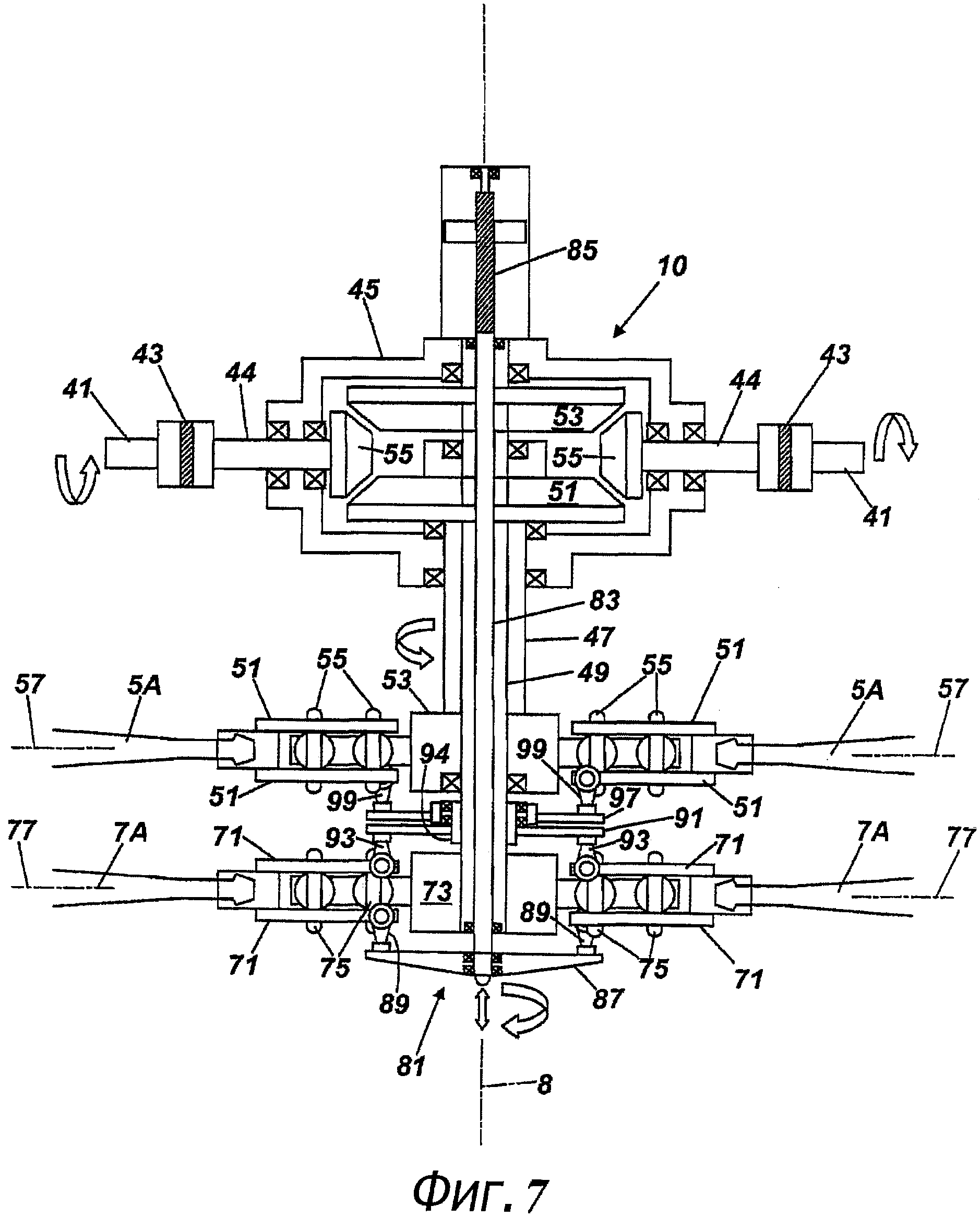
на фиг.7 представлен вид в разрезе сбоку механизма управления общим шагом, используемого в летательном аппарате по настоящему изобретению;
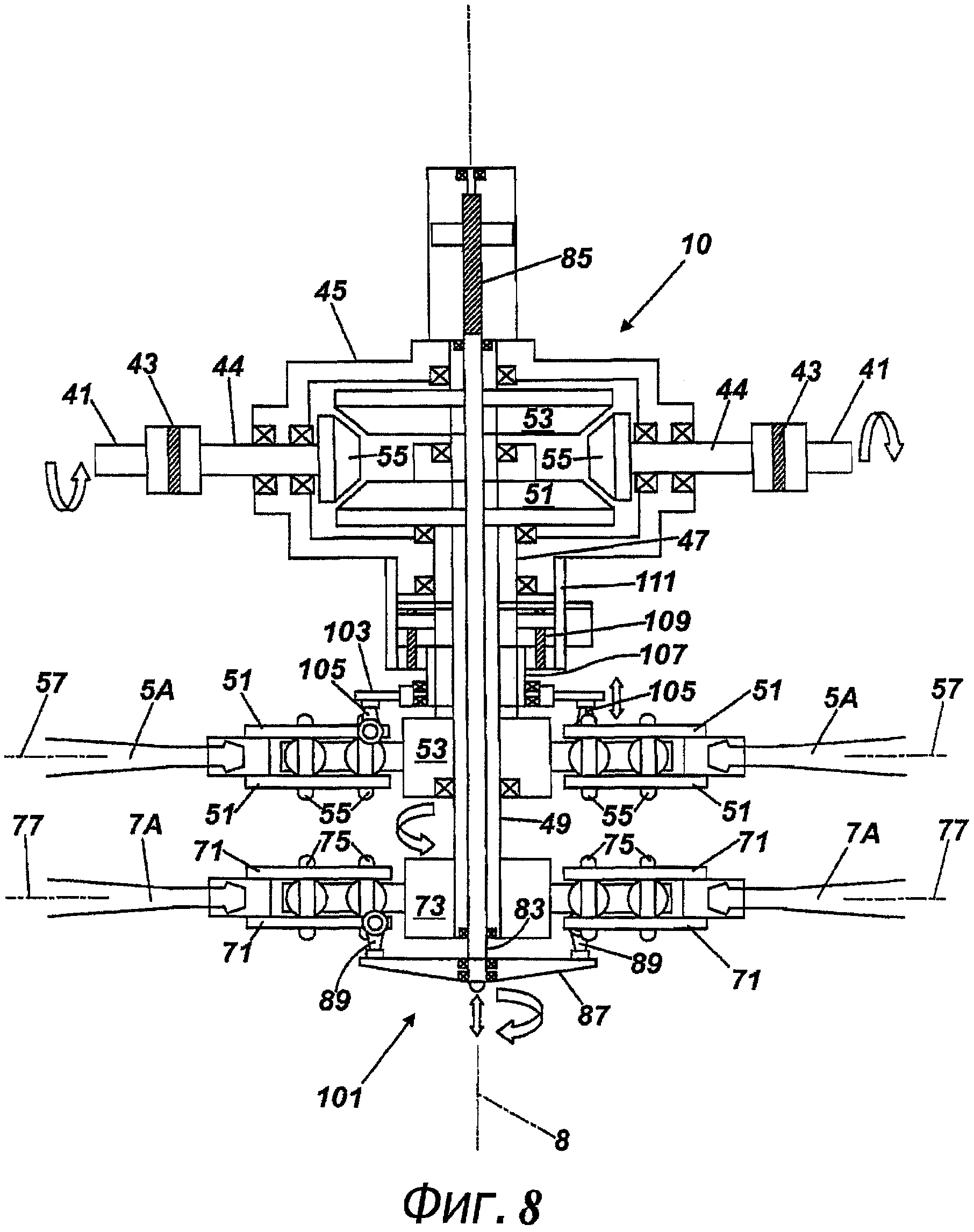
на фиг.8 представлен вид в разрезе сбоку другого механизма управления общим шагом, используемого в летательном аппарате по настоящему изобретению;
на фиг.9 представлен вид в плане другого варианта осуществления летательного аппарата по настоящему изобретению;
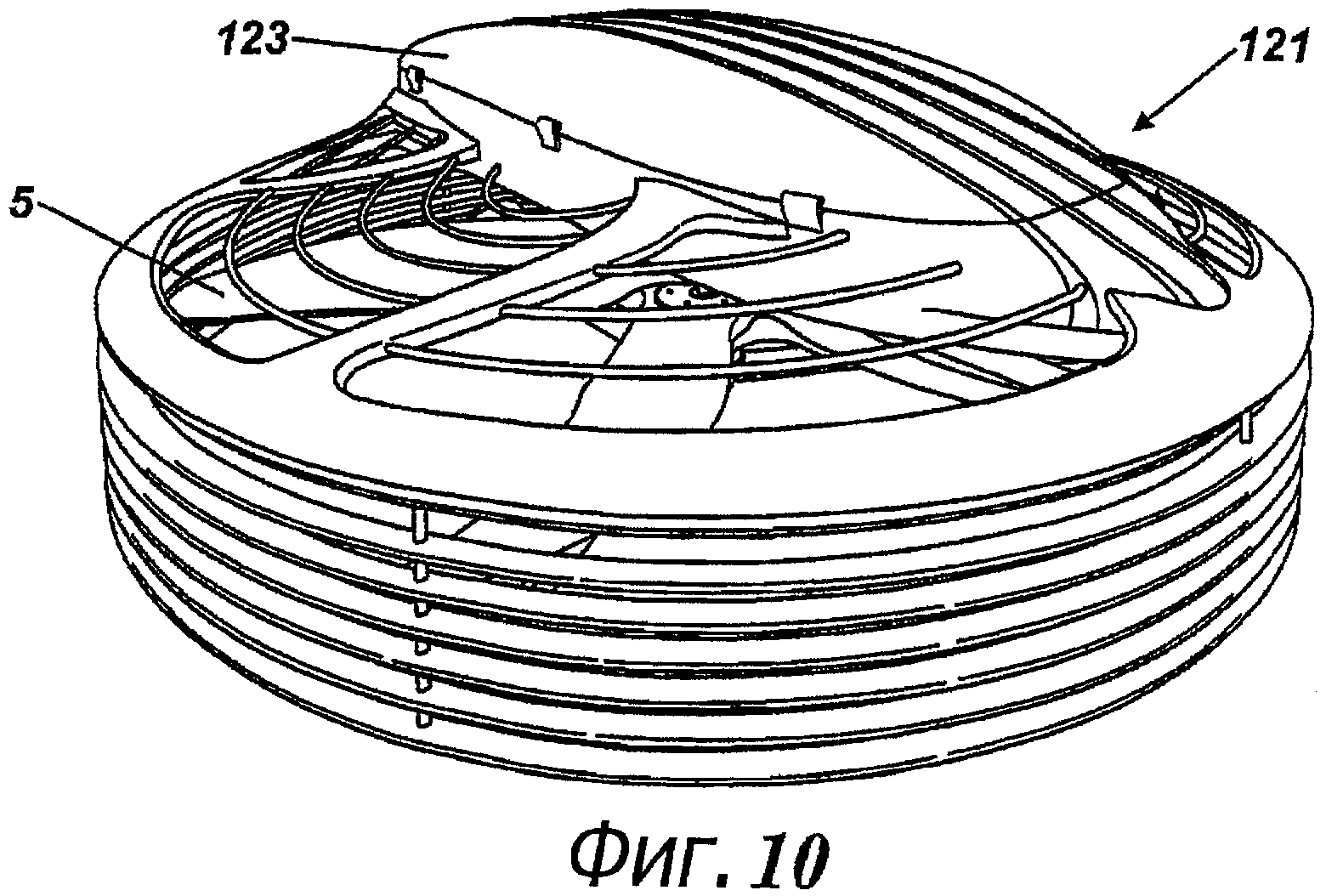
на фиг.10 представлен вид в перспективе спереди и с одной стороны летательного аппарата по фиг.10;
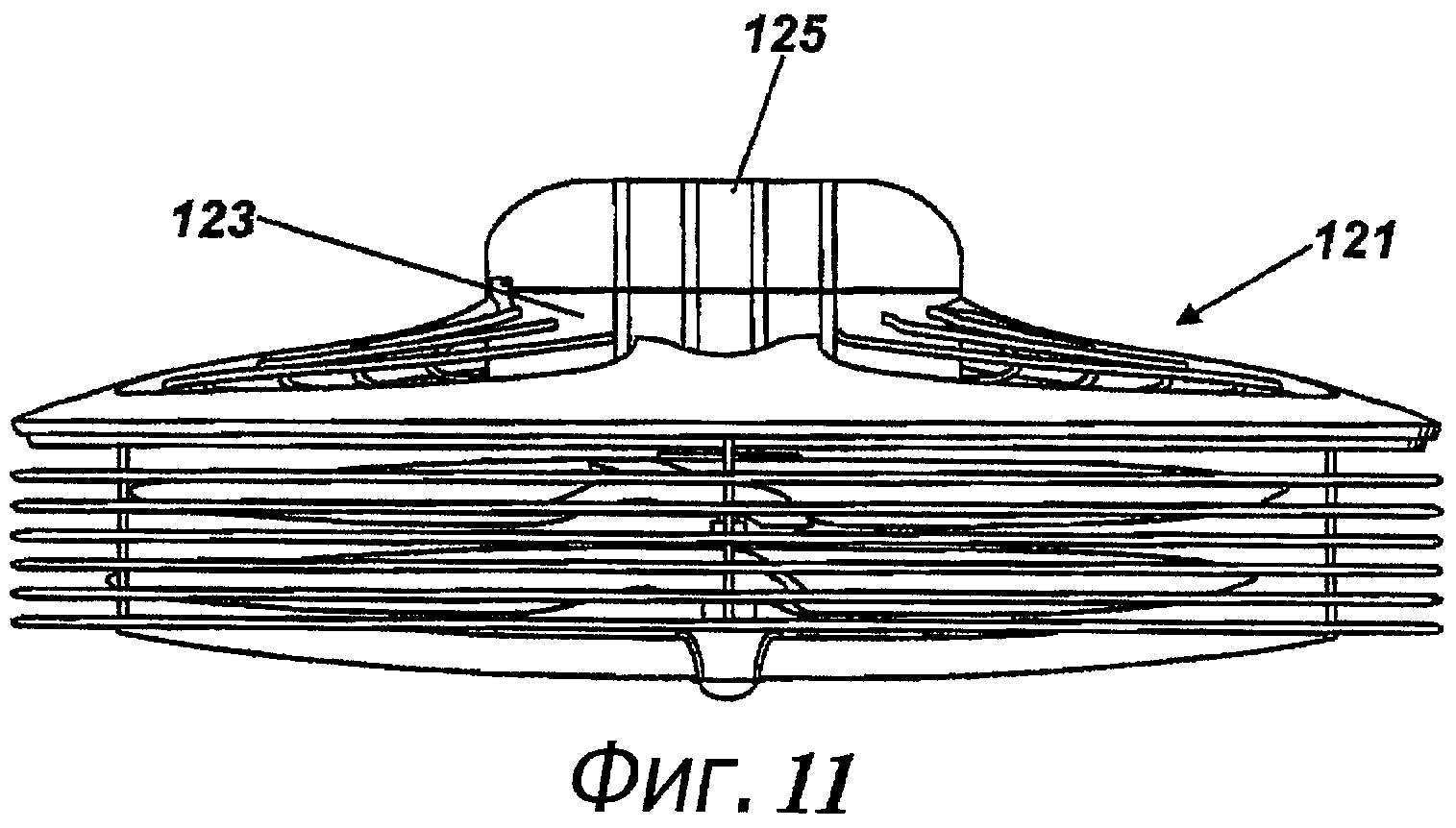
на фиг.11 представлен вид спереди летательного аппарата по фигурам 9 и 10;
на фиг.12 представлен вид сбоку летательного аппарата по фигурам с 9 по 11;
на фиг.13 представлен вид спереди и сбоку летательного аппарата по фигурам с 9 по 12 с частично открытым корпусом аппарата;
на фиг.14 представлен вид в плане дополнительного варианта осуществления летательного аппарата по настоящему изобретению;
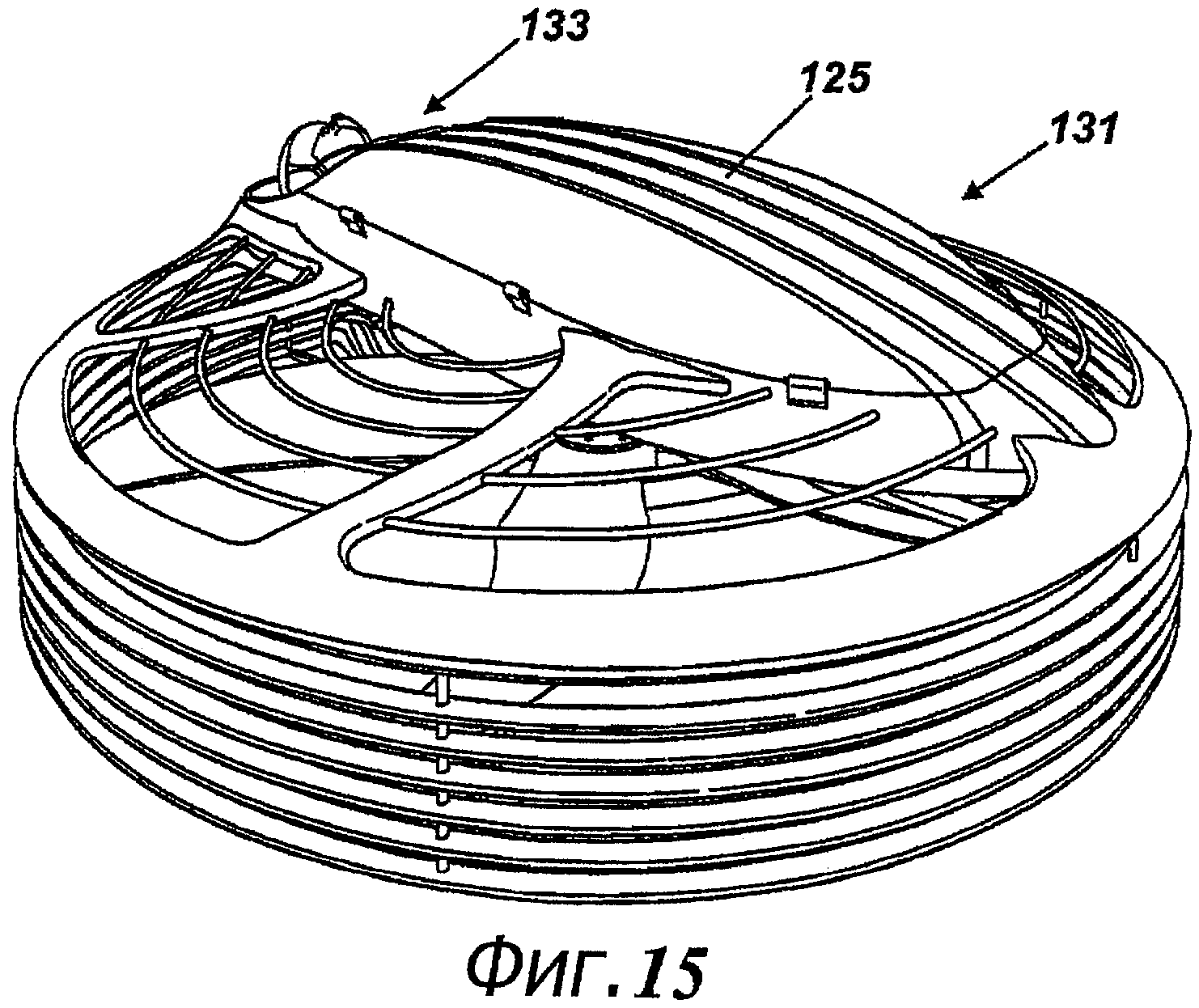
на фиг.15 представлен вид в перспективе спереди и с одной стороны летательного аппарата по фиг.14;
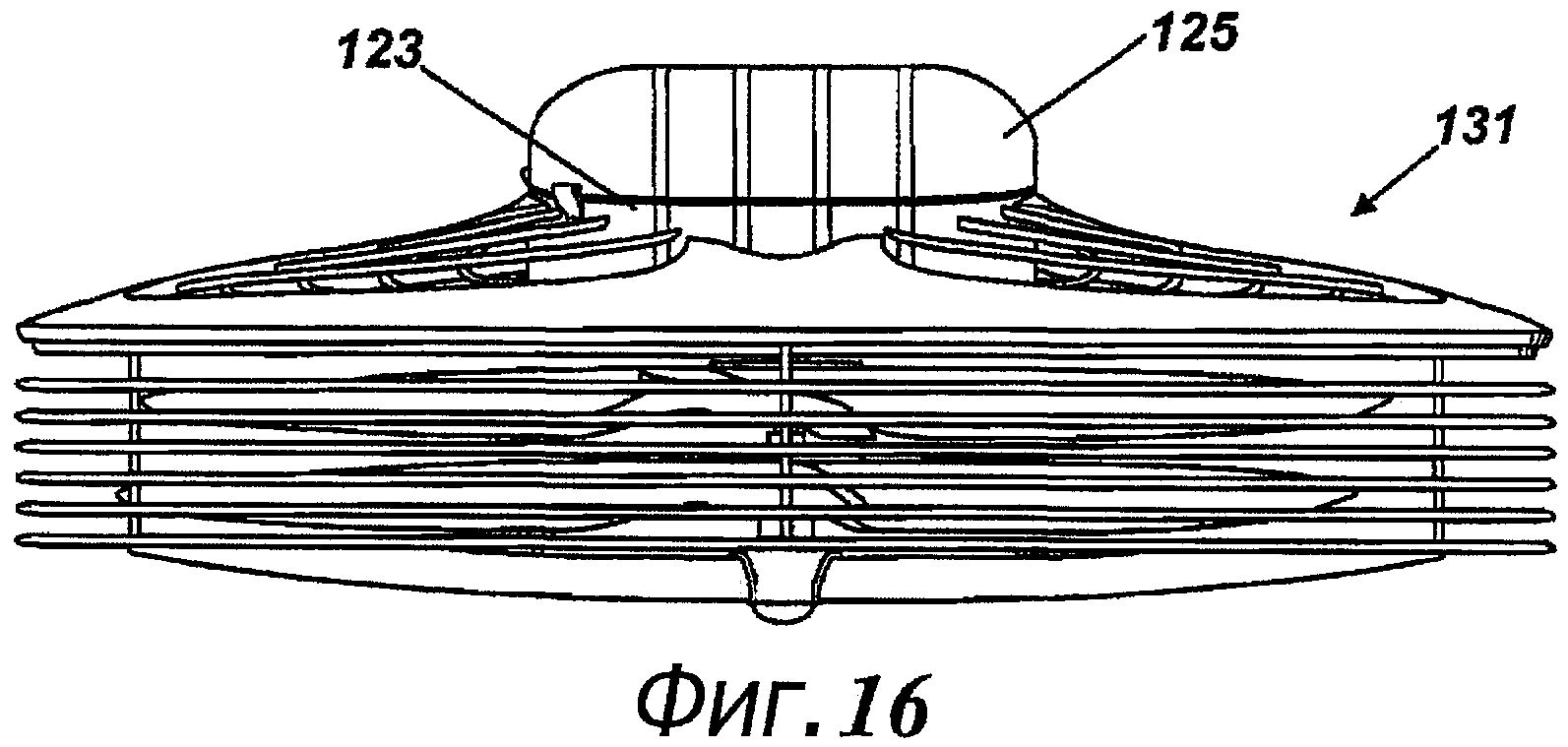
на фиг.16 представлен вид спереди летательного аппарата по фигурам 14 и 15;
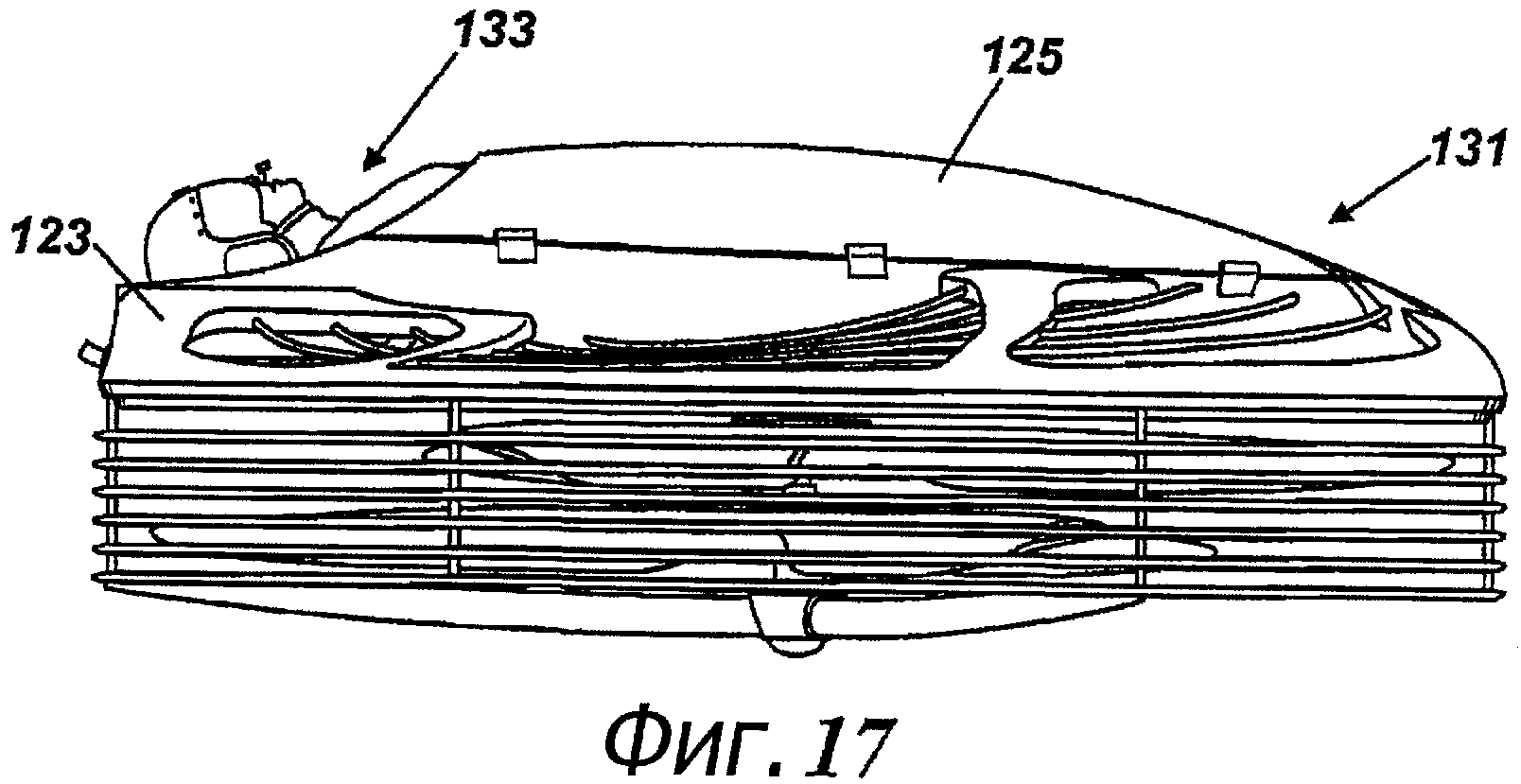
на фиг.17 представлен вид сбоку летательного аппарата по фигурам с 14 по 16;
на фиг.18 представлен вид в разрезе сбоку дополнительного механизма управления общим шагом, используемого в летательном аппарате по настоящему изобретению;
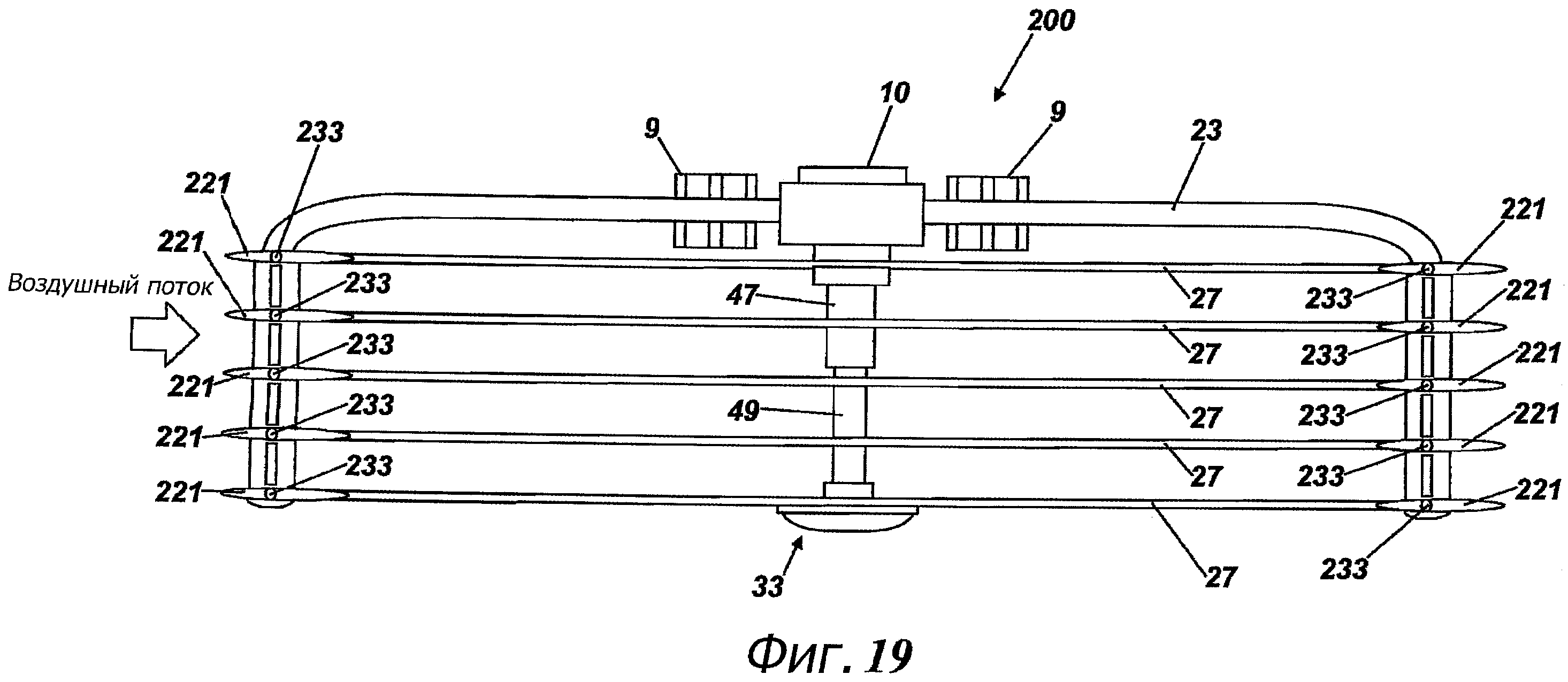
на фиг.19 представлен вид сбоку модифицированного летательного аппарата по настоящему изобретению, для большей наглядности часть деталей аппарата не показана, а другие детали аппарата находятся в первом положении;
на фиг.20 представлен вид спереди модифицированного летательного аппарата по фиг.19;
на фиг.21 представлен вид в плане модифицированного летательного аппарата по фигурам 19 и 20;
на фиг.22 представлен вид сбоку модифицированного летательного аппарата по фигурам с 19 по 21, часть деталей аппарата находится во втором положении;
на фиг.23 представлен укрупненный вид сбоку части модифицированного летательного аппарата по фигурам с 19 по 22, часть деталей аппарата находится в первом положении;
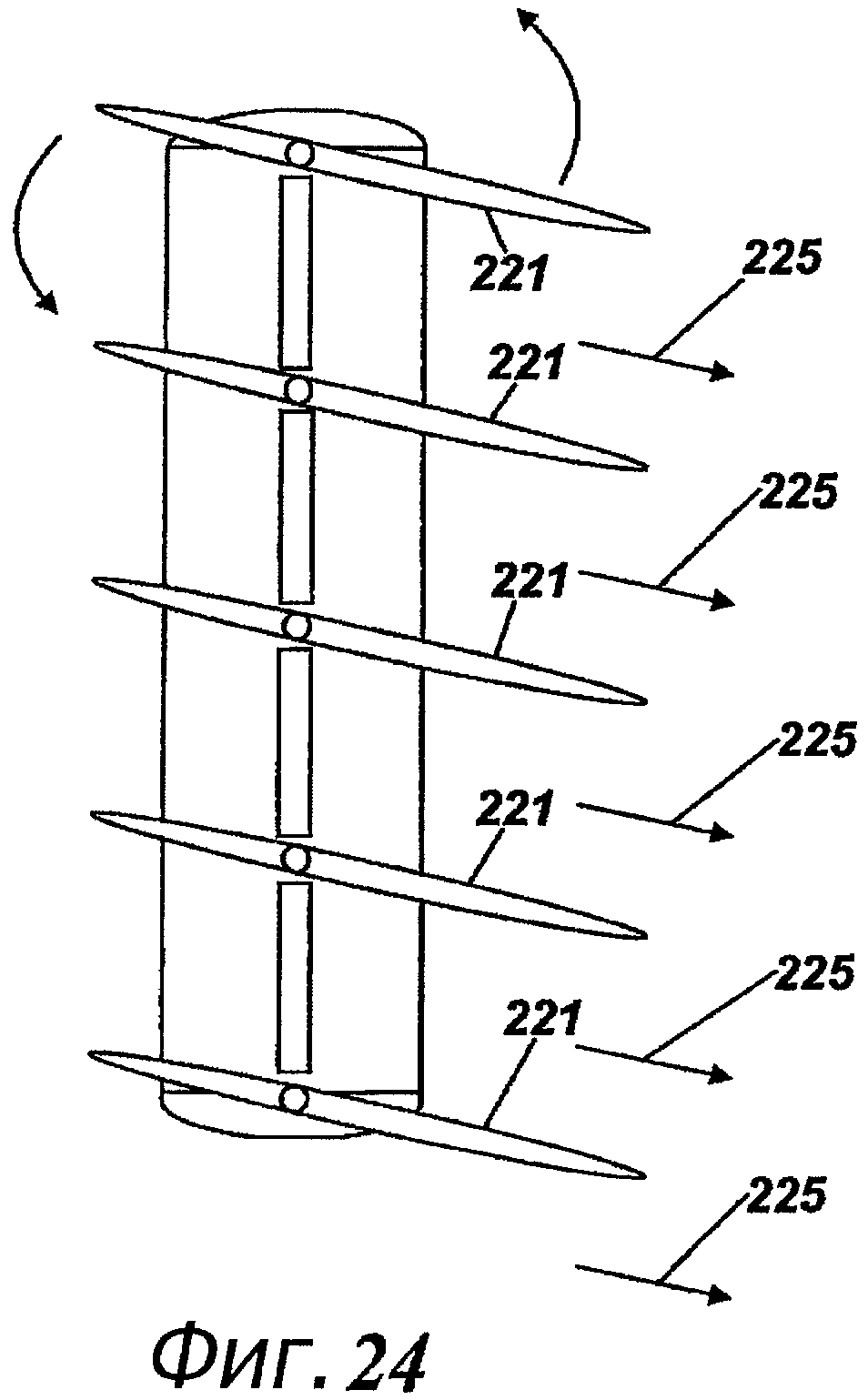
на фиг.24 представлен вид по фиг.23, но часть деталей аппарата находится во втором положении;
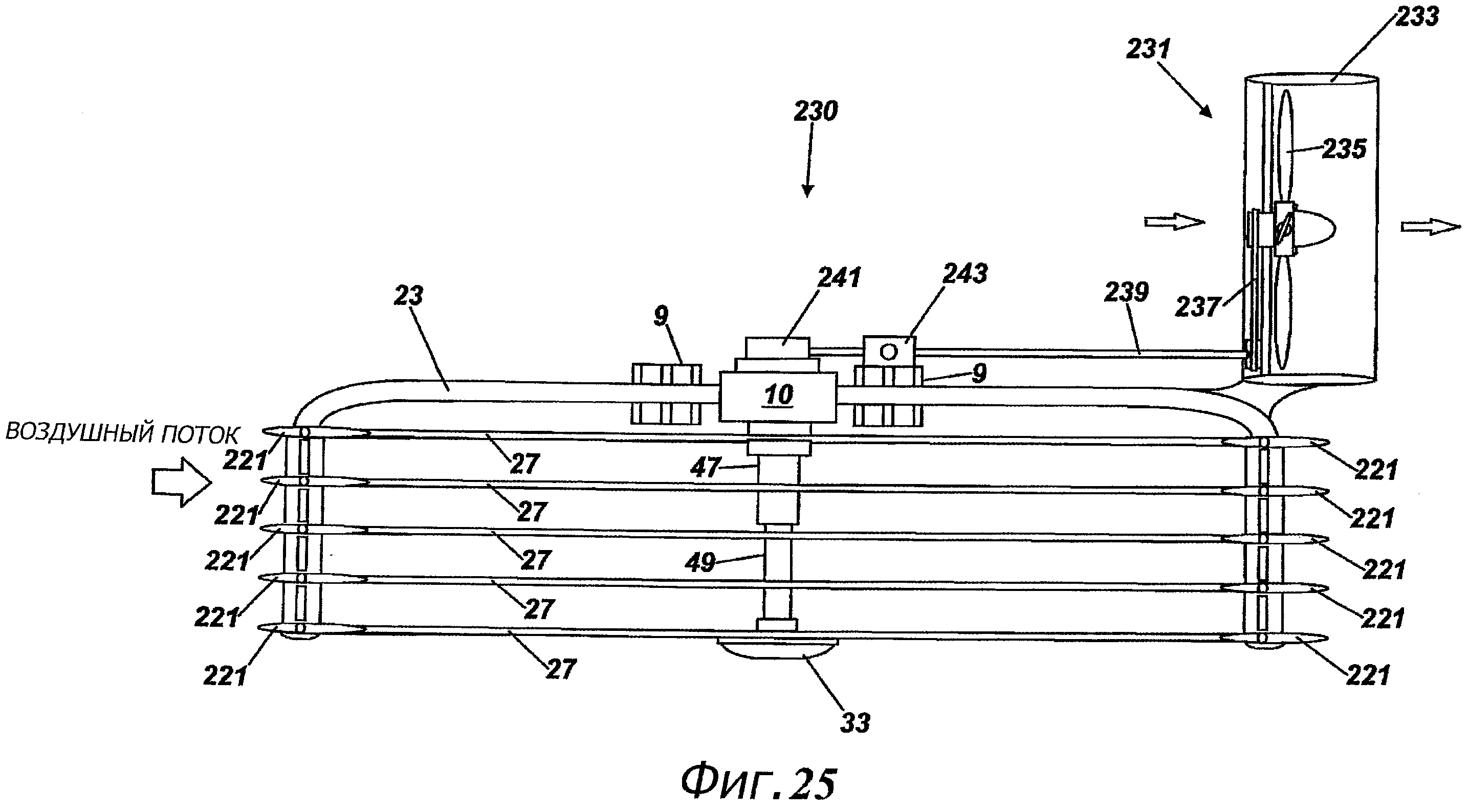
на фиг.25 представлен вид сбоку дополнительно модифицированного летательного аппарата по настоящему изобретению, для большей наглядности часть деталей аппарата не показана, а другие детали аппарата находятся в первом положении;
на фиг.26 представлен вид спереди дополнительно модифицированного летательного аппарата по фиг.25;
на фиг.27 представлен вид в плане дополнительно модифицированного летательного аппарата по фигурам 25 и 26; и
на фиг.28 представлен вид сбоку дополнительно модифицированного летательного аппарата по фигурам с 25 по 27, часть деталей аппарата находится во втором положении.
Осуществление изобретения
Летательный аппарат на фигурах с 1 по 6 содержит раму 3, снизу которой установлены два воздушных винта 5, 7 противоположного вращения на вертикальной оси, использующих общую ось 8 вращения. Воздушные винты 5, 7 приводятся в действие двумя двигателями 9 через общий приводной механизм 10, двигатели 9 установлены на раме 3, над воздушными винтами 5, 7 и продольно разнесены друг от друга вдоль рамы 3. Корпус установлен сверху рамы 3, над воздушными винтами 5, 7 и содержит аэродинамическую носовую часть 13, кресло 15, расположенное сзади носовой части 13, хвостовую часть 17, расположенную сзади кресла 15, которая в данном примере оснащена туннельным хвостовым винтом 19. Рукоятки 21 установлены подвижно, т.е. в данном случае вращаются, на раме 3, между креслом 15 и носовой частью 13. Пользователь аппарата 1, таким образом, сидит, по существу, в центре, над воздушными винтами 5, 7, его ноги широко расставлены над двигателями 9 и приводным механизмом 10, подобная поза напоминает позу мотоциклиста.
Рама 3 содержит две параллельные основные поперечины 23 рамы, проходящие продольно, от передней к задней части аппарата 1. Круговая юбка 25 расположена вокруг воздушных винтов 5, 7 и установлена с торцов поперечины 23 рамы. Юбка 25 содержит множество вертикально разнесенных колец 27, имеющих в перечном сечении форму аэродинамического профиля. Кольца 27 удерживаются в разнесенном друг от друга положении при помощи множества вертикальных разделительных стоек 29 таким образом, чтобы они определяли воздухозаборные отверстия между каждой парой колец 27.
В основании юбки 25 имеются три равноудаленных полоза 31, 32. Два боковых полоза 31 проходят вперед от оси 8 воздушного винта до юбки 25 под углом примерно в 45° к продольной оси аппарата 1. Задний полоз 32 проходит назад от оси 8 воздушного винта в направлении, соосном с продольной осью аппарата 1.
Крайняя нижняя поверхность каждого из полозов 31, 32 изогнута, центральная сферическая втулка или свободно вращающийся шар 33 расположены у места пересечения полозов 31, 32 у оси 8 воздушного винта. Поэтому, когда аппарат 1 стоит на земле, он наклонен назад и в одну сторону таким образом, чтобы он опирался на шар 33, задний полоз 32 и один из боковых полозов 31. Во время нахождения на земле аппарат 1 можно перемещать, приподняв его с полозов 31, 32 так, чтобы он опирался только на шар 33.
Корпус также имеет круглую форму в плане, окружность корпуса граничит с верхним краем 34 юбки 25. Носовая часть 13, кресло 15 и хвостовая часть 17 образуют отсек, проходящий продольно спереди назад аппарата 1, установленный сверху поперечин 23 рамы. Кресло и рукоятки 21 разнесены друг от друга вдоль продольной оси рамы 3 и расположены радиально внутри окружности воздушных винтов 5, 7. Изогнутые спицы 34 проходят радиально наружу от основного корпуса к верхнему краю 34 юбки 25. Рядом с креслом 15 расположены подножки 36.
В данном примере аппарат 1 содержит два двигателя 9, продольно разнесенных друг от друга вдоль поперечин 23 рамы, расположенных с каждой стороны от оси 8 вращения воздушных винтов 5, 7. В данном примере каждый двигатель 9 содержит четырехтактный бензиновый мотор, каждый мотор содержит соответствующее воздухозаборное отверстие 37 для подачи воздуха через впускное отверстие 38, образованное в носовой части 13 аппарата 1, каждый мотор также содержит соответствующую выхлопную трубу и глушитель 39, проходящий через хвостовую часть 17 аппарата 1. Скорость каждого двигателя 9 управляется соответствующим сектором газа (не показаны), два сектора газа расположены рядом друг с другом спереди кресла, под рукоятками 21. Количество оборотов в минуту каждого из них устанавливается в зависимости от веса пилота. После выбора подобного заданного количества оборотов в минуту во время обычного полета сектора газа больше не используются.
Каждый двигатель 9 содержит соответствующий выходной вал 41, соединенный с соответствующим эксцентриковым роликом или другим односторонним сцеплением 43. Выходной вал 44 каждой муфты 43 свободного хода вставлен в общий приводной механизм 10.
Приводной механизм 10 содержит картер 45 редуктора, в котором установлены два вертикальных соосных вала 47, 49 воздушных винтов, внешний вал 47 содержит верхнюю часть внутреннего вала 49. На верхнем торце каждого из валов 47, 49 воздушных винтов имеется спирально-зубчатая коническая передача 51, 53, скошенная под 45°. Нижние торцы валов 47, 49 соединены с верхним и нижним воздушными винтами 5, 7 соответственно.
Конические зубчатые передачи 51, 53 вертикально разнесены друг от друга и приводятся в действие от меньших по размеру конических зубчатых передач 55, установленных на торцах выходных валов 44 муфты свободного хода внутри картера 45 редуктора. Меньшие по размеру конические зубчатые передачи 55 расположены между двумя коническими зубчатыми передачами 51, 53 таким образом, что нижняя коническая зубчатая передача 51 приводится в действие за счет вращения выходных валов 44 муфты свободного хода для вращения выходного вала 47 воздушного винта, а также верхнего воздушного винта 5 в первом положении. Верхняя коническая зубчатая передача 53 приводится в действие за счет вращения выходных валов 44 муфты свободного хода для вращения внутреннего вала 49 воздушного винта, а также нижнего воздушного винта 7 в направлении, противоположном направлению вращения верхнего воздушного винта 5.
Соответственно двигатели 9 и приводной механизм 10 расположены таким образом, чтобы воздушные винты 5, 7 вращались в противоположном направлении, подобное вращение в противоположном направлении ликвидирует или сводит к минимуму любую реакцию от крутящего момента, которая в ином случае приводила бы к рысканию аппарата 1 относительно оси 8 воздушного винта.
Муфты 43 свободного хода позволяют одному из двигателей 9 приводить в действие воздушные винты 5, 7 без использования другого двигателя 9 или так, чтобы один из двигателей создавал меньший крутящий момент, чем другой двигатель, сцепление 43, сопряженное с неработающим или создающим меньший крутящий момент двигателем 9, позволяет вращаться выходному валу 44 муфты свободного хода относительно выходного вала 41 этого же двигателя 9.
Радиально крайние внутренние торцы каждой лопасти 5А верхнего воздушного винта 5 установлены в соответствующих парах разнесенных друг от друга монтажных плит 51. Каждая пара плит 51 установлена во втулке 53 у крайнего нижнего торца внешнего вала 47 воздушного винта при помощи двух радиально разнесенных шаровых соединений 55. Соединения 55 расположены таким образом, что лопасти 5А вращаются вместе с втулкой 53 вокруг оси 8 воздушного винта, а также таким образом, что каждая лопасть 5А может вращаться вокруг ее собственной продольной оси 57, т.е. вокруг оси, перпендикулярной оси 8 вращения воздушного винта, так, чтобы шаг лопастей 5А можно было менять.
Аналогичным образом, радиально внутренние торцы каждой лопасти 7А нижнего воздушного винта 7 установлены в соответствующих парах разнесенных друг от друга монтажных плит 71. Каждая пара плит 71 установлена во втулке 73 у крайнего нижнего торца внешнего вала 49 воздушного винта при помощи двух радиально разнесенных шаровых соединений 75, расположенных таким образом, что лопасти 7А вращаются вместе со втулкой 73 вокруг оси 8 воздушного винта, а также таким образом, что каждая лопасть 7А может вращаться вокруг ее собственной продольной оси 77, т.е. вокруг оси, перпендикулярной оси 8 вращения воздушного винта, так, чтобы шаг лопастей 7А также можно было менять.
На фигурах 7 и 8 изображены два примера механизма управления общим шагом, используемого для совместного управления шагом лопастей 5А, 7А каждого из воздушных винтов 5, 7.
На фиг.7 показан механизм 81 управления общим шагом, в котором шаг лопастей 5А, 7А верхнего и нижнего воздушных винтов 5, 7 одновременно управляется при помощи единого исполнительного устройства.
Механизм 81 управления общим шагом содержит невращающийся распределительный вал 83, проходящий соосно через центр внутреннего вала 49 воздушного винта, верхний торец распределительного вала 83 выступает из верхней части картера 45 редуктора, нижний торец распределительного вала 83 выступает снизу втулки 73 нижнего воздушного винта 7.
Верхний торец распределительного вала 83 соединен с исполнительным устройством 85, которое в данном примере содержит исполнительное устройство линейного сервопривода. Исполнительное устройство 85 управляется вращающейся ручкой 86, расположенной с одной стороны рукояток 21.
Нижняя тарелка 87 автомата перекоса свободно вращается на нижнем торце распределительного вала 83. Нижняя тарелка 87 автомата перекоса соединена с нижней монтажной плитой 71 каждой пары плит 71 через соответствующий рычажный механизм 89 на удалении от продольной оси соответствующей лопасти 7А. Рычажные механизмы 89 передают вращательное движение нижнего воздушного винта 7 нижней тарелке 87 автомата перекоса таким образом, чтобы нижняя тарелка 87 автомата перекоса приводилась во вращение нижним воздушным винтом 7 относительно распределительного вала 83.
Верхняя монтажная плита 71 каждой лопасти 7А соединена с передающей тарелкой 91 автомата перекоса через соответствующий передающий рычажный механизм 93. Передающая тарелка 91 автомата перекоса также приводится во вращение внутренним валом 49 воздушного винта и установлена в муфте 94, выполненной с возможностью скольжения аксиально вверх и вниз относительно вала 49 воздушного винта.
Муфта 94 соединяет передающую тарелку 91 автомата перекоса с верхней тарелкой 97 автомата перекоса, которая соединена посредством рычажных механизмов 99 с нижними монтажными плитами 51 каждой части плиты 51 верхнего воздушного винта 5. Верхняя тарелка 97 автомата перекоса свободно вращается в муфте 94 вместе с верхним воздушным винтом 5, т.е. в направлении, противоположном направлению вращения нижнего воздушного винта 7, а также нижней и передающей тарелок 87, 91 автомата перекоса.
Во время использования пользователь включает исполнительное устройство 85 поворотом вращающейся ручки 86 на рукоятках 21. Это приводит к перемещению распределительного вала 83 вверх относительно картера 45 редуктора и воздушных винтов 5, 7. Это также заставляет перемещаться вверх нижнюю тарелку 87 автомата перекоса, подобное линейное движение вверх преобразуется рычажными механизмами 89 во вращательное движение лопастей 7А против часовой стрелки относительно их продольных осей 77.
Движение вверх нижней тарелки 87 автомата перекоса передается на передающую тарелку автомата перекоса 91через рычажные механизмы 93 таким образом, что передающая тарелка автомата перекоса 91 и муфта 94 также выталкиваются вверх вдоль внутреннего вала 49 воздушного винта. Муфта 94 передает подобное вертикальное движение вверх верхней тарелке 97 автомата перекоса, которая вращается вместе с верхним воздушным винтом 5. Линейное движение вверх верхней тарелки 97 автомата перекоса относительно верхнего воздушного винта 5 преобразуется рычажными механизмами 99 во вращательное движение лопастей 5А против часовой стрелки относительно их продольных осей 57.
Таким образом, при повороте вращающейся ручки 86 рукоятки общий шаг лопастей 5А, 7А верхнего и нижнего воздушных винтов 5, 7 одновременно изменяется относительно продольных осей лопастей 5А, 7А в направлении, учитывающем противоположное вращение воздушных винтов 5, 7, т.е. нижние лопасти 7А вращаются по часовой стрелке, а верхние лопасти 5А вращаются против часовой стрелки. Вращающаяся ручка 86, таким образом, выступает в качестве устройства управления общим шагом, которое, во время работы, управляет подъемом или снижением аппарата 1.
В данном варианте осуществления шаг лопастей 5А, 7А воздушных винтов не используется для управления рысканием аппарата 1. Вместо этого для управления рысканием используется один из параметров хвостового винта 19, например шаг лопастей или скорость вращения. Управление осуществляется путем поворота рукояток 21 относительно рамы 3 в том направлении, в котором требуется рыскание аппарата. При повороте рукояток 21 включается исполнительное устройство, регулирующее соответственно шаг лопастей или скорость вращения хвостового винта 19.
На фиг.8 показан альтернативный механизм 101 управления общим шагом, позволяющий управлять шагом лопастей 5А, 7А верхнего и нижнего воздушных винтов 5, 7 раздельно. Альтернативный механизм 101 управления общим шагом функционирует как механизм управления рысканием.
Механизм 101 аналогичен механизму 91, с той лишь разницей, что в нем отсутствуют передающая и верхняя тарелки 91, 97 автомата перекоса. Нижняя тарелка 87 автомата перекоса осталась и используется для управления общим шагом лопастей 7А нижнего воздушного винта 7, как это описано выше.
Общий шаг лопастей 5А верхнего воздушного винта управляется в данном примере тарелкой 103 управления рысканием автомата перекоса, которая соединена с верхними монтажными плитами 51 лопастей 5А верхнего воздушного винта 5 через соответствующие рычажные механизмы 105. Тарелка 103 управления рысканием автомата перекоса свободно вращается в муфте 107, выполненной с возможностью аксиального скольжения вверх и вниз на внешнем валу 47 воздушного винта. Верх муфты 107 соединен с линейным сервоприводом 109, установленным в нижней части 111 картера 45 редуктора.
Исполнительное устройство 109 позволяет подвижно перемещать муфту 107 вверх или вниз по внешнему валу 47 воздушного винта, перемещая, таким образом, тарелку 103 управления рысканием автомата перекоса к верхнему воздушному винту 5 или от него. Линейное перемещение тарелки 103 управления рысканием автомата перекоса относительно верхнего воздушного винта 5 преобразуется рычажными механизмами 105 во вращение лопастей 5А верхнего воздушного винта против часовой стрелки вокруг их продольных осей 57.
Нижняя тарелка и тарелка 87, 103 управления рысканием автомата перекоса и их соответствующие исполнительные устройства 85, 109 позволяют регулировать общий шаг лопастей 5А, 7А верхнего и нижнего воздушных винтов 5, 7 раздельно.
Регулирование общего шага лопастей 7А верхнего воздушного винта одновременно с общим шагом лопастей 5А нижнего воздушного винта позволяет управлять набором высоты и снижением аппарата 1, как это описано выше.
Однако при регулировании общего шага лопастей 5А верхнего воздушного винта отдельно от общего шага лопастей 7А нижнего воздушного винта реакцию от крутящего момента, создаваемого воздушными винтами 5, 7 противоположного вращения, можно менять, управляя, таким образом, рысканием аппарата 1.
В данном варианте осуществления, при управлении рысканием аппарата, шаг лопастей 7А нижнего воздушного винта поддерживается постоянным, а управление углом рыскания осуществляется лишь за счет изменения общего шага лопастей 5А верхнего воздушного винта.
Исполнительное устройство 109, управляющее шагом лопастей 5А верхнего воздушного винта, приводится в действие вращающейся ручкой 86 на рукоятках 21, а также вращением непосредственно самих рукояток 21. Исполнительное устройство 85, управляющее шагом лопастей 5А нижнего воздушного винта, приводится в действие только вращающейся ручкой 86 на рукоятках 21.
Таким образом, если пользователю нужно набрать высоту, то он поворачивает вращающуюся ручку 86, которая приводит в действие оба исполнительных устройства 85, 109 для одновременного изменения общего шага лопастей верхнего и нижнего воздушных винтов 5А, 7А.
Если пользователю нужно, чтобы аппарат 1 начал рыскать в одну сторону, то он удерживает вращающуюся ручку 86 в постоянном положении, поворачивая рукоятки 21 в соответствующем направлении. При этом верхнее исполнительное устройство 109 лишь увеличивает шаг лопастей 5А верхнего воздушного винта, увеличивая, таким образом, реакцию от крутящего момента в соответствующем направлении так, чтобы аппарат 1 начинал рыскать по часовой стрелке. Если рукоятки 21 поворачиваются в противоположном направлении, то верхнее исполнительное устройство 109 уменьшает шаг лопастей 5А верхнего воздушного винта, уменьшая, таким образом, реакцию от крутящего момента так, что аппарат 1 начинает рыскать против часовой стрелки. Если рукоятки 21 удерживаются в прямом положении, то исполнительные устройства 85, 109 функционируют таким образом, что общий шаг лопастей 5А, 7А верхнего и нижнего воздушных винтов становится одинаковым, реакции по крутящему моменту не возникает, и, соответственно, рыскания аппарата 1 не происходит.
В данном варианте осуществления хвостовой винт 19 не нужен и может не использоваться.
В каждом из приведенных выше вариантов осуществления дополнительное управление при наборе высоты или снижении обеспечивается за счет увеличения или уменьшения скорости двигателей 9 с помощью секторов газа.
Управление направлением движения аппарата 1 осуществляется при помощи кинестетики, т.е. регулировки распределения веса пользователя относительно аппарата 1. Для движения аппарата 1 вперед пользователь наклоняется вперед, для движения аппарата 1 назад - пользователь отклоняется назад. Пользователь также может управлять аппаратом 1 в полете, наклоняясь то в одну сторону, то в другую, подобное управление обычно осуществляется совместно с управлением рыскания аппарата 1 при помощи рукояток 21.
Во время полета в определенном направлении воздух проходит через воздухозаборники в юбке 25, расположенные над кольцами 27, имеющими форму аэродинамического профиля. За счет этого поток воздуха направляется на воздушные винты 5, 7 и создает подъемную силу, которая увеличивает скорость и эффективность аппарата 1.
Шаг лопастей 5А, 7А верхнего и нижнего воздушных винтов незначительно отличается с учетом того, что во время использования воздух на нижний воздушный винт 7 поступает с большей скоростью.
Во время нахождения на земле аппарат 1 можно перекатывать с помощью центрального шара 33. Шар 33 может быть изготовлен из материала с низким коэффициентом трения, таким образом, чтобы он скользил по земле или свободно вращался в гнезде в основании аппарата 1, позволяя перемещать аппарат 1 в разных направлениях.
Втулка в форме шара 33 и задний полоз 32 расположены таким образом, чтобы, когда аппарат 1 не используется, он находился в наклонном положении и был наклонен назад, облегчая взлет и позволяя пользователю переносить центр тяжести таким образом, чтобы задний полоз 32 отрывался от земли раньше, чем остальная часть аппарата 1. Это позволяет пользователю корректировать распределение веса перед взлетом аппарата 1. Центральный шар 33 устанавливается ниже проходящей по окружности юбки 25 или выступает из-под нее. Во время предвзлетной подготовки, используя, например, 60% тяги воздушных винтов 5, 7, пилот научится балансировать на подобном центральном шаре 33 так, чтобы ни одна из частей проходящей по окружности юбки 25 не касалась земли. После установления баланса, т.е. после того как аппарат 1 будет находиться в ненаклонном положении, удерживаясь центральным шаром 33 и подъемной силой, создаваемой воздушными винтами 5, 7, общий шаг можно будет увеличить для начала взлета.
Предполагается, что корпус 11 может быть изготовлен из углепластика, а юбка 25, кольца 27 и рама 3 - из алюминиевого материала. Глубина юбки 25 может быть 0.25 м, а диаметр 2 м. Как вариант, могут использоваться другие подходящие материалы и размеры.
Могут использоваться привязные ремни безопасности для пристегивания пользователя к аппарату 1. В носовой части 13 аппарата также может быть предусмотрен парашютный механизм, таким образом, чтобы он находился непосредственно перед рукоятками 21.
Управление исполнительными устройствами 85, 109 и собственно скоростью двигателя и скоростью/шагом хвостового винта 19 может осуществляться электродистанционно, таким образом, чтобы не использовалось никаких непосредственных механических соединений между рукоятками 21, вращающимися ручками 86, секторами управления газом и подвижными частями аппарата 1.
Двигатели 9 в описанных примерах являются двигателями внутреннего сгорания (ДВС), однако могут также использоваться и другие соответствующие источники энергии, например электрические или водородные двигатели. В случае использования ДВС, это может быть двух или четырехтактный двигатель, в зависимости от ситуации, с системой наддува, например с насосом наддува или турбокомпрессором, который может работать на бензине, дизельном топливе или биотопливе.
Предполагается, что, как вариант или как дополнение, могут использоваться и другие средства для управления рысканием аппарата 1 за счет регулирования относительно угловой скорости вращения одного или другого воздушных винтов 5, 7. Это может достигаться, например, за счет установки дискового тормоза на верхнем воздушном винте 7.
На фигурах с 9 по 13 показан другой вариант осуществления летательного аппарата 121, который также содержит раму, снизу которой на вертикальной оси установлены два воздушных винта 5, 7 противоположного вращения, которые используют общую ось вращения и которые приводятся в действие двумя двигателями через общий приводной механизм, двигатели установлены на раме сверху воздушных винтов 5, 7 и продольно разнесены между собой вдоль рамы.
Однако в данном варианте осуществления корпус, установленный на раму сверху воздушных винтов 5, 7, содержит несущий контейнер 123, который может закрываться съемной или закрепленной на петлях крышкой 125.
Несущий контейнер имеет продолговатую форму, а его продольная ось выровнена с продольной осью аппарата, в длину контейнер 123 занимает большую часть длины аппарата, однако по ширине он относительно узкий, таким образом, чтобы стороны контейнера 123 были удалены от краев аппарата.
На фигурах с 14 по 17 представлен дополнительный вариант осуществления летательного аппарата 131, аналогичного аппарату 121, описанному выше со ссылкой на фигуры с 9 по 12. Однако в конструкцию несущего контейнера 123 внесены изменения, позволяющие человеку находиться внутри него. В крышке 125 контейнера соответственно с одной стороны сделан вырез 133, так, чтобы, через него проходила, по меньшей мере, голова человека. Вырез может быть закрыт вентилируемой прозрачной крышкой (не показана).
В вариантах осуществления 121, 131 хвостовой винт отсутствует, а рыскание летательных аппаратов 121, 131 управляется за счет изменения разворотного эффекта, создаваемого каждым из воздушных винтов 5, 7.
Кроме этого предусматривается, что полетом летательных аппаратов 121, 131 можно управлять дистанционно, с использованием соответствующего радио или GPS контроллера.
На фиг.18 показан модифицированный механизм 140 управления шагом лопастей, позволяющий управлять отдельно общим и циклическим шагом каждого комплекта лопастей 5А, 7А воздушных винтов через отдельные сервоприводы.
Также как и в примерах, описанных на фигурах 7 и 8 выше, каждый двигатель 9 содержит соответствующий выходной вал 41 (который может быть выходным валом промежуточного редуктора (не показан)), соединенный с соответствующим эксцентричным роликом или другим односторонним сцеплением 43. Выходной вал 44 каждой муфты 43 свободного хода вставлен в общий модифицированный приводной механизм.
Приводной механизм содержит верхний картер 145 редуктора, в котором установлены два вертикальных соосных воздушных винта 147, 149, внешний вал 147 содержит большую часть внутреннего вала 149. На верхних торцах каждого из валов 147, 149 воздушных винтов имеются соответствующие спирально-зубчатые конические передачи 151, 153, скошенные под 45°. Нижние торцы валов 147, 149 воздушных винтов соединены с верхним и нижним воздушными винтами 5, 7 соответственно.
Конические зубчатые передачи 151, 153 вертикально разнесены друг от друга и приводятся в действие от меньших по размеру конических зубчатых передач 155, установленных на торцах выходных валов 44 муфты свободного хода внутри картера 145 редуктора. Меньшие по размеру конические зубчатые передачи 155 расположены между двумя коническими зубчатыми передачами 151, 153 таким образом, что нижняя коническая зубчатая передача 151 приводится в действие за счет вращения выходных валов 44 муфты свободного хода для вращения выходного вала 147 воздушного винта, а также верхнего воздушного винта 5 в первом направлении. Верхняя коническая зубчатая передача 153 приводится в действие за счет вращения выходных валов 44 муфты свободного хода для вращения внутреннего вала 149 воздушного винта, а также нижнего воздушного винта 7 в направлении, противоположном направлению вращения верхнего воздушного винта 5.
Радиально крайние внутренние торцы каждой лопасти 5А верхнего воздушного винта 5 установлены в соответствующие гнезда 151. Каждое гнездо 151 установлено во втулке 153 у нижнего торца внешнего вала 147 воздушного винта при помощи двух, радиально разнесенных друг от друга, шаровых соединений 155.
Аналогичным образом радиально внутренние торцы каждой лопасти 7А нижнего воздушного винта 7 установлены в соответствующие гнезда 171. Каждое гнездо 171 установлено во втулке 173 у нижнего торца внутреннего вала 149 воздушного винта при помощи двух, радиально разнесенных друг от друга, шаровых соединений 175.
Внешний вал 147 имеет относительно больший диаметр и полый внутри, таким образом, чтобы в нем помещался внутренний вал 149, а также автомат перекоса и рычажный механизм управления для управления общим и циклическим шагом лопастей 7А нижнего воздушного винта.
Внешний вал 147 установлен с возможностью вращения внутри картера 145 редуктора при помощи соответствующих подшипников. Нижний торец внешнего вала 147 выступает из нижней части картера 145 редуктора, а гнезда 151 установлены на открытой части внешнего вала 147.
Механизм 181 автомата перекоса верхнего воздушного винта установлен снаружи нижней части картера 145 редуктора и содержит нижнюю тарелку 183 автомата перекоса, которая вращается вместе с верхним воздушным винтом 5 и соединена с гнездом 151 каждой верхней лопасти 5А при помощи рычажного механизма 185. Нижняя тарелка 183 автомата перекоса входит в зацепление с и перемещается вверх и вниз верхней тарелкой 187 автомата перекоса, которой не позволяет вращаться манипулятор 189.
Верхняя тарелка 187 автомата перекоса соединена через верхние раскосы 191 тяг с парой возвратно-поступательных сервомеханизмов 193 системы управления, установленных внутри картера 145 редуктора.
Сервоприводы 193 могут управлять перемещением верхней тарелки 187 автомата перекоса вверх и вниз, подобное перемещение передается вращающейся нижней тарелке 183 автомата перекоса, регулирующей общий или циклический шаг лопастей 7А нижнего воздушного винта 7.
Внутренний вал 149 установлен с возможностью вращения внутри внешнего вала 147 при помощи соответствующих подшипников/сальников. Внутренний вал 149 - также полый. Нижний торец внутреннего вала 149 выступает за нижний торец внешнего вала 147, а на выступающем торце внутреннего вала 149 установлена втулка 173 нижнего воздушного винта. Каждое гнездо 171 соединено с соответствующим рычагом 195 управления шагом, проходящим через стенку нижней части внутреннего вала 149.
Каждый рычаг 195 управления шагом соединен с соответствующей нижней тягой 197 механизма управления, идущей вверх внутри внутреннего вала 149 через два аксиально разнесенных суппорта 199, 201 тяги механизма управления к нижней тарелке 203 автомата перекоса механизма 202 автомата перекоса нижнего воздушного винта. Нижняя тарелка 203 автомата перекоса установлена с возможностью вращения на сферическом суппорте 205, который скользит по неподвижному опорному стержню 207 автомата перекоса, верх которого неподвижно закреплен в торцовой крышке 209 картера редуктора.
Нижняя тарелка 203 автомата перекоса входит в зацепление с верхней тарелкой 211 автомата перекоса, установленной без возможности вращения на опорном стержне 207.
Верхняя тарелка 211 автомата перекоса соединена через суппорт 215 тяги механизма управления с верхними тягами 213 механизма управления, которые проходят вверх внутри внутреннего вала 149 к соответствующим линейным возвратно-поступательным сервоприводам 219, установленным в торцевой крышке 209.
Поэтому при включении сервоприводов 219 происходит перемещение верхних тяг 213 механизма управления, которые заставляют верхнюю тарелку 211 автомата перекоса скользить вверх и вниз по опорному стержню 207. Перемещение верхней тарелки 211 автомата перекоса передается нижней тарелке 203 автомата перекоса. От нижней тарелки 203 автомата перекоса, через нижние тяги 197 механизма управления, перемещение передается на рычаги 195 управления шагом для корректирования угла каждой лопасти 7А нижнего воздушного винта 7.
Таким образом, общим и циклическим шагом лопастей 5А верхнего воздушного винта 5 можно управлять отдельно от общего и циклического шага лопастей 7А нижнего воздушного винта 7. Использование сервоприводов для осуществления подобного управления позволяет использовать электронный контроллер, проводной или беспроводной, для управления сервоприводами и, таким образом, управления шагом лопастей верхнего и нижнего воздушных винтов 5, 7 без непосредственной механической связи с оператором аппарата.
Два комплекта из трех (один комплект для нижнего воздушного винта 5 и один комплект для верхнего воздушного винта 7) независимых сервоприводов 193, 219 и два механизма 181, 202 автоматов перекоса позволяют осуществлять независимое дифференцированное управление общим и циклическим шагом воздушных винтов 5, 7.
Дифференцированное управление общим шагом необходимо для того, чтобы в аппарате имелись средства для точного управления рысканием/курсом. За счет управления шагом лопастей нижнего воздушного винта 7 отдельно от управления шагом лопастей верхнего винта 5 крутящий момент создается в одном направлении, заставляя аппарат вращаться, т.е. рыскать. Это также достигается за счет управления сервоприводами 193 верхнего воздушного винта таким образом, чтобы угол тарелок 183, 187 автомата перекоса оставался одинаковым, но они перемещались бы вверх или вниз вдоль приводных валов 147, 149, При этом каждая верхняя лопасть 5А поворачивается внутри гнезд 151 на заданный угол, а затем осуществляется управление сервоприводами 219 нижнего воздушного винта для поворота каждой нижней лопасти 7А внутри их гнезд 171 на другой угол.
Дифференцированное управление циклическим шагом осуществляется за счет управления сервоприводами 193 верхнего воздушного винта таким образом, чтобы они перемещались неодинаково так, чтобы тарелки 183, 187 автомата перекоса были наклонены относительно приводных валов 147, 149 таким образом, чтобы угол вращения каждой лопасти 5А, 7А внутри их соответствующих гнезд 151, 171 был разным, в зависимости от положения этих лопастей 5А, 7А.
Несмотря на то что возможно раздельное управление лопастями 5А, 7А, предполагается, что при обычном управлении тарелки 183, 187, 203, 211 автоматов перекоса управляются таким образом, чтобы верхние и нижние лопасти 5А, 7А двигались одинаково, кроме случаев, когда требуется изменить курс аппарата.
В данном варианте осуществления центральная втулка 33 установлена с возможностью вращения на основании внутреннего вала 149, а в качестве соответствующих подшипников используется заполненный воздухом амортизирующий полусферический шар.
На фигурах с 19 по 24 показана передняя и задняя части модифицированного летательного аппарата 200 с продолговатыми регулируемыми аэродинамическими профилями 221, используемыми вместо передних и задних секций из неподвижных аэродинамических колец 27 аппарата 1, описанного выше. Каждый регулируемый аэродинамический профиль 221 содержит продолговатые крылья, установленные на неподвижных аэродинамических кольцах 27, вращающиеся вокруг соответствующих горизонтальных осей, расположенных в центре давления 223 каждого аэродинамического профиля 221.
Каждый комплект передних и задних аэродинамических профилей 221 управляется соответствующим механическим или электромеханическим регулирующим механизмом. Предполагается, например, что каждый комплект аэродинамических профилей соединен с соответствующим рычагом управления, который может перемещаться при включении линейного возвратно-поступательного сервопривода.
Каждый комплект аэродинамических профилей 221 может перемещаться между нейтральным положением, показанным со ссылкой на фигуры 19 и 23, и наклонным положением, показанным со ссылкой на фигуры 22 и 24.
В нейтральном положении аэродинамические профили 221 переднего и заднего комплектов пропускают воздух в направлении, в целом, обозначенном стрелками 223, т.е. в направлении параллельном продольной оси аппарата. Нейтральное положение используется для зависания и полета с малой скоростью.
Однако, если требуется дополнительная подъемная сила, например во время полета вперед, аэродинамические профили 221 переднего и заднего комплектов переводятся в наклонное положение для пропускания воздуха в направлении, в целом, обозначенном стрелками 225, т.е. в направлении под наклоном к продольной оси аппарата.
Подвижные аэродинамические профили 221, таким образом, по мере необходимости обеспечивают создание дополнительной подъемной силы.
Разумеется, комплекты передних и задних аэродинамических профилей 221 могут управляться независимо, таким образом, чтобы передвигался лишь комплект передних или задних аэродинамических профилей 221. Таким образом, обеспечивается достаточная возможность точной регулировки создаваемой подъемной силы. Предполагается, что угол аэродинамических профилей 221 управляется автоматически по команде оператора, отдаваемой аппарату, об увеличении или уменьшении подъемной силы.
На фигурах с 25 по 28 показана задняя часть дополнительно модифицированного летательного аппарата 230 с узлом 231 заднего нагнетающего вентилятора, содержащего воздухозаборник 233 крыльчатки, в котором свободно вращается толкающая крыльчатка 235, ось вращения которой проходит параллельно продольной оси аппарата, т.е. перпендикулярно оси вращения воздушных винтов 5, 7.
Толкающая крыльчатка 235 приводится в действие через трансмиссию 237 крыльчатки приводным валом 239 крыльчатки, который проходит назад от вспомогательного редуктора 241, расположенного в центре аппарата 230. Трансмиссия 237 крыльчатки может содержать, например, зубчатую или ременную передачу между воздушным винтом 235 и приводным валом 237. Между вспомогательным редуктором 241 и приводным валом 239 находится сцепление 243. Вспомогательный редуктор 241 приводится в действие от основного редуктора 10 аппарата 230.
При необходимости узел 231 нагнетающего вентилятора используется для создания дополнительной прямой тяги. Подобная необходимость может возникать, когда требуется увеличить лишь скорость переднего хода или при выполнении других маневров, таких как быстрый набор высоты или изменение направления движения.
Узел 231 нагнетающего вентилятора может управляться совместно с подвижными аэродинамическими профилями 221 и может управляться автоматически таким образом, чтобы воздушные винты 5, 7, аэродинамические профили 221 и узел 231 нагнетающего вентилятора совместно обеспечивали прямую тягу, подъемную силу и направление движения.
Предполагается, что описанные выше признаки могут использоваться в любой соответствующей комбинации и, следовательно, не ограничены лишь конкретными описанными вариантами осуществления. Например, узел нагнетающего вентилятора может использоваться в аппарате без подвижных аэродинамических профилей.
Предполагается, что описанный выше аппарат может быть оборудован несколькими креслами, разнесенными друг от друга поперечно в ширину или продольно вдоль аппарата.
Скорость вращения и шаг воздушных винтов 5, 7, сервоприводы 193, 219, подвижные аэродинамические профили 221, а также нагнетающий вентилятор 231, если используется, могут управляться механически или электронно соответствующим проводным или беспроводным контроллером.
Летательный аппарат, описанный выше, может управляться автономно, т.е. без присутствия пилота непосредственно в самом аппарате. Автономное управление может обеспечиваться за счет использования гироскопов, установленных в аппарате, определяющих перемещение аппарата в определенном направлении и передающих сигнал на контроллер для изменения, по меньшей мере, одного из следующих параметров: скорости вращения и шага лопастей одного из воздушных винтов 5, 7, положения сервоприводов 193, 219, подвижных аэродинамических профилей 221, а также работы узла 231 нагнетающего вентилятора для создания усилия, противодействующего обнаруженному движению.
В контроллер встроено множество пьезоэлектронных гироскопов, управляющих авиационными сервоприводами управления полетом. Каждый гироскоп, а соответственно, каждый сервопривод, удерживает воздушное судно в заданном пространственном положении с определенными параметрами рыскания, тангажа и крена до получения дополнительных указаний от пилота или контроллера. Гироскопная система стабилизации предотвращает воздействие воздушной турбулентности или распределения веса воздушного судна на пространственное положение воздушного судна во время полета. Она также позволяет управлять воздушным судном пилотам с минимальными навыками, поскольку воздушное судно в определенной степени самостоятельно управляет своим пространственным положением, т.е. без получения команд от пилота. Поэтому контроллер может быть настроен таким образом, что в случае если пилот захочет полностью передать управление аппаратом, будет выбрано нейтральное положение, например статичное зависание на одном месте.
В контроллер также может быть встроено множество акселерометров, управляющих авиационными сервоприводами. Каждый акселерометр измеряет перемещение по высоте, скольжение на крыло, а также продольное движение. Опять же это позволяет управлять воздушным судном при помощи контроллера, поддерживая статичное положение зависания даже при сильном ветре и не позволяя воздушному судну опускаться на землю слишком быстро.
Все параметры гироскопов и акселерометров запрограммированы в контроллер с учетом квалификации пилота или требований по автономному управлению полетом. Для разных пилотов и режимов эксплуатации могут использоваться разные программы.
Гироскопная система управления, таким образом, может обеспечивать устойчивое положение по трем координатам.
Контроллер эффективно управляет, по меньшей мере, одним из следующих параметров: скоростью и шагом лопастей воздушных винтов 5, 7, положением сервоприводов 193, 219, подвижных аэродинамических профилей 221, а также работой узла нагнетающего вентилятора 231 для выравнивания направления, по которому по информации гироскопов происходит отклонение аппарата, смещая центр тяжести обратно под аппарат.
Предполагается, что при необходимости циклический шаг верхнего и нижнего воздушных винтов 5, 7 изменяется в интервале, например, 0.06 секунды. Например, если порыв ветра смещает воздушное судно немного вправо, гироскоп заметит это и отправит сигнал на контроллер для управления циклическим шагом и увеличения шага лопастей при их приближении к правой стороне воздушного судна, тем самым увеличивая подъемную силу только с этой стороны воздушного судна и выравнивая его. Предполагается, что каждую минуту с контроллера на сервоприводы отправляются тысячи сигналов для корректирования шага лопастей и, соответственно, постоянного поддержания воздушного судна в правильном положении. Акселерометры работают аналогичным образом, с той лишь разницей, что они используются контроллером для управления воздушным судном так, чтобы оно поддерживалось в том положении, которое было определено в последний раз, а не в каком-то конкретном пространственном положении.
По другому альтернативному варианту осуществления летательного аппарата циклический и общий шаг лопастей 5А верхнего воздушного винта 5 может управляться вместе с циклическим и общим шагом лопастей 7А нижнего воздушного винта 7 при помощи только трех сервоприводов. Шаг верхнего комплекта лопастей 5А, таким образом, управляется совместно с шагом лопастей 7А нижнего комплекта. В этом случае рыскание аппарата может управляться механизмом корректирования воздушного потока, содержащего средства корректирования воздушного потока, входящего и/или выходящего из воздушных винтов 5, 7.
Подобный механизм может содержать два комплекта из двух регулируемых направляющих лопаток, оба комплекта устанавливаются над воздушными винтами 5, 7, один комплект в направлении передней части аппарата, а другой - в направлении задней части аппарата. Оба комплекта устанавливаются таким образом, чтобы направляющая лопатка каждого из комплектов находилась с каждой стороны от продольной оси аппарата. Каждая направляющая лопатка устанавливается таким образом, чтобы она могла перемещаться вокруг, в целом, горизонтальной оси для регулирования направления части воздушного потока, проходящего через воздушные винты 5, 7. Воздушный поток, таким образом, может регулироваться направляющими лопатками с любой стороны продольной оси аппарата, заставляя аппарат поворачиваться направо или налево.
Средства корректирования воздушного потока могут содержать любые средства для изменения направления воздушного потока, в том числе направляющие лопатки в форме аэродинамических профилей, закрылок или воздухозаборники с регулируемыми отверстиями.
Средства корректирования воздушного потока могут быть расположены в любом соответствующем положении относительно воздушных винтов 5, 7. Подобным положением, например, может быть положение над верхним воздушным винтом 5, под нижним воздушным винтом 7 или между воздушными винтами 5, 7.
Реферат
Изобретение относится к области авиации, в частности к конструкциям индивидуальных летательных аппаратов. Летательный аппарат (1) содержит раму (3), снизу которой установлены два воздушных винта (5), (7) противоположного вращения на вертикальной оси, использующих общую ось (8) вращения. Воздушные винты (5), (7) приводятся в действие двумя двигателями (9) через общий приводной механизм (10). Двигатели (9) установлены на раме (3) над воздушными винтами (5), (7) и продольно разнесены друг от друга вдоль рамы (3). Рукоятки (21) подвижно установлены на раме (3) между креслом (15) и носовой частью (13). Пользователь аппарата (1), таким образом, сидит в центре, над воздушными винтами (5), (7), его ноги широко расставлены над двигателями (9) и приводным механизмом (10), как на мотоцикле. Каждый воздушный винт оснащен механизмом управления шагом лопастей, при этом лопасти каждого винта управляются отдельно от другого. Вокруг воздушных винтов расположена круговая юбка, содержащая множество вертикально разнесенных колец, соединенных множеством вертикальных стоек. Достигается повышение надежности управления летательным аппаратом. 3 н. и 13 з.п. ф-лы, 28 ил.
Формула
Документы, цитированные в отчёте о поиске
Беспилотный летательный аппарат
Комментарии