Беспилотный аэромагнитный комплекс коптерного типа - RU173640U1
Код документа: RU173640U1
Чертежи

Описание
Предлагаемая полезная модель предназначена для измерения модуля полного вектора магнитной индукции с беспилотного автопилотируемого летательного аппарата коптерного типа и относится к области аэромагнитных исследований.
Из существующего уровня техники известен способ определения точек геодезических координат с помощью лазерного устройства, установленного на роботизированном коптере с DGPS приемником [1]. Изобретение относится к области геодезии для межевания и определения границ земельных участков, в частности для создания геодезических сетей различного назначения на основе использования системы спутниковой навигации. Техническим результатом является автоматизация создания геодезических сетей. Для этого дополнительно устанавливают лазерное устройство в блок подвески с позиционными стабилизаторами в нижней части роботизированного коптера точно под геометрической осью антенны, например с DGPS (Глонасс, Галилео) приемником, рядом располагают видеокамеру, позволяющую оператору визуально наводить с помощью горизонтального перемещения роботизированного коптера проектируемый лазерный луч на середину геодезической марки и удерживать роботизированный коптер в течение короткого промежутка времени в этом положении до установки DGPS приемником точности своего пространственного положения, затем запоминают координаты данной точки центрирования и последовательно роботизированный коптер по обследуемому участку (точкам), снимая координаты, перемещает всех необходимых пунктов. В случае применения дистанционно управляемого беспилотного летательного аппарата существует необходимость наличия хорошего специалиста оператора для координации и привязки пролета летательного аппарата по обследуемому участку. Также недостатком является невозможность установки датчиков для измерения магнитного поля земли на беспилотный летательный аппарата ввиду ограниченности коптера по полезной нагрузке.
Также известен аэрогеофизический комплекс [2], содержащий размещенные на летательном аппарате блок измерителей параметров геофизических полей и модуль спутниковой навигации, входы-выходы которых подключены к блоку сбора и обработки информации, при этом блок измерителей параметров геофизических полей включает магнитометрический модуль, включающий датчики магнитометрической информации. В качестве летательного аппарата используется двухместный сверхлегкий самолет серии СП-34 массой 495 кг с крейсерской скоростью 100 км/ч с возможностью обеспечения альтитуды полета h=5-15 м над поверхностью земли. Блок измерителей параметров геофизических полей включает, по меньшей мере, три датчика магнитометрической информации, два из которых размещены на крыльях, а третий - на киле хвостового оперения летательного аппарата. Данный комплекс предусматривает использование беспилотного дистанционно управляемого летательного аппарата. Чувствительность датчиков составляет 0,5-1,0 нТл. Корпусы измерителей, размещенных на крыльях, хвостовом оперении и на нижней части фюзеляжа, выполнены обтекаемой формы. Модуль спутниковой навигации выполнен в виде аппаратуры дифференциальных спутниковых систем «Навстар» и/или «Глонасс», которая размещена в фюзеляже летательного аппарата. Блок сбора и обработки информации, выполненный в виде портативного персонального компьютера-ноутбук, размещен в фюзеляже и снабжен накопителем информации. Недостатками данного технического решения являются: необходимость наличия или обустройства взлетно-посадочной площадки, вследствие этого область применения данного комплекса ограничена; риски, связанные с присутствием людей на борту аэрогеофизического комплекса, и необходимость привлечения высококвалифицированного летного персонала для проведения полетов на сверхмалых высотах.
Наиболее близким к заявленному техническому решению в случае применения беспилотного летательного аппарата известен беспилотный аэромагнитный комплекс (БАМК) [3], включающий для измерения модуля полного вектора магнитной индукции магниточувствительный датчик на конце крыла беспилотного летательного аппарата (БПЛА). Сервоприводы и электроника расположены в центральной части; двигатель внутреннего сгорания (ЛВС) компрессионного типа расположен в задней части БПЛА. Магниточувствительным датчиком для установки на БАМК является квантовый рубидиевый датчик с оптической накачкой. Использован ЛВС без генератора и стартера, а в качестве БПЛА использован аппарат самолетного типа конструкции «крыло» легкого типа среднего радиуса действия со взлетной массой - от 5 до 7 кг, размахом крыльев 220 см, радиусом действия 75-100 км, рабочей высотой 50-300 м. Недостатками данного решения являются необходимость площадки для влета и посадки, большая скорость полета при детальных съемках, невозможность полета над горным рельефом.
Анализ результатов предварительно проведенного патентного поиска позволяет сделать следующие выводы:
а) основное количество патентов посвящено установке магниточувствительных датчиков на различные типы самолетной и вертолетной техники;
б) существуют единичные патенты посвященные установке магнитных датчиков на дистанционно-управляемые беспилотные летательные аппараты, что ограничивает радиус применения.
Задача, на решение которой направлено заявленное техническое решение, заключается в расширении арсенала технических средств в области аэромагнитных исследований, а также появляется возможность осуществлять поиски, оценку и мониторинг состояния месторождений полезных ископаемых и техногенно-минеральных образований.
Беспилотный аэромагнитный комплекс коптерного типа (АЭРО-МК) состоит из: беспилотного летательного аппарата (БПЛА) коптерного типа; измерительного блока, квантового магниточувствительного датчика с оптической накачкой, световода, стабилизатора, антенны и датчика GPS, расположенных на выпускном диске, подвешенном к тросу.
АЭРО-МК предназначен для измерения модуля полного вектора магнитной индукции и относится к области аэромагнитных исследований.
Взлетная масса которого - от 7 до 10 кг. Радиус действия 10 - 15 км. Рабочая высота 10-200 м. Выпускной диск и подвешенный трос выполнены из немагнитных материалов.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является возможность проведения высокоточной магнитометрической съемки и топогеодезической съемки с использованием АЭРО-МК для построения карт масштабом 1:2000 с погрешностью измерения модуля полного вектора магнитной индукции до ±0,5 нТл с последующей привязкой карт по данным GPS.
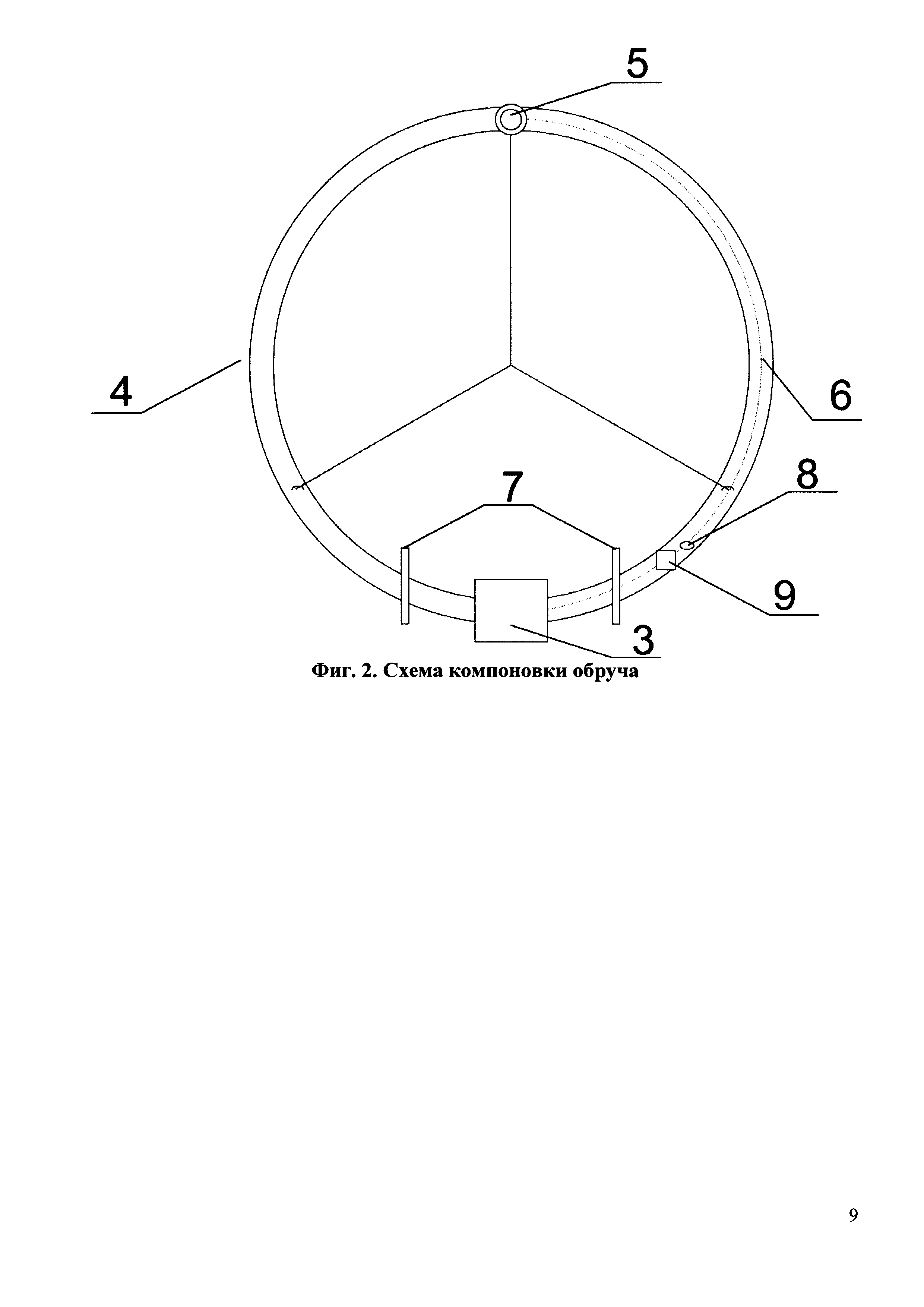
Сущность технического решения поясняется чертежами, на которых представлена схема компоновки АЭРО-МК и диска (фиг. 1, 2).
АЭРО-МК также включает в себя:
1 - БПЛА коптерного типа,
2 - трос,
3 - измерительный блок,
4 - диск,
5 - датчик магниточувствительный с оптической накачкой,
6 - световод,
7 - стабилизатор,
8 - антенну GPS,
9 - датчик GPS.
Данные составные элементы смонтированы на диск, подвешенный на БЛА коптерного типа.
Работает устройство следующим образом. Полетное задание автопилота АЭРО-МК формируется в ПК. Во время пролета над территорией исследования осуществляется комплекс измерений модуля полного вектора магнитной индукции, а также синхронизация со временем и навигационным модулем (скорость записи координат 10 раз в секунду). Взлет и посадка осуществляется вертикально, в автоматическом режиме.
Работает устройство следующим образом. Полетное задание автопилота АЭРО-МК формируется в НСУ. Во время пролета над территорией исследования осуществляются измерения модуля полного вектора магнитной индукции, а также синхронизация со временем и автопилотом (скорость записи координат 10 раз в секунду). Одновременно в автоматическом режиме МВС с частотой 40 Гц измеряет модуль полного вектора магнитной индукции в точке установки МВС для учета солнечно-суточных вариаций геомагнитного поля. Взлет и посадка осуществляется вертикально, в автоматическом режиме в заданных точках.
Источники информации:
1. Патент на изобретение RU 2572790.
2. Патент RU 117647.
3. Патент RU 162771 - прототип.
Реферат
Полезная модель предназначена для измерения модуля полного вектора магнитной индукции с беспилотного автопилотируемого летательного аппарата коптерного типа и относится к области аэромагнитных исследований.Беспилотный аэромагнитный комплекс коптерного типа, включающий для измерения модуля полного вектора магнитной индукции магниточувствительный датчик, датчик GPS, стабилизатор, измерительный блок, которые расположены на выпускном диске, подвешенном на тросе.Технический результат – высокоточная магнитометрическая и топогеодезическая съемка с использованием беспилотного комплекса дистанционного мониторинга для построения карт масштабом 1:2000 с точностью измерения модуля полного вектора магнитной индукции до ±0,5 нТл с последующей привязкой карт по данным GPS. 1 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Беспилотный аэромагнитный комплекс (бамк)
Комментарии