Беспилотный аэромагнитный комплекс (бамк) - RU162771U1
Код документа: RU162771U1
Чертежи
Описание
Предлагаемая полезная модель предназначена для измерения модуля полного вектора магнитной индукции с беспилотного автопилотируемого летательного аппарата и относится к области аэромагнитных исследований.
Из существующего уровня техники известен Аэрогеофизический комплекс [1] содержащий размещенные на летательном аппарате блок измерителей параметров геофизических полей и модуль спутниковой навигации, входы-выходы которых подключены к блоку сбора и обработки информации, при этом блок измерителей параметров геофизических полей включает магнитометрический модуль, включающий датчики магнитометрической информации. В качестве летательного аппарата используется двухместный сверхлегкий самолет серии СП-34 массой 495 кг с крейсерской скоростью 100 км/ч с возможностью обеспечения альтитуды полета h=5-15 м над поверхностью земли. Блок измерителей параметров геофизических полей включает, по меньшей мере, три датчика магнитометрической информации, два из которых размещены на крыльях, а третий - на киле хвостового оперения летательного аппарата. Данный комплекс предусматривает использование беспилотного дистанционно управляемого летательного аппарата. Чувствительность датчиков составляет 0,5-1,0 нТл. Корпусы измерителей, размещенных на крыльях, хвостовом оперении и на нижней части фюзеляжа, выполнены обтекаемой формы. Модуль спутниковой навигации выполнен в виде аппаратуры дифференциальных спутниковых систем «Навстар» и/или «Глонасс», которая размещена в фюзеляже летательного аппарата. Блок сбора и обработки информации, выполненный в виде портативного персонального компьютера ноутбук, размещен в фюзеляже и снабжен накопителем информации (RU 117647 U1, опубл. 27.06.2012). Недостатками данного технического решения являются: необходимость наличия или обустройства взлетно-посадочной площадки, вследствие чего ограниченние условий применения; риски, связанные с присутствием людей на борту Аэрогеофизического комплекса и необходимость привлечения высококвалифицированного летного персонала для проведении полетов на сверхмалых высотах. В случае применения дистанционно управляемого беспилотного летательного аппарата имеет место малый радиус действия (при прямой видимости сотни метров) и необходимость наличия хорошего специалиста оператора для координации и привязки пролета летательного аппарата к профилям измерений.
Также из существующего уровня техники известен Квантовый аэромагнитометр [2], который позволяет реализовать чувствительность квантового магнитометра при его использовании на вертолете с жестким креплением магниточувствительного блока к фюзеляжу. В аэромагнитометре используется быстродействующий квантовый магнитометр. Информация от дополнительных измерителей - трехкомпонентного магнитометра, датчиков тока - позволяет эффективно подавлять помехи от эволюции вертолета и от изменения режимов работы его электрооборудования. Винтовая помеха фильтруется в бортовом компьютере. Это исключает необходимость применения датчика оборотов воздушного винта и блока регулировки фазы. (RU 50319 U1, опубл. 27.12.2005). Недостатками данного технического решения являются также как и в предыдущем случае необходимость наличия квалифицированного экипажа и высокая стоимость летных часов. Сложность учета девиации. В труднодоступных районах Западной Сибири, удаленных от мест базирования гражданской авиации, непроизводительные затраты составляют до 40%.
Наиболее близким к заявленному техническому решению в случае применения беспилотного летательного аппарата известен АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС [3], содержащий дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов, радиовысотомер малых высот и вычислитель действительных координат, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую приемную аппаратуру командного радиоуправления, радиоретрансляционную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему посадки и выпуска парашюта, систему управления двигателем, вычислитель системы автоматического управления, радиомаяк, систему диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, а также мобильный наземный пункт управления, содержащий радиотелеметрическую систему, телевизионную систему, стартовую катапульту и пульт управления, при этом радиотелеметрическая система выполнена в виде двух радиостанций, размещенных на дистанционно-пилотируемом летательном аппарате и наземном пункте управления соответственно, каждая из которых содержит последовательно включенные синхронизатор, генератор псевдослучайного кода, синтезатор несущих частот, фазовый манипулятор. (RU 2503038 C1, опубл. 27.12.2013). Недостатком данного измерительного комплекса является возможность появления помех при обмене радиотелеметрической и командной информацией между дистанционно-пилотируемым летательным аппаратом и наземным пунктом управления. Также недостатком является невозможность установки датчиков для измерения магнитного поля земли на корпусе применяемого беспилотного летательного аппарата ввиду наличия в конструкции большого количества магнитных элементов.
Анализ результатов предварительно проведенного патентного поиска позволяет сделать следующие выводы:
а) основное количество патентов посвящено установке магниточувствительных датчиков на различные типы самолетной и вертолетной техники;
б) существуют единичные патенты посвященные установке магнитных датчиков на дистанционно-управляемые беспилотные летательные аппараты, что ограничивает радиус применения.
Задача, на решение которой направлено заявленное техническое решение заключается в расширении арсенала технических средств, в области аэромагнитных исследований, а также позволяющее осуществлять поиски, оценку и мониторинг состояния месторождений полезных ископаемых и техногенно-минеральных образований.
Аппаратная часть БКДМ состоит из: беспилотного летательного аппарата (БПЛА) самолетного типа конструкции «крыло»; расположенного на одном из крыльев магниточувствительного датчика и наземной станции управления.
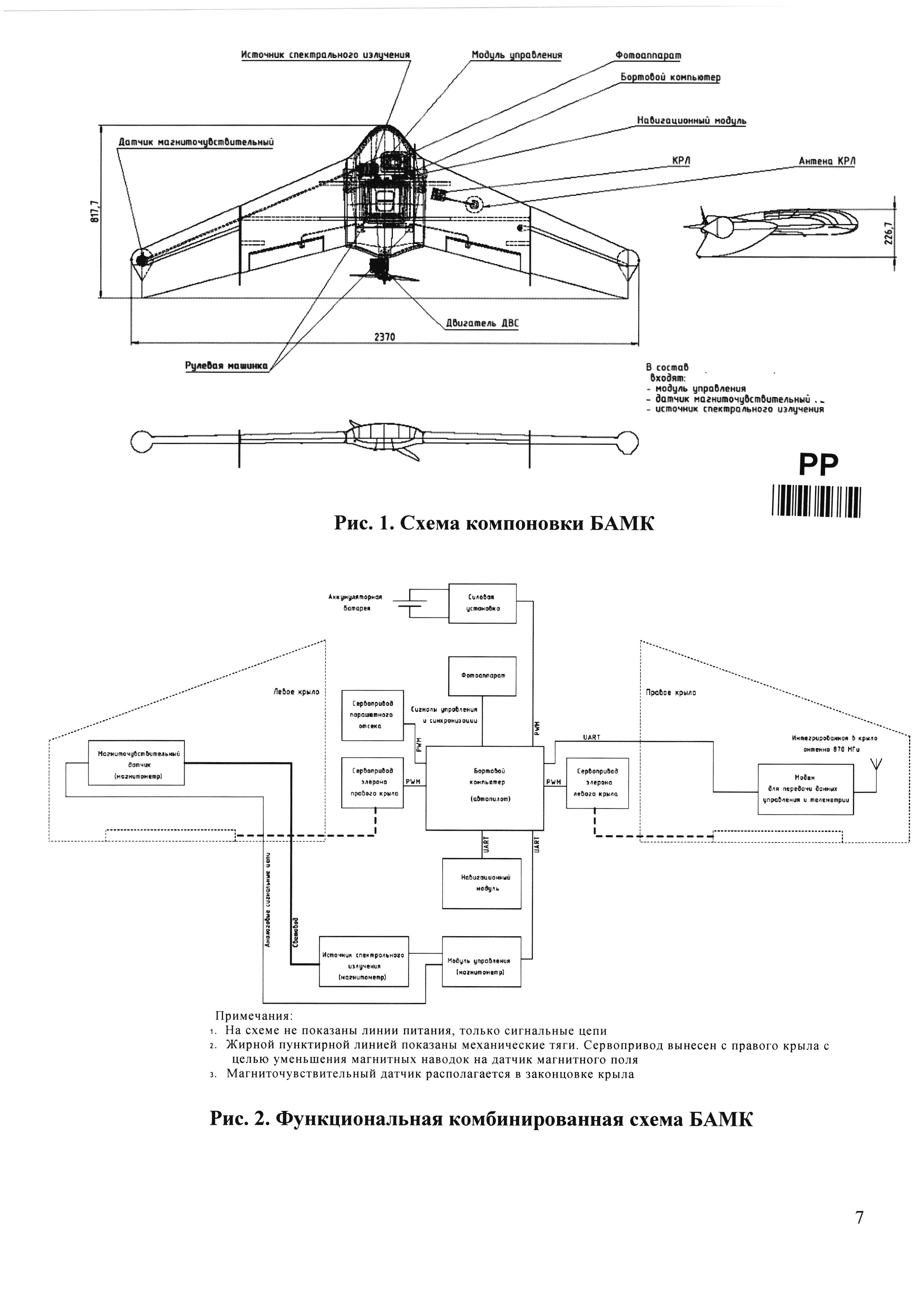
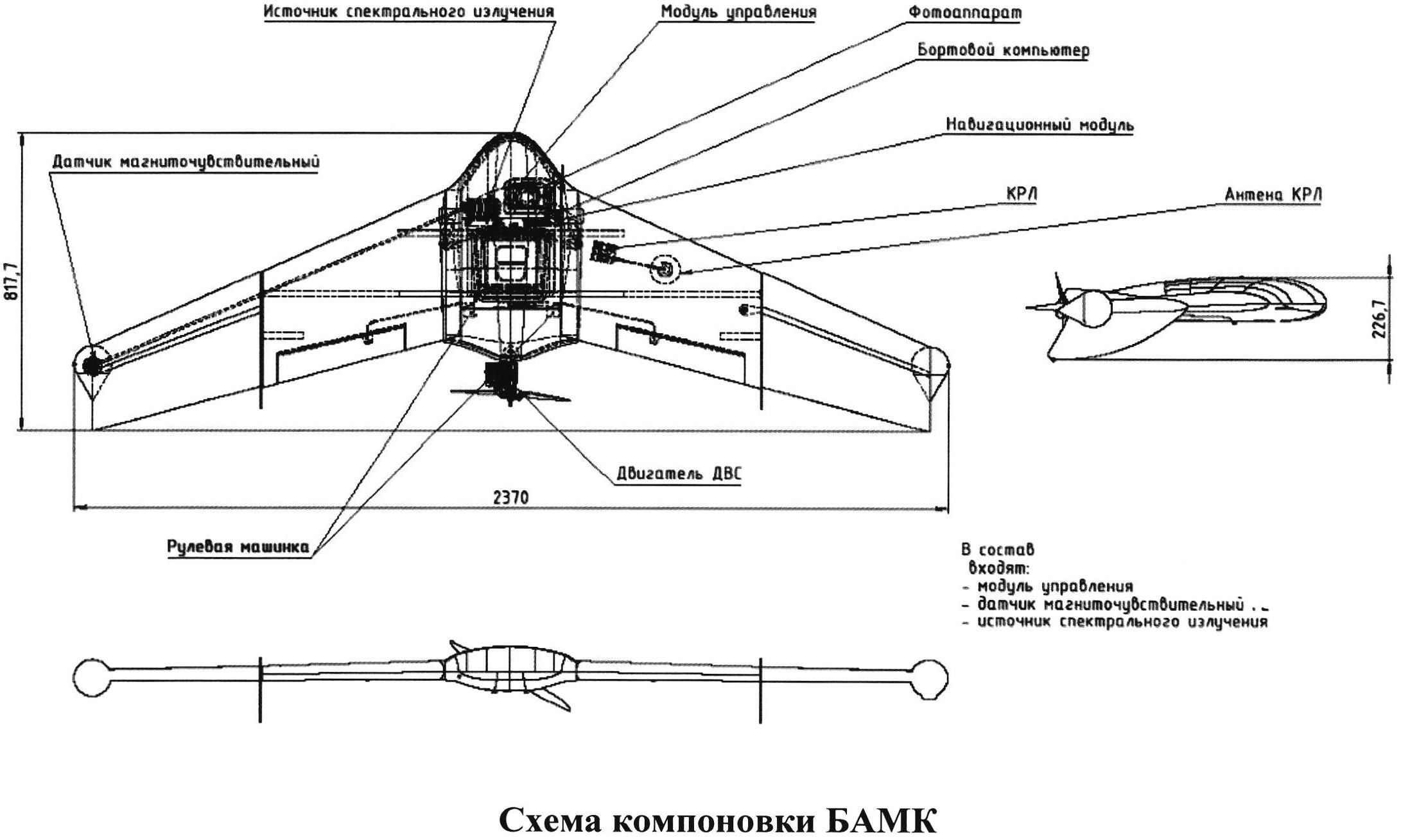
БАМК состоит из: корпуса беспилотного летательного аппарата самолетного типа конструкции «крыло», выполненного из немагнитных (композитных) материалов; двигателя внутреннего сгорания (ДВС), расположенного в задней части корпуса; бортового компьютера и автопилота; магниточувствительного датчика, расположенного на конце любого из крыльев беспилотного летательного аппарата. БАМК предназначен для измерения модуля полного вектора магнитной индукции и относится к области аэромагнитных исследований. Оснащен квантовым рубидиевым магниточувствительным датчиком с оптической накачкой. Сервоприводы, электроника перенесены в центральную часть БПЛА. Электрический двигатель заменен на ДВС компрессионного типа без генератора и стартера, расположенного в задней части БПЛА. БПЛА может представлять собой адаптированный по аэродинамике аппарат легкого типа среднего радиуса действия, взлетная масса которого - от 5 до 7 кг, размах крыльев - до 220 см, радиус действия - 75-100 км, рабочая высота - 50-300 м. Запуск осуществляется с катапульты.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является возможность проведения высокоточной магнитометрической съемки с использованием БАМК для построения карт масштабом 1:10000 с погрешностью измерения модуля полного вектора магнитной индукции до 2 нТл.
Сущность технического решения поясняется чертежами, на которых представлена схема компоновки БАМК с расположением одного магниточувствительного датчика на конце крыла (фиг. 1, 2).
БАМК также включает в себя:
1 - корпус БПЛА,
2 - датчик магниточувствительный,
3 - источник спектрального излучения,
4 - модуль управления,
5 - фотоаппарат,
6 - бортовой компьютер,
7 - навигационный модуль,
8 - КРЛ (командную радиолинию),
9 - антенну КРЛ,
10 - две,
11 - рулевую машинку,
12 - световод.
Данные составные элементы смонтированы на корпусе БПЛА легкого типа среднего радиуса действия конструкции «крыло» с расположением двигателя в задней части.
Работает устройство следующим образом: на месте проведения аэромагнитных исследований собирается катапульта. Полетное задание автопилота БАМК формируется в ПК. Осуществляется запуск с катапульты. Во время пролета над территорией исследования осуществляется комплекс измерений - модуля полного вектора магнитной индукции и мультиспектральных снимков, а также синхронизация со временем и навигационным модулем (скорость записи координат 10 раз в секунду). Посадка БАМК осуществляется посредством парашюта.
Реферат
1. Беспилотный аэромагнитный комплекс (БАМК), включающий для измерения модуля полного вектора магнитной индукции с помощью установленного магниточувствительного датчика на конце крыла беспилотного летательного аппарата (БПЛА), отличающийся тем, что сервоприводы и электроника расположены в центральной части; двигатель внутреннего сгорания (ДВС) компрессионного типа расположен в задней части БПЛА.2. Беспилотный аэромагнитный комплекс (БАМК) по п. 1, отличающийся тем, что магниточувствительным датчиком для установки на БАМК является квантовый рубидиевый датчик с оптической накачкой; использован ДВС без генератора и стартера; в качестве БПЛА использован аппарат самолетного типа конструкции «крыло» легкого типа среднего радиуса действия со взлетной массой - от 5 до 7 кг, размахом крыльев 220 см, радиусом действия 75-100 км, рабочей высотой 50-300 м.
Формула
Комментарии