Хирургический направитель, соответствующий пациенту, и способ его применения - RU2628464C2
Код документа: RU2628464C2
Чертежи

































Описание
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее раскрытие относится к области медицинских устройств и в целом направлено на аппаратуру, настраиваемую для использования относительно конкретного пациента в хирургической ситуации на основе уникальных анатомических особенностей пациента, и на способы ее производства и применения.
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка является частичным продолжением заявки на патент США №13/172683, поданной 29 июня 2011 г., которая в свою очередь заявляет приоритет на предварительную заявку на патент США №61/359710, поданную 29 июня 2010 г., и №61/393695, поданную 15 октября 2010 г. Настоящая заявка также заявляет приоритет на предварительную заявку на патент США №61/625559, поданную 17 апреля 2012 г. Все эти заявки полностью включены в данный документ посредством ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Принимая во внимание сложности хирургических процедур и различные приспособления, инструменты, имплантаты и другие устройства, используемые в этих процедурах, а также переменные анатомические дифференциации между пациентами, которые получают эти приспособления, инструменты, имплантаты и устройства, зачастую сложно создать план хирургической операции, который учитывает уникальные, а иногда нестандартные анатомические особенности конкретного пациента. Например, имплантация транспедикулярных винтов в тело позвонка (в качестве вспомогательного или независимого механизма стабилизации) является общепринятой среди хирургов, которые лечат различные патологии позвоночника, и несмотря на то, что эффективность различных конструкций транспедикулярных винтов стала предсказуемой, все еще существует множество сложностей, связанных с размещением и введением транспедикулярных винтов или других креплений кости. Сложности возникают, если хирург не в состоянии рассмотреть костные ориентиры вследствие предыдущей хирургической операции или если анатомия пациента имеет нестандартную форму.
В настоящее время хирурги имеют возможность легко преобразовать данные магнитно-резонансной томографии (МРТ) или данные компьютерной томографии (КТ) в набор данных, считываемый программой автоматизированного проектирования (CAD) и/или программой конечно-элементного моделирования (FEM), который затем может быть использован для создания, например, индивидуального имплантата на основе динамической природы анатомических структур, которым должен соответствовать индивидуальный имплантат. Эти данные, несмотря на использование в настоящее время хирургами для планирования хирургической операции, почти не используются для создания индивидуализированного набора инструментов или других хирургических устройств, которые предназначены для дополнения уникальной анатомии пациента.
Однако известному уровню техники не удалось предложить систему для создания комплекта хирургической аппаратуры на основе набора данных, полученного посредством сканирования МРТ или КТ. Например, использование характерного для пациента набора данных для тела позвонка может позволить хирургу согласовать незначительные вариации в положении и ориентации пластины или других креплений кости, чтобы избежать конкретной костной анатомии или отклонений от нормы в расположении и выравнивании соприкасающихся тел позвонка. В качестве другого примера использование этих наборов данных может также помогать хирургу при выборе необходимой траектории для имплантируемого устройства, чтобы избежать, например, пересечения стенки ножки и нарушения спинального канала во время реальной процедуры. Использование наборов данных позволяет хирургу избежать такого рода ошибок посредством создания индивидуализированных приспособлений и инструментов, которые могут включать конечные упоры или другие особенности по обеспечению безопасности, чтобы избежать чрезмерного закручивания или чрезмерного введения любых имплантируемых устройств. Наборы данных также позволяют хирургу создать соприкасающуюся с пациентом поверхность, которая ориентирована на соответствие одной или нескольким анатомическим особенностям, представленными набором данных, и, следовательно, быстро и эффективно определить местоположение и разместить соприкасающуюся с пациентом поверхность (поверхности) в соответствующем местоположении и ориентации.
Следовательно, преимущественным будет предоставление аппаратуры, подходящей для использования совместно с хирургической процедурой, которая приспосабливается и/или настраивается и/или способна на соответствие ряду анатомических особенностей конкретного пациента и/или одной или нескольким дополнительным аппаратурам для содействия хирургу для безопасного и эффективного завершения хирургической процедуры (процедур), и, которая иным образом значительно снижает, если не устраняет, проблемы и риски, приведенные выше. Другие преимущества над известным уровнем техники будут известны при рассмотрении сущности и подробного описания изобретения и прилагаемой формулы изобретения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним аспектом настоящего раскрытия новая система и способ описываются для разработки индивидуализированной аппаратуры для использования в одной или нескольких хирургических процедурах. Система и способ в соответствии с этим вариантом осуществления используют уникальную морфологию пациента, которая может быть получена при захвате данных МРТ или КТ или других данных для получения одной или нескольких «Соответствующих пациенту» аппаратур, которая включает дополнительные поверхности на основе ряда точек данных из данных МРТ или КТ. Каждая «Соответствующая пациенту» аппаратура соответствует и ориентируется на анатомию самого пациента, необходимые инсерционные траектории (которые могут быть проверены при дооперационной настройке с использованием 3D программного обеспечения CAD, такого как программное обеспечение, раскрытое в WO 2008027549, который полностью включается в данный документ посредством ссылки), и в соответствии с одним вариантом осуществления, описанным в данному документе, другую аппаратуру, используемую во время хирургической процедуры.
Индивидуализированные и комплексные аспекты соответствия этой раскрытой в настоящее время системы предоставляют преимущество над известным уровнем техники, в частности, посредством предоставления ряда точек взаимосвязи и/или соответствия для каждой аппаратуры, которая в свою очередь снижает вероятность разупорядочения, неправильного размещения и последующей ошибки во время хирургической процедуры (процедур).
Соответственно одним аспектом настоящего раскрытия является предоставление способа для подготовки индивидуализированного хирургического устройства или инструмента, который в предпочтительном варианте осуществления включает следующие этапы:
получения данных, связанных с анатомией пациента;
преобразования полученных данных в трехмерный набор (наборы) данных;
определения по меньшей мере одной траектории или пути для упрощения хирургической процедуры, которая должна быть выполнена в отношении пациента;
определения по меньшей мере одной поверхности, связанной с анатомией пациента;
генерирования трехмерного представления индивидуализированного хирургического устройства или инструмента, который включает по меньшей мере одну траекторию пути и поверхность соответствия по меньшей мере одной поверхности, связанной с анатомией пациента; и
изготовления индивидуализированного хирургического устройства или инструмента с использованием трехмерного представления.
В соответствии с другим аспектом настоящего раскрытия система и способ для упрощения хирургической процедуры (процедур) включают следующие этапы:
получения данных, связанных с анатомией пациента посредством сканирования МРТ или КТ;
преобразования данных сканирования МРТ или КТ в трехмерный набор (наборы) данных;
определения одной или нескольких осей или плоскостей ориентирования устройства, которое должно быть сконструировано для использования в упрощении хирургической процедуры (процедур), которая должна быть выполнена в отношении пациента;
моделирования устройства для использования в упрощении хирургической процедуры (процедур) с использованием определенных осей и с учетом любых других ограничений, полученных из преобразованного набора (наборов) данных;
генерирования прототипа смоделированного устройства, например, посредством использования машинного оборудования быстрого прототипирования;
подготовки прототипа для использования во время хирургической процедуры (процедур).
В соответствии с этим описанным выше аспектом этап способа учета любых других ограничений, полученных из преобразованного набора (наборов) данных, может включать установку размера смоделированного устройства для согласования пространственных ограничений хирургом, ориентирование элементов смоделированного устройства, чтобы избежать определенных анатомических особенностей, создание одной или нескольких поверхностей, которые могут легко быть функционально связаны с одним или несколькими инструментами и/или приспособлениями, используемыми в хирургической процедуре (процедурах) и т.д.
В соответствии с еще одним аспектом настоящего раскрытия система и способ включают использование данных, полученных от аппарата рентгенографии, рентгеноскопии, сверхзвуковой машины или устройства сканирования медицинской радиологии.
В другом аспекте соответствующие пациенту особенности могут быть подтверждены одним или несколькими дополнительными процессами, такими как рентгеноскопия или другие процессы, известные специалистам в данной области техники.
В другом аспекте настоящего раскрытия способ включает использование данных плотности кости, полученных посредством сканирования КТ анатомии пациента, для использования при планировании траектории хирургического шаблона и соответствующего фиксирующего устройства или инструмента, такого как режущий/маршрутизирующий/сверлящий инструмент, направленный на проникновение внутрь костной анатомии. Эти данные могут быть использованы иным образом, рассмотренным и описанным в данном документе, для содействия хирургу в планировании, визуализации или иной подготовке хирургической процедуры для пациента.
В еще одном альтернативном варианте осуществления данные, полученные от одного из устройств сканирования, описанных выше, могут быть дополнены или объединены с данными из сканера плотности кости для изготовления устройства, которое предназначается для пребывания в пациенте после завершения хирургической процедуры. Следует четко понимать, что данные из сканера плотности кости не являются обязательными для применения на практике изобретений, описанных в данном документе, но могут дополнять данные и содействовать хирургу или другому медицинскому специалисту для определения правильного местоположения, траектории, ориентации или выравнивания различной аппаратуры, описанной в данном документе.
В соответствии с еще одним аспектом настоящего раскрытия данные могут быть дополнены или объединены с данными из сканера плотности кости для достижения дополнительной регулировки ориентации любых необходимых осей, в частности, если хирургическая процедура включает введение одного или нескольких имплантируемых устройств.
В соответствии с еще одним вариантом осуществления данные, полученные от пациента, позволяют аппаратуру, которая должна быть произведена посредством определенных проводящих путей через аппаратуру, которые функционально связываются по меньшей мере с одним приспособлением, инструментом или имплантатом и которые позволяют по меньшей мере одно приспособление, инструмент или имплантат, который должен быть введен в определенные проводящие пути последовательным и воспроизводимым образом. Примеры устройств, которые имплантируются или пребывают в пациенте, включают крепежные устройства, такие как винты, штифты, скобы, крючки и т.д., и имплантируемые устройства, такие как распорки, сменные соединения, сменные системы, кейджи и т.д.
В соответствии с еще одним аспектом настоящего раскрытия раскрывается предконфигурированный хирургический шаблон, который включает один или несколько направителей для получения по меньшей мере одного приспособления. В соответствии с этим вариантом осуществления один или несколько направителей также включают соприкасающиеся с пациентом поверхности, сформированные таким образом, чтобы в основном соответствовать анатомическим особенностям пациента. Предконфигурированный хирургический шаблон настраивается таким образом, что соприкасающиеся с пациентом поверхности настраиваются на соприкосновение с рядом анатомических особенностей посредством сопряженного зацепления для гарантирования правильного выравнивания и крепления направителя или шаблона, и направители предконфигурированного хирургического шаблона ориентируются в направлении, выбранном перед производством предконфигурированного хирургического шаблона для достижения необходимого положения, выравнивания или продвижения приспособления внутри одного или нескольких направителей.
В соответствии с еще одним аспектом настоящего раскрытия раскрывается способ для создания шаблона для использования в хирургической операции, включающий следующие этапы:
сбора данных от пациента в соответствии с уникальной анатомией пациента;
создания модели шаблона из собранных данных, при этом модель включает ряд поверхностей соответствия с уникальной анатомией пациента;
предоставления данных, связанных с моделью, для изготовления машинного оборудования;
быстрого генерирования шаблона для включения ряда поверхностей соответствия, а также включения по меньшей мере одной дополнительной поверхности соответствия в соответствии с по меньшей мере одним приспособлением или инструментом, используемым в хирургической операции; и
генерирования постоянного устройства на основе шаблона для использования в хирургической операции.
В одном варианте осуществления настоящего раскрытия модель является цифровой моделью. В другом варианте осуществления настоящего раскрытия модель является физической моделью.
В соответствии с еще одним аспектом настоящего раскрытия раскрывается система для выполнения хирургической процедуры в отношении пациента, включающая:
хирургический направитель;
хирургический направитель, содержащий ряд поверхностей, определенных посредством сканированных данных от пациента, ряд поверхностей, настроенных на соответствие костной анатомии пациента;
хирургический направитель, дополнительно содержащий по меньшей мере одну траекторию или путь, определенный посредством костной анатомии пациента, для упрощения хирургической процедуры;
хирургический направитель, дополнительно содержащий по меньшей мере одну муфту, при этом муфта состоит из проводящего материала и имеет первый конец и второй конец;
инструмент, включающий по меньшей первую часть, состоящую из проводящего материала и приспособленную для приема внутрь по меньшей мере одной муфты посредством введения по меньшей мере первой части в первый конец по меньшей мере одной муфты и соприкосновения с проводящим материалом по меньшей мере одной муфты;
где по меньшей мере первая часть инструмента приспособлена для прохождения через по меньшей мере одну муфту и выход через второй конец по меньшей мере одной муфты; и
где хирургический направитель может быть подвержен электрическому току для предоставления интраоперационного наблюдения (IOМ) за инструментом во время соприкосновения с хирургическим направителем и анатомией пациента.
Следующие аспекты настоящего раскрытия направлены на описанную выше систему и также включают хирургический направитель, который подвергается электрическому току посредством обеспечения по меньшей мере одного электрода на проводящем материале хирургического направителя и подачи электрического тока на по меньшей мере один электрод.
Следующие аспекты настоящего раскрытия предоставляют способ для производства хирургического направителя вне производственной площадки, на месте производственной площадки, в клинике, хирургическом центре, кабинетах хирурга, государственной больнице или частной больнице.
Еще одни аспекты настоящего раскрытия включают хирургический направитель, произведенный с использованием одного из способов, описанных в данном документе, где направитель производится посредством процесса, выбранного из группы, состоящей из машины быстрого прототипирования, машины стереолитографии (SLA), машины избирательного лазерного спекания (SLS), машины избирательного теплового спекания (SHM), машины моделирования (FDM) методом наплавления, машины прямого лазерного спекания (DMLS) металлов, печатной (РР) машины с порошковым основанием, машины цифровой оптической обработки (DLP), струйной смоляной машины для печати фотографий, машины электронно-лучевого плавления (ЕВМ).
Следующие патенты США и заявки на патент США, полностью включенные в данный документ посредством ссылки, в целом направлены на способы и аппаратуру, которые относятся к хирургическим процедурам, таким образом, предоставляя поддержку посредством письменного описания различных аспектов настоящего раскрытия. Патенты США и заявки, находящиеся на рассмотрении, включенные посредством ссылки, представлены далее: Патенты США №7957824, №7844356 и №7658610 и публикации патентов США №2010/0217336, №2009/0138020, №2009/0087276 и №2008/0114370.
Специалистам в данной области техники будет ясно, что варианты осуществления настоящего раскрытия могут иметь различные размеры. Размеры различных элементов вариантов осуществления настоящего раскрытия могут иметь размер на основе различных факторов, включая, например, анатомию пациента, особы или другого устройства, взаимодействующего с или иным образом использующего аппаратуру, местоположение хирургического поля, физические особенности устройств и инструментов, используемых совместно с устройствами, описанными в данном документе, включая, например, ширину, длину и толщину, и размер хирургической аппаратуры.
Варианты осуществления настоящего раскрытия представляют несколько преимуществ над известным уровнем техники, включая, например, скорость и эффективность процедуры, минимально инвазивные аспекты процедуры, одноразовость устройств-прототипов, возможность внедрения индивидуализированных принадлежностей или приспособлений в операционное поле с минимальным риском и повреждением окружающих тканей, более низкий риск инфекции, более оптимальное размещение и/или ориентирование направителя и имплантируемых устройств, более стабильный и регулируемый способ размещения и введения аппаратуры, связанной с хирургической процедурой, который впоследствии снижает вероятность смещения или перемещения аппаратуры, и меньшее количество и/или более дешевые приспособления и инструменты в операционном поле среди прочих преимуществ. Например, варианты осуществления снижают количество и необходимость нескольких лотков, инструментов и устройств различного размера, используемых в конкретной хирургической операции, следовательно, снижая стоимость оборудования, необходимого для совершения хирургической операции. Варианты осуществления также снижают суммарное излучение в отношении хирурга и медицинских работников в операционной среде и пациента.
Специалистам в данной области техники будет ясно, что варианты осуществления настоящего раскрытия могут быть сконструированы из материалов, которые предоставляют или предварительно производятся для предоставления различных аспектов настоящего раскрытия. Эти материалы могут включать, например, нержавеющую сталь, титановый сплав, алюминиевый сплав, сплав хрома и другие металлы или металлические сплавы. Эти материалы могут также включать, например, РЕЕК, углеродное волокно, пластик на основе акрилонитрила, бутадиена и стирола, полиуретан, полиэтилен, фотополимеры, смолы, в частности, каучук из смолистых материалов, заключенных в волокно, латекс, синтетический каучук, синтетические материалы, полимеры и натуральные материалы.
Специалистам в данной области техники будет ясно, что варианты осуществления настоящего раскрытия могут быть использованы совместно с устройствами, которые используют автоматическое или полуавтоматическое управление. Варианты осуществления настоящего раскрытия могут быть сконструированы таким образом, что аппаратура может быть сформирована и проверена, например, удаленно посредством оператора, удаленно посредством оператора через компьютерный контроллер, оператором с использованием дозирующих устройств, программным путем посредством компьютерного контроллера, посредством механизмов с сервоуправлением, посредством механизмов с гидравлическим приводом, посредством механизмов с пневматическим приводом или посредством пьезоэлектрических приводов. В целях настоящего раскрытия следует четко понимать, что другие типы машинного оборудования, отличные от машинного оборудования быстрого прототипирования, могут быть использованы в системах и способах, описанных в данном документе, например, посредством машинного оборудования числового программного управления (CNC).
Раздел «Сущность изобретения» не направлен и не должен быть рассмотрен в качестве представления полного размера и объема настоящего раскрытия. Настоящее раскрытие изложено в различных степенях подробно в разделе «Сущность изобретения», а также на прилагаемых графических материалах и в разделе «Подробное описание изобретения», и включение или исключение элементов, компонентов и т.д. в этом разделе «Сущность изобретения» не предполагает ограничение объема настоящего раскрытия. Дополнительные аспекты настоящего раскрытия станут более понятны после рассмотрения раздела «Подробное описание», в частности, при рассмотрении совместно с графическими материалами.
Вышеописанные преимущества, варианты осуществления и/или характеристики не обязательно являются полными или исчерпывающими, в частности, относительно патентоспособного объекта, раскрытого в данном документе. Другие преимущества, варианты осуществления и/или характеристики настоящего раскрытия также могут быть использованы отдельно или в сочетании, как указано выше и/или описано на прилагаемых фигурах и/или далее в описании. Однако формула изобретения, указанная ниже в данном документе, определяет изобретение.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Прилагаемые графические материалы, которые включены в и составляют часть спецификации, иллюстрируют варианты осуществления раскрытия и вместе с общим описанием раскрытия, приведенным выше, и подробным описанием графических материалов, приведенным ниже, предназначены для пояснения принципов раскрытий.
Следует понимать, что графические материалы не обязательно выполнены в масштабе. В определенных случаях детали, которые не являются необходимыми для понимания раскрытия или которые усложняют восприятие других деталей, могут быть опущены. Разумеется, следует понимать, что раскрытие не обязательно ограничивается конкретными вариантами осуществления, проиллюстрированными в данном документе.
На графических материалах:
На фиг. 1 показан вид в перспективе трехмерной модели уникального группирования анатомических особенностей, из которых может быть получен набор точек данных, в соответствии с одним вариантом осуществления настоящего раскрытия;
На фиг. 2 показана блок-схема, на которой показаны различные этапы выполнения способа производства и использования аппаратуры для упрощения хирургической процедуры в соответствии с одним вариантом осуществления настоящего раскрытия;
На фиг. 3 показан вертикальный вид сбоку конкретной аппаратуры для упрощения хирургической процедуры в соответствии с одним вариантом осуществления настоящего раскрытия;
На фиг. 4 показан вертикальный вид сзади аппаратуры, показанной на фиг. 3;
На фиг. 5 показан вид сверху аппаратуры, показанной на фиг. 3, относительно уникального группирования анатомических особенностей в соответствии с одним вариантом осуществления настоящего раскрытия;
На фиг. 6 показан вид в перспективе аппаратуры и уникального группирования анатомических особенностей, показанных на фиг. 5;
На фиг. 7 показан другой вид в перспективе аппаратуры, показанной на фиг. 3, демонстрирующий индивидуализированные соответствующие пациенту поверхности аппаратуры;
На фиг. 8 показан вид в перспективе аппаратуры в соответствии с альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 9 показан вид в перспективе аппаратуры в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 10 показан другой вид в перспективе аппаратуры, показанной на фиг. 3, наряду с индивидуально изготовленным инструментом для использования во время конкретной хирургической процедуры;
На фиг. 11А-В показаны виды в перспективе аппаратуры в соответствии с другим альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 12 показан вид в перспективе аппаратуры, показанной на фиг. 11А-В, в собранном состоянии;
На фиг. 13 показан вид в перспективе аппаратуры в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 14 показан вид в перспективе аппаратуры в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 15 показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 16 показан отличный вид в перспективе аппаратуры, показанной на фиг. 15;
На фиг. 17 показан вид в перспективе в разобранном виде аппаратуры, показанной на фиг. 15;
На фиг. 18-19 показаны виды в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
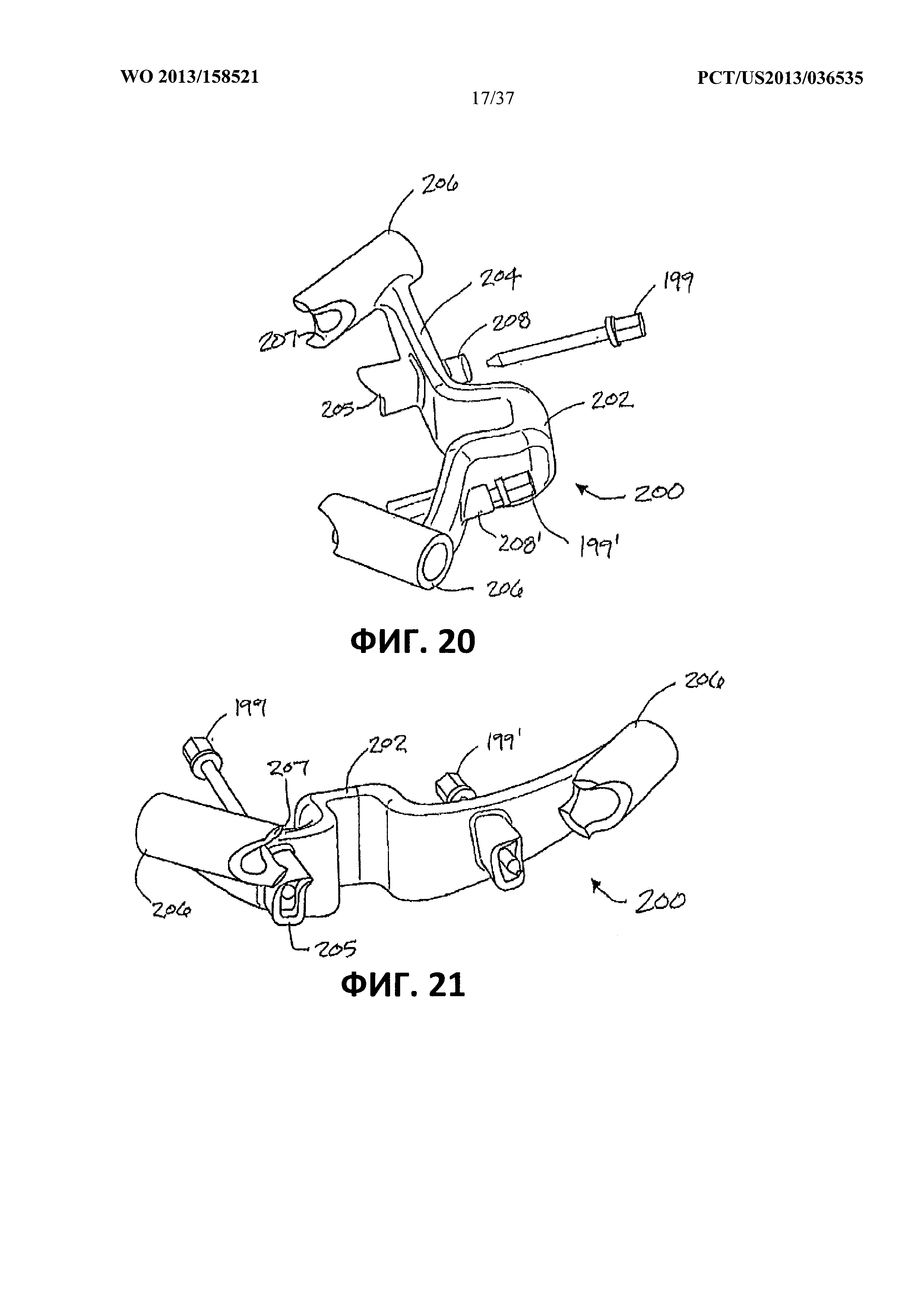
На фиг. 20-21 показаны виды в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 22 показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 23 показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 24 показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 25 показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 26А показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 26В показан вид в перспективе в соответствии с вариантом осуществления, показанным на фиг. 26А;
На фиг. 27А показан вертикальный вид спереди в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 27В показан вид в перспективе в соответствии с вариантом осуществления, показанным на фиг. 27А;
На фиг. 28 показан вертикальный вид в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
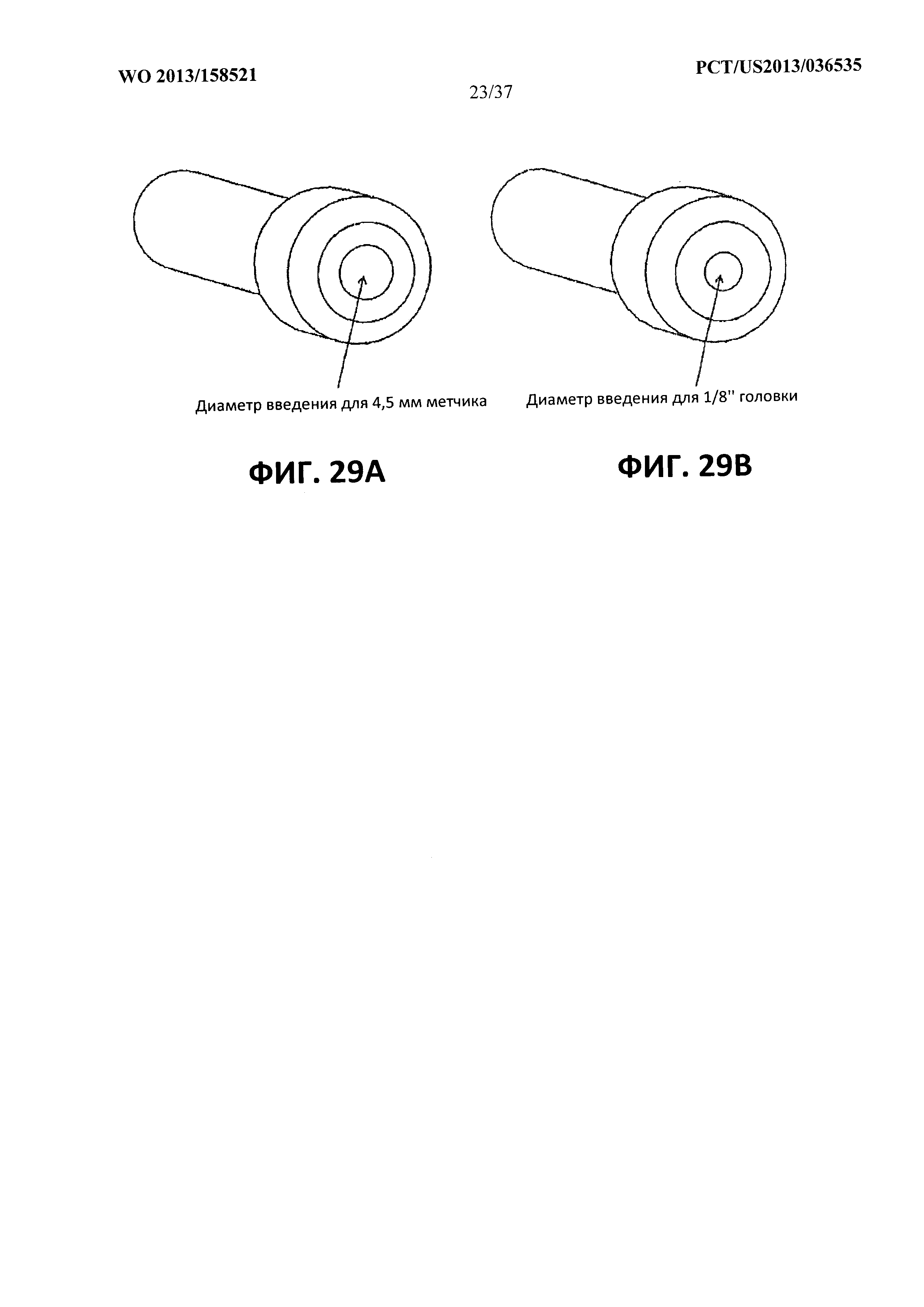
На фиг. 29А показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 29В показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 30 показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 31 показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 32А показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 32В показан вид в перспективе в соответствии с вариантом осуществления, показанным на фиг. 32А;
На фиг. 33А показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 33В показан вид в перспективе в соответствии с вариантом осуществления, показанным на фиг. 33А;
На фиг. 33С показан другой вид в перспективе в соответствии с вариантом осуществления, показанным на фиг. 33А, изображенный с направителем для разреза, показанным на фиг. 32А;
На фиг. 34А показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 34В показан вид в перспективе в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 35 показан вид сверху в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 36 показан подробный вид устройства в соответствии с вариантом осуществления, показанным на фиг. 35;
На фиг. 37 показан другой вид сверху устройства в соответствии с вариантом осуществления, показанным на фиг. 35;
На фиг. 38 показан вид сверху в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия;
На фиг. 39 показан другой вид сверху устройства в соответствии с вариантом осуществления, показанным на фиг. 38;
На фиг. 40A-D показаны дополнительные виды сверху устройств в соответствии с вариантами осуществления, показанными на фиг. 35-39;
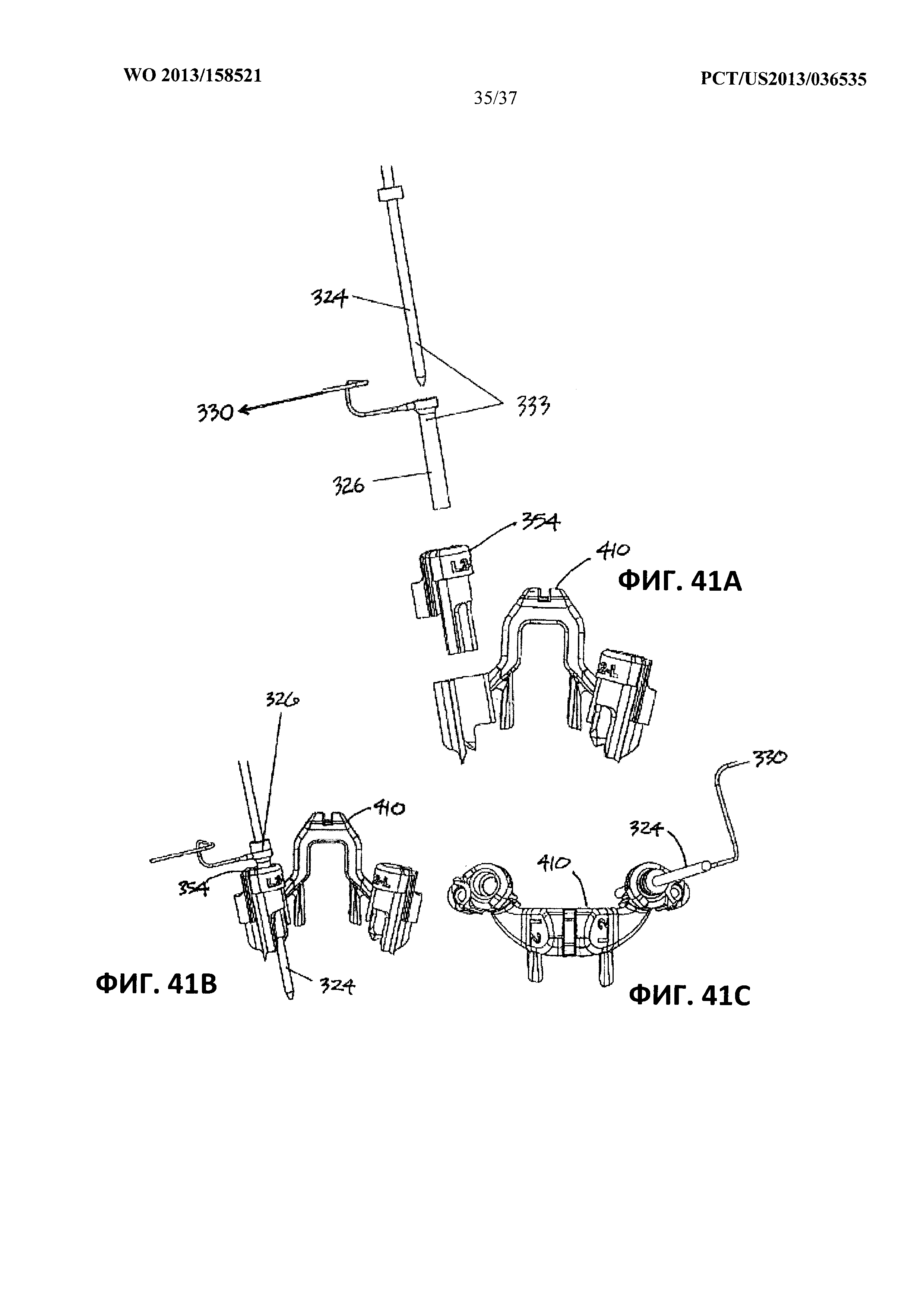
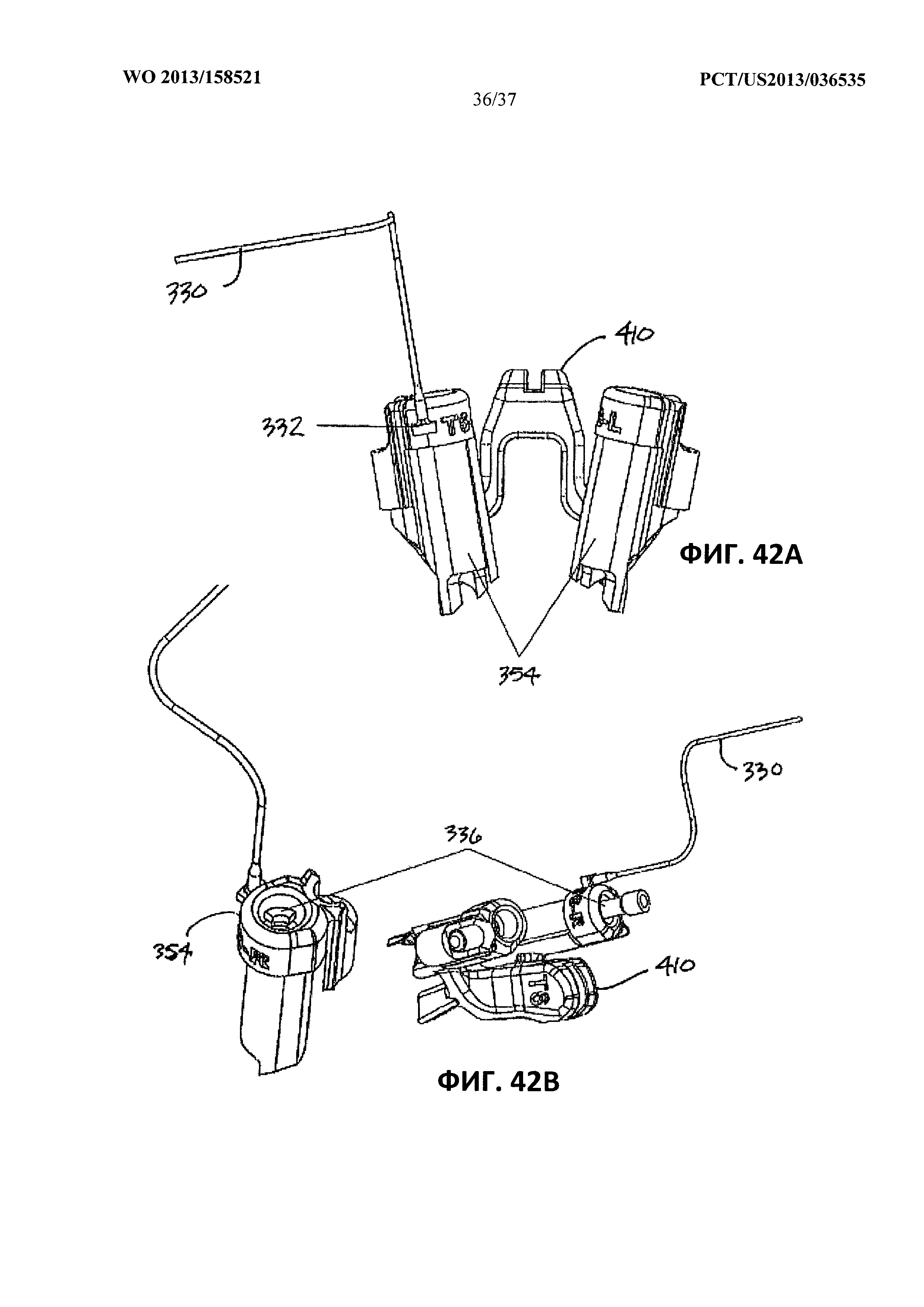
На фиг. 41А-С показаны виды в перспективе устройств и инструментов в соответствии с одним альтернативным вариантом осуществления настоящего раскрытия, который включает датчик EMG и возможность передачи данных EMG на аппаратуру наблюдения;
На фиг. 42А-В включены дополнительные виды в перспективе варианта осуществления, показанного на фиг. 41А-С; и
На фиг. 43 показана диаграмма этапов способа для изготовления устройства или инструмента в соответствии с альтернативным вариантом осуществления настоящего раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
Как показано на прилагаемых фигурах и описано более подробно в данном документе, настоящее раскрытие относится к новой системе и способу для разработки ряда индивидуализированной соответствующей пациенту аппаратуры для использования в различном количестве хирургических процедур. Система и способ используют уникальную морфологию пациента, которая может быть получена путем захвата данных МРТ или данных КТ для получения одной или нескольких соответствующих пациенту аппаратур, которые включают дополнительные поверхности к тем, что встречаются во время хирургической процедуры (процедур), как было получено из набора точек данных. В соответствии с различными вариантами осуществления, описанными в данном документе, соответствующая пациенту аппаратура может также включать необходимые оси и/или инсерционные траектории. В соответствии с одним альтернативным вариантом осуществления, описанным в данном документе, соответствующая пациенту аппаратура может также соответствовать по меньшей мере другой аппаратуре, используемой во время хирургической процедуры. Другие особенности раскрытия станут понятны после рассмотрения следующих раскрытий и отличающихся вариантов осуществления изобретения.
Множество вариантов осуществления раскрытия изображены на фиг. 1-43. Рассмотрим далее фиг. 1, на которой показан вид в перспективе трехмерной модели уникального группирования анатомических особенностей в соответствии с одним вариантом осуществления настоящего раскрытия. На фиг. 1 модель 2 состоит из нескольких тел 4, 6 позвонка, но в соответствии с другими вариантами осуществления может состоять из любого анатомического группирования для конкретного пациента. Данные, связанные с моделью 2 могут быть захвачены из сканирования МРТ или КТ или рентгенографических изображений соответствующей костной анатомии пациента (или в качестве альтернативы из других источников данных). Данные после захвата могут быть преобразованы с использованием известных программных средств в программу CAD, где набор данных является представлением модели 2 и может быть использован для предоставления дополнительных точек данных для формирования контуров, размеров, форм и ориентации одной или нескольких аппаратур, которые должны быть использованы в хирургической процедуре.
В соответствии с альтернативным вариантом осуществления данные могут быть получены из сверхзвукового устройства или устройства сканирования медицинской радиологии. В еще одном альтернативном варианте осуществления данные могут быть дополнены или объединены с данными из сканера плотности кости для изготовления устройства, которое предназначено для пребывания в пациенте после завершения хирургической процедуры, или в качестве альтернативы для достижения дополнительной регулировки ориентации любых необходимых осей, в частности, если хирургическая процедура включает введение одного или нескольких имплантируемых устройств.
На фиг. 2 показана блок-схема, на которой показаны различные этапы выполнения способа производства аппаратуры в соответствии с различными вариантами осуществления, описанными в данном документе, для использования в упрощении хирургической процедуры. Способ в соответствии с предпочтительным вариантом осуществления включает следующие этапы:
A) Получение данных, связанных с анатомией пациента путем сканирования МРТ или КТ;
B) Преобразование данных сканирования МРТ или КТ в трехмерный набор (наборы) данных;
C) Определение одной или нескольких осей ориентации устройства, которое должно быть сконструировано для использования в упрощении хирургической процедуры (процедур), которая должна быть выполнена в отношении пациента;
D) Моделирование устройства для использования в упрощении хирургической процедуры (процедур) с использованием определенных осей и с учетом любых других ограничений, полученных из преобразованного набора (наборов) данных;
E) Генерирование прототипа смоделированного устройства, например, с использованием машинного оборудования быстрого прототипирования; и
F) Подготовка прототипа для использования во время хирургической процедуры (процедур).
Как показано на фиг. 2, способ может включать дополнительные этапы или может быть повторен для дополнительных устройств, используемых в хирургической процедуре. Этап получения данных, как правило, выполняется традиционным образом посредством сканирования пациента с использованием МРТ или КТ или другого подходящего оборудования сканирования, известного в данном уровне техники. Затем данные захватываются оборудованием и могут быть преобразованы в трехмерный набор (наборы) данных посредством программного обеспечения или других алгоритмических средств, известных в данном уровне техники, например, посредством экспортирования данных в известную программно-реализованную программу моделирования, которая позволяет представление данных, например, в формате CAD. После преобразования этих данных устройство может быть смоделировано для дополнения набора (наборов) данных и ориентировано посредством одной или нескольких осей, определенных хирургом ранее или путем изучения набора (наборов) данных из первоначального сканирования анатомии пациента.
Этап способа учета любых других ограничений, полученных из преобразованного набора (наборов) данных, может включать установку размера смоделированного устройства для согласования пространственных ограничений хирургом, ориентирование элементов смоделированного устройства, чтобы избежать определенных анатомических особенностей, создание одной или нескольких поверхностей, которые могут легко быть функционально связаны с одним или несколькими инструментами и/или приспособлениями, используемыми в хирургической процедуре (процедурах) и т.д. Прототип может быть сгенерирован с использованием известного машинного оборудования быстрого прототипирования или в качестве альтернативы фрезерного машинного оборудования, такого как фрезерная машина CNC. В качестве альтернативы первоначальное устройство, изготовленное посредством этого способа, может находиться во временном состоянии для последующего рассмотрения и/или управления хирургом, а затем в конечном счете сконструировано с использованием одной из методологий, описанных в данном документе. Этапы могут быть повторены для дополнительных устройств, некоторые или все из которых могут включать дополнительные поверхности соответствия для анатомии пациента или для ранее изготовленных устройств (например, изготовленные устройства могут иметь поверхности соответствия для соединения вместе одного или нескольких устройств, как описано более подробно ниже).
В качестве альтернативы система и способ, описанные в данном документе, могут упростить выравнивание различных анатомических особенностей для конкретного пациента, таких как, например, нескольких тел позвонка у пациента для исправления спинальных нарушений. Например, набор (наборы) данных может предоставить первоначальное местоположения для анатомических особенностей, но затем может быть обработан хирургом при дооперационной настройке для создания необходимого набора (наборов) данных, такого как конечное местоположение для анатомических особенностей после завершения хирургической процедуры (процедур). Таким образом, устройства, сформированные системой и способом, описанными выше, могут быть использованы как в первоначальном местоположении, так и в конечном местоположении для анатомических особенностей, и могут соответствовать этим характерным местоположениям и ориентациям для каждого этапа хирургической процедуры. Эти поэтапные устройства в свою очередь предоставят хирургу визуальный направитель для определения степени исправления, достигнутой посредством хирургической процедуры, по сравнению с дооперационным планом. Другие вариации относительно способа настоящего раскрытия описаны в разделе «Сущность изобретения» и включены в прилагаемую формулу изобретения.
Способы изготовления могут включать использование машины быстрого прототипирования, такой как машина стереолитографии (STL), машина избирательного лазерного спекания (SLS) или машина моделирования (FDM) методом наплавления, машина прямого лазерного спекания (DMLS) металлов, машина электронно-лучевого плавления (ЕВМ) или другая машина аддитивного производства. Один пример такой машины быстрого прототипирования выпускается серийно фирмой «3D Systems» и известен в качестве Модели SLA-250/50. Машина быстрого прототипирования выборочно упрочняет жидкую, порошковую или другую незатвердевшую смолу или металл в трехмерную структуру, которая может быть отделена от оставшейся незатвердевшей смолы, промыта/стерилизована и использована непосредственно в качестве аппаратуры. Машина прототипирования принимает отдельные наборы цифровых данных и производит одну структуру в соответствии с каждой из необходимых аппаратур.
Обычно, поскольку стереолитографическое машинное оборудование производит смолу, которая может иметь менее оптимальные механические свойства (которые обычно могут быть неприемлемыми для конкретного хирургического использования), в качестве альтернативы может быть использована машина прототипирования для производства пресс-формы. После подготовки модели может быть использована традиционная машина формования под давлением или вакуумного формования для производства аппаратуры из более подходящего материала, такого как нержавеющая сталь, титановый сплав, алюминиевый сплав, сплав хрома, РЕЕК, углеродное волокно и другие металлы или металлические сплавы.
В соответствии с другим альтернативным вариантом осуществления система и способ могут включать предоставление набора (наборов) данных на машину CNC, которая в свою очередь может быть использована для производства индивидуальной фрезерованной аппаратуры из одного или нескольких механически прочных материалов, перечисленных выше. В еще одном альтернативном варианте осуществления крупносерийное производство аппаратуры в соответствии с вариантами осуществления, описанными в данном документе, может быть достигнуто, например, если конкретная ориентация или траектория введения является распространенной среди большой группы пациентов.
В соответствии с одним конкретным вариантом осуществления настоящего раскрытия система и способ предоставляются для изготовления аппаратуры для использования совместно с рядом хирургических процедур, связанных с позвоночником пациента. Отдельным личностям, которые страдают от дегенеративного заболевания межпозвонковых дисков, природных нарушений позвоночника, грыжи межпозвоночного диска, травм позвоночника или других нарушений позвоночника, зачастую необходима хирургическая операция на пораженной области для облегчения боли отдельной личности и предотвращения последующей травмы. Такие спинальные хирургические операции могут включать удаление поврежденной соединительной ткани, введение тканевого имплантата и/или фиксацию двух или более смежных тел позвонка посредством хирургической процедуры, изменяющейся в зависимости от природы и степени травмы.
Для пациентов с переменными степенями дегенеративного заболевания межпозвонковых дисков и/или сдавлением нерва со связанной болью в нижней части спины, хирургическая операция по спондилодезу или поясничному артродезу («корпородезу») широко используется для лечения дегенеративного заболевания. Корпородез обычно включает дистракцию и/или декомпрессию одного или нескольких межпозвоночных промежутков, за которой следует удаление любых связанных дугоотростчатых суставов или дисков, а затем соединение или «слияние» двух или более смежных позвонков вместе. Корпородез тел позвонка также обычно включает фиксацию двух или более смежных позвонков, которая может быть выполнена посредством внедрения стержней или пластин и винтов или других устройств в позвоночный сустав для соединения различных частей позвонка с соответствующей частью смежного позвонка.
Корпородез может возникать в поясничном отделе, грудном отделе или шейном отделе позвоночника пациента. Корпородез требует приспособлений для доступа к позвонкам и имплантирования необходимого имплантата, любого биоактивного материала и т.д. Такие процедуры зачастую требуют внедрения дополнительных приспособлений и/или инструментов, включая сверла, сверла-направители, приспособления очистки ран, устройства для прополаскивания, тиски, зажимы, катетеры, ретракторы, дистракторы, режущие приспособления, направители для разреза и другие приспособления и инструменты введения/ретракции. Введение, выравнивание и размещение этих приспособлений, инструментов и фиксирующих устройств является критическим для успешного выполнения операции. Таким образом, предоставление индивидуализированного и характерного для пациента приспособления или инструмента увеличивает вероятность того, что хирургическая процедура будет успешно выполнена.
Например, одна конкретная аппаратура, сформированная системой и способом, описанными выше, и, которая может быть использована для конкретной фиксации соответствующей хирургической операции, изображена на фиг. 3 и 4. В соответствии с одним вариантом осуществления настоящего раскрытия аппаратура может иметь форму направителя 10 транспедикулярного винта, которая состоит из срединного тела 12 и двух обычно вытянутых крыльев 14, при этом каждое крыло 14 переходит обычно в цилиндрическую колонну 16. В предпочтительном варианте осуществления каждая из цилиндрических колонн 16 в основном является полой для предоставления возможности введения через нее одного или нескольких типов устройств, как изображено на фиг. 3. Срединное тело 12 также включает продольную полость 20, сформированную вокруг нижней поверхности срединного тела 12 (показанного в виде в перспективе на фиг. 3). Каждая из цилиндрических колонн 16 также включает нижнюю соприкасающуюся с пациентом поверхность 18, 19, которая вместе с продольной полостью 20 предоставляет ряд характерных для пациента контуров для соответствия ряду анатомических особенностей, как описано более подробно ниже.
Контуры и местоположения нижних соприкасающихся с пациентом поверхностей 18, 19 и продольная полость 20 формируются с использованием набора (наборов) данных, преобразованного из сканирования МРТ или КТ пациента. Оставшаяся часть направителя 10 транспедикулярного винта, показанная на фиг. 3 и 4, может быть сформирована таким образом, чтобы отвечать конкретным предпочтениям хирурга. Например, крылья 14 должны лишь быть достаточно длинными для расположения двух цилиндрических колонн 16 в местоположении соответствующих анатомических особенностей, соответствующих пациенту. Крылья могут принимать другие формы, ориентации, толщины и т.д. без отклонения от новых аспектов настоящего раскрытия. Подобным образом, срединное тело 12 должно лишь иметь такой размер, чтобы быть согласованным с продольной полостью 20, и может включать другие расширения, отличные от крыльев 14 для содействия в захвате или управлении направителем 10 транспедикулярного винта при необходимости.
Кроме того, крылья 14 могут быть сделаны из полугибкого или полужесткого материала для создания по меньшей мере частичной посадки с натягом при размещении направителя 10 транспедикулярного винта на соответствующем анатомическом группировании для конкретной хирургической операции. Например, соединение на защелках или посадка с натягом может быть сформирована посредством незначительного отклонения крыльев 14 при размещении двух цилиндрических колонн 16 рядом с суставным нижним отростком, а затем отклонения в необходимое местоположение после расположения крыльев в их конечной ориентации. Следующие аспекты раскрытия в этом отношении описаны более подробно ниже.
На фиг. 5 показан вид аппаратуры, показанной на фиг. 3, относительно уникального группирования анатомических особенностей в соответствии с одним вариантом осуществления настоящего раскрытия. Здесь направитель 10 транспедикулярного винта расположен таким образом, что серединное тело 12 центрально расположено над центральной частью тела 4 позвонка, так что продольная полость 20 сопрягается с контурами остистого отростка 41 для этого конкретного тела 4 позвонка. Подобным образом, цилиндрические колонны 16 расположены по одной на каждой срединной стороне направителя 10 транспедикулярного винта, так что крылья 14 охватывают пластинку дуги позвонка 43 тела 4 позвонка и цилиндрические колонны 16 расположены рядом с суставным нижним отростком 44, 45. Нижняя соприкасающаяся с пациентом поверхность 18, 19 цилиндрических колонн 16 формируется для сопряжения с контурами суставного нижнего отростка 44, 45 и позади суставного верхнего отростка 42.
Таким образом, направитель 10 транспедикулярного винта предоставляет ряд местоположений сопряжения или соответствия, каждое из которых при неправильном расположении повлияет на посадку двух других. В этом аспекте направитель транспедикулярного винта предоставляет заметное улучшение над известным уровнем техники, при котором он может быть слегка повернут, смещен или неправильно размещен и при этом все еще выглядеть для хирурга так, как будто устройство посажено должным образом. Избыточность и множество поверхностей сопряжения гарантируют, что направитель 10 транспедикулярного винта расположен и выровнен должным образом. Если направитель 10 транспедикулярного винта не расположен или не выровнен должным образом, то нижние соприкасающиеся с пациентом поверхности 18, 19 не будут плотно насаждены на каждый из суставных нижних отростков 44, 45 и, следовательно, предотвратят плотную посадку продольной полости 20 на остистом отростке 41.
На фиг. 6 показан вид в перспективе аппаратуры, показанной на фиг. 5. Линии А, В необходимой траектории введения показаны для демонстрации того, что расположение цилиндрических колонн 16 является дополнением к ориентации осей для каждой из цилиндрических колонн 16, которые могут быть независимыми относительно их посадки рядом с суставным нижним отростком 44, 45 (т.е. направление оси относительно нормального может отличаться между цилиндрическими колоннами 16). Ориентация цилиндрических колонн 16 также получена из набора (наборов) данных, описанного выше, и в одном предпочтительном варианте осуществления выбрана на основе ориентации, которая позволит введение фиксирующего устройства (т.е. транспедикулярного винта) в соответствии с местоположением ножки и в направлении, которое предотвратит проход фиксирующего устройства из ножки (т.е. устранит возможность того, что винт будет распространяться через ножку или будет введен под углом, который вызовет выход транспедикулярного винта со стороны ножки).
Индивидуализированные или настроенные соприкасающиеся с пациентом поверхности аппаратуры, показанной на фиг. 3-6, демонстрируются на фиг. 7 посредством вида снизу в перспективе направителя 10 транспедикулярного винта. Здесь нижние соприкасающиеся с пациентом поверхности 18, 19 могут включать динамические контуры, имеющие множество составных радиусов, так что поверхности 18, 19 полностью совместимы с соответствующими анатомическими особенностями позвонков. Таким образом, поверхности в основном соответствуют поверхности позвонков, где цилиндрические колонны 16 должны быть расположены во время хирургической процедуры, и не будут в основном соответствовать отличной поверхности позвонков. Таким образом, хирургу немедленно сообщается, если направитель 10 транспедикулярного винта смещен, поскольку он не будет должным образом сидеть на позвонках.
На фиг. 8 показана аппаратура в соответствии с альтернативным вариантом осуществления настоящего раскрытия. В этом варианте осуществления многоуровневый направитель 10' транспедикулярного винта показан относительно нескольких смежных тел 4, 6, 8 позвонка. Многоуровневый направитель 10' транспедикулярного винта включает множество вторичных крыльев 14' и третичных крыльев 14'', каждое из которых имеет соответствующие цилиндрические колонны 16', 16'' для введения и выравнивания ряда транспедикулярных винтов внутрь смежных секций 6, 8 позвонка. Следует четко понимать, что многочисленные уровни, количество которых больше или меньше трех, могут быть достигнуты без отступления от сущности настоящего изобретения.
На фиг. 9 показана аппаратура в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия, которая состоит из множества секций 12'', 12''', 12''''. Подобно варианту осуществления, показанному на фиг. 8, этот направитель 10'' транспедикулярного винта позволяет осуществлять выравнивание и введение транспедикулярных винтов в многочисленные уровни 4, 6, 8 позвоночника. Однако каждая из многочисленных секций 12'', 12''', 12'''' имеет модифицированное срединное тело, которое включает зацепляющий конец и принимающий конец, так что многочисленные секции 12'', 12''', 12'''' могут быть соединены, как показано на фиг. 9. Принимающий и зацепляющий концы каждой из многочисленных секций 12'', 12''', 12'''' отличаются, так что при сборке может быть достигнут лишь правильный порядок секций 12'', 12''', 12'''' (т.е. секция 12'' может быть соединена только с секцией 12'''). На этой фигуре демонстрируется еще один аспект настоящего раскрытия, в частности, возможность сопрягать или соединять характерные устройства рядом друг с другом для последующей гарантии выравнивания и сопряжения с конкретными анатомическими особенностями, связанными с каждым устройством, а также предоставлять средства для приложения корректирующей силы относительно позвонков и визуализации степени исправления нарушения.
На фиг. 10 показана аппаратура в соответствии с вариантом осуществления, показанным на фиг. 5, с индивидуализированным инструментом, который может быть использован совместно с аппаратурой во время конкретной хирургической процедуры. Например, во время процедуры по спондилодезу, описанной выше, обычным для хирурга является прикрепление одного или нескольких транспедикулярных винтов к позвонкам пациента для достижения необходимого корпородеза тел внутри позвонка. Цилиндрическая колонна 16 может иметь внутренний диаметр, который соответствует постепенно увеличивающемуся внешнему диаметру инструмента 60, так что инструмент 60 может быть продвинут внутрь цилиндрической колонны 16 лишь на предопределенное расстояние, следовательно, предоставляя крепкий упор и в свою очередь предоставляя средство для предотвращения продвижения транспедикулярного винта 62 слишком далеко внутрь костной анатомии пациента. В соответствии с еще одним вариантом осуществления полая часть цилиндрической колонны 16 может иметь секцию с более узким внутренним диаметром (не показанную на фиг. 10), которая соответствует конечному упору, приспособленному для внешнего диаметра инструмента 60 таким образом и в таком местоположении, чтобы предотвратить чрезмерное проникновение инструмента внутрь цилиндрической колонны 16 и, следовательно, предотвратить введение транспедикулярного винта 62 вне безопасного предела.
На фиг. 11 показан вид в перспективе аппаратуры в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия. Здесь аппаратура является направителем 100 транспедикулярного винта, который также включает узкий мост 112 вокруг срединного тела, который позволяет соединение втулки 130 с модифицированным направителем 100 транспедикулярного винта, как показано на фиг. 12. Втулка 130 может включать контурированную нижнюю поверхность, соответствующую остистому отростку пациента (подобную продольной полости варианта осуществления, показанного на фиг. 3), и может быть введена внутрь направителя 100 транспедикулярного винта для соответствия конкретной анатомической особенности для позвонков, оперируемых во время хирургической операции. Таким образом, в этом варианте осуществления втулка 130 в дополнение к нижним соприкасающимся с пациентом поверхностям 118, 119 двух цилиндрических колонн 116 включает по меньшей мере один из соответствующих пациенту контуров и может быть удалена или заменена другими втулками отличного контура при необходимости для хирургических процедур на различных позвонках. В этом варианте осуществления цилиндрические колонны 116 могут также включать одно или несколько отверстий 111 для упрощения визуализации транспедикулярного винта во время его продвижения внутрь цилиндрических колонн 116.
На фиг. 13 показан вид в перспективе аппаратуры для упрощения хирургической процедуры в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия. В этом варианте осуществления аппаратура, сформированная системой и способом, описанными выше, состоит из направителя 150 для разреза для ламинэктомии. Этот направитель для разреза для ламинэктомии также включает по меньшей мере один канал 151 выравнивания для введения проволочного направителя или другого крепежного элемента и паз 152 для разреза для направления пути лезвия или другой режущей кромки. Как и в случае с направителем транспедикулярного винта, описанном выше в отношении фиг. 3, направитель 150 для разреза для ламинэктомии также включает нижнюю соприкасающуюся с пациентом поверхность 155, которая позволяет направителю 150 для разреза для ламинэктомии сопрягаться с одним или несколькими телами позвонка. Несмотря на то, что на фиг. 13 направитель 150 для разреза для ламинэктомии показан обычно в форме прямоугольной призмы, следует четко понимать, что другие геометрические формы для направителя 150 для разреза для ламинэктомии являются в равной степени применимыми на практике и рассматриваются в рамках объема раскрытия.
На фиг. 14 показан еще один альтернативный вариант осуществления настоящего раскрытия. В этом варианте осуществления аппаратура, сформированная системой и способом, описанными выше, состоит из трубчатого ретрактора 160, который также включает нижнюю соприкасающуюся с пациентом поверхность 165. Эта соприкасающаяся с пациентом поверхность 165 может быть сформирована в секции 164 трубчатого ретрактора, который является выборочно удаляемым из цилиндрического тела 163 трубчатого ретрактора 165, так что трубчатый ретрактор 165 может быть повторно использован во многих хирургических операциях, тогда как секция 164 формируется повторно и соединяется с цилиндрическим телом 163 для каждого пациента. Трубчатый ретрактор также включает обычно полый внутренний просвет 162 и по меньшей мере один вывод 161 для управления во время введения и, который способствует хирургу при проверке правильного выравнивания трубчатого ретрактора 160.
На фиг. 15-17 продемонстрирован еще один альтернативный вариант осуществления настоящего раскрытия. В этом варианте осуществления шаблон может включать соответствующий пациенту направитель 180 для упрощения размещения одного или нескольких межтеловых устройств, таких как в качестве примера, а не ограничения, имплантируемый кейдж для внедрения одного или нескольких биоактивных веществ или костного трансплантата или искусственного диска. На фиг. 15 и 16 соответствующий пациенту направитель 180 показан в одном возможном местоположении относительно уникального анатомического группирования (между двумя смежными позвонками) для способствования хирургу в размещении одного или нескольких межтеловых устройств.
На фиг. 17 соответствующий пациенту направитель 180 показан в разобранном виде для демонстрации того, как может быть изготовлен ряд компонентов с использованием системы и способа, описанных выше, для конкретной хирургической процедуры. Эти компоненты включают характерную для пациента вставку 182, муфту-направитель 184 и коннекторы 186, которые в конечном собранном состоянии формируют соответствующий пациенту направитель 180, показанный на фиг. 15.
Рассмотрим далее фиг. 18-19 более подробно, на которых показан другой альтернативный вариант осуществления настоящего раскрытия. В соответствии с этим вариантом осуществления изображен хирургический шаблон 190, который может также включать ряд фиксирующих устройств 198, 198', которые могут быть использованы для закрепления шаблона 190 всевозможными способами. В соответствии с этим вариантом осуществления шаблон 190 включает промежуточную секцию 192, ориентированную на соединение мостом остистого отростка пациента, и может также включать отверстия (не показанные на фиг. 18-19) для введения одного или нескольких фиксирующих устройств 198, 198'. Шаблон 190 может также включать две распространяющиеся в стороны части или «крылья» 194, каждое из которых оканчивается направителем 196. Описание направителей, предоставленных выше, в связи с другими вариантами осуществления, раскрытыми в данном документе, включено, таким образом, посредством ссылки относительно этого варианта осуществления.
В соответствии с вариантом осуществления, показанным на фиг. 18-19, фиксирующие устройства 198, 198' могут быть введены через отверстия (не показанные) в промежуточной секции 192 шаблона 190 для стабилизации и закрепления шаблона 190 на остистом отростке пациента. В соответствии с одним вариантом осуществления направление и ориентация первого фиксирующего устройства 198 отличается от ориентации и направления второго фиксирующего устройства 198' для последующего улучшения стабильности шаблона 190 перед введением и размещением постоянных фиксирующих устройств. В соответствии с еще одним вариантом осуществления отверстия могут быть расположены в местоположениях, отличных от изображенных на фиг. 18-19, и их количество может быть меньше или больше в соответствии с требованиями хирургической операции и характерной костной анатомией пациента.
Рассмотрим далее фиг. 20-21 более подробно, на которых показан еще один альтернативный вариант осуществления настоящего раскрытия. В этом варианте осуществления шаблон 200 также включает две дополнительные поверхности 205 соприкосновения, которые предпочтительно имеют полое начало на соприкасающемся с пациентом конце и распространяющееся через него отверстие для введения фиксирующего устройства 199, 199'. Как описано выше в связи с фиг. 18-19, целью фиксирующих устройств 199, 199' является закрепление шаблона 200 на костной анатомии и упрощение закрепления постоянных фиксирующих устройств (не показанных) посредством ряда направителей 206.
Рассмотрим фиг. 20, на которой шаблон 200 включает выступ 208, распространяющийся от верхней поверхности шаблона 200, для введения первого фиксирующего устройства 199, где выступ 208 является частично полым для согласования формы и длины фиксирующего устройства 199. Выступ 208 распространяется над распространяющейся в сторону частью или «крылом» 204 шаблона 200, как показано на фиг. 20. Выступ 208 может в большей или меньшей степени распространяться над шаблоном, чем показано на фиг. 20, для предоставления крепкого упора против чрезмерного введения фиксирующего устройства 199. Подобным образом, противоположная распространяющаяся в сторону часть или «крыло» шаблона 200 также включает выступ 208' для введения второго фиксирующего устройства 199'.
Учитывая вышеизложенное раскрытие относительно определения и моделирования соприкасающихся с пациентом поверхностей в соответствии с этим вариантом осуществления, шаблон 200 имеет по меньшей мере четыре характерных соприкасающихся с пациентом поверхности 205, 207. Этот вариант осуществления улучшает стабильность и расположение шаблона и позволяет хирургу достичь динамически стабильного хирургического шаблона, который в свою очередь гарантирует, что все постоянные фиксирующие устройства будут расположены и введены в направлении и ориентации, предопределенных для конкретных хирургических требований. Это осуществляется посредством предоставления четырех соприкасающихся с пациентом поверхностей, которые служат в качестве независимых ножек стола и располагаются в различных местоположениях (и в различных плоскостях) относительно костной анатомии пациента для последующего улучшения стабильности и расположения шаблона 200.
В соответствии с вариантом осуществления, показанным на фиг. 18-21, направители и другие соприкасающиеся с пациентом поверхности могут быть расположены на характерной глубине и могут также включать характерные внутренние диаметры для согласования введения временного фиксирующего устройства на регулируемую глубину внутри костной анатомии пациента. Более того, направители могут иметь характерные резьбовые внутренние поверхности для согласования характерного фиксирующего устройства и упрощения введения резьбового фиксирующего устройства, такого как винт. В определенных вариантах осуществления шаблоны могут быть предназначены для характерного пациента для предотвращения чрезмерного проникновения фиксирующих устройств внутрь костной анатомии или упрощения первого набора с регулируемой глубиной фиксирующих устройств для временного закрепленные шаблонов.
В соответствии с еще одним вариантом осуществления каждая из соприкасающихся с пациентом поверхностей может иметь встроенное лезвие с соприкасающейся с пациентом поверхностью разреза, встроенной около по меньшей мере части соприкасающейся с пациентом поверхности для последующей установки и закрепления шаблона на костной анатомии перед введением фиксирующих устройств. Целью лезвия является разрез через мягкую ткань для достижения лучшего соприкосновения шаблона с костью между шаблоном и костной анатомией пациента. Полые части направителей и другие соприкасающиеся с пациентом поверхности шаблона также позволяют расположение мягкой ткани внутри этих полых поверхностей после установки шаблона в необходимом местоположении и последующего прикрепления шаблона к костной анатомии пациента. Лезвие может быть в основном цилиндрическим или кольцевидным для соответствия форме направителя или может быть овальным, многоугольным или иметь другую форму для соответствия соприкасающейся с пациентом поверхности.
Для добавления дополнительной стабильности к посадке и размещению соприкасающихся с пациентом поверхностей, описанных в данном документе, на анатомии пациента поверхности соприкосновения могут также включать один или несколько шипов или зубцов, которые служат для соприкосновения с анатомией пациента и по меньшей мере частичного проникновения в нее для закрепления устройства на месте. В одном варианте осуществления шипы или зубцы могут быть сделаны из одного материала и могут быть на постоянной основе прикреплены к соприкасающимся с пациентом поверхностям. В другом варианте осуществления шипы или зубцы могут быть сделаны из разного материала, такого как был описан в данном документе, и могут быть также выборочно введены в одну или несколько соприкасающихся с пациентом поверхностей при необходимости.
Рассмотрим далее фиг. 22, на которой показан еще один альтернативный вариант осуществления настоящего раскрытия. В соответствии с этим вариантом осуществления шаблон 220 имеет ряд соприкасающихся с пациентом поверхностей 212, 219, которые достигаются посредством использования «плавающего» соответствующего пациенту компонента 214, который может быть введен в один из множества направителей 216 либо перед, либо после расположения первого набора соприкасающихся с пациентом поверхностей 212. Соответствующий пациенту компонент 214 может также включать продольный ключ 218, который соответствует пазу или углублению (не показанному на фиг. 22) в направителе 216 для упрощения правильного расположения (вращательно) соответствующего пациенту компонента 214 относительно шаблона 220.
Таким образом, в соответствии с этим вариантом осуществления шаблон 220 может быть закреплен в первом положении с использованием по меньшей мере двух фиксирующих устройств (не показанных), закрепляющих шаблон 220 в необходимом местоположении, а затем ряд соответствующих пациенту компонентов 214 может быть введен в направители 216 шаблона 220 и посажен около двух отличных местоположений костной анатомии пациента.
Рассмотрим далее фиг. 23, на которой показан еще один вариант осуществления настоящего раскрытия, где инструмент 240 может быть использован для упрощения введения шаблона 230 в соответствии с различными вариантами осуществления, раскрытыми в данном документе. Инструмент 240 предпочтительно состоит из рукоятки 242 и выдвижной руки 244, длина которой может изменяться в зависимости от анатомических особенностей характерного пациента и/или предпочтений хирурга. На дальнем конце выдвижной руки 244 находится вывод 246, который формируется для соответствия соответствующему пазу 236, расположенному на одной поверхности шаблона 230. На практике инструмент 240 может быть соединен с шаблоном 230 и использован для введения и размещения шаблона 230 внутри операционного поля пациента.
Рассмотрим далее фиг. 24, на которой показан другой альтернативный вариант осуществления настоящего раскрытия. В соответствии с этим вариантом осуществления может быть предоставлен шаблон 250, который не является характерным для пациента (но в альтернативном варианте осуществления может являться характерным для пациента), а также предоставляет средство прикрепления ряда характерных для пациента компонентов 254 к шаблону 250. Как показано на фиг. 24, компоненты 254 могут быть закреплены на шаблоне 250 посредством выравнивания отверстий 252, 258 и прикрепления одного или нескольких крепежных устройств (не показанных на фиг. 24), таких как винт, штифт или другое подобное устройство. После крепления компонентов 254 на шаблоне 250 соприкасающиеся с пациентом поверхности 262 могут быть использованы для направления и размещения шаблона 250 со встроенными компонентами 254 в необходимом местоположении. Таким образом, стандартный шаблон 250 может быть предоставлен до получения каких-либо данных о пациенте и объединен с характерными для пациента компонентами 254, которые формируются после захвата анатомических данных о пациенте, следовательно, устраняя индивидуальную механическую обработку или изготовление шаблона для характерного хирургического применения.
В соответствии с этим вариантом осуществления шаблон 250 может быть повторно использован или может быть одноразовым в альтернативном варианте осуществления. Шаблон 250 может состоять из любых материалов, перечисленных в данном документе, но в предпочтительном варианте осуществления формируется из металла, металлического сплава или полимерного материала. В соответствии с еще одним альтернативным вариантом осуществления компоненты 254 могут быть защелкнуты на месте или иметь соединение фрикционной посадки и, следовательно, не требуют винтов или других крепежных устройств для прикрепления к шаблону 250. В еще одном альтернативном варианте осуществления шаблон 250 может быть предоставлен в различных установленных размерах и ориентациях для охвата разнообразия в анатомии пациента и телах позвонка различного размера (относительно различных уровней или областей позвоночника пациента).
Рассмотрим далее фиг. 25 более подробно, на которой показан другой вариант осуществления настоящего раскрытия. В этом варианте осуществления шаблон 270 имеет ряд соприкасающихся с пациентом поверхностей 276, 278, а также включает ряд зажимов 272 для крепления шаблона 270 к остистому отростку пациента. В соответствии с этим вариантом осуществления каждый зажим 272 имеет соприкасающуюся с пациентом поверхность 274 (предназначенную здесь для соприкосновения с остистым отростком около каждой боковой стороны) для крепления шаблона на необходимом местоположении анатомии пациента. Каждый из зажимов 272 может быть расположен сбоку относительно шаблона 270 (показанного в вертикальном виде) и прикреплен к установленному положению относительно тела шаблона 270. Зажим 272 может быть закреплен в фиксированном местоположении относительно остистого отростка рядом известных средств, включая замковый механизм, храповой механизм, механизм сопротивления с характерным направлением или натяжной механизм выборочного разъединения. В этом варианте осуществления зажимы 272 позволяют балансировку противоположных сил, возникающих в костной анатомии, относительно шаблона 270 пациента. Зажимной механизм в свою очередь гарантирует и поддерживает выравнивание шаблона 270 относительно костных поверхностей, следовательно, гарантируя точность относительно введения постоянных фиксирующих устройств. Зажимы могут принимать ряд форм или вариантов осуществления, включая штифты, затворы или любой другой тип противостоящих поверхностей, которые прилагают контактные стабилизирующие силы.
В соответствии с одним вариантом осуществления хирургические направители, изображенные на фиг. 24 и 25, могут включать поверхности около соприкасающегося с пациентом конца муфт-направителей (см. 254, фиг. 24) для соответствия мягкой ткани, существующей в фасетном комплексе, где соприкасающийся с пациентом конец муфты-направителя соприкасается с позвонками пациента (см. 278, фиг. 25). Таким образом, в соответствии с этим вариантом осуществления обычно цилиндрическая муфта-направитель (муфты) включает соприкасающуюся с пациентом поверхность, которая имеет сходство с полуцилиндром или частичным цилиндром (как показано на фиг. 24 и 25) во избежание соприкосновения с этой мягкой тканью.
В одном альтернативном варианте осуществления хирургический направитель может также включать одну или несколько частей, которые были вырезаны или могут быть выборочно вырезаны или отломаны для упрощения размещения. Один такой хирургический направитель показан на фиг. 26А и 26В. В соответствии с этим вариантом осуществления хирургический направитель включает ряд соприкасающихся с пациентом поверхностей, одна или несколько из которых была модифицирована для упрощения очистки направителя при размещении внутри местоположения (см. поверхности 282 на фиг. 26А). Более того, хирургический направитель, как описано в данном документе, может содержать один или несколько зажимных элементов для закрепления направителя в предпочтительном местоположении, таких как зажим 284, изображенный на фиг. 26А и 26В.
В соответствии с еще одним вариантом осуществления муфта-направитель (муфты) 254 может также позволить введение одной или нескольких вставок 288, как показано на фиг. 27А и 27В. Эти вставки 288 могут иметь размер с внешними диаметрами для сопряжения с внутренним диаметром муфты-направителя (муфт) 254 и иметь внутреннее отверстие, проходящее в продольном направлении через вставку 288 для согласования головки сверла или метчика (в качестве примера) переменных размеров. На практике вставка 288 может упростить и направить головку сверла для создания направляющего отверстия для последующего введения фиксирующего устройства, такого как винт. В соответствии с одним вариантом осуществления вставки 288 могут также включать одно или несколько устройств индикации для идентификации характерной вставки 288 для конкретного уровня позвоночника пациента или других устройств индикации, указывающих направление, ориентацию, использование или цель вышеуказанной вставки 288.
Рассмотрим далее фиг. 28, на которой вставки 288, снабженные хирургическими направителями для сопряжения с муфтами-направителями 254, могут иметь переменную длину L и могут быть сделаны более длинными или короткими в зависимости от геометрии направителей, анатомии пациента, цели вставки и т.д. Например, если необходима большая глубина конкретного сверла, то вставка 288 может быть более короткой для согласования со следующим проникновением головки сверла внутрь позвонков пациента. Подобным образом, внутреннее отверстие вставки 288 может иметь переменный диаметр в зависимости от точного приспособления или инструмента, который предназначается для использования совместно со вставкой (как изображено на фиг. 29А и 29В). Таким образом, хирург может быть уверен, что он или она использует правильное приспособление, такое как сверло или метчик, с каждой из вставок (которые могут также включать одно или несколько устройств индикации для указания местоположения или характерного использования, предназначенного для вышеупомянутой вставки) при выполнении хирургической процедуры. Следующая иллюстрация принципов, описанных выше, показана на фиг. 29А и 29В, на которых изображена вставка с отверстием, диаметром в 4,5 миллиметра, для размещения инструмента вывода и отверстием, диаметром 1/8 дюймов, для использования совместно с головкой сверла, диаметром 1/8 дюймов, соответственно.
Рассмотрим далее фиг. 30, на которой в соответствии с одним вариантом осуществления вставки 288, описанные выше, могут также включать характерные соприкасающиеся с пациентом поверхности 294 для последующего соответствия вставки 288 в дополнение к муфтам-направителям 254 с характерной для пациента анатомией. Это позволяет лучшую стабильность и расположение вставки 288 и направителя с включенной в него вставкой 288 в предыдущем местоположении. Кроме того, для вставок 288, используемых совместно с головкой сверла или другим вибрационным или колебательным приспособлением, эти соответствующие пациенту поверхности 294 на вставке 288 также предотвращают «ход» или переход дальнего конца головки сверла на поверхность тела позвонка при создании начального направляющего отверстия, следовательно, снижая риск неверной траектории фиксирующего устройства.
В соответствии со следующими вариантами осуществления настоящего раскрытия соприкасающиеся с пациентом поверхности, сформированные одним или несколькими возвышениями, распространяющимися от главного тела хирургического направителя, описанного более подробное выше (и в соответствии с несколькими вариантами осуществления, раскрытыми в данном документе), могут включать острый или полуострый край соприкосновения для проникновения и прикрепления к мягкой ткани, окружающей анатомическую особенность пациента, такую как дугоотростчатый сустав. Поверхности соприкосновения могут в соответствии с этим вариантом осуществления включать углубленные полости для поступления мягкой ткани. Эти углубленные полости создают края вокруг внешней части ножек, которые могут быть острыми или выборочно заостренными для упрощения разреза через мягкую ткань для опоры/сопряжения с подлежащей костью. Это, в частности, является важным для спинальных хирургических процедур, где точное местоположение соприкасающейся с пациентом поверхности должно быть в рамках небольшой доли погрешности и должно оставаться постоянным на протяжении процедуры.
Рассмотрим далее фиг. 31 более подробно, на которой вставка может также включать ключ или выемку 296 вокруг одной поверхности обычно цилиндрического тела вставки, которая настраивается на сопряжение с вырезом или пазом 298 на муфте-направителе 254 устройства. Таким образом, гарантируется правильное вращение/ориентация вставки 288 при направлении вставки внутрь полого тела муфты-направителя 254.
Рассмотрим далее фиг. 32А-34В, на которых предоставлены дополнительные иллюстрации направителя для разреза (такого как изображенный на фиг. 13 выше). В соответствии с одним вариантом осуществления направитель для разреза включает ряд характерных соприкасающихся с пациентом поверхностей 302 вокруг по меньшей мере одной поверхности направителя для разреза. Направитель для разреза также включает в предпочтительном варианте осуществления специальную для пациента «дорожку» 303 для упрощения введения режущего инструмента (как показано на фиг. 33А-С) и регулировки глубины введения для этого инструмента для предотвращения излишнего разреза подлежащей поверхности во время конкретной хирургической процедуры посредством дополнительного предоставления одной или нескольких соприкасающихся с инструментом поверхностей 304. В соответствии с вариантом осуществления, показанным в связи с фиг. 32А-34В, направитель для разреза может быть предоставлен для ламинэктомии. В соответствии с другими вариантами осуществления характерный для пациента направитель может быть изготовлен для использования в выполнении корпэктомии, остеотомии (PSO) по удалению ножки, остеотомии (SPO) по Смит-Петерсону, резекции (VCR) позвоночного столба или ассиметричной остеотомии (как в сагиттальной, так и корональной плоскости) среди прочего.
Эти характерные для пациента направители для разреза могут быть изготовлены из анатомических данных о пациенте и могут содействовать в выполнении комплексных процедур с большей достоверностью относительно их исхода. Например, определенные остеотомии, в частности, PSO и SPO, требуют высокого навыка хирурга и зачастую являются трудоемкими. Это частично вследствие близкого взаимоотношения сосудистых и нервных элементов с костными структурами, что создает навигационные трудности для хирурга для безопасного и эффективного осуществления резекции кости во время одной из процедур. Это особенно характерно для заднего доступа. Посредством использования характерного для пациента направителя хирург может подтвердить расположение и выравнивание траектории разреза и пути перед началом процедуры и с учетом раскрытия, предоставленного выше относительно фиг. 32А-34В, может также предоставить степень регулировки глубины, существенную во избежание соприкосновения с сосудистыми или нервными элементами.
В одном варианте осуществления режущее приспособление, связанное с направителем для разреза, показанной на фиг. 32А-34В, как правило, имеет такой тип приспособлений, который в настоящее время используется в хирургических процедурах. В соответствии с другим вариантом специализированный режущий бур или наконечник может быть включен в инструмент для упрощения последующей регулировки расположения и глубины инструмента, как описано более подробно далее. Например, как показано на фиг. 33А-33С, режущая часть инструмента может иметь шаровой манипулятор 308, который предотвращает большее введение инструмента внутрь направителя для разреза, чем необходимо для характерной для пациента процедуры.
Как показано более подробно на фиг. 34А-34В, шаровой манипулятор 308 может быть введен внутрь первой части «дорожки» 303 направителя для разреза, но не должен быть введен во вторую или более глубокую часть «дорожки» направителя для разреза (через которую поверхность разреза должна проходить), следовательно, гарантируя правильную глубину режущего инструмента. Следующие геометрические конфигурации, отличные от тех, что показаны на фиг. 34А-34В, могут быть предоставлены, что позволяет шаровому манипулятору 308 перемещаться в горизонтальном направлении относительно верхней поверхности направителя для разреза и в некоторых случаях вбок или вниз внутри дорожки 303 направителя для разреза. В этом варианте осуществления режущий инструмент, следовательно, должен перемещаться на определенной глубине вокруг анатомии пациента в определенном местоположении «дорожки» 303 направителя для разреза, но достигать большей глубины в других местоположениях вокруг «дорожки» 303 направителя для разреза. Таким образом, разрешенная глубина относительно инструмента относительно направителя для разреза может изменяться вокруг «дорожки» 303 направителя для разреза.
Другие преимущества, достигнутые посредством использования этих характерных для пациента направителей для разреза, включают: предоставление средств для достижения быстрого и регулируемого удаления кости; предоставление пространственной ориентации режущих приспособлений, используемых во время процедуры; гарантирование надлежащей ориентации разрезов, оба из которых осуществляются посредством регулируемого направления инструмента и визуализации во время дооперационного процесса планирования; предоставление точного вычисления исправления нарушения перед осуществлением разреза; предоставление точной резекции кости, которая в свою очередь гарантирует исправление нарушения; ограничения по разрезу с регулируемой глубиной для защиты нервных и сосудистых элементов; вектор регулируемого разреза и предотвращение соприкосновения или травмы с нервными элементами; и возможность предоставления подхода для разрезов в заднем, переднем, заднем боковом, трансфораминальном или непосредственно боковом подходе.
На Фиг.35 показан вид сверху в соответствии с еще одним альтернативным вариантом осуществления настоящего раскрытия. В этом варианте осуществления устройство 310 может предоставить один или несколько соприкасающихся с пациентом элементов, включающих отделенные части 314, которые позволяют размещение фиксирующего устройства (такого как транспедикулярный винт) без отделения устройства от костной анатомии пациента. Отделенный боковой край может быть сформирован посредством создания пазов 315 в поверхностях частей хирургического направителя устройства, которое предоставляет оси перфорации для частей 314, которые должны быть отделены.
В соответствии с этим вариантом осуществления муфта-направитель может быть ассиметричной, что позволит два различных внутренних диаметра: один, который упростит направление ручного приспособления (т.е. сверла, метчика), и один, который согласовывается с выступом или крышкой устройства (такого как тюльпан транспедикулярного винта). После удаления отделенной части 314 муфты-направителя становятся возможными хорошая видимость и путь к позвонку, и предоставляется возможность размещения транспедикулярного винта без удаления направляющего устройства.
На фиг. 36 показан подробный вид устройства в соответствии с вариантом осуществления, показанным на фиг. 35. На фиг. 36 показан подробный вид пазов 315, которые в предпочтительном варианте осуществления могут быть сформированы во время изготовления устройства 310, а в альтернативных вариантах осуществления могут быть сформированы после изготовления устройства посредством перфорации или других методов для создания паза 315 вокруг определенной поверхности муфты-направителя устройства 310.
На фиг. 37-39 показаны дополнительные виды устройства в соответствии с вариантом осуществления, показанным и описанным относительно фиг. 35. На фиг. 37 показана ассиметричная муфта-направитель с двумя отделенными частями 314, отделенными от устройства 310. На фиг. 38 показан вариант осуществления, показанный и описанный относительно фиг. 26А-В, но имеющий в этом случае асимметричную муфту-направитель с отделенными частями 314, как описано выше.
На фиг. 40A-D показаны дополнительные виды в перспективе устройств, описанных выше относительно фиг. 35-39, в соответствии с вариантами осуществления, имеющими по меньшей мере одну или несколько отделенных частей. После удаления отделенные части предпочтительно убираются хирургом.
Каждый вариант осуществления, описанный в данном документе, может быть предоставлен в модульной (т.е. одноуровневой) или монолитной (многоуровневой) конфигурации. Таким образом, для удобства упрощения описания, предоставленного в данном документе, определенные варианты осуществления были показаны в одном (модульном или монолитном) варианте осуществления, но могут быть предоставлены в отличной (монолитной или модульной) конфигурации без отступления от сущности раскрытия. В различных аспектах монолитные варианты осуществления могут везде включать от двух до десяти уровней относительно тел позвонка или охватывать множество местоположений костной анатомии пациента, отличных от позвоночника. Следует четко понимать, что варианты осуществления, описанные в данном документе, предоставляются для иллюстрации определенных вариантов осуществления раскрытия и не предназначены для ограничения объема раскрытия.
В соответствии с различными вариантами осуществления, описанными в данном документе, ряд фиксирующих устройств может быть быстро и легко изготовлен для использования в хирургической или обучающей ситуации, включая без ограничения штифты, винты, крючки, зажимы, стержни, пластины, распорки, клинья, имплантаты и т.д. Подобным образом, ряд инструментов и/или других устройств может быть изготовлен на основе характерных для пациента данных, включая без ограничения соответствующие пациенту вставки, шаберы, режущие инструменты, подъемники, кюретки, кусачки, зонды, отвертки, затворы, храповые механизмы, приспособления для извлечения и спасательные приспособления, катетер, хирургическую сетку и т.д.
Устройства, используемые в качестве имплантатов, включая множество имплантатов, используемых для восстановления высоты дискового промежутка в позвонках пациента, включаются в состав аппаратуры, которая изготавливается с использованием характерных для пациента данных и включают ряд соответствующих пациенту поверхностей. Например, ряд соответствующих пациенту металлических, полимерных или эластомерных имплантатов может быть изготовлен с использованием способов, описанных в данном документе, где определенные соприкасающиеся с пациентом поверхности имплантата аккуратно и точно соответствуют анатомии пациента. В одном варианте осуществления имплантат может соответствовать анатомической особенности пациента, которая дегенерировала и нуждается в восстановлении. В другом варианте осуществления может быть необходим имплантат для исправления структурных или физиологических нарушений, присутствующих в анатомии пациента, и, следовательно, имплантат служит для исправления положений или выравнивания анатомии пациента. Другие имплантаты могут являться характерными для пациента, но не служат в качестве восстанавливающей или другой структурной функции (т.е. случай имплантирования слухового аппарата).
Имплантаты, описанные в данном документе, могут быть произведены через аддитивное производство. В контексте спинальных имплантатов, имплантаты могут быть использованы во всех подходах (переднем, непосредственно боковом, трансфораминальном, заднем, заднем боковом, непосредственно боковом заднем и т.д.). Характерные особенности имплантата могут решить определенные хирургические задачи, например, восстановление лордоза, восстановление высоты диска, восстановление сагиттального или коронального баланса и т.д.
Другие применения, рассмотренные настоящим раскрытием, включают имплантаты межтелового спондилодеза, имплантаты восстановления высоты дискового промежутка, имплантаты, имеющие соответствие отпечатка стопы, максимизацию площади поверхности, соответствие формы и контура с концевыми пластинками или другими позвоночными дефектами, и могут также устанавливать поверхность соприкосновения, такую как относительную шероховатость или другие особенности поверхности. Например, имплантат может быть изготовлен на основе анатомии пациента, которая также включает форму с характерным направлением, так что имплантат без труда может быть насажден через портал доступа и внутрь дискового промежутка. В качестве альтернативы, имплантат может быть изготовлен таким образом, чтобы учитывать анатомические ограничения как в точке имплантата, так и на пути, который должен пройти имплантат, и может также восполнять анатомические дефекты. В контексте спинального имплантата имплантат может также устанавливать необходимый угол исправления лордоза или коронального дефекта, устанавливать характерную для пациента высоту имплантата или (необходимую высоту последующего восстановления высоты диска), устанавливать степень допускаемого расширения (для расширяющихся имплантатов) и может быть однонаправленным или многонаправленным в зависимости от хирургической операции и предпочтения хирурга.
В соответствии с одним вариантом осуществления изготовление соответствующего пациенту устройства может быть использовано для создания соответствующих пациенту позвоночных пластин. В качестве примера, а не ограничения, данные о пациенте могут быть получены для создания поверхностей соответствия одной или нескольких передних шейных или поясничных пластин, используемых для спинальных пластических хирургических операций. Пластины могут включать контуры или особенности поверхности, которые соответствуют костной анатомии, включая поверхности соответствия, охватывающие более одного сегмента или позвонка. В еще одном варианте осуществления данные о пациенте могут быть использованы для создания характерных соответствующих пациенту пластин с идентификаторами для местоположения пластины и могут также включать индивидуальные высверленные отверстия или другие характерные для пациента точки выравнивания. Другие типы пластин, кроме тех, что используются в спинальной хирургической операции и описываются, могут включать соответствующие пациенту особенности, описанные в данном документе, без отступления от настоящего раскрытия.
В соответствии с другим вариантом осуществления раскрытия аппаратура снабжается возможностью наблюдать за одним или несколькими биосигналами во время процедуры с использованием аппаратуры, описанной в данном документе. В предпочтительном варианте осуществления биосигналы, полученные от пациента, содержат по меньшей мере компонент электромиографии (EMG), который может быть измерен и рассмотрен во время по меньшей мере части хирургической процедуры. В альтернативных вариантах осуществления система включает компонент соматосенсорного вызванного потенциала (SSEP) и/или компонент моторного вызванного потенциала (МЕР). Другие модальности наблюдения за нервной системой также рассматриваются совместно с этим вариантом осуществления. Анализ биосигналов может быть выполнен для определения того, правильно ли было размещено фиксирующее устройство или инструмент, такой как головка сверла, или в качестве альтернативы, соприкасается ли устройство или инструмент с нервными элементами, присутствующим рядом с операционным полем.
В соответствии с этим вариантом осуществления одно или несколько устройств или инструментов могут быть связаны с аппаратурой наблюдения, которая получает и передает данные сигнала EMG от пациента через канал измерения от устройства или инструмента. Аппаратура наблюдения предпочтительно получает данные и представляет их пользователю в графической или другой зрительной форме. На основе представления данных, полученных от аппаратуры наблюдения, хирург может определить, получено ли конечное размещение устройства или инструмента в костной анатомии пациента или в мышечной ткани или, например, соприкасается ли устройство или инструмент с нервными элементами.
На практике одно или несколько устройств или инструментов могут включать датчик EMG, такой как электрод, который связан с по меньшей мере одним каналом измерения, который в свою очередь предоставляет данные EMG на аппаратуру наблюдения. Аппаратура наблюдения затем отображает данные, полученные от датчика (датчиков) EMG, и предпочтительно позволяет хирургу или другому медицинскому специалисту сравнить значение, связанное с данными EMG, с предопределенными данными EMG, включая данные EMG, связанные с различными типами ткани. В предпочтительном варианте осуществления предпочтительные данные EMG включают по меньшей мере данные, связанные с мышечной областью, нервной областью, сосудистой областью и костной областью анатомии пациента. Посредством осуществления сравнения измеренных данных EMG с предопределенными данными EMG хирург или другой медицинский специалист может определить, показал ли датчик EMG конкретный тип ткани, который в свою очередь направляет размещение устройства или инструмента, с которым связан датчик EMG.
Рассмотрим далее фиг. 41А-С и 42А-В, на которых изображены различные варианты осуществления устройств и инструментов с возможностью интраоперационного наблюдения (ЮМ). Рассмотрим фиг. 41 А, на которой вариант осуществления включает инструмент, такой как сверло, которое также включает проводящую головку 324 сверла. Головка 324 сверла может быть введена внутрь проводящей муфты 326 для сверла, при этом муфта 326 для сверла имеет электрическую связь 330 с регулятором мощности (не показанным на фиг. 41А). Взаимосвязь между головкой 324 сверла и муфтой 326 для сверла является такой, что они оба имеют жесткий допуск 333, гарантируя в основном постоянное соприкосновение между длиной головки 324 сверла и муфтой 326 для сверла. Муфта 326 для сверла может быть также введена и закреплена внутри муфты-направителя 354, которая в свою очередь может быть прикреплена к хирургическому направляющему устройству 410.
Рассмотрим далее фиг. 41В, на которой после сборки головка 324 сверла и муфта 326 для сверла вводятся внутрь муфты-направителя 354, и головка 324 сверла распространяется через муфту-направитель 354 для предоставления соприкосновения с анатомией пациента. В одном варианте осуществления головка сверла может проникать внутрь ножки пациента, расположенной на позвонках пациента. В предпочтительном варианте осуществления головка 324 сверла также включает обычно цилиндрическую пробку, которая примыкает к пластине, расположенной на дальнем конце муфты 326 для сверла (как показано на фиг. 41В). Это соединение предоставляет защищенное соединение и предотвращает проникновение головки 324 сверла дальше допустимого для конкретного хирургического применения. Это соединение также гарантирует высококачественный электрический канал посредством соединения регулятора мощности (не показанного) с проводящей муфтой 326 для сверла и, следовательно, головкой 324 сверла. Таким образом, электрические сигналы (предпочтительно EMG) могут быть вызваны головкой сверла во время хирургической процедуры и переданы на одну или несколько аппаратур наблюдения (не показанных). Альтернативный вид сборки изображен на фиг. 41С.
В еще одном варианте осуществления муфта-направитель 354 может вызывать сигналы EMG, как в варианте осуществления, показанном на фиг. 42А-В. В соответствии с этим вариантом осуществления муфта-направитель 354 вмещает один или несколько электродов 332, которые имеют связь 330 с регулятором мощности (не показанным), следовательно, предоставляя интраоперационное наблюдение. В этом варианте осуществления электрод (электроды) 332 помещается внутрь муфты-направителя (муфт) 354 для предоставления электрической связи с проводящей муфтой 336 для сверла или другим проводящим элементом, соприкасающимся с электродом (электродами) муфты-направителя 354. Например, электрод (электроды) может соприкасаться с другими проводящими элементами, такими как инструмент вывода, или фиксирующим устройством, таким как винт. Эти проводящие элементы имеют электрическую связь с регулятором мощности и одной или несколькими аппаратурами наблюдения (не показанными) для предоставления возможности хирургу или другом медицинскому специалисту сравнивать данные EMG, полученные от проводящих элементов, с предопределенными данными EMG, для различных типов ткани. Это позволяет хирургическим устройствам, инструментам и направителям, описанным в данном документе, иметь возможность IOM и предоставлять наблюдение за размещением различных вставок, фиксирующих устройств или других проводящих элементов во время хирургической процедуры.
В соответствии с еще одним вариантом осуществления раскрываются устройства и направители для улучшения крестцовой фиксации. В этом варианте осуществления устройство или направитель изготавливается из данных о пациенте, которые включают одну или несколько траекторий, которые вызывают вход фиксирующего устройства в дисковый промежуток (в противоположность входу в ножку), и в предпочтительном варианте осуществления могут включать траектории для предоставления возможности фиксирующему устройству пересекать один или несколько имплантатов, включая без ограничения устройство для межтелового спондилодеза. В предпочтительном варианте осуществления крестцовая фиксация возникает вследствие предоставления траекторий в одном или нескольких хирургических направителях, при этом траектории располагаются обычно в области концевой пластины и крестцового (S1) мыса. Посредством этих траекторий достигается размещение пары винтовых креплений кости ножки в ножках, распространяющихся в направлении крестцового мыса, предпочтительно совместно с межтеловым имплантатом. В предпочтительном варианте осуществления как направитель (направители) для гарантирования траекторий крестцовых фиксирующих устройств, так и межтеловой имплантат формируются с использованием способов, описанных в данном документе.
В соответствии с этим вариантом осуществления характерный для пациента спинальный имплантат и связанные фиксирующие устройства предоставляют значительное улучшение в конструкции имплантата. В раскрытой конструкции устройство межтелового спондилодеза может быть размещено посредством двухстороннего PLIF или одностороннего TLIF подхода и может также стать механически взаимосвязанным с позвоночным креплением или фиксирующим устройством. Фиксирующее устройство может в качестве примера, а не ограничения быть модифицированным позвоночным транспедикулярным винтом. Хирургический направитель может быть изготовлен с использованием данных о пациенте для предоставления предсказуемой и воспроизводимой траектории и для гарантирования того, что фиксирующие устройства, введенные через направитель, будут взаимосвязаны с устройством межтелового спондилодеза. Несмотря на то, что этот соответствующий пациенту имплантат был описан для использования в пояснично-крестцовом суставе (L5 S1), этот вариант осуществления может также быть использован для всех других уровней шейного отдела, грудного отдела и поясничного отдела позвоночника.
Для поддержания соответствующего пространственного соотношения между распоркой и винтом соответствующий пациенту направитель может также отмечать расположение фиксирующего устройства и распорки и предоставлять соответствующий сужающийся и сагиттальный угол транспедикулярного винта без перфорации срединного наружного покрова и вхождения в спинальный канал. В предпочтительном варианте осуществления характерное для пациента устройство из пластикового или комбинированного материала (т.е. металлического каркаса с соответствующими пациенту пластмассовыми вставками) может предоставить эти необходимые траектории.
Аппаратура, описанная в данном документе, может быть использована в минимально инвазивной ситуации и может также включать ряд взаимосвязанных модулей, которые могут быть собраны после доставки через катетер или другой минимально инвазивный проход к операционному полю. В качестве альтернативы одна или несколько частей аппаратуры могут быть вложены внутрь другой части аппаратуры или в качестве альтернативы вложены внутрь инструмента или другого устройства, которое используется для доставки аппаратуры через катетер или другой минимально инвазивный портал. В соответствии с модальностями производства, описанными выше, аппаратура может быть изготовлена посредством характерных поверхностей соответствия, которые позволяют сборку лишь в надлежащем порядке и могут также включать устройства индикации или другие средства указания того, какие части должны быть вложены внутрь других частей или какие модули должны присоединяться к другим модулям аппаратуры.
Например, в одном варианте осуществления рассматривается предоставление множества вложенных соответствующих пациенту направителей, посредством чего по меньшей мере один, а возможно несколько модулей собираются для создания «основного направителя». Этот основной направитель может охватить несколько спинальных сегментов пациента и может быть закреплен на позвонке одним или несколькими креплениями. Одно или несколько креплений могут включать, но не обязательно ограничиваться фиксирующим устройством транспедикулярного винта, используемого в конечной конструкции. После закрепления основного направителя в правильном местоположении (посредством выравнивания, например, соответствующих пациенту поверхностей с соответствующей им костной анатомией) дополнительные направители могут быть представлены и «вложены» в основной направитель. В одном варианте осуществления эти дополнительные направители могут включать режущие/сверлящие/маршрутизирующие направители. В другом варианте осуществления дополнительные направители могут включать траекторные направители фиксирующего устройства. В еще одном варианте осуществления дополнительные направители могут включать направители восстановления дискового промежутка или направители введения имплантата.
В соответствии с вариантом осуществления, где дополнительные направители включают по меньшей мере один режущий/сверлящий/маршрутизирующий направитель, хирург может затем представить один или несколько последующих вложенных направителей в основной направитель, которые предназначаются для того, чтобы иметь поверхность, соответствующую завершенной разрезанной/просверленной/маршрутизированной костной анатомической поверхности (т.е., которая приспосабливается к областям недавно резецированной кости или предоставляет конечное размещение фиксирующих устройств рядом с областью надрезов). Таким образом, варианты осуществления, описанные в данном документе, могут быть использованы совместно для достижения еще более надежного результата посредством гарантирования надежных разрезов (и надежного исправления нарушения) с использованием первого направителя перед предоставлением второго или последующего направителя (направителей) для введения фиксирующего устройства по надежной траектории.
В соответствии с вариантом осуществления, где хирургический направитель подготавливается для содействия в операции разреза, направитель может включать ряд плоскостей разреза, так что использование режущего инструмента через ряд плоскостей разреза предоставляет измеренный и точный разрез через костную анатомическую структуру. Соответственно один или несколько направителей для разреза, изготовленных посредством способов, описанных в данном документе, приведут к измеренному и точному исправлению анатомического нарушения посредством разреза через ряд плоскостей разреза и, следовательно, удаления костной анатомии, которая была разрезана с использованием одного или нескольких направителей для разреза. В контексте спинальной хирургической процедуры направители для разреза могут быть использованы в различных областях позвоночника или в различных уровнях позвонков пациента для исправления комплексных нарушений.
Аппаратура, раскрытая в данном документе, может быть сделана из ряда различных материалов. Эти материалы могут включать в качестве примера, а не ограничения нержавеющую сталь, титановый сплав, алюминиевый сплав, сплав хрома и другие металлы или металлические сплавы. Эти материалы могут также включать, например, РЕЕК, углеродное волокно, пластик на основе акрилонитрила, бутадиена и стирола, полиуретан, смолы, в частности, каучук из смолистых материалов, заключенных в волокно, латекс, синтетический каучук, синтетические материалы, полимеры и натуральные материалы. В соответствии с одним вариантом осуществления аппаратура может быть сделана из первого материала, который используется для планирования или демонстрации хирургической процедуры, перед тем, как сделать аппаратуру из второго материала для использования во время хирургической процедуры. Таким образом, хирург или другой медицинский специалист может использовать макет направителя и/или нанесенные на план анатомические особенности пациента (произведенные из первого материала) перед выполнением хирургической операции с использованием аппаратуры, подготовленной на основе данных о пациенте и/или операционного процесса планирования, упрощенного макетным направителем и любым другим макетом анатомии пациента. В качестве примера, а не ограничения, это использование первого набора аппаратуры может быть использовано для тренировки методов, которые будут использованы во время хирургической процедуры, или иным образом позволить хирургу выполнить «пробный прогон» процедуры. Возможность тренировки также предоставляет хирургу шанс визуализировать и подтвердить насаждение различных инструментов и фиксирующих устройств с использованием макетных направителей или другой аппаратуры. Кроме того, эти макеты могут предоставить хирургу недорогой способ обучения других медицинских специалистов или пациента перед хирургической процедурой.
Рассмотрим далее фиг. 43, на которой описан способ в соответствии с одним альтернативным вариантом осуществления настоящего раскрытия. В соответствии с этим способом может следовать один или несколько следующих этапов для подготовки соответствующего пациенту устройства, направителя или имплантата. Во-первых, хирург получает информацию, которая указывает на преимущество использования 510 соответствующей пациенту технологии. Во-вторых, пациент сканируется для захвата данных, связанных с анатомическими особенностями, которые подходят для трехмерного рендеринга 512. Далее хирург просматривает данные 514 и готовит начальный операционный план 516. Затем данные изображения, захваченные посредством сканирования пациента, передаются инженерной группе 518 или другим медицинским специалистам для обработки 520. Во время обработки данные о пациенте используются для создания точной анатомической зоны вокруг операционного поля операции. Во время этой обработки данные могут быть преобразованы для создания анатомического файла 522. Следующим этапом является подготовка операционного плана с использованием данных трехмерной анатомической зоны для расположения одной или нескольких интересующих областей 524, которые в свою очередь предоставляют хирургу одну или несколько соответствующих пациенту поверхностей и одну или несколько траекторий. Затем хирург модифицирует и утверждает операционный план 526 и начинается проектирование соответствующих пациенту устройств, направителей и инструментов 528 для завершенного плана. После этапа проектирования происходит производство устройств 530 и после проверки осуществляется поставка в операционное местоположение 532. Оставшиеся этапы стерилизации 534 и использование соответствующих пациенту устройств во время хирургической операции 536 выполняются во время хирургической операции. Следует четко понимать, что менее чем все из вышеизложенных этапов могут следовать без отступления от сущности настоящего раскрытия.
Следует также четко понимать, что, несмотря на то, что быстрое прототипирование и связанные методы производства (такие как CNC) были использованы при иллюстрации настоящего раскрытия, предполагается, что другие модальности производства могут быть использованы без ущерба преимуществам настоящего раскрытия. Например, процессы, не связанные с аддитивным производством, могут быть использованы, а также альтернативные методы получения изображения, для изготовления индивидуального устройства, направителя или инструмента с использованием этапов, описанных в данном документе.
Кроме того, настоящее раскрытие может также быть преимущественным в свете последних улучшений в децентрализованном производстве. Например, устройства, направители и инструменты могут вскоре быть изготовлены в ряде различных и традиционных обстановок, включая без ограничения внепроизводственную площадку, место производственной площадки, использование оборудования, присутствующего в клинике или кабинетах хирурга или в государственной или частной больнице. Таким образом, данные о пациенте и процесс получения точного и соответствующего устройства, направителя или инструмента может быть упрощено приближенностью производственных процессов и рассматривается в рамках объема настоящего раскрытия.
Несмотря на то, что различные варианты настоящего раскрытия были подробно описаны, следует понимать, что модификации и альтернативы этих вариантов осуществления будут понятны специалистам в данной области техники. Однако следует четко понимать, что такие модификации и альтернативы должны подпадать под объем и сущность настоящего раскрытия, как изложено в следующей формуле изобретения. С целью последующей иллюстрации информация и материалы, обеспеченные посредством предварительных и обычных заявок на патент, приоритет на которые испрашивает настоящая заявка, специально составляют часть настоящего раскрытия и полностью включены в данный документ посредством ссылки.
Следует четко понимать, что там, где термин «пациент» был использован для описания различных вариантов осуществления раскрытия, этот термин не должен никоим образом толковаться в качестве ограничения. Например, пациент может являться либо пациентом-человеком, либо пациентом-животным, а аппаратура и способы, описанные в данном документе, в равной степени применяются к ветеринарии, как они бы применялись к хирургическим процедурам, выполненным относительно человеческой анатомии. Аппаратура и способы, описанные в данном документе, следовательно, имеют применение вне хирургических процедур, используемых спинальными хирургами, и идеи могут быть применены к другим типам «пациентов» и процедур без отступления от сущности настоящего раскрытия.
Вышеизложенное обсуждение раскрытия было представлено в целях иллюстрации и описания. Вышеизложенное не предназначено для ограничения раскрытия формы или форм, раскрытых в данном документе. В вышеизложенном разделе «Подробное описание», например, различные особенности раскрытия группируются вместе в один или несколько вариантов осуществления с целью упрощения раскрытия. Этот способ раскрытия не должен толковаться в качестве отражающего намерение, что заявленное раскрытие требует большее количество особенностей, чем четко перечислено в каждом пункте формулы изобретения. Вернее, как свидетельствует следующая формула изобретения, изобретательные аспекты лежат в менее чем во всех особенностях отдельного вышеизложенного раскрытого варианта осуществления. Таким образом, следующая формула изобретения включается в этот раздел «Подробное описание», при этом каждый пункт формулы изобретения является самостоятельным, как отдельный предпочтительный вариант осуществления раскрытия.
Более того, несмотря на то что настоящее раскрытие включает описание одного или нескольких вариантов осуществления и определенных вариаций и модификаций, другие вариации и модификации подпадают под объем раскрытия, например, как будет ясно специалистам в данной области техники после изучения настоящего раскрытия. Это предназначено для получения прав, которые включают альтернативные варианты осуществления, в пределах допущенного, включая альтернативные, взаимозаменяемые и/или эквивалентные структуры, функции, диапазоны или этапы в дополнение к уже заявленным, независимо от того, раскрыты ли такие альтернативные, взаимозаменяемые и/или эквивалентные структуры, функции, диапазоны или этапы в данном документе, и без намерения сделать всеобщим достоянием какой-либо патентоспособный предмет обсуждения.
Реферат
Изобретение относится к медицинскому устройству, подстраиваемому к анатомическим особенностям пациента в хирургической ситуации. Устройство выполнено с возможностью сопряжения с анатомической особенностью конкретного позвонка пациента и содержит срединное тело, выполненное с возможностью расположения смежно с позвонком и имеющее проксимальный конец и дистальный конец, первый направитель, выборочно присоединяемый к срединному телу, при этом первый направитель имеет первую дистальную поверхность, которая анатомически сопрягается с по меньшей мере одним первым контуром упомянутого конкретного позвонка, когда первый направитель присоединен к срединному телу, второй направитель, выборочно присоединяемый к срединному телу, при этом второй направитель имеет вторую дистальную поверхность, которая анатомически сопрягается с по меньшей мере одним вторым контуром упомянутого конкретного позвонка, когда второй направитель присоединен к срединному телу, при этом первая и вторая дистальные поверхности определены из анатомии пациента и являются дополнениями к ней. Использование изобретения позволяет повысить безопасность и эффективность завершения хирургической процедуры. 17 з.п. ф-лы, 43 ил.
Формула
Документы, цитированные в отчёте о поиске
Конфигурирование активной канюли для минимально инвазивной хирургии
Комментарии