Конфигурирование активной канюли для минимально инвазивной хирургии - RU2445934C2
Код документа: RU2445934C2
Чертежи






Описание
Приоритет настоящей заявки заявлен по дате подачи предварительной заявки на патент США № 60/825629, поданной 14 сентября 2006 г.
Настоящее изобретение относится к системам и способам, связанным с конструкциями и конфигурациями активной канюли, которые подгоняются под пациента, чтобы облегчить минимально инвазивные хирургические процедуры.
Известные устройства направляемого движения, такие как катетеры и бронхоскопы, имеют несколько недостатков. Конкретной проблемой при применении бронхоскопов является то, что бронхоскоп обычно имеет относительно большой диаметр трубки, позволяющий изгибать или осуществлять иные направленные движения на наконечнике. Этот большой размер частично обусловлен тем, что в бронхоскоп встроен механизм управления, обеспечивающий его изгиб. Размер и недостаток маневренности известных бронхоскопов ограничивают их способность достигать конкретных областей. Например, традиционным бронхоскопом можно достичь только центральной трети легкого, в которой расположены самые широкие дыхательные пути. Поэтому, например, две трети всех опухолей в легких недостижимы для обычных бронхоскопов и их невозможно подвергнуть обширному физическому воздействию. Даже при биопсии легкого, которая позволяет отличить доброкачественную опухоль от злокачественной, существует возможность приблизительно в 10% вызвать коллапс легкого. Поэтому часто потенциально излечимые заболевания остаются нелечеными до тех пор, пока заболевание не приобретет настолько агрессивную форму, что будет рекомендовано или потребуется хирургическое вмешательство.
Катетеры и проволочные направители, связанные с традиционными хирургическими методами, обладают относительной гибкостью и могут проникать глубоко в тело, продвигаясь по сосудам. Однако форма наконечника этих устройств рассчитана на самый сложный из возможных анатомических изгибов. Способность устройства маневрировать в сложном изгибе только одного вида ограничивает область применения такого устройства. Катетеры и проволочные направители часто используются в "восходящем" направлении, при котором разветвление сосуда не требует особого контроля и поэтому один сложный изгиб сберегается для конкретного местоположения. Например, введение катетера в дистальную артерию, такую как бедренная артерия (используемая при баллонной ангиопластике), по направлению к сердцу означает, что сосуды в этом направлении объединяются, а не разветвляются. Хотя этот способ эффективен во многих случаях, не существует эффективного механизма прохождения по сложным артериям, по которым кровь движется в направлении от сердца, или по венам, ведущим от сердца, против потока крови. В легком катетеры и проволочные направители относительно мало контролируются на своем дистальном конце, чтобы достичь конкретных ветвей легочной артерии, и поэтому они не пригодны для достижения конкретных целей.
При введении медицинского устройства, такого как канюля, катетер, проволочный направитель или оптический прибор (такой как бронхоскоп, эндоскоп и т.п.), обычно возникает трение, которое может вызвать повреждения ткани на всем пути прохождения к цели. Это может произойти при введении устройства в заданную анатомическую область, особенно если применение метода проб и ошибок при прохождении через сложную анатомию вызывают пилящее движение. Кроме того, движение наконечника инструмента во время хирургических или исследовательских процедур придает движение всей ткани на всем пути. Например, во время биопсии, абляции, прижигания, электрофизиологии и т.п. перемещение наконечника устройства вызывает движение на всем пути устройства. Это трение может вызвать отрыв уязвимых бляшек, в результате чего может, например, возникнуть инсульт.
Известные методы перемещения активной канюли построены, в основном, на взаимосвязи формы и прочности множества вставленных одна в другую трубок для создания определенного характера движения на дистальном наконечнике. Для использования активной канюли путем последовательного развертывания вставленных одна в другую трубок необходимо задать конфигурацию этих трубок таким образом, чтобы можно было обеспечить данный путь. При этом недостаточно найти среднюю линию прохождения через сосуды, потому что эта информация не описывает, как следует разложить эту траекторию на обычные выдвигаемые элементы. Например, форму S невозможно развернуть просто в виде единой непрерывной S-образной формы. Это обусловлено тем, что при выходе одного конца из трубки он будет обращен в неправильном направлении. Необходимо вставить друг в друга две С-образные формы, чтобы повернуть первую форму против часовой стрелки, а вторую, ориентированную на 180 градусов относительно первой, выдвинуть для образования формы С по часовой стрелке. При этом также требуется индивидуальное формование, например, с использованием нагрева, чтобы формы немного различались. Кроме того, диаметр трубок должен соответствовать предполагаемой анатомии.
Известен способ, описывающий, как определить траекторию направления бронхоскопа, чтобы достичь заданной цели в трехмерном пространстве и при этом обойти препятствия. Этот способ можно также применить к сгибаемым катетерам, имеющим заранее определенную предпочтительную дугу. Однако до сих пор не существует решения, позволяющего планировать траекторию активной канюли до заданной цели в двух или трех измерениях.
Системы активной канюли могут обеспечить ряд преимуществ по сравнению с известными методами доступа и направляемых движений, которые включают в себя, без ограничения перечисленным, гибкость трубок, входящих в систему активной канюли, меньший диаметр по сравнению с другими системами навигации, а также конструкцию с последовательным выдвижением вложенных одна в другую трубок. Количество трубок в конкретной последовательности и/или системе активной канюли ограничено диаметром наружной трубки, а также тем, будут ли последующие трубки соответствовать анатомии при их выдвижении. Поэтому, при использовании существующих систем может быть затруднительно достигать некоторых сильно извитых, узких путей.
Соответственно, существует потребность в эффективной системе конфигурирования активной канюли. Эту и другие потребности позволяют решить предложенные системы и способы.
В соответствии с настоящим изобретением предложены усовершенствованные системы и способы для конфигурирования активных канюль для минимально инвазивных медицинских процедур. Подогнанный прибор, именуемый Активной Канюлей (AC), создается для конкретного пациента на основании полученного ранее трехмерного изображения и идентификации целевого местоположения. Примерная система в соответствии с настоящим изобретением содержит множество концентрических телескопических трубок, вложенных одна в другую. Вложенные трубки имеют конфигурацию и размеры, позволяющие достигать целевого местоположения путем формирования трубного пути через набор дуг, построенных на основании трехмерного изображения конкретной анатомической области. Необходимое изображение, как правило, получают с помощью системы трехмерной визуализации, в которой каждую дугу строят между точкой входа в анатомической области и целевым местоположением. Трубкам приданы конфигурация и размеры, позволяющие достигать относительно маленьких и/или сложных целевых местоположений внутри конкретной анатомической области. Эти трубки могут предпочтительно быть выполнены из материала, обладающего необходимыми уровнями гибкости/эластичности. Таким образом, одна или более трубок может быть изготовлена из нитинола. Нитинол обладает отличной "памятью", т.е. его можно изогнуть путем приложения силы и он возвратится в свою исходную форму после снятия усилия. Нитинол также пригоден для использования с аппаратами МРТ. Это относительно прочный материал, следовательно, из него можно изготавливать тонкостенные трубки, позволяющие вкладывать несколько трубок одна в другую. Трубки с наружным диаметром от около 5 мм до около 0,2 мм имеются в наличии на рынке.
В примерном варианте настоящего изобретения в качестве системы трехмерной визуализации может использоваться система CT, ультразвуковая система, PET, SPECT или MRI, но также может быть сконструирована на основе датчиков расстояния, стереоизображений, видеоизображений или других немедицинских систем формирования изображения. Обычно для определения конфигурации и размера каждой из множества трубок используется изображение конкретной анатомической области, чтобы задать конкретную форму и длину выдвижения для каждой из множества трубок. С помощью заданной формы и длины выдвижения каждой из множества трубок определяется, достижимо ли целевое местоположение. В примерном аспекте настоящего изобретения множеству трубок придаются конфигурация и размеры, соответствующие заранее установленным формам и длинам выдвижения для конкретной анатомической области. Это заранее установленное множество трубок может включать в себя чередование изогнутых и прямых трубок.
В примерной системе в соответствии с настоящим изобретением множеству трубок придаются конфигурация и размеры, соответствующие заранее установленным формам и длинам выдвижения для конкретной анатомической области, связанной с конкретным субъектом. Конфигурация и размеры придаются трубкам так, чтобы можно было достичь местоположений с относительно малым диаметром и/или местоположений, требующих сложных маневров в данной анатомической области. Анатомическая область может быть любой желаемой областью, в которой требуется инструментальное вмешательство или процедура, включая, без ограничения перечисленным, грудную клетку, брюшную полость, неврологические области, сердце, сосуды и т.д.
В одном примерном аспекте настоящего изобретения трубки выполнены так, чтобы исключить повреждение тканей в результате трения при их введении, путем создания и/или обеспечения барьера с наружной трубкой из множества трубок для трубок, вставленных внутрь. Эти трубки могут дополнительно содержать элемент медицинского устройства или другую активную конструкцию на наконечнике выдвигающейся дальше всех трубки, выполненной с возможностью выполнения и/или облегчения медицинской процедуры в целевом местоположении. Медицинские устройства, связанные с настоящим изобретением, включают в себя, без ограничения перечисленным, катетеры, телескопические наконечники, проволочные направители, волоконно-оптические устройства, приборы для биопсии, наложения швов и терапии, а также датчики (рН, температуры, электрические). Электрические датчики обычно используются, например, для исследования сердечной электрической функции. Трубки можно адаптировать так, чтобы позволить направлять и регулировать их вручную при введении в анатомическую область, используя тактильную или визуальную обратную связь. Можно использовать позиционную обратную связь, например, с помощью электромагнитных катушек слежения, встроенных в трубки или в полезную нагрузку, которую несут трубки. Это положение может отображаться на графическом дисплее, предпочтительно, как запись на изображении.
Также предложен способ конфигурирования активной канюли, заключающийся в том, что: (а) считывают трехмерное изображение конкретной анатомической области; (b) формируют последовательность дуг из конкретного положения и ориентации в трехмерном изображении; (с) вычисляют путь между входом и целевым местоположением, используя сформированную последовательность дуг, проходящих через точку; (d) формируют множество концентричных телескопических трубок, вложенных друг в друга, имеющих конфигурацию и размеры, позволяющие достичь целевого местоположения с помощью сформированных.
Дополнительные признаки, функции и преимущества раскрываемых систем и способов поясняются в приведенном ниже описании, в частности, в совокупности с прилагаемыми фигурами.
Чтобы помочь специалистам в создании и использовании раскрытых систем и способов, на прилагаемых фигурах представлено следующее:
Фиг. 1A - три различных примерных изгиба канюли, с радиусом 28 мм, радиусом поворота 14 мм и прямая (с бесконечным радиусом);
Фиг.2 - пример трехмерного соседства дуг, представляющий варианты движения для центра каждой трубки, в соответствии с настоящим изобретением;
Фиг.3 - пример двухмерного соседства дуг, иллюстрирующий соседние дуги в прямом направлении;
Фиг.4 - пример двухмерного соседства дуг по Фиг.3, иллюстрирующий соседние дуги вдоль фиксированного изгиба влево;
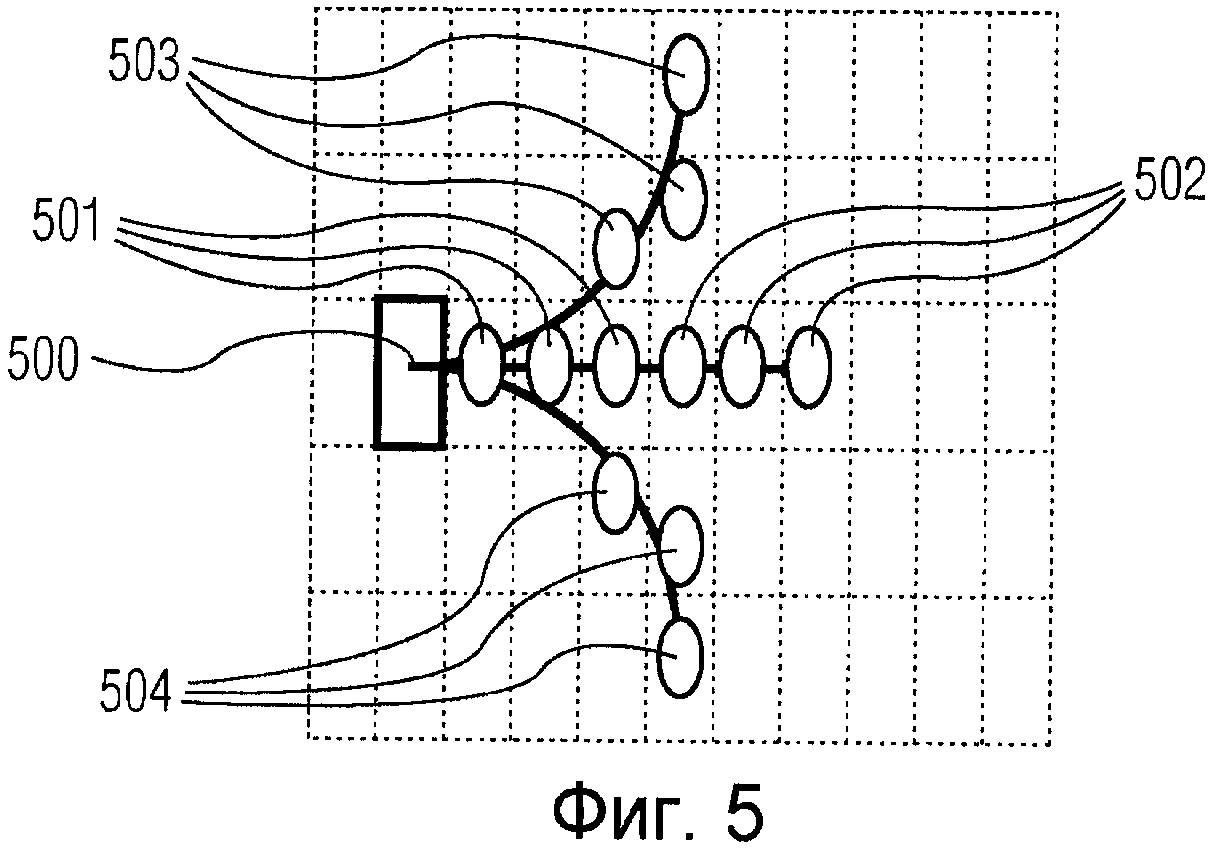
Фиг.5 - пример двухмерного соседства дуг по Фиг.3, показывающий оптимальных соседей от каждой нити исходного набора;
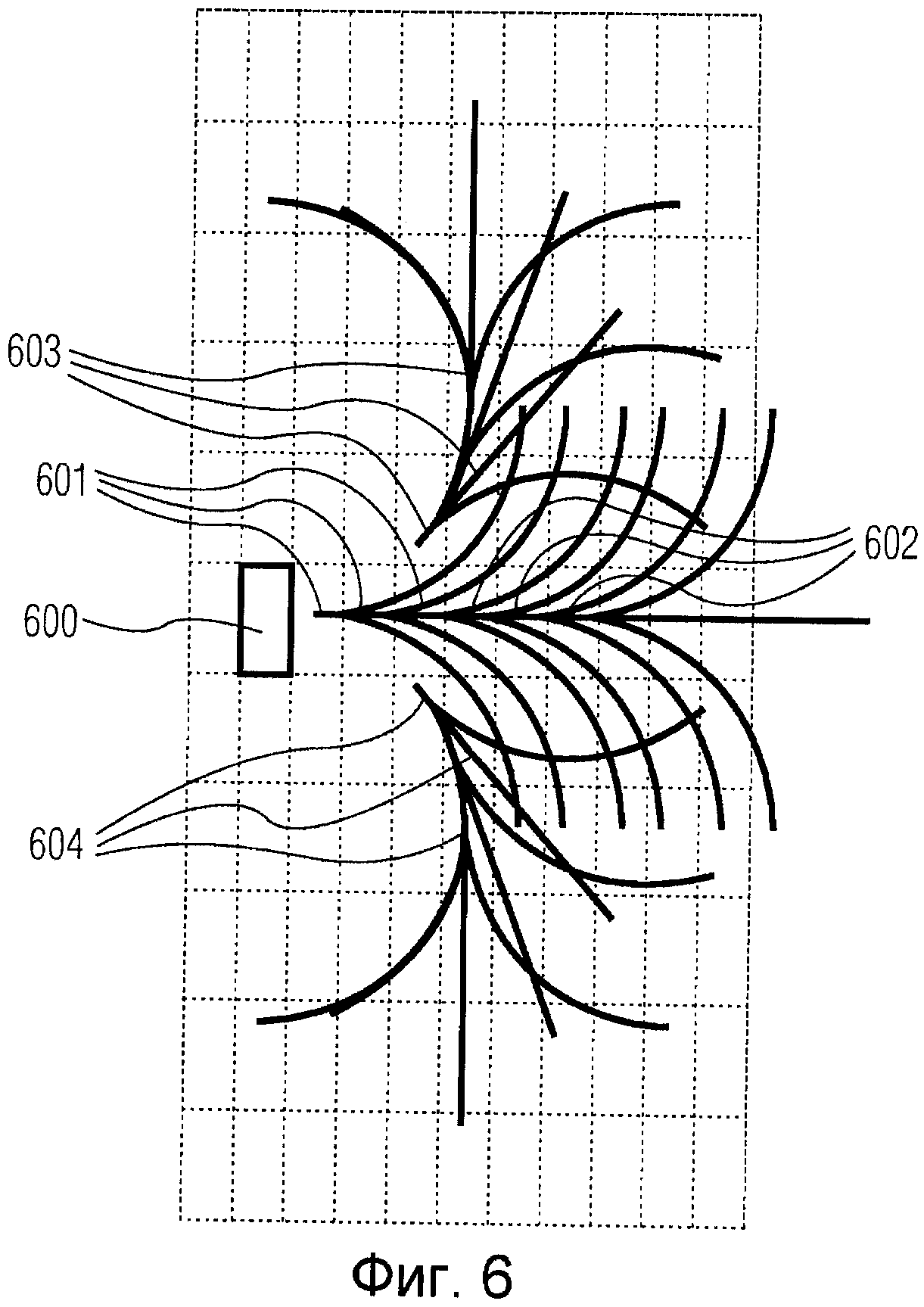
Фиг.6 - охват, полученный в результате развертывания первого набора открытых соседних дуг и образующих цепь дуг;
Фиг.7 - сегментация легочных дыхательных путей и примерная конфигурация трубок в соответствии с настоящим изобретением;
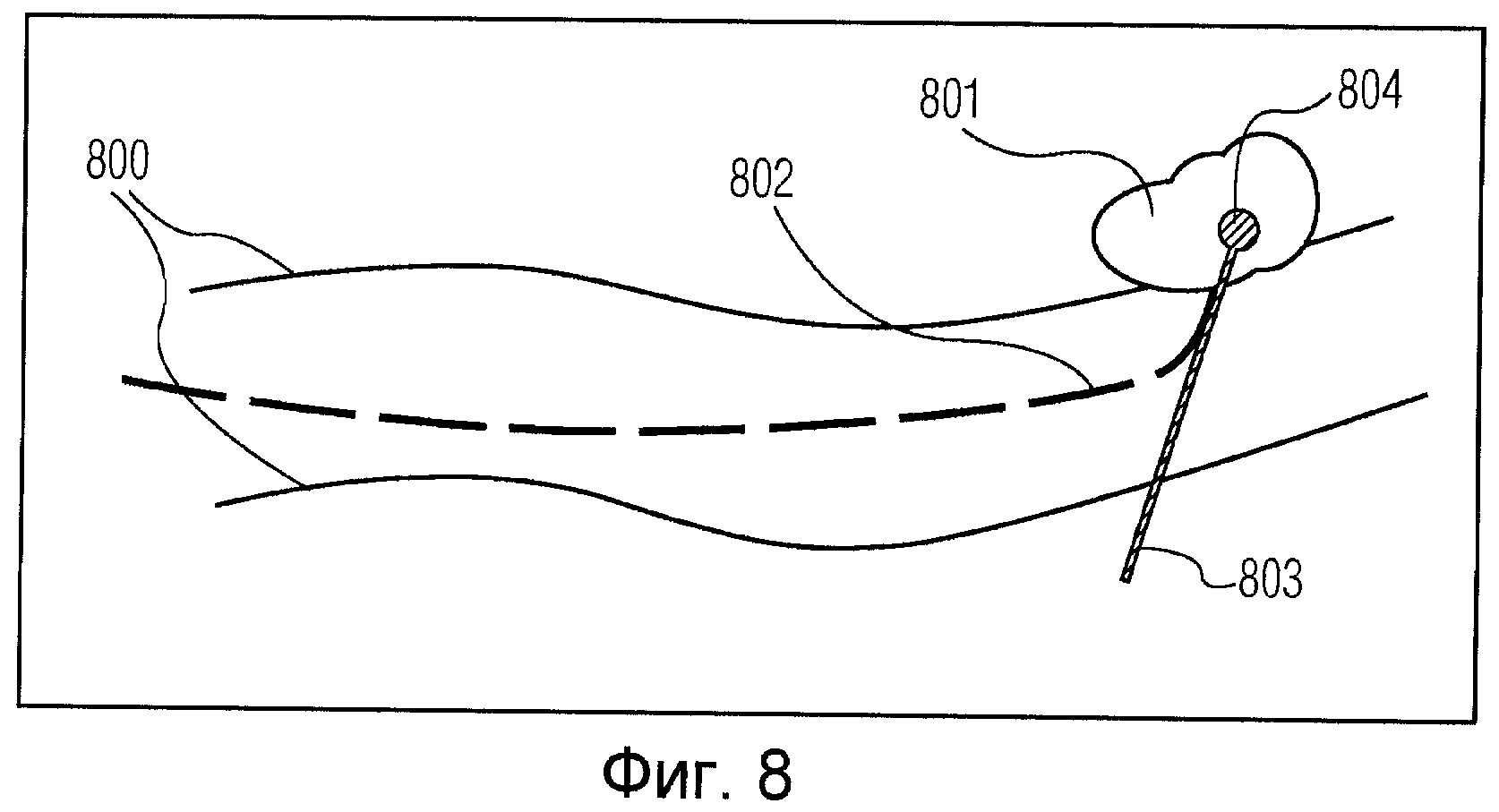
Фиг.8 - примерный угол подхода к опухоли, предназначенной для биопсии;
Фиг.9 - примерный тангенциальный угол подхода к опухоли, предназначенной для бронхоальвеолярного лаважа (BAL).
Настоящее раскрытие обеспечивает систему и способ конфигурирования активной канюли, позволяющие формировать активную канюлю, подогнанную под пациента и/или представляющую интерес анатомическую область, допускающую минимально инвазивные хирургические процедуры с достижением конкретных целевых местоположений, к которым обычно затруднен подход с помощью традиционных хирургических средств. Нитиноловые трубки обеспечивают гибкость и маневренность для достижения сложных целевых местоположений. Используются одно или более трехмерных изображений для формирования последовательности траекторий в трехмерном пространстве, которые определяют форму и длину выдвижения гибких трубок. В одном примерном аспекте настоящего изобретения трубные пути вычисляются за несколько минут. Сконфигурированные системы AC и способы позволяют проходить сложную сосудистую сеть быстрее, чем с помощью формируемых вручную катетеров, для правильного формирования которых обычно применяется метод проб и ошибок.
Движения, необходимые для достижения цели, конструктивно предусмотрены в приборе, поэтому он может выполнять множество поворотов без двигателей, регулирующих направителей и т.п., создающих дополнительный вес или размер. Этот миниатюрный и маневренный прибор может обеспечить точный минимально инвазивный подход к очень маленьким анатомическим областям и/или участкам.
В соответствии с настоящим изобретением система активной канюли может содержать множество телескопических, предварительно сформированных трубок. Концентрические телескопические трубки, выполненные из гибкого нитинола (никель-титанового сплава) или другого пригодного материала, обычно выдвигаются вдоль анатомической области, причем каждая трубка имеет конкретный изгиб. Нитинол является наиболее предпочтительным материалом для изготовления канюли благодаря его свойствам памяти и гибкости, которые позволяют трубке конформно размещаться в трубке большего размера до тех пор, пока трубка не будет выдвинута. Обычно сначала в требуемую область вводится самая большая трубка, а затем последовательно вводятся/выдвигаются меньшие трубки до достижения необходимой длины и ориентации. В одном примерном аспекте настоящего изобретения трубки могут быть выполнены из пластика или резины, которые более экономичны, однако могут потребовать более толстых стенок. Этот вариант может быть предпочтительным, если требуется достаточное малое количество трубок для достижения целевого положения, или если анатомическая область достаточно большая, чтобы в ней разместилась каждая трубка. Также важны характеристики эластичности трубок, поэтому может быть целесообразным вставлять их друг в друга непосредственно перед выдвижением, чтобы у них было меньше возможности принять новую форму.
Примерная активная канюля (AC) обычно может содержать множество телескопических нитиноловых трубок (также называемых набор трубок), позволяющих достичь относительно малых и/или сложных участков в требуемой анатомической области.
Согласно выгодному аспекту настоящего изобретения система AC может содержать "стандартный набор" трубок с чередованием изогнутых и прямых трубок. Использование стандартного набора позволяет достигать различных местоположений в данной анатомической области без затрат или задержки на подгонку каждой трубки.
В соответствии с аспектом настоящего изобретения предложен примерный способ конфигурирования системы AC. Конкретное трехмерное изображение целевой анатомической области может быть сформировано с помощью системы визуализации, такой как CT, ультразвуковая система, PET, SPECT, MRI или других средств формирования изображения. В одном аспекте изобретения изображения можно точно прилаживать другу к другу, создавая многомодельное изображение, например PET-CT, где PET дает критическую информацию о целевых опухолях, и изображение CT можно сегментировать, чтобы определить запретные, "критические области", в которые активная канюля не может проходить. Сначала определяется точка, типично цель. Потенциально, точкой также может быть вход или центральная ключевая точка. Начиная от точки, вычисляются достижимые местоположения и определяется правильный набор форм телескопических трубок, необходимый для достижения целевых местоположений в трехмерном пространстве. На основании этих определений выбираются и/или формируются отдельные трубки.
Далее будут описаны и конкретизированы основные составляющие общей схемы для применения активной канюли, а именно: дискретизированное конфигурационное пространство, запрещенные состояния, стартовое или целевое состояние(я), соседство и метрика цены.
1. Конфигурационное пространство
Конфигурационное пространство определяется диапазоном возможных параметров, которые описывают состояние, иногда именуемое как "конфигурация" устройства. Например, конфигурацию робота можно определить значением каждого углового сочленения. Диапазон всех возможных конфигураций углового сочленения образует конфигурационное пространство. Аналогичным образом, конфигурацию транспортного средства можно определить положением и ориентацией его x, y. В каждом состоянии, часто с вводом массива, определенного значениями параметров для одной конфигурации устройства, сохраняется несколько значений, включая направление для перехода из этого состояния в следующее и оставшуюся цену достижения цели из этого состояния. Эти значения назначаются методом поиска, который выполняется позже.
Конфигурация активной канюли (AC) может быть представлена как местоположение x, y, z и ориентация rx, ry, rz наконечника AC, что дает в результате шестимерное проблемное пространство. Релевантные местоположения могут оказываться в примерном предпроцедурном изображении CT 512×512×295 с примерным разрешением x, y, z 0,078, 0,78 и 0,3 соответственно. Дискретизация всех ориентаций с приращениями 10 градусов для изображения CT потребует 3,6 триллионов состояний, каждое из которых содержит около 40 байт, что составит 144 терабайт нагрузки на память. После пояснения остальных четырех компонентов будет описан метод, позволяющий использовать конфигурационное пространство с размером, приблизительно равным размеру трехмерного CT изображения.
2. Запрещенные состояния
Анатомия сегментируется так, чтобы некоторые области вокселей считались состояниями "свободного пространства", а другие - запрещенными областями, через которые устройство не должно проходить. Этот этап сегментации можно реализовать различными методами, включая сегментацию посредством ручного черчения по модели, когда пользователь размещает номинальную модель в анатомической области, и компьютер уточняет сегментацию, или полностью автоматическую сегментацию. В данном примере конфигурирование активной канюли для легких требует сегментации легочных дыхательных путей. Примерное изображение на Фиг.7 сегментировано с помощью полуавтоматического метода Fast March (А*) с порогом. Этот метод формирует внутренний объем свободного пространства и внешний, запрещенный объем (легочную ткань).
3. Стартовое или целевое состояние(я)
Местоположение y, x, z опухоли или другой цели можно выбрать в качестве точки затравки для поиска (описываемой ниже). Альтернативно, в качестве точки затравки для поиска можно использовать такое положение ввода, как положение внутри трахеи. Необходимо также определить ориентацию (rx, ry, rz) для положения(й) точки затравки.
В предпочтительном аспекте изобретения цель выбирается на основании того, где относительное свободное пространство меньше (более ограничено). Из этого положения определяется клинически приемлемый угол входа. Например, на Фиг.8 дыхательный путь 800 содержит узелковое утолщение или подозрительную массу 801 в легком, предназначенную для биопсии. Необходимо найти траекторию 802, проникающую в центральную область легочного узелка или подозрительной массы 801 с достижением целевого места 804, при котором угол введения, также именуемый как угол 803 подхода к цели, должен быть практически перпендикулярен, чтобы усилие иглы в участке прокола было направлено вовнутрь. В этом случае предпочтительный угол может представлять собой компромисс между идеальным перпендикуляром к поверхности и удовлетворением ограничений размером сосуда путем расположения под углом в направлении дыхательных путей большего размера (влево), под которым подойдет активная канюля.
В других ситуациях, как на Фиг.9, в дыхательном пути 900 угол 903 подхода может быть более тангенциальным, возможно даже не касаться поверхности легочного узелка или подозрительной массы 901 до целевого места 904. Это может быть клинически целесообразно, например, при выполнении бронхоальвеолярного лаважа (BAL) в легком. Целевое место 904 достигается по предложенной траектории 902. BAL представляет собой процесс инфузии и отсасывания стерильного физиологического раствора (обычно 0,9%) в дистальных сегментах легкого через оптоволоконный бронхоскоп. Раствор заполняет дыхательные пространства, которые являются дистальными относительно наконечника бронхоскопа. Отсасываемый раствор можно использовать для того, чтобы дифференцировать злокачественную опухоль от доброкачественных узелков, идентифицированных на CT, путем анализа полученных при отсасывании клеток. Однако чувствительность этой процедуры изменчива, поэтому действительное заболевание может быть не обнаружено. Возможной причиной такой изменчивой чувствительности является то, что наконечник бронхоскопа должен пройти достаточно далеко в легкое, поэтому используется большее количество жидкости, чем необходимо для заполнения дистальной области, и тем самым уменьшается шанс обнаружения действительно пораженных клеток. Использование активной канюли и меньшей доли воды позволяет легче обнаружить подозрительные клетки, потому что они будут присутствовать в более высокой относительной концентрации. После проведения процедуры BAL с помощью бронхоскопа остается жидкость, которая либо должна абсорбироваться легкими, либо удаляться путем отхаркивания. При процедуре BAL с помощью активной канюли предполагается использование меньшего количества жидкости с меньшими побочными эффектами после процедуры. И наконец, если AC достигает более точно целевого местоположения, то результаты могут не только показать наличие заболевания, но и подтвердить его местоположение.
4. Соседство
Соседство инкапсулирует набор основных движений устройства, которые могут выполняться в свободном пространстве на основе имеющихся регулировок и механических свойств устройства. Изгиб конкретной трубки имеет заданный "минимальный радиус поворота", подобно автомобилю. В примере, показанном на Фиг.1, для активной канюли предусмотрены три различных изгиба. Первый изгиб 101 является прямым (отсутствие изгиба или, эквивалентно, бесконечный радиус поворота), второй изгиб 102 имеет радиус поворота 28 мм и третий изгиб имеет радиус поворота 14 мм. Ряд точек, изображенных, например, вдоль изгиба 102, демонстрирует положение в пространстве Х,Y для конкретного выдвижения изогнутой трубки 28 мм. Тангенс этого положения показывает ориентацию. Для AC основные регулировки - это угол поворота и продвижение вперед каждой трубки, где изгиб каждой трубки выбирается предварительно из группы отдельных изгибов, таких как три, показанные на Фиг.1.
Путем поворота каждой из трех дуг, показанных на Фиг.1, с приращениями на 45 градусов получено соседство, показанное на Фиг.2. Каждая изогнутая трубка с определенным углом поворота также называется нитью. На Фиг.2 имеется восемь углов поворота для двух изгибов (с радиусом поворота 14 и 28 мм) плюс дополнительный вариант (прямой без угла поворота). Для каждого изгиба показан один пример, нить 201 с радиусом поворота 14 мм и нить 202 с радиусом поворота 28 мм с одинаковым углом поворота. Каждую нить можно выдвинуть на любую длину, следуя одному и тому же изгибу. Длина дуги для неголономной проблемы с произвольно дискретизированным пространством работает хорошо, если изогнутая нить выдвигается до тех пор, пока ориентация не изменится на 90 градусов, как показано, например, на Фиг. 1-6. Прямая часть соседства 200 не учитывает поворотный компонент и предполагает, что вводимый угол поворота остается одинаковым, так как прямая трубка при произвольном угле поворота следует одной и той же траектории. Следует отметить, что хотя на Фиг.1 и 2 показаны прямоугольные пиксели, это всего лишь результат выбора осевых указателей.
Соседство для активной канюли - это механизм, который инкапсулирует неголономное поведение устройства. Понятие "неголономное" означает, что конкретные значения параметров управления (продвижение плюс угол поворота) не дают уникального определения результирующего положения и ориентации, если не известны характеристики уже пройденной траектории. Соседство является ключевым компонентом поиска (описанного далее), потому что оно охватывает набор разрешенных движений из некоторого положения.
5. Метрика цены
Каждому положению соседства назначается цена. Она является составляющей ценой для локального движения на основании общего критерия оптимизации. В примере активной канюли желательно минимизировать проходимое расстояние. Поэтому цену определяет расстояние, проходимое вдоль дугообразной или прямой траектории от исходного положения до соседа.
Теперь обратимся к преобразованию шестимерного конфигурационного пространства в трехмерное для удобства манипулирования, так как дискретизированное конфигурационное пространство, описанное выше и требующее 144 терабайт памяти, не только создает проблему с памятью на большинстве компьютеров, но и требует поиска по этим положениям согласно следующему разделу. Работа с такой структурой требует модифицированного метода, который бы уменьшил конфигурационное пространство и время вычислений.
Такая модификация основана на двух наблюдениях. Во-первых, запрещенная область полученная из трехмерной CT, остается той же самой, несмотря на ориентацию наконечника. Поэтому полезно идентифицировать условия, при которых трехмерную ориентацию можно либо проигнорировать, либо свести к нескольким значениям, сохраняемым для каждого положения в трехмерном пространстве.
Второе наблюдение вытекает из пересмотра основной цели конфигурационного пространства, т.е. хранения значений, описывающих текущее состояние, и выдачи направлений к следующему состоянию. Если ориентацию можно зафиксировать либо на стартовом, либо на целевом местоположении затравки, то это даст основание для вычисления уникальных соседних ориентаций. Из положения и ориентации затравки можно вычислить положения с конкретными ориентациями для всех достижимых точек.
Затем можно сохранить запланированные ориентации rx, ry, rz как значения в каждом конфигурационном состоянии x, y, z вместе с ценой и ориентацией. Исключение их как независимых параметров конфигурационного пространства уменьшит пространство от шестимерного до трехмерного, существенно уменьшив область памяти, необходимую для приблизительно 77 миллионов состояний, более конкретно до легко обрабатываемых 3 гигабайт памяти.
Ошибку позиционной (Х, Y, Z) дискретизации можно также уменьшить путем сохранения запланированных значений в каждом состоянии. Присущее значение (положение по умолчанию) данного дискретного состояния - это значение, представленное на центре вокселя. В зависимости от уровня дискретизации вокселя это значение может быть достаточным для управления предложенным устройством. Его можно существенно улучшить путем факультативного сохранения точных позиционных значений (Х, Y, Z) в данном состоянии, вместо того, чтобы получить ошибку дискретизации по всему конфигурационному пространству. Такое решение обеспечивает два преимущества.
Во-первых, положение можно сохранить с точностью, произвольно выбранной для данного положения. Это может быть особенно полезно, когда размеры вокселей не равны, что обеспечивает высокую точность в некоторых направлениях (например, Х и Y) и меньшую точность в других направлениях (например, Z). Например, на медицинском изображении, таком как CT, воксели могут быть не квадратными или, точнее, не кубическими или анизотропными, где длина вокселя по осям Х и Y может быть 0,78 мм, а длина вокселя по оси Z - 0,3 мм. Хотя охват препятствия определяется с разрешением в вокселях, можно более точно определить регулировку путем сохранения вычисленных, возможно с двойной точностью, значений x, y, z, rx, ry, rz в пространстве каждого состояния.
Во-вторых, если текущее состояние не направляется адекватно до следующего состояния, то это можно идентифицировать и автоматически запустить альтернативные стратегии управления. В простейшем случае устройство можно остановить и подождать правильных безопасных условий для возобновления движения. Например, во время дыхания пациента x, y, z действительное положение устройства будет перемещаться. Можно принять решение, что управление устройством можно продолжать только при действительном положении в пределах 0,5 мм запланированного сценария.
После определения основных компонентов можно построить кратчайшую, свободную от коллизий траекторию от фиксированной начальной затравки (стартовой или целевой) на основе имеющихся изгибов или форм трубок и движений, разрешенных для этой трубки (таких как поворот и выдвижение), которые инкапсулированы в соседство. Эта траектория включает в себя движения по сопряженным дугам или по прямой между стартом и целью и реализуется поэтапно с помощью соответствующих управлений.
Что касается формирования траектории, то предпочтительно использовать метод поиска А* для нахождения всех возможных траекторий из местоположения(й) затравки. Такой трехмерный поиск описан, например, в известных применениях, включая маневрирование автомобилем и маневрирование бронхоскопом. Такой же трехмерный поиск выполняется и для активной канюли, однако он будет проиллюстрирован в двух измерениях в силу ограничений бумажного носителя.
На Фиг.3 показан двухмерный пример соседства. Это упрощенное соседство показывает "исходное положение" 300 и прямую нить, включающую в себя соседей 301-306. Имеется две нити, имеющих одинаковый изгиб с заданным углом поворота на 180 градусов относительно друг друга, чтобы они лежали в одной плоскости бумаги. На Фиг.4 исходное положение 400 соответствует исходному положению 300 на Фиг.3, и соседи вдоль левой нити идентифицированы как 401-406. Эквивалентный набор можно идентифицировать вдоль правой нити.
Соседство определяет положения, которые считаются достижимыми соседями, а не только те, которые находятся рядом. Эти положения последовательно расширяются по принципу "первый, который имеет наименьшую цену" с прибавлением цены перехода к общей цене на данный момент и сохранением только минимальных. Пересмотренная ориентация наконечника вычисляется на основании предыдущей ориентации, и осуществляется изменение путем прохода к выбранному соседу. На Фиг.5 показаны соседи, которые были достигнуты в конечном итоге с минимальной метрикой расстояния. Эти соседи находятся в некубическом конфигурационном пространстве, что дополнительно показывает, как идентифицируется минимальная цена для положения. В этом случае соседи 501 и 502 достигаются по прямой траектории. Соседи, достигнутые вдоль левой нити, если нет более оптимальной (например, прямой) траектории к этим положениям, показаны как 503. Можно также идентифицировать подобных соседей 504 вдоль правой нити. Эти соседи становятся открытыми узлами для следующих циклов развертывания.
На Фиг.6 показан первоначальный исходный узел 600 вместе с иллюстрацией структуры соседей, которая будет расширяться до местоположений и ориентаций, описанных в связи с Фиг.5. В каждом "открытом местоположении" считывается ориентация исходного узла 600, и последующее расширение ориентируют относительно этой ориентации. Положения и ориентации набора открытых соседней 503 на Фиг.5 расширяются до местоположений 603 с новым соседством, ориентированными так, чтобы совпасть с ориентацией исходного узла. Аналогичным образом, открытые узлы 501 и 502 на Фиг.5 расширяются до местоположений 601 и 602 на Фиг.6, а открытые узлы 504 на Фиг.5 до местоположений 604.
Этот упрощенный пример поиска предполагает отсутствие запрещенных положений. Расширение соседства предпочтительно выполняется из исходного местоположения соседства вдоль каждой нити от ближайшего к самому дальнему. Если обнаружено запрещенное положение, то остальная часть нити признается недостижимой и поиск продолжается с соседней нитью. Таким образом исключается "перепрыгивание" нити через недопустимую область.
Такой же метод поиска, включающий в себя последовательный поиск среди нитей, чтобы избежать препятствий, выполняется в трех измерениях. Для этого требуется только, чтобы соседство, показанное на Фиг.2, было переориентировано в данное положение и ориентацию открытого узла для вычисления набора последовательно достижимых положений. Процесс заканчивается, когда последовательные вычисления либо заполняют пространство (больше нет открытый положений), либо поиск достигает другого приемлемого состояния завершения. Набор приемлемых состояний завершения может быть, например, любым узлом в плоскости самой верхней трахеи, например, когда поиск начинается с цели, такой как целевое положение 804 на Фиг.8.
Существует интуитивная аналогия для такого развертывания по методу А* "первый с наименьшей ценой". Представим волну, создаваемую камешком, брошенным в пруд в местоположении затравки. Когда возникают волны, обходящие вокруг островов (запрещенных областей), каждую секунду делается моментальный снимок, имеющий метку времени (t0, …tn). Перпендикуляр, проведенный к волнам на снимках, образует "указатель", который дает направления из каждого достижимого положения к затравке-источнику. Из любого достижимого местоположения нужно только следовать указателям от одного местоположения к другому, чтобы достичь местоположения затравки, в которое был брошен камешек. Кроме того, метка времени на изображении, содержащем текущее местоположение, показывает расчетное время, необходимое для возвращения обратно к затравке. Если волны не достигают какого-то местоположения, то между этим местоположением и местоположением затравки траектория отсутствует. Идентификация ситуаций, в которых отсутствует возможная траектория (с помощью специального устройства) является полезным свойством, так как оно экономит время и энергию на бесполезные действия. Если траектория отсутствует, можно смоделировать другие средства нахождения эффективной траектории. Другой метод заключается в идентификации, можно ли переместить одно или более препятствий. Хотя эта аналогия описана в двух измерениях, метод А* хорошо работает также и в трех и более измерениях. В некоторых эффективных методах А*, не описанных здесь, поиск фокусируется так, чтобы вычислялись только наиболее вероятные положения, необходимые для решения.
Что касается следующей траектории, когда достигнут завершающий узел, то вычисляется траектория между ним и затравкой. Альтернативно, пользователь или компьютер может выбрать конечную точку для соединения с ближайшей затравкой. Траектория строится от одного положения к другому между стартом и целью. Переход от одного положения к другому требует считывания "вектора направления", который может храниться как номер соседа. Как показано на Фиг. 3 и 4, номер соседа может также указывать нить, следовательно, тип принятой траектории. Например, номер соседа 405 на Фиг.4 показывает, что дуга с конкретным изгибом направлена влево на конкретное расстояние, что дает определенное местоположение и ориентацию. Это соответствует углу поворота во вмещающей трубке и длине введения, необходимой для данной изогнутой трубки, чтобы достичь следующего положения по данной траектории.
На Фиг.7 показана примерная траектория между входом 706 и целью 707. Для правильного вычисления количества трубок, если нить ведет к нити такого же типа (имеющей такую же относительную ориентацию и изгиб) вдоль этой траектории, необходимо рассматривать одну непрерывную трубку. Иными словами, дуги, имеющие одинаковый изгиб и относительный угол поворота, можно соединить, чтобы получить более длинную трубку с такими же параметрами, например, две дуги с радиусом 28 мм с углом поворота +45 градусов. Каждое изменение типа нити в последовательности представляет изменение следующей трубки во вложенной последовательности трубок в системе AC. Траектория показана на Фиг.7 схематически, чтобы упростить визуальное представление результатов. Следует отметить, что эта трубка должна пройти через нос или рот, чтобы достичь трахеи, и нужно учесть траекторию от точки ввода 706, которая имеет определенную ориентацию.
Первая трубка прямая и должна пройти длину 705. Из этой точки вторая трубка 704 продвигается до тех пор, пока не достигнет 704, где она соединяется с трубкой 703. Вторая трубка 704 имеет меньший внешний диаметр, чем внутренний диаметр 705, и изгиб, заданный соседом и выбранной нитью. Аналогичным образом, трубка 703 прямая и выдвигается до тех пор, пока не достигнет 702, а трубка 702 выдвигается с изгибом, пока не достигнет 701. Каждая последующая трубка меньше, чем предыдущая.
Что касается определения радиуса трубки для конкретной функции и анатомии, траектория считается возможной только в том случае, если последовательность трубок действительно может разместиться внутри заданной области. Проблемой является то, что анатомия может иметь сложный характер с изменчивым диаметром. Также, чем больше число необходимых маневров, тем больше требуется трубок и тем больший диаметр на входе. Существует три способа определения диаметров трубок на основании заданной траектории и имеющегося свободного пространства. Предлагается также четвертый, предпочтительный способ в соответствии с настоящим изобретением.
1. Способ "грубой силы" заключается в построении траектории и вычислении требуемых внешних диаметров трубок для каждой секции трубки, начиная с самой маленькой. Для каждой точки на этой траектории выполняется проверка на наличие невозможных положений между точкой и расстоянием, равным радиусу. Если имеется пересечение, то эта траектория невозможна, однако в отсутствии каких-либо дополнительных способов, остается положиться на удачу.
2. Очень безопасный способ заключается в сокращении свободного пространства до размера самой большой ожидаемой трубки. В этом методе можно реализовать любую траекторию, находящуюся в этих границах. К сожалению, при этом также отрезается доступ к анатомии, к которой возможен доступ маленькими трубками.
3. Оптимистичный способ состоит в сокращении свободного пространства до размера имеющейся трубки с самым маленьким внешним диаметром. При этом сразу определяются области, к которым доступ невозможен даже для самой маленькой трубки, и области свободного пространства, для которых остается некоторая возможность. Планирование в этом пространстве повышает возможность нахождения возможной траектории, но все же не гарантирует его.
4. Примерный предпочтительный способ содержит следующие основные этапы:
4.1. Предварительное вычисление нескольких версий запрещенной области. Каждая запрещенная область сокращается до внешнего радиуса каждой полезной трубки. Трубка считается полезной только в том случае, если она может быть вставлена вместе с другими трубками, и самая маленькая трубка достаточно велика, чтобы нести запланированную полезную нагрузку или прибор. Запланированное использование активной канюли определяет самую маленькую полезную трубку. Например, если требуется вставить камеру, то эта трубка будет больше, чем в случае, когда запланирован забор пробы жидкости и трубка пустая. Сокращение свободного пространства или, эквивалентно, области, до запрещенного пространства, можно осуществить быстро и только один раз для каждой полезной трубки.
4.2. Выбор затравки в узкой части анатомии вдоль траектории. Для легких предпочтительной затравкой будет, вероятно, дистальное местоположение опухоли, а не центр пищевода. Для мозга следует выбирать самый узкий сосуд, например, глазную артерию, а не сонную артерию. Хотя затравка типично располагается на цели, она также может находиться между целью и точкой входа, например, в сосудистых применениях посередине нароста бляшки.
4.3. Установление запрещенной области на затравке на основании внешнего радиуса наименьшей полезной трубки.
4.4. Отслеживание общего количества изменений трубок от местоположения затравки. Его можно сохранить в конфигурационном пространстве в дополнение к цене до цели. Когда узел расширяется, запрещенная область выбирается на основании количества изменений трубок, и это определяет радиус текущей используемой трубки.
При достижении завершающего узла также определяется радиус требуемой трубки. Использование системы AC в соответствии с настоящим изобретением позволит медицинским работникам достигать целевых местоположений, имеющих относительно маленький диаметр, и/или целевых местоположений, требующих сложных маневров, в конкретной анатомической области.
Метод активной канюли обеспечивает ряд преимуществ по сравнению с другими устройствами направляемого движения, которые включают в себя, без ограничения перечисленным, следующее: (i) эффективное управление и установка телескопического наконечника под углом без применения присоединенных двигателей или марионеточных проводов; (ii) меньший диаметр трубок, чем в традиционных устройствах; (iii) относительно дешевые и обычно одноразовые канюли; (iv) нитинол и подобные материалы позволяют придавать канюлям произвольные формы и изгибы, облегчая вход и/или доступ в сложные области; (v) нитинол пригоден для применения в MRI; (vi) предварительно сформированные конфигурации канюли можно направлять вручную с помощью изображения, а затем регулировать с помощью пьезоэлектрических двигателей, совместимых с MRI; (vii) последовательно уменьшающиеся концентрические канюли соответствуют различным формам, используемым в различных медицинских применениях, где вход осуществляется в область большего размера с последовательным прохождением через все меньшие области; и (viii) можно обеспечить начальное развертывание системы канюли с помощью ручного управления и точного вычисления конфигураций.
Согласно проиллюстрированному аспекту изобретения можно определить стандартный набор канюль, позволяющий достигать множества целей, например, в легком, с помощью конкретной комбинации трубок, которая развертывается индивидуально с углами и длиной выдвижения, вычисленными для конкретного пациента и/или целевого местоположения. Можно вычислить последовательность дуг и прямых трубок, позволяющую достичь конкретного целевого местоположения. Целевые траектории трубок формируются из полученного в результате ряда дуг и прямых трубок. Вычисление траектории можно взвесить, чтобы обеспечить дополнительную выгоду на переходе от одной дуги к другой.
В другом иллюстративном аспекте изобретения можно исключить индивидуальное формирование нитиноловых трубок путем тщательного подбора заданного набора трубок. В одной примерной системе трубки можно вложить одна в другую либо в виде набора фиксированных дуг, либо в виде набора чередующихся прямых и дугообразных трубок. Подготовка соответствующих заранее определенных наборов позволяет упростить и ускорить вычисления траектории. Более того, стандартные наборы канюль можно производить в массовом масштабе без необходимости в индивидуальной формовке и изготовлении. Наличие заранее установленной комбинации потенциально позволяет повторно использовать одну и ту же систему AC, выдвигаемую на различные длины для достижения различных целевых местоположений у одного и того же субъекта во время одной и той же процедуры. Заранее определенные комбинации формы и длины выдвижения для конкретного пациента могут существенно уменьшить затраты, связанные с конкретной медицинской процедурой. Кроме того, ручное развертывание дает медицинскому работнику, такому как хирург, возможность физически направлять и регулировать процесс введения, используя тактильную, визуальную, позиционную и другую обратную связь. Для облегчения точного ручного развертывания можно предпринять, без ограничения перечисленным, следующие конкретные меры:
а) вытравить метки расстояния на трубках, способствующие выдвижению трубки на точное расстояние при каждом движении;
b) вытравить метки ориентации на трубках, способствующие правильной ориентации трубок;
с) если в конкретной ситуации требуется фиксированный набор форм и не предполагается использовать канюлю для другого целевого местоположения, то трубки можно снабдить блокировочным выступом для фиксации правильной ориентации относительно другой трубки, и
d) можно нарезать трубки нужной длины, чтобы каждая последующая трубка заканчивалась в том же самом местоположении, что и трубка большего размера (вмещающая трубка).
Количество трубок в примерной системе AC ограничено диаметром наружной трубки. Можно предпринять следующие меры для уменьшения количества трубок, используемых для достижения целевого местоположения в конкретной анатомической области:
а) ввести в методику вычисления ограничение, чтобы каждый новый тип дуги или ориентации обеспечивал достижимый путь, уменьшая при этом общее число трубок и/или необходимых индивидуально изготовляемых трубок, и
b) включить очень гибкий катетер, проволочный направитель и/или волоконно-оптический элемент на конце последней выдвигаемой трубки для достижения самого дальнего и сложного целевого местоположения.
Примерные системы AC и способы можно использовать для многих медицинских, диагностических и/или хирургических применений, включая диагностику/биопсию рака легких и т.п. Например, можно применять систему AC для выполнения биопсии, используя направление и контроль точной доставки биопсийных приборов по изображению. Система AC в соответствии с настоящим изобретением способствует автофлуоресценции при использовании направления и отслеживания по изображению, а также оптоволоконной передачи и зондирования. Действительно, примерные системы и способы AC в соответствии с настоящим изобретением можно использовать в терапии рака легких для достижения целевых местоположений, недостижимых известными методами.
Примерные системы AC и методы в соответствии с настоящим изобретением можно также использовать в фотодинамической терапии (PDT). PDT уже получила клиническое одобрение и рекомендована для лечения карциномы легких. В примерной процедуре PDT некоторое вещество (например, Photofrin®) вводится за 24-27 часов до терапии, накапливается в раковых участках и активизируется светом с круговым полем диаметром 1 см, направленным на поражение. К сожалению, бронхоскопы достигают только самых крупных дыхательных путей, представляющих около 33% легкого. Меньшие дыхательные пути, в которых происходит кислородный обмен, недостижимы (или их невозможно достичь точно) для современных методов и систем. Система AC в соответствии с настоящим изобретением позволяет достигать относительно меньших целевых местоположений с помощью изображений высокого разрешения и слежения. В примерном варианте настоящего изобретения система AC может работать в сочетании с современной методикой бронхоскопии.
Примерные системы AC можно использовать для биопсии в труднодостижимых анатомических областях, позволяющей определить степень и/или необходимость молекулярной терапии или другого вмешательства. Их также можно использовать для доставки "на место" генерированного электронным путем излучения, например, при использовании миниатюрного источника рентгеновского излучения 2,25 мм Xoft's Axxent. В кардиологии предложенная система AC может быть полезна при оценке сложных участков или ориентаций. В области сосудистой хирургии предложенная система AC позволяет проходить через сложные сосуды, что недостижимо для существующих медицинских методов. Кроме того, уменьшается риск срыва бляшек, так как вложенные одна в другую канюли вызывают трение только на входной части траектории, но не по всей дистальной длине.
Предложенные системы AC также пригодны для проведения минимально инвазивных операций по удалению желчных камней. Канюли можно адаптировать для достижения желчного пузыря с целью удаления. В гастроэнтерологии система AC в соответствии с настоящим изобретением может доставлять PDT в конкретную часть GI и достигать ранее недостижимых целевых местоположений. Можно также достигать целевых местоположений в мозге через минимально инвазивную сосудистую сеть.
Несмотря на то, что был описан пример для трехмерной реализации, данное изобретение также хорошо работает и с двухмерными изображениями, содержащими двухмерные соседства, которые инкапсулируют запрещенные движения устройства.
Хотя настоящее изобретение было описано со ссылками на его примерные варианты, признаки и применения, они не ограничивают предложенные системы и способы. Специалистам будет понятно, что в описанные системы и способы можно внести различные модификации, изменения и усовершенствования, не выходящие за рамки объема притязаний. Такие модификации, изменения и усовершенствования подпадают под объем настоящего изобретения.
Реферат
Группа изобретений относится к медицине. Системы активной канюли содержат множество телескопических, предварительно сформованных нитиноловых трубок. Конфигурация и размеры трубок позволяют достигать целевых местоположений в конкретной анатомической области. Считывают трехмерное изображение конкретной анатомической области. Формируют последовательность дуг между точкой анатомической области и целевым местоположением. Из последовательности дуг вычисляют путь для активной канюли. Этот путь используется для придания конфигурации и размера множеству трубок. Система активной канюли выполнена с возможностью достигать относительно маленьких и сложных целевых местоположений. В результате облегчаются минимально инвазивные хирургические процедуры. 2 н. и 18 з.п. ф-лы, 9 ил.
Формула
(а) считывают изображение анатомической области, (b) формируют последовательность образующих цепь форм траектории между исходным пунктом и пунктом назначения на изображении для формирования пути, и (с) формируют множество концентрических телескопических трубок, функционально сконфигурированных и имеющих размеры для достижения целевого местоположения по сформированному пути, причем основными составляющими общей схемы, конкретизированными для применения активной канюли, являются: дискретизированное конфигурационное пространство, запрещенные состояния, стартовое или целевое состояния, соседство и метрика цены, и дополнительно, после определения основных компонентов система активной канюли выполнена с возможностью построения кратчайшей, свободной от коллизий траектории от фиксированной начальной затравки на основе (i) набора имеющихся изгибов или форм трубок и (ii) движений, разрешенных для этой трубки, которые инкапсулированы в соседство.
Комментарии