Способ, устройство и оборудование для распознавания препятствий или земли и управления полетом, и носитель данных - RU2768997C1
Код документа: RU2768997C1
Чертежи
Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
В отношении настоящей заявки испрашивается приоритет на основании заявки на патент Китая № 201810931105.7, поданной 15 августа 2018 г. компанией GUANGZHOU XAIRCRAFT TECHNOLOGY CO., LTD., под названием «СПОСОБ, УСТРОЙСТВО И ОБОРУДОВАНИЕ ДЛЯ РАСПОЗНАВАНИЯ ПРЕПЯТСТВИЙ ИЛИ ЗЕМЛИ И УПРАВЛЕНИЯ ПОЛЕТОМ, И НОСИТЕЛЬ ДАННЫХ».
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к авиационным технологиям и, в частности, к способу, устройству, оборудованию для распознавания препятствий или земли и управления полетом, и носителю данных.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
С ростом популярности летательных аппаратов все больше и больше людей начинают их изучать и использовать. В настоящее время летательные аппараты в гражданской авиации в основном делятся на летательные аппараты потребительского класса и летательные аппараты промышленного класса (профессионального класса). Данные два типа летательных аппаратов обычно находятся под ручным или автоматическим управлением для осуществления точного управления летательным аппаратом, выполняющим определенные полетные задания. Данные полетные задания включают опрыскивание, аэрофотосъемку, линейное патрулирование, разведывательную съемку, измерения, доставку грузов и т.д.
Во время полета устройство обнаружения в нижней части летательного аппарата может использоваться для удержания летательного аппарата на заданном расстоянии от земли, тем самым выполняя смоделированный полет над местностью, а устройство обнаружения в передней части летательного аппарата используется для определения наличия препятствий перед летательным аппаратом. Когда распознается наличие препятствий перед летательным аппаратом, выполняется операция обхода препятствий.
Однако во время полета летательного аппарата, когда устройство обнаружения в передней части летательного аппарата определяет, что уклон земли перед ним находится в пределах заданного диапазона, летательный аппарат может рассматривать это как препятствие и начать выполнять операцию обхода препятствий, хотя летательный аппарат может выполнять смоделированный полет над местностью. Следовательно, поскольку летательный аппарат не может точно распознать препятствие или землю перед ним, это приводит к конфликтам между смоделированным полетом над местностью и операцией обхода препятствий, что влияет на рабочий процесс и эффективность работы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предметом настоящего изобретения является способ, устройство и оборудование для распознавания препятствий или земли и управления полетом, и носитель данных, которые могут точно распознавать препятствия или землю в области перед летательным аппаратом, тем самым повышая эффективность работы летательного аппарата.
В соответствии с первым аспектом настоящего изобретения предлагается способ распознавания препятствий или земли. Способ включает в себя: этап определения данных облака точек области перед летательным аппаратом; этап разделения передней области на несколько подобластей и определения высоты каждой подобласти в соответствии с данными облака точек в каждой подобласти; и этап выполнения линейной аппроксимации на высотах нескольких подобластей и определения наличия препятствия и/или земли в передней области в соответствии с результатом аппроксимации.
Выполнение линейной аппроксимации на высотах нескольких подобластей включает в себя: выполнение линейной аппроксимации горизонтального расстояния между летательным аппаратом и каждой подобластью в качестве абсциссы и высоты каждой подобласти в качестве ординаты.
Определение наличия препятствия и/или земли в передней области на основе результата аппроксимации включает в себя: определение наличия земли в передней области в случае, когда наклон аппроксимированной линии меньше порогового значения уклона и среднеквадратичная ошибка аппроксимированной линии меньше порога ошибки: и определение наличия препятствия в передней области в остальных случаях.
Выполнение линейной аппроксимации на высотах нескольких подобластей включает в себя: выполнение кусочно-линейной аппроксимации горизонтального расстояния между летательным аппаратом и каждой подобластью в качестве абсциссы и высоты каждой подобласти в качестве ординаты.
Определение наличия препятствия и/или земли в передней области на основе результата аппроксимации включает в себя: определение среднего значения наклонов линий сгенерированных кусочно-линейной аппроксимацией; определение наличия земли в передней области в случае, когда разница между наклоном каждой линии сгенерированной кусочно-линейной аппроксимацией и средним значением меньше первого заданного значения, среднее значение меньше порогового значения наклона, и среднеквадратичная ошибка каждой линии сгенерированной кусочно-линейной аппроксимацией меньше второго заданного значения; и определение наличия препятствия в передней области в остальных случаях.
Разделение передней области на несколько подобластей включает в себя: эквидистантное разделение передней области на подобласти, расположенные по порядку вдоль курса летательного аппарата.
Определение высоты каждой подобласти на основе данных облака точек в каждой подобласти включает в себя: сохранение данных облака точек в массивах соответствующих подобластей; удаление заданного количества данных облака точек из массива подобласти на основе нисходящего порядка высот для каждой подобласти; определение средней высоты на основе оставшихся данных облака точек в массиве; и принятие средней высоты в качестве высоты подобласти.
Определение высоты каждой подобласти на основе данных облака точек в каждой подобласти включает в себя: сохранение данных облака точек в массивах соответствующих подобластей; определение средней высоты на основе всех данных облака точек в массиве для каждой подобласти; и принятие средней высоты в качестве высоты подобласти.
Перед сохранением данных облака точек в массивах соответствующих подобластей, способ дополнительно включает в себя: выполнение обработки понижающей дискретизации данных облака точек.
Способ дополнительно включает в себя: определение области перед летательным аппаратом на основе предварительно заданного маршрута летательного аппарата, положения летательного аппарата и ширины летательного аппарата, при этом расстояние по горизонтали от каждой точки в передней области до летательного аппарата находится в пределах первого заданного диапазона расстояний, а расстояние по вертикали от каждой точки в передней области до летательного аппарата находится в пределах второго заданного диапазона расстояний.
Определение данных облака точек области перед летательным аппаратом включает в себя: определение данных облака точек области обнаружения летательного аппарата и фильтрацию данных облака точек за пределами передней области для получения данных облака точек области перед летательным аппаратом, в котором область обнаружения является эффективной дальностью обнаружения летательного аппарата.
В соответствии со вторым аспектом настоящего изобретения предлагается способ управления полетом. Способ включает в себя: этап определения данных облака точек области перед летательным аппаратом; этап разделения передней области на несколько подобластей и определения высоты каждой подобласти на основе данных облака точек в каждой подобласти; этап выполнения линейной аппроксимации на высотах нескольких подобластей и определения наличия препятствия и/или земли в передней области на основе результата аппроксимации; и этап управления летательным аппаратом для выполнения операции обхода препятствий в случае, если в передней области имеется препятствие, и управления летательным аппаратом для выполнения смоделированного полета над местностью, если в передней области имеется земля.
В соответствии с третьим аспектом настоящего изобретения предлагается устройство для распознавания препятствий или земли. Устройство включает в себя: модуль определения данных облака точек, выполненный c возможностью определения данных облака точек области перед летательным аппаратом; модуль определения высоты, выполненный с возможностью разделения передней области на несколько подобластей и определения высоты каждой подобласти на основе данных облака точек в каждой подобласти; и модуль определения препятствий, выполненный с возможностью выполнения линейной аппроксимации на высотах нескольких подобластей и определения наличия препятствия и/или земли в передней области в соответствии с результатом аппроксимации.
В соответствии с четвертым аспектом настоящего изобретения предлагается устройство для управления полетом. Устройство включает в себя: модуль определения данных облака точек, выполненный с возможностью определения данных облака точек области перед летательным аппаратом; модуль определения высоты, выполненный с возможностью разделения передней области на несколько подобластей и определения высоты каждой подобласти на основе данных облака точек в каждой подобласти; модуль определения препятствий, выполненный с возможностью выполнения линейной аппроксимации на высотах нескольких подобластей и определения наличия препятствия и/или земли в передней области в соответствии с результатом аппроксимации; и модуль управления полетом, выполненный с возможностью управления летательным аппаратом для выполнения операции обхода препятствий в случае, если в передней области имеется препятствие, и управления летательным аппаратом для выполнения смоделированного полета над местностью, если в передней области имеется земля.
В соответствии с пятым аспектом настоящего изобретения также предлагается оборудование. Оборудование включает в себя память, процессор и компьютерную программу, хранящуюся в памяти и исполняемую процессором. Программа выполнена с возможностью, при ее выполнении процессором, осуществлять способ распознавания препятствий или земли или способ управления полетом в соответствии с настоящим изобретением.
В соответствии с шестым аспектом настоящего изобретения также предлагается считываемый компьютером носитель данных. Считываемый компьютером носитель данных имеет компьютерную программу, хранящуюся на нем. Программа выполнена с возможностью, при ее выполнении процессором, осуществлять способ распознавания препятствий или земли или способ управления полетом в соответствии с настоящим изобретением.
В настоящем изобретении область перед летательным аппаратом разделяется на несколько подобластей, данные облака точек области перед летательным аппаратом сопоставляются с соответствующей подобластью, высота подобласти определяется на основе данных облака точек в подобласти, и линейная аппроксимация выполняется на высотах нескольких подобластей таким образом, чтобы на основе результата аппроксимации определить наличие препятствия и/или земли в передней области. Препятствие или земля перед летательным аппаратом могут быть точно распознаны, что позволяет избежать конфликтов между смоделированным полетом над местностью и операцией обхода препятствий, тем самым повышая эффективность работы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
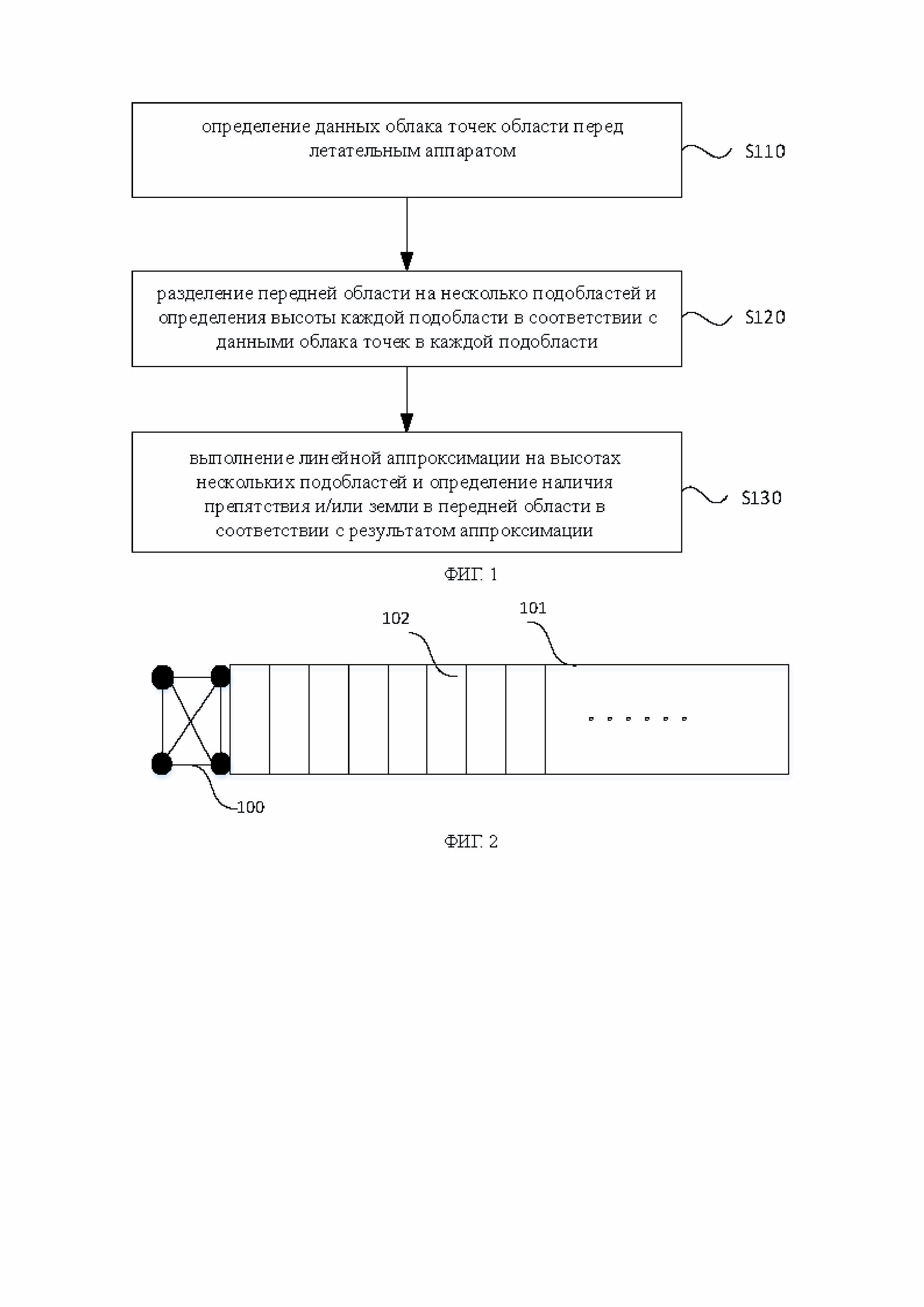
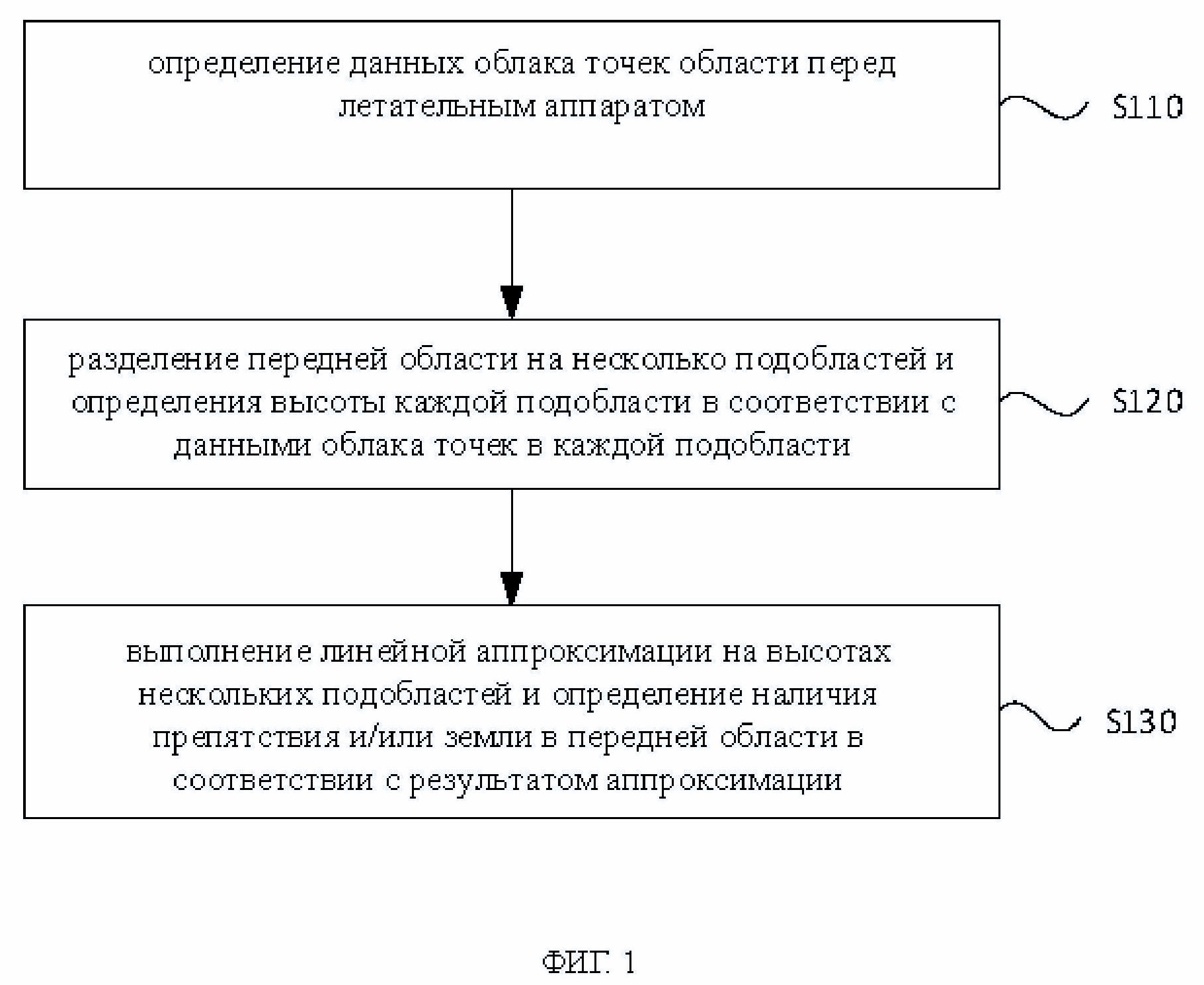
Фиг. 1 - блок-схема способа распознавания препятствий или земли в соответствии с настоящим изобретением;
Фиг. 2 - вид сверху разделенной в продольном направлении области перед летательным аппаратом в соответствии с настоящим изобретением;
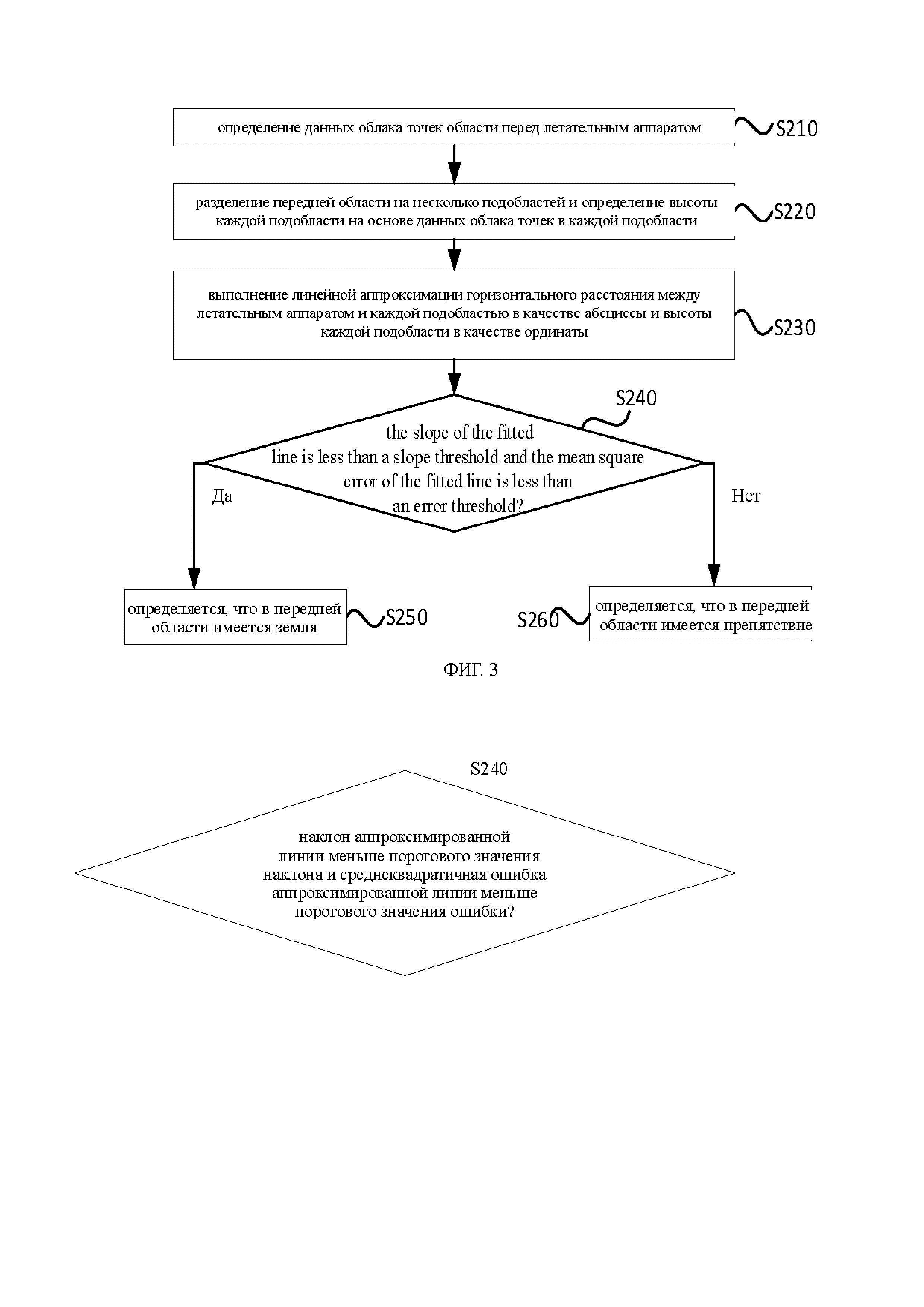
Фиг. 3 - блок-схема еще одного способа распознавания препятствий или земли в соответствии с примером осуществления;
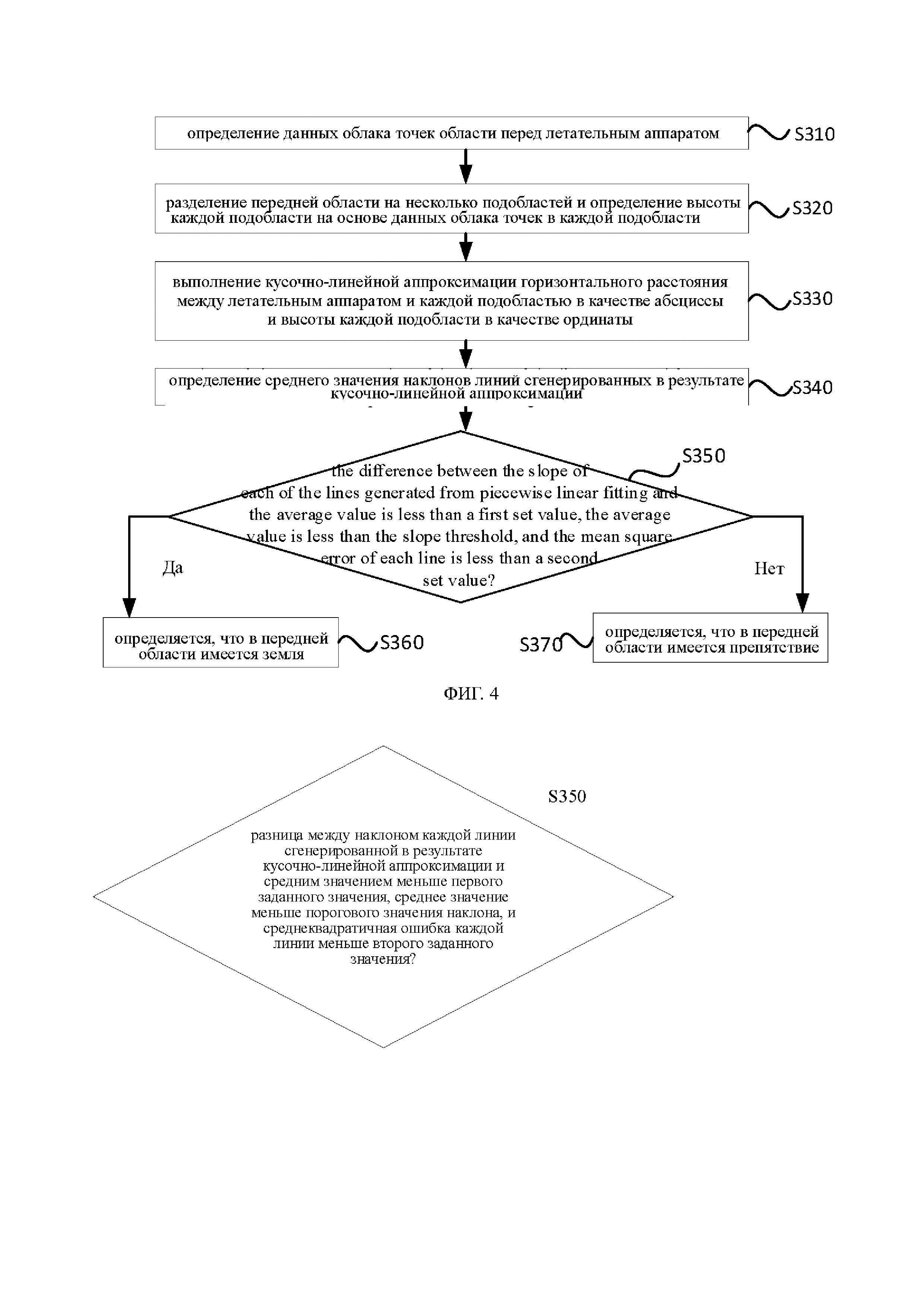
Фиг. 4 - блок-схема еще одного способа распознавания препятствий или земли в соответствии с настоящим изобретением;
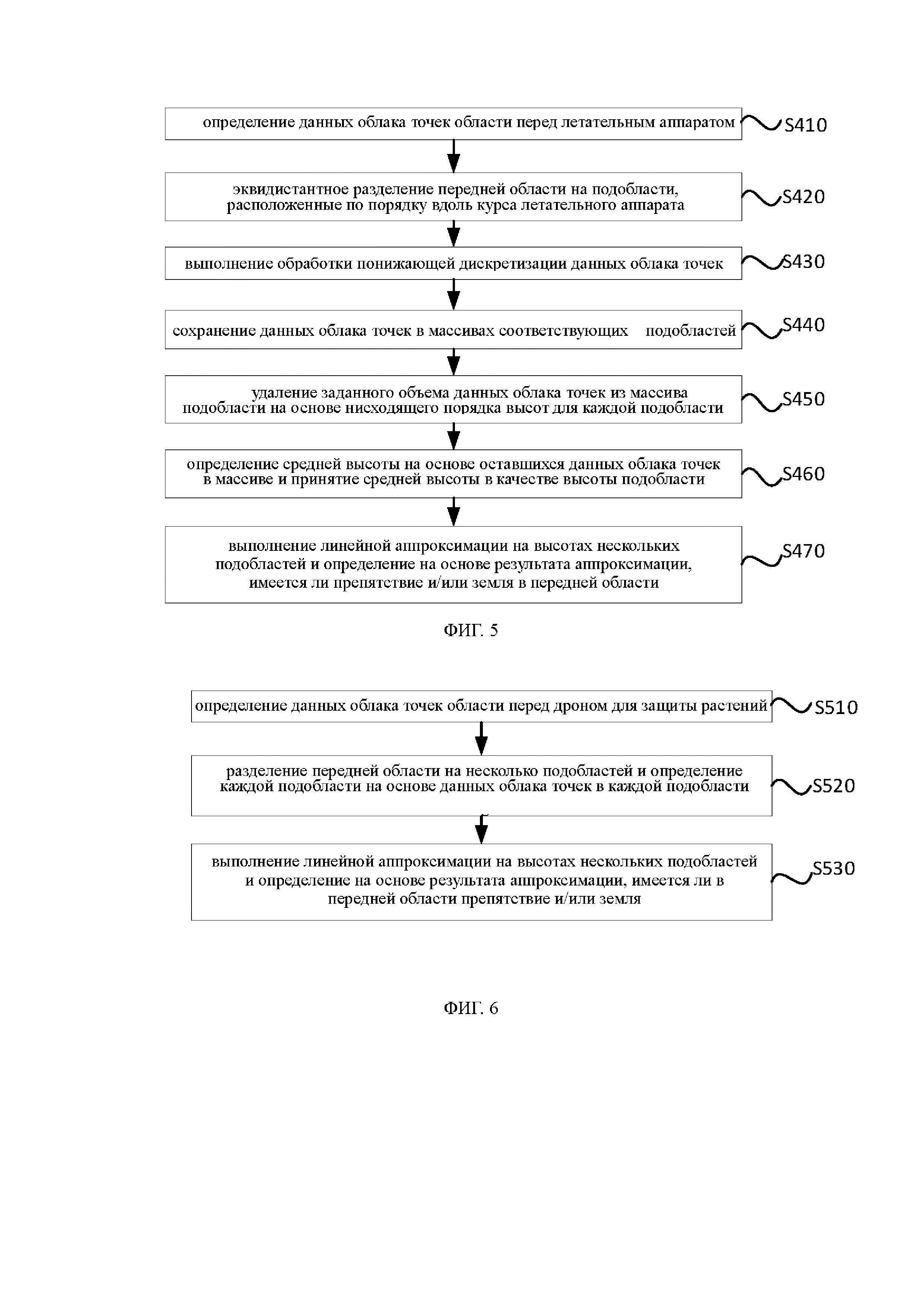
Фиг. 5 - блок-схема еще одного способа распознавания препятствий или земли в соответствии с настоящим изобретением;
Фиг. 6 - блок-схема еще одного способа распознавания препятствий или земли в соответствии с настоящим изобретением;
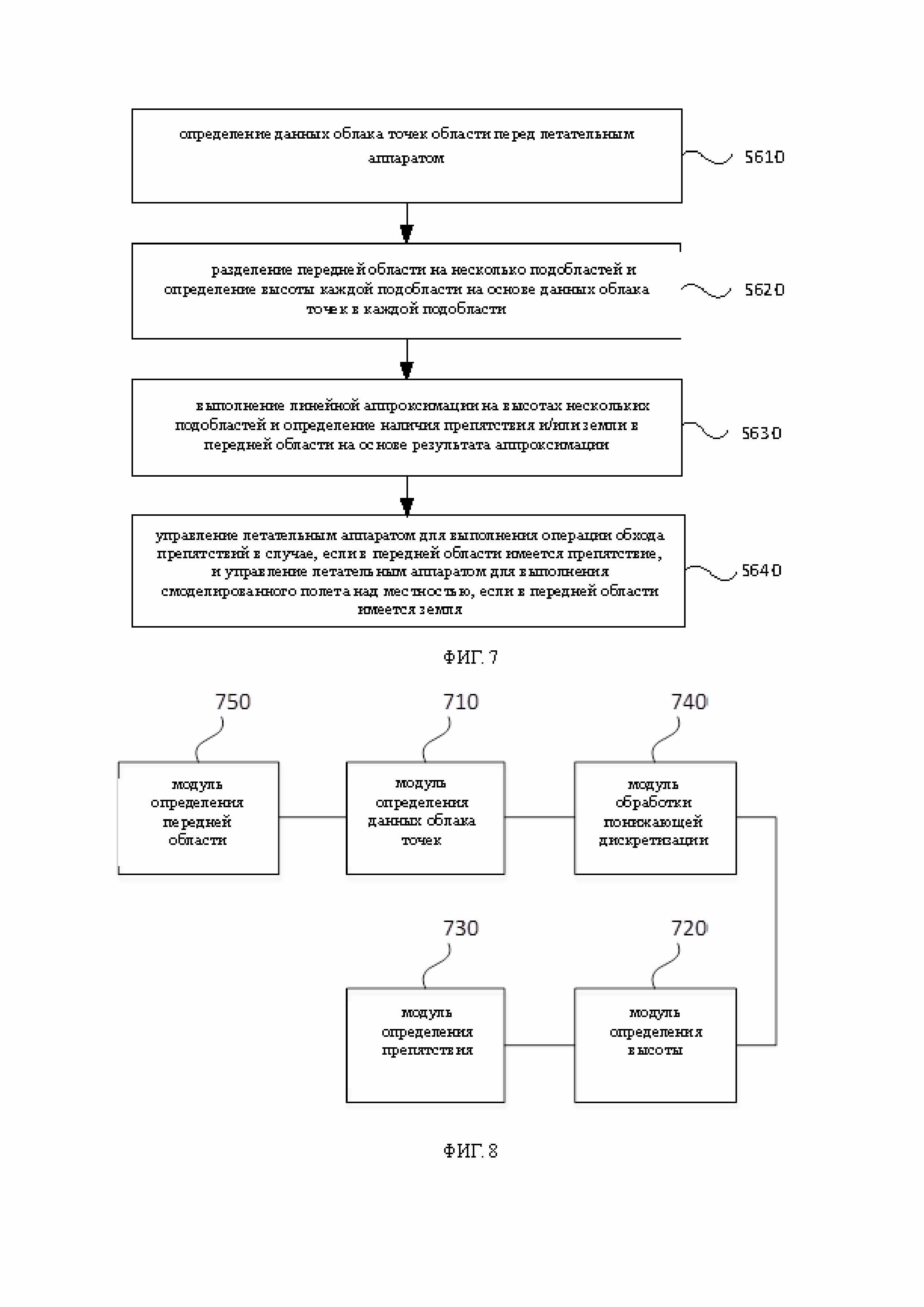
Фиг. 7 - блок-схема способа управления полетом в соответствии с настоящим изобретением;
Фиг. 8 - блок-схема устройства для распознавания препятствий или земли в соответствии с настоящим изобретением;
Фиг. 9 - блок-схема устройства для управления в соответствии с настоящим изобретением;
Фиг. 10 - схематическая диаграмма оборудования в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ
Ниже приводится подробное описание настоящего изобретения вместе с прилагаемыми чертежами. Следует понимать, что то, что здесь описано, используется только для объяснения настоящего изобретения, а не для его ограничения. Также следует отметить, что для удобства описания на чертежах показаны только некоторые части, относящиеся к настоящему изобретению, а не вся конструкция.
Фиг. 1 представляет собой блок-схему способа распознавания препятствий или земли в соответствии с настоящим изобретением. Способ распознавания препятствий или земли выполняется устройством для распознавания препятствий или земли, которое реализовано с помощью программного и/или аппаратного обеспечения. Устройство для распознавания препятствий или земли может быть выполнено на летательном аппарате, а также может быть выполнено в устройстве, которое может связываться с летательным аппаратом, например, терминал, сервер и т.п. Терминал может быть смартфоном, планшетным компьютером, интеллектуальным пультом дистанционного управления и т.п. Сервер может быть облачным или другим типом сервера. Летательный аппарат может быть дроном, при этом дрон может быть дроном для защиты растений.
Способ, предлагаемый в соответствии с настоящим изобретением, может быть применен к сценарию, когда обнаруживается наличие предполагаемого препятствия в области перед летательным аппаратом, и, в частности, к сценарию, когда обнаруживается наличие предполагаемого препятствия в области перед летательным аппаратом в то время когда самолет выполняет такие работы, как распыление, аэрофотосъемка и облет растений. Из числа препятствий предполагаемое препятствие может пониматься как реальное препятствие или нет. Например, когда в области перед летательным аппаратом имеется аппарель, и наклон аппарели находится в пределах определенного диапазона, летательный аппарат может обнаружить аппарель с помощью устройства обнаружения как предполагаемое препятствие.
В предшествующем уровне техники аппарель рассматривается летательным аппаратом как фактическое препятствие, в связи с чем выполняется операция обхода препятствия. Однако наклон аппарели не слишком большой, и летательный аппарат мог бы выполнять смоделированный полет над местностью. Однако, поскольку аппарель рассматривается летательным аппаратом как фактическое препятствие, операция обхода препятствия выполняется в действительности. Следовательно, способ распознавания препятствия или земли в области перед летательным аппаратом в предшествующем уровне техники не подходит, поскольку легко может привести к конфликтам между смоделированным полетом над местностью и операцией обхода препятствия. Способ, предлагаемый в соответствии с настоящим изобретением, может дополнительно распознавать препятствие или землю в области перед летательным аппаратом, тем самым избегая конфликтов между смоделированным полетом над местностью и операцией обхода препятствий.
Как показано на Фиг. 1, техническое решение, предлагаемое в соответствии с настоящим изобретением, включает следующие этапы.
На этапе S110 определяются данные облака точек области перед летательным аппаратом.
В настоящем изобретении летательный аппарат может быть дроном или другими типами летательных аппаратов. Дрон может быть дроном для защиты растений.
Во время полета летательного аппарата область перед летательным аппаратом может быть обнаружена устройством обнаружения, так что определяется препятствие и/или земля в области перед летательным аппаратом. Устройство обнаружения может включать, помимо прочего, многолинейный лидар (LIDAR), бинокулярный датчик дальности, датчик изображения глубины (RGB-D) и т.п. Устройство обнаружения может быть установлено в передней части летательного аппарата. Устройство обнаружения можно включать и выключать в зависимости от реальных условий работы. Например, когда летательный аппарат запускается, устройство обнаружения может быть включено, а когда летательный аппарат завершает выполнение рабочего задания, устройство обнаружения может быть выключено. Устройство обнаружения также может использоваться вместе с другими устройствами обнаружения, например, устройство обнаружения может быть включено, когда другие устройства обнаружения обнаруживают сложный сценарий.
Во время полета летательного аппарата необработанные данные области перед летательным аппаратом могут быть получены устройством обнаружения, а данные облака точек передней области могут быть вычислены из необработанных данных. Например, когда для обнаружения используется многолинейный лидар, расстояние от объекта до летательного аппарата может быть обнаружено многолинейным лидаром. Информация о местоположении для каждой точки на объекте может быть определена на основе расстояния от объекта до летательного аппарата, угла луча обнаружения, излучаемого лидаром, и положения летательного аппарата. Информация о местоположении для каждой точки на объекте может включать координаты широты и долготы, а также высоту объекта. Информация о положении для каждой точки на объекте также может быть преобразована в систему координат тела посредством преобразования координат таким образом, что информация о положении для каждой точки на объекте определяется в системе координат тела. Горизонтальная плоскость центральной оси фюзеляжа может быть плоской системой координат, включающей оси X и Y, а вертикальная плоскость может использоваться в качестве оси Z для получения системы координат тела. Данные облака точек формируются на основе информации о положении каждой точки на объекте. Необработанные данные могут представлять собой угол сканирующего луча, излучаемого лидаром, расстояние между летательным аппаратом и объектом, обнаруженным сканирующим лучом, и т.п.
В другом примере, если для обнаружения используется датчик дальности RGB-D, расстояние между каждой точкой объекта в передней области и летательным аппаратом может быть определено в соответствии с глубиной захваченного изображения и соотношение преобразования между пиксельной системой координат и системой координат тела может быть получено в соответствии с положением установки и углом датчика дальности RGB-D на летательном аппарате. На основе пиксельной координаты каждой точки на объекте на изображении, расстояния между каждой точкой на объекте и летательным аппаратом и отношения преобразования между пиксельной системой координат и системой координат тела каждая точка на объекте может быть отображена в системе координат тела. Необработанные данные могут представлять собой информацию о глубине захваченного изображения, позиции и угла установки датчика дальности RGB-D на летательном аппарате и т.п.
Перед определением данных облака точек области перед летательным аппаратом способ дополнительно включает в себя: определение области перед летательным аппаратом на основе предварительно заданного маршрута летательного аппарата, положения летательного аппарата и ширины летательного аппарата, в котором расстояние по горизонтали от каждой точки передней области до летательного аппарата находится в пределах первого заданного диапазона расстояний, а расстояние по вертикали от каждой точки в передней области до летательного аппарата находится в пределах второго заданного диапазона расстояний. Следовательно, передней областью может быть пространственная область. Когда выполняется распознавание препятствия или земли, передняя область может быть отображена на двухмерной карте, и такая информация как цвета, может использоваться для характеристики высоты препятствия или каждой точки земли в передней области, что облегчает обработку данных, в которой система координат тела, мировая система координат или другие системы координат могут использоваться в качестве системы координат двухмерной карты.
Во время полета летательного аппарата устройство обнаружения в его передней части может обнаружить больше данных облака точек перед летательным аппаратом, но только препятствия в области перед летательным аппаратом могут повлиять на его полет. В качестве альтернативы определение данных облака точек области перед летательным аппаратом включает в себя определение данных облака точек области обнаружения летательного аппарата и фильтрацию данных облака точек за пределами передней области для получения данных облака точек области перед летательным аппаратом, в котором область обнаружения является эффективной дальностью обнаружения летательного аппарата. Переднюю область можно понимать как рабочую область перед летательным аппаратом. Передняя область может быть получена путем принятия положения летательного аппарата за центр, ширины летательного аппарата как поперечной ширины и маршрута летательного аппарата как направления протяженности ширины. Горизонтальное расстояние от каждой точки в передней области до летательного аппарата находится в пределах первого заданного диапазона расстояний, а вертикальное расстояние от каждой точки в передней области до летательного аппарата находится в пределах второго заданного диапазона расстояний. Когда выполняется фильтрация данных облака точек, данные облака точек за пределами передней области могут быть отфильтрованы для получения данных облака точек в передней области. Удалив данные облака точек за пределами передней области и оставив данные облака точек в передней области, можно уменьшить объем обработки данных и повысить эффективность распознавания.
На этапе S120 передняя область делится на несколько подобластей, и высота каждой из подобластей определяется в соответствии с данными облака точек в каждой из подобластей.
Разделение передней области на несколько подобластей может включать в себя эквидистантное разделение передней области на несколько подобластей. То есть передняя область может быть равноудаленно разделена на подобласти, расположенные по порядку вдоль курса летательного аппарата. На Фиг. 2 изображен вид сверху разделенной в продольном направлении области перед летательным аппаратом. Как показано на Фиг. 2, ширина соответствующих подобластей 102 в передней области 101 летательного аппарата 100 одинакова, при этом подобласти 102 расположены по порядку вдоль курса летательного аппарата.
На данном этапе полученные данные облака точек области перед летательным аппаратом сопоставляются с соответствующей подобластью, и высота каждой подобласти определяется на основе данных облака точек в подобласти. Определение высоты каждой из подобластей на основе данных облака точек в каждой из подобластей может включать в себя: сохранение данных облака точек в массивах соответствующих подобластей; удаление заданного количества данных облака точек из массива подобласти на основе нисходящего порядка высот для каждой подобласти; определение средней высоты на основе оставшихся данных облака точек в массиве; и принятие средней высоты в качестве высоты подобласти.
Заданное число может быть значением 1, 2, 3 и т.п., которое имеет определенный верхний предел. Массив каждой подобласти может быть упорядоченным динамическим массивом. Когда данные облака точек сохраняются в массиве соответствующей подобласти, массив упорядочивает данные облака точек на основе высот. Данные облака точек с высотой, превышающей заданное значение высоты в подобласти, также могут быть удалены, а средняя высота подобласти определяется на основе оставшихся данных облака точек и используется в качестве высоты подобласти. Например, данные облаков точек n могут быть последовательно удалены в зависимости от порядка убывания высот; а средняя высота вычисляется на основе оставшихся данных облака точек и используется в качестве высоты подобласти. В качестве альтернативы, определенный объем данных облака точек может быть выбран из оставшихся данных облака точек на основе нисходящего порядка высот, а средняя высота может быть вычислена на основе выбранных данных облака точек и использована в качестве высоты подобласти.
Следовательно, удаляя аномальные данные облака точек и вычисляя высоту на основе оставшихся данных облака точек, неточные данные облака точек могут быть удалены, и высота подобласти может быть точно получена, так что препятствие или земля будут точно распознаны. Например, во время полета летательного аппарата, в случае, когда изображение захватывается датчиком изображения глубины и вычисляются данные облака точек области перед летательным аппаратом, поскольку текстура неба на изображении не распознается точно, когда небо в передней области фиксируется датчиком изображения глубины, можно легко вычислить данные облака точек на основе данных изображения неба на изображении и принять эти данные облака точек в качестве данных облака точек препятствия или земли в области перед летательным аппаратом, что приводит к получению аномальных данных облака точек. Следовательно, поскольку положение неба выше, но не является препятствием в передней области, аномальные данные облака точек на изображении должны быть удалены, то есть данные облака точек с аномальной (большей) высотой должны быть отфильтрованы, тем самым гарантируя точное вычисление высоты подобласти. Аномальная ситуация с данными облака точек не ограничивается вышеупомянутой ситуацией.
Следует отметить, что способ вычисления высоты подобласти не ограничивается вышеупомянутым способом, и данные облака точек также могут быть выбраны, как это требуется для вычисления высоты подобласти. Например, определение высоты каждой из подобластей на основе данных облака точек в каждой из подобластей может дополнительно включать в себя: сохранение данных облака точек в массиве соответствующей подобласти; определение средней высоты на основе всех данных облака точек в массиве; и принятие средней высоты в качестве высоты подобласти. То есть средняя высота подобласти может быть определена на основе всех данных облака точек в подобласти и использоваться как высота подобласти.
Следует отметить, что при разделении передней области эквидистантное разделение может не выполняться. Когда передняя область разделена на равные расстояния, эффективность вычислений может быть повышена при выполнении вычислений с использованием данных облака точек в подобласти.
Следует отметить, что на Фиг. 2 область перед летательным аппаратом, например, разделена на прямоугольные подобласти, но это только один пример настоящего изобретения. В настоящем изобретении форма подобластей также может быть квадратной, трапециевидной, полукруглой или другой формы. Однако это может облегчить вычисление и повысить эффективность вычислений, когда форма подобласти является прямоугольной.
На этапе S130 выполняется линейная аппроксимация на высотах нескольких подобластей, и определяется наличие препятствия и/или земля в передней области на основе результата аппроксимации.
На данном этом линейная аппроксимация высот нескольких подобластей может быть аппроксимацией высот нескольких подобластей в прямую линию. В заданной системе координат могут быть определены положения нескольких подобластей, а также могут быть определены высоты нескольких подобластей. Высоты соответствующих подобластей могут быть аппроксимированы в прямую линию, а препятствие и/или земля в области перед летательным аппаратом могут быть определены в соответствии с характеристиками аппроксимированной прямой линии. Конкретный метод аппроксимации и метод определения будут подробно описаны ниже. В настоящем изобретении область перед летательным аппаратом делится на несколько подобластей, полученные данные облака точек области перед летательным аппаратом сопоставляются с соответствующей подобластью, а высота подобласти определяется на основе данных облака точек в подобласти, и выполняется линейная аппроксимация высот нескольких подобластей, так что препятствие и/или земля в области перед летательным аппаратом распознаются на основе результата аппроксимации, что может точно распознавать препятствие или землю перед летательным аппаратом, тем самым избегая конфликтов между смоделированным полетом над местностью и операцией обхода препятствий, тем самым повышая эффективность работы.
На Фиг. 3 представлена блок-схема способа распознавания препятствия или земли, предлагаемого в соответствии с настоящим изобретением, в котором высоты нескольких подобластей подбираются непосредственно. Как показано на Фиг. 3, техническое решение, предлагаемое в соответствии с настоящим изобретением, включает следующие этапы.
На этапе S210 определяются данные облака точек области перед летательным аппаратом.
На этапе S220 передняя область разделяется на несколько подобластей, и высота каждой подобласти определяется на основании данных облака точек в каждой подобласти.
На этапе S230 выполняется линейная аппроксимация горизонтального расстояния между летательным аппаратом и каждой подобластью в качестве абсциссы и высоты каждой подобласти в качестве ординаты.
На данном этапе горизонтальное расстояние между летательным аппаратом и каждой подобластью может пониматься как горизонтальное расстояние от летательного аппарата до центра каждой подобласти, а также может пониматься как горизонтальное расстояние от летательного аппарата до заданного положения каждой подобласти.
На данном этапе для линейной аппроксимации может использоваться метод наименьших квадратов, и, конечно же, для линейной аппроксимации также могут использоваться другие методы. Например, горизонтальное расстояние между каждой подобластью и летательным аппаратом берется в качестве абсциссы, а высота подобласти берется в качестве ординаты, и, таким образом, может быть указано линейное уравнение.
Обозначим координату первой подобласти как (x1, y1), координату второй подобласти - как (x2, y2) и так далее, координату n-ой небольшой области обозначим как (xn, yn).
Пусть , , , получается методом наименьших квадратов, где среднеквадратичная ошибка равна .
На основе вышеописанного способа может быть вычислен наклон аппроксимированной линии, а также может быть вычислена ее среднеквадратическая ошибка.
На этапе S240 определяется, меньше ли наклон аппроксимированной линии порогового значения наклона и меньше ли среднеквадратичная ошибка аппроксимированной линии порогового значения ошибки.
Если да, выполняется этап S250; если нет, выполняется этап S260.
На этапе S250 определяется, что в передней области имеется земля.
На этапе S260 определяется, что в передней области имеется препятствие.
В настоящем изобретении среднеквадратичная ошибка используется для оценки степени аппроксимации высоты подобласти. Чем меньше среднеквадратичная ошибка, тем лучше степень аппроксимации высоты подобласти. Когда наклон аппроксимированной линии меньше порогового значения наклона, а среднеквадратическая ошибка аппроксимированной линии меньше порогового значения ошибки, определяется, что в передней области имеется земля; в остальных случаях определяется, что в передней области, в которой земля включает равнину или аппарель с наклоном меньше заданного значения, имеется препятствие.
Следует отметить, что если наклон аппарели в области перед летательным аппаратом больше заданного значения, аппарель рассматривается летательным аппаратом как препятствие, и для обеспечения нормального полета может быть выполнена операция обхода препятствия.
Следовательно, путем определения препятствия или земли в области перед летательным аппаратом на основе наклона и среднеквадратичной ошибки аппроксимированной линии можно точно распознать, имеется ли препятствие или земля в передней области.
На Фиг. 4 представлен способ распознавания препятствия или земли, предлагаемый в соответствии с настоящим изобретением, в котором кусочно-линейная аппроксимация выполняется на высотах нескольких подобластей. Как показано на Фиг. 4, техническое решение, предлагаемое в соответствии с настоящим изобретением, включает следующие этапы.
На этапе S310 определяются данные облака точек области перед летательным аппаратом.
На этапе S320 передняя область разделяется на несколько подобластей, и высота каждой подобласти определяется на основании данных облака точек в каждой подобласти.
На этапе S330 выполняется кусочно-линейная аппроксимация горизонтального расстояния между летательным аппаратом и каждой подобласти в качестве абсциссы и высоты каждой подобласти в качестве ординаты.
На данном этапе горизонтальное расстояние между летательным аппаратом и каждой подобластью может пониматься как горизонтальное расстояние от летательного аппарата до центра каждой подобласти, а также может пониматься как горизонтальное расстояние от летательного аппарата до заданного положения каждой подобласти.
Кусочно-линейная аппроксимация может разделять все подобласти на несколько частей и выполнять для каждой части линейную аппроксимацию горизонтального расстояния между самолетом и подобластью в качестве абсциссы и высоты подобласти в качестве ординаты, в результате чего могут получиться несколько аппроксимированных линий. Для каждой части метод линейной аппроксимации может быть таким же, как метод линейной аппроксимации, описанный выше, который не будет здесь подробно описываться.
На этапе S340 определяется среднее значение наклонов линий сгенерированных кусочно-линейной аппроксимацией.
На данном этапе среднее значение наклонов линий сгенерированных в результате кусочно-линейной аппроксимации получается путем вычисления суммы наклонов линий сгенерированных в результате кусочно-линейной аппроксимации, и деления этой суммы на количество линий сгенерированных в результате кусочно-линейной аппроксимации.
На этапе S350 определяется, меньше ли разница между наклоном каждой линии сгенерированной в результате кусочно-линейной аппроксимации и средним значением первого заданного значения, меньше ли среднее значение порогового значения наклона, и меньше ли среднеквадратичная ошибка каждой линии сгенерированной в результате кусочно-линейной аппроксимации второго заданного значения.
Если да, выполняется этап S360; если нет, выполняется этап S370.
На этапе S360 определяется наличие земли в передней области.
На этапе S370 определяется наличие препятствия в передней области.
В настоящем изобретении, когда разница между наклоном каждой линии сгенерированной в результате кусочно-линейной аппроксимации и средним значением наклонов меньше первого заданного значения, это указывает на то, что наклоны линий сгенерированных в результате кусочно-линейной аппроксимации не сильно меняют картину, тем самым показывая, что в области перед летательным аппаратом нет явных выступов; когда среднее значение наклонов меньше порогового значения наклона, это указывает на наличие объекта с небольшим наклоном в области перед летательным аппаратом; и когда среднеквадратичная ошибка каждой линии сгенерированной в результате кусочно-линейной аппроксимации меньше второго заданного значения, это указывает на то, что степень аппроксимации каждой линии сгенерированной в результате кусочно-линейной аппроксимации, лучше.
Когда разница между наклоном каждой линии сгенерированной в результате кусочно-линейной аппроксимации и средним значением меньше первого заданного значения, среднее значение наклонов меньше порогового значения наклона, а среднеквадратичная ошибка каждой линии сгенерированной в результате кусочно-линейной аппроксимации меньше второго заданного значения, определяется, что в передней области, в которой земля включает равнину или аппарель с наклоном меньше заданного значения, имеется земля. В остальных случаях, когда не все вышеперечисленные три условия соблюдены, определяется, что в передней области, в которой препятствие может быть аппарелем с наклоном больше заданного значения и другим препятствием, имеется препятствие.
Следовательно, можно точно определить, имеется ли препятствие или земля в передней области, с помощью кусочно-линейной аппроксимации и путем определения препятствия или земли в области перед летательным аппаратом на основе наклона и среднеквадратичной ошибки каждой линии сгенерированной в результате кусочно-линейной аппроксимации.
На Фиг. 5 представлена блок-схема способа распознавания препятствия или земли, предлагаемого в соответствии с настоящим изобретением. Как показано на Фиг. 5, техническое решение, предлагаемое в соответствии с настоящим изобретением, включает следующие этапы
На этапе S410 определяются данные облака точек области перед летательным аппаратом.
На этапе S420 передняя область эквидистантно делится на подобласти, расположенные по порядку вдоль курса летательного аппарата.
На этапе S430 выполняется обработка понижающей дискретизации данных облака точек.
На данном этапе обработка понижающей дискретизации данных облака точек может быть процессом разбавления данных облака точек и уменьшения объема данных облака точек, тем самым уменьшая объем обработки данных и повышая эффективность.
На этапе S440 данные облака точек сохраняются в массивах соответствующих подобластей.
На этапе S450 для каждой подобласти заданный объем данных облака точек удаляется из массива подобласти на основе нисходящего порядка высот.
На этапе S460 средняя высота определяется на основе оставшихся данных облака точек в массиве, и средняя высота принимается за высоту подобласти.
На этапе S470 аппроксимируются высоты нескольких подобластей, и на основании результате аппроксимации определяется, имеется ли препятствие и/или земля в передней области.
Конкретное выполнение этапа 470 может быть таким, как описано выше.
На Фиг. 6 представлена блок-схема способа распознавания препятствия или земли, предлагаемого в соответствии с настоящим изобретением. В настоящем изобретении летательный аппарат предпочтительно является дроном для защиты растений, и способ, предлагаемый в соответствии с настоящим изобретением, применяется к сценарию, в котором работает дрон для защиты растений.
Как показано на Фиг. 6, техническое решение, предлагаемое в соответствии с настоящим изобретением, включает следующие этапы.
На этапе S510 определяются данные облака точек области перед дроном для защиты растений.
На этапе S520 передняя область разделяется на несколько подобластей, и высота каждой подобласти определяется на основе данных облака точек в каждой подобласти.
На этапе S530 выполняется линейная аппроксимация на высотах нескольких подобластей, и на основе результата аппроксимации определяется, имеется ли в передней области препятствие и/или земля.
Конкретное выполнение этапов в настоящем примере осуществления изобретения такое же, как выполнение соответствующих этапов в вышеупомянутых примерах осуществления изобретения, и здесь больше не повторяется.
Используя вышеупомянутый метод, дрон для защиты растений может точно распознавать препятствие и/или землю в передней области во время работы, тем самым избегая конфликтов между смоделированным полетом над местностью и операцией обхода препятствий, тем самым повышая эффективность работы.
На Фиг. 7 представлена блок-схема способа управления полетом, предлагаемого в соответствии с настоящим изобретением. Способ осуществляется устройством для управления полетом, которое реализовано с помощью программного и/или аппаратного обеспечения. Устройство может быть установлено в летательном аппарате, а также может быть установлено в устройстве, которое может связываться с летательным аппаратом, например, терминал, сервер и т.п. Терминал может быть смартфоном, планшетным компьютером, интеллектуальным пультом дистанционного управления и т.п. Сервер может быть облачным или другим типом сервера. Летательный аппарат может быть дроном,
Способ, предлагаемый в соответствии с настоящим изобретением, может быть применен к сценарию, когда обнаруживается наличие предполагаемого препятствия в области перед летательным аппаратом, и, в частности, к сценарию, когда обнаруживается наличие предполагаемого препятствия в области перед летательным аппаратом в то время когда самолет выполняет такие работы, как распыление, аэрофотосъемка и облет растений. Из числа препятствий предполагаемое препятствие может пониматься как реальное препятствие или нет. Например, когда в области перед летательным аппаратом имеется аппарель, и наклон аппарели находится в пределах определенного диапазона, летательный аппарат может обнаружить аппарель с помощью устройства обнаружения как предполагаемое препятствие.
В предшествующем уровне техники аппарель рассматривается летательным аппаратом как фактическое препятствие, в связи с чем выполняется операция обхода препятствия. Однако наклон аппарели не слишком большой, и летательный аппарат мог бы выполнять смоделированный полет над местностью. Однако, поскольку аппарель рассматривается летательным аппаратом как фактическое препятствие, операция обхода препятствия выполняется в действительности, что легко может привести к конфликтам между смоделированным полетом над местностью и операцией обхода препятствия. Способ, предлагаемый в соответствии с настоящим изобретением, может дополнительно распознавать препятствие или землю в области перед летательным аппаратом, тем самым избегая конфликтов между смоделированным полетом над местностью и операцией обхода препятствий.
Как показано на Фиг. 7, техническое решение, предлагаемое в соответствии с настоящим изобретением, включает следующие этапы
На этапе S610 определяются данные облака точек области перед летательным аппаратом.
На этапе S620 передняя область разделяется на несколько подобластей, и высота каждой подобласти определяется на основе данных облака точек в каждой подобласти.
На этапе S630 выполняется линейная аппроксимация на высотах нескольких подобластей, и определяется на основе результата аппроксимации, имеется ли в передней области препятствие и/или земля.
На этапе S640, если в передней области имеется препятствие, летательному аппарату дают команду выполнять операцию обхода препятствия, а если в передней области имеется земля, летательному аппарату дают команду выполнять смоделированный полет над местностью.
Смоделированный полет над местностью может заключаться в том, что летательный аппарат управляется для поддержания полета на заданном расстоянии по вертикали от земли, и при необходимости также можно управлять другими параметрами, например углом между летательным аппаратом и землей. Процесс операции обхода препятствий может заключаться в том, что определяется информация о параметрах препятствия, а траектория полета, скорость летательного аппарата и его ориентация планируются на основе информации о параметрах препятствия, расстояния между препятствием и летательным аппаратом и т.п. Процесс операции обхода препятствия не ограничивается вышеупомянутым процессом, и могут быть также другие пути.
Выполнение линейной аппроксимации на высотах нескольких подобластей включает себя: выполнение линейной аппроксимации горизонтального расстояния между летательным аппаратом и каждой подобластью в качестве абсциссы и высоты каждой подобласти в качестве ординаты.
Определение наличия препятствия и/или земли в передней области на основе результата аппроксимации включает в себя: определение наличия земли в передней области, когда наклон аппроксимированной линии меньше порогового значения наклона, а среднеквадратичная ошибка аппроксимированной линии меньше порогового значения ошибки; определение наличия препятствия в передней области в остальных случаях.
Выполнение линейной аппроксимации на высотах нескольких подобластей включает в себя: выполнение кусочно-линейной аппроксимации горизонтального расстояния между летательным аппаратом и каждой подобластью в качестве абсциссы и высоты каждой подобласти в качестве ординаты.
Определение наличия препятствия и/или земли в передней области на основе результата аппроксимации включает в себя: определение среднего значения наклонов линий сгенерированных в результате кусочно-линейной аппроксимации; определение наличия земли в передней области в случае, когда разница между наклоном каждой линии сгенерированной в результате кусочно-линейной аппроксимации и средним значением меньше первого заданного значения, среднее значение меньше порогового значения наклона, и среднеквадратичная ошибка каждой линии сгенерированной в результате кусочно-линейной аппроксимации меньше второго заданного значения, и определение наличия препятствия в передней области в остальных случаях.
Разделение передней области на несколько подобластей включает в себя: эквидистантное разделение передней области на подобласти, расположенные по порядку вдоль курса летательного аппарата.
Определение высоты каждой подобласти на основе данных облака точек в каждой подобласти включает в себя: сохранение данных облака точек в массивах соответствующих подобластей; удаление заданного количества данных облака точек из массива подобласти на основе нисходящего порядка высот для каждой подобласти; определение средней высоты на основе оставшихся данных облака точек в массиве; и принятие средней высоты в качестве высоты подобласти.
Определение высоты каждой подобласти на основе данных облака точек в каждой подобласти включает в себя: сохранение данных облака точек в массивах соответствующих подобластей; определение средней высоты на основе всех данных облака точек в массиве для каждой подобласти; и принятие средней высоты в качестве высоты подобласти. В качестве альтернативы, перед сохранением данных облака точек в массивах соответствующих подобластей, способ дополнительно включает в себя: выполнение обработки понижающей дискретизации данных облака точек.
Способ дополнительно включает в себя6 определение области перед летательным аппаратом на основе предварительно заданного маршрута летательного аппарата, положения летательного аппарата и ширины летательного аппарата, при этом расстояние по горизонтали от каждой точки в передней области до летательного аппарата находится в пределах первого заданного диапазона расстояний, а расстояние по вертикали от каждой точки в передней области до летательного аппарата находится в пределах второго заданного диапазона расстояний.
Определение данных облака точек области перед летательным аппаратом включает в себя: определение данных облака точек области обнаружения летательного аппарата и фильтрацию данных облака точек за пределами передней области для получения данных облака точек области перед летательным аппаратом, в котором область обнаружения является эффективной дальностью обнаружения летательного аппарата. В качестве альтернативы летательный аппарат может быть дроном.
В настоящем изобретении область перед летательным аппаратом разделяется на несколько подобластей, данные облака точек области перед летательным аппаратом сопоставляются с соответствующими подобластями, и высота подобласти определяется на основе данных облака точек в подобласти, и линейная аппроксимация выполняется на высотах нескольких подобластей таким образом, чтобы на основе результата аппроксимации определить наличие препятствия и/или земли в передней области. Препятствие или земля перед летательным аппаратом могут быть точно распознаны, что позволяет избежать конфликтов между смоделированным полетом над местностью и операцией обхода препятствий, тем самым повышая эффективность работы.
На Фиг. 8 показано устройство для распознавания препятствий или земли, предлагаемое в соответствии с настоящим изобретением. Как показано на Фиг. 8, устройство, предлагаемое в соответствии с настоящим изобретением, включает модуль 710 определения данных облака точек, модуль 720 определения высоты и модуль 730 определения препятствия.
Модуль 710 определения данных облака точек выполнен с возможностью определения данных облака точек области перед летательным аппаратом
Модуль 720 определения высоты выполнен с возможностью разделения передней области на несколько подобластей и определения высоты каждой подобласти на основе данных облака точек в каждой подобласти.
Модуль 730 определения препятствий выполнен с возможностью выполнения линейной аппроксимации на высотах нескольких подобластей и определения на основе результата аппроксимации наличия препятствия и/или земли в передней области.
Выполнение линейной аппроксимации на высотах нескольких подобластей включает в себя6 выполнение кусочно-линейной аппроксимации горизонтального расстояния между летательным аппаратом и каждой подобластью в качестве абсциссы и высоты каждой подобласти в качестве ординаты.
Определение наличия препятствия и/или земли в передней области на основе результата аппроксимации включает в себя: определение среднего значения наклонов линий сгенерированных кусочно-линейной аппроксимацией; определение наличия земли в передней области в случае, когда разница между наклоном каждой линии сгенерированной в результате кусочно-линейной аппроксимации и средним значением меньше первого заданного значения, среднее значение меньше порогового значения наклона, и среднеквадратичная ошибка каждой линии сгенерированной в результате кусочно-линейной аппроксимации меньше второго заданного значения; и определение наличия препятствия в передней области в остальных случаях.
Разделение передней области на несколько подобластей включает в себя: эквидистантное разделение передней области на подобласти, расположенные по порядку вдоль курса летательного аппарата.
Определение высоты каждой подобласти на основе данных облака точек в каждой подобласти включает в себя: сохранение данных облака точек в массивах соответствующих подобластей; удаление заданного количества данных облака точек из массива подобласти на основе нисходящего порядка высот для каждой подобласти; определение средней высоты на основе оставшихся данных облака точек в массиве; и принятие средней высоты в качестве высоты подобласти.
Определение высоты каждой подобласти на основе данных облака точек в каждой подобласти включает в себя: сохранение данных облака точек в массивах соответствующих подобластей; определение средней высоты на основе всех данных облака точек в массиве для каждой подобласти; и принятие средней высоты в качестве высоты подобласти.
Устройство дополнительно включает модуль 740 обработки понижающей дискретизации. Модуль 740 обработки понижающей дискретизации выполнен с возможностью выполнения обработки понижающей дискретизации данных облака точек перед сохранением данных облака точек в массивах соответствующих подобластей.
Устройство дополнительно включает в себя: модуль 750 определения передней области. Модуль 750 определения передней области выполнен с возможностью определения области перед летательным аппаратом на основе предварительно заданного маршрута летательного аппарата, положения летательного аппарата и ширины летательного аппарата, в котором расстояние по горизонтали от каждой точки передней области до летательного аппарата находится в пределах первого заданного диапазона расстояний, а расстояние по вертикали от каждой точки в передней области до летательного аппарата находится в пределах второго заданного диапазона расстояний.
Модуль 710 определения данных облака точек выполнен с возможностью определения данных облака точек области обнаружения летательного аппарата и фильтрации данных облака точек за пределами передней области для получения данных облака точек области перед летательным аппаратом, в которой область обнаружения является эффективной дальностью обнаружения летательного аппарата. В качестве альтернативы летательным аппаратом может быть дрон.
Вышеупомянутое устройство может осуществлять способ распознавания препятствий или земли, предлагаемый в соответствии с настоящим изобретением, и имеет функциональные модули и полезные эффекты, соответствующие осуществлению способа распознавания препятствий или земли.
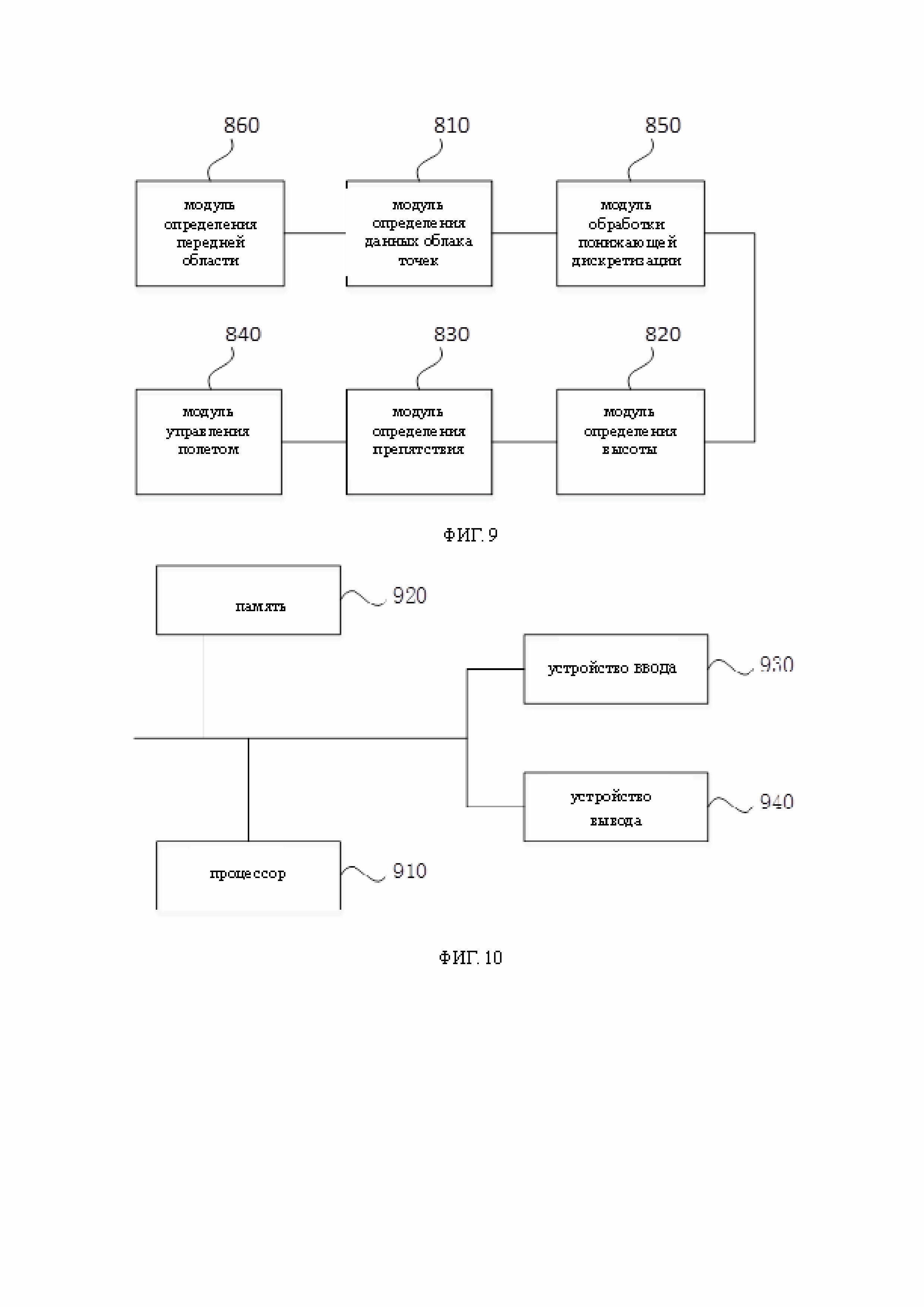
На Фиг. 9 представлено устройство для управления полетом, предлагаемое в соответствии с настоящим изобретением. Как показано на Фиг. 9, устройство, предлагаемое в соответствии с настоящим изобретением, включает в себя: модуль 810 определения данных облака точек, модуль 820 определения высоты, модуль 830 определения препятствия и модуль 840 управления полетом.
Модуль 810 определения данных облака точек выполнен с возможностью определения данных облака точек области перед летательным аппаратом. Модуль 820 определения высоты выполнен с возможностью разделения передней области на несколько подобластей и определения высоты каждой подобласти на основе данных облака точек в каждой подобласти. Модуль 830 определения препятствий выполнен с возможностью выполнения линейной аппроксимации на высотах нескольких подобластей и определения наличия препятствия и/или земли в передней области в соответствии с результатом аппроксимации. Модуль 840 управления полетом выполнен с возможностью управления летательным аппаратом для выполнения операции обхода препятствий в случае, если в передней области имеется препятствие, и управления летательным аппаратом для выполнения смоделированного полета над местностью, если в передней области имеется земля.
Выполнение линейной аппроксимации на высотах нескольких подобластей включает в себя: выполнение кусочно-линейной аппроксимации горизонтального расстояния между летательным аппаратом и каждой подобластью в качестве абсциссы и высоты каждой подобласти в качестве ординаты.
Определение наличия препятствия и/или земли в передней области на основе результата аппроксимации включает в себя: определение среднего значения наклонов линий, сгенерированных кусочно-линейной аппроксимацией; определение наличия земли в передней области в случае, когда разница между наклоном каждой линии сгенерированной в результате кусочно-линейной аппроксимации и средним значением меньше первого заданного значения, среднее значение меньше порогового значения наклона, и среднеквадратичная ошибка каждой лини сгенерированной в результате кусочно-линейной аппроксимации меньше второго заданного значения; и определение наличия препятствия в передней области в остальных случаях.
Разделение передней области на несколько подобластей включает в себя: эквидистантное разделение передней области на подобласти, расположенные по порядку вдоль курса летательного аппарата.
Определение высоты каждой подобласти на основе данных облака точек в каждой подобласти включает в себя: сохранение данных облака точек в массивах соответствующих подобластей; удаление заданного количества данных облака точек из массива подобласти на основе нисходящего порядка высот для каждой подобласти; определение средней высоты на основе оставшихся данных облака точек в массиве; и принятие средней высоты в качестве высоты подобласти.
Определение высоты каждой подобласти на основе данных облака точек в каждой подобласти включает в себя: сохранение данных облака точек в массивах соответствующих подобластей; определение средней высоты на основе всех данных облака точек в массиве для каждой подобласти; и принятие средней высоты в качестве высоты подобласти. В качестве альтернативы устройство дополнительно включает модуль 850 обработки понижающей дискретизации. Модуль 850 обработки понижающей дискретизации выполнен с возможностью выполнения обработки понижающей дискретизации данных облака точек перед сохранением данных облака точек в массивах соответствующих подобластей.
Устройство дополнительно включает в себя: модуль 860 определения передней области. Модуль 860 определения передней области выполнен с возможностью определения области перед летательным аппаратом на основе предварительно заданного маршрута летательного аппарата, положения летательного аппарата и ширины летательного аппарата, в котором расстояние по горизонтали от каждой точки передней области до летательного аппарата находится в пределах первого заданного диапазона расстояний, а расстояние по вертикали от каждой точки в передней области до летательного аппарата находится в пределах второго заданного диапазона расстояний.
Модуль 810 определения данных облака точек выполнен с возможностью определения данных облака точек области обнаружения летательного аппарата и фильтрации данных облака точек за пределами передней области для получения данных облака точек области перед летательным аппаратом, в которой область обнаружения является эффективной дальностью обнаружения летательного аппарата. В качестве альтернативы летательным аппаратом может быть дрон.
Вышеупомянутое устройство может осуществлять способ управления полетом, предлагаемый в соответствии с настоящим изобретением, и имеет функциональные модули и полезные эффекты, соответствующие осуществлению способа управления полетом.
На Фиг. 10 представлена схематическая диаграмма оборудования, предлагаемого в соответствии с настоящим изобретением. Как показано на Фиг. 10, оборудование включает в себя: один или несколько процессоров 910 и память 920. На Фиг. 10 в качестве примера взят один процессор 910. Оборудование может дополнительно включать устройство 930 ввода и устройство 940 вывода.
Процессор 910, память 920, устройство 930 ввода и устройство 940 вывода в оборудовании могут быть соединены через шину или иным образом. На Фиг. 10 в качестве примера взято соединение через шину.
Память 920 представляет собой долговременный считываемый компьютером носитель данных, который может использоваться для хранения программного обеспечения, программ, реализуемых компьютером, и модулей, таких как программные инструкции/модули, соответствующие способу распознавания препятствий или земли в соответствии с настоящим изобретением (например, модуль 710 определения данных облака точек, модуль 720 определения высоты и модуль 730 определения препятствий, показанные на Фиг. 8, или модуль 810 определения данных облака точек, модуль 820 определения высоты, модуль 830 определения препятствия и модуль 840 управления полетом, показанные на Фиг. 9). Процессор 910 выполняет различные функциональные приложения и обработку данных компьютерного устройства путем запуска программ, инструкций и модулей, хранящихся в памяти 920, т.е. осуществляет способ распознавания препятствий или земли, как описано выше, а именно: определение данных облака точек области перед летательным аппаратом; разделение передней области на несколько подобластей и определение высоты каждой подобласти на основе данных облака точек в каждой подобласти; и выполнение линейной аппроксимации на высотах нескольких подобластей, и определение на основе результата аппроксимации наличия препятствия и/или земли в передней области.
В качестве альтернативы также может быть осуществлен способ управления полетом, описанный выше, а именно: определение данных облака точек области перед летательным аппаратом; разделение передней области на несколько подобластей и определение высоты каждой подобласти на основе данных облака точек в каждой подобласти; выполнение линейной аппроксимации на высотах подобластей и определение наличия препятствия и/или земли в передней области в соответствии с результатом аппроксимации; и управление летательным аппаратом для выполнения операции обхода препятствий в случае, если в передней области имеется препятствие, и управление летательным аппаратом для выполнения смоделированного полета над местностью, если в передней области имеется земля.
Память 920 может включать область хранения программ и область хранения данных, где область хранения программ может хранить операционную систему и прикладные программы, необходимые, по меньшей мере, для одной функции, а область хранения данных может хранить данные, созданные на основе использования компьютерного устройства и т.п. Кроме того, память 920 может включать высокоскоростную память с произвольным доступом, а также может включать долговременную память, например, по меньшей мере, одно запоминающее устройство на магнитных дисках, устройство флэш-памяти или другое долговременное твердотельное запоминающее устройство. В качестве альтернативы память 920 может включать блоки памяти, удаленно установленные по отношению к процессору 910, и эти удаленные блоки памяти могут быть подключены к оконечному устройству через сеть. Примеры вышеупомянутой сети включают, но не исключительно, Интернет, интрасеть, локальную сеть, сеть мобильной связи и их комбинации.
Устройство 930 ввода может использоваться для приема введенной числовой или символьной информации и генерирования входных сигналов клавиш, связанных с пользовательскими настройками и управлением функциями компьютерного устройства. Устройство 940 вывода может включать устройство отображения, такое как экран дисплея.
В соответствии с настоящим изобретением предлагается считываемый компьютером носитель данных, на котором хранится компьютерная программа. При выполнении программы процессором, процессор осуществляет способ распознавания препятствий или земли в соответствии с настоящим изобретением, а именно: определение данных облака точек области перед летательным аппаратом; разделение передней области на несколько подобластей и определение высоты каждой подобласти на основе данных облака точек в каждой подобласти; и выполнение линейной аппроксимации на высотах нескольких подобластей, и определение на основе результата аппроксимации наличия препятствия и/или земли в передней области.
В качестве альтернативы, при выполнении программы процессором, программа может также осуществлять способ управления полетом, предлагаемый в соответствии с настоящим изобретением, а именно: определение данных облака точек области перед летательным аппаратом; разделение передней области на несколько подобластей и определение высоты каждой подобласти на основе данных облака точек в каждой подобласти; выполнение линейной аппроксимации на высотах подобластей и определение наличия препятствия и/или земли в передней области в соответствии с результатом аппроксимации; и управление летательным аппаратом для выполнения операции обхода препятствий в случае, если в передней области имеется препятствие, и управление летательным аппаратом для выполнения смоделированного полета над местностью, если в передней области имеется земля.
Может использоваться любая комбинация одного или нескольких считываемых компьютером носителей. Считываемый компьютером носитель может быть считываемым компьютером сигнальным носителем или считываемым компьютером носителем данных. Считываемый компьютером носитель данных может быть, например, среди прочих, электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой, аппаратом или устройством, или любой их комбинацией. Более конкретные примеры (неполный список) считываемых компьютером носителей данных включают электрические соединения с одним или несколькими проводами, портативные компьютерные диски, жесткие диски, память с произвольным доступом (RAM), память только для чтения (ROM), стираемая программируемая постоянная память (EPROM или флэш-память), оптическое волокно, портативный компакт-диск с постоянной памятью (CD-ROM), оптическое запоминающее устройство, магнитное запоминающее устройство или любая подходящая комбинация вышеперечисленного. В настоящем документе считываемый компьютером носитель данных может быть любым материальным носителем, который содержит или хранит программу, которая может использоваться системой, аппаратом или устройством выполнения команд или в сочетании с ними.
Считываемый компьютером носитель сигнала может включать сигнал данных в основной полосе частот или распространяемый как часть несущей волны, которая несет считываемый компьютером программный код. Такой распространяемый сигнал данных может быть во многих формах, включая, помимо прочего, электромагнитные сигналы, оптические сигналы или любую подходящую комбинацию вышеперечисленного. Считываемый компьютером носитель сигналов также может быть любым считываемым компьютером носителем, отличным от считываемого компьютером носителя данных, и считываемый компьютером носитель может отправлять, распространять или передавать программу для использования системой, аппаратом или устройством выполнения команд или в сочетании с ними.
Программные коды, установленные на считываемом компьютером носителе, могут передаваться с использованием любого подходящего носителя, включая, помимо прочего, беспроводную связь, проводную связь, волоконно-оптический кабель, RF и т.д. или любую подходящую комбинацию вышеизложенного.
Компьютерные программные коды для выполнения операций в соответствии с настоящим изобретением могут быть написаны на одном или нескольких языках программирования или их комбинациях, которые включают в себя объектно-ориентированные языки программирования, такие как Java, Smalltalk, C ++, и традиционный язык процедурного программирования, такой как «C» или аналогичный язык программирования. Программные коды могут выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как независимый программный пакет, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В случае удаленного компьютера удаленный компьютер может быть подключен к компьютеру пользователя через сеть любого типа, включая локальную сеть (LAN) или глобальную вычислительную сеть (WAN), или он может быть подключен к внешнему компьютеру (например, через подключение к Интернету, предоставляемое поставщиком услуг Интернета).
Необходимо отметить, что выше представлены только предпочтительные варианты осуществления настоящего изобретения и применяемые технические принципы. Для специалистов в данной области техники будет понятным, что раскрытие настоящего изобретения не ограничивается конкретными вариантами его осуществления, приведенными в настоящем описании, и специалисты в данной области техники могут сделать различные очевидные изменения, корректировки и замены, не выходя за пределы объема защиты настоящего изобретения. Следовательно, хотя настоящее изобретение было описано более подробно посредством вышеупомянутых вариантов его осуществления, настоящее раскрытие изобретения не ограничивается только вышеупомянутыми вариантами его осуществления. Без отступления от концепции раскрытия настоящего изобретения, в него могут быть включены другие соответствующие варианты осуществления изобретения, при этом объем правовой охраны настоящего изобретения определяется объемом прилагаемой формулы изобретения.
Реферат
Группа изобретений относится к двум вариантам способа, устройству и оборудованию для распознавания препятствий или земли, способу и устройству для управления полетом, компьютерочитаемому носителю данных. Для распознавания препятствий с помощью соответствующих модулей устройства для распознавания определяют данные облака точек области перед летательным аппаратом, разделяют переднюю область на несколько подобластей и определяют высоты каждой подобласти, выполняют линейную аппроксимацию на высотах нескольких подобластей и в соответствии с нею определяют наличие препятствий или земли. Устройство для управления полетом содержит дополнительно модуль управления полетом. Оборудование для распознавания препятствий или земли и управления полетом содержит память, процессор и компьютерную программу для осуществления способа. Обеспечивается повышение точности распознавания препятствий или земли. 6 н. и 10 з.п. ф-лы, 10 ил.
Комментарии