Способ и устройство для предотвращения столкновения летательного аппарата с землей - RU2124760C1
Код документа: RU2124760C1
Чертежи












Описание
Изобретение относится к области вспомогательных средств воздушной навигации.
Указанные вспомогательные средства включают способы, позволяющие летательному аппарату определять свое положение и способы, направленные на задание его высоты по отношению к Земле.
В настоящее время большинство летательных аппаратов оснащено центральной инерционной станцией, которая позволяет следить за их местонахождением, начиная с момента взлета. Инерционная станция представляет составляющие для векторов скорости и ускорения летательного аппарата, а также соответствующие углы. На основании этих данных можно получить информацию о местонахождении летательного аппарата, но с некоторым отклонением.
Полученные таким образом информационные данные о местонахождении могут быть приближены к данным, полученным с помощью других радионавигационных способов. Например, используются измерения системы под названием "Глобальная система местонахождения", или GPS c фильтрацией Кальмана. Она может в конечном итоге дать довольно точную информацию о местонахождении по широте и долготе. По высоте более важную роль играет отклонение.
Как показывает опыт, измерение высоты летательного аппарата является достаточно сложной задачей. Высота по отношению к уровню моря определяется с помощью измеряющих средства, называемых "баро-инерционными", но они требуют периодического корректирования.
Наряду с этим, радиоальтиметр указывает высоту летательного аппарата по отношению к Земле, или "высоту радиоволны"; но речь идет о мгновенном значении местоположения; его характеристики зависят от топографического положения самолета; т.к. оно влияет на то, как пучок радиоволн освещает Землю. Кроме того, невозможно предсказать последующий ход событий.
Эти меры достаточны во время пересечения воздушной линии полета, если по крайней мере есть уверенность, что летательный аппарат движется на большой высоте.
В любом случае возникает проблема в ходе предварительного захода на посадку, как и после взлета; в этих двух случаях летательный аппарат обязательно находится вблизи Земли, что может вызвать опасность столкновения.
Для анализа этих проблем, относящихся к посадке и взлету, было предложено прибегнуть к системам предупреждения, находящимся на Земле, так называемым "Наземным системам предупреждения", сокращено GPWS (не путать с системами местонахождения - GPS).
Системы GPWS позволили достичь определенного прогресса, однако они не могут удовлетворить все требования.
Изобретение предлагает другое решение задачи на основе другого подхода.
Важнейшая задача, лежащая в основе изобретения, заключается в том, чтобы позволить летательному аппарату избежать столкновения с Землей, над которой он пролетает, при любых обстоятельствах представляющей опасность.
Более конкретно, изобретение направлено на достижение возможности убедиться в том, что в любой момент летательный аппарат не находится по отношению к Земле в ситуации, представляющей непосредственную опасность. Изобретение также имеет целью проверить, что траектория движения летательного аппарата в ближайшее время не приведет его к возникновению опасной ситуации по отношению к Земле.
Изобретение также направлено на создание бортового устройства, не чувствительного к метеорологическим условиям, способного функционировать постоянно независимо от информационных систем, систем контроля и безопасности, находящихся на Земле.
Кроме того, изобретение направлено на возможность предоставить пилоту маневр, предупреждающий столкновение, в случае опасности и при необходимости в некоторых случаях автоматизировать подобный маневр.
Изобретение имеет также предположение предоставить пилоту синтетическое изображение местности в конкретное время, на расстоянии видимости.
Изобретение предполагает также улучшить эргономику и безопасность пилотирования летательным аппаратом.
Изобретение должно предоставить возможность регулярного выявления или корректирования местности из базы данных с помощью информации, полученной группой летательных аппаратов, экипированных в соответствии с изобретением.
В соответствии с первым аспектом изобретения предлагаемое устройство содержит массовое запоминающее устройство для хранения баз данных, представляющих по крайней мере значительную часть Земного шара, в виде среза, включающего построение модульных ячеек на одном уровне. Преимущественно, построение модульных ячеек включает основные ячейки, промежуточные ячейки, разделяющие определенные основные ячейки и крайние ячейки, делящие в свою очередь промежуточные ячейки. Предусматривается, что указанные промежуточные и крайние ячейки соответствуют зонам, расположенным вблизи аэропортов.
Каждая ячейка связана с одним значением, представляющим максимальную высоту внутри ячейки. Кроме того, предусматривается наличие воспроизводящего устройства с одним указателем, обеспечивающим быстрый доступ к комплекту прилегающих соседних ячеек, которые содержатся в указанной базе данных, посредством адресации в горизонтальных координатах, таких как широта и долгота.
Прибор имеет также вход для ввода данных о текущем состоянии, выраженных, например, в географических координатах и включающих широту и долготу, высоту и векторы скорости и ускорения самолета вместе с показаниями соответствующих углов. Кроме того, принимаются сигналы управления, поступающие с поста пилотирования.
Базой данных управляют электронные средства. В зависимости от данных о текущем состоянии они извлекают и обрабатывают в быстродействующем запоминающем устройстве информацию, представляющую локальную временную карту (географическую карту). Эта карта определяет огибающую по высоте местности в той зоне, где движется летательный аппарат.
Наконец, обрабатывающие средства перерабатывают информацию о текущем состоянии с целью определения множества точек, предсказывающих траекторию движения летательного аппарата; в каждой точке они будут сравнивать контур зоны безопасности вокруг него с огибающей по высоте в соответствующей части локальной карты. Срабатывает сигнал тревоги, если отношение между зоной безопасности и огибающей по высоте удовлетворяет выбранному условию (закон о предотвращении столкновения).
Преимущественно это условие задается, по крайней мере частично, запасом безопасности по высоте и/или другими командами, поступающими с поста пилотирования.
В частности, закон о предупреждении столкновения выражает тот факт, что вертикальное расстояние между зоной безопасности и огибающей по высоте остается по крайней мере равным запасу безопасности по высоте для точек, предсказывающих траекторию летательного аппарата. Могут возникнуть более сложные положения.
В соответствии с другим аспектом изобретения средства обработки данных устроены таким образом, чтобы подать предупреждающий сигнал тревоги, указывающий на опасность столкновения с Землей. Через средний промежуток времени в зависимости по крайней мере от одного закона о предупреждении столкновения с Землей. Этот закон может учитывать тот факт, что летательный аппарат движется по прямой или поворачивает.
Средства управления базой данных используют в основном изменение опорных точек в зонах, окружающих земные полюса. В равной степени они придают ячейкам размер, зависящий от широты в направлении земных параллелей.
Большое преимущество заключается в том, что ячейки сгруппированы в блоки, или панели, при этом каждый блок ассоциируется с одним заданным значением высоты, выраженным как абсолютное значение, в то время как максимальная высота в каждой ячейке выражена как относительная величина по отношению к соседней ячейке в соответствии с предопределяющим законом обхода контура внутри блока. Преимущественно, каждый блок имеет напуск, равный одной базовой ячейке с двух сторон, смежных с другими ячейками.
В соответствии с другим аспектом изобретения прибор имеет средства для воссоздания синтетического изображения местности в зависимости от содержимого локального запоминающего устройства.
Ниже рассматривается наиболее важный аспект настоящего изобретения. В процессе полета устройство имеет возможность сравнивать участок местности, определенный локальным запоминающим устройством, с участком, определенным с помощью бортовых приборов. Результаты этого сравнения могут быть использованы и/или же служить в качестве достоверных доказательств правильного функционирования прибора.
Более того, предусмотрены средства записи различий, выявленных при этом сравнении. После проверки необходимых сведений путем сопоставления эти отличия послужат для уточнения основной базы данных местности, находящейся на Земле.
Изобретение может в равной степени быть представлено в виде вспомогательного способа в воздушной навигации. Этот способ имеет такие же варианты, как и устройство, описанное выше.
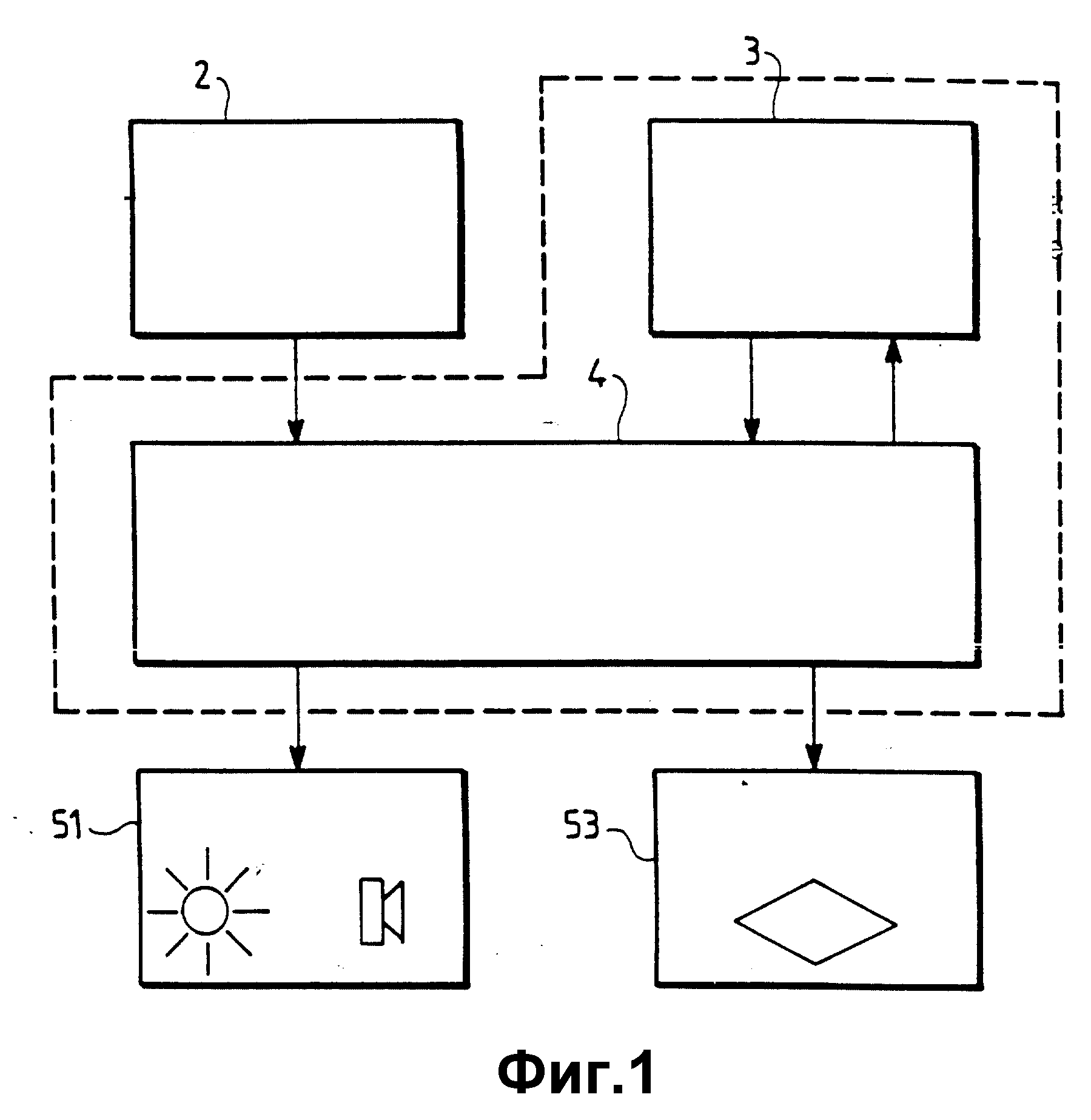
В дальнейшем изобретение поясняется описанием вариантов его выполнения со ссылкой на чертежи, на которых фиг.1 изображает блок-схему устройства согласно изобретению, фиг. 2 - более детальную блок-схему устройства согласно изобретению, фиг. 3 - дополнительную блок-схему устройства согласно изобретению, фиг. 4А и 4Б - две дополнительные расширенные блок-схемы заявленного устройства, обобщенные для их сопоставления, фиг. 5 - определение ячеек согласно изобретению, фиг. 6 - вид в перспективе, показывающий взаимосвязь между двумя следующими друг за другом ячейками, фиг. 7 - группировку ячеек в панели, фиг. 8 и 9 - напуск панелей, фиг. 10а, б, в - различные способы расчета на основе информационных данных абсолютной высоты, заложенной в запоминающее устройство для панелей, фиг. 11 и 12 - принцип способа проверки высоты, заложенной в запоминающее устройство, фиг. 13 - область погрешности, фиг. 14 - погрешность, связанную с траекторией летательного аппарата, фиг. 15А и 15Б - соответственно предусмотренную траекторию движения и правильно подобранный профиль запасной высоты, который ей соответствует, фиг. 16 - схематично эволюцию положения летательного аппарата по отношению к карте, находящейся в локальном запоминающем устройстве. фиг. 17А и 17Б - определение взаимосвязи между положением летательного аппарата и данными локального запоминающего устройства, фиг. 18 - пример защитной кривой предупреждения столкновения, фиг. 19 и 20 - вид в вертикальном разрезе, иллюстрируя различные ситуации летательного аппарата перед лицом опасности, фиг. 21 - траектории, позволяющую избежать столкновения, фиг. 22а и 22б - две кривые местности, фиг. 23а и 23б - два сигнала отклонения, относящихся к кривым местности, представленным на фиг. 22а и 22б, фиг. 24 - механизм анализа этих сигналов отклонения.
Прилагаемые чертежи в основном носят определенный характер и являются неотъемлемой частью настоящего описания. Они могут служить не только для лучшего толкования изобретения, но также способствовать тому, чтобы реализовать изобретение.
В общем случае, в настоящем описании выражение "командный пост" (или "пост пилотирования") относится к обязательным функциям пилотирования, даже если они осуществляются вручную или автоматически. Под обязательными функциями пилотирования следует понимать функции пилотирования в узком смысле и функции навигации. В другом плане модно будет различить сами функции и их взаимодействие между человеком и машиной.
В соответствии с фиг. 1-4Б устройство предназначено главным образом для установки на борту летательного аппарата. Летательный аппарат имеет на борту оборудование 2, способное подавать в виде электрических сигналов обозначения параметров полета, а именно (фиг. 3), инерционную станцию 20 или INU (" сертифицированный" материал), радионавигационный прибор типа GPS, обозначенный 21, вместе с антенной ("несертифицированный" материал), радиоальтиметр 22 вместе со своей антенной.
Инерционная станция 20 определяет составляющие векторов скорости (V) и ускорения (GAMMA) летательного аппарата. Отсюда можно вычислить соответствующие характерные углы, а именно, углы падения, бокового поворота, наклона, бортовой качки, курса, приземления.
Однако в той мере, в какой инерционная станция замеряет и/или использует некоторые из этих углов для определения векторов скорости и ускорения, желательно получить непосредственно значения инерционной станции для названных углов там, где они нужны, чтобы осуществить изобретение. Эти значения углов могут быть указаны и/или использованы на командном пункте.
Для определения высоты инерционная станция связана известным способом с барометрическим альтиметром (не показан).
Ниже расшифровывается ряд обозначений:
Zb - барометрическая высота, измеренная в зависимости от атмосферного давления, изменяется в зависимости от высоты и метеорологических условий,
Zi - инерционная высота, рассчитанная путем двойной интеграции вертикального ускорения, указывается акселерометрами инерционной станции (изменения в течение длительного промежутка времени),
Zbi - баро-инерционная высота, т.е. Zb, рассчитанная через Zi (например, контур третьего порядка),
Zc - расчетная высота (HRS+Zta), где HRS - высота радиоволны, показанная одним или
несколькими радиоальтиметрами летательного аппарата (с точностью до нескольких метров), Zta - высота местности под летательным аппаратом, взятая из базы данных местности (определенная ниже),
Zgps - высота, полученная по GPS.
В течение длительного периода времени летательные аппараты оснащены аккумуляторной батареей инерционной станции и логической схемой решения с учетом всех показаний станции.
Для осуществления изобретения заявитель считает в настоящее время предпочтительным взять информационные данные одной из станций (по мере их подтверждения).
Радионавигационный прибор 21 выдает необработанные показания широты L, долготы G1 и высоты Z1(= Zgps), обновляемые с частотой кадров P1 от нескольких секунд до нескольких минут. Путем интеграции через векторы скорости и ускорения инерционная станция 20 представляет другие менее точные данные широты 10 долготы G0 и высоты ZO(=Zbi), но взятые из "сертифицированного" материала. Блок 25 сравнивает два типа измерений и признает действительными величины L, G1, Z1, если они совпадают с L0, G0, Z0. Такая технология проверки широко известна. Проверенные значения L2, G2, Z2 выдаются с частотой p1 и уточняются инерционной станцией с частотой p2 с точностью примерно до 1 секунды.
Блок 28 экстраполирует информационные данные между последним этапом замеров с помощью прибора 21 и настоящим этапом (эта экстраполяция используется в случае возникновения проблем с темпом подачи информации, этот темп может быть слишком низким).
Радиоальтиметр 22 указывает высоту над Землей, высота обозначена через HRS.
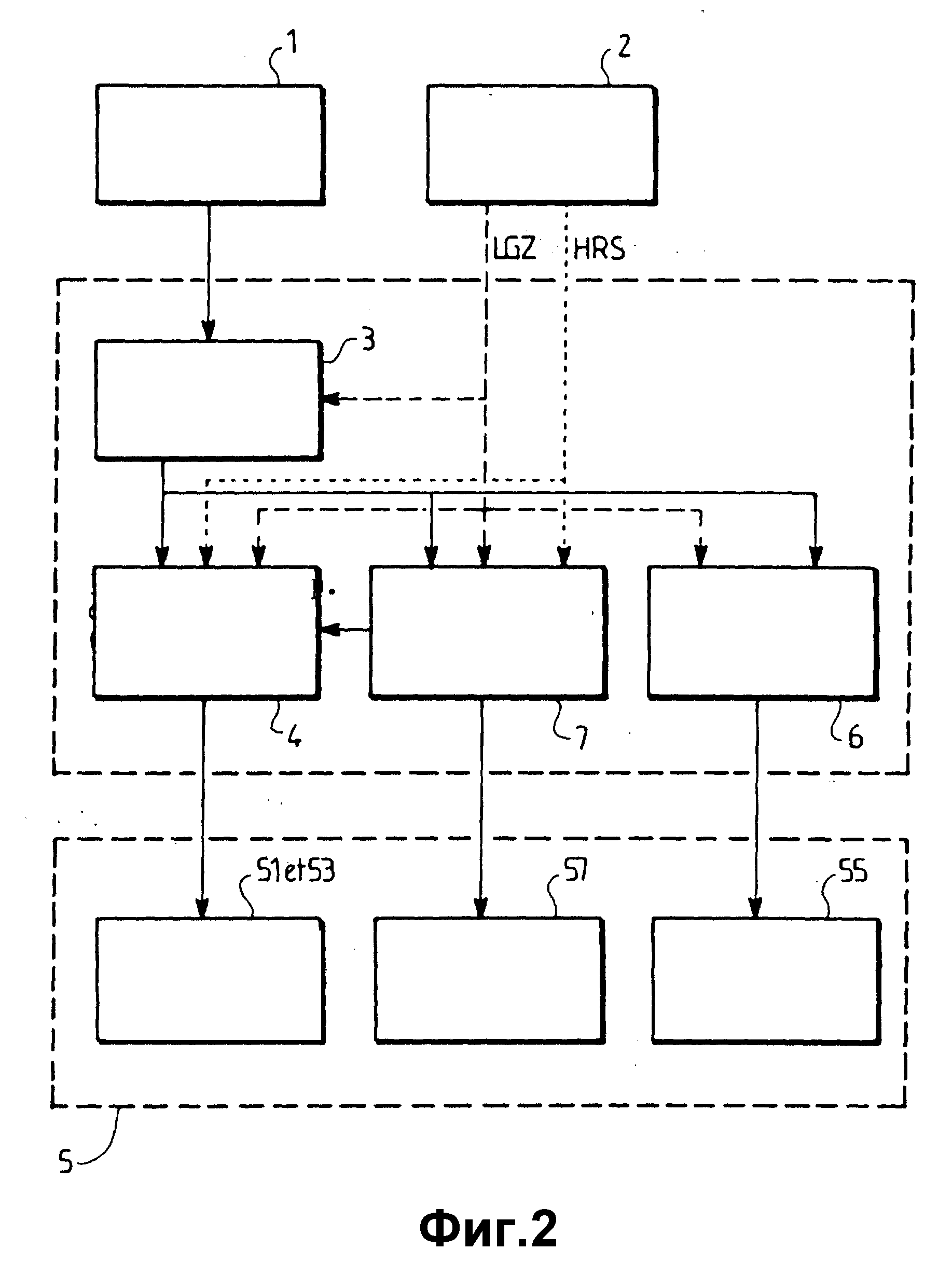
Блок 3 содержит базу данных местности, составленную так, как будет описано дальше. В зависимости от величины L и G обеспечивается доступ к какой-то части этих данных, к так называемой локальной карте, которая хранится в локальном запоминающем устройстве 40 (фиг. 4А).
На основе этой локальной карты и величин L, G, Z, также как и HRS, блок 4 проводит расчеты, предупреждающие столкновение. Желательно, чтобы они сопровождались расчетами, позволяющими избежать этот участок.
В случае риска столкновения раздается сигнал тревоги (51). Главный направляющий прибор 53 может подсказать маневр, позволяющий избежать столкновение. Этим маневром руководит пульт управления.
Локальная карта может быть также использована для составления синтетического изображения (60) благодаря прибору визуальной индикации 55. Она может служить для составления проверочных функций (7) навигации и запоминания информации отклонения (или отличий).
Эти значения отклонений предаются на Землю с блока 79 на блок 10, затем сортируются и используются затем полностью или частично базой данных 30.
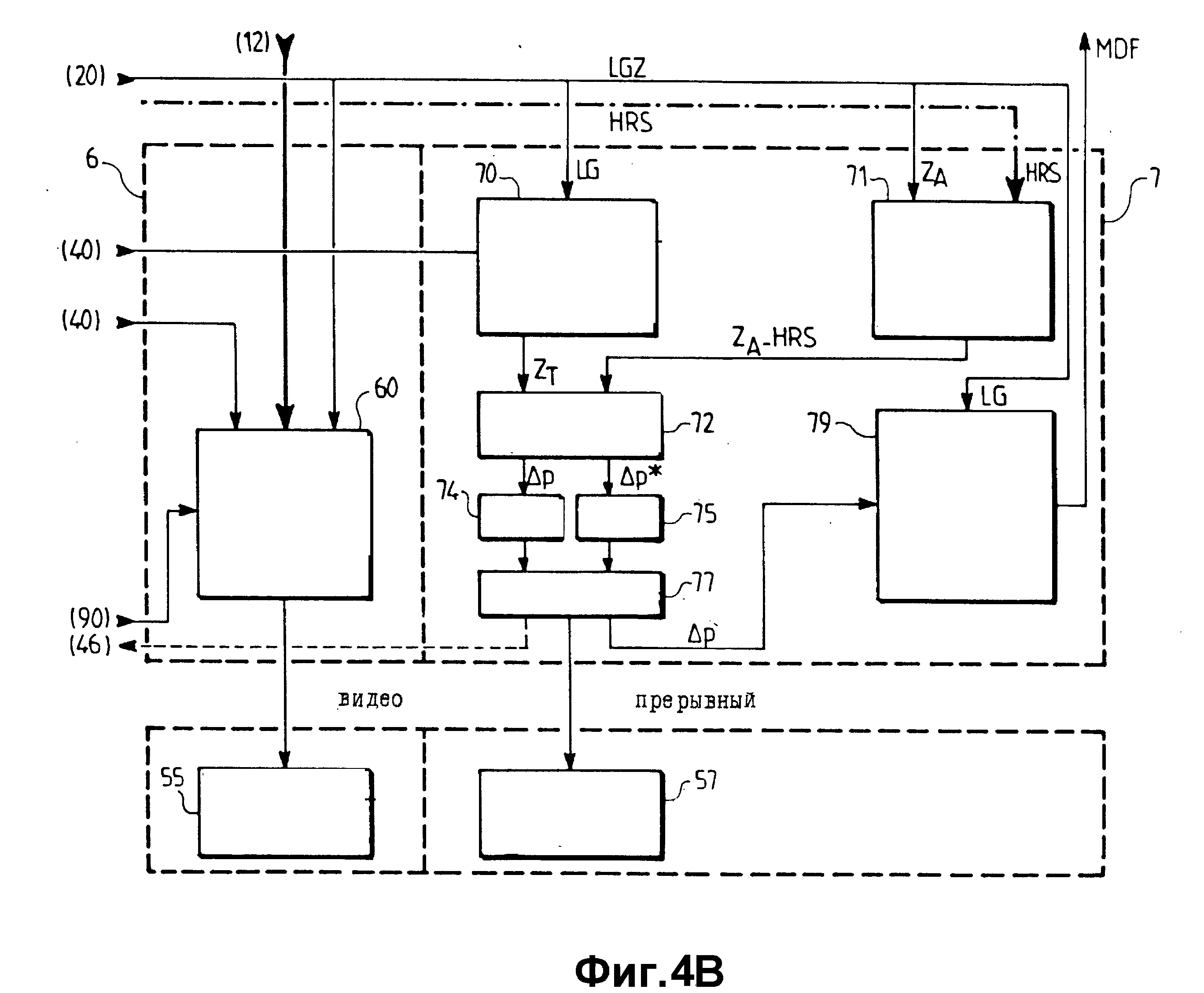
Память 70 запоминает картографический профиль местности, над которой пролетает летательный аппарат, на основе последовательности поступления данных L, G, Z. Память 71 запоминает реальный профиль местности, построенный по значениям высоты HRS. Отклонение между этими двумя профилями определяется на 72.
Более точно (фиг. 4Б), отклонение сравнивается с двумя порогами на 74 и 75 соответственно. Затем оно подвергается анализу (77), после чего включают индикатор соответствия 57, подтверждающий правильное функционирование прибора, воспроизводят сигнал VAL, NAV для проверки расчетов блока 4 и по другим критериям, запоминают информационные данные MDF устройством 79 в соответствии со значениями L и G, для которых они выявлены. Эти данные MDF могут служить, после полета, в качестве основы для эффективной проверки в системе 10 фиг. 4А.
На практике блок анализа 77 проведет корректировку двух входных данных, но с учетом легенды (недавнего прошлого) полета, уверенности, подтвержденной показаниями радиоальтиметра (предельные рабочие значения с учетом расположения самолета, автоконтроль), мимолетного характера преодоления порога; анализа результата (необработанного, опосредованного или другого), возможности адекватной накопленной информации.
Изобретение требует подготовки на Земле, проводимой через определенные интервалы.
Функция обработки (3) блока данных местности осуществляются на борту летательного аппарата. Они обрабатываются массовым запоминающем устройством 30, предназначенным для ввода данных местности BDT. К этому запоминающему устройству 30 присоединяются: контрольный интерфейс 32, прибор управления базой данных 35, а также прибор 37 для декомпрессии данных базы.
На Земле, вне летательного аппарата, информационное устройство 10 обеспечивает запоминание и подачу данных базы 30 через интерфейс 32 на основе информационных данных, полученных из электронного, очень подробного блока данных местности.
Также предусматривается наличие на Земле блока 12, определяющего параметры с целью адаптации данных блока
местности к конкретному летательному аппарату, и затем передает эту информацию:
- на ЭВМ 43, предупреждающую столкновение, для фиксации параметров законов о предупреждении столкновения и при
случае - законов уклонения;
- на прибор визуальной индикации 60 для адаптации визуальной индикации к динамическим характеристикам летательного аппарата.
Блок данных местности, находящейся на Земле, может регулярно контролироваться с помощью обратной информации MDF, функционирующей под надежным контролем.
Так как данные местности, включенные в базу данных 30, находятся в сжатом виде, их использование требует применения функции 37 декомпрессии, которая будет описана ниже.
Со своей стороны блок 35 управления базой данных использует по крайней мере, один показатель, который может храниться в основном запоминающем устройстве 30, чтобы обеспечить идентификацию и быстрый доступ к информации, содержащейся в базе данных BDT.
Пульт управления 90 представляет также информацию, которая обязательно включает определение запаса безопасности по высоте MCZ, передаваемого на блок 43. Сюда добавляется "входная команда о состоянии ввода", указывающая на автоматическое или ручное управление, характер движения летательного аппарата: по прямой или на повороте, характеристики (а именно, полета) летательного аппарата.
Кроме того, пульт управления 90 может определить регулирование синтетического формирования изображения блока 60.
Одной из основ изобретения является тот факт, что заявитель выявил возможность хранения на борту летательного аппарата блока данных местности, способного представить квази-целостность земного блока в пределах контура и решений, который подходят к конкретному летательному аппарату.
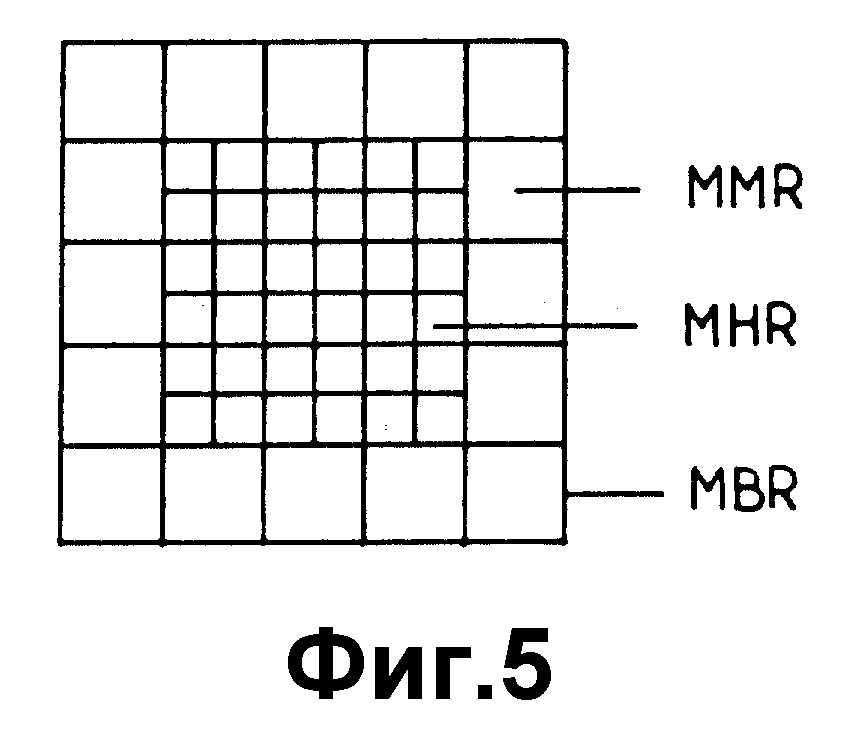
Прежде всего (фиг. 5), записанная информация определяется элементарными базовыми ячейками с низкой разрешающей способностью; они соответствуют всему географическому пространству, отражающему в базе данных.
Так, где находятся аэропорты, или по другим причинам, ячейка MBR может составлять из ячеек средней разрешающей способности MMR, разделяющихся в свою очередь на ячейки высокой разрешающей способности (например, в непосредственной близости от аэропорта) -MHR.
На фиг. 6 показано, что к каждой ячейке, какой бы ни была разрешающая способность, дается числовое значение, представляющее высоту в самой высшей точке, расположенной внутри ячейки (блок данных на Земле составлен более детально).
Другая важная характеристика изобретения заключается в том, что указанные значения высоты не записываются в абсолютной форме (компрессия).
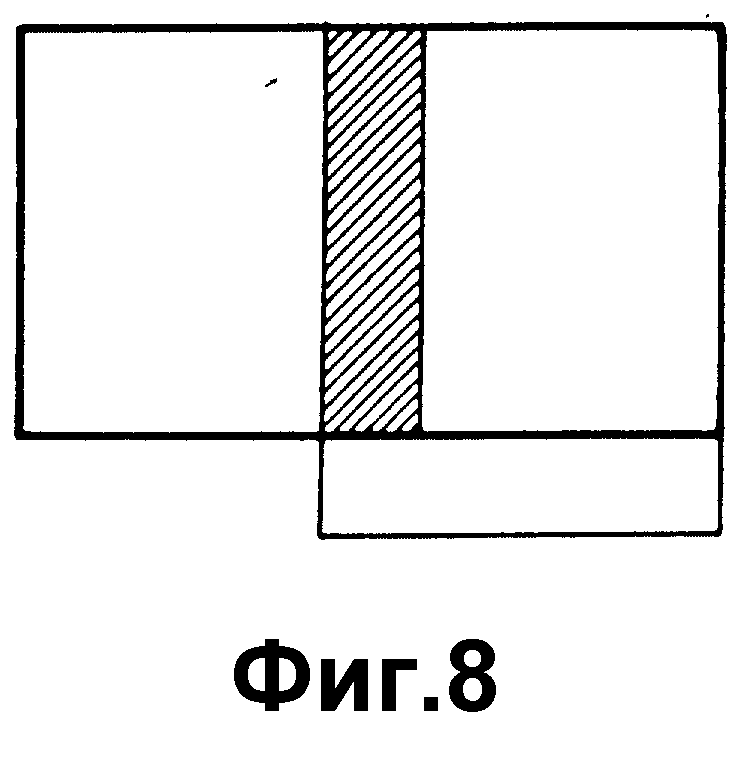
Для объяснения этого факта необходимо обратиться к фигурам 7-9. (Слова "горизонтальный" и "вертикальный" относятся здесь к плоскости рисунка). Главным элементом для определения значений высоты является "панель" на фиг. 7. Панель (обозначенная буквами M и N) представляет собой прямоугольник элементарных ячеек ME x ME. ME, например, - порядка 50. Разделение на панели осуществляется таким образом, что две соседние панели перекрывают друг друга полосой в одну ячейку - вертикально (фиг. 8) и по линии высотой в одну ячейку - горизонтально (фиг. 9).
В соответствии с изобретением (фиг. 7) только высота Z11, представляющая элементарную ячейку, расположенную в нижнем левом углу панели, записывается в абсолютном виде, т.е. со всеми своими значимыми цифрами. Все другие значения высоты внутри панели запоминаются относительным образом (DEL -TAij), т. е. по отношению к ячейке, которая ей предшествует прямо по прямой линии, если эта ячейка присутствует в панели, или по отношению к ячейке, расположенной непосредственно ниже, если значение приходится на крайнюю левую ячейку одной линии.
Замечено, что имеет место резкое увеличение объема информации в результате напуска панелей.
Так, фиг. 10а показывает, как определяется высота ZA элементарной ячейки iA, jA в одной панели с помощью формулы (1) (См. Приложение "формулы" в конце описания).
На фиг. 10б показано, как определить высоту одной и той же точки на панели, расположенной ниже по формуле (II).
С учетом фиг. 10в и формулы (III) можно дополнительно определить высоту одной и той же точки на панели, расположенной справа.
Кроме того, указанный способ компактного воспроизведения информации позволяет осуществлять полный контроль между соседними панелями. Фиг. 11 и формулы (IV) демонстрируют контроль в вертикальном плане между двумя соседними панелями (по линии напуска).
Фиг. 12 и формулы (V) демонстрируют такой же контроль, но для двух соседних панелей в горизонтальной плоскости по линии напуска.
При введении таким образом информации о высоте в запоминающее устройство 30, в большинстве случаев каждая заданная величина может кодироваться на 4-х битах (максимальная).
Кроме того, можно ограничить эту информацию в случае ровных поверхностей, в частности морских пространств большой протяженности, практически не требующих никакого кодирования (на уровне ячейки), необходимости проводить относительное кодирование высоты с точностью (масса бита самая незначительная или LSB), которая зависит от высоты, например, прямо пропорционально; некоторых областей Земного шара, над которыми никогда не пролетают летательные аппараты.
Заявитель пришел к выводу на основании исследований, что возможно интегрировать поверхность Земного шара, т.е. площадь примерно 500 км2 представить ячейками большой численностью, предусмотренными для 1000 аэропортов, в одном запоминающем устройстве; его общее переполнение памяти составило бы 200 Мегабитов, что вполне реально осуществимо на уровне развития современной техники.
По мере введения данных, их дополняют показателями, позволяющими на основании данных, выраженных в географических координатах, быстро отыскать один или несколько блоков, относящихся к зоне, где находится самолет, потом каждую из элементарных соответствующих ячеек и при случае ячейки высшей разрешающей способности, если они есть.
Функции декомпрессии блока 37 заключаются в восстановлении в запоминающем устройстве 40 абсолютных значений высот с помощью формул, указанных выше (целиком или частично в соответствии с нужной степенью контроля) и с учетом вероятной точности кодирования.
Итак, банк данных местности содержит значения высот, взятых с точек местности и соотнесенных в узлах разбивочной сетки в панелях и ячейках, включая способ адресации или доступа к данным, которые опираются на географические координаты: широту (L) и долготу (G).
На уровне полюсов достаточно изменить опорные точки, чтобы прийти к классической ситуации. Такое изменение опорных точек практически эквивалентно изменению полюсов двумя противоположными точками экватора, например.
Это обозначение позволит специалисту сделать перестановку последующих данных, чтобы применить их к случаю с полюсами.
Ниже приводится анализ погрешностей, с одной стороны - на уровне параметров полета, а другой - на уровне банка данных местности.
Погрешность параметров полета зависит от оборудования, установленного на борту летательного аппарата.
Инерционная станция, даже самая совершенная, дает минимальное отклонение, равное 10 км в конце примерно 10-и часового полета. Заявитель предусматривает использовать инерционную станцию высокого качества, точно скорректированную в соответствии с показаниями местонахождения, полученными с прибора, такого как GPS, как описано со ссылкой на фиг. 3. В этих условиях в координаты долготы, широты G, L, полученные таким образом, заложена погрешность, которая является погрешностью, вызываемой материалом GPS, т.е. примерно 100 м и менее.
Банк данных местности также является причиной погрешностей.
Чтобы обработать весь объем погрешностей, заявитель предлагает определить 3 предельных значения погрешностей (фиг. 13): допустимое значение погрешности по широте ML, допустимое значение погрешности по долготе MG и допустимое значение вертикальной погрешности MZ.
Весь объем вытекающих отсюда погрешностей представляет собой элипсоид вращения, полуоси которого a, b, c необязательно равны (фиг. 13).
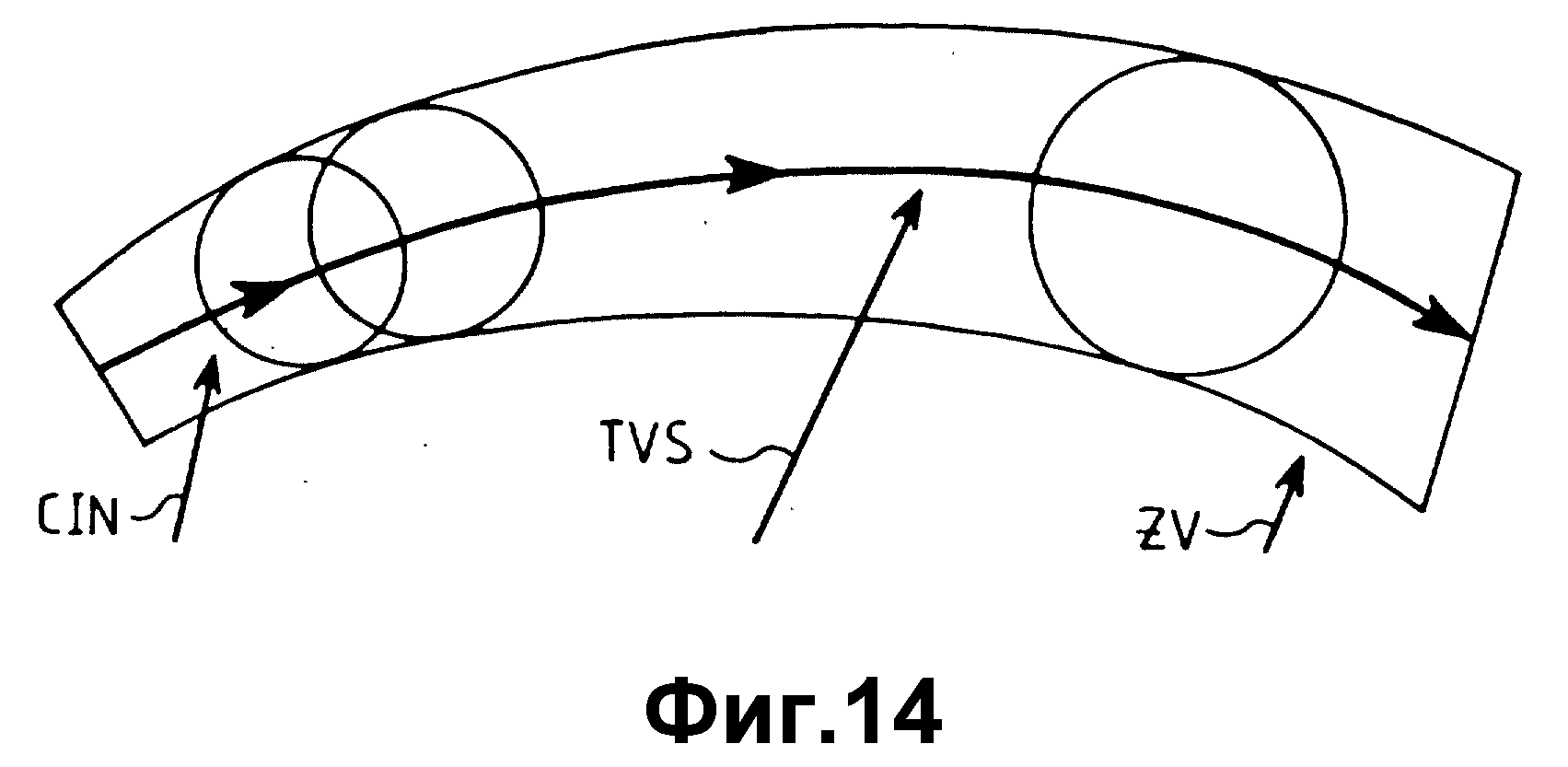
Следовательно, как показано на фиг. 14, каждой точке траектории полета летательного аппарата соответствует какая-то область погрешностей. Для упрощения предполагается, что ML=VG. В вертикальной проекции в горизонтальном плане фиг. 14 получается таким образом круг навигационных погрешностей CIN (обычно это эллипс). Огибающая этих кругов определяет в свою очередь зону полета ZV вокруг траектории полета, рассчитанную п осредством TVS.
Важно отметить, что вертикальный запас MZ представляет собой сумму: регулируемого значения MZC, получаемого с поста пилотирования или блока 4, допустимого значения, связанного с погрешностями параметров полета, определенными выше, допустимого значения, связанного с погрешностями, свойственными значениям высоты, полученным из банка данных местности.
На практике погрешности в двух горизонтальных измерениях (долгота и широта) в конечном итоге выльются в погрешность вертикального допуска: действительно, эти горизонтальные погрешности влекут за собой погрешность на "адресацию" банка данных местности, откуда и появляется погрешность на высоте.
Исходя из этого можно привести расчеты к частоте обновления, равной герцу, которая может быть адаптирована к скорости и функции передачи пилотирования с самолета-носителя.
Частота в один герц подходит к значениям скорости до примерно 275 м/с.
Предполагается, например, что будущая траектория летательного аппарата определяется количеством точек A-F на основании его настоящего местонахождения, как показано на фиг. 15а.
Эта будущая траектория движения рассчитывается на основе текущего местонахождения летательного аппарата (LGZ) и векторов скорости и ускорения, соотнесенными с соответствующими углами, определяющими расположение аппарата. Вектор состояния летательного аппарата (положение и скорость) переносится в трехгранник координат, соотнесенный к Земле, в котором определен банк данных местности (BDT).
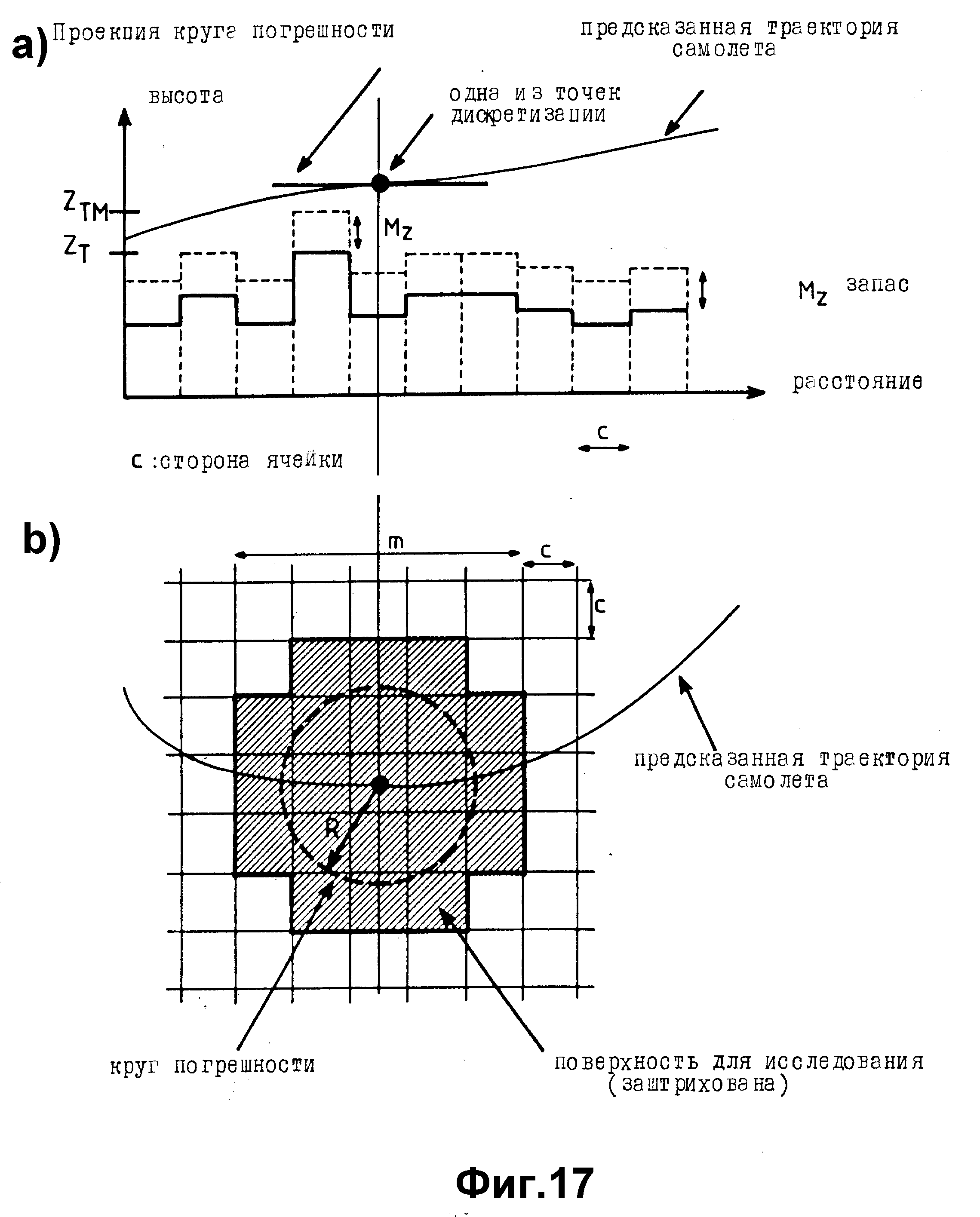
Учитывая область погрешностей, окружающую расчетное положение летательного аппарата (для упрощения считается, что это круг с радиусом
R), и если "с" обозначает ребро ячейки, задействованной в настоящее время (согласно разрешающей способности), число клеток m, по которому определяется высота, рассчитывается следующим образом
m=INT 2 (R SQRT (2)/C+1),
где INT обозначает функцию целого числа, а SQRT(2)- квадратного корня (фиг. 17а и 17б).
В какой-то данной точке "квадратная поверхность" погрешности (составленная из ячеек, огибающих область погрешностей) имеет максимальные размеры, равные mxm ячеек.
Если расчетная траектория имеет "p" точек, следует ввести в локальное запоминающее устройство 40 эту поверхность не менее "p" раз по значениям абсолютных высот.
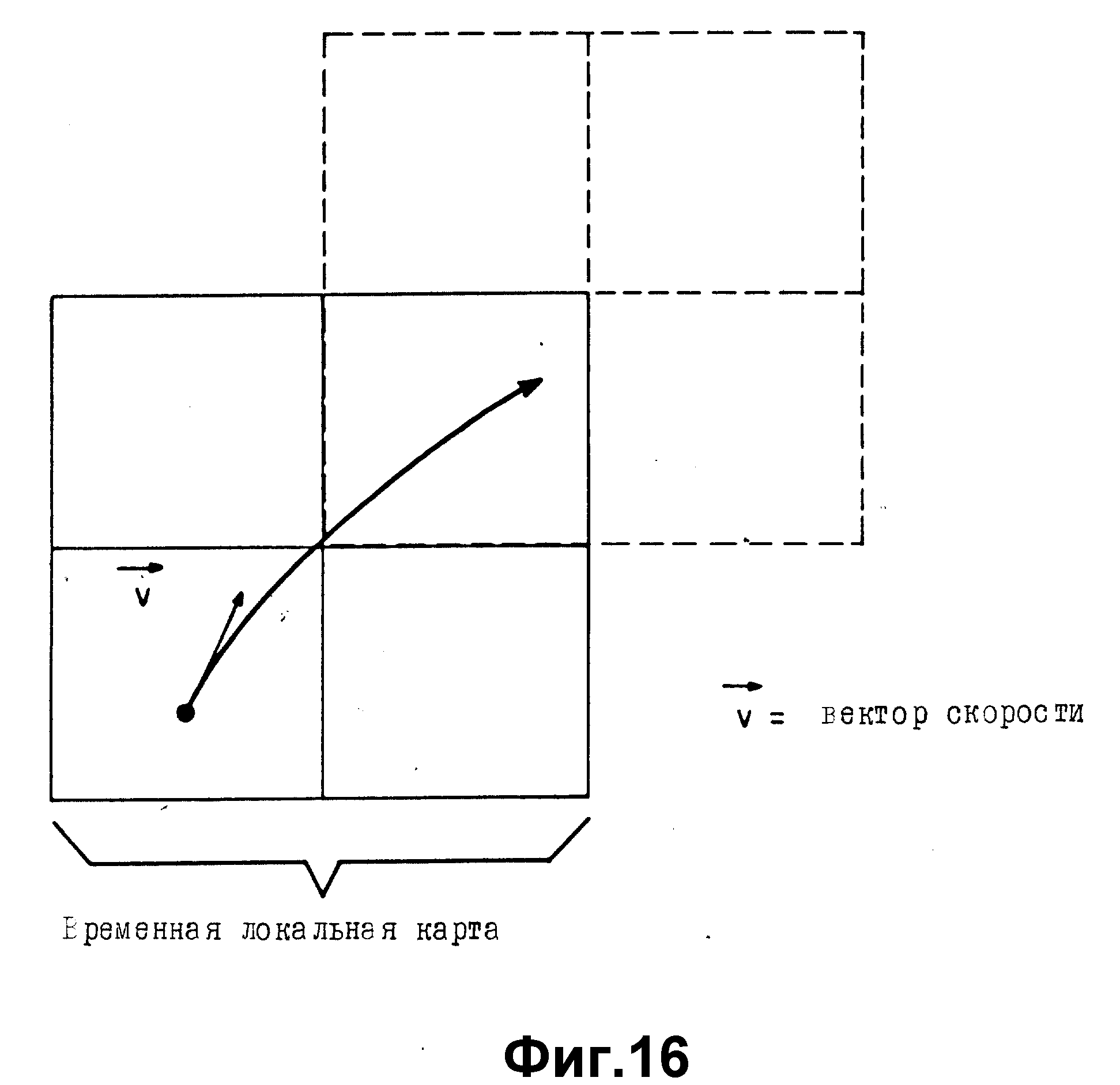
Таким образом, фиг. 16 показывает схематически эволюцию положения самолета по отношению к ячейкам, находящимся в локальном запоминающем устройстве.
Выход информации локального запоминающего устройства может осуществляться путем сохранения области, где находится самолет, и выявления 3-х соседних областей, как показано пунктиром на фиг. 16.
На фиг. 17а и 17б изображена квадратная поверхность погрешностей с максимальными размерами ячеек количеством mxm. Считываются все показания высоты и сохраняется только самое большое значение ZT, которое суммируется с запасом безопасности по высоте MZ, определенным выше. Сумма, обозначенная ZTM показана пунктиром.
Все значения ZTM на карте покажут теоретический профиль под летательным аппаратом, по закону о предупреждении столкновения этот теоретический профиль под летательным аппаратом сравнивается с расчетной траекторией.
Этих мер достаточно в случае автоматического управления, т.к. расчетная траектория известна точно.
При ручном управлении траектория летательного аппарата подвергается более значительным изменениям.
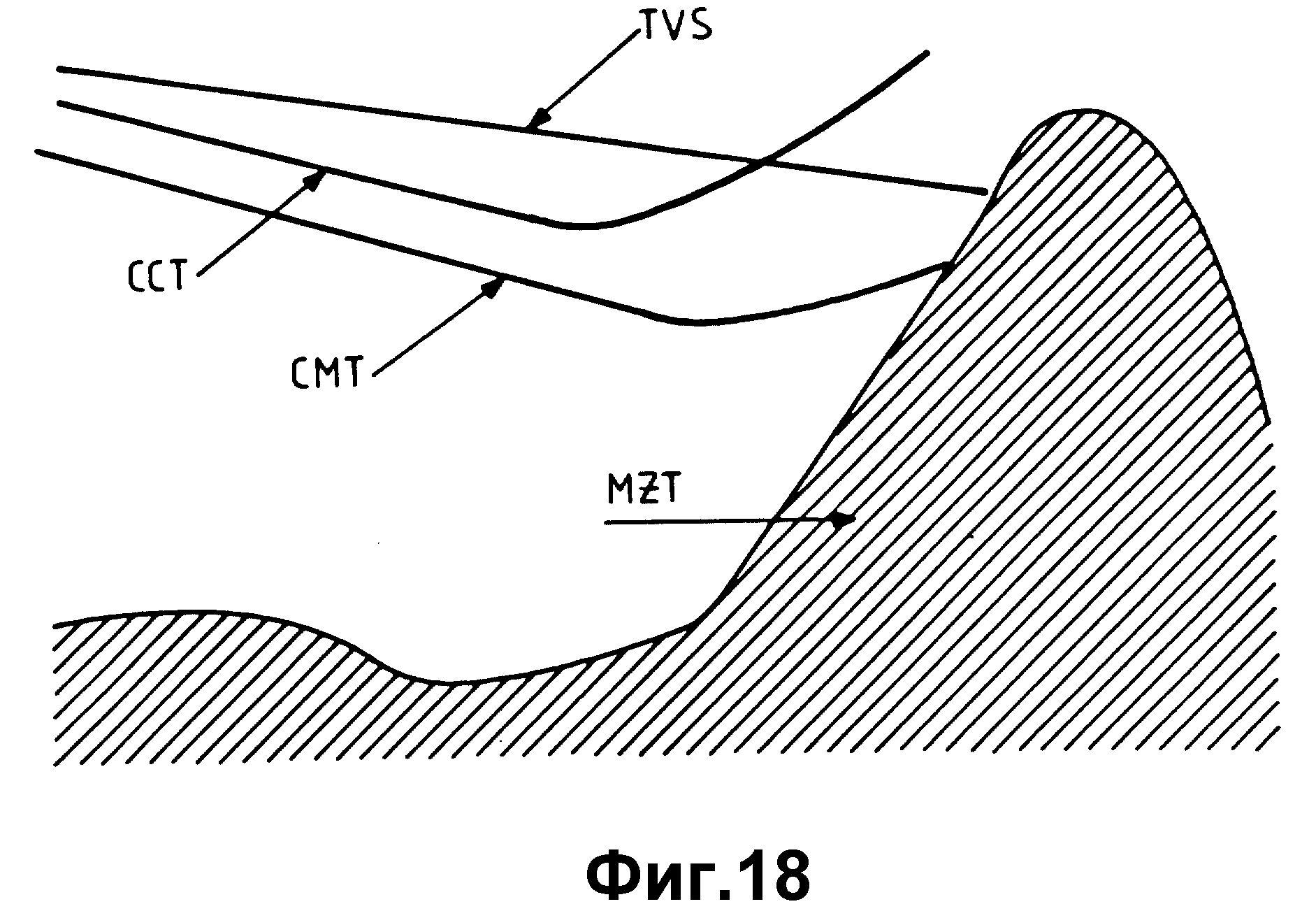
Затем анализ мгновенной и расчетной ситуаций летательного аппарата может отразиться на испытательных кривых, способных вызвать два типа тревоги: предупреждающая тревога, указывающая на опасную конфигурацию в течение среднего промежутка времени, тревога, указывающая на конфигурацию, требующую немедленных действий пилота, т.к. речь идет уже о безопасности полета.
По этому случаю предусматриваются две кривые безопасности летательного аппарата по отношению к местности, определенные по этому же принципу, но с различными параметрами и включающие (фиг. 18) кратковременную кривую ССТ, предназначенную для предупреждения аварии. Как только какая-то точка местности попадает в кривую ССТ или ее верхнюю огибающую, пилот должен вмешаться (тревога); кривая среднего промежутка времени СМТ, предназначенная главным образом для предупреждения пилота о том, что траектория его летательного аппарата встретит преграду, если будет оставаться прежней, и что он должен предпринять маневр избегания этого препятствия (предварительная тревога).
Эти кривые, которые представляют важный элемент системы безопасности, могут быть построены на основании многочисленных статистических и динамических параметров летательного аппарата, в частности функции передачи пилотирования аппаратом, т. е. его способности маневрировать, запаздывания TR0 в результате того, сколько нужно времени пилоту, чтобы отреагировать на сигнал, горизонтальной скорости Vh летательного аппарата, скорости подъема Vz аппарата, фактора допустимой нагрузки n.g., предусмотренной высоты безопасности и бортовой качки летательного аппарата.
На фиг. 19 дается пример отсутствия ложной тревоги. Напротив, случай присутствия тревоги проиллюстрирован на фиг. 20. Слабое отличие между двумя этими фигурами свидетельствует о трудности проблемы, которую решает данное изобретение.
Во-вторых, когда обнаруживается возможное столкновение с Землей, предлагаемый прибор может быть снабжен расчетным устройством одного из законов о предупреждении столкновения, введенного в блок 48 с помощью различных параметров из блоков 43, 46 и 40. Например, в случае тревоги возникает режим вертикального вывода летательного аппарата. В общий чертах режим уклонения от столкновения учитывает конкретно расстояние до опасности, скорость летательного аппарата, его маневренность, время реакции пилота, запасы горючего.
По разным причинам заявитель считает предпочтительным в настоящее время осуществлять простой маневр уклонения от опасности, заключающийся в режиме уклонения в глубину, позволяющем осуществить перелет участка (путем выравнивания самолета в случае необходимости).
Этот режим уклонения может быть выявлен на приборе управления (блок 53) или выработан автоматически.
Следовательно, если для упрощения берется случай траектории в виде прямой линии, предельная кривая уклонения от опасности может быть определена по трем отрезкам (фиг.
21):
- от T0 до T1 , поддержание траектории в неизменном виде в течение времени, равного запаздыванию RTO = T1 - T0;
- от T1 до
T2, переходный период, вызванный изменением радиуса изгиба траектории, переходящий от бесконечности к восходящему радиусу RT;
- от T1 до T3, непосредственно
траектория уклонения, радиус изгиба которой представляет собой прямую зависимость квадрата линейной скорости самолета, разделенной на фактор реальной несущей нагрузки;
RT =
(Vh)2/n.g.
Очевидно, что похожие рассуждения позволяют осуществить маневр уклонения на вираже, но несколько более сложным образом, в детали которого здесь не следует вдаваться.
Примеры способов уклонения описаны во французской заявке на патент N 8617235 на имя заявителя (FR-A-2607948).
В более общем случае известны способы уклонения от столкновения с Землей, где задействованы не только маневры в вертикальной, но и в горизонтальной плоскости. Подобные приборы в настоящее время применяются в некоторых типах скоростных летательных аппаратов и могут быть легко установлены на гражданских летательных аппаратах, если они имеют подходящую для этого мощность, с учетом того, что их проблема намного менее сложная, чем уже исследованная проблема уклонения от столкновения с Землей.
Далее предлагается рассмотреть блок образования синтетического изображения (60, фиг. 2а), которое может быть получено любым приемлемым способом, в частности способом, описанном в Патенте Франции N 8205121 (FR-A-2524117) или же в дополнительном к нему авторском свидетельстве N 8316580 на имя Заявителя.
Функции узлов блока 7 были уже описаны в общих чертах. Указанная функция работает только с предшествующими и настоящими данными (L, G, Z, HRS), за исключением расчетных значений.
Пример кривой высоты местности, представляемой запоминающим устройством 70, проиллюстрирован на фиг. 22а. Со своей стороны на фиг. 22Б показан расчет высоты местности Zta=ZA-HRS в запоминающем устройстве 71.
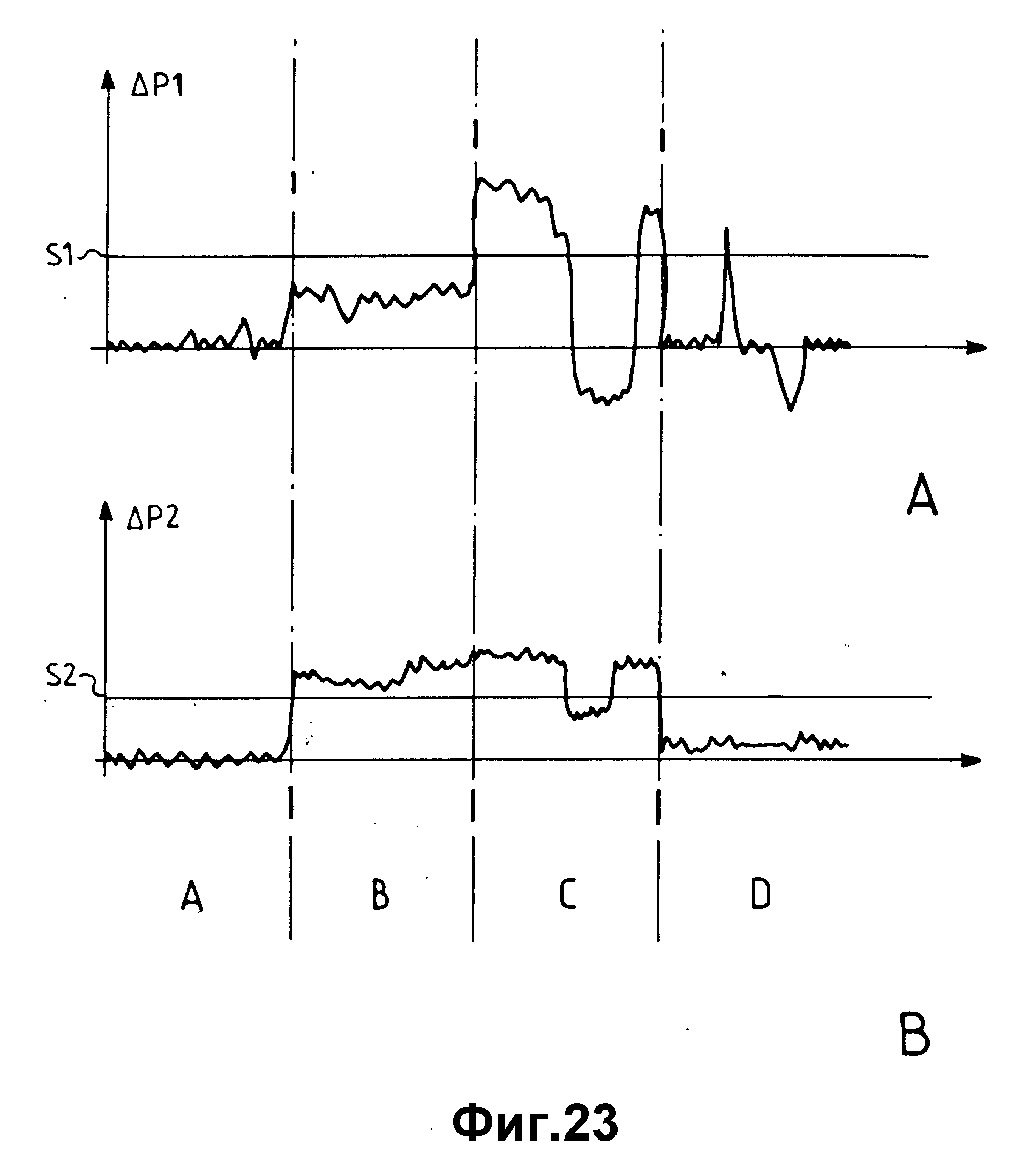
Блок 72 проводит расчет двух отклонений; дельта P1=ZT-ZA+HRS и дельта P2, исправленный и уточненный пример, или же другая соответствующая обработка значения дельта P1.
Эти два отклонения сравниваются соответственно с порогами S1 и S2. На фиг. 23А и 23Б проиллюстрированы два отклонения и их пороги с целью показа 4-х ситуаций или различных случаев от А до Г.
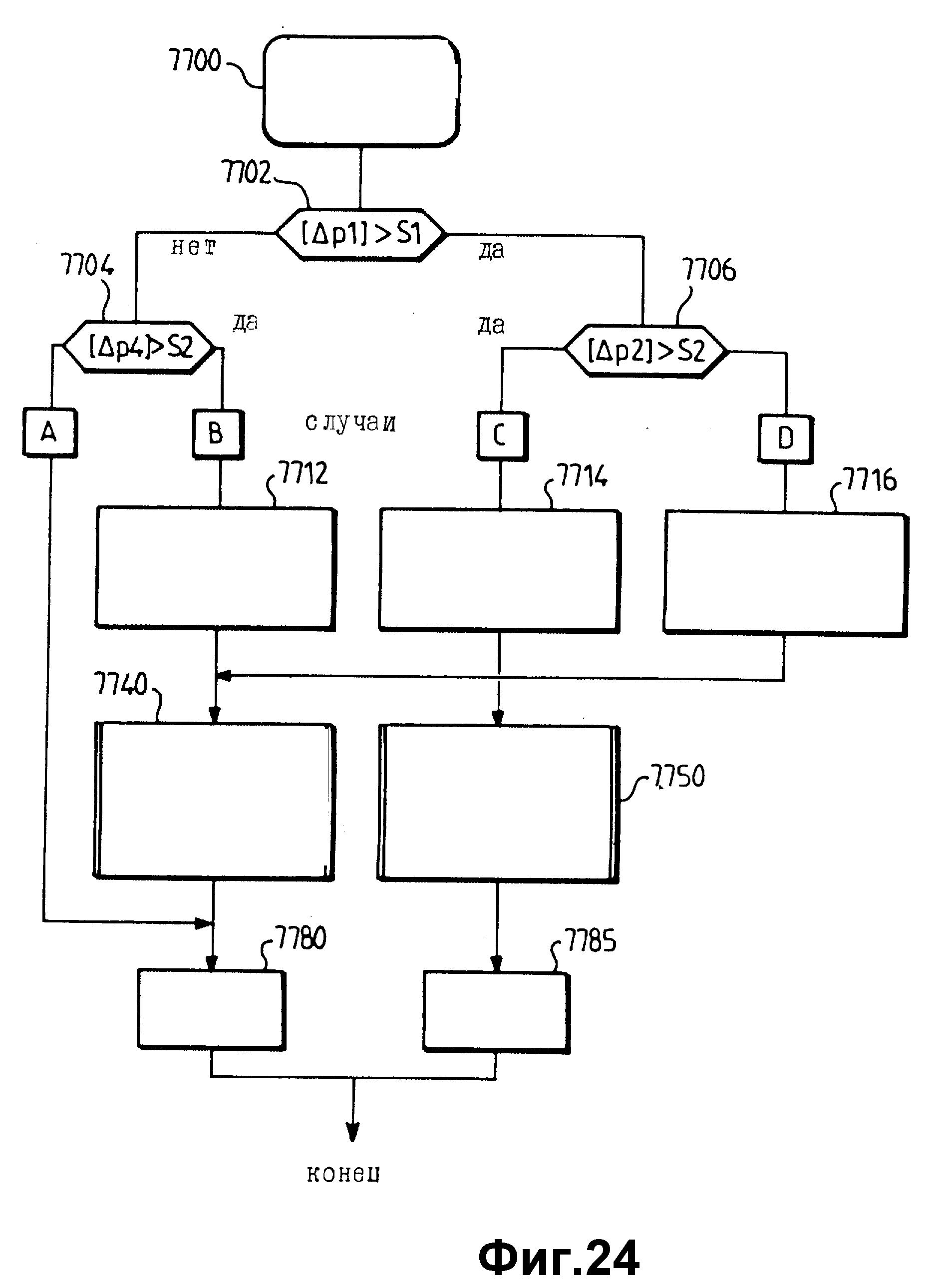
Фиг. 24 демонстрирует упрощенный пример механизма анализа аномальных явлений. Предполагается, что высота радиоволны HRS проверена (с учетом указаний, данных выше).
После этапа взлета 7700 тест 7702 сравнивает абсолютное значение дельта P1 c S1. Затем тест сравнивают абсолютное значение дельта P2 с S2 (отдельный тест на 7704 и 7706 в соответствии с
результатом 7702, для ясности рисунка). В этом случае получают:
- случай А (нормальный), если дельта P1≤S1 и дельта P2≤S2, от этого переходят прямо на 7780 с действительным
сигналом VAL, NAV;
- случай Б, если дельта P1≥S1 и дельта P2 > S2. Высота Z смещена. Этап 7712 исследует, связано ли смещение с ZA (проблема, выявляемая на бортовых приборах)
или с ZT (систематический сбой блока данных местности BDT). В любом случае этап 7740 заносит в запоминающее устройство 79 величины L, G и дельта P1(при случае и результат этапа 7712) в течение всей
продолжительности аномалии. Тем не менее продолжают на 7780 с действительным сигналом VAL. NAV;
- случай В, если дельта P1 > S1 и дельта P2 > S2. Аномалия происходит в принципе
в ходе запроса блока данных BDT, т.е. или из-за его адресации (данные L и/или G, содержащие ошибки), или же из-за его содержимого. Анализ легенды позволит нормально разрешить эту проблему (7714) в
соответствии с повторяемостью аномалии. В этом случае этап 7750 записывает в память величины L, G (при случае результат этапа 7714) по крайней мере в начале аномалии. Продолжают с этапа 7785 с ложным
сигналом VAL. NAV;
- случай Г, если дельта P1 > S1, а дельта P2 ≤S2. Изучая возможность явной ошибки блока данных местности, этап 7716 может проверить, идет ли речь о точной
аномалии, или о точной дисфункции одного из приборов на борту (радиоальтиметр, GPS, инерционная станция), или о преодолении препятствия, которое еще не обозначено. Здесь же этап 7740 заносит в
запоминающее устройство 79 величины L, G и дельта P1 (при случае результат этапа 7716) - все это в течение всего периода аномалии. Можно продолжить на 7780 с действительным сигналом VAL. NAV.
Что касается использования "легенду" к аномалиям на этапах 7712-7716, на одном из примеров будет показано преимущество этого подхода. Может показаться также, что характеристики местности, над которой пролетает самолет, в частности ее ровный характер (взятый из замеров ZA-HRS) позволяет четко уточнить классификацию аномальных явлений.
В данном примере переходят от
случая А со значением дельта P1, близким к 0, к случаю В, в котором значение дельта P1 имеет очень большое отклонение. Возможные случаи аномалии анализируются следующим образом:
- если
переход от А к В сопровождается переходом от ровного участка к гористому участку, речь идет наверняка об ошибке в навигационных параметрах,
- в других случаях речь идет об ошибке в блоке
данных местности BDT, где будет выявлено 3 профиля рисунка: местность остается ровной; переход от одного неровного
участка к другому, но с упором на высоту при переходе; переход от неровного
участка к ровному.
Подобный анализ может быть проведен с другими видами переходов в случаях А-Г.
Изобретение может иметь многочисленные варианты исполнения.
Например, при непосредственной близости к Земле предлагаемый прибор может находится в стадии торможения, по крайней мере в отношении сигналов тревоги, Это может быть в случае когда летательный аппарат приземляется по приборам (ILS) или по срочной просьбе пилота.
Целесообразно, чтобы торможение являлось динамичным (уже названный сигнал VAL. NAV).
Может также представить интерес использование двух блоков данных 30: одного - для рельефа, фиксированного по времени (естественный альтиметр), другого - для возведенных и/или строящихся препятствий (искусственный альтиметр).
Реферат
Применяется в качестве вспомогательного средства в воздушной навигации в авиации. Основное запоминающее устройство содержит базу данных, представляющую значительную часть Земного шара, поделенную на ячейки с множеством уровней и более точных в соседних с аэропортами зонах. Данные о текущем состоянии полета летательного аппарата получают на основе двух горизонтальных составляющих координат, высоты и векторов скорости и ускорения. Учитываются также сигналы управления, поступающие с пульта управления. На основе двух горизонтальных составляющих координат положения летательного аппарата передают в быстродействующее запоминающее устройство временную локальную карту, на основе которой определяется огибающая по высота участка в зоне полета. Средства обработки, предупреждающие столкновение, позволяют включить сигнал тревоги, если отношение между зоной безопасности и огибающей по высоте удовлетворяет условию, определенному с помощью сигналов управления, в результате чего повышается безопасность полета. 2 с. и 28 з.п.ф-лы, 24 ил.
Комментарии