Способ монтирования компонентов ветроэнергетической установки - RU2718396C1
Код документа: RU2718396C1
Чертежи


Описание
Настоящее изобретение касается способа монтирования компонентов ветроэнергетической установки.
Обычно ветроэнергетическая установка имеет несколько компонентов (лопасти ветроколеса, гондола, генератор, башня и пр.), которые должны подниматься посредством крана, чтобы можно было соответственно монтировать эти компоненты. Башня ветроэнергетической установки состоит, например, из нескольких сегментов башни, которые размещены друг на друге. Эти сегменты башни могут быть изготовлены из стали или бетона. Возведение или, соответственно, сооружение ветроэнергетической установки очень сильно зависит от имеющихся погодных условий, таких как, например, температура, скорость ветра и условия видимости.
В приоритетной заявке к настоящей заявке Немецкое ведомство по патентам и торговым маркам произвело исследование следующих документов: US 2015/0 028 609 A1, EP 2 424 811 B1, DE 10 2007 059 820 A1.
Задачей настоящего изобретения является предусмотреть способ монтирования компонентов ветроэнергетической установки, который сделает возможным сооружение ветроэнергетической установки даже в плохих погодных условиях.
Эта задача решается с помощью способа монтирования ветроэнергетической установки по п.1 формулы изобретения.
При этом предусматривается способ монтирования компонентов ветроэнергетической установки, которая имеет несколько компонентов. По меньшей мере один из компонентов монтируется посредством крана. Информация о положении и/или удаленности монтируемого компонента регистрируется посредством лазерного сканирующего устройства. CAD-данные монтируемого компонента используются для точного определения положения и/или удаленности монтируемого компонента. Зарегистрированная информация о положении и/или удаленности и CAD-данные сравниваются или, соответственно, корректируются, и эти данные выдаются крановщику. Управление краном может осуществляться на базе зарегистрированной информации о положении и/или удаленности монтируемого компонента.
По одному из аспектов настоящего изобретения ориентация монтируемого компонента может регистрироваться посредством лазерного сканирующего устройства и выдаваться крановщику дополнительно к информации о положении и/или удаленности.
По одному из аспектов настоящего изобретения лазерное сканирующее устройство выполнено в виде лазерного 2D-сканера, и предусматривается камера, при этом лазерный 2D-сканер вместе с камерой регистрирует информацию о положении и/или удаленности.
По одному из аспектов изобретения для реализации этого способа лазерный 3D-сканер может быть применим с камерой или без.
Изобретение касается также применения кинематического наземного лазерного сканера для регистрации информации о положении и/или удаленности компонентов крана ветроэнергетической установки, причем эти компоненты при монтаже поднимаются посредством крана. Зарегистрированная информация о положении и/или удаленности передается крановщику крана.
Изобретение касается мысли о регистрации монтируемых компонентов ветроэнергетической установки (напр., башня, лопасти ветроколеса, гондолы, кок, генератор и пр.) посредством лазерного сканирования, напр., при монтаже этих компонентов, чтобы получать обратную связь о положении и/или ориентации этих компонентов. Посредством лазерного сканирования может определяться расстояние между лазерным сканером и монтируемым компонентом.
CAD-данные монтируемых компонентов могут сохраняться в памяти. По зарегистрированной посредством лазерного сканера удаленности от лазерного сканера, а также сохраненным в памяти CAD-данным может осуществляться точное определение положения монтируемых компонентов. Причем это точное определение положения является динамическим, так что может определяться точное положение монтируемых компонентов при поднятии компонентов посредством крана. Эта информация о положении может, например, предоставляться крановщику, чтобы он мог соответственно управлять краном, чтобы сделать возможным точное позиционирование монтируемых компонентов.
Лазерный сканер может, например, обеспечивать возможность кинематического наземного лазерного сканирования k-TLS. Посредством лазерного сканирования (мобильное измерение или стационарное измерение) посредством лазерного 3D-сканера или синхронизированного 1D- или 2D-сканера, имеющего камеру, может обеспечиваться возможность точного нахождения расстояний и расположений монтируемых компонентов.
CAD-модели или планы или данные монтируемых компонентов могут предоставляться заранее. Альтернативно этому CAD-данные могут находиться способом лазерного сканирования на заводе или на стройплощадке.
В соответствии с изобретением собственно известный способ лазерного сканирования (например, кинематическое наземное лазерное сканирование) применяется для определения положения и/или расположения монтируемых компонентов во время сооружения ветроэнергетической установки. В частности, может находиться ориентация монтируемого компонента относительно крана.
Так как при сооружении ветроэнергетической установки посредством лазерного сканирования всегда известно, где находится монтируемый компонент, и как он ориентирован, крановщику больше не нужен зрительный контакт с монтируемым компонентом. При этом сооружение ветроэнергетической установки может также осуществляться в условиях плохой видимости, например, при тумане или ночью. При этом может значительно уменьшаться время, которое требуется для сооружения ветроэнергетической установки.
По одному из аспектов настоящего изобретения может применяться одно только лазерное сканирование или с дополнительной камерой для составления CAD-моделей или для нахождения расстояний, относительного положения и угловых положений между монтируемыми или, соответственно, уже смонтированными компонентами ветроэнергетической установки.
По одному из аспектов настоящего изобретения кинематическое наземное лазерное сканирование k-TLS может применяться для геодезического мониторинга, благодаря чему могут регистрироваться быстрые движения и деформация объектов измерения. Далее, может применяться мобильная картография для регистрации геометрической информации об окружающей среде с движущейся платформы.
В соответствии с изобретением лазерный сканер может быть предусмотрен на полу или на кране. Лазер может опционально эксплуатироваться в 3D-режиме. Альтернативно этому лазерный сканер может эксплуатироваться в 1D- или 2D-режиме в комбинации с камерой. Лазерный сканер и камера могут размещаться на полу или на монтажном кране.
В соответствии с изобретением могут уменьшаться периоды маневров крана, так как становится возможным монтаж также при ухудшении видимости или, соответственно, ночью.
По одному из аспектов настоящего изобретения с помощью лазерного сканера при необходимости с применением имеющихся CAD-данных монтируемых компонентов может определяться относительное положение монтируемого компонента и сканера, угловое положение монтируемого компонента.
В соответствии с изобретением монтируемый компонент может регистрироваться посредством лазерного сканирования, так что может составляться CAD-модель. Альтернативно этому могут применяться конструкционные данные компонентов ветроэнергетической установки.
Опционально CAD-модель может составляться на основании размеров монтируемого компонента, зарегистрированных, например, с помощью лазерного сканера на месте.
На основании ранее найденных CAD-данных и данных измерения лазерного сканера может определяться относительное положение, а также угловое положение монтируемого компонента во время монтажа. Посредством этих данных возможно более точное управление краном, так что могут соответственно монтироваться монтируемые компоненты.
Другие варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
Преимущества и примеры осуществления изобретения поясняются подробнее ниже со ссылкой на чертеж.
Фиг.1: показано схематичное изображение ветроэнергетической установки;
фиг.2: показано схематичное изображение окружения ветроэнергетической установки при монтаже ветроэнергетической установки;
фиг.3: показано схематичное изображение ветроэнергетической установки при монтаже лопасти ветроколеса; и
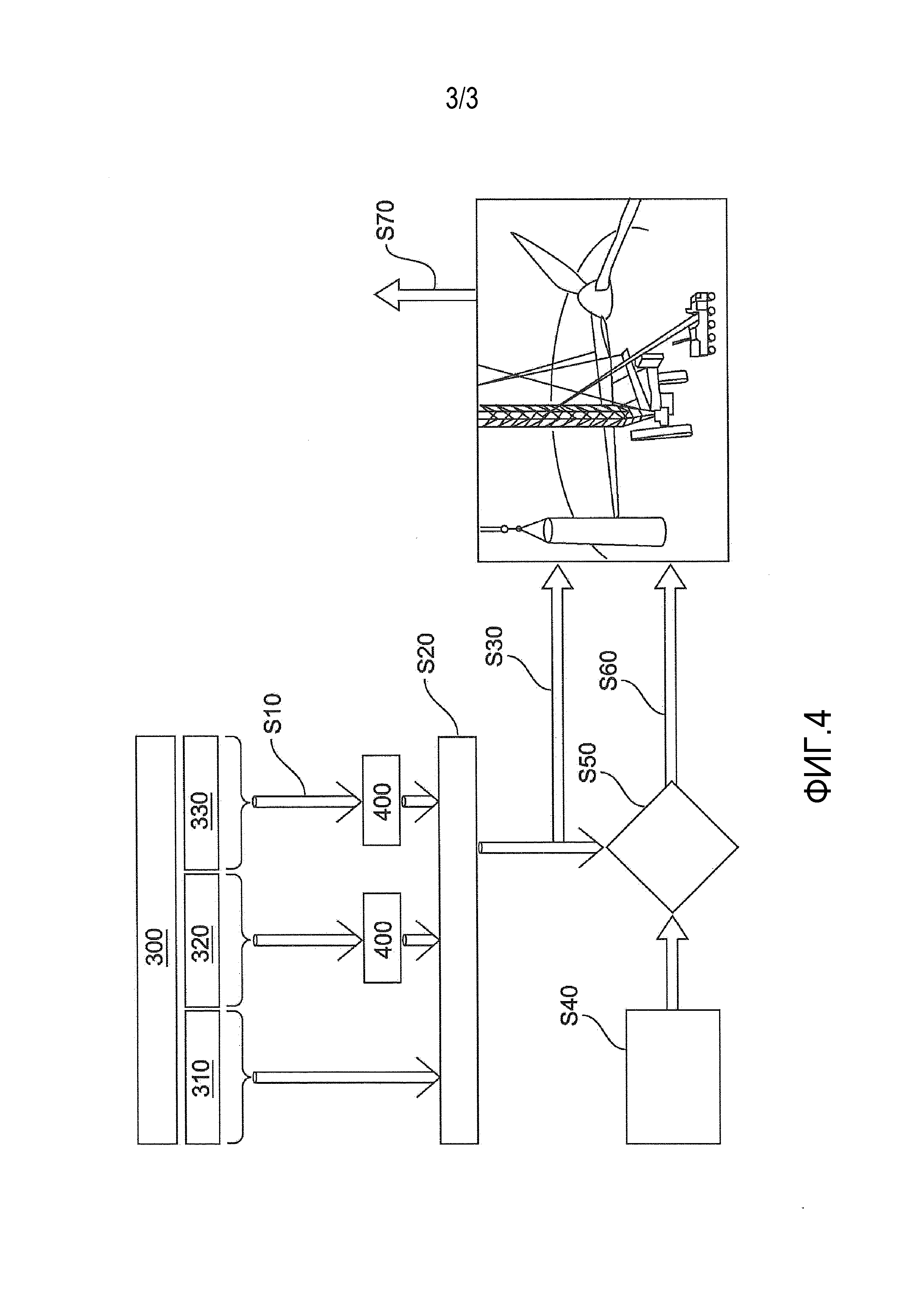
фиг.4: показано схематичное наглядное пояснение предлагаемого изобретением способа монтирования компонентов ветроэнергетической установки.
На фиг.1 показано схематичное изображение ветроэнергетической установки. На фиг.1 показана ветроэнергетическая установка 100, имеющая башню 102 и гондолу 104. На гондоле 104 расположено аэродинамическое ветроколесо 106, имеющее три лопасти 108 ветроколеса и кок 110. Аэродинамическое ветроколесо 106 при эксплуатации приводится ветром во вращательное движение и при этом осуществляет привод генератора в гондоле 104 для выработки электрической энергии.
На фиг.2 показано схематичное изображение башни ветроэнергетической установки, например, с фиг.1, во время монтажа. Башня 102 имеет несколько сегментов 102a башни, которые размещаются друг на друге. Сегменты 102a башни могут подниматься посредством крана 200 с земли вверх и размещаться на верхнем сегменте 102a башни. Во время этого монтажа сегмента 102a башни лазерное сканирующее устройство 300 регистрирует монтируемый сегмент 102a башни. Посредством лазерного сканирующего устройства 300, которое, например, выполнено в виде кинематического наземного лазерного сканирующего устройства, регистрируется положение или, соответственно, расстояние между монтируемым сегментом 102a башни и лазерным сканирующим устройством 300. Эта информация о положении или удаленности может передаваться лазерным сканирующим устройством 300 устройству 220 управления крана 200. Альтернативно этому эта информация о положении и удаленности может передаваться крановщику крана. Тогда крановщик или, соответственно, устройство 220 управления может соответственно влиять на положение сегмента 102a башни для точного размещения его на других сегментах 102a башни.
Лазерный сканер 300 и камера 400 могут контролировать монтируемые части 102a и основание, на котором должны монтироваться части.
На фиг.3 показано схематичное изображение ветроэнергетической установки при монтаже лопасти ветроколеса. Лопасть 108 ветроколеса посредством кранового крюка 210 и крана 200 перемещается вверх, так чтобы лопасть 108 ветроколеса могла крепиться на гондоле 104 или, соответственно, на коке 110. Во время монтажа лопасти 108 ветроколеса лазерное сканирующее устройство 300 контролирует положение лопасти ветроколеса или, соответственно, расстояние до лазерного сканирующего устройства 300. Далее, посредством лазерного сканирующего устройства 300 может регистрироваться ориентация лопасти 108 ветроколеса вместе с положением. Эта информация о положении и удаленности может выдаваться устройству 220 управления крана. Альтернативно или дополнительно к этому эта информация может выдаваться крановщику. Например, эта информация может представляться на устройстве 230 отображения крана.
Лазерный сканер 300 и камера 400 могут контролировать монтируемые части 108 (лопасть) и основание 110 (ступицу), на котором должны монтироваться части.
По одному из аспектов настоящего изобретения лазерное сканирующее устройство 300 (или другое устройство) может иметь CAD-данные монтируемых элементов ветроэнергетической установки или, соответственно, обращаться к ним. Лазерное сканирующее устройство 300 может сравнивать эти CAD-данные с зарегистрированной им информацией о положении монтируемых конструктивных элементов, чтобы делать возможным точный монтаж монтируемых частей. С помощью лазерного сканирования, которое, например, применяется в виде кинематического наземного лазерного сканирования k-TLS, информация о положении может находиться даже в условиях плохой видимости. Поэтому предлагаемое изобретением применение лазерного сканирующего устройства допускает монтаж элементов ветроэнергетической установки даже в условиях плохой видимости, например, при тумане или в темноте.
Посредством лазерного сканирующего устройства 300 крановщик может, например, давать обратную связь о текущем положении и/или ориентации монтируемого конструктивного элемента даже в условиях плохой видимости. При этом сооружение ветроэнергетической установки может существенно ускоряться.
По одному из аспектов настоящего изобретения лазерное сканирующее устройство 300 может применяться для регистрации CAD-данных монтируемых компонентов на стройплощадке.
По одному из аспектов настоящего изобретения опционально дополнительно к лазерному сканирующему устройству 300 может быть предусмотрена камера 400.
При применении кинематического наземного лазерного сканирующего устройства могут регистрироваться быстрые движения и деформации монтируемых конструктивных элементов.
В соответствии с изобретением лазерное сканирующее устройство 300 может быть предусмотрено на земле, на кране или в другом месте на стройплощадке (напр., на автомобиле или грузовике). Устройство сканирует не только монтируемый конструктивный элемент, но и основание, на котором монтируется этот конструктивный элемент. Лазер может, например, эксплуатироваться в 3D-режиме. Альтернативно этому лазерный сканер может эксплуатироваться в 1D- или 2D-режиме в сочетании с камерой 400 для получения информации о положении применительно к монтируемым конструктивным элементам.
На фиг.4 показано наглядное пояснение предлагаемого изобретением способа монтирования компонентов ветроэнергетической установки. Лазерное сканирующее устройство 300 может эксплуатироваться в 3D-режиме 310, 2D-режиме 320 или 1D-режиме 330, или, соответственно, быть выполнено в виде лазерного 3D-, 2D- или 1D-сканера. В шаге S10 активируется лазерное сканирующее устройство 300. Когда лазерное сканирующее устройство 300 активировано в 2D-режиме 320, то камера 400 тоже может активироваться. Когда лазерное сканирующее устройство 300 активировано в 1D-режиме 330, то камера 400 тоже может активироваться. В шаге S20 на базе результатов измерений лазерного сканирующего устройства 300 в шаге S10 составляется CAD-модель или, соответственно, происходит обращение к существующей CAD-модели и/или выполняется измерение расстояния. В шаге S30 осуществляется нахождение координат регистрируемого конструктивного элемента и определение расстояний. Эта информация может затем в шаге S70, например, выдаваться крановщику.
В шаге S40 может предоставляться CAD-модель или, соответственно, может осуществляться обращение к CAD-модели. CAD-модель может касаться всей ветроэнергетической установки или компонентов ветроэнергетической установки. В шаге S50 осуществляется корректировка данных CAD-модели, а также зарегистрированных координат и/или расстояний до регистрируемого элемента. В шаге S60 на базе сравнения модели в шаге S50 находятся координаты и/или расстояния до лазерного сканирующего устройства 300 и, например, в шаге S70 выдаются крановщику. При этом монтаж или, соответственно, сооружение ветроэнергетической установки могут значительно улучшаться, так как компоненты ветроэнергетической установки могут монтироваться даже в условиях плохой видимости, например, тумане, темноте и пр.
Реферат
Изобретение относится к способ монтирования компонентов ветроэнергетической установки (100). Способ монтирования компонентов ветроэнергетической установки (100), в котором ветроэнергетическая установка (100) имеет множество компонентов, включает в себя следующие шаги: монтирование по меньшей мере одного компонента посредством крана (200); регистрация информации о положении и/или удаленности и регистрация ориентации монтируемого компонента посредством лазерного сканирующего устройства (300); сравнение CAD-данных монтируемого компонента с зарегистрированной информацией о положении и/или удаленности и зарегистрированной ориентации для точного определения положения и/или удаленности монтируемого компонента; выдача зарегистрированной информации о положении и/или удаленности крановщику; управление краном (200) на базе зарегистрированной информации о положении и/или удаленности и ориентации монтируемого компонента. Изобретение направлено на сооружение ветроэнергетической установки даже в плохих погодных условиях. 2 н. и 5 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Обследование лопастей винта
Лопасть ротора ветроэнергетической установки и способ для монтажа лопасти ротора ветроэнергетической установки
Комментарии