Обследование лопастей винта - RU2571070C2
Код документа: RU2571070C2
Чертежи
Описание
Данное изобретение относится к способу обследования ветроэнергетической установки, в частности, обследования лопастей винта ветроэнергетической установки, а также к соответствующему устройству для обследования.
В частности данное изобретение относится к обследованию ветроэнергетической установки с горизонтальной осью, с башней и гондолой с винтом и ступицей ротора с несколькими лопастями винта, как изображено на фиг. 3.
На сегодняшний день лопасти винта ветроэнергетической установки могут иметь длину до 60 м, и при этом подвержены воздействию переменных ветровых нагрузок, а иногда даже шторма. При этом появляются значительные нагрузки и, в частности, лопасти винта, которые изготовлены целиком или частично из волокнистого композиционного материала такого как, например, стекловолокнистые материалы, могут повреждаться, в частности, посредством таких перегрузок. Такие повреждения являются заметными при образовании трещин. Важно заблаговременно обнаруживать такие образования трещин или другие признаки повреждений для того чтобы предотвращать большие повреждения, за счет замены лопастей винта или если возможно ремонта.
По этой причине могут быть целесообразными регулярные осмотры лопастей винта на возможные признаки повреждений. Такие осмотры называются также обследованиями. В принципе такие обследования могут выполняться на других элементах ветроэнергетической установки, как, например, на башне или гондоле. Для обследования лопастей винта часто происходит так, что ветроэнергетическую установку останавливают, и поверхности лопастей винта осматриваются при помощи аппаратов, таких как высотные подъемники, рабочие платформы или спусковые устройства. Такие осмотры требуют большой затраты времени и связанны с большими расходами, а при описанных высотных работах существует к тому же риск, а именно риск высотных работ, для обслуживающих сотрудников, которые проводят эти осмотры, а именно обследования.
В качестве уровня техники в этом разделе обращается внимание, в общем, на следующие документы: DE 10 2006 032 387 A1, DE 103 23 139 A1, DE 10 2008 053 928 A1, DE 10 2009 009 272 А1, а также WO 2010/051 278 А1.
В основе данного изобретения лежит задача по устранению или сокращению минимум одной из выше описанных проблем. В частности, должен предлагаться вариант для усовершенствованного обследования ветроэнергетической установки, в частности, ее лопастей винта, который является менее затратным, чем предшествующие решения и по возможности снижает рабочий риск обслуживающего персонала, который проводит такое обследование, по меньшей мере должно быть предложено альтернативное решение.
В соответствии с изобретением предлагается способ согласно пункту 1 формулы изобретения. Такой способ пригоден для того, чтобы оптически обследовать ветроэнергетическую установку или часть от нее, в частности, одну лопасть винта или несколько лопастей друг за другом, а именно чтобы оптически осмотреть на возможные повреждения или образования повреждений или намеки на повреждения. В соответствии с этим используется камера, которая является, в частности, цифровой камерой высокого разрешения. Также учитываются так называемые веб-камеры или специальные камеры. Предпочтительно предлагаются фотокамеры, однако могут также использоваться кинокамеры. Такая камера направляется на обследуемую область, следовательно, на область ветроэнергетической установки, в частности, на область лопасти винта. Камерой производится съемка фотографии этой области. Снятая таким образом фотография может анализироваться на месте или позднее и/или может архивироваться. Теперь на основании фотографии возможно оптическое обследование обследуемой области. В частности при помощи такой фотографии может обнаруживаться образование трещин или обследуемая область может осматриваться на образование трещин. Вместо фотографии мог бы также сниматься эпизод фильма.
Для обследуемой области или обследованной области, то есть для сфотографированной области, регистрируется к тому же положение на лопасти винта, и сопоставляется со сфотографированной областью и тем самым с обследованной в определенный момент областью. Для того чтобы полностью обследовать лопасть винта, или другую область ветроэнергетической установки, нужно повторять описанный процесс последовательно для всех осматриваемых областей соответствующей части, так, например, лопасти винта. При этом для каждой обследованной и тем самым сфотографированной области регистрируется и сопоставляется каждый раз положение, так что может проводиться также документирование результата обследования для лопасти винта.
Предпочтительно камера оснащена телескопической оптикой, в частности телескопом, а для проведения съемки фотографии обследуемой области эта область оптически увеличивается, для того чтобы получать вследствие этого фотографию наиболее возможного высокого разрешения.
Посредством использования телескопической оптики, в частности, в связи с цифровой камерой высокого разрешения возможно высококачественное оптическое обследование соответствующей области с земли, так что на лопасти винта или другой области ветроэнергетической установки можно избежать проведения высотной работы, то есть работы при помощи подъемных платформ, площадок, спусковых устройств или тому подобного.
Предпочтительно обследуется лопасть винта так называемой ветроэнергетической установки с горизонтальной осью, которая имеет основание лопасти винта и конец лопасти винта. Основание лопасти винта - это часть лопасти винта, которая закреплена на ступице ротора, а конец лопасти винта - это обращенная от ступицы часть лопасти винта.
При этом лопасть винта и камера предпочтительно выравниваются по отношению к друг другу таким образом, что между камерой и основанием лопасти винта с одной стороны и камерой и концом лопасти винта с другой стороны устанавливается одинаковое расстояние, и/или что продольная ось лопасти винта, то есть ось, проходящая от основания лопасти винта к концу лопасти винта, устанавливается перпендикулярно к оптической оси, а именно оптической оси, которая соединяет камеру со средней областью лопасти винта. Если камера находится на достаточно большом расстоянии до лопасти винта, в принципе расстояние от камеры до каждой области лопасти винта более или менее постоянно, что может быть по большей части уже в том случае, если камера находится на земле поблизости от ветроэнергетической установки. Предпочтительно камеру, по меньшей мере штатив камеры, нужно располагать на земле для того чтобы избежать упомянутой высотной работы. Упомянутое расположение лопасти винта по отношению к камере может производиться, например, так, что ветроэнергетическая установка выключается таким образом, что лопасть винта останавливается в соответствующем желаемом положении по отношению к камере. В зависимости от места на земле в области ветроэнергетической установки, а также посредством соответствующего размещения камеры может производиться описанное выравнивание между лопастью винта и камерой.
Для регистрации положения сфотографированной области регистрируют по меньшей мере угол выравнивания камеры и/или телескопической оптики по отношению к опорному выравниванию.
При этом способ может включать в себя следующие этапы:
- регистрации по меньшей мере размера в продольном направлении обследуемой части от первой опорной точки до второй опорной точки части,
- определения по меньшей мере первого опорного угла, который указывает угол выравнивания для первой опорной точки,
- определения по меньшей мере второго опорного угла, который указывает угол выравнивания для второй опорной точки,
- определения текущего угла выравнивания, который указывает угол выравнивания для обследуемой на данный момент области, и
- выявление текущего положения обследуемой на данный момент области, по меньшей мере, по отношению к продольному направлению части, из текущего угла выравнивания, опорных углов и опционально из размера в продольном направлении и/или
- сохранение текущего угла выравнивания и/или выявленного текущего положения в таблице вместе с данными проведенного обследования, в частности вместе со снятой фотографией и/или идентификационным кодом снятой фотографии.
Согласно варианту осуществления предлагается, что для выявления положения сфотографированной области используется проекционное устройство с проекционным экраном. Это проекционное устройство сконструировано таким образом, что посредством выравнивания камеры проецируется на проекционный экран соответствующее обследованной области положение. Выравнивание камеры происходит здесь вследствие того, что камера как таковая или минимум часть от нее перемещается для выравнивания с обследуемой областью и после выравнивания принимает соответствующее выровненное положение. Это выровненное положение проецируется на проекционный экран проекционного устройства.
Предпочтительно проекция производится при помощи средства освещения на камере. Этим средством освещения может быть, например, лазерный указатель или тому подобное. В частности, используется как можно меньше рассеивающий источник света, так что для каждого выравнивания камеры световая точка или, по меньшей мере, световое пятно отмечает на проекционном экране положение, которое соответствует обследуемой в определенный момент или обследованной области.
Другими словами проекционное устройство сконструировано таким образом, что при непрерывном сканировании силуэта лопасти винта - это разъяснено здесь только для иллюстрации - на проекционном экране получается особенно уменьшенное отображение, если отображалось бы соответствующее движение световой точки или светового пятна средства освещения. Посредством жесткого соединения средства освещения с выравниваемой камерой каждое выравнивание может легко отмечаться и документироваться на проекционном экране. Проекционный экран может быть, например, листом доски для презентаций (флипчарта), и каждое положение наносится в таком случае вручную на этот флипчарт в соответствии с появляющейся в определенный момент световой точкой или световым пятном. Также в качестве проекционного экрана может быть предусмотрен измерительный приемник, который автоматически регистрирует соответствующее положение. При автоматизированной регистрации учитывается также другое определение выравнивания камеры, как, например, посредством датчика угловой скорости. Однако предпочтительное использование надписываемого вручную проекционного экрана является простым, требующим меньших затрат и целесообразным.
Для того чтобы можно было сопоставлять нанесенные в каждом случае на проекционный экран положения обследованной области с положениями на лопасти винта, лопасть винта может уменьшено наноситься на проекционный экран, например, ее силуэтом или объединенными угловыми точками. К тому же для ориентации принимаются во внимание, в частности, положение конца лопасти винта и области основания, в частности, конкретно фланца для закрепления на ступице ротора. Для этого камера может быть направлена на конец лопасти винта и затем на фланец лопасти винта, причем каждый раз наносится соответствующая точка на проекционном экране. На основании, по крайней мере, этих обеих угловых точек затем возможно масштабирование с использованием сведений о размере лопасти винта, в частности о длине лопасти винта.
Предпочтительно предлагается предусматривать масштабирование лопасти винта на эластичной ленте, например, на резиновой ленте. Если на лопасти винта нанесено масштабирование известной лопасти винта, эластичная лента должна растягиваться только лишь таким образом, что она соединит только что нанесенную точку конца лопасти винта с нанесенной точкой фланца лопасти винта. При этом масштабирование на эластичной ленте соразмерно растягивается и должно затем только лишь переноситься на проекционный экран. Таким же образом может производиться - в том случае, если это необходимо - также масштабирование в поперечном направлении лопасти винта.
В соответствии с изобретением предлагается к тому же обследующее устройство согласно пункту 10 формулы изобретения. Это обследующее устройство подготовлено для того, чтобы оптически обследовать лопасть винта ветроэнергетической установки. В принципе учитывается вместе с этим также обследование других элементов, таких как башни или гондолы ветроэнергетической установки.
Обследующее устройство имеет камеру для съемки в определенный момент фотографии обследуемой области лопасти винта. С камерой соединено выравнивающее устройство для выравнивания камеры с обследуемой областью. В частности для этого может использоваться регулируемый штатив, то есть штатив с фиксируемой или устанавливаемой механикой движения для камеры. Кроме того, обследующее устройство имеет устройство регистрации положения, которое подготовлено для того, чтобы регистрировать соответствующее положение обследуемой области или обследованной области.
Предпочтительно камеру снабжают телескопической оптикой, в частности, телескопом, для того чтобы оптически увеличивать обследуемую область, в частности, для возможности проведения съемки увеличенной фотографии обследуемой в определенный момент области. Особенно предпочтительно вместе с такой телескопической оптикой используется фотокамера высокого разрешения.
Согласно варианту осуществления устройство регистрации положения сконструировано в виде проекционного устройства с проекционным экраном. Предпочтительно камера соединена со средством освещения, в частности, лазерным указателем, для того чтобы создавать световое пятно на проекционном экране в положении, которое соответствует положению обследуемой области на лопасти винта.
Дополнительный вариант осуществления предлагает предусматривать обрабатывающее данные устройство для сопоставления соответствующей фотографии обследуемой в определенной момент области с зарегистрированным положением обследуемой области и опционально для записывания фотографии с сопоставленным положением или ее идентификационными данными. Предпочтительно это обрабатывающее данные устройство подготовлено для того, чтобы записывать в память фотографию вместе с сопоставленным положением. Таким образом, предлагается более высокая автоматизация, которая делает возможным оптическое обследование лопасти винта с последующей документацией, причем документация может быть полностью или частично получена из обрабатывающего данные устройства. Этим экономится время, и уменьшается количество источников ошибок.
Удобно, если выравнивающее устройство имеет по меньшей мере электронное управление и снабженный двигателем привод для автоматизированного выравнивания камеры, и/или что выравнивающее устройство соединено с соответствующим обрабатывающим данные устройством, для обеспечения возможности управления посредством обрабатывающего данные устройства. Это предусматривает оптическое обследование простым способом. Таким образом, возможно последовательно сканировать обследуемые области лопасти винта, в частности, все поверхностные области лопасти винта, каждый раз снимать одну или для надежности несколько фотографий для каждой области, которые документируются и архивируются. Даже если не нашлось трещины или другого признака повреждения лопасти винта, такая документация может служить для более позднего доказательства. Благодаря обследованию лопасти винта или другой части ветроэнергетической установки, благодаря обследующему устройству, в частности, с земли может предусматриваться соответствующая техника автоматизации для обследующего устройства.
Предпочтительно такое автоматизированное выравнивающее устройство соединено с обрабатывающим данные устройством, для того, чтобы становиться управляемым посредством обрабатывающего данные устройства. Следовательно, проведение и архивирование обследования и при необходимости также оценка результатов обследования могут проводиться автоматизировано. Таким образом, соответствующую экономию времени и улучшение воспроизводимости можно назвать в качестве преимуществ. Предпочтительно обрабатывающее данные устройство имеет обрабатывающее изображения программное обеспечение, которое может анализировать или, по меньшей мере, предварительно оценивать каждое изображение на образование трещин или другие известные признаки повреждений.
Наконец для повышенной автоматизации и предотвращения требующих больших затрат высотных работ можно назвать в качестве последующего преимущества также аспект безопасности. А именно, если очень сильное упрощение обследования достижимо, то обследование может проводиться также просто на более коротких расстояниях, вследствие чего может гарантироваться повышенная безопасность. Если происходит автоматизированное обследование лопасти винта, необходимы также значительно более короткие времена простоя ветроэнергетической установки во время обследования.
Таким образом, предлагается способ и устройство для оптического обследования частей ветроэнергетической установки, в частности областей лопасти винта. Этим должны достигаться, в частности, экономия расходов и времени при обследовании лопастей винта, а также минимизация рисков высотной работы.
Кроме того достижима оптимизация производственного планирования сервиса лопасти винта, то есть сервиса при проведении обычных обследований лопасти винта. К тому же возможно или, по меньшей мере, облегчается массовое обследование, может происходить улучшение производственного планирования технических обслуживаний лопасти винта, например, таким образом, что обследование происходит в соответствующий момент времени на соответствующей установке. К тому же для ориентированного на состояние технического обслуживания имеются благоприятные условия. За счет быстрого обследования лопастей винта и при этом короткого времени простоя, возрастает также у пользователя ветроэнергетических установок признание такого обследования и связанного с ним простоя.
Предложенное обследование или обследующее устройство имеет своей целью, в частности, обследование с земли. Как правило, является применимым стандартный телескоп, который пригоден для наземных наблюдений. Такие современные телескопы имеют преимущества, так как они требуют меньших затрат, являются переносными и отчасти точно управляемыми, а именно как вручную, так и через компьютер. Последующие преимущества - это то, что известная техника фотокамер может адаптироваться, например, веб-камера или высококачественная техника фотокамер. В принципе учитывается также использование специальных камер для тепловых изображений или инфракрасных съемок. Предпочтительно используется камера высокого разрешения, которая, однако, может быть ограничена в комбинации с телескопом. Кроме того, может применяться программное обеспечение для подготовки и управления. Для специальных применений как, например, конкретной настройки на форму обследуемой лопасти винта, в используемых системах возможны открытые интерфейсы для настроек для специальных применений.
Возможность выполнения обследования происходит посредством телескопа марки "Meade с типовым наименованием LX90, как, например, на интернет-сайте http://www.meade.com/1x90/index.html. При этом речь идет о 8-дюймовом аппарате, который имеет в своем распоряжении GPS и компас и выравнивается при помощи двигателя.
Выравнивание этого телескопа для астрономических наблюдений происходит абсолютно автоматически при помощи GPS и компаса. В наземном режиме, который может применяться для обследования, телескоп позиционируется и управляется вручную посредством дистанционного управления. Однако здесь также может происходить настройка предпочтительно через предусмотренные интерфейсы, а автоматизация может предусматриваться для повторяющихся испытаний.
В основном чисто вручную производимое обследование является осуществимым при помощи телескопа, то есть исключительно посредством взгляда чрез телескоп. Однако, как правило, для фотодокументации предлагается предусматривать высококачественную 20-и мегапиксельную камеру типа Canon EOS5D или стандартную веб-камеру как, например, 2-мегапиксельную камеру Logitech или стандартную небольшую цифровую камеру как, например, 5-мегапиксельный Canon Powershot А460. Также другие камеры могут использоваться и настраиваться на соответствующий телескоп, как, например, камера предприятия "The Imaging Source.
На месте упомянутого 8-дюймового аппарата предлагается использование 10-дюймового или 12-дюймового аппарата.
Конструкция обследующего устройства, а также выравнивание и ориентирование лопасти винта описывается в последующем на конкретном примере.
Используется телескоп, который монтируется на стабильном штативе. В качестве варианта осуществления предлагается предусматривать оборудование, то есть в частности телескоп на транспортном средстве, при котором телескоп может оставаться полностью на транспортном средстве. Для этого для транспортного средства применяется рама, которая может спускаться по полу транспортного средства. При этом телескоп стоит на раме, которая может спускаться, так что телескоп имеет в таком случае прочное положение на земле, тем не менее, он находится в транспортном средстве, по меньшей мере, частично в транспортном средстве. Таким образом, может сокращаться подготовительно-заключительное время на сборку и разборку телескопа. В принципе можно перемещаться на транспортном средстве до желаемого места, соответствующая дверь транспортного средства может открываться, и обследование может начинаться. Посредством спуска рамы по полу транспортного средства получается разъединение транспортного средства и телескопа. Таким образом, может существенно улучшаться качество изображений или может достигаться высокое качество, так как для этого обеспечена, в частности, наиболее устойчивая конструкция. Альтернативно или дополнительно, могут применяться стабилизирующие системы для стабилизации изображения, что предлагается в качестве варианта осуществления. Для выравнивания телескоп может настраиваться вручную или с компьютерным управлением посредством дистанционного управления. Камера может монтироваться над окуляром телескопа.
Лопасть винта позиционируется таким образом, что по длине лопасти достигается почти одинаковое расстояние между лопастью винта и телескопом или камерой. Измерение расстояния может производиться, например, так называемым дальномером.
При этом сначала определяется расстояние между телескопом и расширением лопасти или нижней стороной гондолы. Затем это расстояние должно устанавливаться также между концом лопасти винта, то есть верхушкой и телескопом. Для этого винт сначала может шататься, то есть в принципе вращаться посредством ветра, но без усилия, для того чтобы затем останавливаться, а также останавливать осматриваемую лопасть винта в желательном месте посредством приведения в действие аварийного выключателя в шкафу управления ветроэнергетической установки в соответствующий момент времени.
Наиболее постоянное расстояние между телескопом и лопастью винта или другим осматриваемым конструктивным элементом по всей длине лопасти винта или длине конструктивного элемента является причиной того, что нужно немного или вовсе не нужно дополнительно фокусироваться. При необходимости фокусировка может быть достаточной для обследования всей лопасти винта. Если лопасть винта не выровнена этим желаемым способом, оптическое обследование все-таки может проводиться, что приведет, тем не менее, к более высоким расходам по фокусировке.
Для ориентации на лопасти винта на телескопе или камере установлен лазерный указатель, который проецирует точку на флипчарт позади телескопа. Для ориентации на лопасти винта телескоп направляется на верхушку, а положение верхушки отмечается на флипчарт. В случае ветроэнергетической установки Enercon Е82 это соответствует радиусу в 41 м. В качестве следующего наводят на область основания или хвостовика лопасти, что в принципе совпадает также с фланцем лопасти винта для крепления на ступице ротора. Для примера в ветроэнергетической установке Enercon Е82 это соответствует радиусу в 3,1 м. Эта точка также отмечается на флипчарте, а остальные радиусы между этими обеими точками можно легко определить.
Радиусы, например, расстояния в метрах, либо рассчитываются и отмечаются на флипчарте, либо используется эластичная лента, в частности резиновая лента, на которой отмечена координатная сетка для ветроэнергетической установки, то есть в вышеупомянутом примере для лопасти винта ветроэнергетической установки Enercon Е82. Расстояние между телескопом и лопастью винта может варьироваться от установки к установке, а также может легко варьироваться расстояние между телескопом и флипчартом, то есть проекционным экраном. Посредством растягивания эластичной ленты и вместе с ней нанесенной на нее координатной сетки опорные размеры могут переноситься простым способом на флипчарт. Альтернативно, например, опорный размер, то есть масштабирование может размещаться, то есть отмечаться на флипчарте при помощи складной линейки, а соответствующие радиусы могут быть рассчитаны. Кроме того, существует возможность проводить ориентацию посредством угловых данных или угловых сообщений телескопа и геометрических соотношений.
Предпочтительно предлагается предусматривать на лопасти винта опорные метки, которые считывает и обрабатывает соответствующая система как обрабатывающее данные устройство, которое соединено с обследующим устройством, в частности, камерой. Таким образом, может проводиться или улучшаться ориентация на лопасти винта.
Согласно варианту осуществления изобретения предлагается способ, который отличается тем, что для регистрации положения сфотографированной области регистрируется минимум один угол выравнивания камеры или использованной телескопической оптики по отношению к опорному выравниванию. Посредством регистрации такого угла возможно определение положения сфотографированной в определенный момент и этим обследованной области. К тому же может регистрироваться угол в направлении, например, в продольном направлении обследованной части, для того, чтобы регистрировать положение относительно этого направления на детали. Опционально может дополнительно записываться минимум один последующий угол, в частности, в поперечном направлении к упомянутому продольному направлению или поперечно к другому первому направлению, для обеспечения возможности определять обследованную область также в двух направлениях, для того, чтобы посредством этого каждый раз также определять положение в двух координатах на поверхности. Лежащие в основе варианты разъясняются в последующем, в частности, для регистрации одного угла в направлении, что, однако по смыслу можно также применять без затруднений в использовании минимум двух углов.
Исходя из зарегистрированного угла посредством известных связей фактическому месту на обследуемой части могут быть присвоены координаты либо размеры. Другими словами, значения углов могут пересчитываться в соответствующие значения длин. Альтернативно значения углов могут сохраняться без перерасчета просто в качестве опорных значений. Угол выравнивания относится к опорному выравниванию, которое может устанавливаться произвольно. Возможность установить опорное выравнивание означает сопоставить с ним характерную точку на обследуемой части, как, например, в середине или на краю обследуемой части.
Предпочтительно предлагается регистрировать минимум один размер в продольном направлении обследуемой части от первой опорной точки ко второй опорной точке этой части. Например, обследуемой частью может быть лопасть винта, и первая опорная точка может находиться на основании лопасти винта, а вторая опорная точка находится на конце лопасти винта. Регистрация размера в продольном направлении, также в примере регистрации длины лопасти винта, может происходить также вследствие того, что соответствующее значение уже известно или берется из технического паспорта оборудования.
Кроме того, записываются первый опорный угол и второй опорный угол. Они относятся соответственно к углу выравнивания камеры или телескопической оптики на первую или вторую опорную точку. В указанном примере первый опорный угол указывает, таким образом, угол при выравнивании на основание лопасти винта, а второй опорный угол указывает угол выравнивания при выравнивании на конец лопасти винта. Вследствие этого угол разницы между первым и вторым углом выравнивания также известен или может рассчитываться простым способом. Впрочем, с таким углом разницы может быть сопоставлен размер, то есть длина лопасти винта упомянутого примера.
Кроме того, записывается каждый раз текущий угол выравнивания камеры или телескопической оптики на обследованную в текущий момент область. Текущим углом выравнивания является, таким образом, тот угол, который устанавливается, если фотокамера или телескопическая оптика направлена на обследуемую в определенный момент область. Снятой при этом фотографии соответствующей области может сопоставляться этот текущий угол выравнивания. Предпочтительно он сохраняется в таблице вместе с фотографией или с идентификационным кодом, таким как опорный номер снятой фотографии.
Альтернативно или дополнительно, по текущему углу выравнивания, принимая во внимание оба опорных угла и размер, может определяться текущее положение. Это может происходить, например, посредством интерполяции.
Если, например, лопасть винта длиной 50 м для обследования выравнивается перпендикулярно к направлению взгляда от обследующего устройства и первый опорный угол, а именно угол для основания лопасти винта, составляет 5 градусов, а второй опорный угол, а именно угол для конца лопасти винта, составляет -5 градусов, то каждому градусу в первом приближении нужно сопоставлять размер в 5 м. Таким образом, если, например, текущий опорный угол составляет 2 градуса, то относящаяся обследованная область находится на 15 м ниже основания лопасти винта. Это положение может сохраняться в таблице вместе с опорным номером фотографии этой области. Также меньшие угловые шаги могут сопоставляться положению. Сопоставление может происходить, например, посредством интерполяции. Альтернативно, также при использовании тригонометрических функций положение может еще точнее рассчитываться и сохраняться или альтернативно сначала сохраняться и позднее рассчитываться.
Предпочтительно обследующее устройство имеет, таким образом, устройство регистрации положения, которое включает в себя средство регистрации угла. Это средство регистрации угла может регистрировать угол выравнивания камеры, в частности, фотокамеры и/или телескопической оптики и, в частности, может технически производить последующую обработку данных, как, например, может передавать их на присоединенное обрабатывающее данные устройство. Средство регистрации угла может быть оснащено компасом и/или поворотным датчиком и/или устройством проверки горизонтальной поверхности (ватерпасом), для обеспечения возможности определения, таким образом, относительного и/или абсолютного угла. Дополнительные технические реализации также возможны.
Использование устройства регистрации положения посредством средства регистрации угла может происходить альтернативно или дополнительно для регистрации обследованного положения при помощи проекционного устройства.
В последующем изобретение разъясняется в качестве примера при помощи вариантов осуществления со ссылкой на сопровождающие фигуры.
Фиг. 1 схематично показывает расположение с ветроэнергетической установкой, подготовленной для обследования.
Фиг. 2 схематично показывает устройство для обследования лопасти винта.
Фиг. 3 схематично показывает ветроэнергетическую установку.
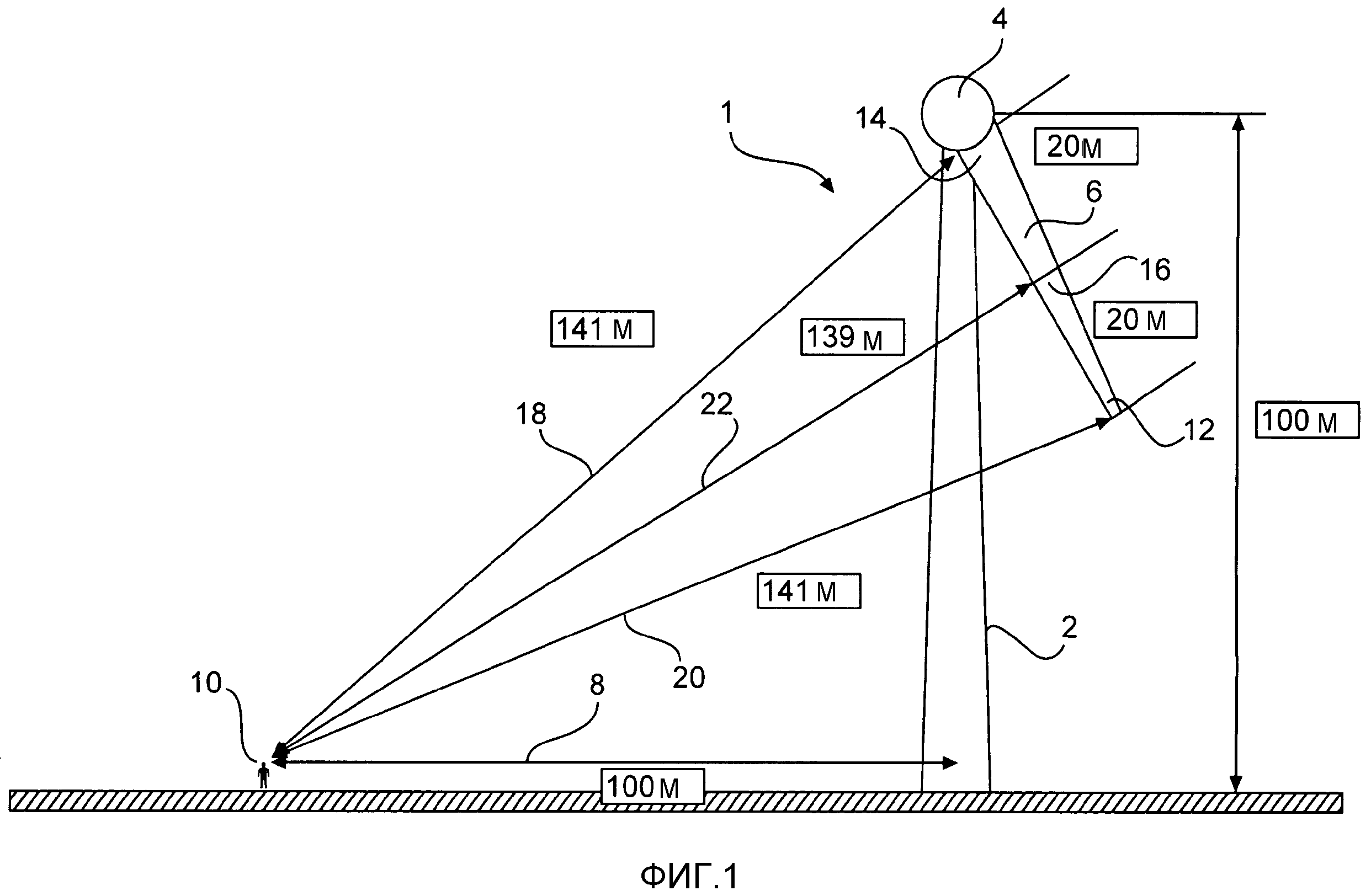
Фиг. 1 схематично показывает ветроэнергетическую установку 1 с башней 2 и гондолой 4 или ступицей 4, которая имеет три лопасти 6 винта, из которых на фиг. 1 изображена только одна.
Наблюдатель 10 находится на расстоянии 8 наблюдения далеко от башни 2. Расстояние 8 наблюдения наглядно показано посредством двойной стрелки, и в данном примере оно составляет 100 м, что представляет лишь примерное значение.
Из положения наблюдателя 10 можно проводить в этом случае обследование.
Лопасть 6 винта имеет конец 12 лопасти винта, который обозначается также как верхушка. По направлению к гондоле или ступице 4 лопасть 6 винта имеет область 14 основания с фланцем для прикрепления на гондоле или ступице 4. Фланец здесь не показан детально, но по сути дела образует область контакта ступицы с лопастью 6 винта. Между концом 12 лопасти винта и областью 14 основания находится средняя область 16.
Ветроэнергетическая установка стопорится для обследования таким образом, что лопасть 6 винта останавливается так, что расстояние до наблюдателя 10 между областью 14 основания и концом 12 лопасти винта является по возможности одинаковым. Если только расстояние 8 наблюдения и, таким образом, также расстояние наблюдателя 10 от лопасти винта является достаточно большим, расстояние от наблюдателя 10 до средней области 16 лопасти 6 винта примерно соответствует также расстоянию от наблюдателя 10 до области 14 основания или до конца 12 лопасти 6 винта.
В примере, выбранном согласно фиг. 1 для наглядности, ветроэнергетическая установка 1 имеет высоту ступицы 100 м. Расстояние 8 наблюдения от наблюдателя 10 до башни 2, а именно до подножия башни, составляет также 100 м. Однако не требуется, чтобы расстояние 8 наблюдения соответствовало высоте ступицы. Но этот предпочтительный вариант осуществления хорошо подходит для разъяснения данного способа обследования. Длина лопасти 6 винта показанного примера составляет 40 м, причем центральная точка ступицы 4 ротора упрощенно принимается как совпадающая с областью 14 основания лопасти 6 винта. Расстояние 18 до фланца, то есть расстояние от наблюдателя 10 до области основания или области 14 фланца лопасти 6 винта составляет, таким образом, 141 м.
Поскольку ротор удерживается в таком положении, что лопасть 6 винта расположена в таком положении, что расстояние 20 до верхушки, а именно расстояние от наблюдателя 10 до конца лопасти винта является таким же большим как расстояние до фланца, а именно 141 м. Расстояние до верхушки может отмечаться также как расстояние до конца лопасти винта. Соответственно расстояние 22 до средней области, а именно расстояние от наблюдателя 10 до средней области 16 лопасти 6 винта получается 139 м. Соответственно получается приблизительно - до нескольких метров
- одинаковое расстояние от наблюдателя 10 до различных областей лопасти 6 винта. Для наблюдения от наблюдателя 10 лопасти винта при помощи оптического аппарата может быть достаточно, таким образом, однократной наводки на резкость для обследования всей лопасти 6 винта. К тому же в показанном примере глубина резкости или коррекция глубины резкости или четкости оптического аппарата должна составлять или компенсировать только примерно 2 м.
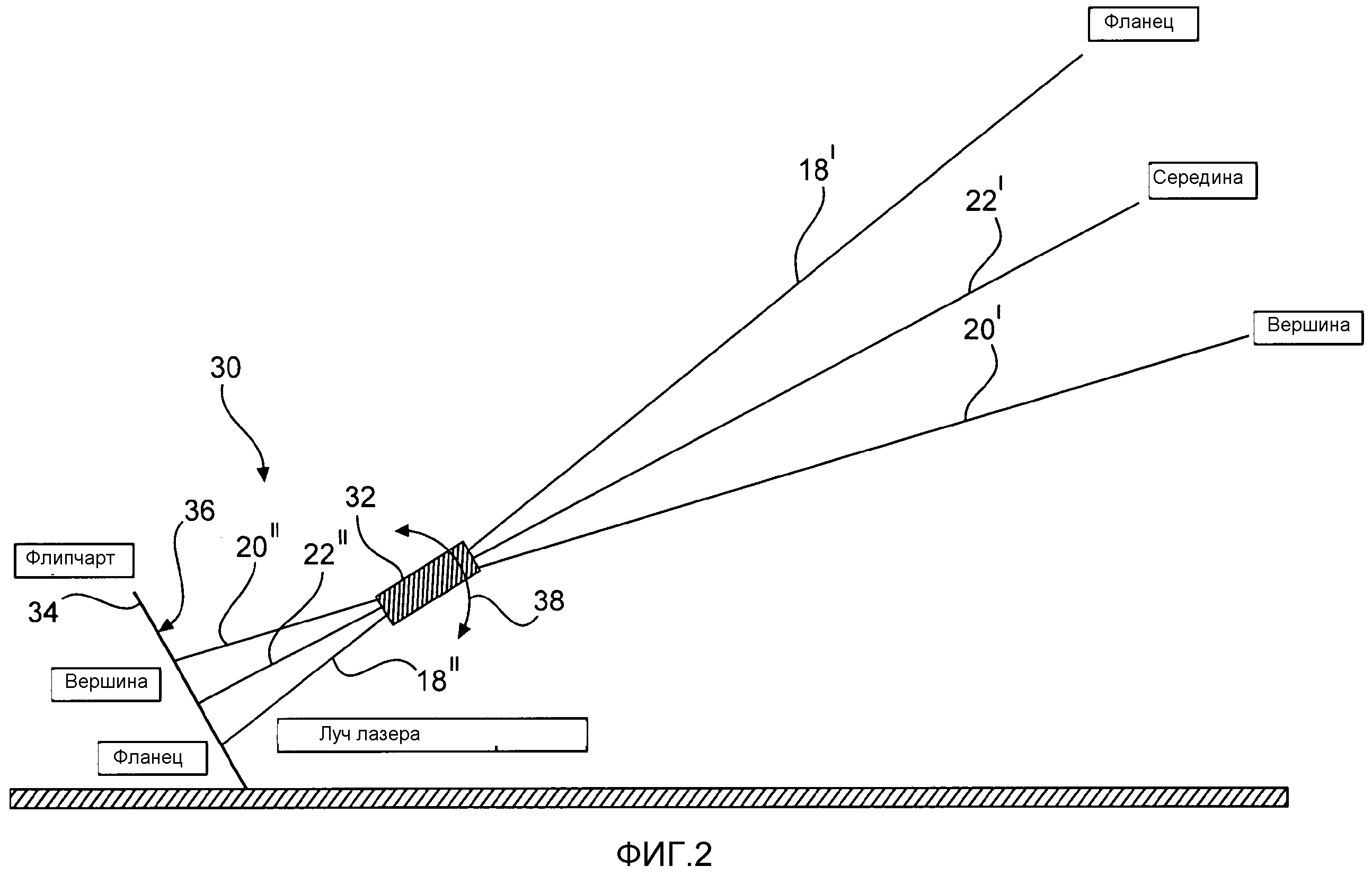
Обследующее устройство 30, то есть устройство для проведения обследования лопасти винта наглядно показано на фиг. 2. Обследующее устройство 30 имеет по существу камеру 32, в частности цифровую фотокамеру, а также воспринимающее проекцию средство 34 с проекционным экраном 36. В качестве воспринимающего проекцию средства может использоваться, например, так называемый или упомянутый, таким образом, флипчарт, то есть доска с писчей или рисовальной бумагой. Предпочтительно камера 32 закреплена на не показанном на схематичном изображении фиг. 2 штативе, для того чтобы на этом штативе осуществлять выравнивание в направлении лопасти 6 винта на обследуемую в определенный момент область лопасти 6 винта. Камера 32 выравнивается, таким образом, последовательно на поверхностные области обследуемой лопасти 6 винта, и соответствующие области фотографируются и могут анализироваться на месте или по прошествии времени. Фиг. 2 наглядно показывает в качестве примера выравнивание 18′ на фланец или на участок 14 основания лопасти 6 винта, выравнивание 20′ в направлении на верхушку или на конец 12 лопасти винта, и выравнивание 22′ на среднюю область 16 лопасти 6 винта. Выравнивания 18′, 20′ и 22′ проходят, таким образом, вдоль изображенных на фиг. 2 линий, которые наглядно показывают расстояние 18 до фланца, расстояние 20 до верхушки или расстояние 22 до средней области.
Для точности следует упомянуть, что на фиг. 1 и 2 поясняется способ обследования в качестве примера в одной плоскости, следовательно, выравнивание камеры 32 изменяется только вдоль продольной оси лопасти 6 винта. На самом деле выравнивание естественно может изменяться также поперек продольной оси лопасти винта. Фиг. 2 соответствующей двойной стрелкой наглядно показывает направление 38 поворота для выравнивания, посредством которого камера 32 может выравниваться вдоль продольного направления лопасти винта, в то время как второе направление поворота для выравнивания поперек продольного направления лопасти 6 винта проходит вглубь в плоскость чертежа фиг. 2 и не изображено по этой причине.
Кроме того, камера 32 имеет средство освещения, такое как, например, лазерный указатель или модифицированный лазерный указатель, при этом средство создает световой луч вдоль оптической оси камеры 32 в обратном направлении, а именно от камеры 32 в направлении на проекционный экран 36. Для показанных на фиг. 2 выравниваний, а именно выравнивания 18′ на фланец, 20′ на верхушку и 22′ на среднюю область отмечены соответствующие проекционные лучи, которые соответствуют соответствующему выравниванию. Таким образом, получается фланцевый проекционный луч 18″ при выравнивании 18′ на фланец, проекционный луч 20″ верхушки при выравнивании 20′ на верхушку и проекционный луч 22″ средней области при выравнивании 22′ на среднюю область.
При помощи получающегося светового пятна на проекционном экране 36 может документироваться обследование лопасти 6 винта на проекционном экране 36. Таким образом, например, для каждой фотографии, которая снимается в области лопасти 6 винта, в соответствующем положении на проекционном экране 36 может записываться соответствующий номер файла, например, номер файла с фотографией.
Посредством этого испущенного в обратном направлении светового луча, который может быть предусмотрен также в других направлениях, на проекционной поверхности 36, которая может быть, например, рисовальным листом, может изображаться общая форма, например, силуэт лопасти винта. Спроецированная таким образом лопасть винта повернута по отношению к оригинальной лопасти 6 винта на 180° и уменьшена. Так как величина обследуемой лопасти винта известна, возможно масштабирование простым способом проекции на проекционной поверхности 36. Например, также для упрощения дела может быть предусмотрено ожидаемое масштабирование или масштабирование на резиновой ленте, полученное при более раннем обследовании конструктивно идентичной ветроэнергетической установки. Таким образом, масштабирование может переноситься простым способом на новую проекцию, благодаря тому, что при небольших отклонениях соотношения величин несущая масштабирование резиновая лента может растягиваться на новую величину. Масштабирование пропорционально подгоняется и не должно пересчитываться снова.
Реферат
Группа изобретений относится к способу оптического обследования ветроэнергетической установки или части от нее, в частности лопасти винта, и обследующему устройству для осуществления данного способа. Способ включает выравнивание камеры на обследуемую область и проведение съемки фотографии обследуемой области камерой. Затем осуществляют регистрацию положения сфотографированной области и сопоставление выявленного положения со сфотографированной областью. Достигаемый при этом технический результат заключается в снижении затрат времени и расходов на проведение обследования, а также в автоматизации обследования и исключении риска высотных работ. 2 н. и 14 з.п. ф-лы, 3 ил.
Формула
- выравнивания камеры (32) на обследуемую область,
- проведения съемки фотографии обследуемой области камерой (32),
- регистрации положения сфотографированной области, и
- сопоставления выявленного положения со сфотографированной областью.
- регистрации по меньшей мере размера в продольном направлении обследуемой части от первой опорной точки до второй опорной точки части,
- определения по меньшей мере первого опорного угла, который указывает угол выравнивания для первой опорной точки,
- определения по меньшей мере второго опорного угла, который указывает угол выравнивания для второй опорной точки,
- определения текущего угла выравнивания, который указывает угол выравнивания для обследуемой на данный момент области, и
- выявления текущего положения обследуемой на данный момент области, по меньшей мере, по отношению к продольному направлению части, из текущего угла выравнивания, опорных углов и опционально из размера в продольном направлении, и/или
- сохранения текущего угла выравнивания и/или выявленного текущего положения в таблице вместе с данными проведенного обследования, в частности вместе со снятой фотографией и/или идентификационным кодом снятой фотографии.
- камеру (32) для съемки фотографии обследуемой области лопасти (6) винта,
- соединенное с камерой (32) выравнивающее устройство для выравнивания камеры (32) на обследуемую область, и
- устройство (30) регистрации положения для регистрации положения обследуемой области.
Комментарии