Импульсный локомотор - RU2659666C1
Код документа: RU2659666C1
Чертежи






Описание
Область техники
Настоящее изобретение относится к системам и движители, а более конкретно, к устройствам, которые продвигают медиа, жидкость и корабли в режиме колебаний, в жидкостях и на суше.
Уровень техники
Гребной винт и его различные модификации составляют основу большинства современных жидкостных двигательных систем. Проектирование и изготовление гребного винта требует мастерства динамики фольги, где важнейшими параметрами являются профиль, форма, площадь, угол расположения, количество и частота вращения лопастей. Более того, эксплуатационные качества большинства гребных винтов ограничены такими явлениями, как кавитация и срыв потока. Гребные винты также могут представлять смертельную угрозу живой природе. Известны попытки по разработке альтернативных движительных систем в виде крыльев, совершающих возвратно-поступательные движения, предположительно повышающих КПД (коэффициент полезного действия). Большинство используемых в настоящее время двигателей представляют собой устройства возвратно-поступательного действия, хотя в любом случае их используют в режиме вращения; при этом упрощение механической конструкции за счет прямого привода колеблющихся движительных систем являлось бы главным преимуществом. Движительные системы возвратно-поступательного действия также лучше подходят для эффективного использования энергии волн, что еще больше повышает КПД и способствует сохранению окружающей среды за счет уменьшения объема используемых углеводородов. Несмотря на ориентацию, и на основе способа приведения в действии, колеблющиеся в плоской двигательных системы могут быть широко представлены в вращательное колебание и переводя колебания. Вращательная система типа колебаний или рыбий хвост включает системы, где опоры или центр вращения находится по существу на передней кромке лопасти и систем с точкой опоры, расположенной в смещенной позиции, на некотором расстоянии вниз от передней кромки. Патенты США №4,214,547, США №4,894,032 иллюстрируют вращательное колебание на передней кромке лопасти. Вращающиеся колебания от смещения точки опоры иллюстрируются, например, в патенте США №6,250,585. Выполнение этих двигательных систем рыбий хвост типа ограничена естественной резонансной частоте материалов, используемых для строительства, тяга сокращается путем образования стоячих волн на резонансной частоте; настроенный совместимые приводной вал были описано, чтобы преодолеть это ограничение, по меньшей мере, до 5 Гц, в патенте США №6,250,585. возвратно-поступательные двигательных системы обычно включают фольгу, присоединенную к элементу передачи; фольга шарнирно прикреплена к передающему элементу таким образом, чтобы располагаться так, чтобы эффективный угол атаки путем дополнительных средств шарнира. Шарнир средства включают в себя ограничители диапазона движения и механической индексации связи и системы позиционирования, как показано, например, в патентах США №4,102,293, США №5,401,196, США №4,371,347. Современные системы колебательного перевода крыла требуют много двигающихся частей и считаются шумными и громоздким. Сложность механизмов, необходимых в современных системах переводческих создают проблемы высокой скорости работы. Кроме того, все существующие жидкости двигательные системы действуют исключительно на жидкости. Поэтому объектом и преимуществом импульсного локомотора является упрощенная саморегулирующаяся силовая установка, которая может воздействовать на твердые, жидкие и газообразные среды без необходимости использования устройств для рыскания, или пятовый шарнир крыла в жидкостях. Импульсный локомотор настоящего изобретения может работать частично или полностью погружен и на суше. Двигатель может использоваться в качестве смесителя для жидкости и может быть удаленно задействован электромагнитными полями, подобными магнитной мешалке, пропеллеру или подобным устройствам; Его также можно использовать в качестве двигателя тяги на лодках и плавании. Уникальная геометрия и работа импульсного локомотора обеспечивают циклическое ускорение и выброс окружающей среды для создания тяги и обеспечения смещения. При наземной эксплуатации импульсный локомотор прыгаетб, скакает в отдельных шагах, за счет использования или принуждение к земле или на земле. Специалисту в данной области техники очевидно, что длина хода 19 мм раскрыта в относительном заявке № СА 2854305. Прочие цели и преимущества настоящего изобретения станут очевидными на основе последующего подробного описания в привязке к чертежам.
Краткое описание чертежей
Полное понимание идеи настоящего изобретение может быть достигнуто в привязке к прилагаемым чертежам, рассматриваемым вместе с последующим подробным описанием, где
на фиг. 1 показано перспективное изображение одного из вариантов осуществления импульсного локомотора, показывающий нормальное прикрепление приводного вала к лопасти, и положение полости смазки;
на фиг. 2 показан график тяги, и потребления мощности для импульсного Локомотор длиной 0,30 м, и шириной 0,03 м, возвратно-поступательный в воде;
на фиг. 3 показан график влияния ширины лопасти на тягу, и частоту возвратно-поступательного движения;
на фиг. 4 показано перспективное изображение одного из вариантов осуществления импульсного локомотора, показывающий боковые кромки забор, смешивание поверхностей, и альтернативное размещение приводного вала;
на фиг. 5 показано перспективное изображение деталей конструкции одного из способов крепления лопасти к приводному валу с видом многоступенчатого тандемного варианта осуществления импульсного локомотора;
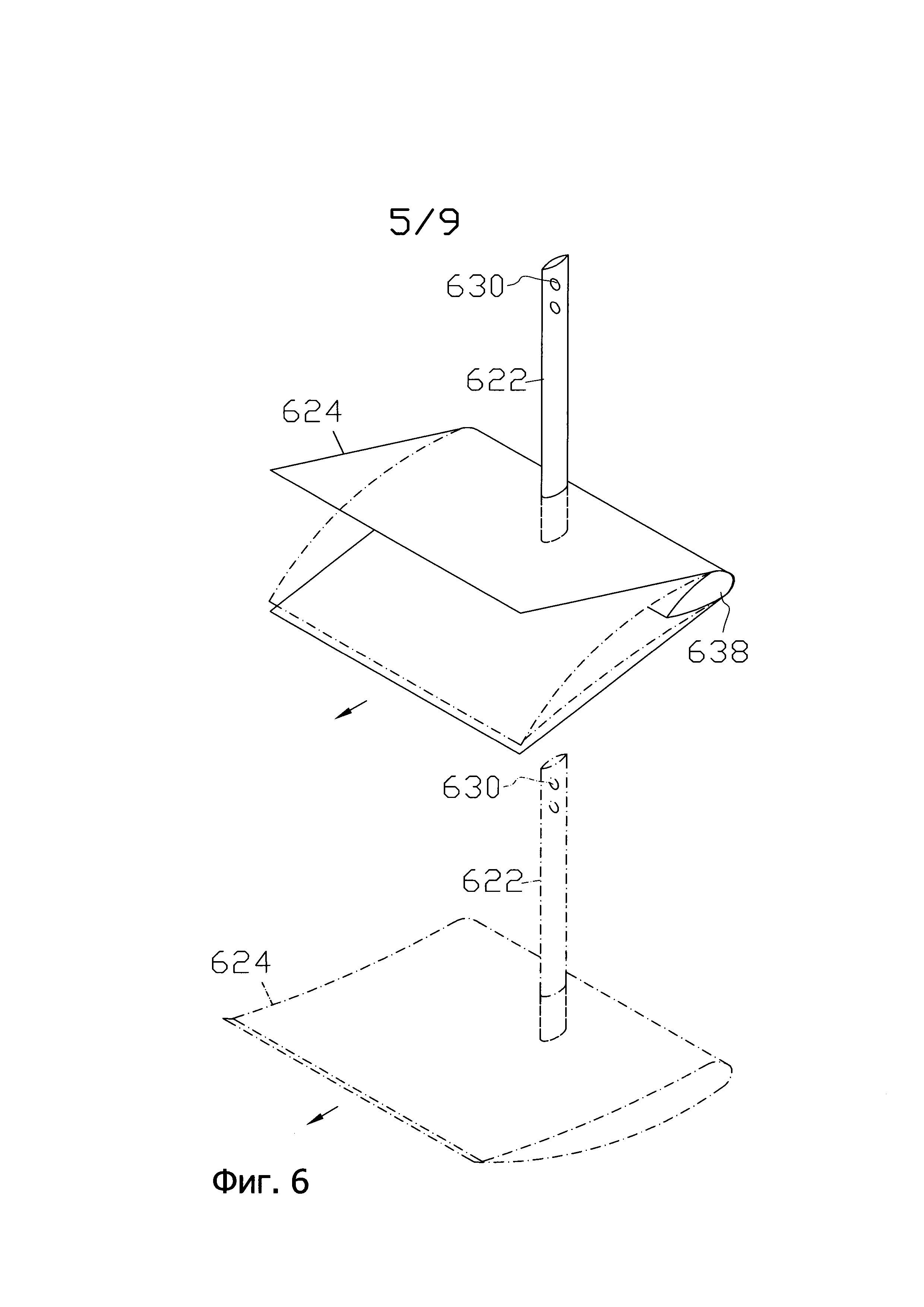
на фиг. 6 показано перспективное изображение V-образной варианта осуществления импульсного локомотора с нормальным креплением приводного вала к лопасти;
на фиг. 7 показано перспективное изображение варианта мульти-средах судна приводимой с импульсном локомоторном;
на фиг. 8 показано перспективное изображение варианта воздушного судна, приводимого в движение действием одного импульсного локомотора, и реакция, передаваемая на втором, поддерживающая импульсном локомоторе;
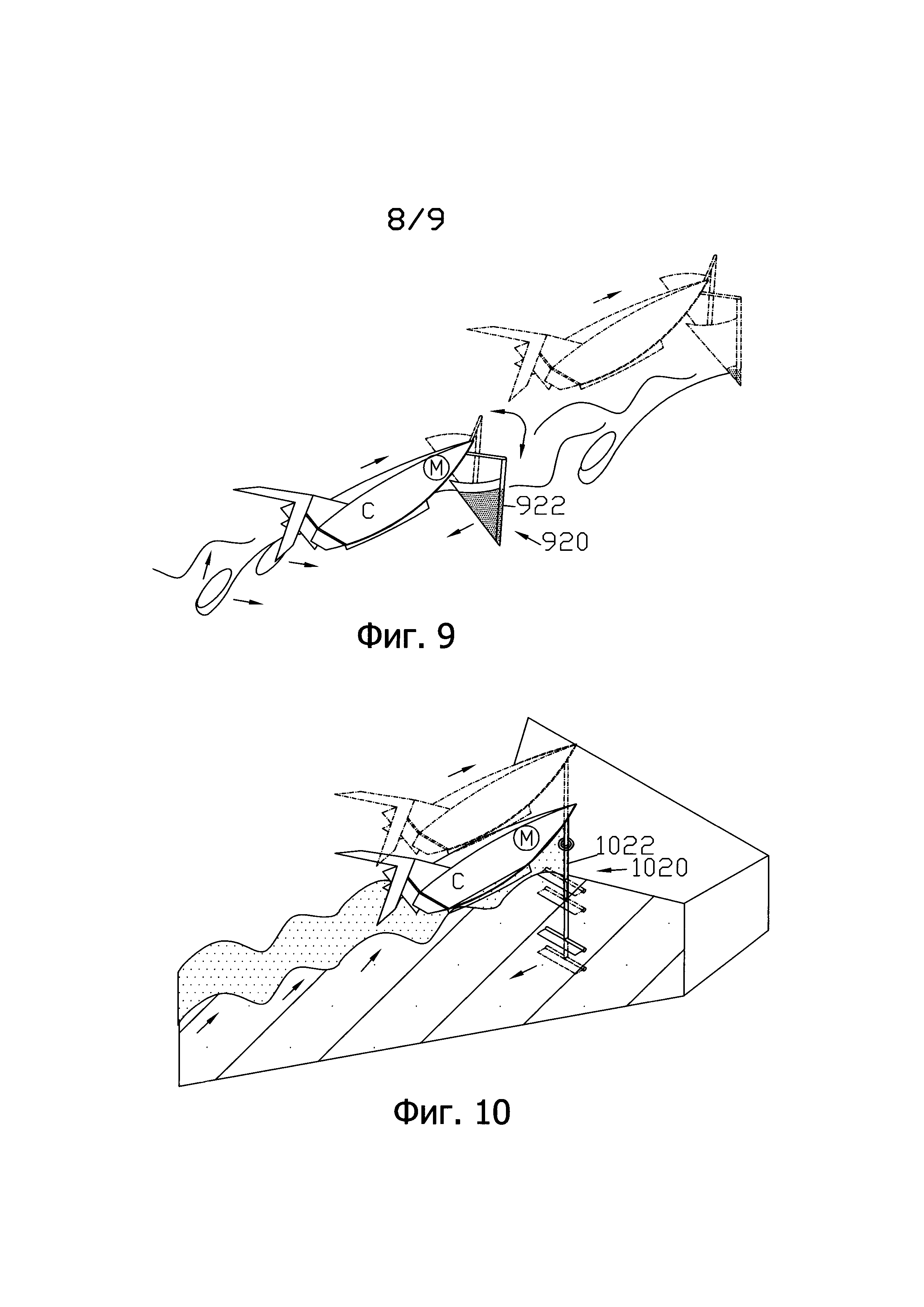
на фиг. 9 показано перспективное изображение варианта воздушно-плавучего судна, или «водвоздушного судна», приводимого в движение действием импульсного локомотора, с боку на бок переводом;
на фиг. 10 показано перспективное изображение мнимой секции через море, показывающий варианта водвоздушного судна, приводимого в движение возвратно-поступательным движением импульсного локомотора, с восходящее и нисходящее переводом;
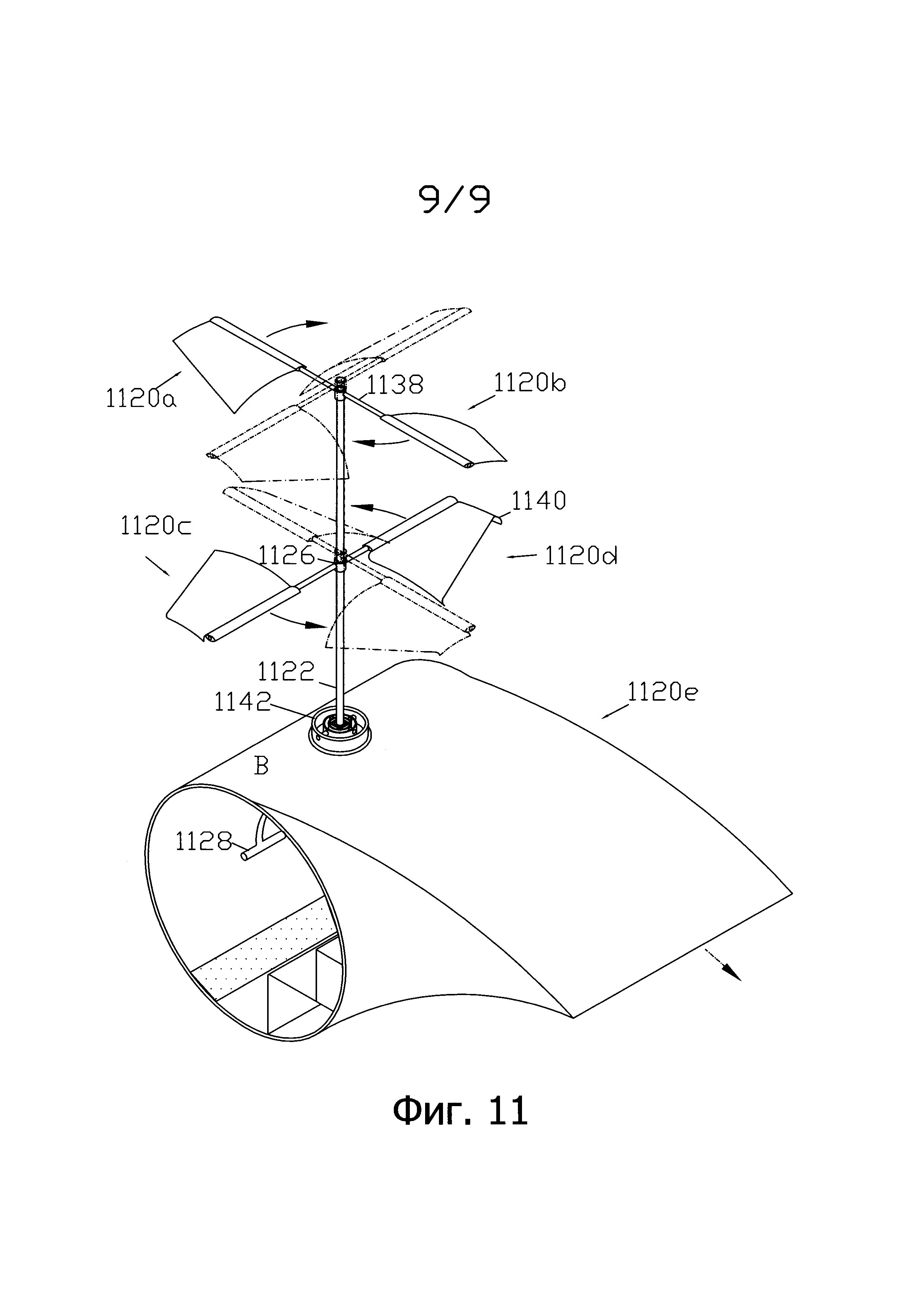
на фиг. 11 показано перспективное изображение одного из вариантов воздушного судна осуществления вертикального взлета и посадки (VTOL), работающего на импульсном локомоторе.
Сущность изобретения
Импульсный локомотор может приводить в движение окружающие жидкости при пульсации, возвратно-поступательном движении или колебании источником движущей силы. Устройство может служить двойной цели крыла и пропеллера, двигая корабль, поддерживая его в окружающих жидкостях. Устройство можно сделать, прикрепив ручку или приводной вал к переднему концу лопасти. Ведущий конец лопасти приводит устройство в направлении движения и имеет передний край; Наоборот, противоположным концом является задний конец с его задней кромкой. Аналогичным образом приводной вал, имеющий минимальное сопротивление в окружающих жидкостях, имеет передний край и задний край. Лопасть и приводной вал могут быть изготовлены из полимера, композита, дерева, металлов или любых других материалов, которые долговечны при предполагаемых динамических нагрузках; Лопасть и приводной вал преимущественно выполнен из материалов и профиля с низким сопротивлением. Задняя кромка лопасти и приводного вала является либо тонкой, либо преимущественно конической к тонкой кромке, чтобы пролить окружающие жидкости с минимальным сопротивлением; Передняя кромка преимущественно скруглая по радиусу для ускорения и продвижения потока на лопасти и приводном валу. Можно использовать разнообразную морфологию лопасти: прямоугольную, квадратную, треугольную, ромбовидную, трапециевидную и естественную форму плавников и крыльев, что очевидно для плавающих и летающих существ и машин. В некоторых вариантах осуществления приводной вал надежно соединен с лопастью, по существу, под прямым углом к поверхности лопасти или в нормальной конфигурации; В других вариантах осуществления приводной вал прикреплен рядом, в копланарной конфигурации к поверхности лопасти, нормальное прикрепление лучше всего подходит для взлета, подъема и опускания или вертикального возвратно-поступательного движения с помощью источника движущей силы, в то время как копланарное крепление лучше всего для перевода с боку на бок; переводя колебания находится в плоскости, перпендикулярной к поверхности лопасти. Однако режим возвратно-поступательного движения не ограничивается режимами крепления.
Копланарное крепление приводного вала дает преимущество усиления переднего конца лопасти. При использовании в вертикальной ориентации относительно поверхности водного тела, например, и при с боку на бок возвратно-поступательном перемещении этот вариант имеет преимущество минимального сопротивления в окружающих жидкостях; Перетаскивание приводного вала минимизируется, поскольку приводной вал интегрирован в передний край импульсного локомотора. При установке на судне глубина погружения сборки может варьироваться в зависимости от условий эксплуатации. Например, при увеличении скорости движения судно поднимает из воды, пропеллер остается частично в контакте с водой, часть которой находится вне воды, в воздухе. Это хорошо работает для эффективности, поскольку корабль, находящийся в воздухе, требует меньше пропульсивной силы в воде; Уменьшение площади погруженной поверхности пропеллера приводит к уменьшению сопротивления, что обеспечивает более быструю скорость колебаний. Движущееся движение корабля в ответ на выполнение возвратно-поступательного движения также усиливает и обеспечивает дальнейшее приведение в действие пропеллеров, прикрепленных к судну, нормальное прикрепление приводного вала: Реактивное движение корабля становится в основном взлетом вверх и вниз, обеспечивая лучшее управление рулем. Также вздымающееся движение корабля усиливает и обеспечивает дальнейшее приведение в действие пропеллеров, прикрепленных к судну. Однако приводной вал также приносит дополнительное сопротивление; Это сопротивление может быть уменьшено за счет использования средств обеспечения полости смазки, которые покрывают приводной вал быстродвижущейся жидкостью или жидкостью с плотностью ниже, чем плотность окружающей среды.
В зависимости от предполагаемого контекста использования передний конец лопасти может быть усилен, чтобы предотвратить коллапс или сгибание под динамической нагрузкой жидкости: методы, используемые для изготовления игрушечных бумажных самолетов, могут применяться для усиление. Таким образом, усиление может быть обеспечено путем сгибания или прокатки лопасти по самому себе, чтобы обеспечить либо цилиндрическую головку, либо V-образную лопасть с V-образной головкой. Вариант V-образного лопасти в настоящее изобретении включает аналогичные формы, такие как U-образная форма или другие подобные формы. Цилиндрический термин головки здесь включает модификации профиля для уменьшенного сопротивления, такие как, например, эллипсоидные, овальные и фольговые формы. Приводной вал прикреплен к головке лопасти сваркой, литьем, склеиванием, композитем, заклепками, фаснерами или любыми другими средствами, подходящими для материалов. Приводной вал преимущественно изготовлен из прочных, но легких материалов: например, полимеров, композитов, дерева, металлов. Подобные материалы могут быть использованы для обеспечения крепления лопасти с приводным валом, для дополнительного усиления. Такая фиксация может соединять приводной вал со сторонами лопасти, промежуточными позициями или любым другим положением, определяемым по техническим требованиям для предполагаемого контекста применения. Любая фиксация или адаптация приводного вала для обеспечения работоспособности здесь рассматривается как часть приводного вала и поэтому рассматривается как таковая. Любые другие материалы, подходящие для использования, могут использоваться для изготовления приводного вала. Если используется более крупное лопасть или где используются несколько двигателей или возвратно-поступательных механизмов для привода одного и того же лопасти, может быть предусмотрено множество приводных валов для надлежащей поддержки лопасти и его работы. В качестве альтернативы приводной вал можно интегрировать с лопастью путем литья, формовки, ковки, сварки или литья в виде единого устройства. Керноотборное лопасти и приводного вала с плавучими материалами могут использоваться для уменьшения нагрузки на возвратно-поступательное движение в окружающих средах: полимерные пены, такие как пенополистирол и полиуретан, являются примерами керна, которые могут использоваться для жидких жидкостей, таких как вода; Водород и гелий являются примерами керна, которые могут быть использованы для газообразных жидкостей, таких как воздух.
Приводной вал также может быть предпочтительно выполнен в виде полой трубы для транспортировки низкоплотной или быстро движущейся текучей среды на ведущую поверхность приводного вала, в результате чего можно уменьшить или управлять перетаскиванием окружающих жидкостей путем обеспечения полости смазочного материала над поверхностями. Аналогичным образом, уменьшение сопротивления с использованием полости смазочного материала может быть предусмотрено на передней кромке лопасти, головки и других связанных фитингов.
При возвратно-поступательном движении планирование лопасти выталкивает жидкость из задней кромки лопасти, заставляя двигатель в направлении, противоположном направлению выброса жидкости; Таким образом, импульсный локомотор может циклически подталкиваться вперед во время каждого хода и циклически расслабляться назад между штрихами. Эти циклические смещения увеличиваются с частотой хода, чтобы создать фигуры 8 (8-образной) и промежуточные, переменные пути возвратно-поступательного движения. Величина создаваемой таким образом тяги пропорциональна размеру пропеллера и частоте хода или возвратно-поступательного движения. Для гибкого лопасти выталкивание жидкости из задней кромки лопасти дополнительно способствуется динамическим изгиб лопасти, и наклонным путем возвратно-поступательного движения лопасти, индивидуально или в комбинации. Таким образом, жесткая лопасть, прикрепленна к приводному валу, может создавать тягу из-за планирования или глиссирования вдоль наклонных траекторий возвратно-поступательного движения, созданных или вызванных циклической направленной вперед и задней релаксацией пропеллера. Гибкие лопасти изогнут под жидкостной динамической нагрузкой и, таким образом, дополнительно усиливают ускорение жидкости и уменьшают сопротивление пропеллера в окружающих жидкостях. Материалы и способы изготовления металлических, полимерных и композитных продуктов известны специалистам в данной области техники и могут быть использованы в производстве описываемого устройства. Примеры критериев для подходящих материалов включают усталость и коррозионную стойкость, долговечность, легкость изготовления и другие характеристики, относящиеся к жидкости и контексту использования. Описываемое устройство может быть изготовлено методом или сочетанием методов штамповки, прокатки, экструзии, отливки, литья под давлением, ковки или механической обработки дерева, металлов, листовой стали или полимеров. Может быть также использован любой другой приемлемый способ изготовления. Соединение может быть выполнено с помощью сварки, склеивания или других способов крепления, например, заклепок. Однако оптимизированный динамический профиль жидкости, гидродинамический или аэродинамический, является преимуществом для низкого сопротивления. Материалы, а также соединения материалов и методов, подходящих для оборудования с высокой вибрацией, известны специалистам в данной области техники и, как правило, рекомендуются в зависимости от курса по конкретным параметрам применения.
Нулевая или положительная плавучесть устройства в окружающих текучих средах может быть использована для устранения или управления механическими нагрузками или гравитационными нагрузками, обусловленными массой устройства во время совершения колебаний; такая плавучесть может быть достигнута за счет закрепления плавучих материалов непосредственно на движителе или за счет использования полой конструкции с двойными стенками, между которыми располагается заполнитель, плотность которого ниже плотности окружающей текучей среды; например, для работы в газообразной атмосфере может быть использован гелий или водород.
Примерами заполнителя, который может быть использован для достижения требуемого уровня плавучести в жидкой текучей среде, такой как вода, могут служить вспененные полимеры, такие как полистирол и полиуретан. В промежутках между эксплуатацией Импульсный локомотор с длинным ходом, сохраняющий плавучесть в воде, может автоматически всплывать на максимально коротком расстоянии от судна в верхнем положении хода, что снижает риск повреждения движителя от столкновения с препятствиями в воде. Раскрытая динамика геометрии обеспечивает преобразование энергии текучей среды в тягу в рамках правил гидродинамики, соответствующих каждому отдельному случаю. Специалисту в данной области техники должно быть понятно, что могут быть использованы самые разные геометрические формы без существенного отступления от объема настоящего изобретения. Хотя автор изобретения полагает, что устройство может работать так, как это описано выше и так, как это будет описано ниже, он не хочет ограничиваться лишь этим. Описываемое устройство может удерживаться и активироваться рукой пользователя или приводиться в действие путем его установки в направляющей; при этом активировать устройство может также качательно-колебательное движение судна, на котором оно закреплено.
Варианты выполнения настоящего изобретения
Для ясности и краткости изложения те признаки, чьи функции совпадают или в основном совпадают, будут обозначены на каждой фигуре или в каждом варианте осуществления префиксом с номером фигуры, на которой проиллюстрирован вариант этого признака, и номером признака, стоящим за префиксом, одинаковым для всех вариантов
Основные варианты осуществления и операции лопасти - фиг. 1-3
Импульсный локомотор 120 показан на фиг. 1 с приводным валом 122, прикрепленным перпендикулярной к поверхности лопасти 124. Приводной вал 122 закреплен предпочтительно, по существу, до середины лопасти 124 вдоль передней кромки. Приводной вал 122 может быть соединен с возвратно-поступательным устройством или двигателем М, закрепленным на платформе Р; платформа Р с возможностью поворота прочно прикреплена к основанию или судну С, здесь в усеченной форме, через подшипник 126. Рулевое управление или векторизация движения может быть достигнуто путем поворота рукоятки управления или рулевой ручки 128, закрепленной на платформе Р, вокруг подшипника 126, как показано изогнутыми стрелками. Приводной вал 122 может быть соединен с двигателем М напрямую или посредством крепления через отверстие 130, например, с помощью крепежных элементов, болтов и гаек. Можно использовать любой другой метод безопасной связи.
При этом при совершении возвратно-поступательного перевода окружающие жидкости выбрасываются из задней кромки лопасти 124, как показано двумя нижними стрелками, заставляя импульсный локомотор 120 в направлении, противоположном направлению выброса жидкости. Фигура-8 и ее промежуточные пути возвратно-поступательного движения развиваются, как показано на фиг. 1, по пути s1 к el к s2 к е2 к s1. Начиная с положения покоя s1 нисходящий ход побуждает двигатель вперед, чтобы повернуть конечное положение el, вдоль наклонного пути sl-el, реакцией на движение жидкости назад. С конца положения хода el, двигатель расслабляется назад до положения s2 по пути el-s2; Восходящий ход побуждает двигатель вперед, к положение е2 вдоль пути s2-e2; Из положения е2 двигатель расслабляется до первоначальной позиции s1 вдоль пути e2-sl; Процесс продолжается до тех пор, пока импульсный локомотор 120 совершает возвратно-поступательное движение.
Таким образом, при возвратно-поступательном движении окружающая среда или текучая среда приводятся к задней кромке лопасти, тем самым вызывая реактивное смещение устройства, по существу, вдоль пути планирования лопасти. Таким образом, импульсный локомотор 120 циклически подталкивается вперед во время каждого хода и циклически расслабляется назад между ходами. Таким образом, жесткая лопасть 124, прикрепленна к приводному валу 122, может вызывать тягу, плавя вдоль наклонных возвратно-поступательных путей, создаваемых циклической направленной вперед и задней релаксацией пропеллера. Гибкие лопасти 124 изогнут под жидкостной динамической нагрузкой и, таким образом, дополнительно усиливают ускорение или тягу жидкости и уменьшают сопротивление пропеллера в окружающих жидкостях.
Лопасть 124 также может быть приварена к приводному валу 122 с эффективным углом текучей среды для обеспечения пропульсивного крыла в воде или так же в воздухе. Альтернативно, двигатель может быть под углом посредством прикрепленного карданного механизма, как описано далее. На фиг. 2 и 3 показаны влияние размеров устройства на частоту возвратно-поступательного движения, статическую тягу и потребляемую мощность для импульсного локомотора шириной 30 см с виниловым лопастью толщиной 0,075 см, возвратно-поступательный электродвигателем мощностью (54 Вт, постоянное напряжение). Потребляемая мощность увеличивалась с тягой, демонстрируя большие изменения при увеличении частоты возвратно-поступательного движения (фиг. 2). Как тяга, так и частота возвратно-поступательного движения обычно уменьшались с увеличением ширины лопасти (фиг. 3). Максимальная частота возвратно-поступательного движения (53 ход/с) превысила максимальная скорость (45 ход/с) для электродвигателя с возвратно-поступательным механизмом, без нагрузки, с пиком в диапазоне из 1 к 3 для отношения ширины лопасти к длине хода (19 мм), что был описанный в относительном заявке № СА 2854305.
Варианты осуществления настоящего изобретения, в которых для уменьшения лобового сопротивления используется снижающая трение смазочная полость - фиг. 1
Предполагается, что до тех пор, пока размер пропеллера и длина хода превышают размер пузыря, импульсный локомотор продолжает функционировать в условиях кавитации. Кавитационные пузырьки, образованные во время возвратно-поступательного движения, могут способствовать тягу путем выталкивания вместе с окружающей средой по мере удаления пузырьков с более низкой плотностью. Для судна в газообразных жидкостях возвратно-поступательное движение может смягчить отрыв пограничного слоя от поверхности пропеллера, размахивая через окружающие газы, а не останавливаться в турбулентности, как это делают текущие крылья. Одним из следствий этого эффекта является возможность работы на более высоких скоростях и высотах, которые являются маргинальным для текущих гребных винтов. Кавитация над импульсным локомотором может возникать при высоких частотах колебаний и скорости движения, что уменьшает сопротивление пропеллера. Альтернативно, жидкость с более низкой плотностью или быстро движущаяся жидкость может быть покрыта поверх импульсных опорных поверхностей, чтобы уменьшить сопротивление окружающим жидкостям. Средства формирования снижающее трение смазочной полости могут составлять единое целое с импульсным локомотором 120; или же они могут быть установлены независимо от импульсного Локомотор 120, например, на платформе Р.
На фиг. 1 показан импульсный локомотор 120, снабженный приводным валом 122, трубопроводно или жидкостно соединенным со входным отверстием смазки 132, и выходным отверстием смазки 134а через трубопровод смазки 136. Жидкость под давлением, такая как воздух или вода, транспортируется из источника L, прикрепленного к платформе Р, к выходному отверстию смазки 134а через входному отверстие смазки 132 и приводной вал 122, посредством трубопровода смазки 136. Для этой цели приводной вал 122 предпочтительно представляет собой трубчатый герметичный трубопровод. Жидкость под давлением выходит из выходного отверстия смазки 134а как показано волнистой линией, для покрытия передней поверхности приводного вала 122 и, таким образом, смазывает движение устройства в окружающих жидкостях. По мере перемещения пропеллера, приток встречных жидкостей, показанный средней стрелкой, покрывает смазку по поверхности приводного вала 122, как показано точками. Хотя выходное отверстие смазки 134а показано на нижний край приводного вала 122 на фиг. 1, он может предпочтительно быть установлен вместо верхней части приводного вала 122, чтобы взорвать струю воздуха, например, вниз или немного впереди передней кромки приводного вала 122.
Например, воздушноесопла, расположенный вдоль или немного впереди передней кромки приводного вала 122, может использоваться для покрытия приводного вала 122 оболочкой воздуха. В этом верхнем положении воздушный поток может способствовать уменьшению нагрузки возвратно-поступательного движения по восходящему ходу. Поставка жидкости под давлением к входному отверстию смазки 132 должна обеспечить возвратно-поступательное движение импульсного локомотора 120, как показано на расширенной трубопровода смазки 136, пунктирных линии; это может быть достигнуто, например, путем гибкого шланга, сильфона, подвижных уплотнений или статических уплотнений, охватывающих с приводным валом 122. В альтернативном варианте выходное отверстие смазки 134b может быть закреплено на платформе Р, например, перед движителем, чтобы взорвать струю воздуха в окружающие жидкости.
Стимулирование образования снижающей трение смазочной полости
Поверхность импульсного локомотора 120 может быть сконфигурирована или сконструирована для содействия естественному образованию пограничного слоя с пониженной вязкостью окружающих жидкостей, как это предусмотрено, например, кавитационными явлениями в воде; к примерам такой обработки поверхности можно отнести пескоструйную обработку, формирование ямок и микроструктур, которые уменьшают поверхностное трение с окружающей текучей средой. Поверхность, схожая с поверхностью мячей для гольфа. Механические вибрации, порождаемые источником движущей силы и механизмами, совершающими возвратно-поступательные движения, также могут способствовать возникновению кавитации на импульсном локомоторе 120, и опорном корабле, или основании С, тем самым уменьшая сопротивление. По мере того, как двигатель перемещается в окружающих жидкостях, скорость надвигающихся жидкостей увеличивает скорость выброса жидкости, что дополнительно усиливает тягу. Множество импульсных локомоторов может быть расположено в каскадном или тандемном устройстве для подачи жидкости из одного в приемное устройство другого, тем самым обеспечивая усиление пропульсивности с циклической регенерацией. Тандемное устройство может иметь общий приводной вал 122.
Варианты осуществления с головкой - фиг. 1, 4-7
Как показано на фиг. 1, головка 138 цилиндрической формы, цилиндрическая головка, может быть надежно прикреплена к передней кромке лопасти 124. Это может быть сделано путем непосредственного соединения головки 138 к лопасти 124 с помощью сварки, склеивания или другого способа соединения, подходящего для материалов; Прорезь может быть разрезана продольно в цилиндрической головке 138; Лопасть 124 скользит через паз в цилиндрическую головку 138 для соединения с помощью сварки, эпоксирования, склеивания или помехи. В качестве альтернативы, передний конец лопасти 124 может быть прокатан в цилиндр для обеспечения цилиндрической головки 138. Прокатанный передний конец лопасти 124 также может быть вставлен в просвет цилиндрической головки, причем лопасть 124 выступает через прорезь. Сборка может быть выполнена жесткой с помощью помехового фитинга или сваркой, склеиванием, эпоксидным покрытием или любым другим подходящим способом. Этот вариант осуществления обеспечивает возможность удобной замены лопасти 124; В качестве альтернативы, лопасть 124 может просто быть приварена постоянно к головке 138 и приводному валу 122.
Вариант цилиндрической головки также может быть выполнен посредством закрепления лопасти 124 на твердом или трубчатом цилиндрическом элементе, к которому затем прикреплен приводной вал 122. Цилиндрическая головка функционирует как ускоритель текучей среды первой ступени к ребрам, предусмотренным задним концом лопасти 124. Как показано на фиг. 4, головка может быть заполнена плавучим сердечником для уменьшения нагрузки возвратно-поступательного движения в окружающих жидкостях. Переходы между головкой 438 и лопасти 424 могут быть заполнены аналогичным материалом, чтобы плавно смешать поверхности или филе, радиус головки 438 в лопасти 424; Поверхностное смешивание эффективно создает структуру крыла, надежно соединенную с приводным валом 422. Таким образом, конструкция крыла, прикрепленная к приводному валу 422 и работающая в соответствии с настоящим изобретением, считается эквивалентной лопастью и настоящим заявляется как импульсный локомотор.
Соединение между приводным валом 422 и лопастью 424 может быть смешано таким же образом, чтобы уменьшить сопротивление окружающим жидкостям. На фиг. 4 также показано Боковая кромка забор 440, установлении на левой стороне крыла; противоположная сторона кромка забор 440 показан пунктирные линии на правой стороне. Боковая кромка забор 440 направляет поток текучей среды по лопасти 424 или крыло, образующееся в результате смешивания поверхности. Боковая кромка забор 440 также обеспечивает некоторую степень боковой устойчивости во время возвратно-поступательного движения и перемещения пропеллера. Боковая кромка забор 440 предпочтительно изготовлен из обтекаемого, тонкого листового материала и сильного, чтобы свести к минимуму сопротивления в окружающей жидкости. Другие материалы и формы могут быть использованы в зависимости от контекста эксплуатации. Боковая кромка забор 440 может быть уменьшен пополам и сформировано так, чтобы иметь кривизну для направления потока текучей среды на одну сторону лопасти 424 вдоль боковых краев под прямым углом к плоскости лопасти 424. Например, с обращенными вниз директорами потока боковой кромки, окружающая жидкость направлена вниз и ускоренна во время восходящего хода, из-за изогнутую поверхность директора потока бокового края. Ускорение жидкостей вниз снижает нагрузку на возвратно-поступательное движение. На нисходящего ходу окружающая жидкость направляются через лопасть 424 по направлению к задней кромке. В качестве директора потока боковой кромки может использоваться продольная часть цилиндра. Угол направления текучей среды может варьироваться в соответствии с эксплуатационными требованиями, такими как обеспечивается стабильность при возвратно-поступательном движении и перемещении.
Альтернативное присоединение нескольких приводных валов 422 к головке 438, или к лопасти 424 также показано на фиг. 4, в фантомных линиях. На фиг. 5 показаны детали другого способа конструкции устройства с использованием Т-образного приводного вала 522, имеющего головку 538 и стойку. Стойка представляет собой рукоятку возвратно-поступательного движения, предназначенную для соединения с источником движущей силы, например, посредством болта через апертуру 530, как описано выше. Лопасть 524 зажато между парными полуцилиндрами, вместе образуя головку 538, просверленные отверстиями для крепления; Крепежные детали, представленные здесь в виде четырех винтов или болтов, используются для сборки лопасти 524 и парных полуцилиндров вдоль проекционных линий. Множество импульсных локомоторов может быть расположено в каскадной или тандемной компоновке для подачи эжекции жидкости от одного к входу другого, тем самым обеспечивая усиление пропульсивности с циклической регенерацией, как показано на фиг. 5. Еще одного из вариантов осуществления с головкой может быть снабжен по существу V-образную головку, подобную хвостовым плавникам быстроплавающих морских существ, в Например, рыба тунца. Вариант головки V-образной формы обеспечивает форму с уменьшенным сопротивлением, и поэтому особенно выгодно на кораблях, путешествующих с высокой скоростью. V-образная головка может быть построена любым другим способом.
Вариант осуществления импульсного локомотора с V-образным лопастью - фиг. 6
Лопасть 624 складывается сама по себе в V-образную форму, как показано на фиг. 6, с верхним и нижним ребрами или V-образными руками. Приводной вал 622 прикреплен к переднему концу V-образной лопасти, преимущественно по существу до центра давления профиля крыла, который может образовать в ходе операции. Для нормального крепления приводной вал 622 прикреплен через верхнему и нижнему руками.. В качестве альтернативы, приводной вал 622 может быть прикреплен к головке 638, над которым V-образная лопасть была завернута. Для копланарного крепления, головка 638 в расширенной форме принимает функцию приводного вала 622. Удобная конструкция для Т-образного приводного вала включает в себя драпировку V-образного лопасти на каждое плечо головки 638 с обеих сторон приводного вала 622, в копланарной конфигурации; При низкой частоте хода и скорости, руки V-образной лопасти функционируют как отдельные ребра, толкающие назад окружающие жидкости, что предварительно ускоренные выпуклой головкой 638 V-образной лопасти.
Изгиб V-образных руках под динамической нагрузкой жидкости также способствует ускорению окружающих жидкостей. По мере увеличения скорости хода, V-образные руки тянутся друг к другу, начиная с их задних краев и продвигаясь к передней кромке, как показано на фантомных линиях, конфигурация V-образного лопасти показана сверху для восходящего хода, в фантомных линиях и аналогично внизу, для нисходящего хода. В зависимости от структуры движения окружающих жидкостей задние кромки сначала соединять, создавая профиль крыла максимальной толщины; По мере увеличения скорости хода, толщина крыла постепенно уменьшается по направлению к передней кромке. Увеличение скорости движения устройства в окружающих жидкостях дополнительно усиливает изменяющийся, или морфинг V-образного лопасти в переменное крыло. Этот вариант осуществления обеспечивает пропеллер с двойными ребрами при низкой скорости движения, и обтекаемым профилем крыла адаптирующимся к высоких скоростях. Дивергенция V-образных руках влияет на скорость перемещения и скорость хода, при которых V-образные руки натягиваются друг к другу, образуя профиль крыла. Таким образом, управление дивергенция V-образных руках обеспечивает способ проектирования для крыла адаптирующимся к скорости.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Гидронасосы, суда - морские или речные суда (плавучие средства), на суше и воздушные суда, Водвоздушного Судно, многосред корабль
Общее применение импульсного локомотора заключается в перемещении жидкостей, будь то в закрытых оболочках, используемых для насосов или в открытом состоянии, как используется для смешивания, аэрации жидкостей, и вентиляция, например. Прикрепленное к судну, устройство может обеспечивать движимое средство для перемещения судна или транспортировки с помощью мощности волны или движущей силы на борту. Движение приводного вала может направляться с помощью скользящего механизма, взаимодействующего с ним канала, или направляющей ролика для удобства работы. Движение приводного вала может также направляться охватывающей муфтой, втулкой, качающимися рычагами или роликовым подшипником в сборе, прикрепленным к опорному основанию или судну: для фиксации ориентации тяги может быть использована квадратная скоба, при этом для регулирования направления тяги, например, для удержания на курсе или маневрирования, может быть использована круглая скоба, выполненная с возможностью вращения. Альтернативные средства для управления и векторизации тяги с импульсного локомотора включают в себя карданов подвес и другие карданные механизмы. Колебание пропеллера может быть обеспечен непосредственно от источника Возвратно-поступательные движения, такие, как мышцы, поршневой двигатель, или с помощью преобразователя механизмов движения, таких как кривошипно-шатунные механизмы и устройства на основе треугольного шатуна (шотландского механизма, например).
На фиг. 7 показан вариант воплощения транспортного машины (многосред корабль), приводимого в действие импульсным локомотором 720, возвратно-поступательным движением двигателя М. Этот гибридный водный и воздушный корабль может быть сконструирован путем крепления к основанию В, устройству управления ориентацией, или рулевым управлением, здесь проиллюстрировано Карданный механизм, или кардан 742, вращательно прикрепленный к основанию В через подшипник 726. Двигатель М и направляющая приводного вала 744 закреплены вместе или на доске карданов746; Направляющая приводного вала 744 надежно соединена с внутренней, подвижной частью карданов742. Приводной вал 722 с возможностью скольжения прикреплен к направляющей приводного вала 744 и надежно соединен с двигателем М для возвратно-поступательного движения. Импульсные локомоторы 720а, 720b для газовых или воздушных двигателей разделяют приводной вал 722 совместно с импульсными локомоторами 720с, 720d, для движения жидкости или воды, и перемещения на суше. Рулевая ручка 728 кооперативно закреплена к связям карданов 748. связь карданов 748 надежно, и шарнирно соединено с доске карданов 746, например, с помощью шаровых шарниров; Это соединение индексирует кардану 742 к движению рулевого управления ручкой 728: перемещение рулевой ручки 728, вперед, и назад, наклоняет под углом к импульсным локомоторам 720а, 720b и 720с, 720d вперед, и назад, соответственно. Поскольку кардан 742 прикреплен с возможностью вращения к основанию В, поворот рулевой ручки 728 влево и вправо поворачивает импульсные локомоторы 720а, 720d влево и 720b, 720с вправо, или в противоположных направлениях, тем самым обеспечивая рулевое управление. Ориентация карданов 742 управляется поворотом рулевой ручки 728, так же, как рукоятка в велосипеде, по крайней мере для переднего конца машины. В качестве альтернативы, двигатель М может быть установлен на основании В, а импульсные локомоторы возвратно-поступательные посредством общий карданного вала, что позволяет наклонят под углом вперед, и назад, и поворот рулевой ручки в кардане 742.
Этот вариант осуществления обеспечивает пропульсивность с циклической регенерацией посредством каскад тяги от импульсного локомотора 720а до 720b для воздушной тяги, и от импульсного локомотора 720d до 720с для водного тяги. Колебание импульсного Локомоторы 720с, 720d также позволяют перемещаться на суше или передвигаться, надеясь или циклически перемещаясь по земле, грязи, снегу, льду или другим средам. Для управления по земле, рулевая ручка 728 тянется назад или вперед, чтобы поднять ступень импульсных локомоторов 720с, 720d против местности для перемещения назад или вперед соответственно. Импульсные локомоторы могут быть сделаны до тех пор, пока это необходимо для правильной поддержки и балансировки корабля на земле, в воде и на воздухе, в зависимости, конечно, по размеру, весу и параметрам производительности. В качестве альтернативы по меньшей мере одно колесо 750 или предпочтительно пара колес может быть надежно соединено с основанием В для дальнейшего баланса и облегчения движения, в зависимости от условий эксплуатации, компоненты могут быть изготовлены из плавучих материалов, как обсуждалось ранее, чтобы помогать плавать в жидкостях или жидких средах, например, в воде, грязи или болоте. Хотя на фиг. 7 показаны два отдельных двигателя, второй двигатель является факультативный; одни двигатель может быть функционально соединен с передним и задним импульсными локомоторами посреством кривошипно-шатунный механизм, оживляя передние и задние импульсные локомоторы на 180 градусов фазе, например: эта компоновка облегчает ходьбу из машина, поскольку шаги идут в шаге, сродни человеческой прогулке. Любая другая фаза может использоваться в зависимости от параметров конструкции. Требуется безопасный жгут или сидения для оператора, прикрепленный к судну (не показан). База В может быть представлена в виде импульсного локомотора для приведения в действие реактивным импульсом, как описано далее для фиг. 8; Вариант осуществления может быть снабжен обтекаемым телом или украшениями, не обязательно выходящими из сущности настоящего изобретения.
На фиг. 8 показан самолет с корпусом в форме импульсного локомотора 820b, оборудованный катящимися устройствами в виде колес 850 для посадки и взлета. Поверхности управления полетом, примером которых являются передняя крылья, установлены на корпусе. Импульсный локомотор 820а совершает возвратно-поступательное движение от двигателя М; Двигатель М надежно соединен с импульсным локомотором 820b основания, и совершает возвратно-поступательном движение импульсного локомотора 820а посредством кардана 842, как описано выше для фиг. 7.
При возвратно-поступательном движении, указанном в фантомных линиях, импульсный локомотор 820а выталкивает корабль вперед и наращивает скорость, чтобы обеспечить полет корабля. Импульсный локомотор 820b совершает возвратно-поступательное движение реактивным импульсом к возвратно-поступательному движению импульсного локомотора 820а двигателем М, как указано в фантомных линиях. Контроль полета может осуществляться через кардана 842, как обсуждалось ранее на фиг. 7, и движением переднего крыльев. На фиг. 9 показан импульсный локомотор 920, представленный в виде треугольной формы, прикрепленный к аэродинамическому судну С для с боку на бок возвратно-поступательного движения с помощью двигателя М, вдоль дугообразной траектории колебания, указанной стрелки. Выброс жидкости в направлении, показанном стрелкой в левой нижней, придает реактивный движущий момент корабля С, перемещая его в противоположном направлении, показанным верхними стрелками.
На низкой скорости корабль связан с водой, а импульсный локомотор 920 в основном или полностью погружен в окружающую среду. По мере того, как корабль С поднимает скорость, аэродинамические поверхности поднимают самолет в воде или летательном аппарате, чтобы летать над окружающими жидкостями, как показано на фантомных линиях. Треугольный импульсный локомотор 920 обеспечивает преимущество высокой площади поверхности и высокой тяги на низкой скорости, а также уменьшает площадь поверхности и сопротивление при высокой скорости хода, как показано на заштрихованных участках. Водвоздушного Судно предлагает преимущества работы на воде как на лодка, так и на воздухе в качестве воздушного судна, оснащенного водным двигателем. Судно может быть спроектировано таким образом, чтобы летать над неровными морями, контролируя высоту, обеспечиваемую переменной длиной погруженной части приводного вала 922. Снижение сопротивления и, полет в зоне влияния земли, приводят к улучшению экономии топлива и скорости движения. Согласно этому варианту осуществления предусмотрена также центробежная составляющая ускорения, обусловленная дугообразной траекторией поворота пропеллера: установка пропеллера на задней части судна в хвостовой конфигурации, подобной рулю, собирает эту дополнительную тягу. Однако передняя установка, показанная на фиг.9, имеет преимущество в использовании некоторой тяги, создаваемой боковым движением пропеллера, показанной тремя наклонными стрелками влево; Жидкость перед кораблем движется впереди корабля, достигающего его; Корабль С не обязательно трудиться стоячей воде.
Принимая во внимание, для целей иллюстрации, вариант осуществление было описано со ссылкой на воду, указанные идеи относятся, в общем, к жидким текучим средам и средам различной плотности. Во время работы описываемое устройство служит также источником выработки энергии, как это делают гребные винты, преобразующие энергию потока жидкости в механическую работу. На фиг. 10 показан пример летательного аппарата, приводимого в движение с помощью импульсного локомотора 1020, приводимого в действие двигателем М на судне С. Импульсный локомотор 1020 совершает возвратно-поступательное движение вверх и вниз, ускоряя и выталкивая окружающие жидкости назад из судна, создавая волны, задние движущиеся волны окружающих жидкостей или вхостволны, как альтернативно упоминается в дальнейшем.
Вхостволны придают реактивный движущий момент импульсному локомотору 1020 и судну С, к которому он прикреплен. Направление выброса воды показано стрелкой внизу; Направление движения корабля противоположно направлению выталкивания воды, как показано стрелкой вверх. Движущееся движение вверх и вниз Импульсного локомотора 1020 также создает передние движущиеся волны окружающих жидкостей или переволны, как альтернативно упоминается ниже. Как указано в точках и трех наклонных стрелках слева от корабля С, переволны движутся в том же направлении, что и корабль С. Переволны несут корабль в направлении движения; По существу, это означает, что корабль, возможно, не обязательно трудиться ненарушенным жидкостям перед судном, как это принято с современными двигательными системами. Переволны добавляют к тяге из вхостволн. Таким образом, импульсный локомотор 1020 может приводить в движение судна с помощью вхостволнов от тяги, а также нести корабли по переволнам от возвратно-поступательного движения. По достижении скорости взлета, корпус судна отрывает от воды, чтобы летать в воздухе, как показано на фантомных линиях. Импульсный локомотор 1020 остается погруженным или частично погруженным. Во время работы описываемое устройство служит также источником выработки энергии, как это делают гребные винты, преобразующие энергию потока жидкости в механическую работу. Судно "водвоздушного Судно " может быть спроектировано для полета над грубыми морями путем управления высотой, обеспечиваемой переменной длиной погруженной части приводного вала 1022.
Снижение сопротивления, пролетев крыло близкие к земле, приводит к улучшению экономии топлива и скорости движения. В вариантах на фиг. 9 и 10 осуществления судна характеризуется определенной автономностью в полностью аэродинамическом полете, когда достигается достаточная скорость для отрыва от воды, и судно по инерции совершает кратковременный полет. Фиг. 11 иллюстрирует применение импульсного локомотора в вертикальном взлете и приземлении (VTOL). Вертолетное судно может быть сконструировано путем закрепления на основании В, устройства управления рулевым управлением или поворота, здесь проиллюстрировано карданом 1142. кардан 1142 соединен с двигателем и направляющей приводного вала на доске карданов, как описано выше для фиг. 7. Рулевая ручка 1128 управляет ориентацией карданов.
Головка 1138 надежно прикреплена к приводному валу 1122 через подшипник 1126. Приводной вал 1122 с возможностью скольжения прикреплен к направляющей приводного вала (744) и функционально соединен с двигателем М для возвратно-поступательного движения. На головке 1138 выполнено по меньшей мере одно лопасть или предпочтительно пара противолежащих лопастей для обеспечения импульсного локомотора 1120a-1120d. Лопасть может быть предпочтительно выгнуто для максимального подъема и снабженный боковой кромкой забора или потока директора 1140. Основание В преимущественно имеет форму, служащую головкой импульсного локомотора 1120е для возвратно-поступательного движения реактивным импульсом к возвратно-поступательному движению приводного вала 1122 с помощью двигателем М (показан на фиг. 7). Импульсный локомотор 1120е также служит кабиной и подъемным телом во время полета. Топливо для двигателя М может храниться в контейнере за сиденьем, перед которым находится опорная поверхность подставки для ног, показанная в пунктирной области. При возвратно-поступательном движении приводного вала 1122 импульсные локомоторы 1120а, 1120b перемещают окружающие жидкости, чтобы заставить головку 1138 вращаться вокруг подшипника 1126 по пути вращения, указанному двумя верхними изогнутыми стрелками. Это индуцированное круговое вращение усиливает и увеличивает тягу, создаваемую возвратно-поступательным движением. При эффективной скорости возвратно-поступательного движения корабль поднимается, чтобы летать, как вертолет. Вторая пара импульсных локомоторов 1120с, 1120d может быть установлена таким же образом, преимущественно в режиме противоположного вращения, как показана на пути вращения, показанный два нижних изогнутых стрелок.
Головки противовращающих импульсных локомоторов могут быть установлены непосредственно на приводном валу 1122, под фиксированным углом, например, на 90 градусов друг к другу, перемещая подшипники 1126 внутри направляющей приводного вала (744): в этом варианте осуществления приводной вал 1122 вращается внутри направляющей приводного вала (744) во время возвратно-поступательного движения. Управление полета может быть достигнуто путем изменения Ориентация приводного вала
1122 и импульсных локомоторов с помощью кардана 1142 (742) посредством манипулирования рулевой ручки 1128. Самолет поднимается или опускается в зависимости от количества поднятого лифта и движется в направлении наклона приводного вала 1122. Предпочтительно вес на стороне входной рукоятки рычага, на опоре обеспечиваемой карданом, больше чем вес возвратно-поступательных импульсных локомоторов на выходной стороне. Такое расположение накладывает автоматическую конфигурацию отвеса к двигательной системе, под действием силы тяжести. Конфигурация отвеса обеспечивает стабильный висение, подъем и спуск, и маневренность.
Спортивны судна, и устройство плавания помощи
Импульсный локомотор может быть возвращен вручную. Задача возвратно-поступательного движения может быть облегчена путем соединения пропеллера с рычагом, прикрепленным к основанию. Такие устройства для использования импульсного локомотора были бы очевидны для специалиста в данной области техники без существенного отступления от объема настоящего изобретения. Примеры альтернативных приводных систем описаны в патенте США №2,979,018, выданном Бердсолу (Birdsall) в 1961 году, и в патенте США №3,236,203, выданном Бремсону (Bramson) в 1966 году. Представлены судна могут удерживаться на плаву импульсными локомоторами, представляя собой тип судна на подводных крыльях; в этом случае импульсные локомоторы становятся пропульсивными гидрокрыльями с регулируемым углом тяги по типу существующих систем регулирования углов гидрокрыла. В альтернативном варианте импульсные локомоторы, обладающие некоторой плавучестью, могут использоваться в судах, снимающих с водной поверхности пену и плавающие вещества.
Поскольку прочие модификации и изменения, в которые внесены поправки для обеспечения их соответствия конкретным эксплуатационным требованиям и внешним условиям, будут очевидны специалистам в данной области техники, настоящее изобретение не ограничивается примером, выбранным для рассмотрения, а охватывает все изменения и модификации, не выходящие за пределы объема настоящего изобретения. Кроме того, объем правовой охраны раскрытого в настоящем документе изобретения ограничивается лишь прилагаемой формулой изобретения.
Легенда:
20 Импульсный локомотор
22 приводной вал
24 лопасть
26 подшипник
28 Рулевая ручка
30 отверстие
32 входное отверстие смазки
34 выходное отверстие смазки
36 трубопровод смазки
38 цилиндрическая головка
40 боковая кромка забор
42 кардан
44 направляющая приводного вала
46 доска карданов
48 связь карданов
50 колесо
Реферат
Изобретение относится к системам и движителям, а более конкретно к устройствам, которые продвигают жидкость и суда в режиме колебаний в жидкостях и на суше. Устройство для приведения в движение судов и жидкости при энергии текучей среды содержит лопасть, жестко соединенную с приводным валом. При совершении возвратно-поступательного движения окружающие среды принудительно перемещаются к задней кромке лопасти, вызывая тем самым реактивное перемещение устройства, по существу вдоль траектории планирования лопасти. Устройство прикреплено к источнику движущей силы при помощи отверстия. Устройство может приводиться в действие напрямую источником движущей силы, совершающим возвратно-поступательные движения, и опосредованно за счет реактивного момента, передаваемого опорной платформой. Векторизация тяги может быть достигнута путем поворота рулевой ручки на подшипнике, закрепленной с возможностью вращения с платформой и основанием. Смазочный материал подается из источника L к выходному отверстию по трубопроводу и к входному отверстию, чтобы покрыть устройство со смазочной полостью, для снижения лобового сопротивления. Лопасть планирует вдоль 8-образной траектории возвратно-поступательного движения. Достигается преобразование энергии текучей среды в тягу. 3 н. и 15 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Плавниковое движительное устройство
Комментарии