Плавниковое движительное устройство - RU2482012C2
Код документа: RU2482012C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к движительной установке для морского судна, в которой средство, применяемое для приведения в движение, включает в себя машущие или колеблющееся подводные крылья или рули.
Согласно одному аспекту настоящее изобретение относится к движительному устройству, обеспеченному внутри корпуса морского судна.
Устройство содержит по меньшей мере один поперечный выдвигаемый плавник движителя, установленный на валу плавника. Средство для привода плавника содержит коленчатый вал, механизм колебаний относительно поперечной оси для поворота плавника вокруг оси вала плавника и механизм перемещения в вертикальной плоскости для перемещения плавника в, по существу, поперечном относительно оси вала плавника и судна направлении.
Предшествующий уровень техники
Движительные установки используют много лет, особенно для движения морских судов, и большинство используемых сегодня движительных установок представляют собой движитель с вращающимся гребным винтом. Даже если движительная система с вращающимся гребным винтом обеспечивает очень надежную и простую конструкцию, однако в нормальных условиях она не обеспечивает очень высокий КПД и поэтому предлагались альтернативные движительные установки с целью преодоления этих недостатков.
Механизмы типа, упомянутого во вступлении, предлагались как альтернатива движительной установке с вращающимся гребным винтом для получения различных преимуществ, таких как увеличенная эффективность и сниженный шум.
Патент US 5401196 (TRIANTAFYLLOU), в частности, раскрывает такую движительную установку, в которой расположены один или более плавниковых движителей, которыми манипулируют, чтобы обеспечить движение в выбранном направлении хода. Плавником манипулируют при помощи совместного использования механизма перемещения в вертикальной плоскости и механизма колебаний относительно поперечной оси, при этом механизм перемещения в вертикальной плоскости генерирует колебания плавникового движителя в направлении по существу поперечном выбранному, а механизм колебаний относительно поперечной оси производит маховое движение плавника относительно шарнира для изменения его угла дифферента относительно того же направления хода.
Согласно патенту US 5401196 (TRIANTAFYLLOU) значительное увеличение тягового КПД можно получить, используя эту установку в отношении обеспеченных традиционными движительными установками с вращающимся гребным винтом. Такой увеличенный КПД обеспечивается оптимизацией объединенного перемещения механизма перемещения в вертикальной плоскости и механизма колебаний относительно поперечной оси, так что плавниками манипулируют, чтобы они перемещались по схеме, очень похожей на перемещение плавника рыбы.
Если даже плавниковые движительные устройства, подобные предлагаемому патентом US 5401196 (TRIANTAFYLLOU), предлагаются для значительного увеличения КПД, такие установки не имеют широкого коммерческого применения для приведения в движение, например, благодаря сложности механизма плавникового движителя, и особенно для приведения в движение морских судов. Следовательно, потребность в дополнительном развитии таких плавниковых движительных установок сохраняется.
В FR 1330218 A (BOUIGES) описывается водный велосипед, приводимый в движение при помощи поступательно перемещаемых плавников, где механизм поступательного перемещения или перемещения в вертикальной плоскости, включающий в себя механизм колебаний относительно поперечной оси, закреплены на одном коленчатом кривошипе. Этот механизм, работающий в ограниченной симметрии, подвержен воздействию окружающей среды и, дополнительно, механизм частично погружен ниже ватерлинии.
В DE 2849027 A1 (KRAUS HELMUT) описывается универсальный плавниковый приводной механизм, действующий при помощи плавника, расположенного или горизонтально или вертикально.
В DE 102004004236 A1 (KLUDSZUWEIT ALFRED) описывается движительная установка для лодки, содержащая каркас, колеблющий лопасть, имеющую два параллельных продольных элемента, параллельных оси лодки. Лопасти перемещаются в продольном направлении и не совпадают по фазе, а их концы соединены качающейся серьгой. Передняя серьга имеет рычаг, который может быть соединен с двигателем, а задняя серьга параллельных продольных элементов соединена с гребной лопаткой промежуточным звеном. Промежуточное звено и гребная лопатка могут быть гибкими или могут быть предусмотрен шарнир с пружиной, позволяющей перемещать промежуточную серьгу по углу.
WO 03/026954 A1, опубликовано 3 апреля 2003 (Inocean) предлагает установку, использующую синусоидальную схему перемещения для привода в движение или рекуперации энергии. Установка содержит множество жестких элементов корпуса судна, расположенных в ряд и закрепленных с возможностью поворачиваться друг к другу для поворота относительно параллельных осей вращения поперек продольного размера ряда элементов корпуса судна. Установка дополнительно содержит перемещающие устройства для поворота элементов корпуса судна относительно друг друга или перемещающие устройства для рекуперации энергии в результате поворота элементов корпуса судна относительно друг друга.
WO 2006/038808 A1, опубликовано 13 апреля 2006 (Clavis Biopropulsion) предлагает устройство, содержащее по меньшей мере один плавник, поступательно перемещаемый в поперечном направлении. Устройство заключает в себе запускающее и приводное средство, позволяющее по существу свободное колебательное движение плавника. Устройство запускается с помощью импульса, образованного приводным средством, каждый из такого множества циклов и пружин используют для сохранения пульсирующей энергии, обеспеченной приводным средством.
Сущность изобретения
Задача настоящего изобретения заключается в том, чтобы обеспечить надежную и простую по своей конструкции движительную установку и одновременно обеспечить вариант оптимизации установки, чтобы получить более высокий КПД, чем это возможно у традиционных двигателей с гребными винтами.
Согласно настоящему изобретению предлагается движительная установка, обеспечивающая приведение в движение в текучей среде и, особенно, для приведения в движение морского судна. Движительная установка содержит по меньшей мере один плавниковый движитель и средство для привода плавникового движителя.
Средство для привода плавникового движителя содержит коленчатый вал, механизм колебаний относительно поперечной оси для поворота плавникового движителя вокруг оси вала плавника и механизм перемещения в вертикальной плоскости для поступательного перемещения плавникового движителя в по существу поперечном направлении относительно продольной оси судна и в по существу поперечном в отношении оси вала плавника направлении, причем коленчатый вал приводит в движение и механизм колебаний относительно поперечной оси, и механизм перемещения в вертикальной плоскости.
Как механизмом перемещения в вертикальной плоскости, так и механизмом колебаний относительно поперечной оси управляют с помощью коленчатого вала, соединенного с механизмом перемещения в вертикальной плоскости и механизмом колебаний относительно поперечной оси одним коленом на коленчатом валу или отдельными коленами, имеющими по существу такой же радиус и угловое положение в отношении оси вращения коленчатого вала.
Вследствие этого, так как и механизм перемещения в вертикальной плоскости, и механизм колебаний относительно поперечной оси соединены с одним и тем же или по существу идентичным коленом или коленчатым валом, настоящее изобретение обеспечивает очень простую конструкцию объединенного механизма перемещения в вертикальной плоскости и механизма колебаний относительно поперечной оси и обеспечивает, с одной стороны, вариант конструкции, имеющей относительно небольшое количество компонентов, а с другой стороны, вариант оптимизации движительной установки для работы с более высоким КПД, чем тот, что обеспечен традиционной движительной установкой с гребным винтом, благодаря ее относительно симметричной схеме перемещения.
В предпочтительном варианте осуществления плавниковый движитель закреплен на каретке с помощью вала плавника, позволяя валу плавника и плавнику поворачиваться вокруг своей оси в отношении каретки. Каретка закреплена подвижно в отношении коленчатого вала, так что она может колебаться в направлении к и от коленчатого вала.
Механизм перемещения в вертикальной плоскости соединяет каретку с коленом коленчатого вала, а механизм колебаний относительно поперечной оси соединяет вал плавника с коленом коленчатого вала.
Изобретение особенно предпочтительно, если и механизм перемещения в вертикальной плоскости, и механизм колебаний относительно поперечной оси обеспечены, при помощи общей тяги управления, соединением на одном конце с коленом приводного вала, а на другом конце жестко прикреплены и продолжаются по существу поперек вала колебаний плавника, соединенного с кареткой с возможностью поворачиваться, так что тяга управления при повороте коленчатого вала вынуждает каретку совершать колебательные движения к и от коленчатого вала и в то же время вынуждает поворачивать вал колебаний плавника. Таким образом, количество отдельных компонентов снижено до только очень небольшого количества.
В альтернативном варианте осуществления механизм перемещения в вертикальной плоскости содержит паз в каретке и колено на коленчатом валу, подвижно расположенное в пазу, а механизм колебаний относительно поперечной оси содержит качающую тягу, соединенную на одном конце с валом плавника в по существу поперечном оси вала плавника направлении, а другим своим концом прикрепленную к колену на коленчатом валу, причем качающая тяга является телескопической или соединена с валом колебаний плавника или коленом с помощью скользящей втулки, так что качающая тяга компенсирует изменяемые размеры между валом плавника и коленом и, таким образом, когда коленчатый вал поворачивают, механизм перемещения в вертикальной плоскости вынуждает каретку совершать колебательные движения к и от коленчатого вала и одновременно механизм колебаний относительно поперечной оси вынуждает вал колебаний плавника совершать колебательные движения. Таким образом, силы, вызывающие перемещения в вертикальной плоскости, передаваемые плавникам, в первую очередь передаются механизмом перемещения в вертикальной плоскости механизмом, а силы, вызывающие колебания относительно поперечной оси, передаются механизмом колебаний относительно поперечной оси. При очень малых силах, вызывающих колебания относительно поперечной оси относительно сил, вызывающих перемещения в вертикальной плоскости, обеспечивается возможность более легкой конструкции механизма колебаний относительно поперечной оси.
В дополнительном варианте осуществления вал колебаний плавника и вал плавника являются одним и тем же, обеспечивая очень простую конструкцию, содержащую относительно небольшое количество отдельных компонентов.
В предпочтительном и альтернативном варианте осуществления механизм колебаний относительно поперечной оси содержит синхронизирующее звено, соединяющее вал колебаний плавника с валом плавника, причем указанное синхронизирующее звено служит для синхронизации поворота вала плавника с поворотом вала колебаний плавника. Это дает возможность соединить больше плавников с одним и тем же валом колебаний плавника и механизмом колебаний относительно поперечной оси, а также обеспечивает больше свободы, для адаптации положения плавников к специальным потребностям, например, адаптации размещения конструкции в ограниченном пространстве корпуса морского судна.
Тяга управления или качающая тяга, упомянутая выше, может быть жестко соединена с валом колебаний плавника, но в предпочтительном варианте осуществления соединение между тягой управления или качающей тягой и валом колебаний плавника содержит средство регулировки угла между валом колебаний плавника и тягой управления или качающей тягой. Таким образом, обеспечивают простой способ регулировки угла плавника для конкретных потребностей, таких как изменение требуемого направления тяги в случае поворота.
В очень простом и, следовательно, предпочтительном варианте осуществления вал плавника параллелен валу колебаний плавника.
Альтернативно, вал плавника предпочтительно может быть расположен по существу поперек вала колебаний плавника, что обеспечивает возможность приспособить конструкцию привода для конкретных потребностей, например, приспособить конструкцию для размещения в ограниченном пространстве корпуса морского судна.
В дополнительном предпочитаемом варианте осуществления движительная установка содержит два или более плавника, соединенных с одним и тем же валом колебаний плавника посредством одного синхронизирующего звена, так что количество отдельных компонентов сохраняется в относительно небольшом количестве.
Согласно другой задаче настоящего изобретения обеспечен способ привода в движение корабля с помощью движительного устройства согласно идеям данного изобретения.
Краткое описание чертежей
Фиг.1 представляет собой схематический вид сбоку корабля, содержащего плавниковую движительную установку по настоящему изобретению.
Фиг.2 представляет собой схематический вид сверху корабля, показанного на фиг.1.
Фиг.3 представляет собой детальный вид сбоку одного плавника движительной установки согласно фиг. 1 и 2.
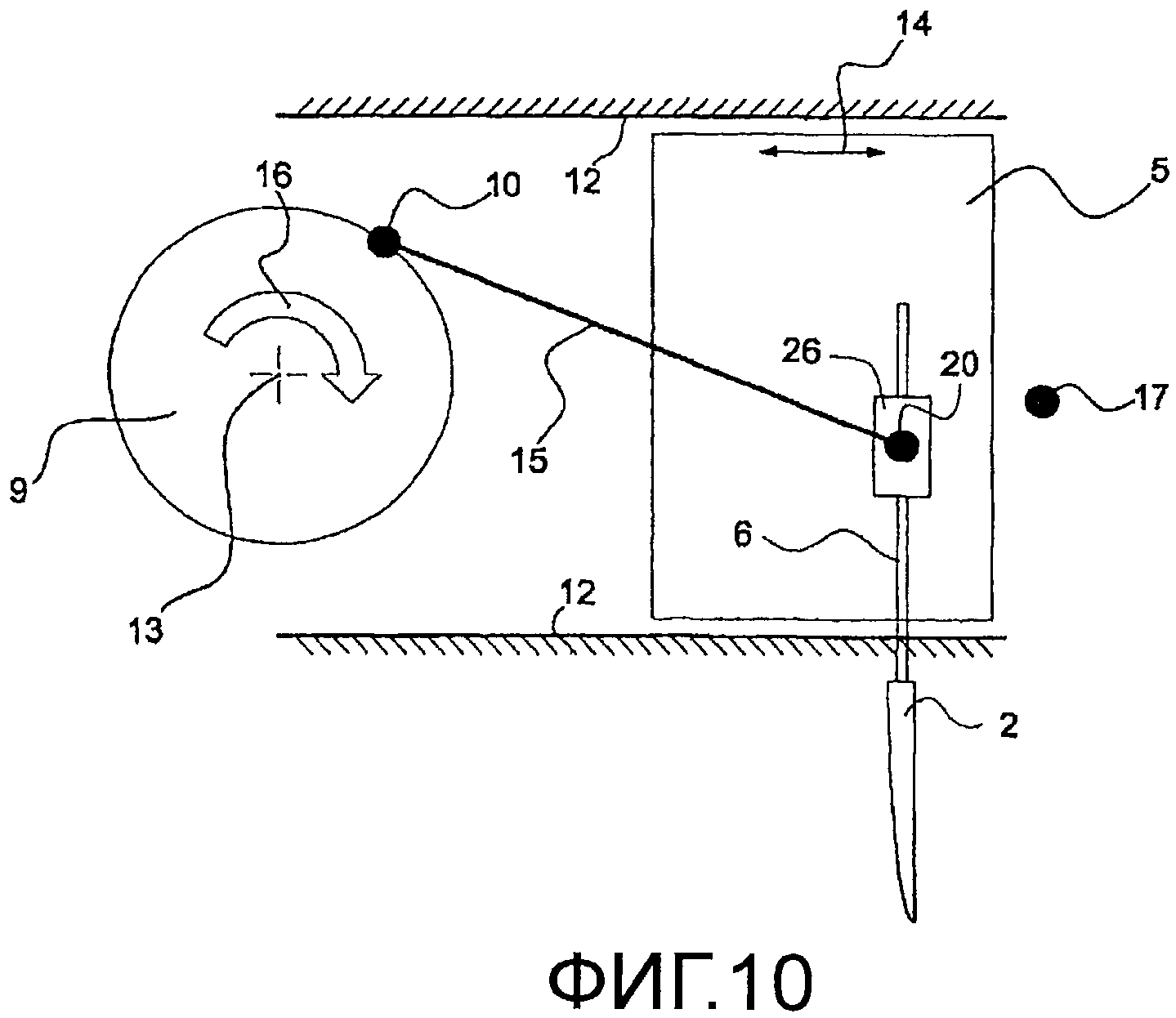
Фиг.4-10 представляют собой схемы, показывающие различные основные предпочитаемые варианты выполнения механических приводов для плавниковой движительной установки.
Подробное описание изобретения
На фиг.1 показан схематический вид сбоку корабля 1 с плавниками 2, обеспечивающими приведение в движение. Хорошо известно использование таких плавников в плавниковой движительной установке на корабле или любом другом морском судне, а также для приведения в движение в других целях. Основное описание плавниковой движительной установки раскрыто, в частности, в реферате по патенту US 5401196 (TRIANTAFYLLOU), включенного сюда путем ссылки.
На фиг.2 показана схема корабля на виде сверху согласно фиг.1, где установлены два комплекта из трех плавников 2, обеспечивающих движитель корабля 1. Без отхода от настоящего изобретения можно предложить приспособить для движителя, необходимого для конкретных судов, некоторое количество плавников 2 и некоторое количество комплектов плавников, но, как показано на этих чертежах, для погашения поперечных сил, действующих на корпус корабля во время движения, предпочтительно располагать плавники парами, работающими в противоположных фазах.
Согласно основным принципам плавникового движителя, например, как раскрыто в патенте US 5401196 (TRIANTAFYLLOU), рули 2 расположены так, что продолжаются из корабля в воду и в варианте осуществления, показывающем плавники 2, продолжаются из корпуса корабля 1 ниже ватерлинии 4 из отверстий 7 (фиг.3). Однако в других вариантах осуществления, не показанных на этих чертежах, плавники 2 могут, альтернативно, продолжаться из корабля в воду в любом месте над ватерлинией 4. Согласно фиг. 2 и 3 показано, что каждый из плавников 2 закреплен на каретке 5 посредством вала 6 плавника, проходящего из плавника 2 сквозь каретку 5, так что каждый плавник 2 может поворачиваться в каретке 5 вокруг вала 6 плавника. Каждая каретка 5 подвижно установлена на корпусе корабля 2 посредством ползуна, позволяющего каретке скользить и совершать возвратно-поступательное перемещение в направлении, по существу поперечном оси 8 симметрии корабля.
Как показано на фиг.2 каждая каретка может вмещать множество плавников 2.
Движительное воздействие на корабль можно получить объединенным перемещением совершающих возвратно-поступательное перемещение плавников 2 в поперечном оси симметрии корабля направлении и одновременным поворотом каждого плавника 2 вокруг его вала 6, а управление углом плавника, по сравнению с его поперечным перемещением в отношении оси 8 симметрии корабля, обеспечивает возможность бесшумного привода движения корабля и/или высокого КПД.
На фиг.3 подробно показан один плавник 2, продолжающийся из корпуса корабля 1 в воду. Как упомянуто выше, плавник 2 предпочтительного варианта осуществления изобретения расположен над ватерлинией 4 и, вследствие этого, каретка 5 содержит герметизирующую пластину или каретку 5, герметизирующую отверстие 7 в корпусе.
Согласно настоящему изобретению некоторое количество различных принципиальных вариантов выполнения систем привода для плавников 2 раскрыты во всех фиг.4-10.
Общее для всех этих вариантов состоит в том, что все они содержат коленчатый вал 9, поворачивающийся вокруг своей продольной оси 13, имеющий колено 10 для привода обоих приводных механизмов, приводного механизма перемещения в вертикальной плоскости и приводного механизма колебаний относительно поперечной оси, соответственно.
Колено 10 по настоящему изобретению может содержать одно колено или два по существу идентичных в отношении их углового положения колена и радиус в отношении центральной оси 13 коленчатого вала 9.
Согласно изобретению все другие варианты осуществления дополнительно содержат каретку 5, расположенную подвижно в ползунах 12 и по меньшей мере один плавник 2.
Движительное воздействие согласно показанным вариантам осуществления заставляет двигаться или приводит в движение корабль в направлении, показанном стрелкой или указателем 17.
На фиг.4 показана особенно простая и надежная конструкция движительной установки по настоящему изобретению, в которой и возвратно-поступательное перемещение 14 каретки 5, и колебание плавника 2 относительно поперечной оси обеспечены посредством одной тяги 15 управления, соединенной с одним концом колена 10 на коленчатом валу 9, а другим концом жестко соединенной с валом 6 плавника.
Когда коленчатый вал 9 поворачивают по стрелке 16, тяга 15 управления действует на каретку 5 подобно штоку поршня в традиционном двигателе внутреннего сгорания и одновременно поворачивает плавник 2 своим валом 6 плавника. Таким образом, и приводной механизм перемещения в вертикальной плоскости, и приводной механизм колебания относительно поперечной оси приводят в движение тягой управления.
На фиг.5 показан альтернативный вариант осуществления настоящего изобретения, где вместо тяги управления согласно фиг.4 расположена качающая тяга 18.
Качающая тяга 18 закреплена на колене 10 посредством скользящего соединения 19, позволяющего ей при повороте коленчатого вала 9 и колена 10 скользить в скользящем соединении 19. В этом варианте осуществления качающую тягу 18 приводит в движение только приводной механизм колебания относительно поперечной оси и, вследствие этого, создает колебание плавника 2 относительно поперечной оси благодаря своему жесткому соединению с осью 6 плавника.
Приводной механизм перемещения в вертикальной плоскости в этом варианте осуществления обеспечен пазом 21, подвижно соединенным с коленом 10, так что при повороте коленчатого вала 9 каретка совершает возвратно-поступательное перемещение, как показано стрелкой 14.
На всех фиг.6-8 показан один и тот же главный приводной механизм, показанный на фиг.5, но в этих альтернативных вариантах положение плавника 2 и/или некоторого количества плавников 2 можно видоизменить без изменения конструкции приводного механизма перемещения в вертикальной плоскости и механизма привода колебаний относительно поперечной оси так, чтобы качающая тяга 18, жестко соединенная с валом колебаний 20, вызывала поворот вала 6 плавника и, вследствие этого плавника 2, синхронизирующими звеньями 22, 23.
Подбором длины звеньев 22, 23 можно получить зацепление для конкретных целей.
Принцип добавления синхронизирующих звеньев 22, 23 к механизму привода колебаний относительно поперечной оси можно также, без отхода от настоящего изобретения, использовать в варианте осуществления, показанном на фиг.4, и с тем же результатом.
На фиг.9 показан дополнительный вариант осуществления настоящего изобретения, в котором угловые вертикальный и колебательный приводы такие же, как показанный на фиг.4, но при этом угол между плавником 2 и тягой управления 15 можно отрегулировать при помощи линейного двигателя 24, например, гидравлического поршня, расположенного между тягой управления 15 и качающей тягой 25, жестко соединенной с валом 6 плавника. Очевидно, что также возможно приспособить эту конструкцию к вариантам осуществления, упомянутым выше, включением качающей тяги 25 вместо тяги 15 управления. Таким образом, угол между плавником или плавниками 2 и качающей тягой или тягой управления можно оптимизировать для конкретных целей и особенно так, чтобы расположить плавник или рули 2 параллельно движению каретки 5, для того чтобы не получить значительного движительного воздействия.
Специалисту очевидно, что для регулировки углового положения плавников 2 относительно угла тяги 15 управления или качающей тяги 25 возможны другие альтернативные варианты.
На фиг.10 показан другой альтернативный вариант осуществления настоящего изобретения, в котором зацепление 26 выполнено между валом 6 плавника и валом колебаний 20 плавника, что позволяет плавнику 2 проходить под углом в отношении вала 20 колебаний плавника. В силу этого, зацепление можно выполнить в различных вариантах осуществления, фиг.10 только раскрывает зацепление как закрытый редуктор. На фиг.10 показано, что вал 6 плавника расположен поперек вала 20 колебаний плавника, но очевидно, что зацепления могут быть выполнены для того, чтобы обеспечить другие углы между валом 6 плавника и валом 20 колебаний плавника. В этом варианте осуществления направление скорости 17 отличается от показанного на фиг.4-9.
В приведенном выше описании настоящее изобретение описано с учетом его движительного воздействия. Однако специалистам очевидно, что любая плавниковая движительная установка и, вследствие этого, также плавниковая движительная установка согласно изобретению может быть использована для генерирования тяги. Так происходит потому, что при заданной скорости течения/корабля, устройство будет работать как генератор ниже критической скорости коленчатого вала и как движитель выше критической скорости коленчатого вала. Что обеспечивает возможность системе генерировать тягу.
Кроме того, направление вертикальной качки может быть любым направлением, включающим горизонтальное направление (как рыба) и вертикальное (как дельфин), если только оно находится под значительным углом к основному заданному направлению тяги, при этом перпендикуляр немного лучше. Ось наклона должна иметь большой угол в обоих упомянутых направлениях, при этом перпендикуляр немного лучше.
Реферат
Изобретение относится к движительным установкам для судов. Плавниковое движительное устройство содержит, по меньшей мере, один плавник, средство для привода указанного плавника. Движительное устройство установлено внутри корпуса морского судна. Плавник перемещается поступательно в поперечном направлении и прикреплен к валу плавника. Средство для привода плавника содержит коленчатый вал, механизм колебаний относительно поперечной оси для поворота плавника вокруг оси вала плавника и механизм перемещения в вертикальной плоскости для поступательного перемещения плавника в поперечном направлении относительно оси вала плавника и судна. Коленчатый вал приводит в движение механизм колебаний относительно поперечной оси и механизм перемещения в вертикальной плоскости. Механизм перемещения в вертикальной плоскости и механизм колебаний относительно поперечной оси соединены с одним коленом на коленчатом валу или с двумя отдельными коленами, имеющими одинаковый радиус и угловое положение в отношении оси вращения коленчатого вала. Достигается надежность и простота конструкции и повышение КПД. 2 н. и 9 з.п. ф-лы, 10 ил.
Комментарии