Устройство для распознавания фаз газораспределения - RU2230210C2
Код документа: RU2230210C2
Чертежи





Описание
Настоящее изобретение относится к устройству для распознавания фаз газораспределения в двигателе внутреннего сгорания (ДВС), имеющем коленчатый вал, угловое положение которого непрерывно определяется путем обработки поступающих от датчика положения коленчатого вала сигналов в блоке управления, который в зависимости от углового положения вала выдает командные импульсы на впрыскивание топлива и на зажигание и который для распознавания фазы газораспределения после пуска двигателя воздействует на впрыскивание и анализирует устанавливающиеся в результате этого воздействия изменения частоты вращения вала двигателя, при этом для заданных цилиндров отключается впрыскивание, в результате чего в них не происходит впрыскивания топлива, и выходной сигнал датчика положения коленчатого вала контролируется на появление ожидаемой в ответ на такое отключение впрыскивания реакции.
В многоцилиндровом двигателе внутреннего сгорания, имеющем коленчатый вал и по меньшей мере один распределительный вал, блок управления в зависимости от распознанного положения коленчатого и распределительного валов вычисляет, когда и в какой цилиндр следует впрыскивать топливо и в какой момент времени должно произойти зажигание. При этом угловое положение коленчатого вала обычно определяется с помощью датчика, который измеряет поворот коленчатого вала, соответственно, соединенного с ним диска, имеющего характерную поверхность.
Поскольку коленчатый вал за один рабочий цикл ДВС совершает два оборота, одним только определением угла поворота этого коленчатого вала невозможно однозначно определить фазу газораспределения в ДВС. Поэтому для однозначного распознавания текущей фазы газораспределения обычно используют второй датчик, который измеряет поворот соединенного с распределительным валом задающего диска, на поверхности которого имеется контрольная метка. Поскольку распределительный вал за один рабочий цикл ДВС совершает всего один оборот, блок управления на основании комбинации сигналов, поступающих от датчиков положения коленчатого вала и распределительного вала, может определить однозначную взаимосвязь между ними и предпринять так называемую синхронизацию.
В тех системах, где не предусмотрен датчик положения распределительного вала, соответственно датчик фаз газораспределения, необходимо принятие дополнительных мер, которые позволили бы на основании одного только сигнала, поступающего от датчика положения коленчатого вала, обеспечить возможность синхронизации. Система, в которой фазы газораспределения определяются без использования соответствующего датчика фаз газораспределения, известна из DE-OS 4418577. В этой известной системе момент начала впрыскивания, рассчитываемый для отдельных цилиндров по угловому положению коленчатого вала, называемому также углом опережения впрыскивания, целенаправленно изменяют таким образом, чтобы при переходе от одного рабочего цикла к следующему при несоответствии фаз газораспределения требуемым происходило изменение частоты вращения, распознаваемое путем обработки сигналов, поступающих от датчика положения коленчатого вала. Это изменение частоты вращения, распознаваемое и анализируемое в блоке управления, используется для определения и последующей синхронизации фаз газораспределения.
Однако подобная система не обеспечивает надежное и безотказное определение фаз газораспределения.
В основу настоящего изобретения была положена задача разработать устройство для распознавания фаз газораспределения указанного в начале описания типа, которое позволяло бы осуществлять синхронизацию без использования датчика положения распределительного вала и без использования дополнительных деталей и элементов.
Эта задача решается согласно изобретению благодаря тому что впрыскивание топлива отключается после установления факта пуска двигателя в том диапазоне, в котором частота вращения снижается, причем этот диапазон соответствует нисходящей ветви характеристики пускового выброса при перерегулировании.
Преимущество предлагаемого в изобретении устройства состоит в возможности осуществления синхронизации без использования датчика положения распределительного вала и без использования дополнительных деталей и элементов, а также в возможности надежного и безотказного определения фаз газораспределения, при этом при установлении несоответствия фазы газораспределения требуемой возможна ее коррекция, соответственно, повторная синхронизация. Указанное преимущество достигается, в частности, благодаря тому что с помощью предлагаемого в изобретении устройства для распознавания фаз газораспределения зависящий от частоты вращения выходной сигнал датчика положения коленчатого вала контролируется на предмет того, приводит ли отключение впрыскивания топлива в заданные цилиндры к обусловленному этим изменению частоты вращения, соответственно к так называемому провалу в кривой частоты вращения или резкой посадке частоты вращения. На основании распознанного изменения частоты вращения можно определить, соответствует ли принятое угловое положение, характеризующее фазы газораспределения, требуемому или нет. В зависимости от этого может быть предпринята окончательная синхронизация.
Согласно одному из предпочтительных вариантов выполнения предлагаемого в изобретении устройства на основании выходного сигнала датчика положения коленчатого вала определяются интервалы времени поворота на определенный угловой сегмент, при этом указанный сегмент имеет заданную угловую протяженность, а время поворота на сегмент задается таким образом, чтобы коленчатый вал поворачивался за это время на один сегмент, и сравнением выбранных интервалов времени поворота на сегмент распознается пропуск зажигания, используемый для распознавания фаз газораспределения.
В этом случае предпочтительно определять разность между заданными интервалами времени поворота на сегмент, сравнивать полученную разность с заданным или согласованным минимальным значением и распознавать пропуск воспламенения в том случае, если полученная разность оказывается больше минимального значения.
Обнаруженный пропуск воспламенения предпочтительно соотносить с помощью счетчика цилиндров с соответствующей фазой газораспределения, а обнаруженные пропуски воспламенения суммировать в каждом случае с помощью счетчика, характеризуя фазу газораспределения как соответствующую требуемой или нет.
Согласно еще одному предпочтительному варианту выполнения предлагаемого в изобретении устройства при обнаружении неправильной синхронизации осуществляется изменение синхронизации с ее смещением на 360° угла поворота коленчатого вала.
В соответствии еще с одним предпочтительным вариантом выполнения предлагаемого в изобретении устройства на основании выходного сигнала датчика положения коленчатого вала определяется частота вращения, при этом определение частоты вращения в каждом случае осуществляется на основании времени поворота на сегмент.
Ниже изобретение более подробно рассмотрено на примере одного из вариантов его выполнения со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схематичное изображение компонентов системы управления двигателем внутреннего сгорания, необходимых для пояснения сущности изобретения, и
на фиг.2-5 - временные диаграммы изменения существенных для изобретения параметров, соответственно, управляющих сигналов.
В показанной на фиг.1 системе управления двигателем внутреннего сгорания (ДВС) позицией 10 обозначен задающий диск, жестко соединенный с коленчатым валом 11 ДВС и имеющий по периметру множество одинаковых угловых меток 12. Помимо этих одинаковых угловых меток 12 на диске имеется контрольная метка 13, образованная, например, пропуском двух угловых меток. Общее количество угловых меток составляет, например, 60-2.
Угловое положение задающего диска 10 определяется датчиком 14, сигналы с выхода которого поступают в блок 15 управления, которые после их обработки преобразуются в сигналы прямоугольной формы, воспроизводящие форму рабочей поверхности задающего диска 10.
Имеющийся в обычных ДВС датчик фаз газораспределения, который определяет угловое положение распределительного вала 16, соответственно соединенного с распределительным валом 16 диска с метками, в данном случае не предусмотрен. Информацию о характеризующем фазу газораспределения угловом положении, которую обычно получают на основании выходного сигнала подобного датчика, получают при этом описанным ниже образом.
На различные входы блока 15 управления поступают другие входные сигналы, характеризующие необходимые для управления, соответственно, регулирования ДВС параметры. Соответствующие датчики обозначены общей позицией 17. На еще один вход блока управления поступает сигнал "зажигание включено", который при включении выключателя 18 зажигания поступает с клеммы KL 15 замка-выключателя зажигания. Блок 15 управления, в котором имеются по меньшей мере центральный процессор 28 и память 19, в результате выполняемых им вычислений формирует соответствующие сигналы, управляющие зажиганием и впрыскиванием, и выдает эти сигналы на выходы 20 и 21. Электрическое напряжение на блок 15 управления подается обычным образом от аккумуляторной батареи 22, подключаемой через выключатель 23.
Описанное выше устройство, показанное на фиг.1, позволяет в любой момент времени определить угловое положение коленчатого вала 11 в процессе работы ДВС. Поскольку взаимосвязь между угловыми положениями коленчатого вала и распределительного вала известна так же хорошо, как и взаимосвязь между угловым положением распределительного вала и положением поршней отдельных цилиндров, после определения положения контрольной метки можно произвести синхронизацию, но лишь в том случае, если имеется сигнал, характеризующий фазу газораспределения, называемую также фазным углом.
Такой характеризующий фазный угол сигнал необходим постольку, поскольку выдаваемый датчиком положения коленчатого вала сигнал, характеризующий положение контрольной метки, является неоднозначным по той причине, что коленчатый вал за один рабочий цикл ДВС совершает два оборота, тогда как распределительный вал совершает только один оборот.
С той целью, чтобы в системе, не имеющей датчика фаз газораспределения, можно было определить фазный угол и произвести последовательное впрыскивание топлива, блок управления выполняет следующие операции.
После установления факта пуска ДВС осуществляется обработка устанавливающихся сигналов от датчика положения коленчатого вала. При первом обнаружении контрольной метки процесс последовательного впрыскивания начинается с этой первой контрольной метки. Поскольку еще не известно, на какой именно стадии вращения находится коленчатый вал, угол поворота коленчатого вала, соответствующий опережению впрыскивания, либо соответствует, либо не соответствует требуемому, отличаясь от него на 360° угла поворота коленчатого вала. Для определения фазы газораспределения после пуска ДВС впрыскивание в один из цилиндров блокируют, соответственно отключают. При этом впрыскивание отключается примерно на три рабочих цикла ДВС в нисходящей ветви характеристики пускового выброса при перерегулировании. Под нисходящей ветвью характеристики пускового выброса при перерегулировании пдразумевается снижение частоты вращения. Если фазный угол однозначно определить невозможно, то по истечении короткого промежутка времени ожидания впрыскивание повторно отключается на холостом ходу.
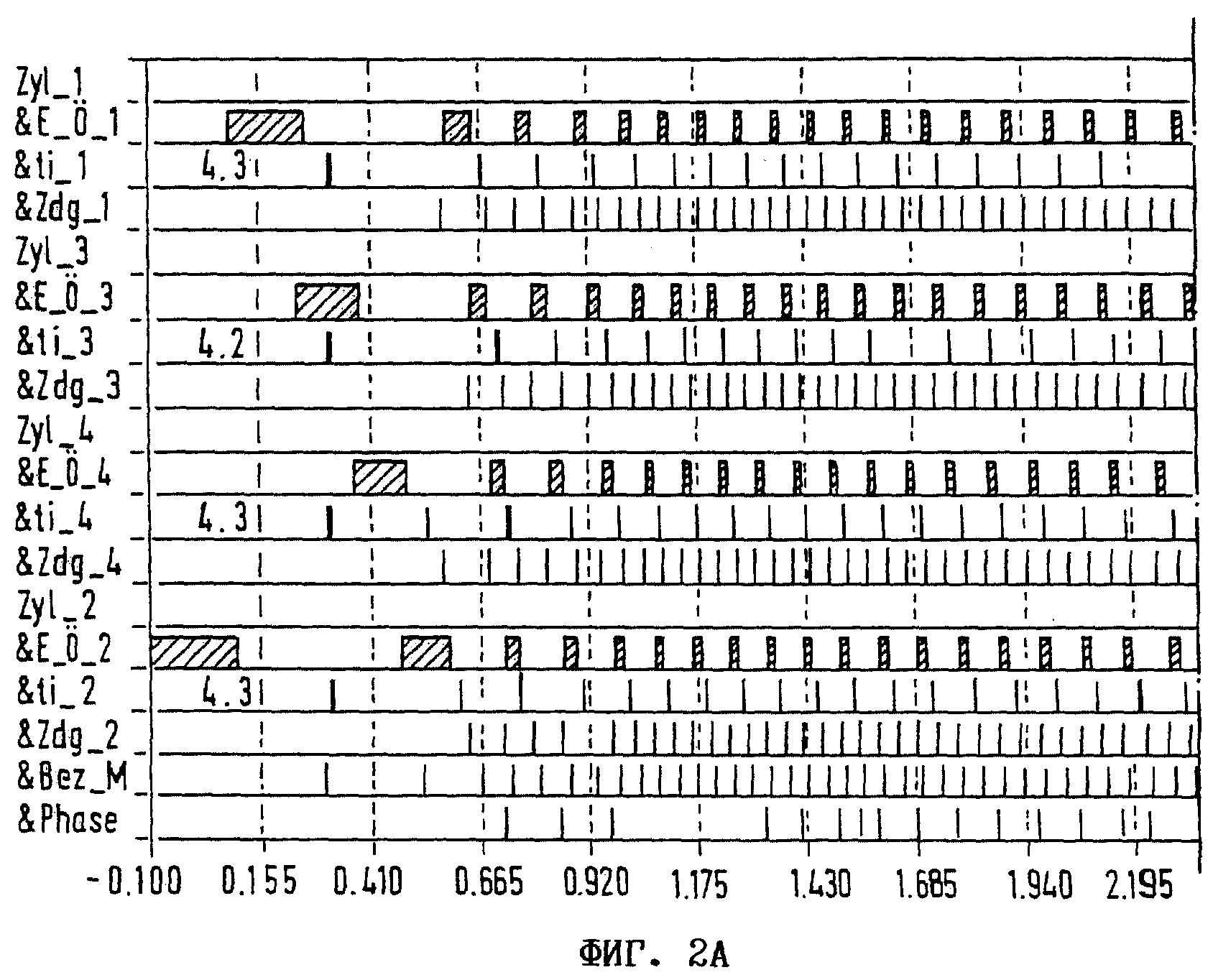
В период отключения впрыскивания длительностью до двух оборотов коленчатого вала после последнего отключения впрыскивания осуществляется контроль за временем поворота коленчатого вала на особые угловые сегменты. При этом сегменты, время поворота на которые контролируют, определяют таким образом, чтобы они, если рассматривать круговую диаграмму, в виде которой можно представить фазы газораспределения, располагались примерно симметрично относительно точки, которой определяется положение поршня ДВС, соответствующее моменту зажигания, при этом положение такого сегмента необходимо особо задавать для каждого двигателя. Длина сегмента рассчитывается как отношение 720° угла поворота коленчатого вала к числу цилиндров, а сам сегмент охватывает определенное количество угловых меток, соответственно фронтов сигналов. Поскольку определяется время, за которое коленчатый вал поворачивается на один сегмент, характеристика, по которой анализируется частота вращения вала двигателя, принимает в результате вид характеристики фильтра нижних частот. При этом формируется среднее значение по нескольким угловым меткам, соответственно по нескольким фронтам сигналов. Положение сегмента следует выбирать таким образом, чтобы нарастание характеристики времени поворота на сегмент в результате отключения зажигания в цилиндре, т.е. нарастание временной характеристики, обусловленное отсутствием воспламенения топлива, приходилось на половину сегмента. Благодаря этому обеспечивается максимально возможное отношение сигнал/шум, уменьшающее помехи, вносимые последующим сегментом.
Для определения так называемого провала в кривой частоты вращения или резкой посадки частоты вращения после отключения впрыскивания всегда анализируют лишь те интервалы времени поворота на сегмент, в которые может проявиться влияние отключения впрыскивания. Так, например, в четырехцилиндровом ДВС отключают впрыскивание в 1-й цилиндр и анализируют время поворота на сегмент, расположенный вокруг точки, которой определяется положение, соответствующее моменту зажигания во 2-м и 4-м цилиндрах. Для двигателя с четным числом цилиндров это означает, что интервалы времени поворота каждый раз определяют по одному и тому же сегменту механического устройства, т.е. каждый раз между одними и теми же угловыми метками. В результате возможно имеющиеся у задающего диска отклонения от номинальных размеров, определяемые производственными допусками, не оказывают никакого влияния на анализ информации, характеризующей частоту вращения.
Определив для 2-го и 4-го цилиндров разность между их интервалами времени поворота на определенный сегмент при отключенном 1-м цилиндре, можно вычислить динамическую величину, которая должна превышать заданное абсолютное значение, чтобы можно было зарегистрировать пропуск вспышек в соответствующем цилиндре. Эту величину для четырехцилиндрового ДВС рассчитывают следующим образом:
dts(k)=ts(k)-ts(k-2),
где ts означает время поворота на сегмент, a dts означает динамическую величину.
Дополнительно к определению разности между обоими интервалами времени поворота на сегмент можно вычислить и разность между двумя последними динамическими величинами. В результате эта разность должна представлять собой абсолютное значение, рассчитываемое следующим образом:
Ddts=dts(k)-dts(k-2).
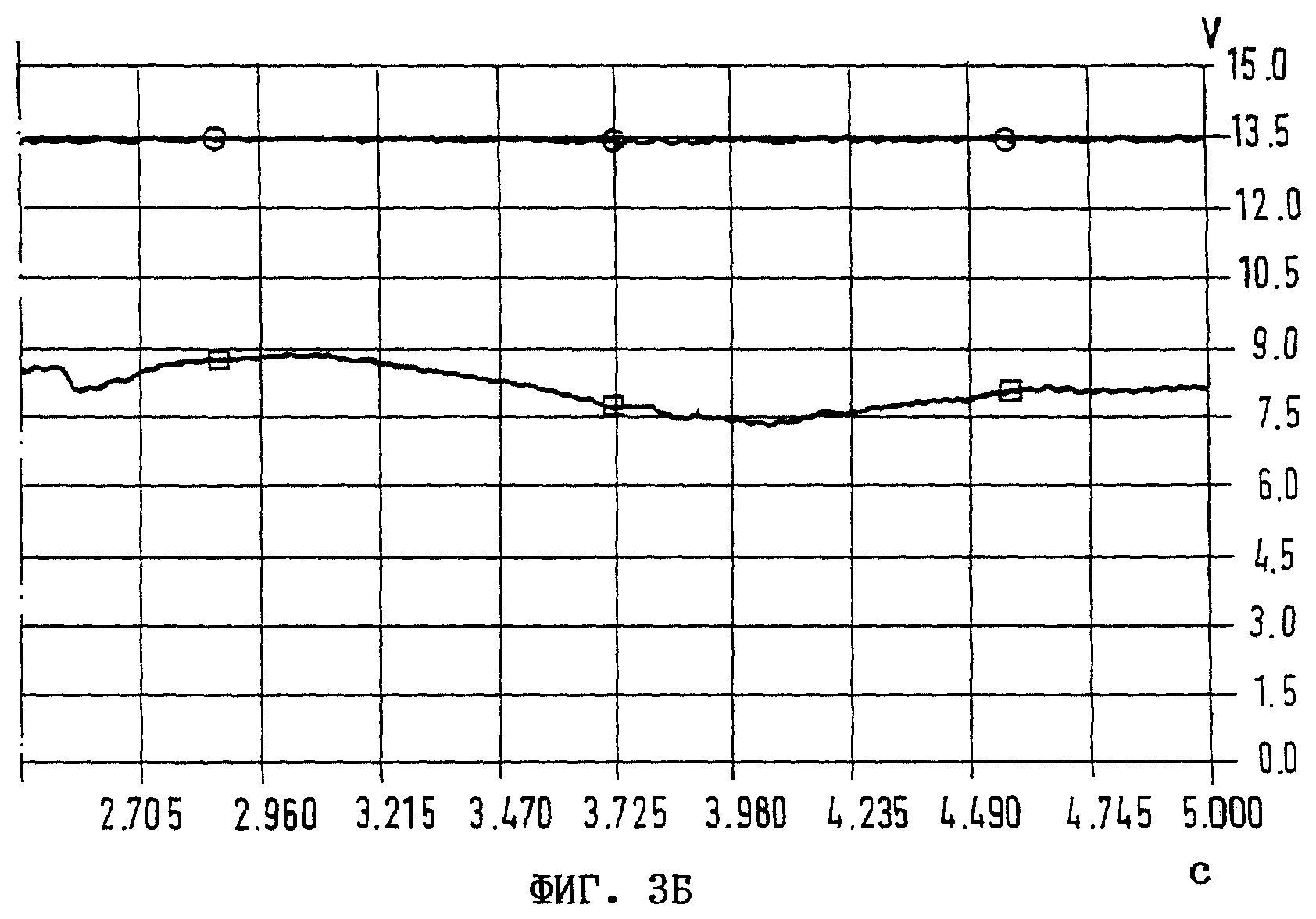
Влияние частоты вращения можно не учитывать, поскольку впрыскивание отключается лишь в небольшом интервале изменения частоты вращения. Для успешного нахождения фазы газораспределения необходимо определить, например, количество пропущенных для одного цилиндра впрыскиваний минус одно. Так, например, успешным определение фаз газораспределения можно признать в том случае, когда при трех пропусках впрыскивания дважды будет корректно распознана установившаяся резкая посадка частоты вращения. Кроме того, отсутствие распознаваемого пропуска вспышек в другом цилиндре может служить еще одним условием, по которому процесс определения фаз газораспределения может считаться успешным и быть завершен. Если в результате определения фаз газораспределения будет установлено несовпадение синхронизации на 360° угла поворота коленчатого вала, то синхронизацию изменяют с учетом такого несовпадения на обратную.
На фиг.2 и 3 в качестве примера, в котором несовпадение фазы газораспределения на 360° угла поворота коленчатого вала потребовало изменить синхронизацию, показаны временные диаграммы, на которых отображены следующие изменяющиеся в зависимости от времени параметры: "Открытие впускного клапана"


Реферат
Изобретение относится к устройству для распознавания фаз газораспределения в двигателе внутреннего сгорания. Технический результат заключается в возможности создания устройства для распознавания фаз газораспределения, которое позволяло бы осуществлять синхронизацию без использования датчика положения распределительного вала и без использования дополнительных деталей и элементов. Устройство для распознавания фаз газораспределения предназначено для двигателя внутреннего сгорания, имеющего коленчатый вал, угловое положение которого непрерывно определяется путем обработки поступающих от датчика положения коленчатого вала сигналов в блоке управления, который в зависимости от углового положения вала выдает командные импульсы на впрыскивание топлива и на зажигание. Для распознавания фазы газораспределения после пуска двигателя блок управления воздействует на впрыскивание и анализирует устанавливающиеся в результате этого воздействия изменения частоты вращения вала двигателя. При этом для заданных цилиндров отключается впрыскивание, в результате чего в них не происходит впрыскивания топлива, и выходной сигнал датчика положения коленчатого вала контролируется на появление ожидаемой в ответ на такое отключение впрыскивания реакции. Впрыскивание топлива отключается после установления факта пуска двигателя в том диапазоне, в котором частота вращения снижается, причем этот диапазон соответствует нисходящей ветви характеристики пускового выброса при перерегулировании. 5 з.п. ф-лы, 9 ил.

Формула
Документы, цитированные в отчёте о поиске
Датчиковая установка для распознавания цилиндров в двигателе внутреннего сгорания с n цилиндрами и система для ее применения
Комментарии