Датчиковая установка для распознавания цилиндров в двигателе внутреннего сгорания с n цилиндрами и система для ее применения - RU2104404C1
Код документа: RU2104404C1
Чертежи

Описание
Изобретение относится к датчиковой установке для распознавания цилиндров в двигателе внутреннего сгорания с n цилиндрами, согласно главному пункту формулы изобретения.
Известно, что у четырехтактного двигателя внутреннего сгорания коленчатый вал дважды поворачивается за рабочий цикл и, следовательно, покрывает угол в 720o, прежде чем определенный цилиндр снова займет то же самое рабочее положение. Поэтому для определения мгновенной позиции цилиндра недостаточно определения углового положения коленчатого вала во время вращения, напротив, необходимо знать, находится ли двигатель внутреннего сгорания в первой или второй половине рабочего цикла, соответственно при первом или втором повороте коленвала.
Известно, например [1], что для этого наряду с датчиком коленвала предусматривается еще статический датчик распределительного вала, выходной периодический сигнал которого состоит из двух различных частичных сигналов, попеременно распространяющихся за каждый полный поворот коленного вала. Датчик коленвала дополнительно подает опорный сигнал, зависящий от коленвала, с помощью которого определяется известное положение угла, положение синхронизации. Только после распознавания опорного импульса в связи с сигналом распределительного вала точно известно положение цилиндров двигателя внутреннего сгорания и может последовать синхронизация зажигания или впрыска.
Вследствие этого после запуска двигателя внутреннего сгорания в неблагоприятном случае можно потерять полный оборот коленвала до достижения в первый раз положения синхронизации. Поскольку только после синхронизации возможен ритмичный впрыск топлива в отдельный цилиндры, в известных способах во избежание удлиненной пусковой фазы за счет отсутствующего впрыскивания во время первого поворота коленвала определяется первая группа цилиндров, в которую, по оценке первого вспомогательного сигнала датчика распределительного вала, прежде всего производят впрыск после запуска. После изменения сигнала, подаваемого датчиком распределительного вала, производится впрыск и во вторую группу цилиндров.
Таким образом, известные способы указывают на возможность улучшения впрыска непосредственно после запуска двигателя внутреннего сгорания, при этом более быстрое распознавание цилиндров не достигается, да оно в этом случае и абсолютно не требуется.
Известно устройство [2] для регистрации положения, соотносимого с цилиндрами коленвала четырехтактного двигателя с числом цилиндров, в котором один из связанных с коленвалом датчиков сигналов разделен на n/2 равные маркировочные фазы сигнала с всегда опознаваемой меткой и связанный с распределительным валом датчик сигналов разделен на n/2 или n равные фазы сигнала, равномерные деления которых отличаются друг от друга.
В результате синхронизированного посредством опознаваемых меток сравнения импульсов обоих датчиков сигналов может сразу после запуска двигателя происходить координация цилиндров с положением коленвала. Недостаток этого устройства состоит в том, что интервал между аналогичными фронтами маркировочных углов датчика распределительного вала неоднороден, так что он не пригоден для использования в качестве запускающей с триггерной метки, что особенно невыгодно тогда, когда нужно реализовать аварийный ход при неисправном датчике коленчатого вала.
Преимущества изобретения.
Согласно изобретению установка из датчиков для распознавания цилиндров в двигателе внутреннего сгорания с цилиндрами с отличительными признаками основного пункта формулы изобретения в противоположность указанному имеет то преимущество, что непосредственно после запуска двигателя внутреннего сгорания происходит особенно быстрое и надежное распознавание цилиндров, так как сопряжение сигналов датчиков коленвала и распределительного вала вследствие выгодного выполнения диска распределительного вала приводит к однозначно идентифицируемой последовательности импульсов.
Немедленное распознавание цилиндров возможно преимущественным образом, так как последовательность импульсов датчика сигналов распределительного вала во время первого поворота коленвала однозначно отличается от последовательности импульсов во время второго поворота коленвала.
Особое выполнение диска датчика распределительного вала гарантирует, что появляется один из импульсных фронтов, например, задний фронт для всех маркировочных знаков с одинаковым интервалом, относящийся аварийный ход двигателя внутреннего сгорания в случае, когда датчик коленвала неисправлен.
Другие предпочтительные выполнения системы датчиков согласно изобретению указаны в подпунктах формулы изобретения.
На фиг. 1 дано общее представление о системе датчиков по изобретению; на фиг. 2 и 3 - диаграммы импульсов, как и могущие проявляться комбинации импульсов, причем фиг. 2 относится к шестицилиндровому двигателю, а фиг. 3 - к восьмицилиндровому; на фиг. 4 и 5 - диаграммы импульсов для пояснения функционирования аварийного хода.
На фиг. 1 представлен общий вид основных элементов настоящего изобретения в связи с регулированием двигателя внутреннего сгорания. При этом цифрой 10 обозначен диск датчика, который жестко связан с коленвалом 11 двигателя внутреннего сгорания и имеет на своей окружности большее число аналогичных угловых меток 12.
Наряду с этими аналогичными угловыми метками 12 предусмотрена базовая метка 13, которая в примере выполнения согласно фиг. 1 образована двумя непоказанными угловыми метками.
Второй диск 14 датчика связан с распределительным валом 15 двигателя внутреннего сгорания и имеет на своей окружности сегменты различной длины, причем более короткие обозначены цифрой 17, более длинные - 16. Между этими угловыми метками находятся промежутки, обозначенные соответственно более короткие 19 и более длинные 18.
Число сегментов 16, 17 выбрано таким образом, чтобы они как раз соответствовали числу цилиндров n, точное расположение сегментов описано в другом месте.
Оба диска датчиков 10, 24 считывают с чувствительных элементов 20, 21, например, индуктивных чувствительных элементов или сенсоров Холла; генерированные в чувствительных элементах при прохождении угловых меток сигналы подводятся к управляющему устройству 22 и там дальше обрабатываются.
Диск датчика 10 и чувствительный элемент 20 в дальнейшем обозначаются как датчик распределительного вала, диск 14 датчика и чувствительный элемент 21 - как датчик коленвала.
Управляющее устройство 22 получает через входы 23, 24, 25 дальнейшие, требуемые для управления двигателем внутреннего сгорания входные величины (параметры), в качестве примера выбраны температурный сигнал через вход 25, сигнал нагрузки через вход 24 и сигнал "зажигания 1" через вход 23 с принадлежащим ему включателем зажигания 26. С выходной стороны управляющее устройство выдает сигналы для системы зажигания и впрыска не обозначенных более подробно соответствующих компонентов двигателя внутреннего сгорания, выходы устройства управления обозначены как 27 и 28.
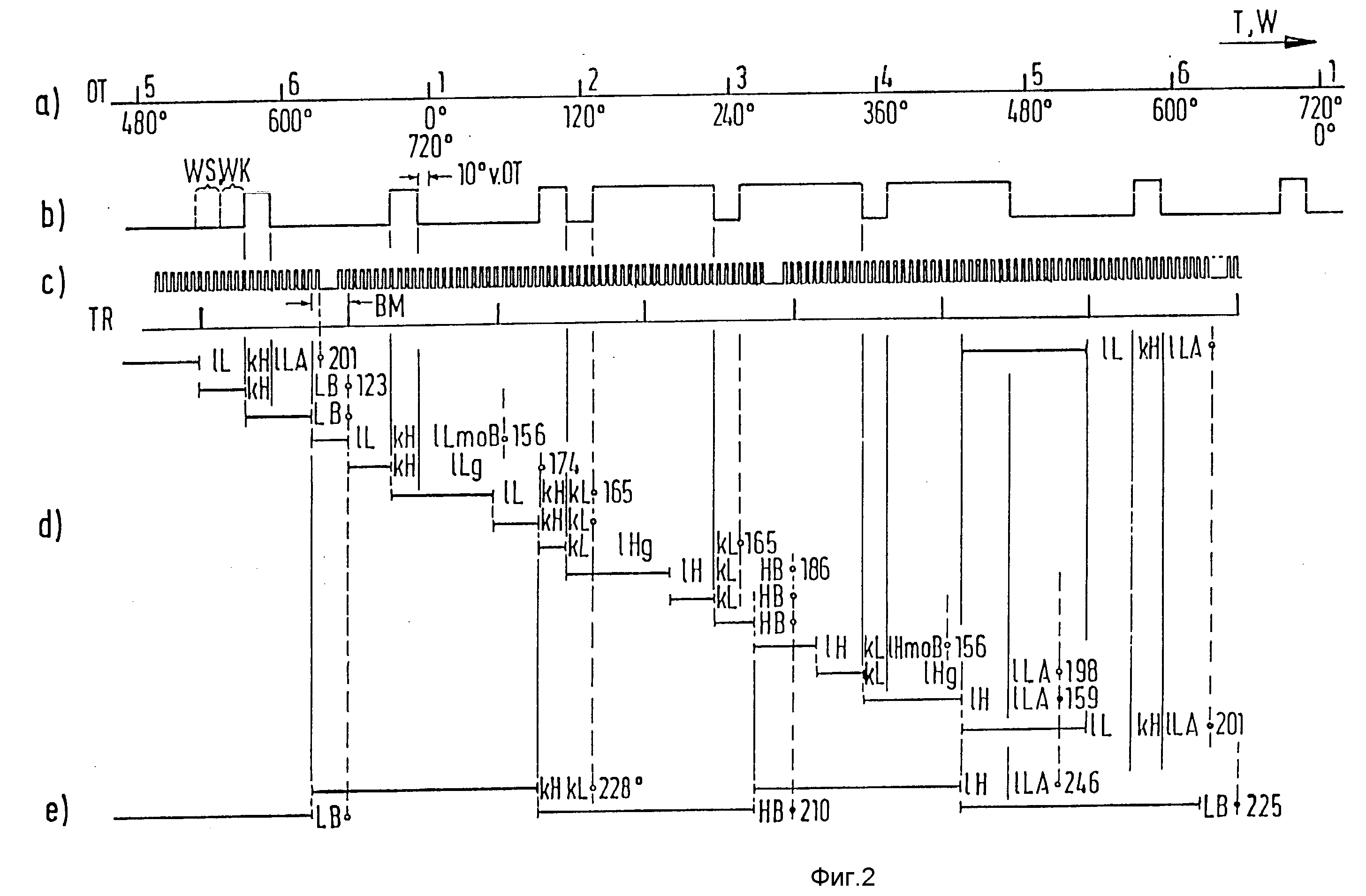
На фиг. 2 выдаваемые чувствительными элементами 20 и 21 сигналы, которые оцениваются устройством управления, нанесены для угла поворота коленвала как W и времени T.
В частности, на фиг. 2,а нанесены углы коленвала за два с половиной оборота коленвала, фиг. 2,b показывает сигнал чувствительного элемента распределительного вала и фиг. 2,с - сигнал чувствительного элемента коленвала 21.
Дополнительно нанесены еще ОТ-положение цилиндров 1-6 и TR-импульс, появляющийся у каждого положительного фронта сегмента.
Для того, чтобы получить зависимость представленных на фиг. 2 сигналов,
системе датчиков необходимо предъявить следующие требования:
Связанный с распределительным валом 15 диск 14 датчика выполнен таким образом, что сигнал датчика распределительного вала подает в
зазор зажигания в течение первого поворота коленвала двигателя внутреннего сгорания длинные и низкие и короткие высокие фазы, с отрицательным фронтом импульса в случае угла зажигания аварийного
хода.
Во время второго поворота должны подаваться длинные высокие и короткие низкие фазы, во всяком случае с отрицательным фронтом импульса в случае угла зажигания аварийного хода. Для этого диск датчика нужно выполнить таким образом, что на три длинных сегмента 16 каждый раз следует три коротких сегмента 17, причем между короткими сегментами соответственно следуют длинные промежутки 18, а между длинными сегментами 16 - соответственно короткие промежутки 19, и между короткими и длинными сегментами имеется короткий или длинный промежуток.
В случае, если это требуется из-за свойств, например, датчика Холла (слишком раннее включение у положительного и слишком позднее выключение у отрицательного фронта импульса), механические короткие сегменты диска датчика могут быть выполнены более маленькими, чем короткие промежутки, так что в электрическом сигнале короткие низкие и короткие высокие фазы будут примерно равной длины. Фиг. 3,b показывает это в принципе.
В остальном система датчиков выставляется таким образом, что в электрическом сигнале короткие высокие и низкие фазы должны быть по возможности короткими по отношению к длинным высоким и низким фазам.
Этим обеспечивается то, что в результате расчета времени как в случае динамического диапазона, так и при форсировании имеет место достаточное различие между коротким временем ТК и длинным временем TL.
Приведенный на фиг. 1 пример осуществления выполнен так, что в каждом случае задние фронты сигналов согласно фиг. 2,b или соответственно фиг. 3,b обнаруживают идентичные расстояния.
Диск датчика, в котором переставлены длины сегментов и промежутков, поставил бы передние фронты с равноотстоящими интервалами (эквидистантными).
Базовая метка 13 диска коленвала 10 расположена таким образом, что обусловленный ею интервал между импульсами появляется или внутри обусловленной средним данным промежутком низкой фазы сигнала датчика распределительного вала и обусловленной средний длинным сегментом высокой фазы сигнала датчика распределительного вала.
В качестве чувствительного элемента 21 распределительного вала может быть использован статический чувствительный элемент, который и в случае стоящего двигателя внутреннего сгорания выдает однозначное согласование сигнала, но также можно применять квазистатический датчик, а оценка может быть начата только после изменения фронта сигнала датчика распределительного вала.
Оценка нормального режима.
В нормальном режиме, с функционирующим датчиком коленвала и распределительного вала, после запуска у каждой боковой стороны зубца сигнала датчика коленвала опрашивается уровень сигнала датчика распределительного вала.
Одновременно в управляющем устройстве подсчитываются поданные датчиком коленвала боковые стороны (профили) зубцов.
Из количества профилей зубцов при одном уровне можно опознать по одному определенному углу W, идет ли речь о коротком или длинном сегменте или о коротком или длинном промежутке.
Если дополнительно учитывается еще надежность угла WS, длинный сегмент, например, может быть опознан по углу
W=WK+WS
В качестве параметра надежности угла имеет смысл
значение приблизительно 18o КW.
Если после перехода уровня от низкого к высокому внутри WK+WS появляется возобновленное изменение уровня, то речь идет о короткой высокой фазе, если у присутствующего низкого уровня внутри WK+WS не обнаруживается никакого изменения уровня, то речь идет о длинной низкой фазе.
Если проявляются оба этих случая, то опознается поворот 1 коленвала. Для поворота 2 логичен контроль обратной полярности.
Таким образом, уже по короткому угле WK+WS ясно, идет ли речь о первом или втором повороте. Поэтому уже по этому углу завершается распознавание группы цилиндров и возможен первый пусковой впрыск для выбранного цилиндра этой группы цилиндров.
Для распознавания цилиндров наряду с фазами сигнала датчика распределительного вала дополнительно еще исследовано появление базовой метки датчика коленвала. При этом исследовалось, проявляется ли базовая метка 13 при низком или высоком фазовых уровнях. Путем этого опроса реализуется уже по уровню техники распознавание цилиндров уже спустя 390o КW.
Для последующего пояснения ускоренного распознавания
цилиндров необходимо введение следующих обозначений для фаз:
lL: длинная низкая,
lH: длинная высокая,
KL: короткая низкая,
KH: короткая высокая,
LB: низкая
с базовой меткой,
HB: высокая с базовой меткой,
lLA: длинная низкая начало,
lLmoB: длинная низкая минимальная без базовой метки,
lHmoB: длинная высокая минимальная
без базовой метки,
lLg: целиком длинная низкая,
lLh: целиком длинная высокая.
Определенные таким образом фазы могут быть обнаружены каждый раз путем высчитывания определенного числа профилей зубцов коленвала от или до одного или между двумя фронтами импульсов распределительного вала. Оценивается столько следующих друг за другой фаз, пока не становится возможным однозначное согласование.
Если оценка начинается при угле коленвала примерно 480o (градусов), то в случае показанного примера выполнения появляется в качестве первой фазы длинная низкая (lL).
Следующей фазой является короткая высокая (kH), затем длинная низкая начало (lLA). В случае, отмеченном черным кружком, синхронизация завершается после угла поворота примерно 201o; числа возле черных точек или кружков в каждом случае указывают на наибольший угол, при котором синхронизация завершена.
Если в таком случае базовая метка всегда опознается, когда у сигнала по 2c за короткий промежуток следует один длинный и затем опять один короткий, то базовая метка опознана в месте BM фиг. 2,с.
Если начало поворота следует в другом положении, например, при около 550o, так что оценка начинается с первой короткой высокой фазы, то имеет место комбинация фаз, приведенная в ряду 2 фиг. 2,d короткая высокая, низкая с базовой меткой.
Соответствующие комбинации получаются для другого начала поворота или начала оценки, все эти комбинационные возможности приведены на фиг. 2, d.
Сравнение следующих друг за другом от начала поворота фаз с возможными комбинациями, заложенными в память управляющего устройства 22, дает возможность сделать однозначное согласование, так как ни одна из этих комбинаций не повторяется. В наихудшем случае регистрация KW - положения и цилиндровая координация возможна после примерно 200o KW. Для этого по временной точке опознанной фазовой последовательности для нахождения положения коленвала устанавливается на соответствующее значения текущего от 0o до 720o KW счетчик углов, являющийся составной частью управляющего устройства или вычислительного устройства.
У последующей системы впрыска, как это известно, например, из DE-OS 36 23 041, причем счетчик углов остановлен, по положению счетчика углов и в зависимости от охваченного числа оборотов и вычисленной продолжительности впрыска может последовать одновременно впрыск для клапанов, у которых окончание впрыска лежит самое позднее у желаемого угла соответствующего цикла, например, 30o KW "перед закрытием впуска". После этого следует нормальный одновременный впрыск.
Для повышения надежности распознавания цилиндров перед началом выдачи зажигания может последовать еще контроль вероятности, при котором после последующего распознавания цилиндров могут быть привлечены еще одна или две последующие фазы; возможны дальнейшие проверки надежности, в которых вычисляется число импульсов сигнала коленвала между базовой меткой и последующим положительным фронтом сигнала датчика распределительного вала.
Так как после последующего впрыска смесь сначала должна быть засосана и сжата, выдача зажигания может последовать насколько позже, после дополнительной проверки распознавания цилиндров, но без увеличения из-за этого продолжительности запуска.
Оценка с уменьшенным количеством фаз и несколько большей продолжительностью синхронизации также возможна. В частности, на фиг. 2,е приведен упрощенный способ, в котором оцениваются только четыре характеристические фазовые последовательности.
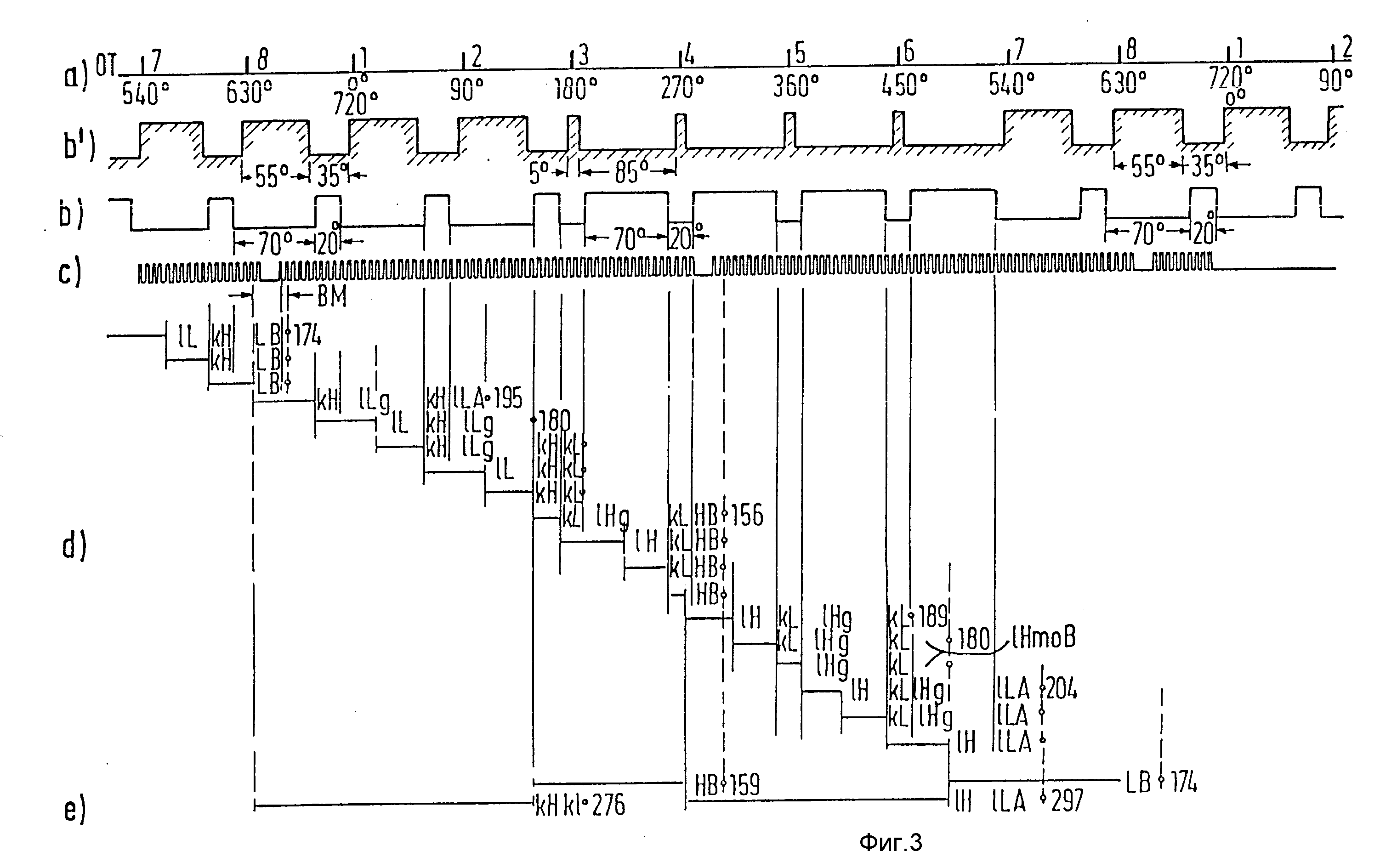
На фиг. 3 представлены зависимости для восьмицилиндрового двигателя. При этом диск распределительного вала обнаруживает соответственно четыре длинных и четыре коротких сегмента, а также четыре коротких и четыре длинных промежутка.
Выдаваемый датчиком распределительного вала выходной сигнал представлен на фиг. 3, в, сигнал коленвала на фиг. 3,с идентичен сигналу коленвала на фиг. 2.
На фиг. 3,d нанесены соотношения фаз для начала с длинной низкой фазой, за которой следует короткая высокая и затем низкая фаза с базовой меткой (ряд 1). В ряду 2 нанесена фазовая последовательность, которая получается при начале с короткой высокой фазы, в качестве следующей фазы затем следует длинная низкая фаза с базовой меткой.
Как следует из приведенной на фиг. 3,d фазовой последовательности, некоторые комбинации, проявляющиеся во время поворота коленвала на 720o, должны оцениваться четырьмя фазовыми последовательностями с целью однозначного согласования.
На фиг. 3,e снова изображена упрощенная оценка.
В результате благоприятного выбора базовой метки и в данном случае угловой диапазон вплоть до синхронизации может быть оценен на примерно ту же величину.
Если отказаться от вышеописанного ускоренного распознавания цилиндров и провести нормальное зажигание только после опознанной базовой метки в связи с сигналом датчика распределительного вала, то значительное упрощение математического обеспечения сохранится, однако немедленное распознавание группы цилиндров все же возможно.
Способ может быть перенесен на другое число цилиндров.
На фиг. 3, b нанесены сегменты датчика распределительного вала, длина этих сегментов выбрана таким образом, чтобы получить приведенный на фиг. 3,b сигнал с учетом известного свойства датчика Холла, который включается уже незадолго перед появлением положительного фронта сегмента и вскоре после появления отрицательного фронта сегмента.
Аварийный ход по датчику распределительного вала.
При выходе из строя датчика сигнала коленвала распознавание цилиндров возможно только по сигналу датчика распределительного вала.
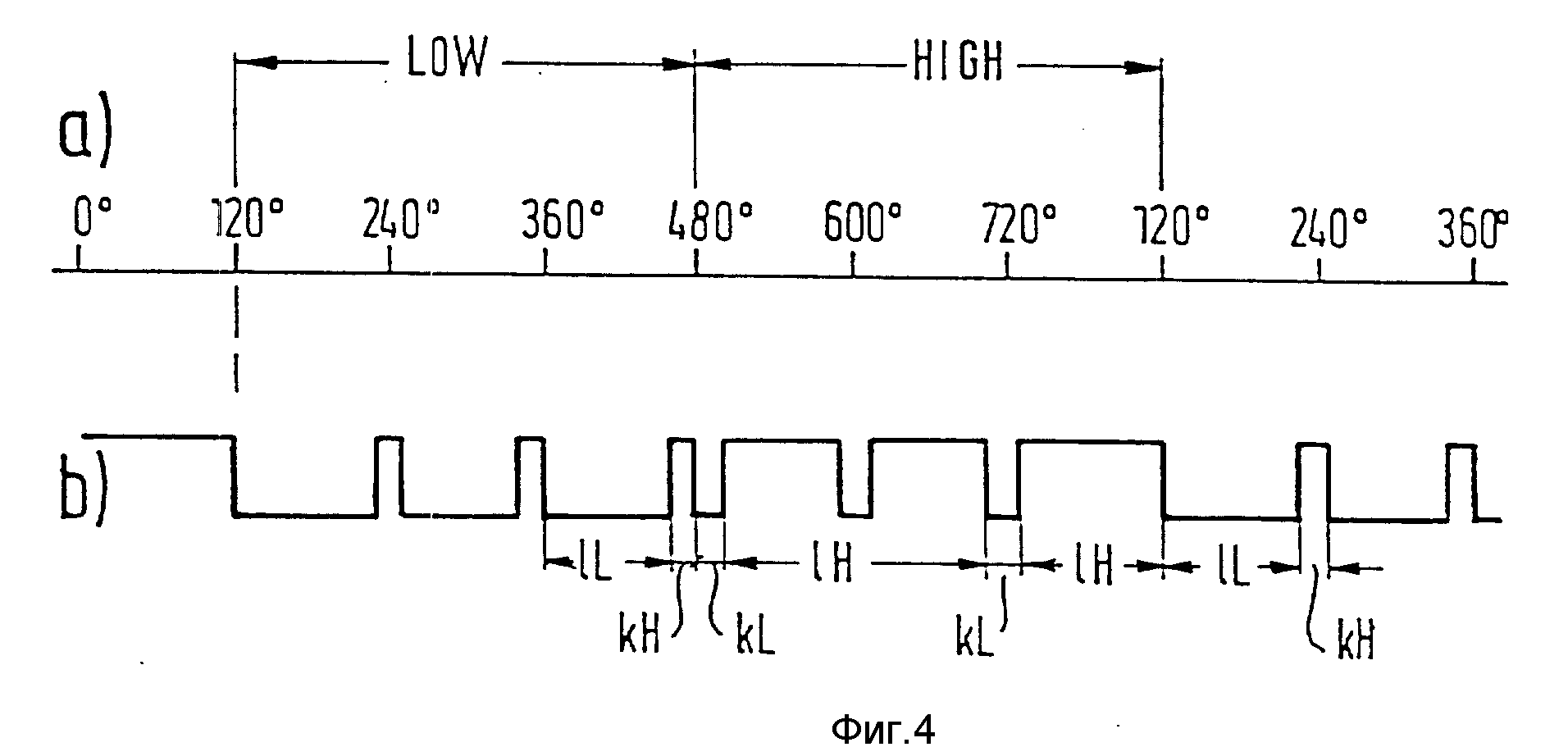
Для этого вычисляется время между фронтами импульсов датчика распределительного вала. Из отдельных вычисленных последовательностей возможно распознавание цилиндров и в динамическом диапазоне, способ проведения оценки представлен на фиг. 4.
Приведенные на фиг. 4 последовательности lL, kH, kL, lH или последовательность kL, lH, kH допускают однозначное распознавание цилиндров путем сравнения с перезаписанными последовательностями, так как обе последовательности возникают только один раз при угле коленвала 720o и поэтому однозначны.
Возможный опрос для требуемого для распознавания цилиндров при аварийном ходе времени сравнения, в данном случае с блокировкой, приведен на фиг. 5,a, времена от
T1-T6 дают возможность распознавания при условии, что: Выдача зажигания и впрыск при аварийном ходе могут
проходить по способу, описанному, например, в DE-OS 40 05 123, при этом проявляющиеся в определенный момент на постоянном угловом расстоянии отрицательные фронты сигналов датчика распределительного
вала используются в качестве триггерных меток. Впредь возможно из постоянных угловых задних фронтов сигнала датчика распределительного вала генерировать сигнал с помощью
математического обеспечения; он отвечает сигналу датчика коленвала, приведенному на фиг. 4,c. С помощью инвертированного NW-диска датчика могут быть оценены соответствующие передние
фронты импульсов.
T2
T2
Реферат
Использование: система впрыска топлива и зажигания двигателей внутреннего сгорания. Сущность изобретения: установка содержит приводимый от коленвала диск с множеством угловых меток и одной базовой меткой, приводимый распредвалом диск с сегментами и приемники сигналов с дисков. Установка отличается тем, что число сегментов на приводимом от распредвала диске равно числу цилиндров двигателя, а положение базовой метки на приводимом от коленвала диске выбрано таким образом, что снимаемый с данной метки сигнал во время первого поворота коленвала появляется в течение одной фазы сигнала с диска распредвала, а во время второго поворота коленвала - в течение другой фазы упомянутого сигнала. 2 с. и. 7 з. п. ф-лы, 5 ил.

Комментарии