Способ и устройство управления силовым агрегатом транспортного средства - RU2263810C2
Код документа: RU2263810C2
Чертежи












Описание
Настоящее изобретение относится к способу и устройству управления силовым агрегатом транспортного средства.
В современных системах управления, которыми оснащают транспортные средства, на предусмотренные конструкцией транспортного средства исполнительные органы (например силовые агрегаты, коробки передач и т.п.) подаются управляющие воздействия, которые иногда могут противоречить друг другу. Так, например, управление работой силового агрегата транспортного средства должно осуществляться на основании задаваемого водителем режима движения, а также на основании различных заданных значений, задаваемых внешними и/или внутренними системами регулирования и управления, такими, например, как противобуксовочная система, система регулирования тягового момента, развиваемого двигателем, система управления коробкой передач, система ограничения частоты вращения вала двигателя и/или скорости движения автомобиля и/или система регулирования частоты вращения при холостом ходе.
Формируемые на основании этих заданных значений управляющие воздействия иногда носят взаимоисключающий характер, и поэтому такие заданные значения, поскольку какой-либо рабочий параметр силового агрегата может устанавливаться только на одно из них, необходимо соответствующим образом согласовывать, т.е. выбирать или назначать только одно заданное значение, на которое должен установиться рабочий параметр силового агрегата.
Применительно к управлению силовым агрегатом транспортного средства указанное выше согласование различных задаваемых значений крутящего момента известно из заявки DE 19739567 А1. Согласно этой заявке путем выбора максимального и/или минимального значения из нескольких заданных значений крутящего момента определяются те заданные для установки с помощью соответствующих управляющих трактов силового агрегата значения, на которые рабочий параметр должен установиться в текущем рабочем режиме путем задания величин отдельных регулируемых параметров силового агрегата, которыми для двигателя внутреннего сгорания (ДВС) являются, например, степень наполнения цилиндров, угол опережения зажигания и/или количество впрыскиваемого топлива. При этом, однако, не учитываются граничные условия, связанные с установкой на заданные значения.
В соответствии с изобретением предлагается способ управления силовым агрегатом транспортного средства, при осуществлении которого в зависимости от заданного значения некоторого выходного параметра силового агрегата регулируют по меньшей мере один регулируемый параметр силового агрегата. Отличие предлагаемого способа от рассмотренного уровня техники заключается в том, что совместно с заданным значением задают время установки, за которое выходной параметр должен установиться на это заданное значение, при этом время установки задают независимо от управляющего тракта, используемого для регулирования по меньшей мере одного регулируемого параметра.
Формирование запроса на изменение того или иного рабочего параметра силового агрегата в виде пары значений заданный выходной параметр/время установки позволяет сделать согласование различных подобных запросов независимым от управляющих трактов конкретного двигателя. Поэтому подобный подход, основанный на представлении такого рода интерфейса в виде пары значений заданный выходной параметр/время установки, применим к приводам всех видов вне зависимости от их конкретного типа. Тем самым создается возможность использовать не относящиеся к конкретному типу двигателя координаторы без внесения в них каких-либо изменений для самых различных приводов, таких как ДВС с принудительным воспламенением рабочей смеси, дизельные двигатели, электроприводы и т.п.
Особое преимущество состоит в возможности простого расширения системы, т.е. в возможности добавления дополнительных пар значений заданные выходные параметры/время установки без внесения каких-либо изменений в ее структуру.
При этом конкретный запрос (заданный выходной параметр и время установки) отрабатывается в зависимости от текущей рабочей точки в наиболее пригодных для этой цели управляющих трактах, по которым на находящиеся в этих трактах исполнительные органы приводного агрегата подаются управляющие воздействия. Благодаря не зависящему от рабочей точки заданию для каждого заданного значения времени установки на него эту связанную с конкретным двигателем часть процесса управления можно изменять или модифицировать отдельно от единой для всех двигателей его части.
Представление указанного выше абстрактного и допускающего физическую интерпретацию интерфейса позволяет сделать общую структуру системы управления двигателем более наглядной.
Разделение процесса управления на единую для всех двигателей и на связанную с конкретным двигателем части за счет введения интерфейса заданные значения/время установки предоставляет дополнительную степень свободы, относящуюся к преобразованию запроса в связанной с конкретным двигателем части процесса управления работой двигателя. При этом значительно расширяются возможности по отработке конкретного запроса в различных управляющих трактах и создается дополнительный потенциал по оптимизации процесса управления.
Дополнительную степень свободы обеспечивает возможность задания непрерывно изменяющегося времени установки рабочего параметра на заданное значение, что позволяет с высокой точностью задавать и преобразовывать воздействия, влияющие на работу силового агрегата.
В частных случаях осуществления предлагаемого способа из нескольких пар значений заданное значение/заданное время установки может выбираться результирующее заданное значение и результирующее время установки, на основании которого регулируют регулируемый параметр. В качестве результирующей пары значений может выбираться наименьшее заданное значение и соответствующее ему время установки или наибольшее заданное значение и соответствующее ему время установки.
Далее, результирующая пара значений может формироваться из наименьшего времени установки и из суммы соответствующего этому времени установки заданного значения, а также заданного значения, интерполированного на основании заданного значения по меньшей мере еще одной пары значений в момент истечения времени установки.
В качестве результирующего времени установки может выбираться наименьшее время установки, а в качестве результирующего заданного значения может выбираться заданное значение, полученное на основании заданного значения, соответствующего наименьшему времени установки, и заданного значения, сформированного на основании по меньшей мере еще одной пары значений в момент истечения времени установки. В другом случае в качестве результирующего времени установки может выбираться наименьшее время установки, а в качестве результирующего заданного значения - наименьшее или наибольшее заданное значение в момент истечения наименьшего времени установки.
Предлагаемый способ может предусматривать возможность задания непрерывно изменяющегося времени установки.
В качестве результирующих величин на дальнейшую обработку может выдаваться пара значений, в которой интерполированное заданное значение является наибольшим в момент истечения наименьшего времени установки.
Кроме того, предлагаемый способ может предусматривать использование предполагаемого заданного значения, при этом в качестве результирующего предполагаемого значения выявляют наименьшее из согласованных предполагаемых заданных значений.
Вторым объектом изобретения является устройство управления силовым агрегатом транспортного средства, имеющее блок управления, который регулирует по меньшей мере один регулируемый параметр силового агрегата, в зависимости от заданного значения некоторого выходного параметра силового агрегата. Отличие предлагаемого устройства заключается в том, что в нем предусмотрены средства для регулирования регулируемого параметра, на вход которых в качестве задаваемых величин поступают заданное значение выходного параметра и заданное время установки, в течение которого выходной параметр должен установиться на заданное значение, при этом заданное время установки задается независимо от управляющего тракта, используемого для регулирования по меньшей мере одного регулируемого параметра.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - общая схема устройства управления силовым агрегатом,
на фиг.2 - схема предпочтительного варианта реализации интерфейса заданное значение/время установки, принцип действия которого поясняется на примере временных диаграмм, представленных на фиг.5,
на фиг.3, 4 и 6-9 - схемы, поясняющие предпочтительные варианты осуществления процесса согласования запросов заданные значения/время установки, и
на фиг.10 - временная диаграмма, поясняющая на конкретном примере принцип задания и согласования пар заданные значения/время установки.
На фиг.1 схематично изображено устройство управления силовым агрегатом, прежде всего двигателем внутреннего сгорания (ДВС). Это устройство имеет блок 10 управления, в состав которого входят входной контур 14, по меньшей мере один процессор 16 и выходной контур 18. Эти компоненты соединены между собой системой 20 связи, предназначенной для взаимного обмена данными между ними. К входному контуру 14 блока 10 управления подведены входные линии 22-26, которые в предпочтительном варианте выполнены в виде шинной системы и по которым в блок 10 управления поступают различные сигналы, которые характеризуют различные рабочие параметры, подвергаемые необходимой для управления силовым агрегатом обработке. Эти сигналы поступают от различных измерительных устройств 28-32. Указанными рабочими параметрами являются положение педали акселератора, частота вращения вала двигателя, нагрузка двигателя, состав отработавших газов (ОГ), температура двигателя и иные величины. С помощью выходного контура 18 блок 10 управления управляет развиваемой силовым агрегатом мощностью. Для этой цели предусмотрены условно показанные на фиг.1 выходные линии 34, 36 и 38, предназначенные для управления количеством впрыскиваемого топлива, углом опережения зажигания (моментом зажигания) и/или положением дроссельной заслонки с электроприводом, предназначенной для регулирования количества подаваемого в ДВС воздуха. По указанным управляющим трактам (т.е. трактам управления исполнительными органами) регулируется подача воздуха в ДВС, момент зажигания в отдельных цилиндрах, количество впрыскиваемого топлива, начало впрыскивания и/или соотношение между воздухом и топливом в горючей смеси и иные параметры. Помимо описанных выше входных величин во входной контур 14 поступают и иные входные величины от других систем управления транспортным средством и, в частности, различные заданные значения, например заданное значение крутящего момента. В качестве примера таких систем управления можно назвать противобуксовочные системы, системы регулирования динамики автомобиля, системы управления коробкой передач, системы регулирования тягового момента, развиваемого двигателем, и иные системы. Наряду с описанными выше заданными величинами, так называемыми внешними задаваемыми величинами, к которым относится также задаваемое водителем воздействие в виде задаваемого им режима движения и/или величина ограничения скорости, для управления силовым агрегатом используются также внутренние заданные величины, например изменение крутящего момента системой регулирования частоты вращения при холостом ходе, ограничение частоты вращения, при котором выдается соответствующее заданное значение, ограничение крутящего момента и/или различные ограничения, вводимые для защиты узлов и деталей от их интенсивного износа и выхода из строя, и/или величина, отдельно задаваемая для периода пуска и прогрева двигателя.
С отдельными задаваемыми величинами связаны соответствующие граничные условия или свойства, определяющие характер преобразования этих задаваемых величин. При этом в зависимости от конкретного применения с задаваемыми величинами могут быть связаны одно или несколько таких свойств. Было установлено, что важной информацией является время установки, в течение которого соответствующий рабочий параметр должен установиться на заданное значение. Наряду с этим может передаваться и другая информация о свойствах задаваемой величины, например ее приоритет. Под временем установки понимается минимальный промежуток времени, в течение которого соответствующий рабочий параметр должен установиться на заданное значение. Характер происходящего в течение этого промежутка времени под воздействием заданного значения изменения фактического значения от текущего (начального) значения до заданного значения (конечного значения) можно задавать произвольным образом в зависимости от выбранного объекта регулирования. Поэтому характер такого изменения можно согласовать с конкретным двигателем и оптимизировать с учетом по меньшей мере одного критерия (например с учетом минимального расхода топлива). При этом единственное ограничивающее условие состоит в том, что фактическое значение должно достигать заданного значения в момент истечения времени установки.
Рассмотренное выше задание пары значений, которую образуют заданное значение и время установки на него, можно использовать не только применительно к ДВС, таким как двигатели с принудительным воспламенением рабочей смеси или дизельные двигатели, вне зависимости от того, идет ли речь о двигателях с впрыскиванием топлива во впускной коллектор или о двигателях с непосредственным впрыскиванием топлива, но и применительно к концептуально иным приводным и силовым агрегатам, например применительно к электродвигателям.
В качестве задаваемой величины (заданного значения) в одном из предпочтительных вариантов предлагается использовать величину крутящего момента, развиваемого силовым агрегатом. В других вариантах в качестве задаваемых величин можно использовать иные выходные параметры силового агрегата, такие как мощность, частота вращения и т.п.
На фиг.2 показана схема, на примере которой в упрощенном виде поясняется описанный выше интерфейс, а также преобразование пары заданных значений в управляющие воздействия. При этом основными компонентами блока 10 управления являются координатор (согласующее устройство) 100 и преобразователь 102. На вход этой схемы помимо не представленных на чертеже входных величин, например указанных выше входных величин, от внешних систем управления, таких как противобуксовочная система 104 и система 106 регистрации задаваемых водителем параметров, в качестве входных задаваемых величин поступают заданные значения крутящего момента MSOLL1, соответственно MSOLL2, а также относящиеся к ним значения времени установки TSOLL1 и TSOLL2, в течение которых регулируемый параметр, в данном случае крутящий момент, должен установиться на заданное значение.
Эта пара задаваемых значений сначала поступает в координатор 100. В координаторе в соответствии, например, с одним из описанных ниже подходов, необязательно с учетом других пар задаваемых значений, выбирается результирующая пара заданных значений MSOLLRES и TSOLLRES. Эта пара выбранных значений поступает далее в преобразователь 102. В этом преобразователе 102 с учетом фактического рабочего состояния силового агрегата, определяемого на основании таких рабочих параметров, как частота вращения вала двигателя, нагрузка двигателя, фактический момент и т.п.(см. условно обозначенные на чертеже линии 108-110), формируются управляющие воздействия для управления подачей воздуха, зажиганием и/или впрыскиванием топлива. При этом согласно одному из предпочтительных вариантов для выбора конкретного управляющего тракта предусмотрены таблицы, в которых в зависимости от текущего режима работы силового агрегата содержатся минимальные значения времени установки, которые для определенного изменения крутящего момента способны обеспечить отдельные управляющие тракты. В зависимости от заданного времени установки и предусмотренного изменения крутящего момента в соответствии с заданным подходом (например с учетом оптимального расхода топлива) выбирается тот управляющий тракт, который позволяет изменять крутящий момент до необходимой величины в течение заданного времени установки. Если изменить крутящий момент до необходимой величины с использованием только одного управляющего тракта невозможно, то выбирается такая комбинация управляющих трактов, которая обеспечивает изменение крутящего момента до заданного значения в течение заданного времени установки.
В другом варианте между координатором 100 и преобразователем 102 предусмотрен еще один координатор, в котором результирующие значения, полученные в координаторе 100, в котором обрабатываются только не зависящие от двигателя величины, соответствующим образом согласуются с парами значений, состоящими из характерных для конкретного двигателя заданных значений и времени установки на них (ограничения крутящего момента, ограничения частоты вращения и т.п.). Выходной сигнал такого дополнительного координатора представляет собой результирующую пару значений заданный момент/время установки, подаваемую на преобразователь 102 и преобразуемую в нем в соответствии с описанным выше подходом в отдельные управляющие воздействия.
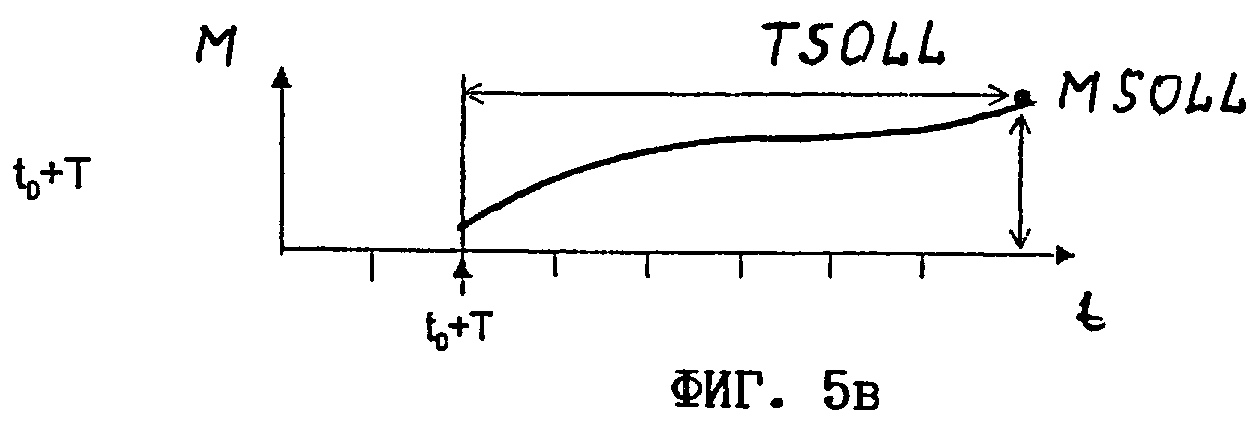
На фиг.5 показаны временные диаграммы, на которых схематично представлены характеристики изменения крутящего момента, развиваемого силовым агрегатом, в различные моменты времени при изменении заданного значения крутящего момента и заданного времени установки. При этом на фиг.5а показано изменение во времени задаваемого значения момента, на фиг.5д показана временная характеристика изменения времени установки, а на фиг.5б-5г представлены характеристики, отражающие изменение фактического значения крутящего момента М. Согласно приведенной на фиг.5а характеристике, отражающей изменение задаваемого значения крутящего момента, заданный крутящий момент возрастает от момента Т0 до момента Т0+Т, а затем до момента Т0+2Т остается постоянным. Время установки между моментами Т0 и Т0+Т остается постоянным и уменьшается до момента Т0+2Т. Соответствующим образом происходит и ожидаемое изменение крутящего момента, которое на фиг.5б начинается с момента Т0, а на фиг.5в - с момента Т0+Т. Когда заданное время установки остается постоянным, а заданное значение крутящего момента увеличивается, ожидаемое изменение крутящего момента соответствующим образом согласуется с этими условиями. В момент Т0+2Т заданное значение крутящего момента остается постоянным, однако время установки к этому моменту времени значительно уменьшилось, в результате чего изменение крутящего момента происходит значительно быстрее. При этом важно, чтобы время установки непрерывно изменялось и согласовывалось с каждым моментом времени (например, при неизменных условиях и постоянном крутящем моменте время установки всегда уменьшается с целью гарантировать достижение крутящим моментом необходимой величины по истечении первоначального времени установки).
Для согласования пары значений в координаторе 100, соответственно в координаторах, предусмотренных в системе управления двигателем, в качестве пригодных для этой цели зарекомендовали себя различные подходы, а именно, согласование по минимальному значению, согласование по максимальному значению, основанное на суммировании согласование, основанное на вычитании согласование, ориентированное на время установки согласование по максимальному значению и/или ориентированное на время установки согласование по минимальному значению.
Пример процесса согласования по минимальному значению представлен на схеме по фиг.3. Такое согласование заключается в сравнении заданных значений крутящего момента и выборе наименьшего из них в качестве результирующего заданного значения крутящего момента. В этом случае в качестве результирующего времени установки выбирается время, соответствующее этому выбранному заданному значению крутящего момента. При подобной методике согласования количество согласуемых пар значений не ограничено. Помимо времени установки аналогичным путем можно выбирать и другую информацию, например присвоенные отдельным воздействиям приоритеты или иные данные.
Показанная на фиг.3 схема позволяет пояснить процесс согласования по минимальному значению в координаторе 100. На вход этой схемы поступают заданные значения крутящего момента MSOLL1 и MSOLL2, которые поступают в компаратор 150. В компараторе определяется наименьшее из двух этих заданных значений. В зависимости от полученного при сравнении этих значений результата выдаваемый компаратором 150 выходной сигнал управляет срабатыванием переключательных элементов 152, соответственно 154, через которые наименьшее заданное значение крутящего момента выдается в последующую цепь в качестве результирующего заданного значения момента. Кроме этого, в координатор 100 поступают также значения времени установки TSOLL1 и TSOLL2, при этом компаратор 150 управляет переключательным элементом 152 таким образом, чтобы в качестве результирующего времени установки TRES в последующую цепь выдавалось значение, соответствующее выбранному наименьшему заданному значению крутящего момента.
На фиг.4 показана схема, поясняющая процесс согласования по максимальному значению. При согласовании по максимальному значению между собой также сравниваются заданные значения крутящего момента, однако в этом случае выбирается не наименьшее, а наибольшее заданное значение крутящего момента. При этом в качестве результирующего времени установки также выбирается то значение, которое соответствует наибольшему заданному значению крутящего момента. Аналогично рассмотренному выше процессу согласования по минимальному значению координатор 100 для согласования по максимальному значению имеет компаратор 160, на вход которого поступают заданные значения крутящего момента MSOLL1 и MSOLL2 и выдаваемый которым выходной сигнал управляет срабатыванием переключательных элементов 162 и 164. Компаратор 160 определяет наибольшее из поступивших на его вход заданных значений крутящего момента и в соответствии с полученным результатом управляет переключением переключательных элементов 162 и 164. В результате этого процесса через переключательный элемент 162 в последующую цепь в качестве результирующего заданного значения крутящего момента MSOLLRES выдается наибольшее заданное значение крутящего момента, а через переключательный элемент 164 в качестве результирующего значения времени установки TSOLLRES выдается время установки, соответствующее этому выбранному наибольшему заданному значению крутящего момента.
Согласование по минимальному значению используется прежде всего при направленных на уменьшение крутящего момента воздействиях, главным образом при связанных с переключением передач воздействиях и воздействиях со стороны противобуксовочной системы, тогда как согласование по максимальному значению применяется при направленных на увеличение крутящего момента воздействиях, например при воздействии со стороны системы регулирования тягового момента, развиваемого двигателем.
Было установлено, что только согласования по минимальному и по максимальному значениям недостаточно, чтобы охватить все возможные ситуации, встречающиеся на практике. Так, например, при включении дополнительных агрегатов, таких как кондиционер, крутящий момент, развиваемый силовым агрегатом, должен в течение сравнительно короткого времени установки увеличиться до необходимого уровня. Если такая необходимость в повышении крутящего момента совпадет во времени с происходящим по каким-либо иным причинам увеличением заданного значения крутящего момента, то при согласовании по максимальному или минимальному значениям может произойти резкое изменение крутящего момента, что в свою очередь может привести к снижению комфортабельности езды из-за происходящих при таком скачкообразном изменении момента "рывков" или "дерганья" автомобиля. По этой причине значения времени установки и заданные значения крутящего моментов предлагается согласовывать не независимо друг от друга, а путем их логического комбинирования. Показанная на фиг.6 временная диаграмма позволяет пояснить методику согласования, основанную на суммировании заданных значений крутящего момента. При подобном основанном на суммировании согласовании пар значений заданный момент/время установки сначала определяется наименьшее время установки. Затем для этого времени установки путем интерполяции по меньшей мере еще для одной пары значений заданный момент/время установки определяется интерполированное заданное значение момента. Результирующее заданное значение крутящего момента в этом случае представляет собой сумму при необходимости интерполированных заданных значений крутящего момента при наименьшем времени установки. Результирующее время установки является при этом наименьшим временем установки. В качестве интерполирующей функции в зависимости от конкретных условий используется линейная, экспоненциальная, монотонная или немонотонная функция. При этом интерполяция осуществляется на основании фактической или иной величины крутящего момента, например на основании последнего заданного значения момента. В этом случае помимо времени установки также можно выбирать другие данные, например приоритеты.
На фиг.6 представлена характеристика изменения крутящего момента М во времени, при этом начало координат соответствует текущему моменту времени Т0 и текущему, соответственно фактического моменту MIST. Результирующее время установки TSOLLRES крутящего момента на заданное значение является наименьшим из поступивших на обработку значений времени установки, т.е. равно значению Т1. В рассматриваемом случае требуется согласование двух заданных значений крутящего момента, а именно, MSOLL2, которому соответствует время установки Т2, и MSOLL1, которому соответствует время установки Т1. С той целью, чтобы при выборе наименьшего времени установки учесть характер изменения крутящего момента не только до заданного момента MSOLL1, но и до заданного момента MSOLL2, на основании предусмотренных в рассматриваемом примере интерполяционных прямых (прерывистые линии) вычисляется величина MSOLL2', достигаемая крутящим моментом в момент времени Т1 при его изменении в сторону заданного значения MSOLL2. Затем эта величина суммируется с заданным значением MSOLL1, которого крутящий момент должен достигнуть в момент времени Т1, при этом суммированием обоих этих значений получают результирующее заданное значение крутящего момента MSOLLRES. В последующем крутящий момент изменяется в течение времени Т1 до заданного значения MSOLLRES, при этом учитывается не только заданное значение крутящего момента MSOLL1, соответствующее наименьшему времени установки, но и заданное значение крутящего момента MSOLL2, которое соответствует другому времени установки.
Соответствующим образом предусмотрено и основанное на вычитании согласование, которое используется, например, при отключении потребителя от силового агрегата и при которой также определяется наименьшее время установки из поступившей на обработку пары значений. И в этом случае путем интерполяции по меньшей мере еще для одной пары значений определяют заданное значение, которого крутящий момент достиг в этот момент времени и которое вычислено интерполяцией. При этом в соответствии с описанным выше логическим комбинированием результирующее заданное значение крутящего момента представляет собой разность интерполированных заданных значений крутящего момента при наименьшем времени установки. Результирующее время установки представляет собой наименьшее из значений времени установки. Интерполяция, а также при необходимости учет другой информации осуществляются аналогично основанному на суммировании согласованию.
На фиг.7 показана характеристика изменения крутящего момента во времени, аналогичная представленной на фиг.6 характеристике. В этом случае результирующее время установки также принимается равным Т1. За заданное значение, которого крутящий момент должен достигнуть за это время установки, принимается значение MSOLL1. Интерполированное для момента времени Т1 заданное значение крутящего момента для пары значений MSOLL2/T2 вычитается в этом случае из MSOLL1 с получением результирующего заданного значения MSOLLRES, которого крутящий момент достигает в конечном итоге за заданное время установки Т1.
Другой возможный подход по логическому комбинированию пары значений состоит в ориентированном на время установки выборе максимального или минимального значения. Подобный подход является альтернативой описанному выше со ссылкой на фиг.3 и 4 согласованию заданных значений и принципиально отличается от него тем, что в качестве времени установки в данном случае всегда выбирается наименьшее время установки из поступивших на обработку пар значений заданный момент/время установки, а не время установки, соответствующее выбранному значению крутящего момента, как это имеет место в варианте по фиг.3 и 4. Тем самым удается более эффективно учитывать динамические условия. При этом для такого наименьшего времени установки путем интерполяции, как это описано выше, определяются заданные значения крутящего момента, интерполированные для остальных пар значений. В этом случае результирующее заданное значение крутящего момента равно наименьшему (минимум) или наибольшему (максимум) из заданных значений, достигаемому крутящим моментом по истечении наименьшего времени установки. Результирующее время установки равно наименьшему времени установки. В этом случае интерполяция и учет дополнительной информации также осуществляются в соответствии с описанным выше.
Подобная методика согласования заданных значений схематично проиллюстрирована на примере временных диаграмм, приведенных на фиг.8 и 9. На каждой из этих диаграмм изображена зависимость крутящего момента от времени. Время установки Т1 на каждой из этих диаграмм равно наименьшему из поступивших на обработку значений времени установки. Согласно фиг.8 относящимся ко времени установки Т1 заданным значением крутящего момента является значение MSOLL1, а относящимся ко времени установки Т2 - значение MSOLL2. На основании пары значений MSOLL2/T2 путем интерполяции вычисляется заданное значение, которого крутящий момент должен достигнуть в момент времени Т1 и которое затем логически комбинируется в процессе выбора максимального значения с заданным значением MSOLL1. Поскольку в рассматриваемом примере это значение меньше значения MSOLL1, результирующее заданное значение крутящего момента MSOLLRES принимается равным значению MSOLL1. Таким образом, за время Т1 крутящий момент изменяется до заданного значения MSOLL1. Соответствующий подход, основанный на выборе минимального значения, проиллюстрирован на фиг.9. В этом случае за время установки также принимается наименьшее значение Т1. Этому времени установки соответствует заданное значение MSOLL1. Другую пару значений образуют значения MSOLL2 и Т2. Для этой пары значений интерполяцией получают заданное значение, которое крутящий момент должен достигнуть в момент времени Т1 и которое меньше заданного значения MSOLL1. Поскольку рассматриваемый подход основан на выборе минимального значения, в качестве результирующего заданного значения MSOLLRES в последующую цепь, таким образом, выдается это интерполированное заданное значение, на которое крутящий момент устанавливается за время TSOLLRES.
Принцип рассмотренного выше задания пар значений заданный момент/время установки и их согласования проиллюстрирован на фиг.10 на примере конкретной рабочей ситуации с использованием согласования по минимальному значению. При этом показанная на фиг.10а характеристика отражает изменение во времени фактического момента, развиваемого силовым агрегатом, показанная на фиг.10б характеристика отражает изменение заданного значения крутящего момента, а изображенная на фиг.10в характеристика отражает изменение заданного времени установки. В рассматриваемом примере предполагается, что сначала в первую очередь учитывается задаваемое водителем воздействие. При этом задаваемый водителем крутящий момент равен значению MSOLL, время установки на которое соответствует величине TSOLL и которое может быть достигнуто за счет соответствующего увеличения крутящего момента, как это показано на фиг.10а. В момент времени Т1 срабатывает противобуксовочная система. Поскольку задаваемый этой системой крутящий момент имеет меньшую величину, в момент времени Т1 заданное значение крутящего момента скачкообразно изменяется в сторону меньшей величины, которой из-за необходимой динамики воздействия согласно фиг.10в соответствует значительно меньшее время установки (момент времени Т1). Поэтому фактический крутящий момент начиная с момента времени Т1 очень быстро уменьшается до заданного значения. Поскольку заданное значение крутящего момента остается неизменным до момента времени Т2, при неизменном времени установки фактический крутящий момент до этого момента времени более не изменяется. В момент времени Т2 воздействие со стороны противобуксовочной системы прекращается, и поэтому заданное значение крутящего момента вновь устанавливается на задаваемую водителем величину (т.е. задаваемый противобуксовочной системой крутящий момент вновь начинает превышать задаваемый водителем крутящий момент). Этому результирующему крутящему моменту соответствует более длительное время установки. После этого в зависимости от фактического рабочего состояния, преобладающего в момент времени Т2, устанавливающийся во временном интервале между моментами Т1 и Т2 в зависимости от выбранных управляющих трактов фактический крутящий момент либо медленно изменяется с учетом более длительного времени установки, либо сначала быстро изменяется до момента времени Т2, а затем изменяется с меньшей скоростью (см. фиг.10а). Рассмотренная выше ситуация может возникнуть, например, при длительном воздействии со стороны противобуксовочной системы (при трогании и разгоне автомобиля на заснеженной дороге), поскольку в этом случае управляющий наполнением цилиндров воздухом тракт постоянно остается не задействованным, а быстрое увеличение крутящего момента за счет изменения угла опережения зажигания при определенных условиях невозможно из-за отсутствия необходимого запаса крутящего момента. При наличии же такого запаса крутящего момента на принятие решения о быстром или медленном увеличении крутящего момента могут влиять и другие рабочие условия и требования (например комфортабельность езды, прогрев каталитического нейтрализатора до рабочей температуры, защита узлов и деталей автомобиля от интенсивного износа).
Реферат
Изобретение относится к двигателестроению, в частности к способам и устройствам управления силовым агрегатом. Изобретение позволяет сделать согласование различных запросов на изменение того или иного рабочего параметра силового агрегата независимым от управляющих трактов конкретного двигателя. При осуществлении способа управления силовым агрегатом транспортного средства в зависимости от заданного значения некоторого выходного параметра силового агрегата регулируют, по меньшей мере, один регулируемый параметр силового агрегата. Совместно с заданным значением задают время установки, за которое выходной параметр должен установиться на это заданное значение. Время установки задают независимо от управляющего тракта, используемого для регулирования, по меньшей мере, одного регулируемого параметра. Устройство управления силовым агрегатом транспортного средства имеет блок управления, который регулирует, по меньшей мере, один регулируемый параметр силового агрегата в зависимости от заданного значения некоторого выходного параметра силового агрегата. Предусмотрены средства для регулирования регулируемого параметра, на вход которых в качестве задаваемых величин поступают заданное значение выходного параметра и заданное время установки, в течение которого выходной параметр должен установиться на заданное значение. Заданное время установки задается независимо от управляющего тракта, используемого для регулирования, по меньшей мере, одного регулируемого параметра. 2 н. и 9 з.п. ф-лы. 10 ил.

Формула
Документы, цитированные в отчёте о поиске
Способ управления двигателем внутреннего сгорания и устройство для его осуществления
Система управления подачей топлива в двигатель внутреннего сгорания
Комментарии