Интегрированное устройство опознования воздушной цели - RU204861U1
Код документа: RU204861U1
Чертежи
Описание
Предлагаемое техническое решение относится к технике радиолокации, радиосвязи, радионавигации и радиоуправления и может быть использовано в радиоэлектронных системах для выработки признака государственной принадлежности воздушного объекта (целей).
Известно интегрированное устройство (система) опознавания [Радиолокационные системы многофункциональных самолетов. Т1.РЛС-информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов/Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2006, с. 644-650], содержащее набор (блок) информационных каналов: канал координатно-связного опознавания; канал радиолокационного опознавания; канал на основе информации, получаемой по радиолокационным изображениям; каналы радиолокационного и оптико-электронного распознавания; канал радиотехнической разведки; канал тактического опознавания. Выход каждого из информационных каналов подключен к соответствующему входу процессора обработки данных, выход каждого является выходом устройства.
Устройство работает следующим образом. На основе поступающей информации о цели, для которой необходимо определить ее принадлежность к «своим» или «чужим» объектам, каждый информационный канал выделяет соответствующие признаки. Эти признаки поступают в процессор обработки данных, который в соответствии с реализованным в нем алгоритмом выносит окончательное решение принадлежности цели к одному из двух классов - «свой» или «чужой».
К недостаткам данного устройства можно отнести то, что не используются возможности каналов по выработке частных решений в различных алфавитах.
Известно также интегрированное устройство (система) опознавания [Жиронкин СБ., Аврамов А.В., Быстраков С.Г. Построение интегрированных систем опознавания на основе координатно-связного метода. - Зарубежная радиоэлектроника. Успехи современной радиоэлектроники, 1997, 35, с. 71-74], которое содержит пять информационных каналов (подсистем): прямого опознавания, координатно-связного опознавания, радиоэлектронного распознавания, оптико-электронного распознавания и радиотехнического распознавания, а также быстродействующую цифровую вычислительную систему (БЦВС).
Устройство работает следующим образом. На основе поступающей информации о цели, для которой необходимо определить ее принадлежность к «своим» или «чужим» объектам, каждый информационный канал в соответствии с заложенным в нем принципом формирует частное решение о принадлежности цели к определенному (классу) в своем собственном алфавите. Частные решения информационных каналов поступают в БЦВС, которая в соответствии с реализованным в ней алгоритмом выносит окончательное решение о принадлежности цели к одному из двух классов - «свой» или «чужой».
Недостатками этого устройства является ограничение информационных каналов, а также отсутствие учета достоверности вырабатываемых им частных решений, что снижает достоверность принятого на их основе общего решения.
Наиболее близким по технической сущности и достигаемому результату является интегрированное устройство опознавания воздушных целей (Жиронкин С.Б., Макарычев А.В. Интегрированное устройство опознавания воздушных целей. Патент RU 2452975, опубл. 10.06.2012 бюл. №16), которое и выбрано в качестве прототипа. Устройство содержит БЦВС, а также следующие N-канальные блоки: блок информационных каналов, блок сравнения, два блока вычитания, два блока ключей, блок деления, блок схем ИЛИ и блок умножения матриц.
Устройство работает следующим образом. На основе поступающей информации о цели, для которой необходимо определить ее принадлежность к «своим» или «чужим» объектам, каждый информационный канал, по критерию идеального наблюдателя, формирует частное решение о принадлежности цели к определенному типу (классу) в собственном алфавите. Информационные каналы выдают не только частные решения






где


m - номер класса объектов в алфавите общих решений



qt - номер типа (класса) объекта в алфавите частных решений t-го информационного канала

Qt - количество типов (классов) объектов в алфавите частных решений t-ro информационного канала (объем алфавита);
P(qt/m) - априорная вероятность отнесения объекта t-ым информационным каналом к типу (классу) с номером qt при условии, что объект принадлежит классу с номером т в алфавите общих решений;


М - количество классов объектов в алфавите общих решений (М=2 при опознавании «свой», «чужой»);
N - количество информационных каналов.
Повышение достоверности опознавания на основе мягких решений происходит за счет того, что вероятности


Оптимальное по критерию Неймана-Пирсона общее решение формируется на БЦВС на основе функции правдоподобия

и решающего правила

где отношение правдоподобия / определяется выражением

а порог выбирается по заданной вероятности неправильного опознавания «чужого» объекта (m*=2) как «своего» (m*=1).
Недостатком этого устройства является загруженность системы необходимостью проводить расчетное действия по определению условных и априорных вероятностей, что ведет к увеличению времени обработки информации и общего времени принятия окончательно решения о принадлежности воздушного объекта.
Задачей предлагаемого технического решения заключается в сокращении времени на принятие решения о принадлежности объекта (цели) за счет отказа от расчета вероятностей P(qt/m) и



Цель технического решения достигается тем, что в известном устройстве, содержащем T-канальный блок информационных каналов и БЦВС, выход которой является выходом устройства, N-канальные блоки: блок сравнения, два блока вычитания, два блока ключей, блок схемы ИЛИ, блок БЦВС были заменены на следующие N-канальные блоки: два блока устройства памяти, блок сортировки мягких решений

Сопоставительный анализ с прототипом показывает, что заявленное устройство отличается тем, что содержит дополнительно введенные N-канальные блоки: два блока устройства памяти, блок сортировки мягких решений
В заявленном техническом решении используются блоки с известной логикой работы [Радиолокационные системы многофункциональных самолетов. Т1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов/ Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2006, с. 644-650; Жиронкин С.Б., Аврамов А.В., Быстраков С.Г. Построение интегрированных систем опознавания на основе координатно-связного метода. - Зарубежная радиотехника. Успехи современной радиоэлектроники, 1997, №5, с. 71-74].
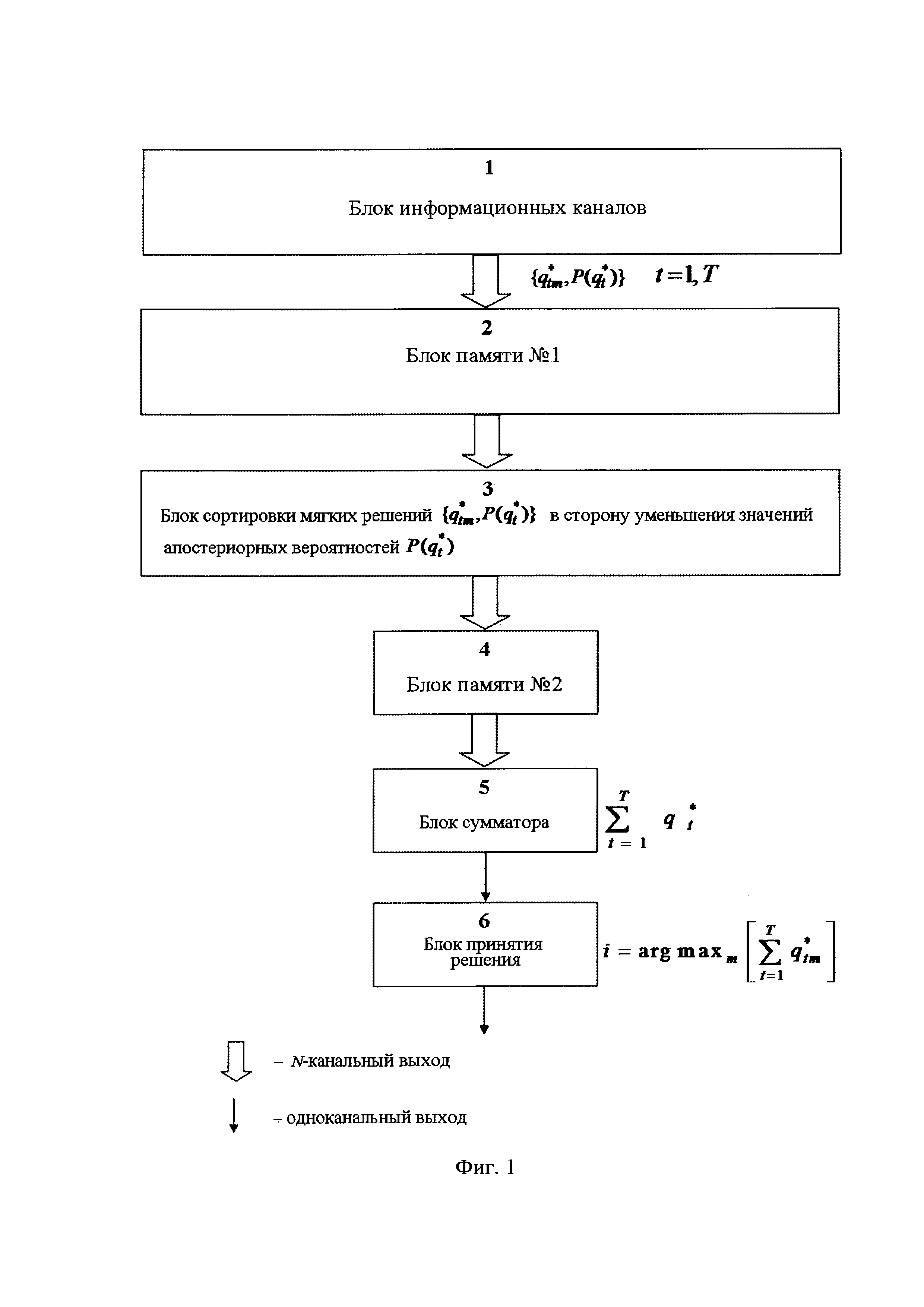
Блок-схема устройства представлена на фиг. 1
Устройство содержит:
1 - блок информационных каналов (в составе Т-каналов), выходы решений которых подключены к соответствующему входу блока памяти 1.
2 - блок памяти 1, выходы которого подключены соответственно к входу блока сортировки мягких решений


3 - блок сортировки мягких решений


4 - блок памяти 2, выходы которого подключены к блоку сумматора значений частных решений

5 - блок «сумматора» значений частных решений
6 - блок принятия решения, выход которого является выходом устройства.
Устройство работает следующим образом. Каждый из t информационных каналов блока 1 в рамках своего алфавита вырабатывает частное решение о принадлежности объекта к определенному классу в виде решения


Например:

Далее с каждого t-го канала, сформированные парные значения




Например:

После сортировки мягких решений




Например:

Далее из блока 4 последовательность выбранных частных решений значений

Результат суммирования из блока 5 через одноканальный выход поступает в блок принятия решения 6.
Окончательное решение о принадлежности воздушного объекта производится на основе правила «простого голосования», вариантом которого является его упрощенный алгоритм [Горелик А.Л. Селекция и распознавание на основе локационной информацию. М., Радио и связь, 1990, с. 86-91]:

В соответствии с правилом «простого голосования» в нашем случае i=2. Таким образом, если

Предлагаемое техническое решение промышленно применимо, так как основано на известных достижениях радиоэлектронной техники и предназначено для определения государственной принадлежности воздушных объектов (целей).
Реферат
Техническое решение относится к технике радиолокации, радиосвязи, радионавигации и радиоуправления и может быть использовано в радиоэлектронных системах для выработки признака государственной принадлежности воздушных объектов (целей).Технический результат заключается в оптимизации устройства опознавания.Заявленное устройство содержит два блока памяти, блок сортировки мягких решенийв сторону уменьшения значений апостериорных вероятностейодноканальный блок сумматора и одноканальный блок принятия решения. В результате упрощения алгоритма, используя только частные решенияи соответствующие им апостериорные вероятностивремя на принятие окончательного результата опознавания воздушного объекта (цели) сокращается, что увеличивает быстродействие устройства опознавания. 3 табл, 1 ил.
Формула


Документы, цитированные в отчёте о поиске
Интегрированная система опознавания
Комментарии