Устройство разрешения составляющих плотного порядка групповой воздушной цели по дальности и азимуту - RU2778829C1
Код документа: RU2778829C1
Чертежи

Описание
Изобретение относится к устройствам разнесенного приема сверхкороткоимпульсных (СКИ) радиолокационных сигналов и может быть использовано для построения многопозиционной радиолокационной системы сопровождения групповых целей (ГЦ), в том числе и плотной группы (роя) беспилотных летательных аппаратов (БПЛА) [1], при этом обеспечивается раздельное измерение дальности и азимута каждого БПЛА из состава группы.
Известны устройства обнаружения БПЛА, представляющие собой РЛС контрбатарейной борьбы [2-5] Основные характеристики этих РЛС представлены в таблице 1.
Таблица 1
Недостатками этих устройств являются недостаточная точность и разрешающая способность по дальности и азимуту, что не позволяет раздельно обнаруживать и измерять координаты целей из состава плотной группы БПЛА, линейные расстояния между которыми сравнимы с размерами самих БПЛА [6-8] и составляют единицы метров. Кроме того, объективное отсутствие данных (Н. д.) по разрешающей способности некоторых РЛС не позволяет оценить применимость таких устройств для сопровождения ГЦ.
Известны и другие устройства обнаружения и сопровождения, представляющие собой РЛС, специализированные для работы по БПЛА, в том числе, и с применением СКИ, а также межпачечного когерентного накопления [9]. Основные характеристики этих РЛС представлены в табл. 2.
Таблица 2
Продолжение таблицы 2
* Н. д. - нет данных
** TWS (Track While Scan) - одновременное сопровождение целей и сканирование пространства.
Для успешного обнаружения и разрешения плотной группы (роя) малоразмерных БПЛА, типа Perdix [6], все устройства, представленные в таблице 2, обладают рядом недостатков и ограничений.
Недостатком устройства 1 является малая дальность обнаружения малоразмерного БПЛА типа Perdix, а также низкие точности по дальности и азимуту. Это является следствием портативности устройства.
Недостатком устройства 2 является низкая точность и разрешающая способность по дальности и азимуту, что не позволяет разрешать составляющие плотной группы малоразмерных БПЛА.
Устройство 3 использует косвенное измерение в частотной области [13] и имеет точность и разрешение по дальности, достаточное для раздельного наблюдения целей из состава плотной группы (роя) БПЛА. Устройство может работать как с OFDM (основной), так и с ЛЧМ, СКИ зондирующими сигналами.
Недостатком устройства 3 является наличие боковых лепестков тела неопределённости, присущее как OFDM [18], так и ЛЧМ [19] сигналам. При локации плотной группы (роя) БПЛА высокий уровень боковых лепестков (УБЛ) приводит к ошибочным измерениям дальности и азимута ложных целей, что является недопустимым. Для снижения УБЛ OFDM сигнала в [20] предложен алгоритм формирования и обработки OFDM сигналов на основе манипуляции с минимальным сдвигом частоты. Однако при анализе блок-схемы обработки сигнала в ПЛИС передатчика (рис.2 в [14]) и блок-схемы обработки сигнала в ПЛИС приёмника (рис.3 в [14]) не ясно, используется ли в устройстве 3 предложенный в [20] алгоритм.
Устройство 4 имеет точности по дальности и азимуту, достаточные для раздельного наблюдения целей из состава плотной группы (роя) БПЛА. Высокая точность по азимуту при приемлемом размере зеркальной антенны обусловлена работой в миллиметровом диапазоне (Q). Устройство работает с ЛЧМ зондирующим сигналом.
Недостатком устройства 4 является высокий УБЛ ЛЧМ сигнала, доходящих до -13дБ. Применение весовой обработки позволяет снизить УБЛ до реально достижимого -37дБ, но только при жестких требованиях величине джиттера в АЦП/ЦАП и к уровню фазовых шумов передатчика и гетеродинов приемного тракта [19]. Такие требования выполнить в миллиметровом диапазоне (Q) значительно труднее, чем в сантиметровом (Х).
Устройство 5 использует прямое измерение задержки СКИ сигнала во временной области с однозначным определением дальности [17]. Такой сигнал не имеет боковых лепестков тела неопределённости по оси времени [21, с.342]. Отсутствие боковых лепестков позволяет этому устройству разрешать по дальности цели из состава плотной группы (роя) БПЛА с минимальной вероятностью ложных тревог.
Недостатком устройства 5 является низкая точность и разрешающая способность по азимуту, которая всецело зависит размера зеркальной антенны.
Устройство 6 [22] находится на стадии проекта, хотя и заявлено о возможности раздельного наблюдения целей из состава плотной группы (роя) БПЛА. Отсутствие информации о характеристиках устройства 6 не позволяет в полной мере оценить его применимость для наблюдения и разрешения составляющих плотной группы (роя) малоразмерных БПЛА.
Это является недостатком устройства 6.
Таким образом, применительно к задаче наблюдения и разрешения составляющих плотной группы (роя) малоразмерных БПЛА на ближних и средних дальностях (до 20км) рассмотренные в таблице 2 устройства обладают рядом недостатков и ограничений, что затрудняет их непосредственное применение для решения вышеуказанной задачи.
Целью предлагаемого изобретения является повышение точности и разрешающей способности по азимуту при локации СКИ сигналом плотной группы (роя) малоразмерных БПЛА.
Достижение поставленной цели обеспечивается за счет совместной обработки СКИ эхо-сигналов, принимаемых как активным СКИ локатором, так и двумя широкополосными пассивными приёмными постами (ПрП).
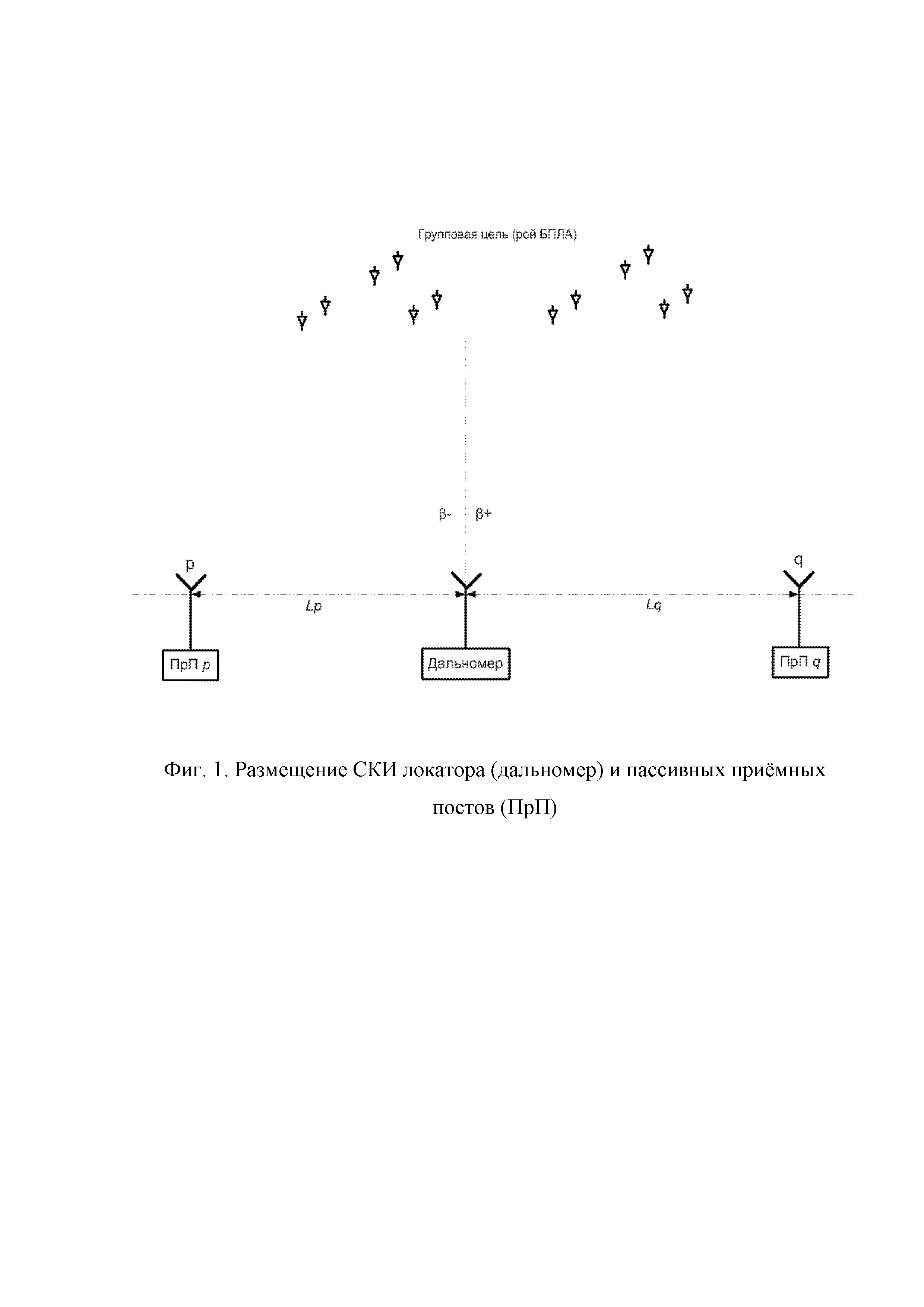
Изобретение предполагает добавление к СКИ локатору (устройство 5 из таблицы 2), работающему в качестве дальномера, двух разнесённых ПрП, которые размещаются на одной прямой по разные стороны от СКИ локатора (Фиг.1) и образуют разностно-временное пеленгационное устройство. На Фиг.1 в точке p слева от дальномера на расстоянии Lp от антенны дальномера располагается антенна ПрП p, а точке q справа от дальномера на расстоянии Lq от антенны дальномера располагается антенна ПрП q. Линия визирования, задающая нулевой отсчёт углов прихода, при этом перпендикулярна прямой, на которой размещены дальномер, ПрП p и ПрП q. Диаграммы направленности (ДН) антенн дальномера и ПрП делаются широкими, охватывающими по азимуту весь сектор налёта роя малоразмерных БПЛА.
Блок-схема предлагаемого устройства изображена на Фиг. 2. Предлагаемое устройство состоит из следующих блоков:
• антенна 1 с широкой ДН;
• циркулятор 2;
• передатчик СКИ зондирующих сигналов 3;
• широкополосное радиоприемное устройство 4;
• синхронизатор 5;
• измеритель временных интервалов (ИВИ) 6;
• разнесённые антенны 7 , 12, идентичные антенне 1;
• широкополосные радиоприемные устройства 8, 13, идентичные радиоприемному устройству 4;
• счётчики 9, 14;
• формирователь бланка 10;
• определитель знака 11;
• цифровой вычислитель (ЦВС) 15.
Блоки 1 - 6 (обведены на Фиг.2 пунктиром) вместе составляют СКИ локатор, являющийся прототипом, и работающий в предлагаемом устройстве в качестве дальномера. Блоки 7 - 9 вместе составляют левый ПрП p, а блоки 12 - 14 вместе составляют правый ПрП q.
Предлагаемое устройство работает следующим образом:
1. В исходном состоянии приёмные тракты 8 и 13 в ПрП заперты бланкирующим импульсом с формирователя бланка 10. Счётчики и определитель знака 11 обнулены по команде «сброс» из ЦВС 15.
2. Cинхронизатор 5 с началом очередного цикла зондирования формирует импульс запуска передатчика 3 (ИЗП) и одновременно бланкирующий импульс для приёмного тракта 4 в дальномере и импульс сброса для ИВИ 6.
3. После окончания излучения зондирующего СКИ сигнала снимается бланкирующий импульс приёмного тракта 4 дальномера. Запускается отсчёт временных задержек в ИВИ 6. Приёмные тракты 8 и 13 в ПрП остаются закрытыми. Устройство переходит в режим ожидания эхо-сигналов от групповой цели в очередном цикле зондирования.
4. В момент прихода эхо-сигнала от N-й цели из состава группы в приёмный тракт 4 дальномера выходной эхо-импульс этого тракта поступает на ИВИ 6, где происходит отсчёт временной задержки τN и передача значения τN в ЦВС 15. Одновременно эхо-импульс с выхода тракта 4 дальномера осуществляет старт счётчиков 9 и 14 в ПрП. По этому же эхо-импульсу формирователь бланка 10 снимает бланкирующий импульс с приёмных трактов 8 и 13 в ПрП. Устройство переходит в режим ожидания эхо-сигналов от N-й цели из состава группы на входах ПрП.
5. В момент прихода эхо-сигнала от N-й цели из состава группы в приёмный тракт 8 или 13 (в зависимости от знака угла прихода) выходной эхо-импульс соответствующего тракта вызывает останов счётчика соответственно 9 или 14 в ПрП. Другой счётчик продолжает счёт. Одновременно с остановом счётчикаформирователь бланка 10 выдает бланкирующий импульс на приёмные тракты 8 и 13, запирая их. Определитель знака 11, представляющий собой быстродействующую логическую схему с «защелкой» и со сбросом, определяет, на каком счётчике раньше произошёл останов и формирует признак, по которому в ЦВС 15 выбираются показания временной разности хода ΔτN этого счётчика, а показания другого счётчика игнорируются.
6. ЦВС 15 производит обмен со счётчиками 9 и 14 и определителем знака 11, после чего выдает команду «сброс», обнуляя счётчики 9 и 14 и определитель знака 11. Устройство переходит в режим ожидания эхо-сигналов от (N+1)-й цели из состава группы на входе дальномера. Дальность (DN) и относительный азимут (ΔβN) N-й цели рассчитываются в ЦВС по формулам:
или
Рассчитанные для каждой цели значения DN и ΔβN сохраняются в буферном ОЗУ ЦВС для выдачи в каждом цикле зондирования.
7. Цикл (4 - 6) повторяется для каждой N-й цели из состава группы до тех пор, пока не будет определена дальность (DN) и относительный азимут (ΔβN) самой удалённой цели в группе.
8. Cинхронизатор 5 с началом очередного цикла зондирования формирует ИЗП и цикл (2-7) повторяется.
Таким образом, предлагаемое устройство разрешения составляющих плотного порядка групповой воздушной цели по дальности и азимуту, имеет преимущество по сравнению с прототипом [17], что позволяет различать как по дальности, так и по азимуту цели из состава плотной группы (роя) малоразмерных БПЛА. Предлагаемое устройство является разностно-временным и нечувствительно к стабильности фазовых характеристик и к уровню фазовых шумов передатчика и гетеродинов приемных трактов.
Устройство может быть рекомендовано для создания сплошного радиолокационного поля с короткоимпульсным зондирующим сигналом Х диапазона, для надёжного разрешения плотной группы (роя) атакующих малоразмерных БПЛА на ближних и средних дальностях.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Федутинов Д.В. Разящий рой // Независимое военное обозрение, 22.05.2020.
2. Крупников А. Радиолокационные станции контрбатарейной борьбы основных зарубежных стран // Зарубежное военное обозрение, №12, 2010, с.32 - 41.
3. Противодронный заслон // Зарубежное обозрение «Вектор ПВО», №3 (7), 2018, с.67 - 80.
4. Новейшая РЛС контрбатарейной борьбы AN/TPQ 53 //
Сайт: www.lockheedmartin.com
5. РЛС контрбатарейной борьбы AN/TPQ 53 // Сайт: www.topwar.ru
6. БПЛА объединяются в рой // Обзор от Компании «ИА Безопасность сегодня» 20.06.2017 Сайт: www.secnews.ru
7. Лесив Е.А., Колодочка М.А., Щукин К.О. и др. Применение роя квадрокоптеров для поисковых операций // Сайт: www. sciencedirect.com
8. Бойко А. Рои беспилотников // Обзор на сайте www.robotrends.ru
9. Гейстер С.Р., Чугай К.Н. Межпачечное когерентное накопление - способ повышения качества оценивания спектральных характеристик радиолокационных сигналов // Доклады БГУИР, том 1, №3, 2003, с 37 - 41.
10. Официальный сайт фирмы Flir Systems Inc. // www.flir.com
11. Официальн. сайт фирмы RST Teknoloji // www.rstteknoloji.com.tr
12. Официальный сайт компании РОЛОС // www.rolos.ru
13. Родович А.А., Серяков А.А., Захаров П.Н. Реализация радиолокационной системы на основе сигналов с ортогональным мультиплексированием и частотным разделением // Учёные записки физического факультета МГУ, №5 (165508), 2016, с 1-4.
14. Родович А.А., Серяков А.А., Захаров П.Н., Полищук М.А. Реализация радиолокационной системы с использованием ансамбля сигналов с ортогональным мультиплексированием и частотным разделением // Журнал радиоэлектроники, ISSN 1684-1719, №12, 2016, с 1-10.
15. Презентация НИИ РЭТ МГТУ им. Н. Э. Баумана на форуме «Армия 2016»
16. Скосырев В.Н., Нуждин В.М., Ананенков А.Е., Коновальцев А.В. Технология сверхкороткоимпульсной радиолокации - ключ к повышению информационных возможностей РЛС // Первая международная конференция «Сверхширокополосные сигналы и сверхкороткие импульсы в радиолокации, связи и акустике», г. Суздаль, 27-29 сентября 2005.
17. Ананенков А.Е., Коновальцев А.В., Нуждин В.М., Скосырев В.Н. Технология сверхкороткоимпульсной радиолокации. Состояние и перспективы развития // Труды Второй Всероссийской конференции-семинара, г. Муром, 2006.
18. B. Nuss, Y. L. Sit, M. Fennel, D. Mayer, T. Maler, T. Zwick ”Detection drone by MIMO-OFDM-Radar” // Karlsruher Institut für Technologie, Institut für Hochfrequenztechnik und Elektronik, 2017. // Перевод с немецкого на сайте www.astrosoft.ru
19. Коновальцев А.В., Нуждин В.М., Скосырев В.Н., Харламов А.Н., Кишко Д.В. Оценка фазовых искажений широкополосных ЛЧМ сигналов в аналоговом тракте локатора // III Всероссийская научная конференция «Сверхширокополосные сигналы в радиолокации, связи и акустике» г. Муром, 2010, с.257-262
20. Назаров Л.Е., Зудилин А.С. Алгоритмы формирования и приёма OFDM сигналов на основе манипуляции с минимальным сдвигом частоты // Журнал радиоэлектроники, ISSN 1684-1719, №8, 2016, с 1-16.
21. Теоретические основы радиолокации: Под ред. Ширмана Я.Д. Учебное пособие для вузов // М.: Советское радио, 1970. - 560 с.
22. Официальное сообщение пресс-службы НИИДАР на форуме «Армия 2020» // Сайт www.niidar.ru
Реферат
Изобретение относится к области радиолокации и может быть использовано для разрешения по дальности и азимуту плотного строя беспилотных летательных аппаратов. Техническим результатом изобретения является повышение разрешения составляющих плотного порядка групповой воздушной цели по дальности и азимуту. Достижение технического результата в заявленном устройстве осуществляется за счет использования сверхкороткоимпульсных зондирующих сигналов, не имеющих боковых лепестков по дальности, в сочетании со стробированным разнесенным приемом эхо-сигналов, что в конечном итоге, позволяет разрешать по азимуту и дальности составляющие плотного строя групповой цели. 2 ил., 2 табл.
Формула
Документы, цитированные в отчёте о поиске
Способ повышения разрешающей способности радиолокационного сверхширокополосного зондирования
Комментарии