Способ повышения разрешающей способности радиолокационного сверхширокополосного зондирования - RU2710837C1
Код документа: RU2710837C1
Чертежи

Описание
Изобретение относится к области радиолокационного зондирования с использованием сверхширокополосных (СШП) сигналов длительностью ф и может быть использовано при зондировании нескольких объектов, расстояние между которыми L сопоставимо с сф, где с - скорость света, т.е. в условиях, когда сигналы, отраженные от нескольких объектов исследования, накладываются друг на друга. Такая проблема возникает, например, при радиолокационном зондирования с использованием одиночных СШП импульсных сигналов в интересах обнаружения и распознавания групповой воздушной цели.
Применение обычной узкополосной радиолокационной станции (РЛС) не позволяет достичь требуемой разрешающей способности. Пусть узкополосная РЛС излучает в направлении нахождения распознаваемых объектов зондирующий радиосигнал длительностью ф = 1 мкс. Этой длительности соответствует радиальная (дальностная) разрешающая способность дR = сф = 300 м. Цели в плотной группе, расстояние между которыми будет составлять менее 300 метров, будут восприниматься в виде единственной отметки на индикаторе РЛС. Оперативное получение информации о составе обнаруженной цели позволит своевременно назначить более высокий приоритет ее уничтожения, в соответствии со степенью вскрытой угрозы для защищаемого объекта. В этой связи для достижения своевременного вскрытия состава обнаруженной воздушной цели необходимо использовать более сложные зондирующие радиосигналы, широкобазовые сигналы с внутриимпульсной модуляцией и даже СШП сигналы.
Под СШП будем понимать импульсные радиосигналы, ширина полосы частот Дf которых сопоставима со средней частотой их спектра fср: Дf ~ fср. Для оценки степени широкополосности используют понятие показателя широкополосности сигнала з0 (иногда обозначают буквой µ): з0 = Дf / fср.
Применительно к радиолокации это определение необходимо дополнить, учитывая, что используемые в РЛС сверхширокополосные радиосигналы, как правило, представляют собой сверхкороткие радиоимпульсы, и дать физически более обоснованное определение: радиосигнал, ширина полосы частот которого сопоставима со средней частотой его спектра считаем сверхширокополосным, если его пространственная длительность сф много меньше размера излучающей (приёмной) апертуры антенны или отражающего объекта (цели) L.
Сверхширокополосная радиолокация позволяет надеяться на достижение таких преимуществ, как высокая точность измерения дальности до цели, высокая радиальная (дальностная) разрешающая способность, возможности по распознаванию типа цели и т. д.
Известен способ повышения разрешающей способности радиолокационного зондирования [1, С.134-140, рис.5.16], заключающийся в том, что излучают N-лепестковый зондирующий радиоимпульс, непрерывно принимают отраженный сигнал в выбранном временном окне, обнаруживают и оценивают сигналы от объектов исследования. Для решения задачи повышения разрешающей способности путем улучшения формы наблюдаемых импульсов за счет уменьшения уровня временнымх боковых лепестков – использовались двойные перепады напряжений с регулировкой амплитуды, длительности и относительного временномго положения перепадов напряжения, что позволило снизить уровень временнымх боковых лепестков результирующего выходного сигнала.
Недостатком такого способа является сложность реализации вследствие необходимости разработки специального программного обеспечения управления измерениями, рассчитанного на экспериментаторов.
Перед описанием прототипа и его критикой необходимо сделать некоторые пояснения.
Достижение указанных выше преимуществ СШП сигналов возможно только путем полного извлечения сверхценной некоординатной информации о зондируемом объекте, а для этого нужна адекватная обработка принимаемого сигнала, соответствующая зондирующему сигналу.
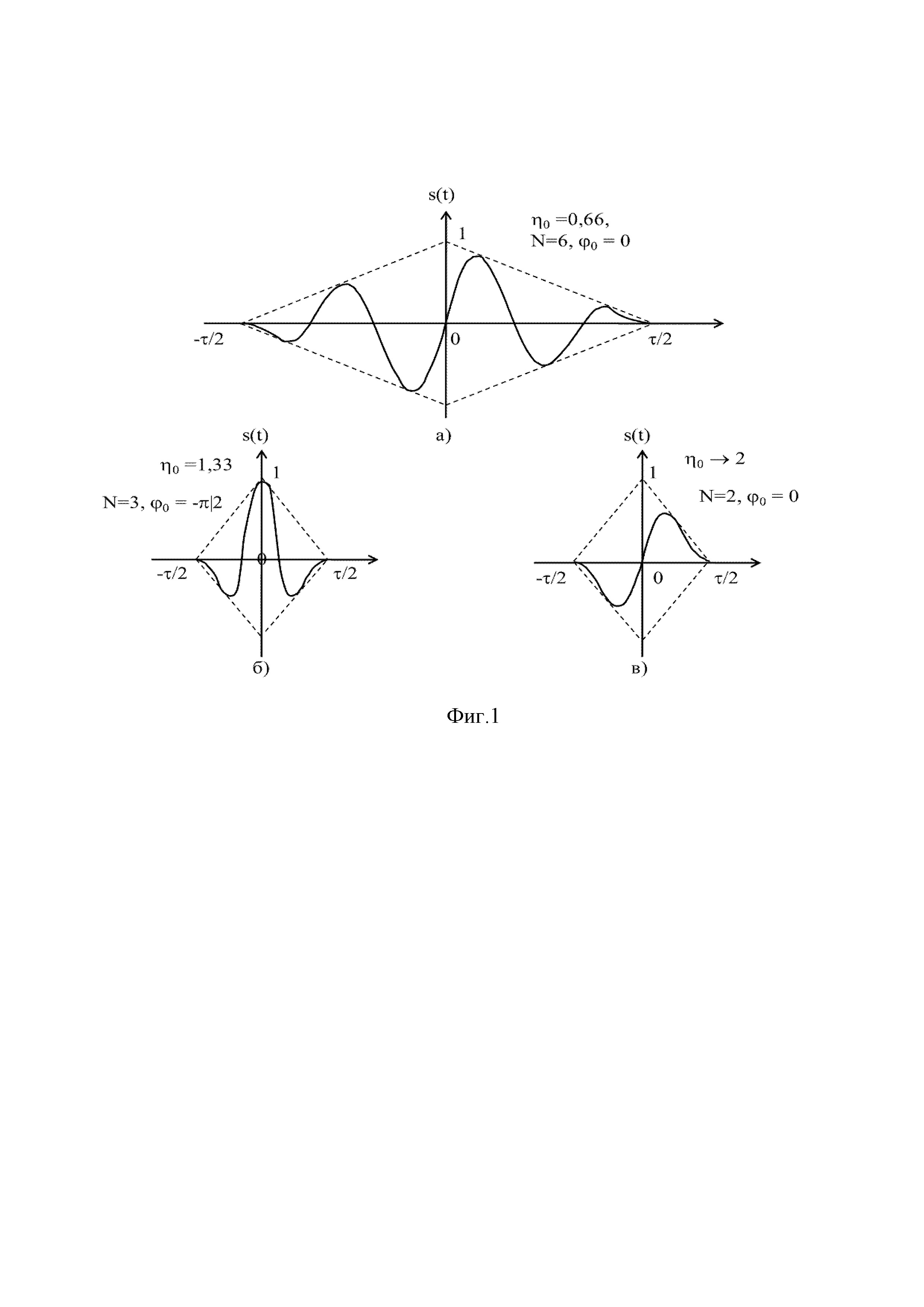
Обратимся к фиг.1 [1, рис.1.1, С.10]. Для наглядности на фиг.1 по сравнению с [1, рис.1.1] поменяны местами рисунки б) и в) в соответствии с нарастанием показателя широкополосности сигнала з0. Из фиг. 1 усматривается, что только к 6-ти лепестковому сигналу а) еще можно достаточно корректно применить понятия «огибающая» (штриховые линии), а также «частота» и «фаза», соответствующие описанию узкополосных сигналов гармоническими функциями. По мере уменьшения количества лепестков до трех (рис.б) и тем более двух (рис.в) – самого сверхширокополосного из физически реализуемых сигналов – сигнал уже адекватно не описывается привычными категориями спектрального анализа, базирующегося на взаимообразных Фурье-преобразованиях.
В этой связи с точки зрения практической реализации в качестве зондирующих сигналов в РЛС, работающих на дальностях в несколько сотен километров, интерес представляют N-лепестковые радиоимпульсы. С одной стороны, их характеристики уже обеспечивают получение сверхразрешения по дальности, при условии обеспечения их адекватной обработки, а с другой – для их формирования могут быть применены традиционные мощные приборы СВЧ. N-лепестковые радиоимпульсы, строго говоря, уже не являются узкополосными сигналами, но все еще могут описываться модификациями Фурье-преобразований – преобразованиями Гильберта [1, С.18], для них можно без существенной потери общности использовать классические виды обработки узкополосных сигналов.
Другое замечание. При СШП радиолокационном зондировании нескольких близкорасположенных объектов (например, воздушных целей в группе) возникает проблема разрешения сигналов, принятых от одного и другого объектов. Если несколько перекрывающихся сдвинутых СШП сигналов воздействует на оптимальный фильтр, каждый из них в силу применимости принципа суперпозиции к линейным системам сжимается независимо, т.е. имеется возможность разрешения сигналов от целей, импульсы которых перекрываются [2, С.132]. И наоборот, любая нелинейная обработка породит неконтролируемое количество интермодуляционных составляющих в спектре сигнала, исключающее раздельное наблюдение отдельных целей из состава группы.
Третье замечание. В спектре любого, в том числе одиночного многолепесткового радиолокационного СШП сигнала, как излучаемого, так и принимаемого антенной, заведомо нет составляющих на нулевой частоте (интеграл от функции, описывающей сигнал, по времени существования сигнала всегда равен нулю) [1, формула 1.4, С.10]. Интегрирование, как линейная операция над сигналом, не приводит к возникновению новых составляющих в спектре, в т. ч. и составляющих на нулевой частоте.
Наиболее близким к заявляемому способу является способ повышения разрешающей способности радиолокационного сверхширокополосного зондирования [3], заключающийся в том, что излучают N-лепестковый зондирующий радиоимпульс, где N = 2, 3, 4, 5..., зондирование объекта исследования N-лепестковым радиоимпульсом осуществляют многократно, непрерывно принимают отраженные сигналы в выбранном временном окне, обнаруживают сигналы от объектов исследования, измеряют и оценивают параметры сигналов, отраженных от объектов исследования, при приеме отраженных сигналов управляемой величиной задержки задают окно приема с возможностью получить всю реализацию отраженного сигнала в выбранном временном окне и положения точки отсчета в нем, интегрируют полученные отсчеты отраженного сигнала в выбранном временном окне приема N-1 раз, преобразуя N-лепестковую временную структуру сигнала в однолепестковую, обеспечивающую разрешение близкорасположенных объектов исследования, используют результаты интегрирования для обнаружения объектов исследования, измерения и оценки параметров сигналов от объектов исследования.
Авторы прототипа полагают, что, поскольку интегрирование является линейным методом преобразования сигналов, использование цифрового N-1 кратного интегрирования позволит преобразовать многолепестковую временную структуру в однолепестковую, что, в конечном счете, послужит повышению разрешающей способности радиолокационного сверхширокополосного зондирования.
Действительно, интегрирование является линейной операцией обработки сигналов. Но при этом интегратор является фильтром нижних частот, подавляющим высокие частоты, несущие сверхценную некоординатную информацию о зондируемом объекте, абсолютно необходимую именно для повышения разрешающей способности радиолокационного сверхширокополосного зондирования. Последовательное цифровое многократное интегрирование принимаемого сигнала последовательно уничтожает информацию, способную послужить повышению разрешающей способности, преобразуя сигнал после подобных процедур в малоинформативный.
Пройдя N-1 интеграторов, на выход прошла бы только постоянная составляющая принимаемого сигнала, но, как указывалось выше, в составе как излучаемого, так и принимаемого антенной радиосигнала заведомо нет составляющих на нулевой частоте, поэтому сигнал после прохождения N-1 интеграторов всегда равен нулю. Сигнал на выходе после N-1 кратного цифрового интегрирования – это шумы дискретизации, квантования и погрешности цифровой обработки.
В этой связи следует говорить о недостижении техническим решением-прототипом заявленной в качестве технического результата изобретения повышения разрешающей способности СШП зондирования.
Достигаемым техническим результатом заявляемого изобретения является повышение разрешающей способности СШП радиолокационного зондирования близкорасположенных объектов и повышение оперативности получения результата.
Для решения поставленной задачи в способе повышения разрешающей способности радиолокационного сверхширокополосного зондирования, заключающемся в том, что излучают N-лепестковый зондирующий радиоимпульс, где N = 2, 3, 4, 5..., принимают отраженный сигнал в выбранном временном окне, обнаруживают сигналы от объектов исследования, измеряют и оценивают параметры сигнала, отраженных от объектов исследования, при приеме отраженных сигналов управляемой величиной задержки задают окно приема дополнительно вводят операции обработки принимаемого N-лепесткового зондирующего радиоимпульса в К параллельных каналах, где К/N = 2, 3, 4,..., в каждом из К каналов принимаемый отраженный сигнал перемножают на сигнал, представляющий собой N-лепестковый радиоимпульс, идентичный зондирующему, задержанный в каждом канале по времени относительно предыдущего по номеру канала на величину Т/(К-1), где Т - длительность N-лепесткового зондирующего радиоимпульса, полученный в каждом из К параллельных каналов результат однократно интегрируют, выводят полученные результаты для отображения на индикатор, по результатам наблюдения нескольких ярких отметок на индикаторе делают заключение об обнаружении групповой воздушной цели и оценивают количество целей в группе.
Необходимость К-канальной параллельной обработки принимаемого N-лепесткового отраженного от цели сигнала обусловлена не только неинвариантностью приемного устройства ко времени задержки отраженного сигнала, которое априори неизвестно, но и тем обстоятельством, что устройство, реализующее заявляемый способ, обладает сверхразрешением в направлении зондирования. При этом разрешающая способность будет определяться ошибкой совмещения по времени принимаемого сигнала с перемножаемым при их перемножении в смесителе. При этом минимальное значение отношения К/N определяется из теоремы отсчетов Котельникова и равно 2. Но в интересах повышения точности измерений и снижения инструментальной ошибки измерений величину дискретизации следует уменьшить, увеличив количество каналов параллельной обработки.
Рассмотрим возможность практической реализации заявляемого способа. На фиг.2 изображена схема устройства, реализующего заявляемый способ, где:
1. Генератор СШП сигнала.
2. Передающая антенна.
3. Приемная антенна.
4. Аттенюатор.
5. Сверхширокополосный малошумящий усилитель (СМУ).
6. Управляемая линия задержки.
7. Многоотводная ультразвуковая линия задержки (МУЛЗ).
8. Компьютер.
9. К умножителей.
10. К интеграторов.
По сигналу от первого выхода компьютера 8 запускается генератор СШП сигнала 1, который излучается передающей антенной 2. СШП сигнал, отраженный от близкорасположенных объектов, предположительно – групповой воздушной цели, поступает в приемную антенну 3. Как вариант, компьютер 8 на фиг.2 входит в состав РЛС дальнего радиолокационного обзора и обнаружения целей, например, РЛК 91Н6Е. Этот радиолокатор решает задачу обнаружения движущихся целей на большимх дальностях от защищаемого объекта и не имеет технических возможностей оперативно вскрыть состав атакующих целей, тем более целей, обнаруженных на предельных дальностях. В этой связи за счет получения информации об обнаруженной цели от РЛК 91Н6Е и определения наклонной дальности до цели компьютер 8 располагает информацией о задержке между временем излучения N-лепесткового СШП сигнала передающей антенной 2 и временем прихода на приемную антенну 3 отраженного от воздушной цели СШП сигнала. Программно реализованная в компьютере 8 система измерения дальности до цели вырабатывает сигнал, поступающий со второго выхода компьютера 8 на второй вход СМУ 5, формируя временноме окно и открывая СМУ 5 для прохождения принимаемого СШП сигнала, поступающего на первый вход СМУ 5 с выхода приемной антенны 3. С третьего выхода компьютера 8 сигнал временномго окна поступает на второй вход управляемой линии задержки 6, открывая ее для прохождения сигнала, на первый вход которой поступает малая часть излучаемой мощности СШП сигнала с выхода генератора СШП сигнала 1 через аттенюатор 4. Управляемая линия задержки 6 формирует величину задержки, обеспечивающей прохождение одного N-лепесткового сигнала СШП, синхронно с приемом сигнала, отраженного от цели. МУЛЗ 7 состоит из K-1 последовательно включенных элементов, каждый из которых обеспечивает задержку на величину Т/(К-1), где Т - длительность N-лепесткового зондирующего СШП сигнала, К - количество параллельных каналов обработки.
Сама особенность принимаемых сигналов, достаточно подробно указанная выше, не позволяет использовать классические способы оптимальной обработки, связанные с фильтрацией (фильтрация инвариантна ко времени прихода отраженных сигналов и позволяет реализовать одноканальную обработку). Также абсолютно неприемлемы все методы оптимальной обработки, связанные с гетеродинированием или умножением на комплексно-сопряженную функцию с последующим интегрированием на промежуточной частоте. Автор считает, что наиболее адекватной обработкой, при которой не теряется, а полезно используется, в интересах получения максимально возможной разрешающей способности радиолокационного зондирования, является вычисление автокорреляционной функции между принимаемым N-лепестковым СШП сигналом и этим же сигналом, задержанным на время между излучением сигнала и его приемом.
Использование многоканальной обработки принимаемого отраженного от цели сигнала объясняется не только априорной неопределенностью задержки принимаемого сигнала, но и необходимостью рассчитывать значение автокорреляционного интеграла для различных величин задержек между сигналами.
Практическая реализация предлагаемого способа обработки СШП сигналов осуществляется путем подачи сигнала с выхода управляющей линии задержки на первые входы К умножителей 9 – на первый вход умножителя первого канала – непосредственно, а на первые входы остальных К-1 умножителей 9 – с соответствующего отвода МУЛЗ 7, причем вход МУЛЗ 7 соединен с выходом управляемой линии задержки 6, одновременном параллельном вычислении в К каналах К автокорреляционных интегралов: для этого на каждый из вторых входов К умножителей 9 поступает один и тот же принимаемый от цели и поступающий с выхода СМУ 5 N-лепестковый СШП сигнал, сигнал с выходов К умножителей 9 поступает на входы К интеграторов. На выходы К интеграторов 10 формируется сигнал на нулевой частоте (постоянная составляющая). Величина этого сигнала соответствует величине автокорреляционного интеграла. Сигналы с выхода К интеграторов 10 поступают в компьютер 8 для отображения на индикаторе (экране компьютера).
При точном совмещении принимаемого N-лепесткового отраженного от цели сигнала с перемножаемым будет наблюдаться существенное превышение уровня сигнала на нулевой частоте на выходе интегратора одного из каналов по сравнению с остальными K-1 каналами. Это отобразится высокой яркостью свечения отметки на индикаторе (экране компьютера 8) и графическим отображением уровня сигнала. Если отметка единственная, то такой результат позволит решить задачу распознавания – распознать обнаруженную цель как одиночную.
В случае обнаружения групповой цели, даже если произошло совмещение по времени отдельных N лепестков в принимаемом РЛС сигнале, на выходах сразу нескольких интеграторов (по числу целей в составе группы) будут наблюдаться значительные сигналы, что позволит оперативно распознать групповую цель, задолго до того, как это смогут сделать традиционные узкополосные РЛС. Конечно, допустимы ошибки в определении количества целей в составе группы (вследствие затенения одних целей в группе другими), но сам факт выявления групповой цели может быть осуществлен с высокой достоверностью и предельно оперативно, что позволит предпринять своевременные и эффективные действия по уничтожению такой цели.
Следует отметить, что увеличение значения К/N сверх нескольких единиц не приведет к возрастанию разрешающей способности – вполне очевидно, что ключевыми моментами для реализации сверхразрешения прежде всего являются ширина лепестка N-лепесткового сигнала и степень адекватности используемой обработки сигнала.
С точки зрения реализации следует отметить, что все узлы, связанные с прохождением СШП сигналов, должны быть выполнены с использованием элементов, имеющих достаточно широкие полосы пропускания. В настоящее время развитие элементной базы в значительной степени снимает остроту этих требований. Так, еще в 2016 году компания GlobalFoundries анонсировала разработку сверхбыстродействующих чипов по заказу DARPA, выполненных по 32-нанометровой технологии и способных обрабатывать входные сигналы с частотой до 30 ГГц [4]. Расчеты с использованием фиг.1 а) показывают, что использование подобной элементной базы позволяет достичь пространственных размеров каждого из N-лепестков СШП сигналов всего 5 мм, что избыточно не только для распознавания числа целей в группе, но и избыточно для технической реализации сигнатурного распознавания не только типов атакующих воздушных целей, но и находящегося на их подвесках оружия.
Таким образом, предлагаемый способ технически реализуем и позволяет повысить разрешающую способность радиолокационного сверхширокополосного зондирования и повысить оперативность получения результата.
Литература
1. Астанин Л.Ю., Костылев А.А. Основы сверхширокополосных радиолокационных измерений. – М.: Радио и связь, 1989. – 192 с. (аналог);
2. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. – М., «Советское радио», 1970, С.132;
3. Патент на изобретение RU 2348945 C1 (прототип);
4.https://www.dailytechinfo.org/military/7748-novye-sverhbystrodeystvuyuschie-chipy-stanut-osnovoy-kommunikacionnyh-sistem-rabotu-kotoryh-budet-nevozmozhno-podavit.html .
Реферат
Изобретение относится к области радиолокационного зондирования с использованием одиночных сверхширокополосных (СШП) сигналов и может быть использовано при зондировании нескольких близкорасположенных объектов, например групповой воздушной цели в составе нескольких самолетов. Способ заключается в том, что излучают N-лепестковый зондирующий радиоимпульс, принимают отраженный сигнал в выбранном временном окне, обрабатывают его в К параллельных каналах, где К/N = 2, 3, 4,..., в каждом из К каналов принимаемый отраженный сигнал перемножают на сигнал, идентичный зондирующему N-лепестковый радиоимпульс, задержанный в каждом канале по времени относительно предыдущего по номеру канала на величину Т/(К-1), где Т - длительность N-лепесткового зондирующего радиоимпульса, полученный в каждом из К параллельных каналов результат однократно интегрируют, выводят полученный результат для отображения на индикатор, по результатам наблюдения нескольких ярких отметок на индикаторе делают заключение об обнаружении групповой воздушной цели и оценивают количество целей в группе. Достигаемым техническим результатом изобретения является повышение разрешающей способности радиолокационного СШП зондирования близкорасположенных объектов и повышение оперативности получения результата. 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ сверхразрешения сигналов по времени в активной локации
Комментарии