Способ формирования и обработки радиолокационного сигнала в импульсно-доплеровских радиолокационных станциях - RU2747504C1
Код документа: RU2747504C1
Чертежи




Описание
Изобретение относится к радиолокации, в частности к формированию сигналов в когерентных радиолокационных системах, использующих высокую частоту повторения зондирующих импульсов.
Известно, что при разработке импульсно-доплеровских радиолокационных станций (РЛС) существуют два подхода к выбору параметров зондирующего сигнала (ЗС), состоящего из зондирующих импульсов (ЗИ). При первом период посылки сигнала Tп определяется из условия однозначного определения дальности до цели:

где Rм - максимальная дальность обнаружения РЛС, с - скорость света. Rм определяется радиусом Земли и высотой полета цели. Максимальная высота полета современных самолетов не превышает 20 км. Поэтому Rм=400-500 км, что соответствует Tп=3-4 мс. Такой период посылки сигнала характерен для РЛС дальнего обнаружения. Большая часть парка РЛС в России и за рубежом работает в диапазоне волн λ=0,1-0,8 м, для которого интервал межпериодной корреляции пассивной помехи (ПП) τкп=5-10 мс [1, 3], т.е. соизмерим с периодом посылок зондирующих импульсов, что не позволяет обеспечить требуемое качество подавления ПП в системах селекции движущихся целей (СДЦ): коэффициент подавления пассивной помехи составляет 10-24 дБ [1, 2, 3], тогда как известно, что для уверенного обнаружения цели на фоне ПП необходимо обеспечить подавление помехи на 50-80 дБ [1, 2, 3].
Второй подход заключается в выборе периода посылок ЗИ, исходя из требуемого подавления ПП. Требуемое подавление обеспечивают РЛС с периодом посылок ЗИ 0,1-0,3 мс, так называемой высокой частотой посылок. Сигнал практически непригоден для работы на дистанцию 400-500 км из-за размножения ПП на всю дальность до Rм, суммирования ПП смежных периодов неоднозначности определения дальности до цели. Данный тип сигнала применяется в РЛС, имеющих максимальную дальность 150-200 км, например, РЛС обнаружения маловысотных целей. При этом вся дистанция поражена ПП, поэтому режим СДЦ является нормальным режимом работы.
Одним из способов решения проблемы эффективного подавления пассивных помех является формирование и обработка комбинированного зондирующего сигнала (КЗС) [4]. В течение одного периода КЗС



где: tпп - время существования пассивной помехи (tпп=2Rпп/с);

Т1 - длительность импульса НЧП;

Т2 - длительность импульса ВЧП;
N - число импульсов ВЧП в пачке, излучаемой в течение одного периода КЗС;
Tпк - период КЗС.
Осуществить временное разнесение составляющих сигнала позволяет пространственное разнесение зоны существования ПП и зоны, свободной от ПП. Зона существования ПП ограничивается максимальной дальностью Rпп=150-200 м, так как мешающие отражения от местных предметов ограничены кривизной поверхности Земли, а сброс искусственной ПП противником раньше указанной дистанции невыгоден самому противнику, так как демаскирует его [1]. Итак, в режиме СДЦ, на дистанции 0÷2Rпп (в ближней зоне обнаружения - БЗ) в КЗС работает пачка импульсов ВЧП, на дистанции Rпп÷Rм (в дальней зоне обнаружения - ДЗ) - импульс НЧП.
Недостатком указанного способа является то, что общая длительность посылок зондирующих импульсов увеличивается по сравнению с однозначным зондирующим сигналом с низкой частотой повторения на длительность пачки импульсов ВЧП, а средняя мощность РЛС в дальней зоне обнаружения снижается в результате затрат мощности на формирование пачки ЗИ ВЧП. Это снижает точность измерения координат и максимальную дальность действия РЛС в дальней зоне обнаружения.
Наиболее близким аналогом заявляемого способа является использование высокой частоты повторения зондирующих импульсов для подавления пассивных помех и поимпульсное изменение фазы зондирующих импульсов для разделения зон неоднозначности по дальности [5]. При реализации этого способа в когерентных РЛС вводят случайное изменение начальной фазы ϕк зондирующего сигнала для каждого зондирующего импульса, где k - номер излучаемого зондирующего сигнала. Последовательность значений ϕк запоминают в течение N периодов зондирования. Обработку сигналов осуществляют в N-канальном устройстве, каждый канал которого рассчитан на оптимальный прием эхо-сигналов соответствующего интервала дальности.
Обобщенная структурная схема многоканального устройства обработки сигналов для N интервалов дальности представлена на фиг. 2: первый интервал соответствует однозначным измерениям, остальные (N-1) интервалов - неоднозначным. На фиг. 2 приняты следующие обозначения: УООС-i - устройство оптимальной обработки сигналов, yk(t) - сигнал на выходе усилителя промежуточной частоты (УПЧ) при k-м зондировании; Zi - результат обработки сигналов (статистика обнаружения).
Рассмотрим данный способ на примере выделения полезного сигнала и подавления помехи на 2-м интервале дальности. На фиг. 3 представлены основные фазовые соотношения при формировании зондирующего сигнала и при обработке эхо-сигналов. Пусть излучается последовательность импульсов с начальными фазами …, ϕk-1, ϕk, ϕk+1, … (условно показаны на фиг. 3 под цифрой 1, Tп - период повторения зондирующего сигнала). Тогда для приема полезного сигнала в диапазоне однозначных измерений используют последовательность коррекций фазы, приведенную под цифрой 2. Обработку сигналов первого диапазона неоднозначности осуществляют с использованием коррекции фазы, задерживаемой на Tп (последовательность под цифрой 3).
Такая обработка делает сигналы когерентными, что позволяет производить их накопление когерентным образом. По отношению друг к другу эхо-сигналы разных интервалов дальности являются некогерентными, поскольку изменение фазы является случайным. При когерентном суммировании такие сигналы будут проявляться в виде белого шума, что снижает отношение сигнал-шум.
Способ поимпульсного изменения фазы по случайному закону не позволяет полностью решить задачу приема сигнала в условиях пассивных помех, которые создаются, как правило, объектами, расположенными в пределах 1-го интервала дальности (однозначного измерения) и на 30-60 дБ по мощности могут превышать полезные сигналы. В подобных условиях в каналах УООС-2, УООС-3 и т.д. не обеспечивается полное подавление помех. Так, например, при числе импульсов в пачке 10…1000 подавление составит всего 11…33 дБ, что явно недостаточно [5].
Техническая задача состоит в разделении обрабатываемых отраженных сигналов, приходящих с различных интервалов неоднозначности по дальности, и повышении эффективности работы РЛС при наличии пассивных помех.
Техническая задача решается созданием такого способа формирования и обработки радиолокационного сигнала в импульсно-доплеровских радиолокационных станциях, основанного на излучении зондирующих импульсов с высокой частотой повторения и осуществлении поимпульсного изменения фазы зондирующих импульсов, использование которого обеспечивает эффективное подавление пассивных помех, и в тоже время позволяет разделить в частотной области сигналы, приходящие с различных интервалов неоднозначности по дальности, что дает возможность устранить влияние наиболее мощных пассивных помех, возникающих на первом однозначном интервале дальности, на обнаружение сигналов от целей в других интервалах дальности, а также работать без селекции движущихся целей на участках дальности, где отсутствуют пассивные помехи.
Сущность заявляемого изобретения состоит в том, что предлагаемый способ формирования и обработки радиолокационного сигнала реализуют, излучая зондирующие сигналы с высокой частотой повторения зондирующих импульсов и осуществляя поимпульсное изменение начальной фазы зондирующих импульсов для разделения зон неоднозначности по дальности. При реализации это способа в РЛС производят изменение начальной фазы ϕkзондирующего сигнала для каждого зондирующего импульса, где k - номер излучаемого зондирующего сигнала. При приеме эхо-сигналов осуществляют коррекцию начальной фазы принятых сигналов для каждого периода зондирования и осуществляют когерентное накопление сигнала. Начальную фазу для каждого зондирующего импульса вычисляют по формуле:
ϕk=k2dϕ,
где dϕ - коэффициент, определяющий приращение фазы от импульса к импульсу,
k - номер зондирующего импульса.
При приеме эхо-сигналов на каждом периоде производят коррекцию фазы, противоположную по знаку начальной фазе при излучении зондирующего импульса (-ϕk). В каждом элементе разрешения по дальности производят когерентное накопление сигнала с вычислением частотного спектра. В полученном спектре каждый из эхо-сигналов, отраженных из соответствующего интервала неоднозначности по дальности, получает смещение по частоте Δƒ, пропорциональное номеру интервала неоднозначности. В спектре, полученном для каждого элемента разрешения по дальности, вырезают отрезки частот, соответствующих пассивным помехам, а на оставшихся участках спектра проводят обнаружение сигналов от целей.
Коэффициент, определяющий приращение фазы от импульса к импульсу, может быть выбран равным dϕ=π/N или dϕ=-π/N, где N - число последовательных диапазонов неоднозначности по дальности, в пределах которых производится обработка эхо-сигналов.
При приеме эхо-сигналов на каждом периоде производится коррекция фазы, противоположная по знаку начальной фазе при излучении зондирующего импульса, которая может быть сдвинута на несколько периодов зондирующих сигналов (-ϕk+u, где u=…-3, -2, -1, 0, 1, 2, 3…).
Перед вычислением частотного спектра отсчеты эхо-сигналов, принятых в каждом элементе разрешения по дальности, могут быть умножены на оконную функцию для снижения влияния боковых лепестков спектров пассивных помех.
Поправка к начальной фазе ϕk может быть приведена к интервалу 0…2π (0…360°), учитывая цикличность фазы.
Сущность предлагаемого технического решения поясняется при помощи фигур, где:
• на фиг. 1 изображена структура огибающей КЗС;
• на фиг. 2 - структурная схема многоканального устройства;
• на фиг. 3 - последовательность значений фазы при излучении и обработке;
• на фиг. 4 - зависимость изменения начальной фазы зондирующего импульса от его номера;
• на фиг. 5 - зависимости дополнительного фазового сдвига Δϕu,k начальной фазы зондирующего импульса для первого, второго и третьего интервалов неоднозначности по дальности от номера зондирующего импульса;
• на фиг. 6 - спектр суммы эхо-сигналов, приходящих с восьми интервалов неоднозначности по дальности при dϕ=π/N, ось абсцисс - номер спектрального отсчета, ось ординат - его уровень;
• на фиг. 7 - спектр суммы эхо-сигналов, приходящих с нулевого, второго и пятого интервалов неоднозначности по дальности, ось абсцисс - номер спектрального отсчета, ось ординат - его уровень;
• на фиг. 8 - спектр суммы эхо-сигналов, приходящих с восьми интервалов неоднозначности по дальности при dϕ=-π/N, ось абсцисс - номер спектрального отсчета, ось ординат - его уровень;
• на фиг. 9 - спектр суммы эхо-сигналов, приходящих с восьми интервалов неоднозначности по дальности, когда при приеме эхо-сигналов на каждом периоде производят коррекцию фазы, противоположную по знаку начальной фазе при излучении зондирующего импульса и сдвинутую на 4 периода зондирующих сигналов -ϕk+4, ось абсцисс - номер спектрального отсчета, ось ординат - его уровень.
Формирование и обработку сигналов предлагаемым способом осуществляют следующим образом. В РЛС производят изменение начальной фазы зондирующего сигнала на поправку ϕk для каждого зондирующего импульса по формуле:
ϕk=k2dϕ,
где k - номер излучаемого зондирующего сигнала,
dϕ - коэффициент, определяющий скорость приращения фазы от импульса к импульсу.
Изменение начальной фазы сигнала от импульса к импульсу при этом происходит по квадратичному закону, пример такой зависимости приведен на фиг. 4.
При приеме эхо-сигналов производят коррекцию их начальной фазы, осуществляя поправку, которая равна поправке начальной фазы при излучении зондирующего импульса, но противоположна по знаку (-ϕk) При этом в приемник РЛС поступают одновременно эхо-сигналы от текущего зондирующего импульса с нулевого интервала дальности (однозначной) и эхо-сигналы от ранее излученных зондирующих импульсов с интервалов неоднозначной дальности, задержанные на один или несколько периодов зондирующих импульсов. Эхо-сигналы с нулевого интервала дальности после коррекции получают нулевой начальный фазовый сдвиг:
Δϕ0,k=ϕk-ϕk=0.
Это эквивалентно обычному излучению и приему сигналов без поимпульсной модуляции начальной фазы и коррекции при приеме.
Эхо-сигналы, приходящие с интервалов неоднозначной дальности с номерами k=1, 2, …, после коррекции получают дополнительный фазовый сдвиг:
Δϕu,k=ϕk-ϕk-u=2uk⋅dϕ,
где u=1, 2, …, N - номер периода неоднозначности по дальности.
На фиг. 5 в качестве примера показаны графики зависимости дополнительного фазового сдвига Δϕu,k для первого, второго и третьего интервалов неоднозначности от номера импульса. Зависимость дополнительного фазового сдвига от номера зондирующего импульса линейная, это означает, что эхо-сигналы на неоднозначной дальности приобретают дополнительный сдвиг по частоте, зависящий от номера интервала неоднозначности:
Δƒ(u)=(u⋅dϕ)/(πTzi),
где Tzi - период зондирующих импульсов.
Таким образом, проведя спектральный анализ сигнала в каждом из элементов разрешения по дальности, можно разделить эхо-сигналы, приходящие с разных интервалов неоднозначности по дальности. Для того чтобы наиболее эффективно использовать частотное разделение, целесообразно коэффициент, определяющий приращение фазы от импульса к импульсу, выбрать равным dϕ=π/N, где N - число последовательных диапазонов неоднозначности по дальности, в пределах которых производится обработка эхо-сигналов.
Рассмотрим пример реализации предлагаемого способа. Число интервалов неоднозначности по дальности примем равным восьми. Пусть в пачке излучают N=1024 зондирующих импульса, каждый из которых имеет начальную фазу:
где n=0…N-1 - номер зондирующего импульса.
Сигналы, принятые с разных интервалов неоднозначности по дальности можно представить в следующем виде:

где нижний индекс - номер зондирующего импульса;
верхний индекс - номер интервала неоднозначности по дальности.
Амплитуда сигналов условно принята убывающей от 1 до 0,3 при изменении номера интервала неоднозначности по дальности от 0 до 7, доплеровское смещение частоты отсутствует.
Принятая приемником с неоднозначных дальностей сумма сигналов с неоднозначных дальностей после аналого-цифрового преобразования подвергается обратной фазовой коррекции в соответствии со следующей формулой:

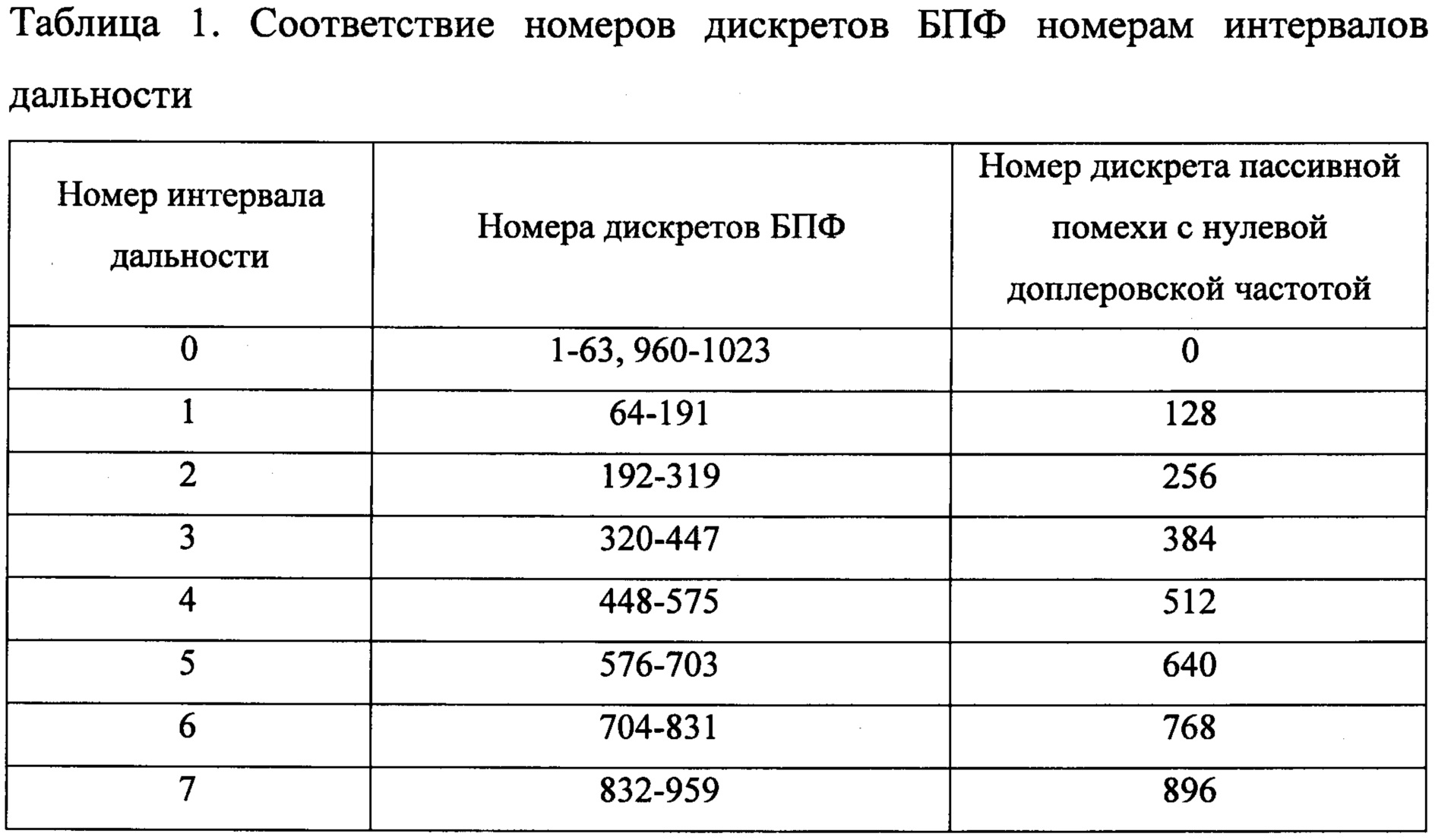
Далее вычисляется спектр сигнала с помощью быстрого преобразования Фурье (БПФ). На фиг. 6 в качестве примера приведен спектр сигнала с нулевой частотой Доплера, имитирующий пассивные помехи, одновременно приходящие с N=8 интервалов по дальности (нулевого однозначного и семи неоднозначных). Спектр вычислен с помощью быстрого преобразования Фурье по 1024 отсчетам сигнала. Разные номера дискретов быстрого преобразования Фурье соответствуют разным интервалам дальности. Это соответствие приведено в таблице 1.
На фиг. 7 в качестве примера приведен спектр сигнала с нулевой частотой Доплера, имитирующий пассивные помехи, одновременно приходящие с нулевого, второго и пятого интервалов по дальности (одного однозначного и двух неоднозначных). Из фиг. 6, 7 видно, что обработка спектра позволяет вырезать отрезки частот, соответствующие пассивным помехам, а на оставшихся участках спектра проводить обнаружение сигналов от целей. Причем на интервалах дальности, где отсутствуют пассивные помехи, возможна работа без селекции движущихся целей с обнаружением целей с нулевой радиальной скоростью и нулевой частотой Доплера.
В случае, когда коэффициент, определяющий приращение фазы от импульса к импульсу, выбирают равным dϕ=-π/N, изменяется порядок расположения сигналов от различных участков неоднозначной дальности в спектре. На фиг. 8 в качестве примера приведен спектр сигнала с нулевой частотой Доплера аналогичного приведенному на фиг. 6, имитирующий пассивные помехи, одновременно приходящие с N=8 интервалов по дальности, но с приращением фазы с противоположным знаком.
В случае, если при приеме эхо-сигналов на каждом периоде производят коррекцию фазы, противоположную по знаку начальной фазе при излучении зондирующего импульса и сдвинутую на несколько периодов зондирующих сигналов (-ϕk+u, где u=…-3, -2, -1, 0, 1, 2, 3…), порядок расположения сигналов от различных участков неоднозначной дальности в спектре изменяется в виде циклического сдвига. На фиг. 9 в качестве примера приведен спектр сигнала с нулевой частотой Доплера, аналогичный приведенному на фиг. 6, имитирующий пассивные помехи, одновременно приходящие с N=8 интервалов по дальности, но со сдвинутой на 4 периода зондирующих импульсов коррекцией фазы принятых эхо-сигналов.
Для снижения влияния боковых лепестков спектров пассивных помех перед вычислением спектра отсчеты эхо-сигналов, принятых в каждом элементе разрешения по дальности, можно умножить на оконную функцию, конкретный вид которой может быть выбран, исходя из требуемого уровня боковых лепестков, энергетических потерь, требуемого разрешения по частоте [6].
При дальнейшей обработке сигналов в спектре, полученном для каждого элемента разрешения по дальности, вырезают отрезки частот, соответствующих пассивным помехам, а на оставшихся участках спектра проводят обнаружение сигналов от целей. Если имеется априорная информация об отсутствии помех на отдельных участках неоднозначности по дальности, в соответствующих участках спектра работают без селекции движущихся целей.
Для удобства реализации способа поправку к начальной фазе ϕk, учитывая цикличность фазы, можно привести к интервалу 0…2π (0…360°).
Таким образом, предлагаемый способ позволяет использовать зондирующие сигналы с высокой частотой повторения для обеспечения эффективного подавления пассивных помех, и в тоже время разделить в частотной области сигналы, приходящие с различных интервалов неоднозначности по дальности, что позволяет устранить влияние наиболее мощных пассивных помех, возникающих на первом однозначном интервале дальности, на обнаружение сигналов от целей в других интервалах дальности, и работать без селекции движущихся целей на участках дальности, где априори отсутствуют пассивные помехи.
В результате сравнения предлагаемого способа не только с наиболее близким аналогом, но и с другими техническими решениями в данной области техники, по мнению заявителя и авторов, заявляемый способ формирования и обработки радиолокационного сигнала в импульсно-доплеровских радиолокационных станциях обладает совокупностью существенных признаков, не известных из уровня техники для объектов подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения. Также заявляемый способ формирования и обработки радиолокационного сигнала в импульсно-доплеровских радиолокационных станциях, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», так как для специалистов он явным образом не следует из уровня техники, т.е. не известен из доступных источников научной, технической и патентной информации на дату подачи заявки. Приведенный выше пример использования предлагаемого способа показывает соответствие его критерию «промышленная применяемость».
Список использованных источников
1. Бартон, Д.К. Модели мешающих отражений от земной поверхности для анализа и проектирования РЛС // ТИИЭР. - 1985. - №2.
2. Сосулин, Ю.Г. Оценочно-корреляционная обработка сигналов и компенсация помех / Ю.Г. Сосулин, В.В. Состров, Ю.Н. Паршин. - М.: Радиотехника, 2014.
3. Спэффорд, Л. Оптимальная обработка радиолокационного сигнала при наличии отражений от местных предметов // Зарубежная радиоэлектроника. - 1969. - №10. - (Изв. высш. учеб. заведений).
4. Свердлов Р.В. Комбинированные зондирующие сигналы для работы в сложной помеховой обстановке / Приволжский научный вестник. - №12-3 (40) - 2014.
5. Кострова Т.Г. Методы и устройства устранения неоднозначных измерений дальности в импульсных радиотехнических системах / Диссертация на соискание ученой степени кандидата технических наук - Владимир 2007.
6. Дворкович В.П. Дворкович А.В. Оконные функции для гармонического анализа сигналов / Издание второе, переработанное и дополненное - Москва: Техносфера, 2016.
7. Рядко Л. DDS: прямой цифровой синтез частоты / Компоненты и технологии №7 2001.
Реферат
Изобретение относится к радиолокации, в частности к формированию сигналов в когерентных радиолокационных системах, использующих высокую частоту повторения зондирующих импульсов. Техническим результатом является обеспечение разделения отраженных сигналов, приходящих с различных интервалов неоднозначности по дальности, и повышение эффективности работы РЛС при наличии пассивных помех. Способ формирования и обработки радиолокационного сигнала реализуют, излучая зондирующие сигналы с высокой частотой повторения зондирующих импульсов и осуществляя поимпульсное изменение начальной фазы зондирующих импульсов для разделения зон неоднозначности по дальности. Для этого производят изменение начальной фазы ϕkзондирующего сигнала для каждого зондирующего импульса, где k - номер излучаемого зондирующего сигнала. При приеме эхо-сигналов осуществляют коррекцию начальной фазы принятых сигналов для каждого периода зондирования и осуществляют когерентное накопление сигнала. Начальную фазу для каждого зондирующего импульса вычисляют по формуле: ϕk=k2dϕ, где dϕ - коэффициент, определяющий приращение фазы от импульса к импульсу. При приеме эхо-сигналов на каждом периоде производят коррекцию фазы, противоположную по знаку начальной фазе при излучении зондирующего импульса (-ϕk). В каждом элементе разрешения по дальности производят когерентное накопление сигнала с вычислением частотного спектра. В полученном спектре каждый из эхо-сигналов, отраженных из соответствующего интервала неоднозначности по дальности, получает смещение по частоте, пропорциональное номеру интервала неоднозначности. В спектре, полученном для каждого элемента разрешения по дальности, вырезают отрезки частот, соответствующих пассивным помехам, а на оставшихся участках спектра проводят обнаружение сигналов от целей. 4 з.п. ф-лы, 1 табл., 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при воздействии по основному лепестку диаграммы направленности антенны помехи типа drfm
Способ первичной импульсно-доплеровской дальнометрии целей на фоне узкополосных пассивных помех
Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской рлс с фар
Комментарии