Способ первичной импульсно-доплеровской дальнометрии целей на фоне узкополосных пассивных помех - RU2641727C1
Код документа: RU2641727C1
Чертежи


Описание
Изобретение относится к технике первичных радиолокационных измерений и, в частности, к технологиям дальностных измерений импульсно-доплеровских (ИД) радиолокационных станций (РЛС) наземного (надводного) базирования при обнаружении движущихся целей на фоне узкополосных пассивных помех и, в первую очередь, на фоне интенсивных отражений от подстилающей земной (водной) поверхности, местных предметов и малоподвижных метеообразований. Область применения предлагаемого способа - радиолокационные информационно-измерительные системы импульсно-доплеровского типа различного назначения.
Широко известны и востребованы в практике создания радиолокационных информационно-измерительных средств, комплексов и систем импульсно-доплеровские РЛС (ИД РЛС), которые характеризуются неоднозначностью первичных измерений дальности до обнаруженных целей [1…4]. Традиционно для устранения неоднозначности первичных дальностных измерений требуется, в ущерб оперативности первичной дальнометрии целей, производить многократное (три и более число раз) зондирование обнаруженной цели квазинепрерывными сигналами (КНС) разной частоты повторения импульсов (ЧПИ) с обработкой замеров неоднозначных временных задержек целевых эхо-сигналов одним из нижеперечисленных методов [1…4]: методом нониусных частот, методом максимального правдоподобия, методом фиксации совпадений и методом, основанным на китайской теореме об остатках. Особая острота обозначенного недостатка проявляется при работе в условиях неразрешения по угловым координатам и скорости группы рассредоточенных по дальности целей, когда существенно ограничены возможности межзондового отождествления отметок целей, сформированных в нескольких циклах их зондирования сигналами разной ЧПИ. Для повышения оперативности первичной дальнометрии обнаруживаемых целей в [1…4] рассмотрен способ дальнометрии, основанный на использовании КНС с линейной частотной модуляцией (ЛЧМ) несущей частоты. Однако этот способ характеризуется недостаточной помехоустойчивостью в условиях маскирования целей пассивными помехами (ПП) высокой интенсивности и, в первую очередь, при работе по радионадгоризонтным целям с приземными трассами прохождения локационных сигналов. Отмеченный недостаток усугубляет то обстоятельство, что при использовании квазинепрерывных сигналов (КНС) маскирование стробируемых целевых эхо-сигналов происходит отражениями от помехоформирующих образований естественного и (или) искусственного происхождения, распределенных не только в окрестности визируемой цели, а по всей стробируемой дистанции лоцируемого пространства.
В [3] рассмотрен принятый в качестве прототипа метод двухэтапной первичной дальнометрии обнаруженных ИД РЛС целей с однозначной оценкой в обнаружительном цикле зондирования их радиальной скорости (доплеровских сдвигов целевых эхо-сигналов), основанный на проведении непосредственно вслед за результативным циклом обнаружения измерительного дальномерного цикла (такта) зондирования обнаруженных целей квазинепрерывным сигналом (КНС) с той же ЧПИ, но с дополнительным вводом линейной частотной модуляции (ЛЧМ) несущей частоты КНС. Ввод ЛЧМ несущей КНС позволяет реализовать первичные дальностные измерения при условии радиовидимости целей на фоне ПП и доступности получения однозначных оценок доплеровских сдвигов обнаруженных целевых эхо-сигналов, сформированных на этапе обнаружения целей и в дополнительном измерительном цикле зондирования. Согласно этому методу принятые в измерительном цикле зондирования эхо-сигналы после частотной демодуляции подвергаются многоканальной времячастотной корреляционно-фильтровой обработке с оценкой частотных сдвигов целевых эхо-сигналов, определяемых их скоростным доплеровским сдвигом и псевдодоплеровским сдвигом, обусловленным наличием временной задержки целевых эхо-сигналов с ЛЧМ несущей КНС.
Как отмечено в [1…4], рассмотренный метод обладает невысокой помехоустойчивостью и, в частности, наличием непросматриваемых «слепых» участков дальности не только по причине бланкирования приемника на время работы передатчика ИД РЛС, но и по причине маскирующего влияния ПП в пределах «слепых» частотных участков (частотных мертвых зон) анализируемого диапазона доплеровских и псевдодоплеровских частотных сдвигов целевых эхо-сигналов (целевой эхо-сигнал) [4 с. 238]. Это вынуждает производить дополнительные уточняющие зондирования обнаруженных целей, что, как следствие, снижает оперативность первичной дальнометрии целей.
Технической задачей, решаемой предлагаемым способом, является повышение помехоустойчивости первичной дальнометрии обнаруженных наземной (надводной) ИД РЛС одиночных целей и (либо) неразрешаемых по углу и скорости распределенных по дальности группы целей в условиях их маскирования узкополосной (с локальным сосредоточенным одномодовым энергетическим спектром) ПП высокой интенсивности без ущерба оперативности и точности местоопределения целей.
Техническим результатом, обеспечивающим решение поставленной технической задачи, является повышение времячастотной (дальностно-скоростной) избирательности ИД РЛС при приеме целевых эхо-сигналов (целевой эхо-сигнал) на фоне помеховых во всем диапазоне дальностных измерений. Отмеченный технический результат обеспечивается применением КНС с оптимизированными параметрами модуляции, позволяющих реализовать характеристики времячастотной избирательности приемных каналов ИД РЛС с инвариантными к временным сдвигам целевого эхо-сигнала глубокими противопомеховыми провалами в области частотной локализации ПП. Оптимизация параметров модуляции КНС и согласование с ними реализуемых характеристик времячастотной обработки осуществляется за счет их адаптации к оцененной в обнаружительном цикле зондирования фоноцелевой обстановке. Указанная адаптация обеспечивает в измерительном цикле зондирования обнаруженных целей эффективное помехоподавление ПП во всем диапазоне дальностных измерений в отсутствие вышеупомянутых частотных мертвых зон.
Сопутствующее применению адаптированных к фоноцелевой обстановке КНС с линейной модуляцией несущей частоты ЛЧМ резкое (на порядок и более) снижение уровня боковых максимумов функции автокорреляции КНС также позволяет устранить характерную для КНС без ЛЧМ неоднозначность дальностных измерений. Благодаря этому сохраняется возможность реализации первичной однозначной дальнометрии обнаруженной цели либо группы не разрешаемых по углам и скорости целей за один-два цикла зондирования.
Указанный технический результат и, как следствие, решение поставленной технической задачи достигается тем, что на подготовительном временном интервале работы импульсно-доплеровской радиолокационной станции (РЛС) производят снятие помеховой карты мешающих отражений с оценкой в каждом угловом направлении рабочего сектора энергетического дальностно-скоростного распределения ПП, по данным помеховой карты определяют помехонасыщенные сектора с узкополосным энергетическим спектром ПП и уточняют параметры применяемых в этих секторах зондирующих локационных сигналов и характеристик их приемообработки, в процессе поиска и обнаружения целей в угловых направлениях, характеризующихся наличием интенсивных ПП, n-кратно формируют и направленно излучают регулярные квазинепрерывные сигналы (КНС) разной высокой частоты повторения импульсов (ЧПИ), значения ЧПИ, количество и длительность которых удовлетворяют условиям обеспечения полноты перекрытия требуемого диапазона дальностей обнаружения целей, достаточности реализуемого качества помехоподавления и однозначности скоростного местоопределения обнаруживаемых целей, соосно направленно принимают в паузах работы передатчика РЛС целевые и помеховые эхо-сигналы с последующей их многоканальной по дальности и скорости корреляционно-фильтровой времячастотной обработкой путем многоканального стробирования, частотной режекции помеховых сигналов нулевой доплеровской частоты, противопомехового взвешивания и многоканальной доплеровской фильтрации; в результативном цикле импульсно-доплеровского обнаружения, в котором произошло обнаружение цели на фоне узкополосных ПП, производят измерения времячастотных параметров профильтрованного обнаруженного целевого эхо-сигнала с оценкой его однозначного доплеровского и неоднозначного временного сдвигов, а затем производят дальностно-измерительный цикл зондирования обнаруженной цели с использованием КНС с линейной частотной модуляцией (ЛЧМ) его несущей частоты, в котором принимаемые эхо-сигналы также подвергают многоканальной времячастотной корреляционно-фильтровой обработке, повторно обнаруживают целевой эхо-сигнал, измеряют уровни мощности превысивших порог обнаружения локальных максимумов профильтрованного целевого эхо-сигнала, а также его однозначный частотный и неоднозначный временной сдвиг, после чего производят идентификацию главного максимума профильтрованного целевого эхо-сигнала и оценку его однозначного временного сдвига с последующим ее пересчетом в оценку дальности обнаруженной цели, отличающийся тем,что ЧПИ и скорость ЛЧМ несущей частоты КНС в измерительном цикле зондирования согласуют с оценкой однозначных измерений доплеровского частотного сдвига целевого эхо-сигнала в обнаружительном цикле зондирования в соответствии с формулами
где Fи - значение ЧПИ КНС в измерительном цикле зондирования;

p - целочисленный параметр выбора ЧПИ КНС;
βи - скорость ЛЧМ несущей частоты КНС.
Введение отмеченных выше и далее рассмотренных отличий обеспечивает адаптированную к фоноцелевой обстановке оптимизацию параметров модуляции КНС с ЛЧМ и, соответственно, функции неопределенности (ФН) используемых в измерительных циклах зондирования локационных сигналов. Благодаря этому в зоне допоиска предварительно обнаруженных и оцененных по скорости радиального перемещения целей обеспечивается эффективное помехоподавление, а главное, автокорреляционное временное сечение ФН применяемого КНС характеризуется необходимой для дальнометрии ярко выраженной малоразмерной областью локализации ее главного максимума.
Предлагаемое техническое нововведение позволяет достичь указанный выше технический результат, состоящий в повышении помехоустойчивости первичных дальностных измерений одиночных целей либо не разрешаемых по угловым координатам и скорости распределенных по дальности групповых целей с требуемой оперативностью и точностью.
Изобретение поясняется чертежами, представленными на фиг. 1…7.
На фиг. 1 приведены топографические иллюстрации ФН КНС (их горизонтальные сечения) в отсутствие ЛЧМ при задании параметров КНС

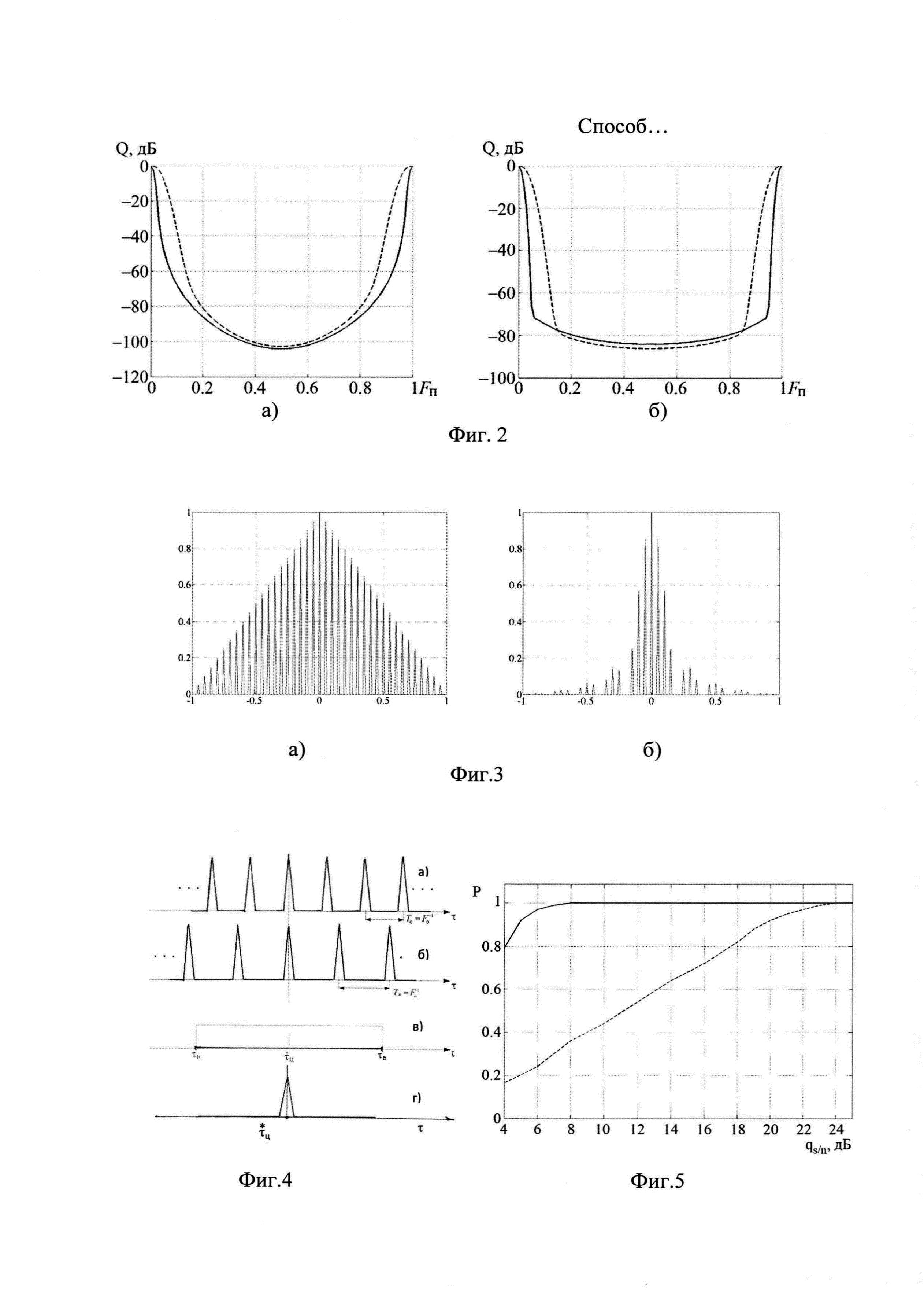
На фиг. 2 приведены графики частотно-временной избирательности приемника КНС (Q-функций КНС [6]) в отсутствие (сплошная) и при наличии ЛЧМ их несущей (пунктирная).
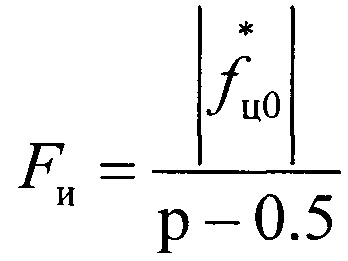
На фиг. 3 приведены графические построения модельных числовых расчетов автокорреляционных функций (АКФ) КНС в отсутствие и при наличии ЛЧМ несущей.
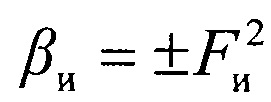
На фиг. 4 приведена графическая иллюстрация реализуемого в соответствии с предлагаемым способом принципа идентификации главного максимума сигнального отклика сжатого целевого эхо-сигнала (целевой эхо-сигнал) на выходе многоканального приемника ИД РЛС в измерительном цикле зондирования. На фиг. 4а) условно показан график плотности вероятности неоднозначного местоопределения цели по времени запаздывания целевого эхо-сигнала в обнаружительном цикле зондирования, на фиг. 4б) - график плотности вероятности неоднозначного местоопределения цели по времени запаздывания целевого эхо-сигнала в измерительном цикле зондирования, на фиг. 4в) - доверительный интервал предварительной низкоточной однозначной оценки времени запаздывания целевого эхо-сигнала в измерительном цикле зондирования, на фиг. 4г) - определенный в пределах доверительного интервала график плотности совместной вероятности оценок однозначных и неоднозначных измерений времени запаздывания целевого эхо-сигнала в обнаружительном и измерительном циклах зондирования.
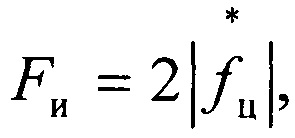
На фиг. 5 приведены графики функции вероятности правильной идентификации (селекции) главного максимума сигнального отклика целевого эхо-сигнала (целевой эхо-сигнал) на выходе приемника ИД РЛС в измерительном цикле зондирования в зависимости от реализуемого отношения сигнал / шум + недокомпенсированная пассивная помеха.
На фиг. 6 приведена укрупненная блок-схема ИД РЛС, в которой предусмотрено использование КНС в отсутствие и при наличии ЛЧМ несущей. На фиг.6 приняты следующие числовые обозначения основных функциональных элементов ИД РЛС:
1 - антенна;
2 - циркулятор;
3 - оконечный выходной СВЧ-усилитель мощности (ВУМ) зондирующих посылок;
4 - импульсный модулятор;
5 - формирователь СВЧ несущей и гетеродинного сигнала;
6 - высокостабильный генератор опорной частоты;
7 - формирователь импульсов запуска передатчика (ИЗП);
8 - многоотводная цифровая линия задержки (ЦЛЗ);
9 - схема бланкирования радиоприемника на время излучения зондирующих посылок;
10 - единый для всех радиоприемных каналов (РПрК) входной приемоусилительный блок;
11.1-11.N - схемы стробирования РПрК;
12.1…12.N - полосно-пропускающие фильтры (ППФ) промежуточной частоты (ПЧ);
13.1… 13.N - гребенчатые режекторные фильтры (ГРФ);
14.1…14.N - главные усилители сигналов промежуточной частоты (УПЧ);
15.1…15.N - аналого-цифровые преобразователи (АЦП);
16.1…16.N - буферные оперативные запоминающие устройства (ОЗУ);
17.1…17.N - сигнальные процессоры быстрого преобразования Фурье (БПФ);
18 - блок первичной обработки информации (ПОИ);
19 - блок вторичной обработки информации (ВОИ);
20 - цифровой вычислительный комплекс (ЦВК);
21 - синхронизатор.
На фиг. 7 приведена спектрограмма профильтрованной аддитивной смеси целевого и помеховых эхо-сигналов при условии оптимального выбора параметров модуляции КНС, полученная по результатам компьютерного имитационно-стохастического моделирования ИД РЛС. Приводимые указательные стрелки использованы для выделения спектрограмм частотных осцилляции профильтрованных помеховых (22) и целевого (23) эхо-сигналов.
Согласно [3 с. 166…170] достижение поставленной цели обеспечивается при условии выполнения требования к точности первичной дальнометрии обнаруженной цели, при которой в последующих циклах зондирования цель гарантированно располагается вне слепых участков дальности и находится в захватном стробе (в створе рабочего линейного участка временного дискриминатора) следящего измерителя дальности либо измерителя дальности на проходе. В этой связи в качестве критерийного показателя эффективности первичной дальнометрии обнаруженной цели принята нормированная погрешность измерений временных задержек целевых эхо-сигналов (целевой эхо-сигнал) в помеховых условиях рассматриваемого типа

где δτ - временное разрешение целевых эхо-сигналов, определяемое характеристиками модуляции КНС и, прежде всего, длительностью импульсов КНС;
Tи - период следования импульсов КНС в измерительном цикле зондирования;
h - скважность импульсов КНС;
qs/n - реализуемое отношение сигнал / (шум + помеха) по напряжению;
α - безразмерный коэффициент, определяемый типом применяемого локационного сигнала и методом его обработки [3…5].
Решение поставленной технической задачи, в первую очередь, сопряжено с реализацией приемлемых для дальностных измерений значений величины отношения сигнал / (шум + помеха). Это требование выполнимо при условии обеспечения инвариантной к временным сдвигам принимаемых сигналов эффективной доплеровской селекции целевых эхо-сигналов (целевой эхо-сигнал) на фоне ПП в измерительном цикле зондирования, необходимой для проведения оперативной однозначной оценки их временных запаздываний. Согласно [5 с. 377, 385, 386. 6 с. 152] такая возможность в помеховых условиях определяется осуществимостью минимизации интеграла свертки (2) до уровня, определяющего условие реализации в измерительном цикле зондирования повторного обнаружения и однозначного измерения временных сдвигов целевых эхо-сигналов (целевой эхо-сигнал) с требуемым качеством:

где Pп(τц,ƒц;S,AS) - мощность помехи на выходе подсистемы СДЦ в канале приемообработки целевого эхо-сигнала с времячастотным сдвигом (τц,ƒц);
NП(τ,ƒ) - энергетическая плотность распределения помехового фона на плоскости времячастотных сдвигов принимаемых локационных сигналов;
Ψ(τ,ƒ,S,AS) - функция времячастотной избирательности подсистемы СДЦ при использовании КНС S, которая в отличие от классической ФН учитывает операцию их противопомеховой весовой обработки AS (бланкирование переходных процессов, режекторного выбеливания помехи и весовой аподизации).
В отсутствие учета противопомеховой весовой обработки АS аналитическая запись ФН КНС с ЛЧМ имеет вид [5 с. 90…91, 247…250; 6 с. 143, 132, 133; 7 с. 86…89]:

где Ψ1(τ,ƒ) - ФН одиночного радиоимпульса КНС;
k - нумерация равноотстоящих максимумов ФН на временной оси τ;
Tп, Fп - соответственно период и частота следования импульсов КНС;
τи, N - соответственно длительность и суммарное количество радиоимпульсов КНС;
β - скорость (крутизна) ЛЧМ несущей частоты КНС.
Без ограничения общности вначале рассмотрим случай обнаружения ИД РЛС одиночной цели. В приложении к рассматриваемому типу КНС с ЛЧМ решение задачи безусловной оптимизации КНС (2) представлено формулой вида:

где Fи - значение ЧПИ КНС в измерительном цикле зондирования;
p - целочисленный параметр выбора ЧПИ КНС;
βи - скорость ЛЧМ несущей частоты КНС.
Физическая суть полученного решения очевидна с учетом выявленных закономерностей структурной организации ФН КНС с параметрами, определяемыми (4). Согласно (3, 4) и поясняющему фиг. 1, ввод ЛЧМ несущей частоты КНС с оптимизированными ЧПИ Fи и крутизной βи обуславливает сдвиговую линейно-наклонную деформацию исходной (в отсутствие ЛЧМ) ФН КНС (фиг. 1(б)), при которой ее локальные максимумы располагаются в узлах прямоугольной сетки позиционирования локальных максимумов исходной ФН немодулированного КНС (фиг. 1(a)). При настройке приемника РЛС на частоту целевого эхо-сигнала

Потенциально возможная обеспеченность требуемого качества СДЦ при вводе ЛЧМ несущей КНС подтверждается результатами расчетов функции частотно-скоростной избирательности приемника ИД РЛС, аналогом которой является Q-функция [6 с. 152…154] (согласно [5 с. 375…376] Tr - функция). Последняя является обобщенным показателем качества частотной селективной избирательности ИД РЛС. На фиг. 2 приведены графики Q-функции КНС с параметрами N=100, h=16 в отсутствие (сплошная) и при наличии ЛЧМ модуляции несущей (штриховая) для случаев использования противопомеховой весовой обработки пачки импульсов весовым окном Ханна (фиг. 2а)) и Дольфа-Чебышева (фиг. 2б)). Из приведенных графиков следует практически равнозначное качество доплеровской селекции целевых эхо-сигналов в отсутствие и при наличии ЛЧМ несущей взвешенного КНС с возможным незначительным ухудшением (фиг. 2а)) либо возрастанием (фиг. 2б)) этого качества в зависимости от типа весовой обработки (BS).
Отмечаемая на фиг. 2б) квазиплоская низинная область Q-функции КНС с ЛЧМ несущей не исключает возможность совместной дальнометрии двух и более целей не только с совпадающими скоростями, но и разноскоростных целей. Допустимый абсолютный и относительный скоростной разброс целей, совместно обслуживаемых в режиме дальностных измерений, составляет
где

ΔF - относительная частотная полоса эффективного помехоподавления селектором движущихся целей (СДЦ), определяемая нормированной относительно ЧПИ шириной квазиплоской низинной области Q-функции КНС с ЛЧМ несущей;


λ - рабочая длина волны ИД РЛС.
В отсутствие противопомеховой весовой обработки КНС с ЛЧМ несущей функция отклика согласованного по частоте настройки приемника фильтрового типа
где Tи - период следования импульсов в измерительном цикле зондирования;
Δƒлчм=βиTS - девиация несущей частоты КНС;
M - количество периодов следования КНС, в пределах которого допустима аппроксимация (5);
Ωτ - область повторного обнаружения (допоиска) и оценки временных запаздываний целевых эхо-сигналов;

Формируемые в точках с координатами


где
Графическая иллюстрация зависимости (6) представлена на фиг. 3(б), где также для качественного сравнения приведен график автокорреляционной функции (АКФ) регулярной КНС в отсутствие ЛЧМ с характерной невысокой крутизной спада уровня боковых лепестков (УБЛ), исключающей возможность идентификации главного максимума профильтрованного КНС и, как следствие, невозможность однозначной дальнометрии целей.
На основании (6) и фиг. 3 можно сделать вывод о возможности с вводом предлагаемой частотной модуляции СВЧ несущей КНС реализовать эффективное сжатие области трехдецибельного превышения уровня многолепестковой АКФ КНС, определяющей его разрешающую способность по временной координате, в KСЖ=N/h раз.
Для проведения однозначной дальнометрии цели, обнаруженной в измерительном цикле зондирования, необходимо идентифицировать главный максимум многолепесткового «сжатого» целевого эхо-сигнала (5). Методом максимального правдоподобия в [8 с. 169…171] решена аналогичная задача синтеза алгоритма оценки азимутальной координаты цели по принятой пачке радиоимпульсов, модулированных ДНА вращаемой антенны. Также известны и менее затратные в вычислениях методы координатометрии целей путем оценивания местонахождения энергетического центра тяжести (ЭЦТ) превысивших порог обнаружения локальных максимумов профильтрованного целевой эхо-сигнал [3 с. 256…257]. Однако, как показывают модельные оценки, при невысоких значениях величины отношения сигнал / шум + помеха (менее 20 дБ) и большой скважности импульсов КНС (свыше 10…15 ед) возможности идентификации главного максимума многолепесткового «сжатого» целевого эхо-сигнала этими методами недостаточны. Для усиления этих возможностей в сочетании с одним из указанных выше методов применим и успешно апробирован на имитационно-стохастической модели ИД РЛС метод, основанный на различии ЧПИ в обнаружительном и измерительном циклах зондирования [3 с. 272…273]. Согласно этому двухчастотному методу, поясняемому фиг. 4, по завершении в соответствии с [3 с. 256…257] либо [8 с. 169…171] операции предварительного малодостоверного низкоточного оценивания координаты энергетического центра тяжести (ЭЦТ) совокупности превысивших порог обнаружения локальных максимумов профильтрованного целевого эхо-сигнала производят уточнение сформированной дальномерной оценки. Это уточнение производится путем вычисления невязки полученной в обнаружительном цикле зондирования оценки неоднозначного временного сдвига целевого эхо-сигнала с каждой из совокупности сформированных в измерительном цикле зондирования подлежащих проверке однозначных оценок временных сдвигов энергетических центров тяжести (ЭЦТ) идентифицируемых локальных максимумов целевого эхо-сигнаа в измерительном цикле зондирования, которые зарегистрированы в области допустимой погрешности (доверительном интервале) предварительного низкоточного оценивания временного сдвига ЭЦТ обнаруженного целевого эхо-сигнала [3 с. 272…273].
На фиг. 5 приведен график (сплошная) условной (при условии обнаружения цели в измерительном цикле зондирования) вероятности правильной идентификации главного максимума многолепесткового «сжатого» целевого эхо-сигнала в зависимости от отношения сигнал / шум + помеха. Приводимый график получен для случая совместного использования предварительной малодостоверной селекции главного максимума по методу [8 с. 169…171] и рассмотренного выше метода двухчастотной идентификации главного максимума целевого эхо-сигнала в измерительном цикле зондирования при неблагоприятном для идентификации условии достаточно большой скважности импульсов КНС h=16 и выполнения неравенства вида

На фиг. 5 также приведен график (пунктирная) вероятности обнаружения и правильной предварительной идентификации главного максимума многолепесткового «сжатого» нефлуктуирующего целевого эхо-сигнала по методу [8 с. 169…171] в зависимости от отношения сигнал / шум + помеха для тех же начальных условий.
Применительно к прототипу, в котором реализованы корреляционно-фильтровой метод и схемотехническое решение времячастотной обработки КНС [1…4, 9], однозначное оценивание временного сдвига профильтрованного целевого эхо-сигнала по рассматриваемому способу производится с использованием сформированных в измерительном цикле зондирования оценок однозначного частотного


где Z(m,n) - квадратированные сигнальные отсчеты профильтрованного целевого эхо-сигнала на выходе матричного приемника;
ent - операция взятия наименьшего целого от частного
(m,n) - двухиндексная нумерация подканалов узкополосной доплеровской фильтрации, равноинтервально распределенных в каждом канале стробирования принимаемых сигналов в поисковой частотной полосе с шагом, равным ЧПИ в измерительном цикле зондирования;
(m*,n*) - двухиндексный номер подканала узкополосной доплеровской фильтрации матричного приемника с максимальным энергетическим пиковым уровнем корреляционно-фильтрового отклика профильтрованного целевого эхо-сигнала;

m - нумерация входящих в каждый канал стробирования подканалов узкополосной доплеровской фильтрации, равноинтервально распределенных в поисковой частотной полосе с шагом, равным ЧПИ в измерительном цикле зондирования;
n - нумерация каналов стробирования принимаемых сигналов;
Мб, Mд - соответственно целочисленное количество неоднозначных дальностных интервалов до ближней (Rб) и дальней (R∂) границы диапазона дальностных измерений

VС - скорость света в свободном пространстве.
Соответствующие оценки производятся с использованием энергетических (квадратированных) сигнальных отсчетов профильтрованного целевого эхо-сигнала по выходу системы многоканальной доплеровской фильтрации сигналов в каждом стробируемом радиоприемном канале (РПрК). Формализованная запись многоканальной времячастотной обработки принимаемых сигналов, адаптированной к характеристикам используемого КНС ЛЧМ, представлена выражением вида
где Z(m,n) - квадратированные сигнальные отсчеты профильтрованного целевого эхо-сигнала на выходе системы многоканальной доплеровской фильтрации;

C[(t-n⋅τС), Ти, τи] - пачка видеоимпульсов стробирования принимаемых сигналов в n-м РПрК;
τс - временное рассовмещение смежных видеоимпульсов стробирования РПрК;
Ти, τи - период следования и длительность видеоимпульсов стробирования;
BS - весовая функция противопомеховой оконной обработки КНС;

Согласно (9), в отличие от прототипа во всех каналах стробирования демодулированных КНС их узкополосная доплеровская фильтрациия производится на прореженном эквидистантном ряде частот

Следует отметить, что в случае обнаружения ИД РЛС распределенных по дальности двух и более целей, не разрешаемых по углам и скорости, рассматриваемый способ также применим, так как их целевые эхо-сигналы распределены по разным каналам стробирования приемника и их взаимопересечение маловероятно.
С учетом шумовой погрешности временных измерений в измерительном цикле зондирования


Наличие бланкирования приемника РЛС на время излучения зондирующих посылок (τбл≈τи) может привести к пропуску целевого эхо-сигнала в измерительном цикле зондирования цели. В этой связи требуется предусмотреть возможность проведения повторного цикла зондирования цели при ее гарантированном нахождении вне бланкируемого участка дальности. Отмеченное условие выполняется при расчетной задержке повторного измерительного цикла зондирования относительно первого

где τби - длительность импульсов бланкирования приемника на время излучения зондирующих посылок;
ƒ0 - рабочая частота ИД РЛС.
Адаптированный к реализуемому в прототипе ИД РЛС корреляционно-фильтровому методу приемообработки локационных сигналов [1…4, 9] рассматриваемый способ первичных дальностных измерений (за исключением подготовительных измерений и обзорно-поисковых рабочих циклов зондирования) характеризуется следующей очередностью последовательно выполняемых операций в измерительном цикле зондирования:
демодуляция КНС с использованием ЛЧМ гетеродинного сигнала;
многоканальное стробирование квазистационарной части демодулированного КНС с использованием пачек перекрывающихся стробов дальности;
внутриканальная (в каждом канале стробирования КНС) частотная режекция помеховых эхо-сигналов нулевой доплеровской частоты;
противопомеховая оконная весовая обработка отрежектированной КНС;
многоканальная доплеровская фильтрация КНС, в процессе которой производится спектральный анализ аподизированной (подвергнутой весовой обработке) КНС на выборочном эквидистантном ряде частот;
пороговая обработка и регистрация сигналов превышения первичного энергетического порога, порождаемых локальными максимумами профильтрованных целевых эхо-сигналов и возможными шумопомеховыми выбросами;
селекция (идентификация) главных максимумов отфильтрованных эхо-сигналов, реализуемая, например, по критерию минимума невязки выходных сигнальных отсчетов в обнаружительном и измерительном циклах зондирования;
оценка частотно-временных сдвигов целевого эхо-сигнала обнаруженных целей, пересчитываемых в искомые дальности до обнаруженных целей.
На фиг. 6 приведена упрощенная версия блок-схемы построения ИД РЛС, скорректированной в соответствии с предлагаемым способом первичной дальнометрии. Принцип построения и функционирования ИД РЛС по приводимой блок-схеме аналогичнен рассмотренным в прототипе [3, 4] за исключением их корректировки, связанной с вводом вышерассмотренных операций.
Блок-схемное построение ИД РЛС предусматривает возможность ее многоэтапного многорежимного функционирования:
- на подготовительном этапе, предшествующем выполнению обзорно-поисковых операций, производится формирование помеховой «карты» [4, 8], которая может периодически обновляться и уточняться на последующих этапах работы ИД РЛС;
- на этапе выполнения обзорно-поисковых операций - последовательное во времени лоцирование поискового пространства в разрешаемых угловых направлениях с традиционным использованием регулярных КНС разной высокой ЧПИ в отсутствие частотной модуляции их СВЧ несущей;
- на этапе первичных дальностных измерений обнаруженных целей их повторное лоцирование в соответствии с предлагаемым способом.
Организация функционирования ИД РЛС в перечисленных режимах осуществляется путем соответствующего конфигурирования ее аппаратного и программного обеспечения, изменения начальных установок параметров формируемых зондирующих и служебно-технологических (командно-управляющих) сигналов, а так же характеристик приемообработки регистрируемого потока локационных сигналов. В кратком изложении организация функционирования ИД РЛС характеризуется следующими особенностями, обусловленными реализуемым способом первичной дальнометрии целей.
На подготовительном этапе в отсутствие излучения РЛС производятся измерения начальных уровней внутриканальных шумов РПрК РЛС, а затем при включенном передатчике и сканировании приемопередающим лучом антенны в заданном рабочем секторе с использованием КНС с монохромной несущей в режиме низкой ЧПИ с предельно малой длительностью зондирующих посылок производится измерение энергетических уровней мешающих отражений (помеховой «карты») в зоне обзора ИД РЛС [4 с. 298…303; 7 с. 129…130]. Спектрально-энергетические измерения внутриканальных шумов РПрК и помеховых переотражений осуществляются с использованием линейной матрицы цифровых сигнальных процессоров (ЦСП) БПФ (см. фиг. 6, блоки 17.1…17.N) с установкой от ЦБК 20 количества сигнальных отчетов, типа оконной противопомеховой обработки, частотного разрешения и полосы спектрального анализа. В указанном режиме обеспечивается однозначность дальностной и частотной разверток формируемого помехового «рельефа» и оценка блоком первичной обработки информации (ПОИ) 18 уровней загрубления чувствительности РПрК, запоминаемых в ЦВК 20.
Поиск и обнаружение целей в помехонасыщенных угловых направлениях с локально сосредоточенным энергетическим спектром ПП выполняется с применением КНС также с монохромной немодулированной несущей в режиме высокой ЧПИ, значение которой устанавливается ЦВК 20 из условия однозначных измерений доплеровских сдвигов эхо-сигналов обнаруживаемых целей

где λ - рабочая длина волны РЛС;
Vr max - максимально возможная скорость обнаруживаемых целей.
Излучение, прием и обработка КНС осуществляется по традиционной корреляционно-фильтровой схеме [1…4, 9]. В частности, согласно фиг. 6, в ИД РЛС для приема и корреляционно-фильтровой обработки локационных эхо-сигналов предусмотрен единый для всех РПрК матричного приемника приемо-усилительный блок 10, линейка стробируемых РПрК 11.1…11.N, в которых производится основное усиление сигналов, их предварительная полосовая частотная фильтрация блоками 12.1…12.N для выделения поискового диапазона доплеровских частот целевых эхо-сигналов, а также предварительная частотная режекция помеховых сигналов фильтрами 13.1…13.N. Каждый РПрК выходом подключен к АЦП 15.1…15.N, являющегося связующим элементом между РПрК и программируемыми ЦСП в составе БЗУ 16.1…16.N, многопроцессорной линейки спектрально-гармонических анализаторов БПФ с весовым окном по входу, линейки пороговых обнаружителей 17.1…17.N, измерителей частотных сдвигов локальных максимумов обнаруженного целевого эхо-сигнала. Частотная полоса процессоров БПФ 17.1…17.N по команде с ЦВК 20 устанавливается в зоне поиска целевых эхо-сигналов.
По установлению факта обнаружения цели блоком ПОИ 18 в текущем угловом элементе разрешения сектора обзора совместно с процедурой ее обнаружения в этом же блоке осуществляются необходимые для проведения последующего измерительного цикла зондирования первичные измерения, по результатам которых формируются оценки:
- однозначного доплеровского сдвига обнаруженного целевого эхо-сигнала

- неоднозначного временного сдвига обнаруженного целевого эхо-сигнала

Перечисленная измерительная информация поступает в ЦВК 20, где в соответствии с (4, 7, 10) пересчитывается в систему исходных данных и начальных установок функциональных элементов ИД РЛС для проведения в целевом угловом элементе разрешения дальностно-измерительного цикла зондирования с использованием КНС с модулированной СВЧ несущей.
Для реализации приемообработки эхо-сигналов в измерительном цикле зондирования в приводимом на фиг. 6 блок-схемном построении ИД РЛС также задействован классический корреляционно-фильтровой принцип обработки сигналов [1, 2, 9]. Согласно последнему в частотном преобразователе ПУБ 10 приемника ИД РЛС предусмотрена частотная демодуляция принимаемых сигналов в монохромные колебания ПЧ с сохранением их огибающей с использованием ЛЧМ гетеродинного сигнала, крутизна частотного свипирования которого аналогична ЛЧМ несущей зондирующего сигнала. Диапазон свипирования частоты гетеродина в составе формирователя 5 превышает значение девиации несущей частоты КНС и достаточен для демодуляции эхо-сигналов с максимально возможного удаления их источников от ИД РЛС. Благодаря этому удается обузить (компрессировать) спектр анализируемых эхо-сигналов и реализовать предварительную аналоговую частотную режекцию помеховых сигналов нулевой доплеровской частоты (НДЧ), обусловленных отражениями из ближней непросматриваемой зоны действия ИД РЛС.
С переходом в режим первичных дальностных измерений при сохранении многоканальной аналоговой аппаратной части подсистемы приемообработки сигналов программно-алгоритмическое обеспечение этой подсистемы претерпевает следующие изменения:
- по выходу каждого стробируемого РПрК в обзорно-поисковой корреляционно-фильтровой матрице осуществляемый с помощью линейной матрицы процессоров БПФ 17.1… 17. N спектральный анализ производится не из условия сплошного перекрытия поисковой частотной полосы в каждом стробируемом РПрК, а на прореженном выборочном эквидистантном ряде частот

- допоиск и измерение временного сдвига целевого эхо-сигнала осуществляется путем анализа в каждом отдельно взятом стробируемом РПрК энергетического рельефа эквидистантных (с шагом FИ) спектральных выборок на частотах ƒm.
В процессе обработки результатов многоканальной доплеровской фильтрации блоком ПОИ 18 формируются пороги обнаружения, селектируются сигналы превышения этих порогов, выделяется группа обнаруженных локальных максимумов профильтрованного целевого эхо-сигнала, селектируется главный максимум целевого эхо-сигнала, частотный сдвиг которого в соответствии с (8) пересчитывается ЦВК 20 в искомую однозначную дальность до цели.
На фиг.7 приведена полученная по результатам компьютерного имитационно-стохастического моделирования ИД РЛС спектрограмма аддитивной смеси помеховых и целевого эхо-сигналов при оптимальном выборе параметров КНС. В целях наглядной иллюстрации закономерности распределения на частотной оси энергетики целевых и помеховых эхо-сигналов спектрально-гармоническое преобразование Фурье проведено не на выборочном (в соответствии с (8)), а на непрерывном ряде частот. На спектрограмме отмечается периодическая (с шагом Fи) гребенчатая структура высокомощных помеховых максимумов и аналогичная структура максимумов маломощного целевого эхо-сигнала. Оптимальный выбор параметров КНС в соответствии с (4) обеспечивает благоприятное для обнаружения и параметрического оценивания расположения локальных максимумов целевого эхо-сигнала в провальной области огибающей боковых лепестков профильтрованных помеховых эхо-сигналов. В отличие от помеховых, локальные максимумы целевого эхо-сигнала характеризуются наличием амплитудной модуляции локальных максимумов по закону (sin x)/x, что соответствует (6) и позволяет селектировать главный максимум обнаруженного целевого эхо-сигнал по его яркостному контрасту. Точка центрирования обнаруженного целевого эхо-сигнала
Помимо вышеперечисленных к принципиально значимым особенностям приводимой спектрограммы, характеризующих корректность обоснования рассматриваемого способа первичной дальнометрии, следует отнести:
в сравнении с целевыми, помеховые максимумы более широкие из-за различия радиальных размеров локально-точечной цели и высокопротяженной помехоформирующей области, что соответствует выкладкам (3, 5) и графическим построениям Q-функции на фиг. 2;
левая часть периодограмм характеризуется более высоким уровнем недокомпенсированных остатков ПП (низинная провальная область приподнята на ~3-7 дБ), что обусловлено фактором уменьшения дальности просматриваемых участков дистанции, которые подвержены более интенсивному маскированию помеховыми отражениями;
вправо и влево от точки центрирования целевого эхо-сигнала отмечается незначительное снижение пиковых уровней помеховых максимумов в соответствии со структурой АКФ немодулированной КНС, качественная иллюстрация которой приведена на фиг. 3.
Таким образом, предлагаемый способ верифицирован, технически реализуем и обеспечивает недоступную для аналогов и прототипа возможность помехоустойчивой оперативной первичной дальнометрии обнаруженных целей за время одно-двукратного цикла их зондирования.
Изобретение выполнено на уровне технического предложения и реализовано на ПЭВМ в виде математической имитационно-стохастической модели ИД РЛС.
Результаты проведенных численных модельных экспериментов подтверждают работоспособность и реализуемость помехоустойчивой оперативной дальнометрии обнаруживаемых ИД РЛС целей на фоне мощных ПП с локально-сосредоточенным энергетическим спектром с точностью, соизмеримой с точностью дальностных измерений нониусным методом с многократным перебором используемых ЧПИ.
Изобретение может быть применено в ИД РЛС для решения задач взятия на сопровождение (низкоточного трассового либо высокоточного с использованием замкнутой следящей системы) обнаруживаемых целей в условиях ПП с локально-сосредоточенным энергетическим спектром, и прежде всего, в условиях воздействия интенсивных маскирующих отражений от подстилающей поверхности, местных предметов и малоподвижных метеообразований.
Литература
1. Справочник по радиолокации. Под ред. М. Сколника, т. 3. М.: Сов. радио. 1979 (с. 383, 369).
2. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. Под общей ред. B.C. Вербы. В 2-х книгах. Книга 1. М.: Техносфера, 2015 (с. 207…211, 186).
3. Оценивание дальности и скорости в радиолокационных системах. Часть 1. Под редакцией А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2004 (с. 259…263, 271…274, 255…257).
4. Трухачев А.А. Радиолокационные сигналы и их применение. - М.: Воениздат. 2005 (с. 234…240, 241…261).
5. Ч. Кук, М. Бернфельд. Радиолокационные сигналы. Теория и применение. Перевод с английского под редакцией B.C. Кельзона. М.: Сов. радио 1971 (с. 90…91, 245…250, 374…383).
6. Справочник по радиолокации. Под ред. М. Сколника, т. 1. М.: Сов. радио. 1976 (с. 143, 150…154).
7. Орленко В.М., Ширман Я.Д. Тела рассогласования частотно-манипулированных сигналов со ступенчатым изменением частоты. Научно-технические серии. Выпуск 111, 2000. Радиолокация и радиометрия №2. Редактор выпуска д.т.н. проф. Я.Д. Ширман. - М.: «Радиотехника». 2000 (с. 86…89).
8. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. Киев: Издательство КВЕЦ, 2000 (с. 166…167, 130).
9. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981 (с. 117…119).
Реферат
Изобретение относится к технике первичных дальностных измерений импульсно-доплеровских радиолокационных станций (ИД РЛС). Достигаемый технический результат - повышение помехоустойчивости первичной дальнометрии обнаруженной одиночной либо не разрешаемой по углу и скорости группы рассредоточенных по дальности целей, которые предварительно обнаружены на фоне интенсивных пассивных помех (ПП) с узкополосным энергетическим спектром, например отражений от подстилающей поверхности земли, местных предметов и малоскоростных метеообразований. Указанный результат достигается использованием в измерительном цикле зондирования адаптированных к фоноцелевой обстановке квазинепрерывных сигналов с оптимизированными параметрами модуляции и характеристиками приемообработки локационных сигналов. Благодаря этому обеспечивается типовая для ИД РЛС эффективная доплеровская селекция целей на фоне ПП с возможностью их первичной дальнометрии за один-два цикла зондирования с точностью, соизмеримой с точностью дальностных измерений нониусным методом с многократным перебором используемых частот повторения импульсов. 3 з.п. ф-лы, 7 ил.
Формула












Комментарии