Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех - RU2764781C1
Код документа: RU2764781C1
Чертежи





Описание
Предлагаемое изобретение относится к области цифровой обработки радиолокационных сигналов и может быть использовано в радиолокационной станции (РЛС) для формирования при сопровождении воздушной цели (ВЦ) из класса «самолет с турбореактивным двигателем (ТРД)» достоверной идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия их воздействия и оценки радиальных функционально-связанных координат (ФСК) взаимного перемещения ВЦ и носителя РЛС при различных вариантах воздействия таких помех.
Известен способ сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех [1], заключающийся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) ее силовой установки, определяются отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, и отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, которые поступают на вход фильтра совместного сопровождения ВЦ и первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с процедурой (1а)-(6а) многомерной линейной дискретной калмановской фильтрации в соответствии с уравнениями [1]






где
k=0,1, …, К, …, - номер такта работы фильтра;

Φ(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - КМ шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов; I - единичная матрица;


Н(k+1) - матрица наблюдения;
Y(k) - вектор наблюдения;
Z(k+1) - матрица невязок измерения;
Ψ(k+l) - матрица априорных ошибок фильтрации;
"-1" - операция вычисления обратной матрицы;
"т" - операция транспонирования матрицы,
определяется оценка разности





свидетельствует соответственно об отсутствии или воздействии уводящей по скорости помехи, измеряется дальность до ВЦ, в соответствии с процедурой (1а)-(6а) осуществляется формирование оценки дальности,





где



одновременное выполнение условий (8а) и (10а) свидетельствует об отсутствии уводящих по скорости и дальности помех, в этом случае оценки дальности






Недостатком данного способа сопровождения ВЦ является низкая достоверность идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия такого воздействия и оценки радиальных ФСК взаимного перемещения ВЦ и носителя РЛС при различных вариантах воздействия таких помех вследствие:
1. Допущения о линейном характере зависимости ФСК от времени, в то время как фактически динамика ФСК носит нелинейный характер.
2. Не оптимальности, определяемых на его основе оценок ФСК, так как они находятся при условии справедливости гипотезы о фактическом варианте воздействия уводящих помех, которая носит вероятностный характер, а значит, оценки являются условно-оптимальными.
3. Отсутствия возможности комплексирования информации РЛС, измеряющей ФСК, и индикатора (обнаружителя) варианта воздействия уводящих помех.
4. Отсутствия возможности учитывать априорные данные о смене варианта воздействия уводящих помех.
5. Отсутствия адаптации системы наблюдения к различным вариантам воздействия уводящих помех.
Известен способ сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех [2], заключающийся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса КНД ее силовой установки, определяются отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, и отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, выделенные отсчеты доплеровских частот поступают на вход многоканального фильтра совместного сопровождения ВЦ и первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы













основанной на априорных данных в виде математической модели (ММ) системы «ВЦ - РЛС - индикатор» со случайной скачкообразной структурой (ССС), включающей модели линейной динамики радиальных ФСК взаимного перемещения носителя РЛС и ВЦ

их измерений в РЛС

смены варианта воздействия уводящих помех

индикатора варианта воздействия уводящих помех

неуправляемых случайных возмущений и помех

при начальных условиях

где
k - дискретный момент времени;
xk - вектор радиальных ФСК взаимного перемещения носителя РЛС и ВЦ;

zk - вектор измерений РЛС;






Gk, Qk - КМ соответственно векторов шумов возбуждения Fkξk и помех Ek(sk)ζk;
ξk, ζk - стандартные дискретные векторные белые шумы;
Θk(sk) - условная КМ измерения при фиксированном варианте воздействия уводящих помех;
Ak, Fk - известные матрицы коэффициентов;
Ck(sk), Ek(sk) - известные матрицы детерминированных функций от варианта воздействия уводящих помех sk;

Т - операция транспонирования матрицы;
detΘk(sk) - определитель матрицы Θk(sk);
ехр[⋅] - экспоненциальная функция,
определяется оценка










где индексы «п» и «к» относятся соответственно к планерной и первой компрессорной составляющим спектра, отраженного от ВЦ сигнала;
D(t), Vсбл(t), aп(t) - радиальные ФСК соответственно дальность, скорость и ускорение сближения носителя РЛС с ВЦ;
Vп(t), Vк(t) - детерминированные составляющие радиальных скоростей сближения носителя РЛС с ВЦ;
ΔVп(t), ΔVк(t) - флюктуационные составляющие радиальных скоростей сближения носителя РЛС с ВЦ;
aп(t), aк(t) - флюктуационные составляющие радиальных ускорений;
αп, αк, - величины, обратные времени корреляции скоростных флюктуации взаимного перемещения носителя РЛС и ВЦ;
βп, βк - квадраты собственных частот скоростных флюктуации взаимного перемещения носителя РЛС и ВЦ;
σп, σк - среднеквадратические отклонения (СКО) флюктуации ускорения взаимного перемещения носителя РЛС и ВЦ;
nп(t), nк(t) - формирующие нормированные белые гауссовские шумы;
D0, Vп0, Vк0, ΔVп0, Δк0, ап0, ак0 - начальные значения соответственно дальности до ВЦ, детерминированных и флюктуационных составляющих радиальных скоростей, флюктуационных составляющих радиальных ускорений,
представляемой в процедуре (11а)-(23а) матрицами Ak и Fk, размерностями 7×7, ненулевыми элементами которых являются соответственно a11=a22=a33=а55=а66=1; a12=a13=-Δt; a34=a67=Δt; a44=1-anΔt; a77=1-aкΔt; a43=-βпΔt; a76=-βкΔt;












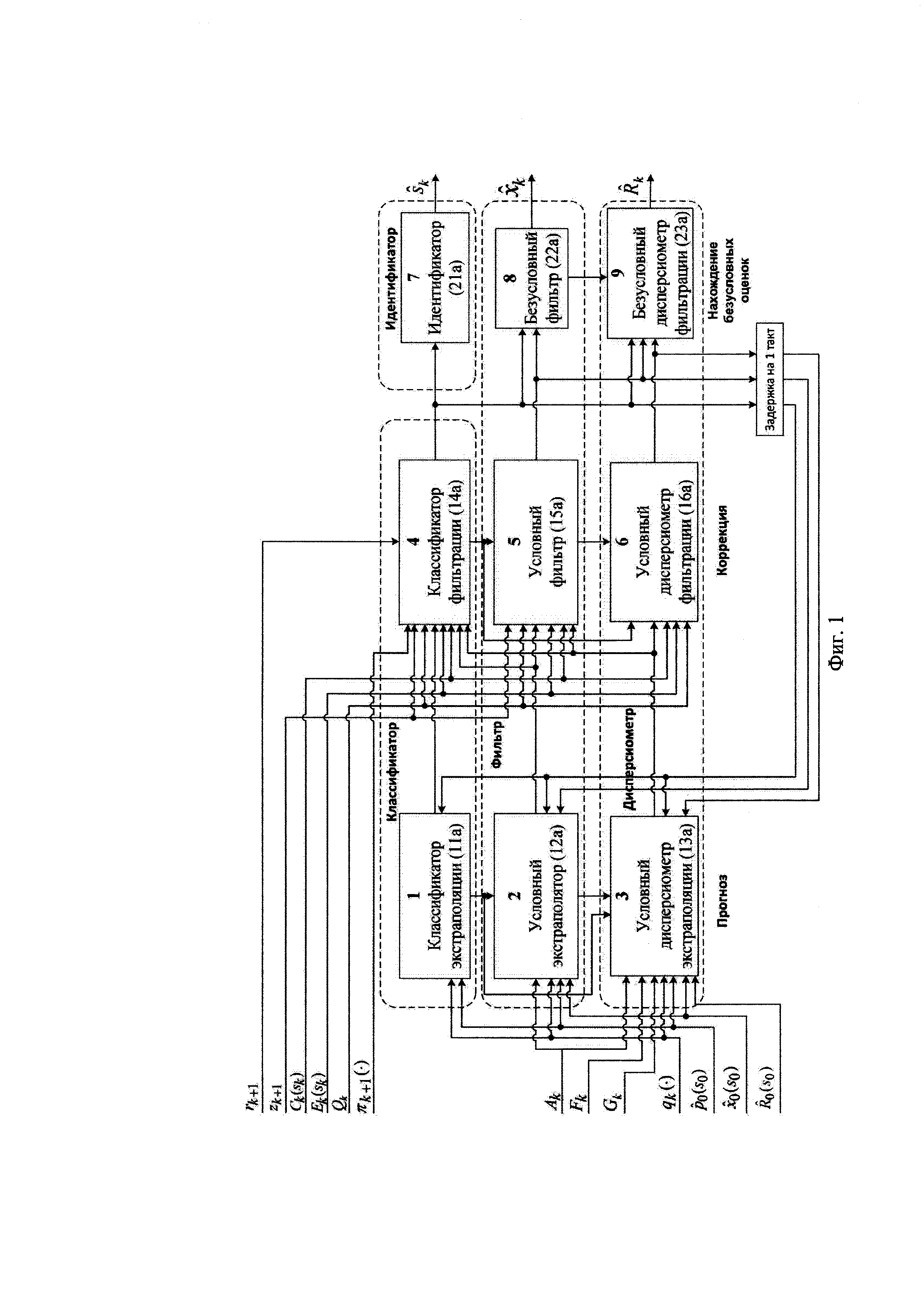
На фиг. 1 приведена блок-схема, поясняющая реализацию известного способа сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех [2].
Недостатком данного способа сопровождения ВЦ является низкая достоверность идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия такого воздействия и оценки радиальных ФСК взаимного перемещения ВЦ и носителя РЛС при различных вариантах воздействия таких помех вследствие:
1. Допущения о линейном характере зависимости ФСК от времени, в то время как фактически динамика ФСК носит нелинейный характер.
2. Допущения о статистической независимости смены вариантов воздействия уводящих помех от ФСК, в то время как фактически вероятности смены таких вариантов зависят от фазовых координат, в частности, с сокращением дальности до цели возрастают вероятности переходов к варианту совместного воздействия уводящих по дальности и скорости помех.
3. Допущения о нормальности аппроксимирующей условной плотности вероятности ФСК при фиксированном варианте воздействия уводящих помех - значительное отличие вида фактической плотности вероятности ФСК от нормального вида аппроксимирующей плотности приводит к возрастанию ошибок оценивания.
Цель изобретения - повышение достоверности идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия их воздействия и оценки радиальных функционально-связанных дальности до ВЦ и скорости сближения носителя РЛС с нею путем адаптивной двухмоментной параметрической аппроксимации неизвестных плотностей вероятности ФСК смесью априорно задаваемых аппроксимирующих функций и приближением получаемых оценок к их оптимальным значениям за счет учета нелинейностей в динамике ФСК и их измерений, учета статистической зависимости вероятностей смены вариантов воздействия уводящих помех от ФСК, комплексирования информации РЛС и индикатора варианта воздействия уводящих помех, учета априорных данных о смене этих вариантов и адаптации системы наблюдения к ним.
Для достижения цели в способе сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех [2], заключающемся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса КНД ее силовой установки, определяются отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, и отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, выделенные отсчеты доплеровских частот дополнительно поступают на вход многоканального фильтра совместного сопровождения ВЦ и первой компрессорной составляющей спектра сигнала и идентификации варианта воздействия уводящих помех, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния условно-марковской структуры нелинейной стохастической динамической системы при наблюдении без запаздывания [3] в соответствии с функциональными интегральными рекуррентными уравнениями



























которые после выполнения процедуры аппроксимации (выдвижения гипотезы относительно видов аппроксимирующих функций) в соответствии с выражениями














замыкаются (число неизвестных становится равным числу уравнений), интегралы в правых частях уравнений выражаются через элементарные или табулированные функции, а сами уравнения вырождаются в следующие обыкновенные рекуррентные уравнения относительно условных вероятностей воздействия уводящих помех в различных вариантах (состояний структуры) при фиксированном наборе аппроксимирующих функций, условных МО функционально-связанных координат и КМ ошибок их оценивания при фиксированных варианте набора аппроксимирующих функций и варианте воздействия уводящих помех:



























основанной на априорных данных в виде ММ системы «ВЦ - РЛС - индикатор» со ССС, включающей, в общем виде, нелинейную модель динамики радиальных ФСК - дальности до цели, планерных и компрессорных составляющих радиальных скоростей и ускорений взаимного перемещения носителя РЛС и ВЦ

нелинейную модель измерений этих ФСК в РЛС

условно-марковскую модель смены варианта воздействия уводящих помех

условно-марковскую модель индикатора варианта воздействия уводящих помех

модель неуправляемых случайных возмущений и помех

при начальных условиях

где
n = (n1, n2, n3, n4, n5) - вектор порядковых номеров видов аппроксимирующих функций, определяет вариант набора аппроксимирующих функций;







N - число альтернативных наборов видов аппроксимирующих функций;
N1, N2, N3, N4 и N5 - число элементов множеств соответственно Φ, Ψ, Θ, P и F;
k - дискретный момент времени;
xk = (D, Vп,k, ΔVп,k, ап,k, Vк,k, ΔVк,k, ак,k)Т - вектор радиальных ФСК, включающих радиальные дальность до ВЦ, планерные и компрессорные составляющие радиальных скорости и ускорения взаимного перемещения носителя РЛС и цели;


ξk, ζk - векторы соответственно случайных возмущений, действующих на ВЦ, и помех, воздействующих на РЛС;
ϕ(⋅) и ψ(⋅) - известные, в общем виде, нелинейные векторные детерменированные функции случайных аргументов;

Φ(ξk, ζk) - совместная функция распределения возмущений и помех;

Φ(ξk) - функция распределения возмущений;
ƒ(xk,sk) - совместная плотность вероятности ФСК и варианта воздействия уводящих помех;








nx, nz - размерности соответственно векторов ФСК и их измерений;







Т - операция транспонирования матрицы;
ехр{⋅} - экспоненциальная функция;
i - мнимая единица;
ω - частота;
Г: - статистическая гипотеза, заключающаяся в том, что …;
ϕ(sk+1, xk, sk, ξk) → Φ: - в (28), выбор для заданной функции ϕ(sk+1, xk, sk, ξk) множества Φ видов аппроксимирующих функций







→ F - выбор множества F видов аппроксимирующих функций




{Φ, Ψ, Θ, P, F}: - совокупность множеств видов аппроксимирующих функций таких, что …;














n(s) - мощность (число элементов) множества вариантов воздействия уводящих помех;
xmin(s0) и xmах(s0) - вектора соответственно минимальных и максимальных значений ФСК при фиксированном варианте воздействия уводящих помех в начальный момент времени;
xmin i(s0) и xmах i(s0) - i-e компоненты векторов соответственно минимальных и максимальных значений ФСК при фиксированном варианте воздействия уводящих помех в начальный момент времени,
определяется оценка



При этом, в качестве аппроксимирующих распределений предлагаются четырех-параметрические распределения Пирсона при известности (заданности) любых двух из его параметров [его частные случаи: гауссовское, усеченное гауссовское, бета-распределение (и его частные случаи: закон арксинуса, равномерное и степенное распределения), гамма-распределение (и его частные случаи: показательное и показательно-степенное распределения, χ2 - распределение, закон Эрланга), Т-распределение Стьюдента], а также такие двухпараметрические распределения, как закон Симпсона, Релея, Максвелла, Парето, логистическое распределение и F-распределение Фишера [3].
Новыми признаками, обладающими существенными отличиями, являются:
1. Применение многоканального, как по числу вариантов воздействия уводящих помех, так и по числу вариантов набора аппроксимирующих функций, фильтра совместных оценивания радиальной дальности до цели, планерной и первой компрессорной составляющих радиальных скорости и ускорения взаимного перемещения носителя РЛС и цели, и распознавания варианта воздействия уводящих помех, функционирующего в соответствии с процедурой (1)-(74) квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния условно-марковской структуры нелинейной стохастической динамической системы при наблюдении без запаздывания вместо одноканального, по числу вариантов набора аппроксимирующих функций, фильтра, функционирующего в соответствии с процедурой многомерной линейной дискретной калмановской фильтрации [1], и вместо одноканального, по числу вариантов набора аппроксимирующих функций, фильтра, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы при наблюдении без запаздывания на основе двухмоментной параметрической аппроксимации нормальным законом распределения [2, 3].
2. Автоматический выбор (51)-(56)набора видов аппроксимирующих функций из априорно задаваемых множеств (28), (31), (34), (36), (38) таких функций непосредственно в процессе функционирования фильтра.
3. Автоматическое формирование (57)-(61) набора смесей аппроксимирующих функций из априорно задаваемых множеств таких функций непосредственно в процессе функционирования фильтра.
4. Совместное оценивание ФСК (42), (43), (45), (46), (48), (49), (63), (64) и распознавание варианта воздействия уводящих помех (41), (44), (47), (62) на основе двухмоментной параметрической аппроксимации [3] в N многоканальных, по числу вариантов воздействия уводящих помех, квазиоптимальных фильтрах, отличающихся набором видов аппроксимирующих функций





5. Комплексирование измерений РЛС с моделью (70) и показаний индикатора варианта воздействия уводящих помех с моделью (72).
6. Адаптация фильтра к различным вариантам воздействия уводящих помех с одновременным уточнением используемых математических моделей.
7. Прогнозирование (41) вероятностей
8. Прогнозирование (42) условных математических ожиданий



9. Прогнозирование (43) условных КМ

10. Оценивание (44) апостериорных вероятностей



11. Оценивание (45) условных апостериорных математических ожиданий
12. Оценивание (46) условных апостериорных КМ

13. Идентификация (47) такого
14. Нахождение (48) безусловной, по отношению к вариантам воздействия уводящих помех, оценки ФСК

15. Нахождение (49) безусловной по отношению к вариантам воздействия уводящих помех КМ

16. Коррекция (50) апостериорных вероятностей



17. Идентификация (51)-(56)такого варианта набора аппроксимирующих функций (моделей)

18. Оценивание (57)-(61) набора моделей соответственно динамики ФСК ϕ(⋅) их измерений в РЛС ψ(⋅), смены варианта воздействия уводящих помех q(⋅), индикатора воздействия уводящих помех и условной плотности вероятности ФСК при фиксированном варианте воздействия уводящих помех




19. Идентификация (62) варианта

20. Оценивание (63) ФСК

21. Оценивание (64) безусловной по отношению к вариантам набора аппроксимирующих функций КМ

22. Принятие равновероятными (66) и равномерными (67), (68), начальных условий (74), при отсутствии дополнительных априорных данных, соответственно для варианта воздействия уводящих помех и ФСК взаимного перемещения носителя РЛС и цели, как обладающих наибольшей мерой неопределенности (энтропией) соответственно среди дискретных и непрерывных законов распределения.
Данные признаки являются существенными и в известных технических решениях не обнаружены.
Применение всех новых существенных признаков позволит достоверно идентифицировать совместное или раздельное воздействие уводящих по дальности и скорости помех с одновременным формированием достоверных безусловных оценок дальности до ВЦ и скорости сближения носителя РЛС с нею путем адаптивной двухмоментной параметрической аппроксимации неизвестных плотностей вероятности ФСК набором смесей априорно задаваемых видов функций за счет учета нелинейностей в динамике ФСК и их измерений, учета статистической зависимости вероятностей смены вариантов воздействия уводящих помех от ФСК, комплексирования информации РЛС и индикатора (обнаружителя) варианта воздействия уводящих помех, учета априорных данных о смене этих вариантов и адаптации системы наблюдения к ним.
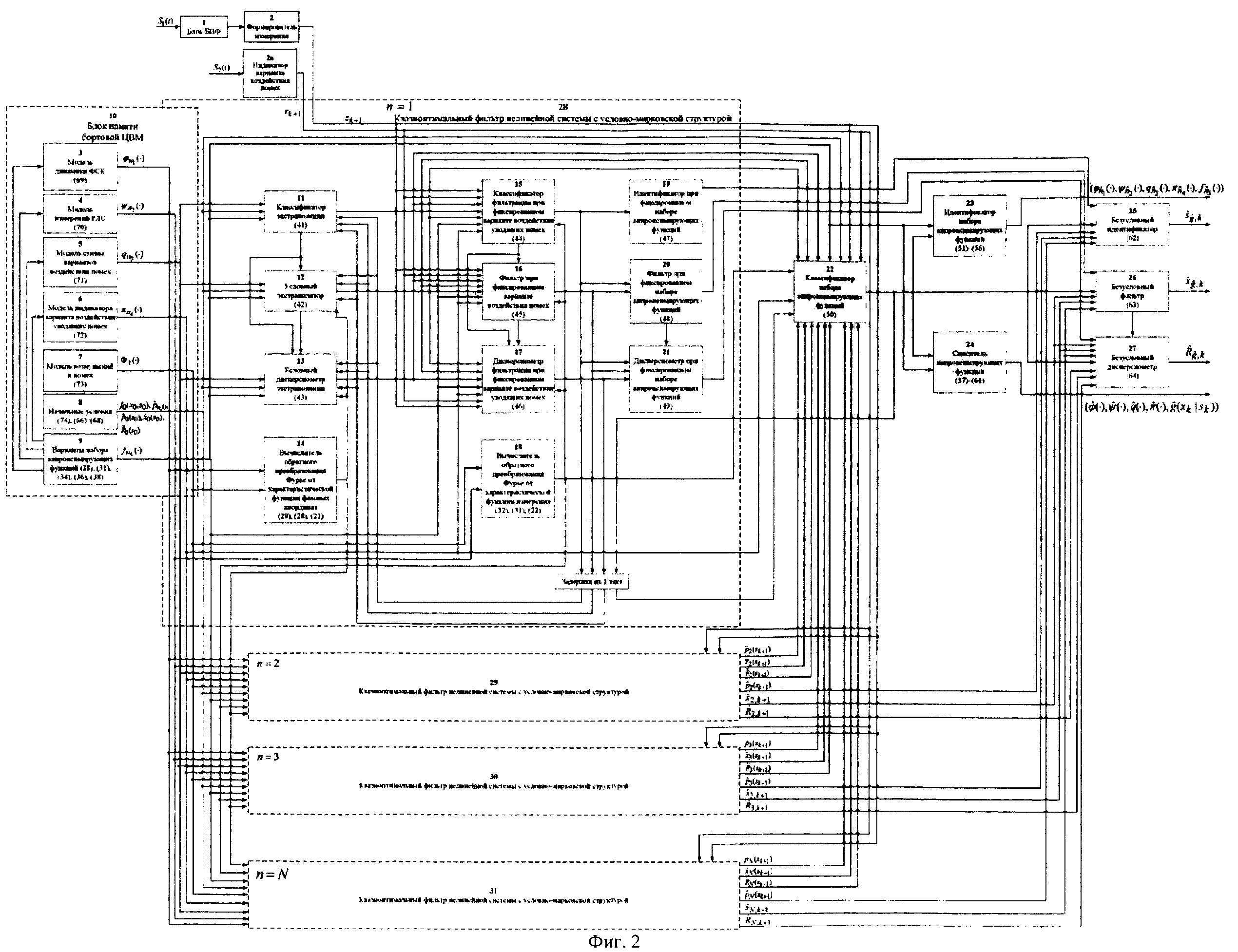
На фиг. 2 приведена блок-схема, поясняющая реализацию предлагаемого способа сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех.
Способ сопровождения ВЦ из класса «самолет с ТРД» и идентификации уводящих по дальности и скорости помех осуществляется следующим образом.
На вход известного блока 1 БПФ, используемого в [1], на промежуточной частоте с выхода приемника РЛС поступает сигнал S1(t), отраженный от ВЦ, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся частей КНД ее силовой установки.
В известном формирователе 2 измерения, используемом в [1], во-первых, определяется отсчет доплеровской частоты Fп(k+1), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, во-вторых, данный отсчет доплеровской частоты преобразуется в значение скорости, как Vп(k+1) = λFп(k+1)/2 (где λ - рабочая длина волны РЛС), в-третьих, поступающее на вход измерение дальности в непрерывном времени D(t) преобразуется в дискретные отсчеты дальности D(k+1), в-четвертых, определяется отсчет доплеровской частоты Fк(k+1), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, в-пятых, данный отсчет доплеровской частоты преобразуется в значение скорости, как Vк (k+1) = λFк(k+1) / 2.
В результате на выходе блока 2 формируется измерение zk+1 = (D(k+1), Vп(k+1), Vк(k+1))Т которое совместно с выходными показаниями индикатора 2а поступают на вход нового многоканального фильтра 28, 29, 30, 31 совместного оценивания радиальных дальности до ВЦ, планерных и компрессорных составляющих радиальных скорости и ускорения взаимного перемещения носителя РЛС и цели, фильтра, каждый канал которого функционирует в соответствии с известной процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния условно-марковской структуры нелинейной стохастической динамической системы при наблюдении без запаздывания, структурная схема которой и описание приводятся в [3], и отличается только вариантом набора аппроксимирующих функций, положенным в основу этой процедуры. Многоканальный фильтр работает на основе априорных данных (69)-(74) в виде ММ системы «ВЦ -РЛС - индикатор» со ССС, включающей (блок 10 памяти бортовой ЦВМ) нелинейную модель динамики радиальных ФСК 3 взаимного перемещения носителя РЛС и ВЦ, представленную функцией модель их измерений в РЛС 4, представленную функцией ϕk(⋅), модель смены варианта воздействия уводящих помех 5, представленную переходными вероятностями qk(⋅), модель индикатора варианта воздействия уводящих помех 6, представленную переходными вероятностями πk+1(⋅), модель неуправляемых случайных возмущений и помех 7, представленную совместной функцией распределения Φk(⋅), при начальных ƒ0(x0, s0),



Сформированные на выходе многоканального фильтра 28, 29, 30, 31 прогнозируемые на один шаг дискретности вперед вероятности









В результате на выходе блока 22 формируются вероятности
Помимо этого на вход идентификатора 23 и смесителя 24 поступают множества Φ, Ψ, Θ, Р и F видов аппроксимирующих функций 9, а на входы идентификатора 25, фильтра 26 и дисперсиометра 27 с выходов многоканального фильтра 28, 29, 30, 31 поступают соответственно апостериорные вероятности













Сформированные на выходе идентификатора 23 оценка




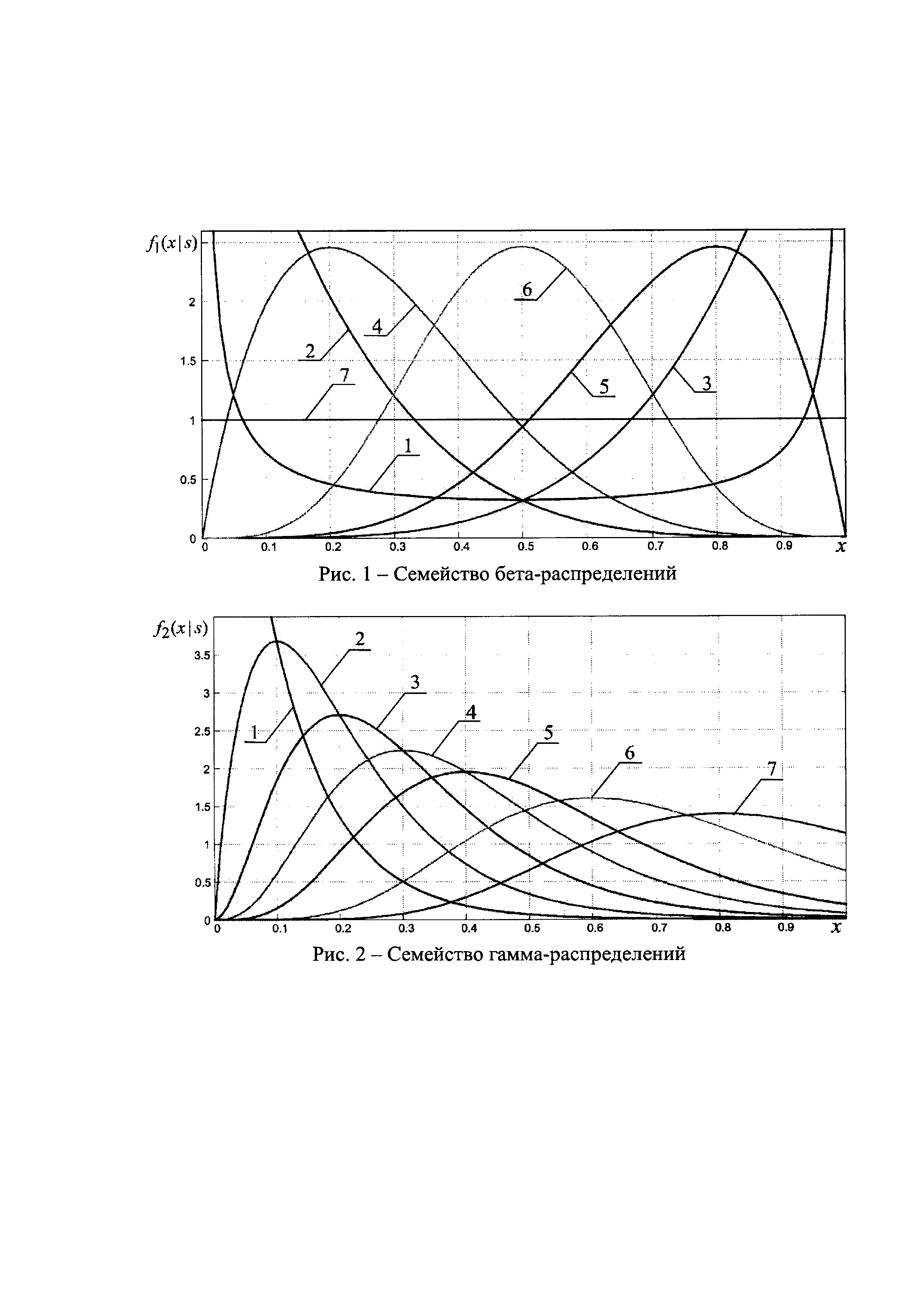
На фиг. 3 приведен пример семейства плотностей вероятности бета- (рис. 1) и гамма- (рис. 2) распределений (значения параметров распределений представлены соответственно в табл. 1 и 2), которые рассматриваются в качестве элементов множества F альтернативных условных плотностей вероятности ФСК при фиксированном варианте воздействия уводящих помех (38), а также конкретных реализаций этих альтернативных аппроксимирующих плотностей (рис. 3, 5, 7, 9) и соответствующих им семейств смесей (87 г) из этих плотностей (рис. 4, 6, 8, 10) при различных значениях вероятностей

Плотность вероятности бета-распределения, обобщенная на случай произвольного отрезка [c;d], с необходимыми выражениями параметров распределения через условное МО и дисперсию, определяются соотношениями


а плотность вероятности гамма-распределения имеет вид


где
a{sk) и b(sk) - параметры бета-распределения, зависящие от условного МО компоненты

c и d - соответственно левая и правая границы, возможных значений рассматриваемой компоненты вектора ФСК;
B(a(sk),b(sk)) - бета-функция;
α(sk) и β(sk) - параметры гамма-распределения, зависящие от условного МО компоненты

Г(α(sk)) - гамма-функция.



При этом сущность процедуры квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния условно-марковской структуры нелинейной стохастической динамической системы заключается в следующем.
1. На основании априорных данных, представленных ММ системы «ВЦ - РЛС - индикатор» (69)-(74), выдвигается (28), (31), (34), (36), (38) гипотеза Г об альтернативных видах






2. Система уравнений замыкается и сложные интегральные рекуррентные уравнения (1)-(27) вырождаются в новые обыкновенные рекуррентные уравнения (41)-(65) относительно условных вероятностей



3. В соответствии с выражениями (41)-(49) находятся условные квазиоптимальные по критерию максимума апостериорной вероятности оценки варианта



4. С учетом выдвинутой гипотезы в соответствии с (50) находятся апостериорные вероятности

5. С учетом выдвинутой гипотезы и найденных вероятностей в соответствии с (57)-(61) оценивается набор моделей динамики ФСК, их измерений в РЛС, смены вариантов воздействия уводящих помех, индикатора таких вариантов и условной плотности вероятности ФСК при фиксированном варианте воздействия уводящих помех, набором


6. С учетом найденных условных оценок






7. При отсутствии дополнительных априорных данных, начальные условия для вероятностей воздействия уводящих помех по фиксированному варианту принимаются равновероятными (66), а для МО функционально-связанных координат и КМ ошибок их оценивания - равномерными (67), (68), как обладающие наибольшей энтропией.
На рис. 4, 6, 8, 10 представлены итоговые аппроксимирующие смеси из бета- и гамма- распределений, взятых с весовыми коэффициентами из табл. 3.
Результаты сравнительного моделирования предлагаемого способа сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех на основе многоканального фильтра совместных оценивания радиальных дальности до цели, планерные и компрессорные составляющие радиальных скорости и ускорения взаимного перемещения носителя РЛС и цели, и распознавания варианта воздействия уводящих помех, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния условно-марковской структуры нелинейной стохастической динамической системы при наблюдении без запаздывания на основе адаптивной двухмоментной параметрической аппроксимации неизвестных плотностей вероятности смесью априорно задаваемых аппроксимирующих функций, и известного способа сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех [2] свидетельствуют с доверительной вероятностью 0,99 о снижении СКО ошибки фильтрации на 9±0,1% и о повышении вероятности правильного распознавания варианта воздействия уводящих помех на 8±0,1%.
Таким образом, применение предлагаемого изобретения позволит повысить достоверность совместного или раздельного воздействия уводящих помех и оценки радиальных функционально-связанных дальности до ВЦ и скорости сближения носителя РЛС с нею путем адаптивной двухмоментной параметрической аппроксимации неизвестных плотностей вероятности смесью априорно задаваемых аппроксимирующих функций и приближением получаемых оценок к их оптимальным значениям за счет учета нелинейностей в динамике ФСК и их измерений, учета статистической зависимости вероятностей смены вариантов воздействия уводящих помех от ФСК, комплексирования информации РЛС и индикатора варианта воздействия уводящих помех, учета априорных данных о смене этих вариантов и адаптации системы наблюдения к ним.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Богданов А.В., Васильев О.В., Докучаев Я.С. Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящих по дальности и скорости помех. Патент на изобретение №2665031, 2018 (аналог).
2. Мужичек С.М., Филонов А.А., Скрынников А.А., Федотов А.Ю., Ткачева О.О., Викулова Ю.М., Корнилов А.А., Макашин С.Л. Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящих по дальности и скорости помех. Патент на изобретение №2713635 от 05.02.20 (прототип).
3. Бухалев, В.А. Оптимальное сглаживание в системах со случайной скачкообразной структурой / В.А. Бухалев. М.: ФИЗМАТ ЛИТ, 2013, страницы 115, 116, 117.
Реферат
Изобретение относится к области цифровой обработки радиолокационных сигналов и может быть использовано в радиолокационной станции (РЛС) для формирования при сопровождении воздушной цели (ВЦ) из класса «самолет с турбореактивным двигателем» достоверной идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия их воздействия и оценки радиальных функционально-связанных координат (ФСК) взаимного перемещения ВЦ и носителя РЛС при различных вариантах воздействия таких помех. Технический результат - повышение достоверности идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех и оценки дальности до ВЦ и скорости сближения носителя РЛС с ней. Способ заключается в идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия их воздействия и оценки радиальных функционально-связанных дальности до ВЦ и скорости сближения носителя РЛС с ней путем адаптивной двухмоментной параметрической аппроксимации (АДПА) неизвестных плотностей вероятности фазовых координат смесью априорно задаваемых аппроксимирующих функций и приближением получаемых оценок к их оптимальным значениям за счет учета нелинейностей в динамике ФСК и их измерений, учета статистической зависимости вероятностей смены вариантов воздействия уводящих помех от ФСК, комплексирования информации РЛС и индикатора варианта воздействия уводящих помех, учета априорных данных о смене этих вариантов и адаптации системы наблюдения к ним. В способе проводят узкополосную доплеровскую фильтрацию сигнала, отраженного от цели, с использованием процедуры быстрого преобразования Фурье, формирование отсчетов доплеровских частот, обусловленных отражениями сигнала от планера и лопаток рабочего колеса первой ступени компрессора низкого давления силовой установки ВЦ, и обработку сформированных отсчетов доплеровских частот и выходных показаний индикатора варианта воздействия уводящих помех в многоканальном фильтре совместных сопровождения ВЦ и первой компрессорной составляющей спектра сигнала и идентификации варианта воздействия уводящих помех. Указанный фильтр функционирует в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния условно-марковской структуры нелинейной стохастической динамической системы при наблюдении без запаздывания. На выходе фильтра формируются оценки условной плотности вероятности ФСК при фиксированном варианте воздействия уводящих помех. 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый"
Комментарии