Способ обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами - RU2791275C1
Код документа: RU2791275C1
Чертежи






Описание
Изобретение относится к области радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС) различных типов (обзорных, многофункциональных и др.), использующих радиоимпульсы длительностью единицы-десятки наносекунд, для решения задачи обнаружения среднеразмерных воздушных объектов при произвольных ракурсах их наблюдения.
Одним из современных и перспективных направлений развития радиолокационной техники является локация с помощью радиоимпульсов санти- и миллиметрового диапазонов длительностью 1-20 нс, имеющих огибающую близкую к прямоугольной. Такие сигналы относятся к классу сверхширокополосных и называются сверхкороткоимпульсными (СКИ) [1-2]. При работе РЛС в режиме сверхкороткоимпульсного зондирования (СКИЗ) наблюдаемые объекты занимают несколько разрешаемых объемов по дальности и не являются точечными отражателями. В этой связи, структура отраженных СКИ сигналов значительно отличается от структуры отраженных традиционных узкополосных сигналов и протяжённых сигналов с внутриимпульсной модуляцией (фиг.1). Известно [3-6], что отраженный СКИ сигнал представляет собой сомкнутую пачку некогерентных радиоимпульсов со случайной амплитудой (фиг.2), каждый отдельный импульс которой называется – парциальным импульсом эхо-сигнала (фиг.1). Длительность СКИ эхо-сигнала зависит от линейных размеров наблюдаемого объекта, а амплитудные флуктуации и скачки фазы – от ракурса наблюдения. Указанные обстоятельства приводят к снижению эффективности обнаружения воздушных объектов в режиме СКИЗ.
Известен способ обнаружения отраженных сверхкоротких радиоимпульсов с априорно неизвестной структурой на основе построения эрад [7 с. 123-130]. Он основан на обработке принятого сигнала в фильтре, согласованном с одиночным радиоимпульсом, квадратичном амплитудном детектировании, аналого-цифровом преобразовании и разбиении поля дальность-азимут на перекрывающиеся секции (эрады), в каждой из которых вычисляется среднее значение амплитуды эхо-сигнала, а далее относительное значение по результатам нескольких обзоров и осуществляется пороговая обработка. Для эффективной работы указанного способа необходимо обрабатывать информацию по результатам двух и более обзоров, что снижает время обнаружения воздушных объектов. Кроме того, способ предполагает накопление не всего полезного сигнала, а его части в пределах длительности эрады, равной длительности разрешаемого элемента РЛС по дальности, что снижает потенциальные характеристики обнаружения.
Известен способ обнаружения эхо-сигналов при СКИ зондировании [3 с. 109]. Способ позволяет эффективно обнаруживать протяженные объекты различных размеров при произвольном ракурсе их наблюдения. Он основан на согласованной фильтрации принятого сигнала в пределах длительности излучаемого импульса; квадратичном амплитудном детектировании; последовательной временной задержке парциальных импульсов эхо-сигнала, их перемножении на весовые коэффициенты, соответствующие расположению и амплитуде парциальных импульсов принимаемого сигнала; суммировании парциальных импульсов в пределах длительности эхо-сигнала; сравнении полученной решающей статистики с порогом. Предлагаемая в способе весовая обработка приводит к необходимости наличия в РЛС априорной информации о взаимном расположении участков локального отражения, их расположения относительно линии визирования и величине их эффективной отражающей поверхности для всех типов воздушных объектов и всех ракурсов их наблюдения, что потребует хранения больших и актуальных массивов данных и практически реализовать не представляется возможным.
Известен способ обнаружения некогерентной пачки флюктуирующих радиоимпульсов, основанный на когерентном накоплении в пределах импульса и некогерентном накоплении от импульса к импульсу в пределах пачки, который может быть использован для обнаружения СКИ эхо-сигналов и принятый в качестве прототипа [8 с. 67-68]. Его суть заключается в следующем:
1. Согласованная фильтрация принятого сигнала в пределах длительности одного импульса (для СКИ сигналов – парциального импульса эхо-сигнала);
2. Квадратичное амплитудное детектирование;
3. Синхронное накопление (реализованное как аналого-цифровое преобразование, последовательная временная задержка M-групп цифровых отсчетов, соответствующих длительности одного импульса (для СКИ сигналов – парциального импульса эхо-сигнала) и цифровое накопление в пределах длительности принимаемого сигнала);
4. Пороговая обработка (сравнение полученной решающей статистики с порогом и принятие решения о наличии или отсутствии полезного сигнала) в соответствии с выражением:
где K – количество накапливаемых импульсов;


В качестве недостатков рассмотренного прототипа можно указать следующее:
1. При СКИЗ энергия эхо-сигнала от объекта обусловлена рассеиванием энергии одного и того же зондирующего сигнала (радиоимпульса) различными составляющими объекта. То есть энергетическая плотность отражённого сигнала – низкая. Кроме того, составляющие эхо-сигнала объекта, относящиеся к разным элементам разрешения, имеют случайную амплитуду (фиг. 2), по причине локального характера отражения волн [9]. Это приводит к тому, что в некоторых элементах разрешения энергия сигнала значительно ниже спектральной плотности мощности шума, и накопление таких составляющих эхо-сигнала может приводить к снижению результирующего отношения сигнал-шум на выходе устройства обработки и уменьшении условной вероятности правильного обнаружения.
2. Длительность эхо-сигнала при СКИЗ является величиной неизвестной и случайной, а это означает, что количество отводов линии задержки (количество суммируемых цифровых отсчетов) заранее выбрать невозможно.
Техническим результатом настоящего изобретения является реализация возможности обнаружения сверхкороткоимпульсных сигналов, отраженных от среднеразмерных протяженных воздушных объектов при произвольном ракурсе их наблюдения.
Технический результат достигается тем, что в способе обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами, который заключается в согласованной фильтрации принятого сигнала в пределах длительности зондирующего сигнала, квадратичном амплитудном детектировании, аналого-цифровом преобразовании, последовательной временной задержке M-групп отсчетов, соответствующих длительности парциального импульса эхо-сигнала на величину кратную длительности зондирующего сигнала, цифровом накоплении отсчетов в пределах длительности эхо-сигнала, сравнении полученной решающей статистики с порогом, согласно изобретения, после временной задержки M-групп отсчетов осуществляется выбор отсчетов с максимальной амплитудой в каждой из M-групп, ранжирование выбранных отсчетов в порядке возрастания их амплитуд, выбор R-отсчетов с наиболее существенными амплитудами, их цифровое накопление с весовыми коэффициентами, рассчитанными путем усреднения нормированных значений амплитуд парциальных импульсов эхо-сигналов различных протяжённых объектов с различных ракурсов их наблюдения и упорядоченных в порядке убывания с последующим сравнением полученной решающей статистики с порогом.
Физическая суть предлагаемого способа заключается в следующем.
Принимаемый СКИ эхо-сигнал не соответствует длительности зондирующего сигнала и представляет собой радиолокационный отклик от центров рассеяния объекта в виде суперпозиции откликов от эффективных точечных рассеивателей [6, 10]. Для неподвижного относительно РЛС объекта каждый отдельный отклик его точечного рассеивателя рассматривается как принятый радиолокационный сигнал, представляющий собой задержанную и взвешенную копию зондирующего сигнала (называемый парциальным импульсом), а принятый сигнал рассматривается как сумма всех парциальных импульсов (фиг.2):
где B – количество парциальных импульсов;
Ab – амплитуда парциального импульса;
s0 – парциальный импульс, соответствующий зондирующему сигналу;
rb – дальность до b-го парциального импульса;
c – скорость света;
b=1…B – номер парциального импульса.
Входная реализация РЛС на фоне собственных шумов ее приемного устройства записывается в виде:

где A – случайный параметр, характеризующий наличие или отсутствие в принимаемой реализации полезного сигнала;
n(t) – собственный шум приемного устройства РЛС.
На первом этапе, согласно изобретению, производится согласованная фильтрация принятой реализации (3) в пределах длительности зондирующего сигнала (парциального импульса эхо-сигнала):

где Tc – длительность зондирующего сигнала;
h(t) – импульсная характеристика, согласованного с парциальным импульсом, фильтра (СФ);
τ – временное рассогласование между принятой реализацией и импульсной характеристикой СФ.
Далее полученные значения корреляционного интеграла (4) подвергаются обработке в квадратичном амплитудном детекторе, формируя таким образом квадрат модуля корреляционного интеграла:

Далее осуществляется аналого-цифровое преобразование (АЦП) модуля корреляционного интеграла с частотой дискретизации fд, выбираемой по критерию Котельникова (Найквиста) [11]. В результате дальнейшая обработка осуществляется с цифровыми отсчетами:

где n – целое число;
T – шаг дискретизации.
После АЦП отсчёты In поступают на цифровую линию задержки (сдвигающий регистр), обеспечивающую запоминание их амплитуды в пределах некоторого временного окна размерностью M-элементов, которым соответствует L цифровых отсчетов:

где M – количество элементов временного окна;
N – количество цифровых отсчетов в элементе временного окна.
Под временным окном понимается анализируемый промежуток времени (или анализируемое количество цифровых отсчетов), которое может быть представлено в виде последовательности элементов разрешения РЛС по дальности – называемых элементами временного окна. Каждому элементу временного окна соответствует группа отсчетов. Общее количество групп отсчетов составляет M.
Далее выбираем размерность (количество элементов) временного окна. В общем случае количество элементов временного окна будет соответствовать М-элементам разрешения РЛС по дальности. Учитывая, что в режиме СКИЗ большинство наблюдаемых объектов являются протяженными, длительность временного окна обнаружителя необходимо выбирать в зависимости от предполагаемого типа обнаруживаемых радиолокационных объектов. На фиг. 3 показана гистограмма плотности распределения длительности эхо-сигналов 9 типов аэродинамических объектов (самолеты F-14, F-14A, F-14D, F-16, F-15, F-15B, YF-22, F-22, СУ-37) при возможных ракурсах их наблюдения, выраженная в количестве элементов временного окна M. Из фиг. 3 видно, что в 90% случаев составляющие объектов располагались на временном интервале, соответствующем M=16 элементам разрешения РЛС по дальности.
Следует так же отметить что увеличение количества элементов временного окна (до 20 и более) приведёт к попаданию в него большего количества отсчётов шума, которые будут принимать участие в формировании решающей статистики. Уменьшение количества элементов временного окна (до 10 и менее) приведёт к энергетическим потерям. В обоих случаях будет наблюдаться снижение эффективности качества обнаружения. На фиг. 4 приведены графики зависимости энергетических потерь в исследуемом временном окне различной размерности M относительно временного окна, размерность которого совпадает с длительностью эхо-сигнала, от отношения сигнал/шум q. Из фиг. 4 видно, что минимальные энергетические потери обеспечиваются, когда размерность исследуемого временного окна составляет 16 парциальных импульсов (фиг.4, кривая 3).
Таким образом, размерность временного окна выбрана равной 16 элементам разрешения РЛС по дальности, что соответствует 16-ти длительностям зондирующего сигнала Tc·16. Соответствующая этой длительности размерность цифровой линии задержки будет равна L=N·16. Для обнаружения объектов различного размера можно рекомендовать в режиме СКИЗ применять многоканальную по типам объектов (двух-, трёх-, четырёхканальную) последетекторную обработку.
Далее вычисляются отсчеты с максимальной амплитудой в пределах каждой из M-элементов временного окна. С этой целью совокупность цифровых отсчетов (6) разбивается на M-групп, размерностью N-отсчетов. В каждой из M-групп анализируемой совокупности отсчетов, определяется отсчет с максимальной амплитудой Imaxm. В результате формируется новая последовательность, состоящая из M-отсчетов:

где Imax1 – отсчет с максимальной амплитудой в 1-м элементе временного окна;
ImaxM – отсчет с максимальной амплитудой в M-м элементе временного окна;
m=1…M – номер отсчета с максимальной амплитудой.
Далее отсчеты


В результате ранжирования формируется последовательность, в которой первый отсчет имеет максимальную амплитуду, а все последующие все меньшую.
Далее осуществляется выбор R-отсчетов с наиболее существенными амплитудами из общего количества M-отсчетов. Указанная операция позволит обрабатывать цифровые отсчеты энергетически более значимых парциальных импульсов эхо-сигнала и исключить из обработки отсчеты, чей уровень меньше уровня собственного шума приемного устройства РЛС. Расчет R осуществлялся исходя из условия накопления 90 % энергии сигнала [11]:

где k = 1…R – номер отсчета с наибольшей амплитудой;


Для определения R-отсчетов, согласно выражению (10), оценены зависимости энергии сигнала и спектральной плотности мощности шума от количества накапливаемых парциальных импульсов B (фиг. 5) для реализаций эхо-сигналов аэродинамических объектов средних размеров типа F-14, F-14A, F-14D, F-16, F-15, F-15B, YF-22, F-22, СУ-37. Как видно из фиг. 5, при обработке 6 парциальных импульсов (что соответствует 6 элементам разрешения РЛС по дальности) происходит накопление более 90 % энергии эхо-сигнала. Дальнейшее накопление (более 6 парциальных импульсов) даёт незначительное приращение энергии сигнала, в то время как спектральная плотность мощности шума увеличивается, что влечет к уменьшению результирующего отношения сигнал-шум q. Таким образом, величину R выбираем равной 6.
Далее осуществляется весовая обработка. Для расчета весовых коэффициентов βk оценено усредненное распределение нормированных значений амплитуд парциальных импульсов эхо-сигналов протяжённых объектов, полученных с разных ракурсов и упорядоченных в порядке убывания (фиг.6). Анализ полученной кривой, показывает, что существенными (имеющими относительно высокую амплитуду) являются 6 участков локального отражения. Полученные усреднённые нормированные значения амплитуды предлагается в дальнейшем использовать в качестве весовых коэффициентов βk.
Далее осуществляется цифровое накопление (суммирование) R-отсчетов с наиболее существенными амплитудами Imaxk с учетом, полученных весовых коэффициентов βk:
Далее производится пороговая обработка и принимается решение о наличии или отсутствии полезного сигнала, осуществляемая в соответствии со следующим алгоритмом:

Изобретение иллюстрируется следующими чертежами.
На фиг.1 показан принцип формирования эхо-сигнала при зондировании протяженного воздушного объекта сверхкоротким радиоимпульсом;
На фиг.2 показана модель сверхкороткоимпульсного сигнала X(t), отражённого от объекта типа СУ-37;
На фиг.3 показана гистограмма плотности распределения W(M)длительности эхо-сигналов по числу парциальных импульсов M для аэродинамических объектов средних размеров при различных ракурсах их наблюдения;
На фиг.4 показана зависимость энергетических потерь П, выраженных в дБ, от отношения сигнал/шум q для временных окон различной размерности M относительно временного окна, равного протяжённости эхо-сигнала;
На фиг.5 сплошной линией показана зависимость нормированных значений энергии эхо-сигнала Э от количества накапливаемых парциальных импульсов B, пунктирной – зависимость нормированных значений спектральной плотности мощности шума N0 от количества накапливаемых импульсов B;
На фиг.6 показаны усредненные нормированные значения амплитуды Am(B) парциальных импульсов эхо-сигналов объектов средних размеров, упорядоченные по убыванию;
На фиг.7 показана блок-схема устройства обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами, реализующая вышеизложенный способ. На фиг.7 приняты следующие обозначения:
7.1. Блок согласованной с зондирующим сигналом фильтрации;
7.2. Блок квадратичного амплитудного детектирования;
7.3. Блок аналого-цифрового преобразования;
7.4. Блок цифровой линии задержки (многоканального регистра);
7.5. Блок регистров для хранения L-отсчетов;
7.6. Блок вычисления максимальных отсчетов в каждом из M-элементов временного окна;
7.7. Блок ранжирования максимальных отсчетов;
7.8. Блок расчета весовых коэффициентов;
7.9. Блок умножения ранжированных отсчетов на весовые коэффициенты;
7.10. Блок суммирования;
7.11. Блок пороговой обработки.
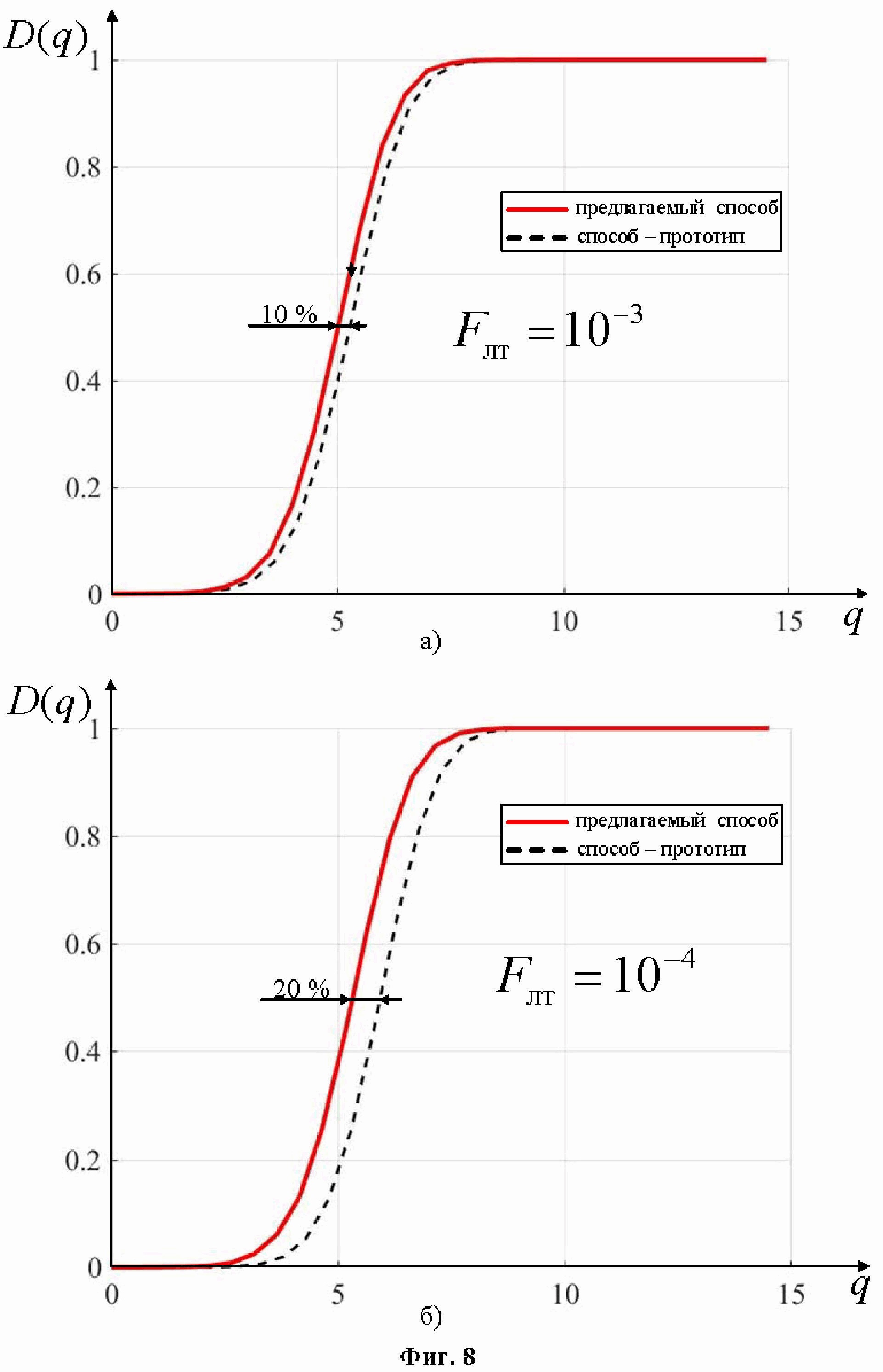
На фиг.8 показаны кривые обнаружения для предлагаемого способа и выбранного прототипа при условиях: а)


Осуществление способа возможно с помощью блок-схемы представленной на фиг. 7 и заключается в последовательном выполнении следующих операций:
1. Согласованная с зондирующим сигналом фильтрация, осуществляемая блоком 7.1 в соответствии с выражением (4);
2. Квадратичное амплитудное детектирование, осуществляемое
блоком 7.2 в соответствии с выражением (5);
3. Аналого-цифровое преобразование, осуществляемое блоком 7.3 в соответствии с выражением (6);
4. Обработка цифровых отсчетов в цифровой линии задержки размерностью (7), осуществляемая блоком 7.4;
5. Запись цифровых отсчетов, соответствующих элементам временного окна в регистры, реализуемые блоком 7.5;
6. Выбор максимальных отсчетов в каждом элементе временного окна, осуществляемый блоком 7.6 и формирование вектора (8);
7. Ранжирование полученных максимальных отсчетов в порядке возрастания их амплитуды, осуществляемое блоком 7.7 в соответствии с выражением (9);
8. Перемножение в блоке 7.9 ранжированных отсчетов с весовыми коэффициентами, формируемыми блоком 7.8;
9. Суммирование R-отсчетов в рециркуляторе, реализованном блоком 7.10 в соответствии с выражением (11);
10. Сравнение полученной решающей статистики с порогом и принятие решения о наличии (в случае превышения порога) и отсутствии (в случае не превышения порога) эхо-сигнала, реализуемые блоком 7.11 в соответствии с выражением (12).
Заявленный технический результат подтвержден результатами, полученными методом имитационного моделирования в пакете прикладных программ MATLAB.
Исходные данные для моделирования:
1. Вид зондирующего сигнала: одиночный прямоугольный импульс;
2. Длительность зондирующего сигнала: Tс=10 нс;
3. Совокупность эхо-сигналов от аэродинамических объектов средних размеров типа: F-14, F-14A, F-14D, F-16, F-15, F-15B, YF-22, F-22, СУ-37;
4. Вид шума: белый гауссовский шум с единичной дисперсией и нулевым математическим ожиданием;
5. Отношение сигнал-шум по напряжению: q=0…15 в разах;
Условная вероятность превышения порога импульсом пачки (эхо-сигнала) рассчитывалась по формуле:

где Ф – функция Лапласа;
q0 – отношение сигнал-шум для одного импульса.
Далее исследовались характеристики обнаружения на фоне белого шума для алгоритмов, реализующих предлагаемый способ и способ-прототип. Результаты моделирования (фиг.8) показали, что при

Таким образом, разработанный способ обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами позволяет обеспечить высокую вероятность правильного обнаружения по сравнению с прототипом, чем и достигается заявленный технический результат.
Список литературы
1. Скосырев В.Н. Применение сверхкороткоимпульсных сигналов в РЛС малой дальности / В.Н. Скосырев, А.Е. Ананенков, 2015. – М.: Эдитус. – 138 с.
2. Вопросы перспективной радиолокации: Монография / Под ред. А.В. Соколова. М.: Радиотехника, 2003. – 512 с.
3. Лаврентьев А.М., Пискунов А.В., Сисигин И.В., Скосырев В.Н., Туров В.Е. Проблемы синтеза эхо-сигналов в РЛС со сверхкоротким зондирующим радиоимпульсом и моделирования элементов сложной радиолокационной сцены: Монография. Ярославль: Изд-во ЯГПУ им. К.Д. Ушинского, 2007. 191 с.
4. Скосырев В.Н., Слукин Г.П., Ильин Е.М. Тенденции и пути внедрения технологии сверхкороткоимпульсной радиолокации // Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. М., 2009. Спец. выпуск «Радиолокация, спутниковая навигация и связь, радиоастрономия». С. 40–47.
5. Вовшин Б.М. Сверхширокополосная радиолокация воздушных объектов с безынерционным обзором пространства // [электронный ресурс]: дис. … д-ра техн. наук: 05.12.14. – М. РГБ, 2007.
6. Корягин М.Г., Лаврентьев А.М., Маринцев Ю.Н. Вопросы оценки дальности до цели в сверхкороткоимпульсной радиолокации: Монография / Под общ. ред. Ю.Н. Маринцева; Ярославский филиал Военно-космической академии имени А.Ф. Можайского. – Ярославль, 2013. – 116 с.
7. Скосырев В.Н Квазиоптимальный многоканальный эрадный обнаружитель сверхкоротких радиоимпульсов / В.Н. Скосырев, В.В. Балагура, М.Ю. Кудряшов, А.А. Худанов / Вестник МГТУ им. Н.Э.Баумана. Сер. «Приборостроение». – М.: МГТУ им. Н.Э.Баумана, 2009. – С. 123-130.
8. Теоретические основы радиолокации и радионавигации: Учеб. пособие для вузов / Ю. Г. Сосулин. М.: Радио и связь, 1992. – 304 с.
9. Скосырев В.Н Особенности и свойства сверхкороткоимпульсной локации // Сверхширокополосные системы в радиолокации и связи: Конспект лекций. / В.И. Кошелев, А.С. Дмитриев, В. Н. Скосырев, А.Ф.Кардо-Сысоев, Н.А. Арманд, Д.С. Лукин, Н.П. Чубинский – Муром: ИПЦ МИ ВлГУ. 2003. –110с.
10. Штагер Е.А., Чаевский Е.В. Рассеяние волн на телах сложной формы. М.: Сов. радио, 1974. 240 с.
11. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. под общей ред. В.С. Вербы. В 2 книгах. Книга 1. – М.: Техносфера, 2014. – 672 с.
Реферат
Изобретение относится к области радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС) различных типов (обзорных, многофункциональных и др.), использующих радиоимпульсы длительностью единицы-десятки наносекунд, для решения задачи обнаружения среднеразмерных воздушных объектов при произвольных ракурсах их наблюдения. Техническим результатом является реализация возможности обнаружения сверхкороткоимпульсных сигналов, отраженных от среднеразмерных протяженных воздушных объектов при произвольном ракурсе их наблюдения. В заявленном способе осуществляют согласованную фильтрацию принятого сигнала в пределах длительности зондирующего сигнала, квадратичное амплитудное детектирование, аналого-цифровое преобразование, последовательную временную задержку M-групп отсчетов, соответствующих длительности парциального импульса эхо-сигнала, на величину, кратную длительности зондирующего сигнала, цифровое накопление отсчетов в пределах длительности эхо-сигнала и сравнение полученной решающей статистики с порогом. После временной задержки M-групп отсчетов осуществляют выбор отсчетов с максимальной амплитудой в каждой из M-групп, выбор R-отсчетов с наиболее существенными амплитудам и их цифровое накопление с весовыми коэффициентами, рассчитанными путем усреднения нормированных значений амплитуд парциальных импульсов эхо-сигналов различных протяжённых объектов с различных ракурсов их наблюдения и упорядоченных в порядке убывания, с последующим сравнением полученной решающей статистики с порогом. 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ повышения разрешающей способности радиолокационного сверхширокополосного зондирования
Способ определения дальности до отражающей поверхности
Комментарии