Способ сверхразрешения сигналов по времени в активной локации - RU2658075C1
Код документа: RU2658075C1
Чертежи
Описание
Изобретение относится к области активной локации, а именно к способам обработки эхосигналов в информационно-измерительных системах, системах РЛС и гидролокаторах, работающих в режимах активного распознавания слабоконтрастных целей с использованием инструментов сверхразрешения на фоне импульсных, широкополосных и распределенных в пространстве помех в радиолокации, гидролокации или других аналогичных системах.
В настоящее время для локации отражающих объектов используются как простые (с произведением длительности сигнала на эффективную ширину спектра, близким 1, обычно протяженные во времени узкополосные посылки), так и сложные (много больше 1) сигналы. Достоинствами простых сигналов являются простота излучения, удобство спектрального разделения подвижных и неподвижных объектов, хорошая отражательная способность на объектах сложной формы, но при этом эффективное разрешение двух отраженных сигналов по времени (дистанции, если учесть скорость распространения сигнала) оказывается возможным только при интервале по времени прихода отраженных сигналов не меньше чем половина длительности сигнала посылки. Сложные сигналы имеют хорошую разрешающую способность по времени, по частоте, но при отражении от объектов сложной формы могут терять когерентность и лишаться своих достоинств, а также прием сложных сигналов даже от подвижных объектов локации всегда производится на фоне реверберации, что снижает отношение сигнал-помеха. И для простых и для сложных сигналов разрешающая способность по времени определяется эффективной шириной спектра, но для практического применения такой разрешающей способности может быть недостаточно, поэтому требуется повысить разрешающую способность локатора без изменения эффективной ширины спектра и длительности сигнала посылки.
Из уровня техники известна «МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ОБНАРУЖЕНИЯ», патент на полезную модель РФ №96664, в которой реализованы операции приема эхосигналов вибраторами активной фазированной антенной решетки, прохождения принятых эхосигналов через антенные переключатели и малошумящие усилители приемо-передающего модуля, оцифровки, а также цифровой обработки сигнальными процессорами, которые формируют диаграммы направленности и выдают необходимую информацию потребителям.
Указанный аналог имеет невысокую разрешающую способность, обусловленную невозможностью применения при цифровой обработке сигналов инструментов сверхразрешения, а также невысокую помехоустойчивость, которая обусловлена отсутствием согласованного фильтра.
Наиболее близким по технической сущности является «ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР», патент RU 2133047, включающий операцию приема эхосигналов антенной и обработку сигнала и его гармоник, представляет собой генератор сигнала посылки, усилитель мощности, посылку сигнала антенной в сторону объекта локации, прием отраженного от объекта локации сигнала на приемную антенну с последующим его проведением через блок предварительной обработки сигнала, АЦП, согласованный с сигналом посылки фильтр, максимизирующий отношение сигнал-помеха, обнаружитель и далее блок управления и обработки информации.
Недостатком прототипа является необходимость использования сверхширокополосного приемника, что существенно уменьшает чувствительность, и отсутствие согласованной с зондирующим сигналом фильтрации эхосигналов ограничивают разрешающую способность определения местоположения объекта.
Таким образом, в известных существующих локаторах использование узкополосных зондирующих сигналов несмотря на многочисленные достоинства ограничено низкой разрешающей способностью по времени (дистанции) [1, 2]. Такими узкополосными сигналами могут быть как простые (гармонические) зондирующие сигналы, так и относительно узкополосные сложные (модулированные), ширина полосы которых много меньше несущей частоты сигнала.
Техническим результатом предлагаемого изобретения является повышение разрешающей способности определения местоположения объектов в активной локации как при использовании сложных, так и простых зондирующих сигналов.
Технический результат достигается за счет того, что, в представляющим собой типовом тракте, локатор дополнен блоком модификации опорного сигнала в корреляционном приемнике (технической реализации согласованного с сигналом посылки фильтра). В качестве опорного сигнала используют не когерентную копию сигнала посылки, а модифицированную в спектральной области копию, то есть расширение спектра сигнала за счет частичного подавления центральной несущей частоты и управляемого усиления боковых лепестков спектра.
Из [2] следует, что оптимальный способ обнаружения детерминированного сигнала на фоне аддитивного белого шума (в ограниченной полосе приема можно помеху считать равномерной или белой) предписывает сравнение с порогом корреляционного интервала
где x(t) - входной сигнал, y(t) - выходной сигнал, s(t) - АЧХ фильтра, совпадающая по значениям с сигналом посылки.
Технически такой оптимальный согласованный фильтр реализован как корреляционный приемник, в котором принимаемый сигнал поступает на линию задержки, где перемножается с опорным сигналом и суммируется. Обработка сигнала может производиться как во временной, так и в частотной области. Для перехода в частотную область перед блоком согласованной фильтрации устанавливают блок преобразования Фурье.
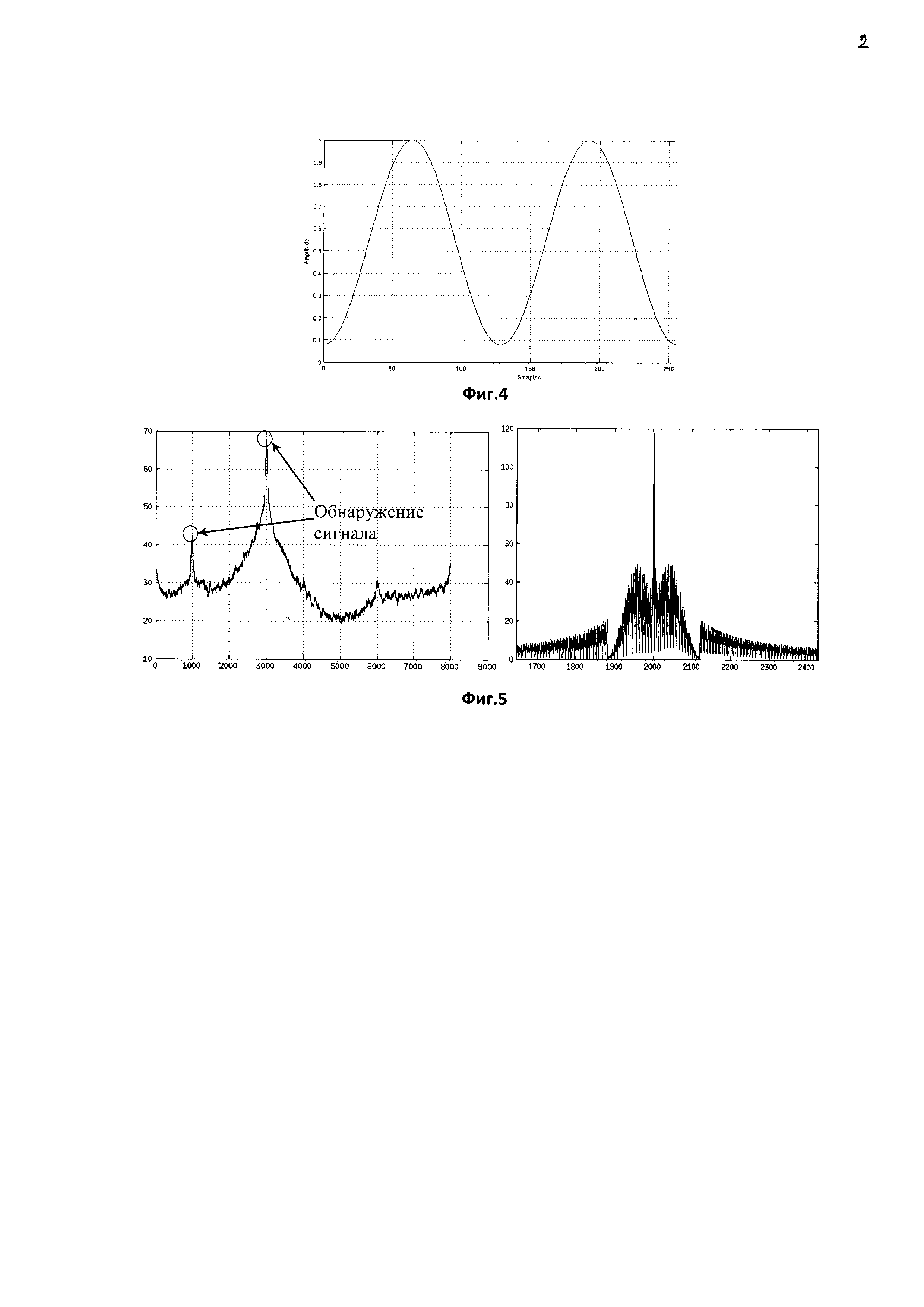
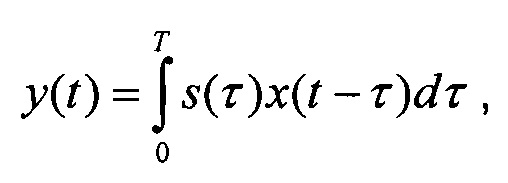
На выходе согласованного фильтра при приеме отраженного сигнала, когда в качестве сигнала посылки используется простой сигнал в виде протяженного во времени гармонического колебания, получают сигнал, показанный на фиг. 3. Причем на фиг. 2 показана сумма двух простых сигналов, разнесенных по времени, на фоне помех. На фиг. 3 видно, что на выходе согласованного фильтра (отклик фильтра) принятые сигналы неразличимы по времени - они дают один общий отклик и, чтобы различить их разрешающей способности гидролокатора по времени, такого сигнала недостаточно.
Таким образом, недостатком простого сигнала является ширина главного максимума, пропорциональная длительности сигнала посылки. Чем длиннее сигнал, тем шире функция неопределенности на приеме. Уменьшение длительности сигнала приводит к уменьшению энергии сигнала посылки и невозможности его обнаружения на фоне помех, поэтому короткие сигналы посылки на практике не используются. Задача заключается в уменьшении ширины главного максимума функции неопределенности (разрешающей способности по времени) без уменьшения длительности сигнала посылки. Аналогичные рассуждения справедливы и для сложных сигналов посылки, для которых необходимо увеличить разрешающую способность.
Известно [3], что разрешающая способность гидролокатора по времени определяется эффективной шириной его спектра:
где т - разрешающая способность гидролокатора, S(ω) - спектр сигнала, ω0 - центральная частота сигнала.
Тогда разрешающая способность по времени
и разрешающая способность по дистанции
Δd=с⋅τ,
где с - скорость распространения сигнала.
Отсюда следует, что разрешающая способность по дистанции обратно пропорциональна эффективной ширине спектра сигнала и рассматриваемые простые и узкополосные сложные сигналы, имеющие узкие спектры, обладают низкой разрешающей способностью по дистанции.
Для повышения разрешающей способности таких сигналов необходимо искусственно расширить их эффективный спектр. Для этого требуется при сохранении фазовой структуры спектра изменить его амплитуду на краях диапазона и подавить в центре. Только в таком случае удается при сохранении энергии сигнала увеличить его эффективную ширину спектра. Хорошо изученным и удобным инструментом для параметрического управления параметрами результирующего спектра являются оконные функции, которые обычно применяют во временной области, для воздействия на частотный спектр. Предложено, используя свойства обратимости преобразования Фурье (с точностью до постоянного множителя), использовать их в спектральной области для воздействия на параметры сигнала во временной области.
Спектр зондирующего сигнала (как простого, так и модулированных сложных) представляет собой спектр несущей частоты и две боковые полосы модуляции. Для простого сигнала модуляцией является только ограничение сигнала по времени, имеющее спектр прямоугольного импульса [4], то есть
sin(2πt/T)/(2πt/T)
где t - время, T - длительность посылки.
Для сложных сигналов каждая боковая полоса представляет спектр модулирующего сигнала (вещественный или мнимый).
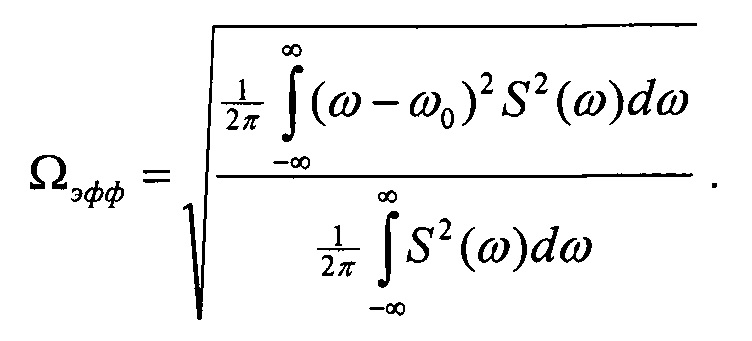
При необходимости частично подавить центральную частоту (спектр несущей) и подчеркнуть модуляцию сигнала предложено использовать две зеркальные оконные функции, соприкасающиеся на центральной частоте принимаемого сигнала, как показано на фиг. 4. При этом край оконной функции, оказавшийся на центральной частоте, подавляет ее, а боковые полосы модуляции усиливает, что позволяет расширить эффективный спектр сигнала, сохранив при этом его спектральную фазовую структуру (информацию о задержках сигнала во времени). Управление формой и шириной оконной функции делает возможным изменение эффективной ширины сигнала и, как следствие, разрешающей способности по времени.
В корреляционном приемнике (технической реализации согласованного фильтра) происходит свертка двух сигналов - принятого и опорного, в спектральной области это равносильно перемножению спектральных компонент принятого и опорного сигналов. Поэтому все спектральные преобразования можно производить как над принятым сигналом, что неудобно, так и над опорным. Возможность однократно провести спектральные преобразования над опорным сигналом, а потом использовать его для оптимальной фильтрации принятых сигналов перед обнаружителем, позволяет существенно уменьшить количество вычислений.
Для спектральных преобразований опорного сигнала необходимо задать тип оконной функции, ее длину (в количестве спектральных отсчетов) и в некоторых оконных функциях дополнительные значения. Длина оконной функции определяет эффективный спектр опорного сигнала, тип оконной функции позволяет управлять формой результирующего сигнала на выходе корреляционного приемника, а дополнительные значения, управляющие формой оконной функции, позволяют изменять форму и уровень «боковых» лепестков сигнала на выходе корреляционного приемника. Но при расширении эффективного спектра опорного сигнала в корреляционном приемнике увеличивается количество помех, влияющих на результирующий сигнал, что приводит к необходимости подбора типа и параметров оконной функции под текущую сигнально-помеховую ситуацию. Сам корреляционный приемник может быть реализован как во временной, так и в частотной области. Для построения корреляционного приемника во временной области необходимо произвести обратное преобразование Фурье над модифицированным спектром опорного сигнала и использовать полученные значения в качестве импульсной характеристики корреляционного фильтра.
Результат использования модификации спектра опорного сигнала показан на Фиг. 5, где хорошо видно, что при том же принятом сигнале, что и на Фиг. 3, разрешающая способность повысилась во много раз, что позволило разделить отраженные сигналы по времени (и, как следствие, по дистанции).
В случаях когда эффект Доплера изменяет частоту отраженного сигнала относительно посланного на величину, превышающую ширину функции неопределенности зондирующего сигнала по частоте, используется многоканальный по частоте приемник. Количество каналов определяется из диапазона скоростей объектов локации и ширины функции неопределенности сигнала по частоте. Тогда в каждом канале необходимо построить свой модифицированный опорный сигнал, настроенный на частоту отраженного сигнала, соответствующую номеру канала, и использовать в каждом канале свой корреляционный приемник и обнаружитель/измеритель.
Новизной изобретения является новая совокупность известных из уровня техники операций, которая позволяет совместить преимущества использования оптимальной фильтрации эхосигналов (корреляционный приемник) и возможности сверхразрешения по времени (дистанции до объектов локации) как на сложном, так и на простом сигнале.
Реализация способа сверхразрешения сигналов по времени в активной локации по времени представлена на следующих чертежах:
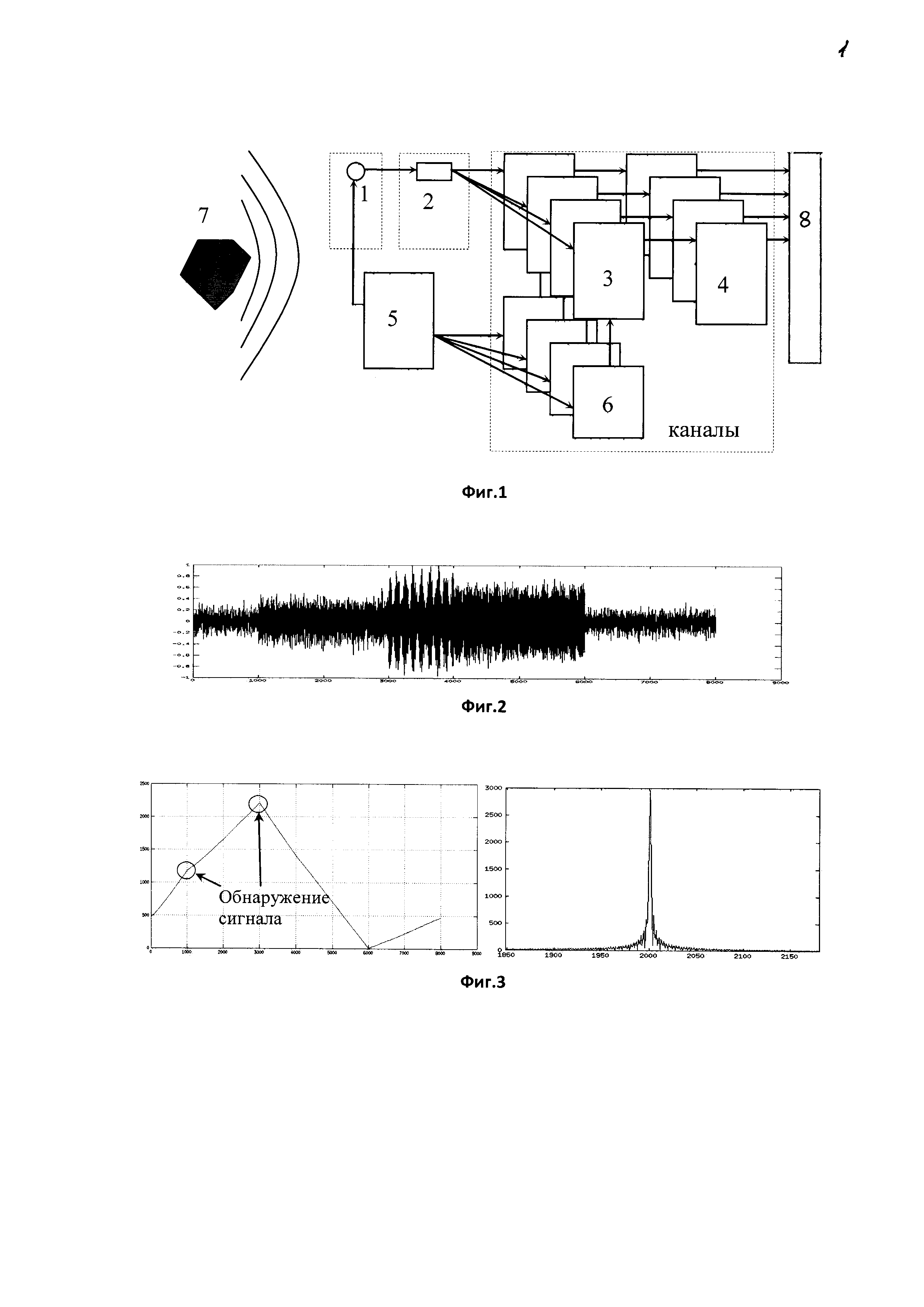
фиг. 1 - блок-схема локатора, реализующего заявляемый способ локации;
фиг. 2 - пример осциллограммы суммы двух простых сигналов на фоне помех;
фиг. 3 - амплитуда сигнала на выходе корреляционного приемника без коррекции спектра опорного сигнала и спектр опорного сигнала;
фиг. 4 - пример использования оконной функции для модификации спектра опорного сигнала;
фиг. 5 - амплитуда сигнала на выходе корреляционного приемника с коррекцией спектра опорного сигнала и спектр модифицированного опорного сигнала.
Устройство, реализующее предлагаемый способ, представлено на фиг. 1, включает 1 - антенну, 2 - блоки предварительной обработки эхосигналов и АЦП, 3 - корреляционный приемник, 4 - обнаружитель, 5 - генератор сигнала посылки, 6 - модификатор спектра сигнала посылки, 7 - объект локации, 8 - блок обработки.
Сигнал посылки формируется генератором 5, посылается антенной 1 в сторону объекта локации. Отраженный от объекта локации сигнал попадает на антенну, проходит через блок предварительной обработки сигнала и АЦП 2, оказывается на корреляционном приемнике 3, где перемножается с опорным сигналом, который является модифицированным в спектральной области (блок 6) сигналом посылки. Результат перемножения попадает на обнаружитель 6 и далее в блок управления и обработки информации.
Для модификации спектра используются методы цифровой обработки сигнала - оконные функции, усиливающие боковые лепестки спектра опорного сигнала и частично подавляющие центральную частоту опорного сигнала. Пример модифицирующей функции - оконная функция Кайзера, у которой с помощью параметра можно задавать ширину окна и степень подавления на краях.
В предлагаемом способе модификация спектра опорного сигнала в корреляционном приемнике увеличивает разрешающую способность локатора по дистанции (фиг. 5), что позволяет разделять близко расположенные сигналы и обнаруживать их на фоне близко расположенных по пространству помех, повысить разрешающую способность определения местоположения объектов, а также повысить помехоустойчивость и чувствительность обнаружителя.
Внедрение вышеописанного способа в информационно-измерительные системы местоопределения объектов может значительно снизить их стоимость благодаря обеспечению возможности использования более простой и дешевой конфигурации антенной решетки при заданных ТТХ обнаружения объектов за счет повышения разрешающей способности, помехоустойчивости и чувствительности.
Источники информации
1. Roy R., Kailath Т. ESPRIT - estimation of signal parameters via rotational invariance techniques. "IEEE Trans. Acoust., Speech and Signal Process." 1989, Vol. 37, No. 7.
2. Малышкин Г.С. Оптимальные и адаптивные методы обработки гидроакустических сигналов. Том 1. Оптимальные методы - СПб.: Электроприбор, 2009. - 400 с.
3. Ширман Я.Д. Разрешение и сжатие сигналов. М.,«Сов. Радио», 1974, 360 с.
4. Stoica Р, Moses R.L. Introduction to Spectral Analysis. New Jersey, Prentice-Hall, Inc. 1997, 319 p.
Реферат
Изобретение относится к области активной локации, а именно к способам обработки эхосигналов в информационно-измерительных системах, системах РЛС и гидролокаторах, работающих в режимах активного распознавания слабоконтрастных целей с использованием инструментов сверхразрешения на фоне импульсных, широкополосных и распределенных в пространстве помех в радиолокации, гидролокации или других аналогичных системах. Техническим результатом изобретения является повышение разрешающей способности определения местоположения объектов по дистанции в активной локации как при использовании сложных, так и простых зондирующих сигналов и достигается за счет того, что в типовом тракте локатор дополнен блоком модификации опорного сигнала в корреляционном приемнике (технической реализации согласованного с сигналом посылки фильтра). В качестве опорного сигнала использована модифицированная в спектральной области копия посылки, то есть расширение спектра сигнала за счет частичного подавления центральной несущей частоты и управляемого усиления боковых лепестков спектра, что повышает разрешающую способность локатора инструментами сверхразрешения при цифровой обработке сигналов в активной локации, а также повышает эффективность и снижает стоимость информационно-измерительной системы местоопределения объекта. 1 з.п. ф-лы, 5 ил.
Комментарии