Способ определения азимутального положения наземных движущихся объектов бортовой радиолокационной станцией с антенной решеткой - RU2776865C1
Код документа: RU2776865C1
Чертежи
Описание
Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) для определения азимутального положения наземных движущихся объектов.
Известен «Способ обнаружения наземных движущихся целей» [RU 2042151, опубликовано 20.08.1995, МПК G01S 13/52]. Способ включает в себя режекцию низкочастотной помехи в когерентно принятом отраженном сигнале, выделение огибающей, накопление сигналов и сравнение их с адаптивным порогом. После выделения огибающей сигнала определяют ее корреляционную функцию, выделяют огибающую корреляционной функции, режектируют помеховые составляющие огибающей корреляционной функции, накапливают сигналы прорежектированной огибающей корреляционной функции, а в качестве порога используют промасштабированный в соответствии с заданным уровнем ложной тревоги нулевой отсчет огибающей корреляционной функции.
Известен «Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией» [RU 2691771, опубликовано 18.06.2019, МПК G01S 15/00]. В процессе сканирования в заданном секторе обзора лучом диаграммы направленности антенны (ДНА) на передачу когерентно излучают импульсный сигнал, принимают отраженный от земной поверхности импульсный сигнал двумя независимыми лучами ДНА на прием, разнесенными по азимуту, причем луч ДНА на передачу перекрывает по ширине лучи ДНА на прием. Принятые по каждому лучу ДНА сигналы стробируют по дальности, осуществляют их аналого-цифровое преобразование, когерентно накапливают принятые сигналы во всем секторе обзора, определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу ДНА, отраженными от одного и того же участка земной поверхности. После завершения накопления сигналов из них формируют два массива отсчетов сигналов, определяют крутизну частотной модуляции накопленных сигналов, а компенсацию временной задержки между отсчетами массивов сигналов осуществляют одновременно с устранением частотной модуляции сигналов, путем их гетеродинирования. Затем преобразуют скомпенсированные массивы сигналов в частотную область, определяют разность фаз между преобразованными в частотную область массивами сигналов для всех частот и стробов дальности, рассчитывают пороговое значение разности фаз по всем отсчетам массивов сигналов, сравнивают значения разности фаз для всех частот и стробов дальности с пороговым значением, при превышении разностью фаз порогового значения фиксируют наличие движущейся цели в отсчете сигнала на соответствующей частоте и в соответствующем стробе дальности.
Наиболее близким по технической сущности является способ селекции движущихся целей в радиолокаторе с синтезированной апертурой антенны (РСА) с моноимпульсной антенной, описанный в монографии [«Радиовидение. Радиолокационные системы дистанционного зондирования Земли» Учебное пособие для ВУЗов под ред. Г.С. Кондратенкова, М.: Радиотехника, 2005 г. стр. 312-318, рис. 8.10]. В указанном способе БРЛС осуществляет обзор одного и того же участка земной поверхности (телескопический обзор) с излучением импульсного когерентного радиолокационного сигнала двухканальной моноимпульсной антенной и приемом отраженного сигнала. В приемнике БРЛС когерентно накапливают сигналы, принятые по суммарному и разностному каналам моноимпульсной антенны. В блоке цифровой обработки синтезируют апертуру по каждому из накопленных сигналов в виде отсчетов массивов комплексных амплитуд на выходе доплеровских фильтров. Затем из массива комплексных амплитуд суммарного канала поэлементно вычитают массив комплексных амплитуд разностного канала, отсчеты которого домножены на коэффициенты компенсации. Затем осуществляют детектирование (взятие модуля комплексной амплитуды) полученного массива комплексных амплитуд, а затем поэлементное сравнение с пороговым значением. При превышении порога фиксируют наличие движущейся цели.
Недостатками указанных решений является низкая точность определения азимутального положения наземных движущихся объектов.
Технической проблемой решаемой предлагаемым изобретением является повышение точности определения азимутального положения обнаруженных наземных движущихся объектов.
Техническим результатом предлагаемого изобретения является подавление мешающих отражений сигнала от земной поверхности.
Сущность предлагаемого изобретения заключается в том, что осуществляют телескопический обзор участка земной поверхности, с излучением импульсного когерентного радиолокационного сигнала и приемом отраженных сигналов s1(t), s2(t) антенной решеткой бортовой радиолокационной станции, когерентно накапливают принятые сигналы s1(t), s2(t), синтезируют апертуру антенны по каждому из сигналов s1(t) и s2 (t) в виде двух массивов комплексных амплитуд сигналов
Новым в заявляемом способе является то, что прием сигналов s1(t), s2(t) осуществляют соответственно первой и второй подрешеткой антенной решетки со смещенными по азимуту фазовыми центрами бортовой радиолокационной станции, а после синтеза апертур антенны


где λ - длина волны излучаемого сигнала, d - расстояние между фазовыми центрами подрешеток, Vпут - путевая скорость носителя бортовой радиолокационной станции, α0 - азимут центра зоны обзора,

где vрад - радиальная скорость движущегося объекта, Vпут - путевая скорость носителя бортовой радиолокационной станции, α0 - азимут центра зоны обзора. Определяют азимутальное положение движущегося объекта αИП коррекцией азимутального значения αiд на величину δα. Прием отраженных сигналов осуществляют подрешетками антенной решетки со смещенными фазовыми центрами на половину диаметра антенной решетки. Отклонение фазы сигнала Δϕ[i,k] первой синтезированной апертуры

где λ - длина волны излучаемого сигнала, d - расстояние между фазовыми центрами подрешеток, βk - угол места ДНА подрешетки для k-го отсчета по дальности, αi - азимутальное направление ДНА первой подрешетки для i-го отсчета по азимуту. Отклонение фазы Δϕ[i,k] сигнала первой синтезированной апертуры


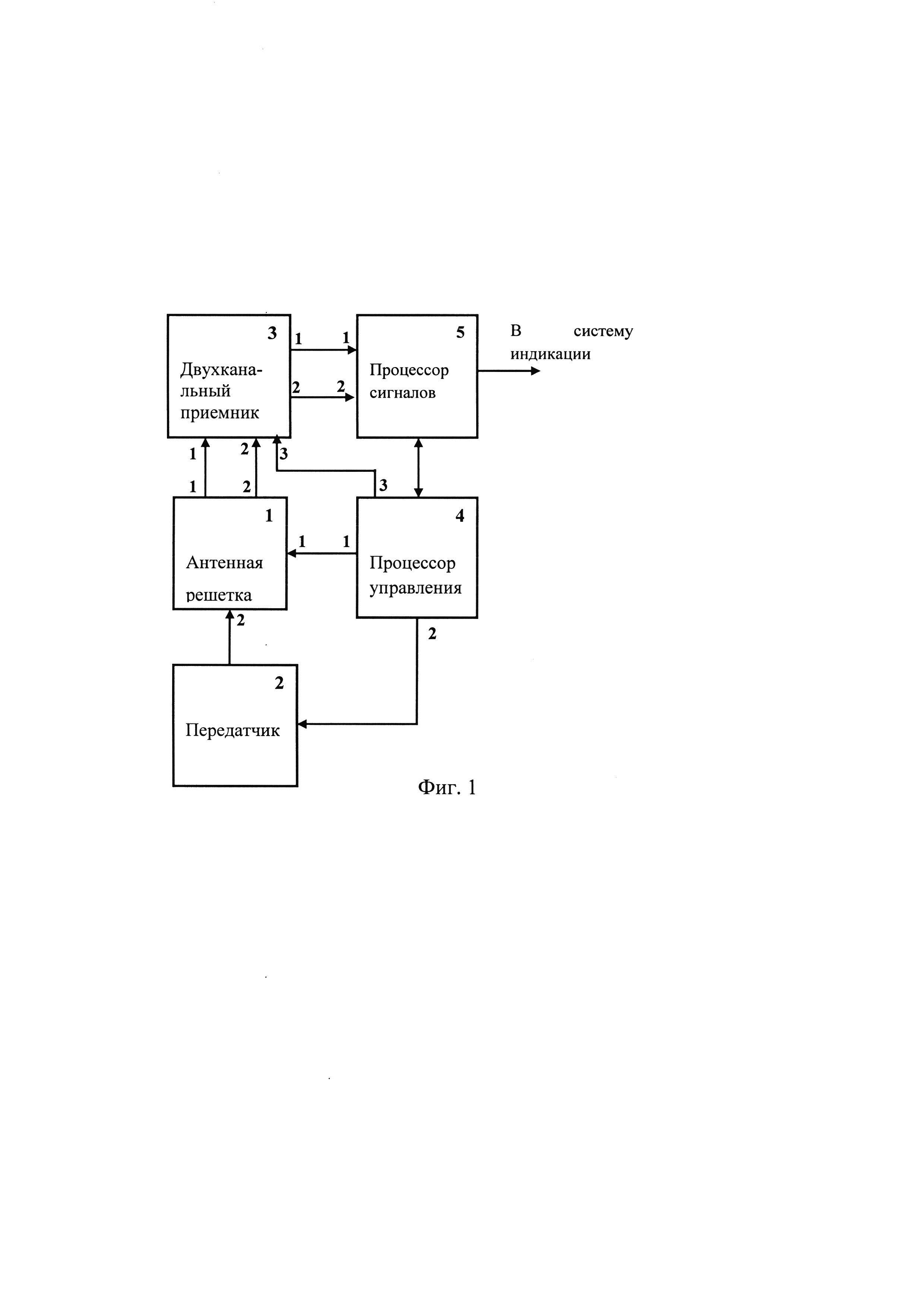
На Фиг. 1 представлена функциональная схема радиолокационной станции, осуществляющей способ.
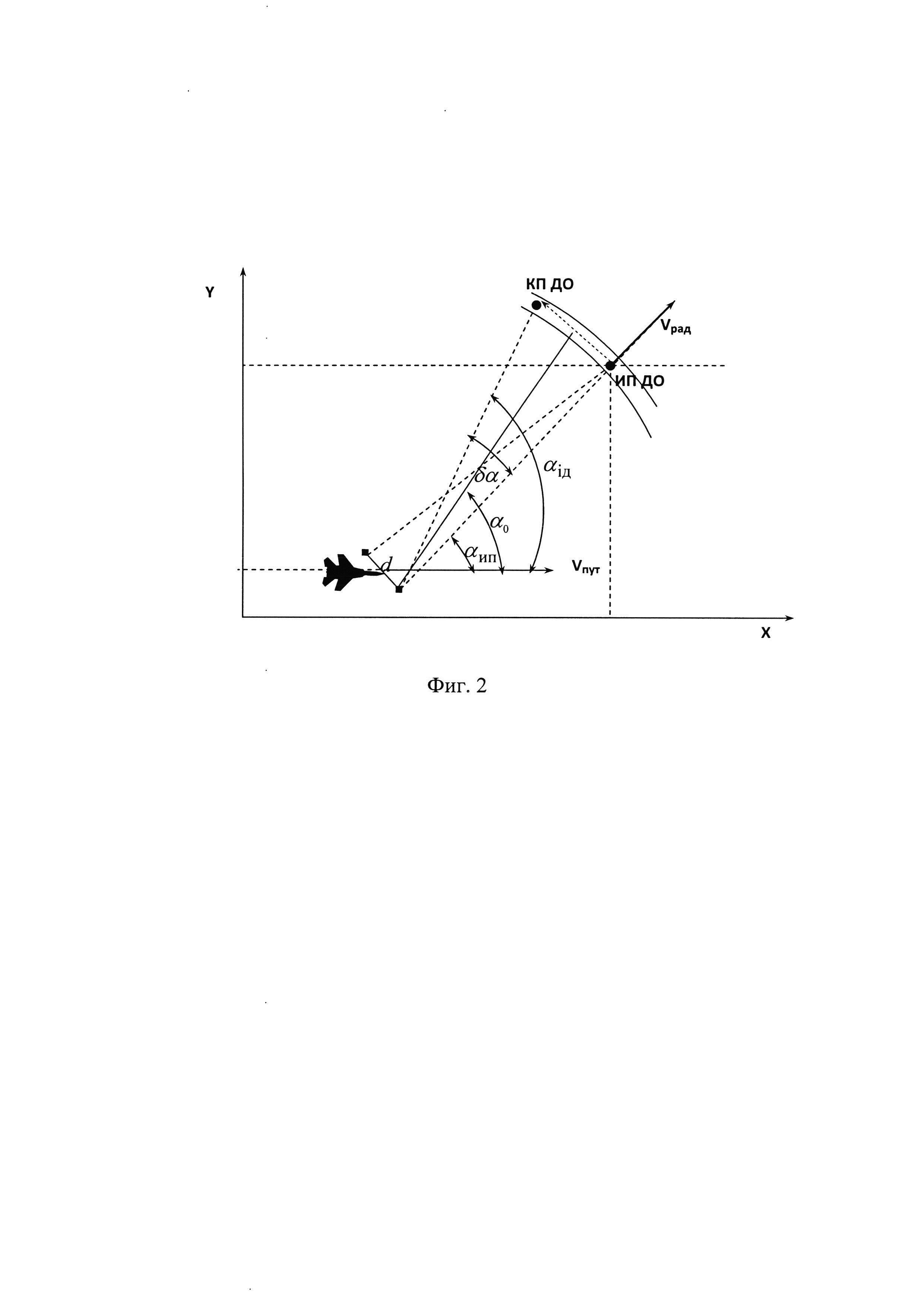
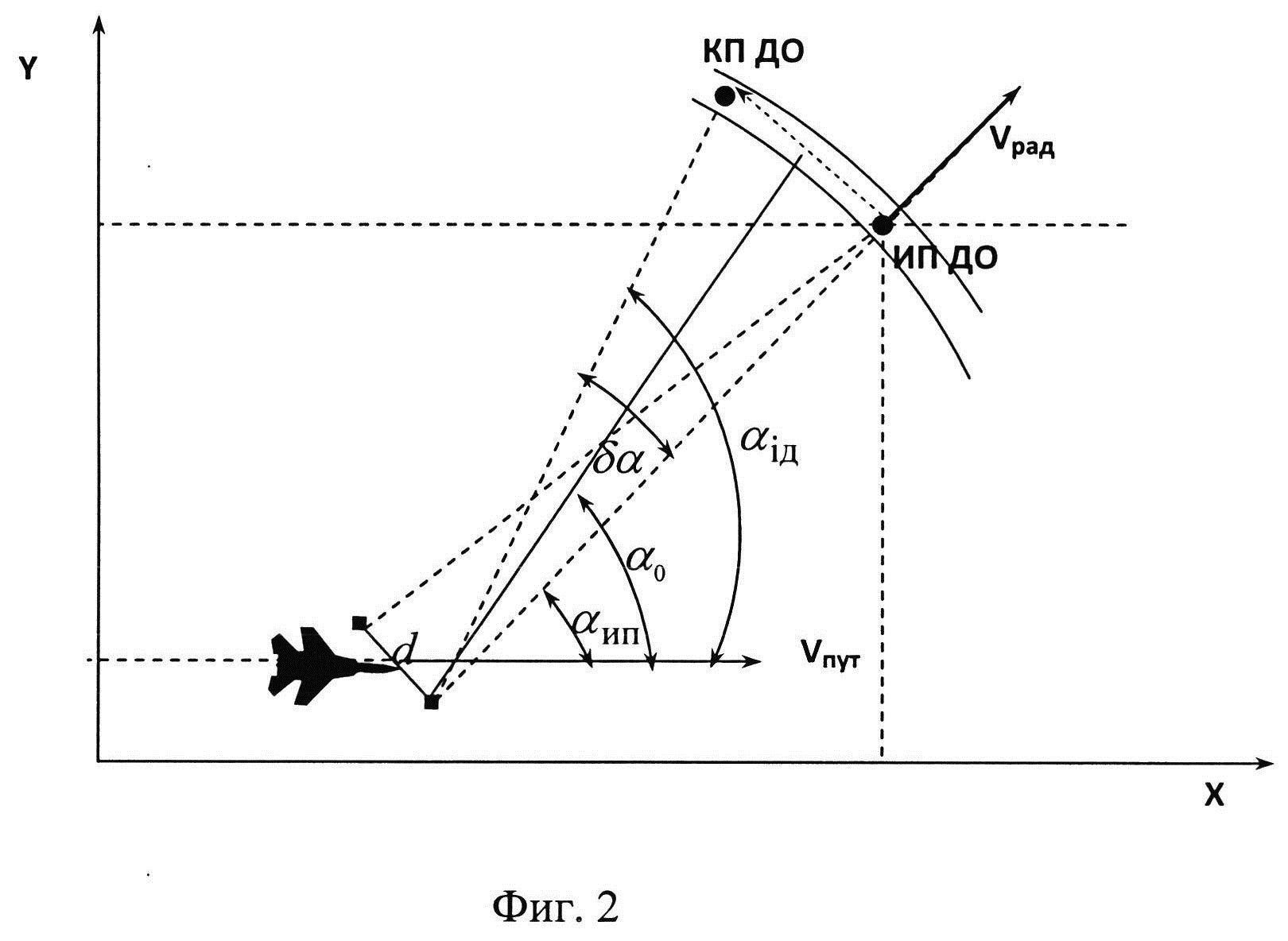
На Фиг. 2 схематично изображен процесс обзора земной поверхности.
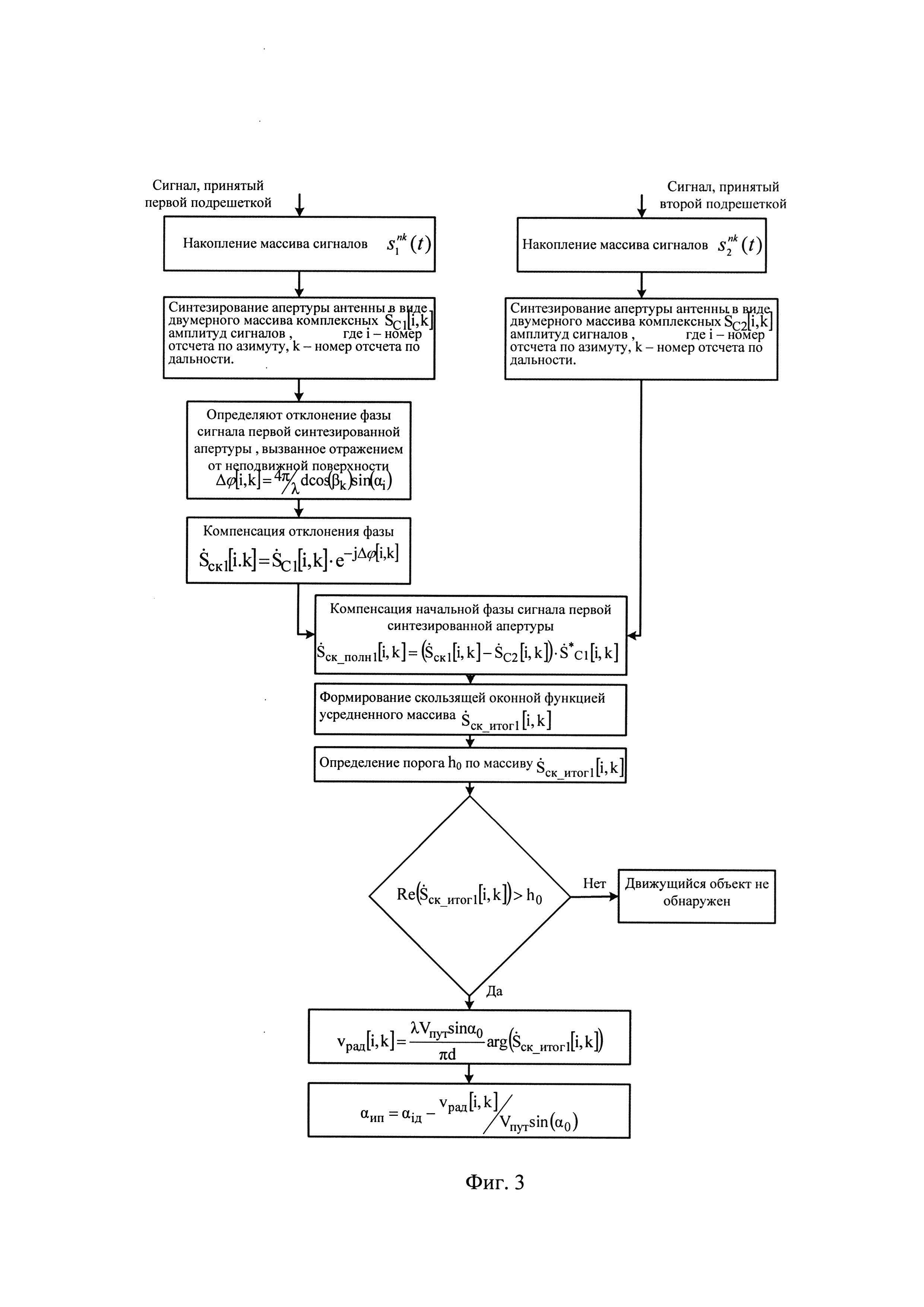
На Фиг. 3 приведена блок-схема алгоритма обработки накопленного радиолокационного сигнала.
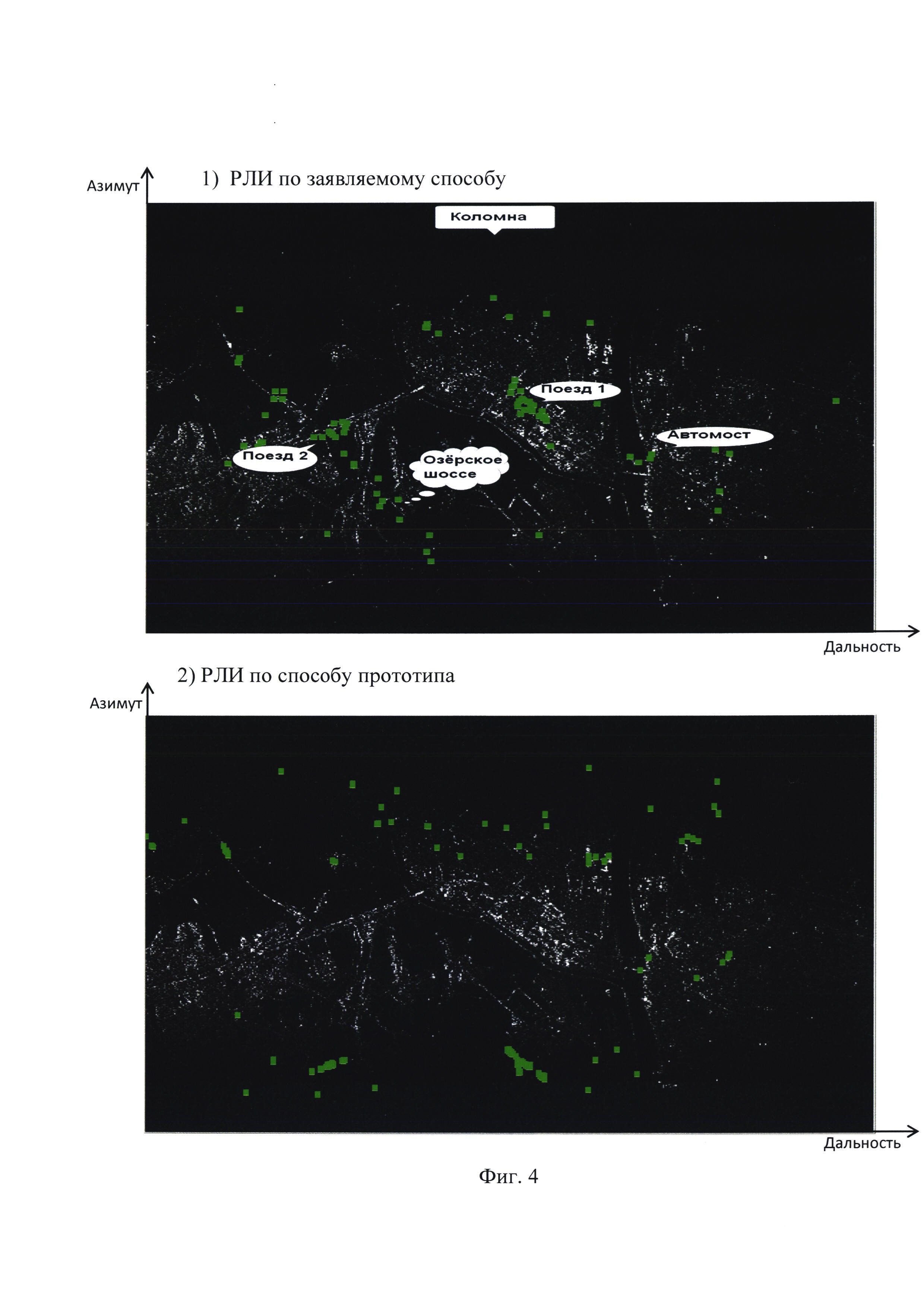
На Фиг. 4 приведены РЛИ с отметками движущихся объектов по заявляемому способу и способу прототипа.
Способ определения азимутального положения наземных движущихся объектов бортовой радиолокационной станцией с антенной решеткой может быть реализован, например, в импульсно-доплеровской БРЛС в режиме работы воздух-поверхность, состоящей из антенной решетки (1) со смещенными по азимуту фазовыми центрами, передатчика (2), двухканального приемника (3), процессора управления (4), процессора сигналов (5). Первый выход процессора управления (4) соединен с первым входом антенной решетки (1), второй выход процессора управления (4) соединен с входом передатчика (2), выход которого соединен со вторым входом антенной решетки (1). Третий выход процессора управления (4) подключен к третьему входу двухканального приемника (3). Первый выход антенной решетки (1) соединен с первым входом двухканального приемника (3), второй выход антенной решетки (1) соединен со вторым входом двухканального приемника (3). Первый выход двухканального приемника (3) подключен к первому входу процессора сигналов (5), второй выход двухканального приемника (3) подключен ко второму входу процессора сигналов (5). Вход-выход процессора сигналов (5) соединен с входом-выходом процессора управления (4). Выход процессора сигналов (5) является внешним выходом БРЛС.
Способ определения азимутального положения наземных движущихся объектов бортовой радиолокационной станцией с антенной решеткой работает следующим образом.
Процессор управления (4) задает параметры управления антенной решетке (1) для телескопического обзора соответствующей зоны обзора. В качестве антенной решетки (1) со смещенными по азимуту фазовыми центрами может использоваться фазированная антенная решетка, состоящая из двух подрешеток, и осуществляющая излучение сигнала диаграммой направленности (ДН) сформированной всей апертурой решетки, а прием двумя независимыми ДН, каждая из которых сформирована отдельной подрешеткой. Величина смещения фазовых центров двух подрешеток определяется характеристиками и параметрами антенной решетки (1), например, может использоваться смещение на половину диаметра антенной решетки (1).
Антенная решетка (1) формирует однолучевую ДН на передачу и излучает, сформированный передатчиком (2), когерентный импульсный радиолокационный сигнал в направлении земной поверхности. В качестве излучаемого сигнала могут использоваться как простые радиоимпульсы, так и сложные модулированные импульсные сигналы - фазокодоманипулированные (ФКМ) или линейно частотно-модулированные (ЛЧМ) и т.д. Первая и вторая подрешетки антенной решетки (1) формируют независимые ДНА на прием и принимают отраженные от земной поверхности сигналы s1(t) и s2(t). Схематично прием этих сигналов подрешетками антенной решетки (1) в процессе обзора поверхности приведен на Фиг. 2. С первого и второго выходов антенной решетки (1) сигналы s1(t) и s2(t) от первой и второй подрешеток поступают на первый и второй входы двухканального приемника (3), где осуществляется аналоговая обработка сигналов s1(t) и s2(t), например усиление, фильтрация и т.д., а затем их аналого-цифровое преобразование. Далее полученные отсчеты сигналов
В процессоре сигналов (5) осуществляют синтезирование апертуры антенны по каждому из сигналов
Следующим этапом обработки сигнала является определение отклонения фазы Δϕ[i,k] сигнала

где λ - длина волны излучаемого сигнала, d - расстояние между фазовыми центрами подрешеток, βk - угол места ДН первой подрешетки для k-го отсчета по дальности, αi - азимутальное направление ДН первой подрешетки антенной решетки (1) для i-го отсчета по азимуту.
Затем компенсируют отклонение фазы Δϕ[i,k] сигнала


где i - номер отсчета по азимуту, k - номер отсчета по дальности, j - мнимая единица.
Следующим этапом является компенсация начальной фазы

Комплексные амплитуды содержат в себе информацию об амплитуде и фазе сигнала, и таким образом, позволяют произвести компенсацию начальной фазы
Разность

Комплексно-сопряженный сигнал можно представить в виде


После компенсации по формуле (1) итоговый сигнал представляет собой сумму сигнала, отраженного от движущегося объекта


Шумоподобный сигнал подавляется операцией усреднения, например, с помощью обработки функцией «скользящее окно». Для каждого отсчета комплексного сигнала
Отсчеты полученного скомпенсированного массива комплексных амплитуд сигнала
Для всех отсчетов скомпенсированного сигнала
где I - общее количество азимутальных отсчетов, полученное при синтезировании апертуры, K - общее количество отсчетов по дальности, полученное в процессе приема сигналов, KП - поправочный коэффициент.
При превышении порога h0 действительной частью отсчета скомпенсированного сигнала

Определенная таким образом i-ая азимутальная позиция является неточной, так как содержит смещение δα, вызванное наличием доплеровского сдвига по частоте в сигнале, отраженном от движущегося объекта. Положение движущегося объекта, соответствующее этой азимутальной позиции αiд, обозначено на Фиг. 2 как «КП ДО» («кажущееся положение»). Поэтому нужно скомпенсировать смещение δα и определить значение азимута αИП, соответствующее истинному положению движущегося объекта, обозначенному на Фиг. 2 как «ИП ДО».
Для этого, зная о наличии движущегося объекта, в отсчетах по азимуту и дальности i, k, определяют его радиальную скорость vрад в процессоре сигналов (5) по соотношению:

где λ - длина волны излучаемого сигнала, d - расстояние между фазовыми центрами подрешеток, Vпут - путевая скорость носителя радиолокатора, α0 - азимут центра зоны обзора,
Определив значение радиальной скорости объекта, определяют смещение δα по формуле
где vрад - радиальная скорость движущегося объекта, Vпут - путевая скорость носителя бортовой радиолокационной станции, α0 - азимут центра зоны обзора.
Затем определяют истинное значение его азимутального положения αИП, путем учета смещения δα, вызванного его движением по формуле:

αiд - i-я азимутальная позиция, в которой обнаружен движущийся объект.
Данный расчет можно выполнить в процессоре управления (4), осуществив передачу рассчитанного значения vрад из процессора сигналов (5). Значение αiд определяется пересчетом из номера азимутальной позиции i по формуле

Далее информация о наличии и координатах движущихся объектов из процессора сигналов (5) поступает в систему индикации для отображения оператору.
На Фиг. 4 приведены два РЛИ в координатах дальность-азимут города Коломна с отметками движущихся объектов, полученных по способу прототипа и заявляемому способу. Как видно на РЛИ, полученном по предлагаемому способу (обозначено 1), движущиеся объекты сгруппированы точно на дорогах (Озерское шоссе, Автомост), движущиеся железнодорожные составы на ж/д путях, в отличие от РЛИ прототипа (обозначено 2), где движущиеся объекты смещены относительно дорог.
Таким образом, за счет компенсации фазовых отклонений сигнала путем совместной обработки сигналов, принятых двумя подрешетками антенной решетки со смещенными по азимуту фазовыми центрами, осуществляется подавление мешающих отражений, обнаружение движущихся объектов на фоне земной поверхности и последующее определение их азимутального положения с высокой точностью.
Реферат
Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) для определения азимутального положения наземных движущихся объектов. Техническим результатом является подавление мешающих отражений сигнала от земной поверхности. Заявленный способ основан на телескопическом обзоре участка земной поверхности, с излучением импульсного когерентного радиолокационного сигнала и приемом отраженных сигналов s1(t), s2(t) первой и второй подрешетками антенной решетки со смещенными по азимуту фазовыми центрами бортовой радиолокационной станции, когерентном накоплении принятых сигналы s1(t), s2(t), синтезе апертуры антенны по каждому из сигналов s1(t) и s2(t) в виде двух массивов комплексных амплитуд сигналов
Формула





Документы, цитированные в отчёте о поиске
Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией
Способ измерения угловых координат целей радиолокационной станцией с цифровой антенной решеткой
Способ радиолокационной съёмки земли и околоземного пространства радиолокатором с синтезированной апертурой антенны в неоднозначной по дальности полосе с селекцией движущихся целей на фоне отражений от подстилающей поверхности и радиолокатор с синтезирова
Комментарии