Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией - RU2691771C1
Код документа: RU2691771C1
Чертежи
Описание
Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) для обнаружения движущихся целей на фоне подстилающей поверхности.
Известен «Способ селекции движущихся наземных целей РЛС с синтезированной апертурой» [RU 2205423, опубликовано 27.05.2003, МПК G01S 13/52]. Способ заключается в том, что формируют три синтезированные апертуры, определяют разностные сигналы между сигналами первого и второго, второго и третьего цифровых каналов обработки, соответствующих трем синтезируемым апертурам, определяют сдвиг фаз между разностными сигналами, определяют радиальную скорость движущейся цели и количество отсчетов смещения изображения движущейся цели относительно ее истинного положения. Причем отраженные сигналы принимают одним приемным трактом, синтезированные апертуры формируют путем запоминания и последующей раздельной обработки отсчетов принятых сигналов в трех каналах цифровой обработки сигналов таким образом, что в первом канале обработке подвергаются отсчеты сигналов с 1-го по N-й, во втором со 2-го по N+1-й, в третьем с 3-го по N+2-й, а разностные сигналы определяют предварительно изменив фазы вычитаемых сигналов для компенсации пространственного различия фазовых центров синтезированных апертур.
Известен «Способ обнаружения наземных движущихся целей» [RU 2042151, опубликовано 20.08.1995, МПК G01S 13/52]. Способ включает в себя режекцию низкочастотной помехи в когерентно принятом отраженном сигнале, выделение огибающей, накопление сигналов и сравнение их с адаптивным порогом. После выделения огибающей сигнала определяют ее корреляционную функцию, выделяют огибающую корреляционной функции, режектируют помеховые составляющие огибающей корреляционной функции, накапливают сигналы прорежектированной огибающей корреляционной функции, а в качестве порога используют промасштабированный в соответствии с заданным уровнем ложной тревоги нулевой отсчет огибающей корреляционной функции.
Недостатком указанных способов является их низкая чувствительность из-за обнаружения наземных целей по амплитуде сигнала.
Наиболее близким по технической сущности является «Способ измерения угла сноса летательного аппарата бортовой радиолокационной станцией (БРЛС)» [RU 2660159, опубликовано 05.07.2018, МПК G01S 13/60], заключающийся в том, что осуществляют когерентное излучение сигнала одним лучом на передачу, перекрывающим по ширине лучи на прием, формируют антенной БРЛС на прием два независимых луча, разнесенных по азимуту, когерентно принимают импульсные сигналы, отраженные от земной поверхности, в процессе сканирования двумя лучами земной поверхности по азимуту в переднем секторе обзора относительно строительной оси летательного аппарата-носителя БРЛС. Кроме того принятые сигналы стробируют по дальности, осуществляют аналого-цифровое преобразование сигналов, когерентно накапливают сигналы принятые во всем секторе обзора, определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу, отраженными от одного и того же участка земной поверхности. Определяют между скомпенсированными сигналами усредненную по стробам дальности и излученным импульсам сигналов разность фаз, фиксируют сигналы, величина усредненной разности фаз которых меняет знак на противоположный, определяют направление на участок земной поверхности, от которого были приняты эти сигналы. Угол сноса определяют как угол между этим направлением и строительной осью летательного аппарата-носителя БРЛС в горизонтальной плоскости относительно земной поверхности.
Недостатком указанного способа является невозможность обнаружения наземных движущихся целей.
Техническим результатом предлагаемого изобретения является повышение вероятности обнаружения наземных движущихся целей.
Технической проблемой решаемой предлагаемым изобретением является создание способа обнаружения наземных движущихся целей с высокой вероятностью в широком диапазоне азимутальных углов для реализации в бортовых радиолокационных станциях летательных аппаратов.
Сущность изобретения заключается в том, что в процессе сканирования в заданном секторе обзора лучом диаграммы направленности антенны (ДНА) на передачу когерентно излучают импульсный сигнал, принимают отраженный от земной поверхности импульсный сигнал двумя независимыми лучами ДНА на прием, разнесенными по азимуту, причем луч ДНА на передачу перекрывает по ширине лучи ДНА на прием. Принятые по каждому лучу ДНА сигналы стробируют по дальности, осуществляют их аналого-цифровое преобразование, когерентно накапливают принятые сигналы во всем секторе обзора, определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу ДНА, отраженными от одного и того же участка земной поверхности.
Новым в заявляемом способе является то, что после завершения накопления сигналов из них формируют два массива отсчетов сигналов, определяют крутизну частотной модуляции накопленных сигналов, а компенсацию временной задержки между отсчетами массивов сигналов осуществляют одновременно с устранением частотной модуляции сигналов, путем их гетеродинирования. Затем преобразуют скомпенсированные массивы сигналов в частотную область, определяют разность фаз между преобразованными в частотную область массивами сигналов для всех частот и стробов дальности. Рассчитывают пороговое значение разности фаз по всем отсчетам массивов сигналов. Сравнивают значения разности фаз для всех частот и стробов дальности с пороговым значением, при превышении разностью фаз порогового значения фиксируют наличие движущейся цели в отсчете сигнала на соответствующей частоте и в соответствующем стробе дальности. Преобразование массивов сигналов в частотную область осуществляют быстрым преобразованием Фурье. Два независимых луча диаграммы направленности антенны на прием разнесены по азимуту на величину 1-3 ширины луча по азимуту. Пороговое значение разности фаз рассчитывают как 1.5-2 среднеквадратических отклонения разности фаз между отсчетами массивов сигналов.
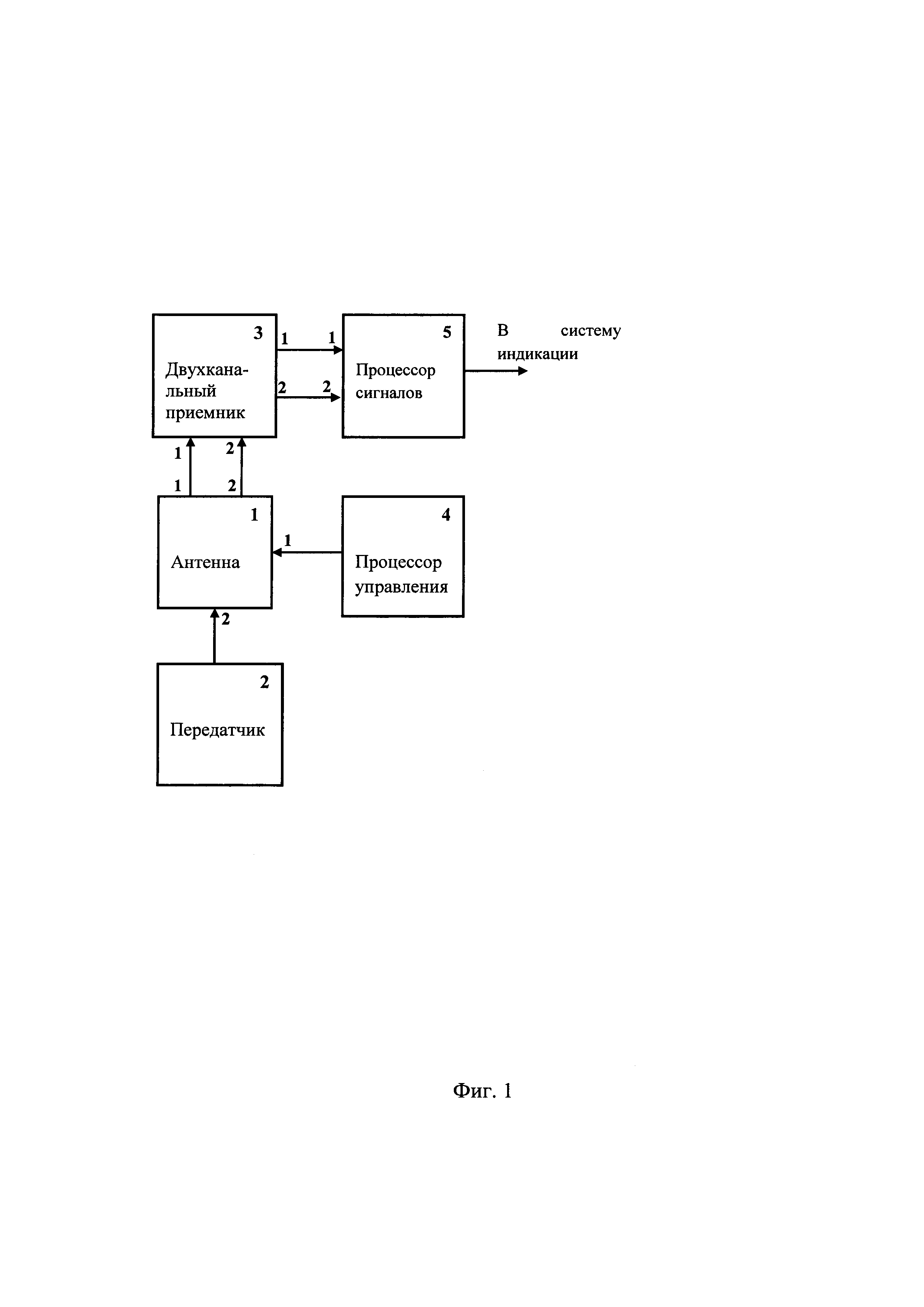
На Фиг. 1 представлена функциональная схема радиолокационной станции, осуществляющей способ.
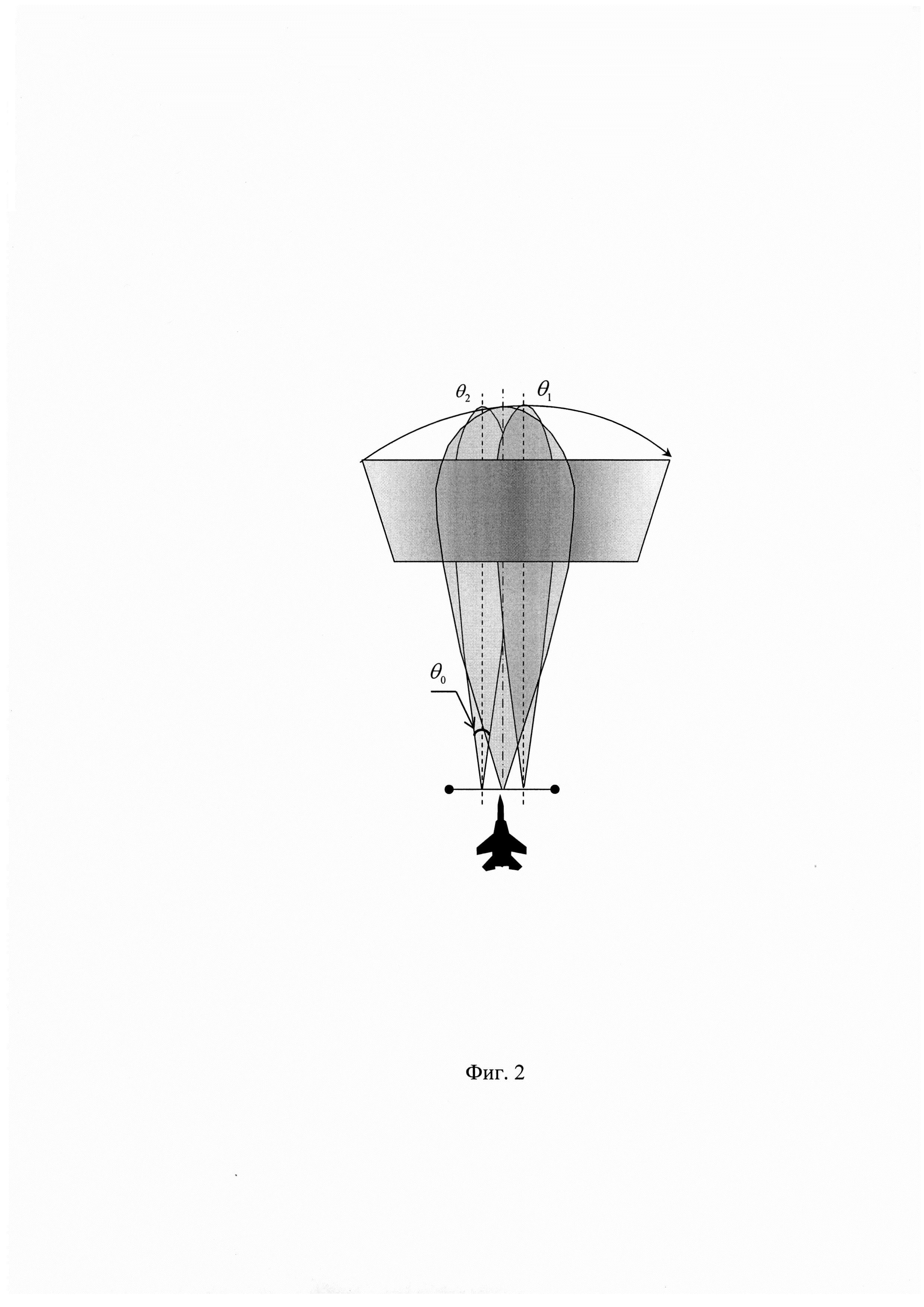
На Фиг. 2 схематично изображен процесс сканирования лучами ДНА земной поверхности.
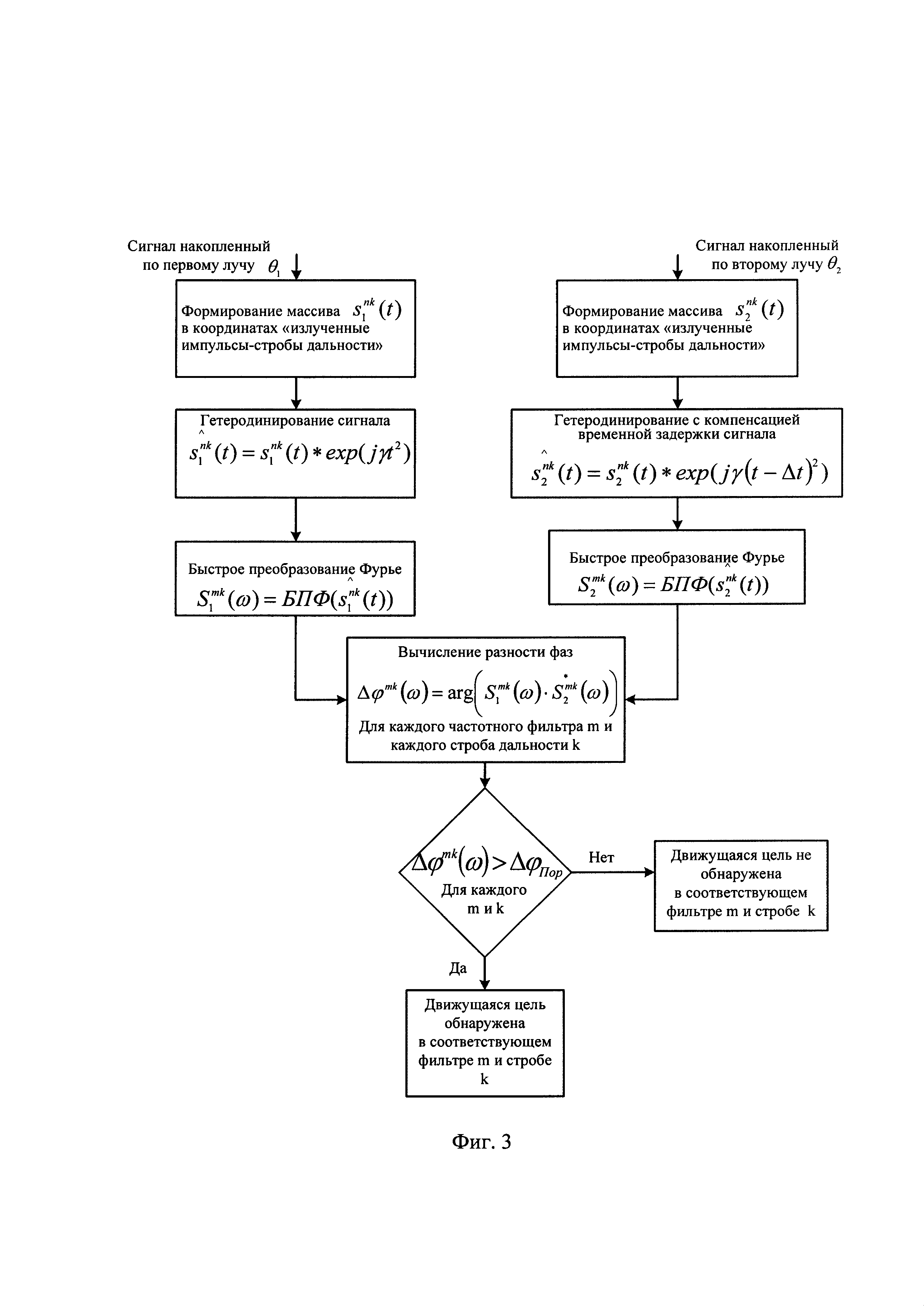
На Фиг. 3 приведена блок-схема алгоритма обработки накопленного радиолокационного сигнала.
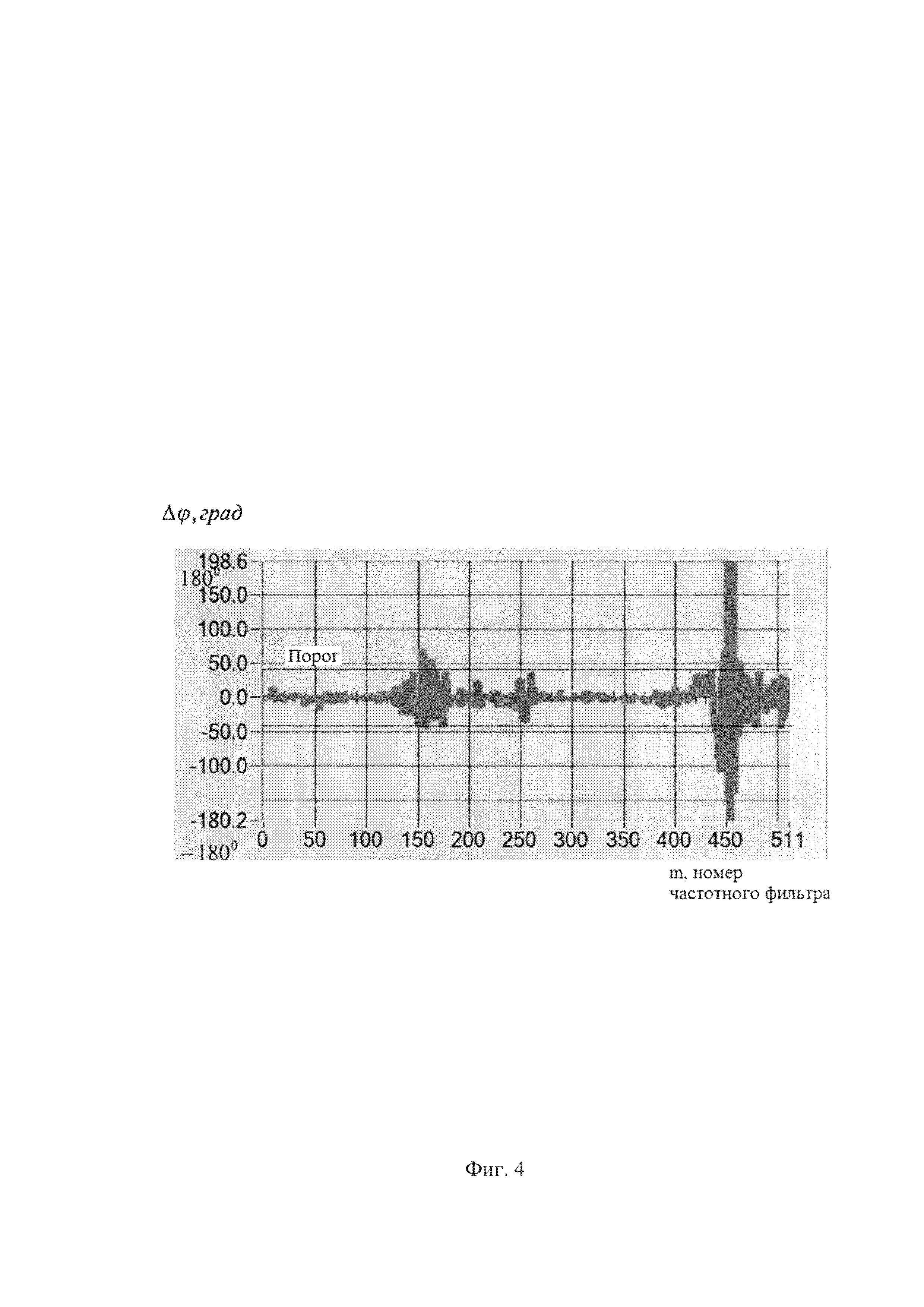
На Фиг. 4 приведен график экспериментальной зависимости разности фаз от номера частотного фильтра в одном стробе дальности.
Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией может быть реализован, например, в импульсно-доплеровской БРЛС в режиме работы воздух-поверхность, состоящей из антенны (1), передатчика (2), двухканального приемника (3), процессора управления (4), процессора сигналов (5). Выход процессора управления (4) соединен с первым входом антенны (1), выход передатчика (2) соединен со вторым входом антенны (1). Первый выход антенны (1) соединен с первым входом двухканального приемника (3), второй выход антенны (1) соединен со вторым входом двухканального приемника (3). Первый выход двухканального приемника (3) подключен к первому входу процессора сигналов (5), второй выход двухканального приемника (3) подключен ко второму входу процессора сигналов (5). Выход процессора сигналов (5) является внешним выходом БРЛС.
Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией работает следующим образом.
Процессор управления (4) задает параметры управления антенне (1) для просмотра соответствующей зоны обзора. Антенна (1) формирует широкую однолучевую диаграмму направленности (ДНА) на передачу, а на прием ДНА, состоящую из двух узких лучей разнесенных по азимуту, например на величину 1.5 θ0, где θ0 ширина луча ДНА по азимуту, и выставляет ее на одну из границ зоны обзора, например на левую границу. При этом ширина однолучевой ДНА на передачу больше либо равна ширине двухлучевой ДНА на прием, чтобы обеспечить их перекрытие. После установки лучи ДНА начинают плавно перемещаться слева направо в азимутальной плоскости, проводя сканирование зоны обзора по азимуту (процесс показан на Фиг. 2). В процессе обзора антенна (1) излучает, сформированный передатчиком (2), когерентный импульсный радиолокационный сигнал.
Отраженный от земной поверхности сигнал принимается антенной (1) независимо по каждому из двух лучей θ1 и θ2 (Фиг. 2). С первого и второго выходов антенны (1) сигналы поступают на первый и второй входы двухканального приемника (3), где осуществляется обработка сигналов: сигналы, принятые по каждому лучу, стробируют по дальности, осуществляют их аналого-цифровое преобразование. Затем когерентно накапливают сигналы в процессоре сигналов (5). Процесс излучения/приема радиолокационного сигнала осуществляется в ходе сканирования лучами ДНА земной поверхности в заданном секторе обзора по закону, заданному процессором управления (4). По окончании сканирования завершается когерентное накопление сигналов в процессоре сигналов (5).
После завершения когерентного накопления сигналов s1(t) и s2(t) в процессоре сигналов (5) формируют два массива отсчетов сигналов в координатах «излученные импульсы - стробы дальность»


Относительно одной точки на поверхности Земли между сигналами s1(t) и s2(t), принятыми по двум независимым лучам, присутствует задержка
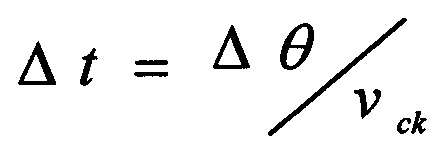


Где t - время, j - мнимая единица, γ - крутизна частотной модуляции сигнала, Δt - временная задержка между сигналами
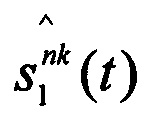
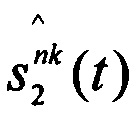
Далее массивы сигналов
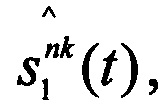

Массивы отсчетов сигналов
Далее вычисляют разность фаз между отсчетами массивов сигналов
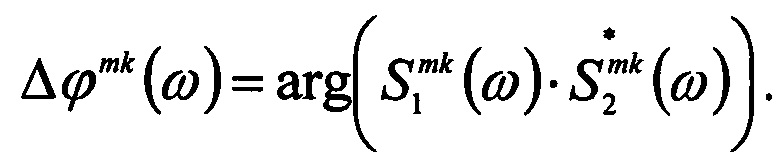
Далее для обнаружения целей осуществляют обработку полученного массива разностей фаз Δϕmk(ω). На первом этапе обработки массива Δϕmk(ω) рассчитывают пороговое значение разности фаз сигналов. Для этого рассчитывают среднеквадратическое отклонение (СКО) разности фаз массива Δϕmk(ω) и в качестве порогового значения принимают, например 1.5 СКО. Затем в процессоре сигналов (5) полученные значения разности фаз Δϕmk(ω) на всех частотах и во всех стробах дальности сравнивают с пороговым значением. На фигуре 4 приведен график зависимости разности фаз от частоты для одного строба дальности. На графике видны скачки разности фаз в окрестности 150 и 450 фильтров, соответствующие двум движущимся наземным целям. В окрестности 250 частотного фильтра, также наблюдается всплеск разности фаз, однако он не превышает порогового значения.
Определяемая разность фаз между сигналами отраженными от движущихся целей возникает за счет изменения азимута движущейся цели за время задержки между двумя лучами ДНА Δt, в отличие от неподвижной цели и подстилающей поверхности. При превышении разностью фаз порогового значения для соответствующих частоты и строба дальности фиксируют наличие движущейся цели. Далее информация о наличии целей из процессора сигналов (5) поступает в систему индикации для отображения пилоту.
Таким образом осуществляется обнаружение движения в широком секторе обзора земной поверхности по азимуту с фазовым разделением сигналов отраженных от движущихся и неподвижных объектов.
Реферат
Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных станциях (БРЛС) для обнаружения движущихся целей на фоне подстилающей поверхности. Способ основан на том, что в процессе сканирования в заданном секторе обзора лучом диаграммы направленности антенны (ДНА) на передачу когерентно излучают импульсный сигнал, принимают отраженный от земной поверхности импульсный сигнал двумя независимыми лучами ДНА на прием, разнесенными по азимуту, причем луч на передачу перекрывает по ширине лучи ДНА на прием. Принятые по каждому лучу ДНА сигналы стробируют по дальности, осуществляют их аналого-цифровое преобразование, когерентно накапливают принятые сигналы во всем секторе обзора. После завершения накопления сигналов из них формируют два массива отсчетов сигналов, определяют крутизну частотной модуляции накопленных сигналов, определяют и компенсируют временную задержку между сигналами, принятыми по каждому независимому лучу, отраженными от одного и того же участка земной поверхности одновременно с устранением частотной модуляции сигналов, путем их гетеродинирования. Преобразуют скомпенсированные массивы сигналов в частотную область, определяют разность фаз между преобразованными в частотную область массивами сигналов для всех частот и стробов дальности, рассчитывают пороговое значение разности фаз по всем отсчетам массивов сигналов. Сравнивают значения разности фаз для всех частот и стробов дальности с пороговым значением, при превышении разностью фаз порогового значения фиксируют наличие движущейся цели в отсчете сигнала на соответствующей частоте и в соответствующем стробе дальности. Технический результат заключается в повышении вероятности обнаружения движущихся целей. 3 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией
Комментарии