Способ обеспечения курсовой устойчивости и безопасности автомобиля и устройство для его осуществления - RU2660977C2
Код документа: RU2660977C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к технике обеспечения безопасности дорожного движения, в частности к автомобильным средствам обзора пространства в переднебоковом секторе и удержания автомобиля в заданной полосе движения.
УРОВЕНЬ ТЕХНИКИ
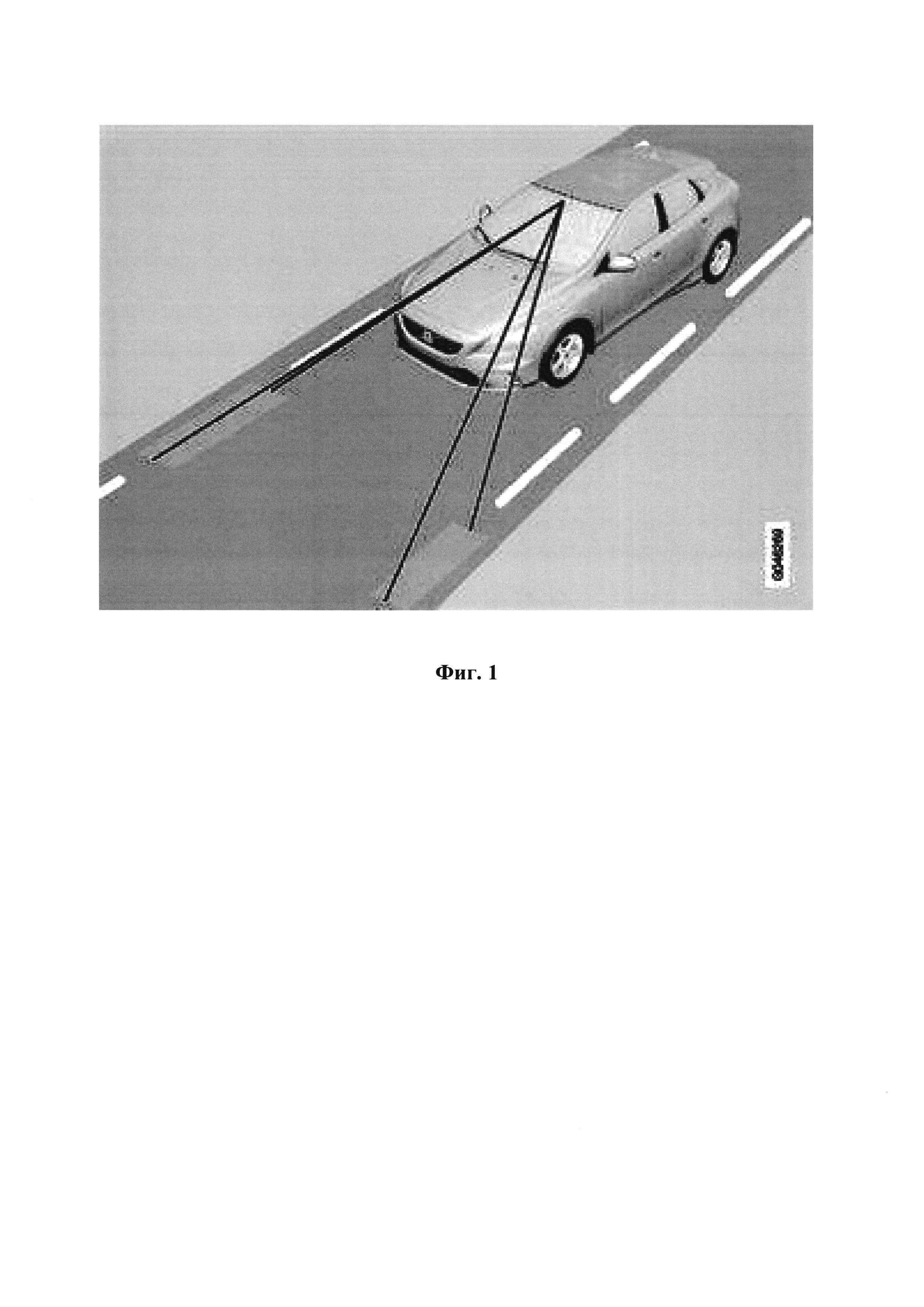
Известны оптические способ и устройство контроля полосы движения автомобиля, например патент США «Система и способ контроля полосы движения транспортного средства» [1]. Известен также способ помощи движению по автомобильной полосе [2], который реализован в системе удержания полосы движения. Этот способ-аналог основан на контроле выхода автомобиля из полосы движения на шоссе с правильно нанесенной разметкой. Контроль текущего положения автомобиля на шоссе осуществляется путем считывания боковой разметки или полосы движения с помощью установленной на борту телевизионной камеры. При выходе автомобиля из полосы движения водителю подается сигнал предупреждения. Принцип действия системы показан на Фиг. 1.
К недостаткам способа-аналога относятся зависимость работоспособности системы от погодных условий и времени суток. При плохой видимости система не работает. Кроме того, система работает только на дорогах с четко и правильно нанесенными боковыми линиями разметки. Дальность действия системы невелика и она ограничена техническими возможностями видеокамеры (до 60 м в простых метеоусловиях). Обледенение и запотевание объектива камеры приводит к потере ее работоспособности.
Известно устройство для помощи движению по автомобильной полосе [3]. Это устройство не только предупреждает водителя о выходе из полосы, но и активно выруливает автомобиль.
Устройство помощи движению по полосе является электронной системой и включает клавишу управления, видеокамеру, блок управления и исполнительные механизмы. С помощью клавиши управления производится включение системы.
Видеокамера производит запись изображения на определенном расстоянии от автомобиля и его оцифровку. В системе используется монохромная камера, которая распознает линии разметки как резкое изменение градации серого. Камера объединена с блоком управления. Исполнительными устройствами системы помощи движения по полосе являются контрольная лампа, звуковой сигнал, вибромотор на рулевом колесе, электродвигатель электромеханического усилителя руля.
Информация о работе системы выводится на панель приборов с помощью контрольной лампы. Предупреждение водителя производится с помощью вибрации рулевого колеса, а также подачи визуальных звуковых и световых сигналов. Вибрацию создает вибромотор, встроенный в рулевое колесо.
Корректировка траектории движения осуществляется принудительным подруливанием системы рулевого управления с помощью электромеханического усилителя руля (большинство систем) или подтормаживанием колес с одной стороны автомобиля (система Lane Departure Prevention).
Во время работы активной системы помощи движения по полосе реализуются следующие основные функции:
- распознавание траектории полосы движения;
- визуальное информирование о работе системы;
- корректировка траектории движения;
- предупреждение водителя.
Обстановка перед автомобилем проецируется на светочувствительную матрицу камеры и преобразуется в черно-белое изображение, которое анализируется электронным блоком управления.
Алгоритм работы блока управления определяет положение линий разметки полосы, оценивает качество распознавания разметки, вычисляет ширину полосы и ее кривизну, рассчитывает положение автомобиля на полосе. На основании проведенных вычислений осуществляется управляющее воздействие на рулевое управление (тормозную систему), и если требуемый эффект удержания автомобиля на полосе не достигается - предупреждается водитель (вибрация рулевого колеса, звуковой и световой сигналы).
Необходимо отметить, что величина крутящего момента, прикладываемого к рулевому механизму (тормозного усилия на двух колесах с одной стороны автомобиля), невелика и в любой момент может быть преодолена водителем.
Устройство-аналог имеет следующие недостатки: при неблагоприятных условиях (отсутствие одной линии или всей разметки, загрязненное или заснеженное дорожное полотно, узкая полоса движения, нестандартная разметка на ремонтируемых участках, поворот малого радиуса) система деактивируется. Ни один из известных аналогов не обеспечивает контроль выхода из полосы движения в сложных метеоусловиях, в условиях отсутствия дорожной разметки, на неочищенной от снега и льда трассе.
Наиболее близким к заявляемому способу обеспечения курсовой устойчивости автомобиля (способом-прототипом) является способ, реализованный в системе помощи движению по полосе [4]. Эта система помогает водителю предотвращать аварийные ситуации путем контроля выбранной полосы движения. Система предупреждает водителя об отклонении от выбранной полосы движения.
Система помощи движению по полосе работает следующим образом. Текущая обстановка перед автомобилем проецируется на светочувствительную матрицу и преобразуется в черно-белое изображение, которое анализируется электронным блоком управления. Алгоритм работы блока управления включает операции определения положения линий разметки полосы, вычисления ширины полосы и ее кривизны, расчета положения автомобиля на полосе.
Таким образом, работа активной системы помощи движению по полосе включает следующие основные функции: распознавание траектории полосы движения; визуальное информирование водителя о работе системы; корректировка траектории движения; предупреждение водителя.
Недостатком описанного выше способа-прототипа является его низкая эффективность в условиях сложной метеорологической обстановки на дорогах. Другим недостатком системы-прототипа является ограниченный радиус действия видеокамеры и зависимость качества ее работы от наличия и контрастности дорожных полос разметки, полная неработоспособность при наличии снега и льда на проезжей части.
Система, известная из источника [4], предупреждает водителя об отклонении от выбранной полосы движения и подает управляющие воздействия на руль и колеса автомобиля. Эта система включает в свой состав следующие основные элементы:
- цифровую видеокамеру;
- блок управления;
- исполнительные устройства.
Видеокамера производит запись изображения на определенном расстоянии от автомобиля и его преобразование в цифровую форму. По шине передачи цифровых данных видеокамера соединена с блоком управления. Блок управления на основе обработки поступающей от видеокамеры информации контролирует траекторию движения автомобиля и формирует команды на исполнительные устройства при отклонении автомобиля от движения по выбранной полосе. Исполнительные устройства включают в свой состав вибрационные устройства, сигнальные лампы и звуковые сигналы для индикации опасного отклонения.
Недостатком описанного выше устройства-прототипа является ограниченный радиус действия видеокамеры и зависимость качества ее работы от наличия и контрастности дорожных полос разметки и погодных условий, а также полная неработоспособность при наличии снега и льда на проезжей части.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Заявленное изобретение направлено на повышение безопасности дорожного движения в сложных метеоусловиях и при отсутствии или нарушении дорожной разметки на шоссе. Поставленная цель достигается тем, что используется новый принцип определения положения автомобиля на дороге в движении. В отличие от способа-прототипа, исходной информацией для определения положения автомобиля на заданной полосе является радиолокационный контраст между отражениями от полотна дороги и отражениями от местных предметов в передней полусфере движущегося автомобиля (на обочинах справа и слева по курсу от дорожного полотна). Контраст соответствует границе между дорожным полотном и обочиной и позволяет определить ширину дорожного полотна, его кривизну, а также наличие на нем препятствий. Обработка радиолокационного изображения (РЛИ) позволяет в динамике точно определять текущее местоположение автомобиля на дороге по двум пространственным координатам и анализировать курс движения автомобиля (в том числе путем экстраполяции траектории) и отклонение его от оптимального (безопасного) курса движения.
Цель изобретения достигается тем, что в способе обеспечения курсовой устойчивости и безопасности движения автомобиля выполняются этапы, на которых:
- получают изображение дорожного полотна;
- анализируют наличие разметки на дорожном полотне и в случае ее наличия обрабатывают данные о ней;
- распознают положения линий разметки полосы или крайние точки дорожного полотна;
- вычисляют ширину полосы движения или области полотна дороги, предназначенной для движения автомобиля, и кривизну упомянутой полосы и области полотна дороги;
- выполняют расчет положения автомобиля на текущей полосе движения или области полотна дороги;
- выполняют радиолокационное зондирование переднебоковой полусферы сектора перед автомобилем с высоким разрешением по курсу движения с помощью бортовой РЛС с синтезированной апертурой;
- формируют цифровое радиолокационное изображение (РЛИ) и/или радиоголограмму полотна дороги и предметов, расположенных на обочинах справа и слева от полотна дороги;
- выполняют автоматическое распознавание на РЛИ и/или радиоголограмме границы между дорожным полотном и обочинами с помощью анализа отраженных сигналов на коллинеарных и перекрестных поляризациях;
- определяют векторную скорость движения автомобиля;
- экстраполируют траекторию движения автомобиля с учетом текущей векторной скорости;
- вычисляют оценку наступления экстренного события на основании упомянутой экстраполяции;
- активируют средства безопасности автомобиля на основании упомянутой оценки.
Поставленная цель изобретения достигается также с помощью устройства обеспечения курсовой устойчивости и безопасности автомобиля, которое содержит панель управления, цифровую видеокамеру, блок обмена данными с бортовым компьютером, микроконтроллер, блок управления, блок сопряжения с исполнительными устройствами, средства сигнализации, средства безопасности автомобиля, причем блок обмена данными с бортовым компьютером одновременно сопряжен с панелью управления, микроконтроллером и блоком управления, а микроконтроллер по шине передачи цифровых данных сопряжен с цифровой видеокамерой и блоком управления, выход которого через блок сопряжения с исполнительными устройствами соединен с исполнительными устройствами, представляющими собой средства сигнализации и безопасности автомобиля, отличающееся тем, что в устройство дополнительно введена РЛС с синтезированной апертурой, выход которой соединен шиной передачи цифровых данных с микроконтроллером, а к блоку сопряжения с исполнительными устройствами дополнительно подключены такие средства безопасности автомобиля, как мобильное средство связи, аварийная сигнализация и автопилот, причем микроконтроллер выполнен с возможностью обработки данных, полученных от видеокамеры и бортовой РЛС, на основании которых выполняет расчет векторной скорости движения автомобиля, осуществляет экстраполяцию траектории движения автомобиля с учетом текущей векторной скорости, вычисление оценки наступления экстренного события на основании упомянутой экстраполяции и активации средств безопасности автомобиля на основании упомянутой оценки.
В одном из частных вариантов заявленного способа дополнительно индицируют текущее положение автомобиля и результат экстраполяции траектории его движения на дисплее электронного устройства.
В другом частном варианте заявленного способа дополнительно отображают препятствия на дорожном полотне.
В другом частном варианте заявленного способа при анализе наличия препятствий учитываются полосы движения попутного и встречного направления и зона обочины.
В другом частном варианте заявленного способа электронное устройство представляет собой головное мультимедийное устройство автомобиля.
В другом частном варианте заявленного способа электронное устройство представляет собой электронное мобильное устройство.
В другом частном варианте заявленного способа мобильное устройство представляет собой смартфон или планшет, или ноутбук.
В другом частном варианте заявленного способа изображение на дисплее головного мультимедийного устройства автомобиля дублирует информацию о траектории движения автомобиля, а также имеющихся на дороге препятствий на электронное мобильное устройство.
В другом частном варианте заявленного способа экстренное событие представляет собой непреднамеренное смещение автомобиля в зону обочины или вероятность столкновения с объектом, или занос.
В другом частном варианте заявленного способа в зависимости от типа экстренного события активируется автопилот или экстренное торможение, или система предотвращения заноса, или аварийная сигнализация автомобиля, или их комбинация.
В другом частном варианте заявленного способа при активации автопилота задействуется система удерживания автомобиля в полосе движения или участке дорожного полотна движения автомобиля.
Сущность предлагаемого способа обеспечения курсовой устойчивости автомобиля заключается в реализации новой технологии получения информации для определения оптимальной полосы движения. Всю необходимую для этой цели информацию обеспечивает процедура радиолокационного зондирования переднебоковой области пространства впереди и справа - слева от автомобиля с высоким разрешением объектов зондирования. Высокое разрешение обеспечивает РЛС с синтезированной апертурой. Отражения от однородного дорожного полотна существенно отличаются от отражений от местных предметов на обочинах дорог. Характер отражений от дорожного покрытия в основном зеркальный, в то время как характер отражений от местных предметов на обочинах дорог - преимущественно диффузный. Вдоль дорог располагается достаточно большое количество вертикально-протяженных объектов (бордюры, ограждения, столбы, кустарник, деревья и проч.). Уровень (интенсивность) отражения от них зондирующего сигнала РЛС будет наибольшим, если поляризация излучаемого РЛС сигнала будет коллинеарной (вертикальной). В то же время интенсивность отражения от дорожного полотна при этом будет минимальной. Использование этого свойства позволяет в динамике точно распознавать границы дорожного полотна за счет резкого изменения интенсивности принятых отраженных сигналов от дороги и от местных предметов на обочинах.
Технический результат от использования предложенного способа и устройства для его осуществления заключается в том, что предложенные технические решения обеспечивают курсовую устойчивость автомобиля в сложных метеорологических условиях, в том числе и на дорогах с отсутствующей или нарушенной дорожной разметкой, за счет повышения точности распознавания участков дороги и объектов на таких участках, которые могут привести к возникновению экстренной ситуации при движении транспортного средства.
Разрешающая способность современных цифровых малогабаритных и дешевых РЛС с синтезированной апертурой составляет единицы-десятки сантиметров, что реально позволяет определять границу между дорожным полотном и обочинами с точностью до 10-50 см. Существующие разработанные автором изобретения программные технологии позволяют достаточно просто анализировать цифровые РЛИ, полученные РЛС с синтезированной апертурой, и определять точное текущее положение автомобиля на дорожном полотне, наличие опасных препятствий, а также получать исходную информацию для расчета безопасной траектории движения автомобиля в целях исключения самопроизвольного смещения в сторону обочины, полосы движения с угрозой возникновения опасной ситуации со стороны других участников движения (например, аварии) или предотвращения заноса при движении в сложных метеорологических условиях (осадки, темное время суток, туман, боковой ветер и т.п.). РЛС с синтезированной апертурой может также применяться для создания радиолокационного голографического изображения, которое может отображаться на мультимедийной системе, установленной на транспортное средство, или транслироваться на электронное устройство пользователя (смартфон, ноутбук, мониторы подголовников и т.п.).
Сущность заявляемого устройства заключается в том, что на основе полученного РЛИ или радиоголограммы переднебокового пространства и результатов ее программной обработки запускаются в действие устройства обеспечения курсовой устойчивости и безопасности автомобиля: средства сигнализации, рулевое управление и система торможения, автопилот, аварийная сигнализация.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует принцип действия LDW.
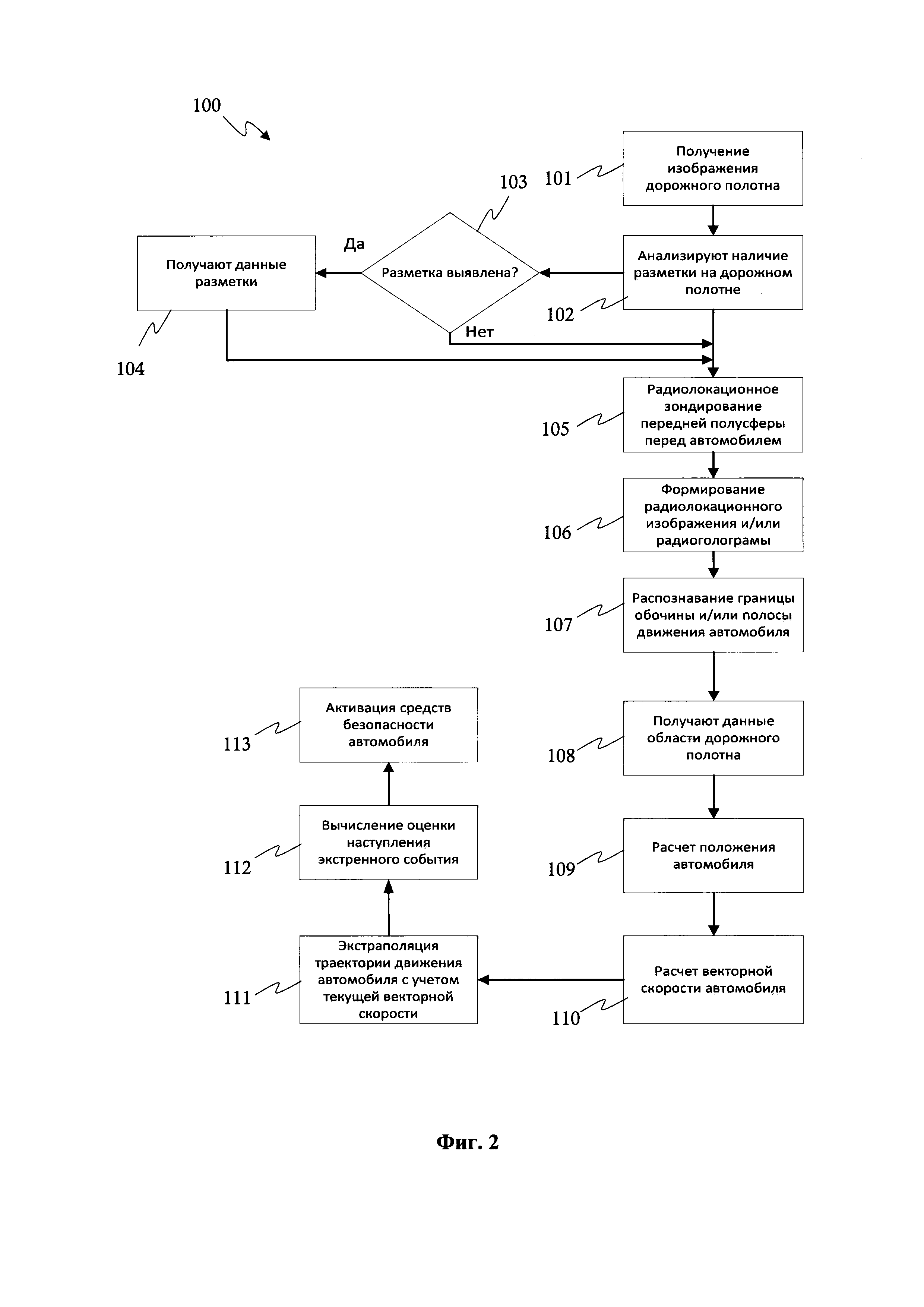
Фиг. 2 иллюстрирует основные этапы заявленного способа курсовой устойчивости автомобиля.
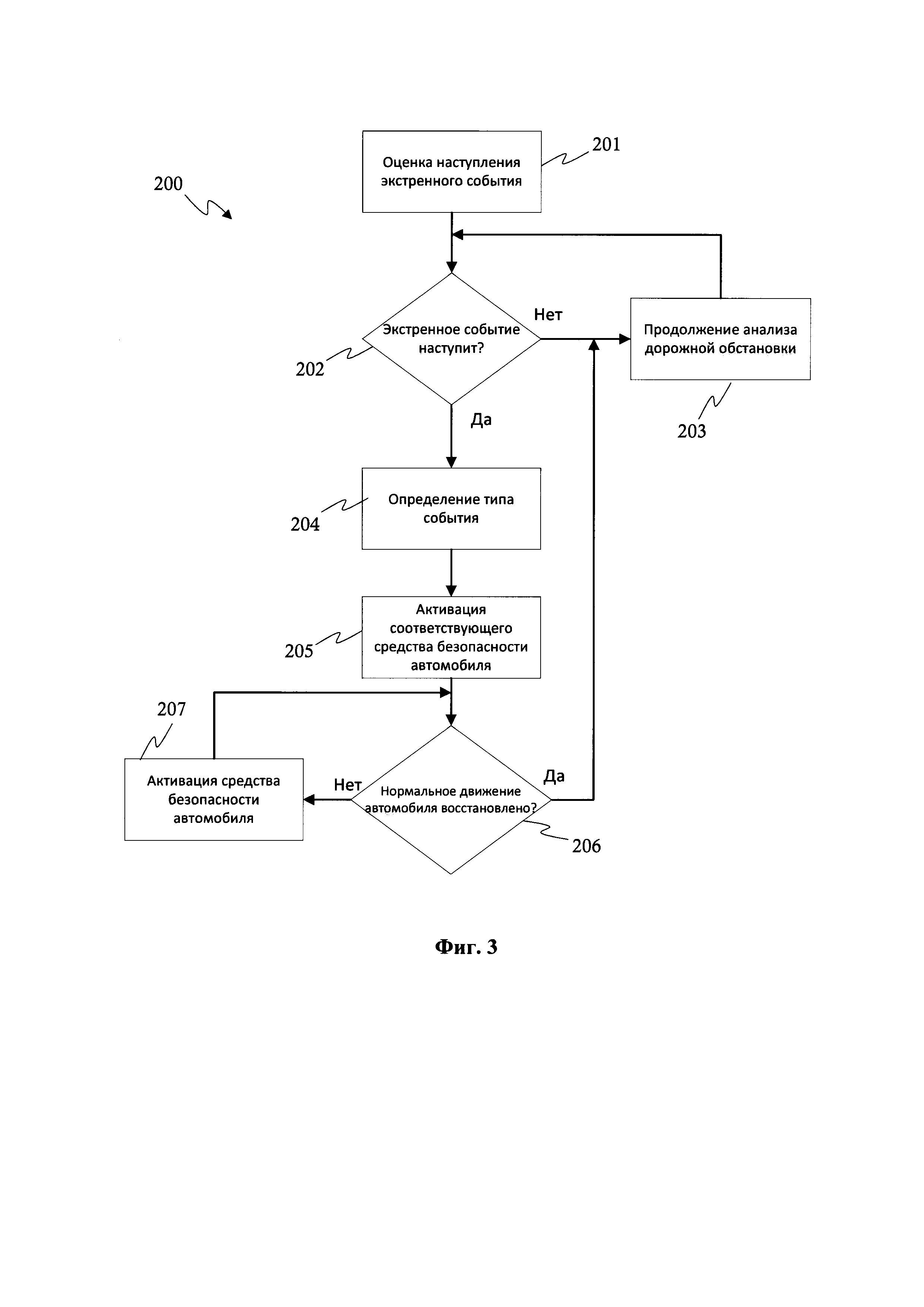
Фиг. 3 иллюстрирует анализ наступления экстренного события при движении автомобиля.
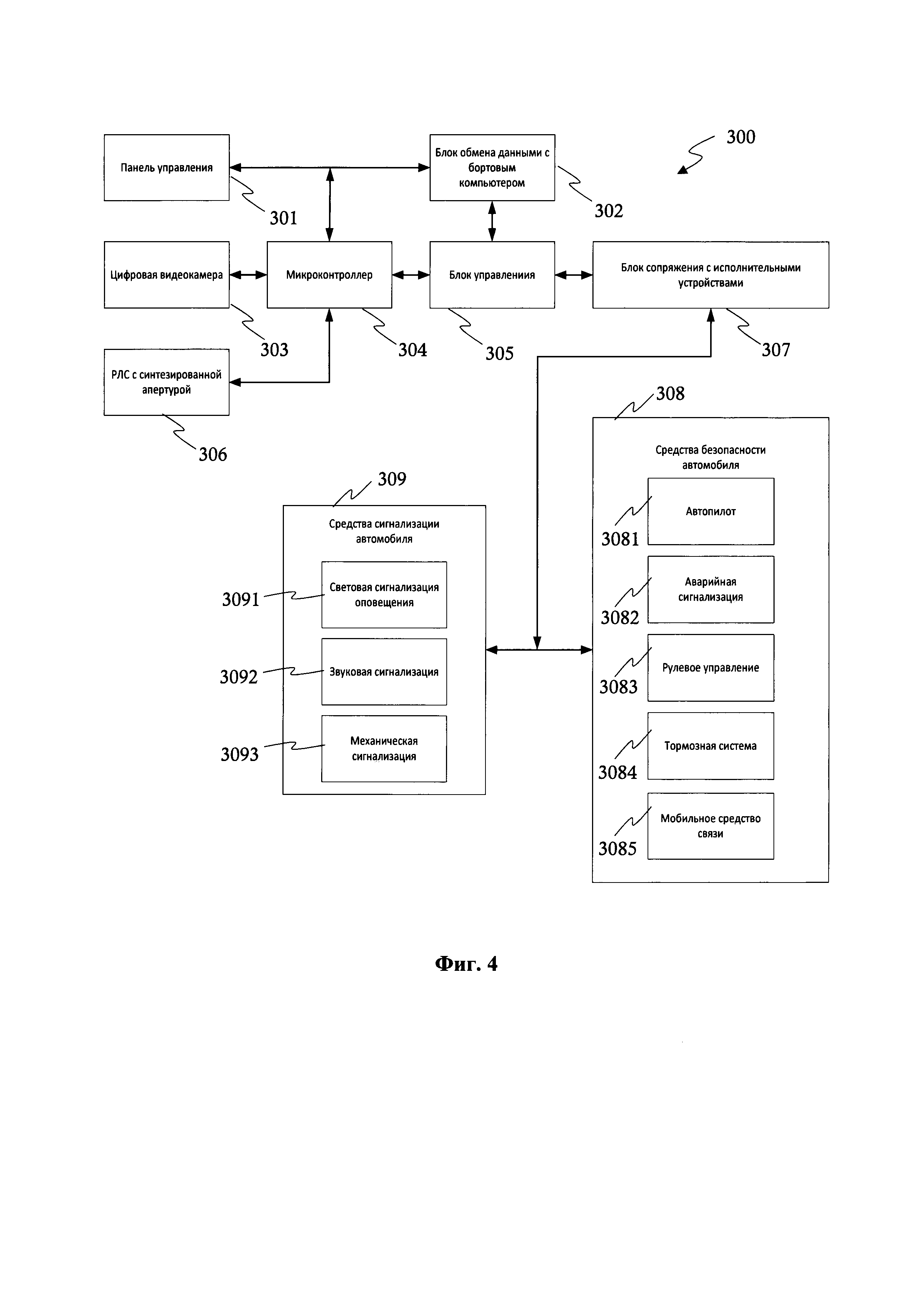
Фиг. 4 иллюстрирует схему заявленного устройства для обеспечения курсовой устойчивости автомобиля.
Фиг. 5 иллюстрирует пример осуществления заявленного способа и устройства.
Фиг. 6 иллюстрирует пример информации, получаемой при сканировании дорожной области.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Согласно Фиг. 2 предлагаемый способ (100) включает следующие операции.
На этапах (101) получают изображение дорожного полотна и прилегающих к нему территориям (обочины, зоны, непредназначенные для движения автомобилей), которое выполняется с помощью установленной на борту автомобиля цифровой камеры и РЛС с синтезированной апертурой. С помощью РЛС выполняется радиолокационное зондирование передне-боковой полусферы по курсу движения автомобиля.
На этапе (102) полученные данные о дорожном полотне анализируются с помощью заложенного алгоритма в вычислительную систему автомобиля на наличие разметки, что позволяет определить тип дороги (магистраль, двух-, трех - полосная дорога и т.д.). На этапе (103) полученные данные обрабатываются на предмет выявления разметки, и если она определяется (этап 104), то дальнейшее определение положения автомобиля на дороге выполняется с учетом этих данных.
С помощью упомянутой РЛС на этапе (105) выполняется сканирование переднебоковой области по ходу движения автомобиля и прием отраженных сигналов. РСЛ выполняется двухполяризационной с синтезированной апертурой и позволяет сформировать поляризационную матрицу дорожной обстановки, которая зондирует указанную область пространства и обеспечивает получение информации, необходимой для обеспечения курсовой устойчивости и безопасности автомобиля. Курсовая устойчивость обеспечивается выдачей водителю информации о текущем положении автомобиля на дорожном полотне, а безопасность - совокупностью предупредительных сигналов и управляющих воздействий, составляющих суть изобретения.
На этапе (106) на основании полученных данных с цифровой камеры и РЛС выполняется формирование цифрового радиолокационного изображения (РЛИ) и/или радиоголограммы полотна дороги и местных предметов на обочинах справа и слева от полотна, что позволяет определить обстановку по ходу движения автомобиля.
На основании выявленной области дорожного полотна и зоны обочин с помощью построенных РЛИ и/или голограммы на этапе (107) выполняется автоматическое распознавание границы между дорожным полотном и обочинами, либо определение общего количества полос движения (как по ходу автомобиля, так и встречных).
На этапе (108) получают детальную информацию о состоянии дорожного полотна, которое может включать в себя определение типа дороги, наличие асфальта, наличие иных полос движения, зоны обочин, предметы на обочинах, наличие отбойников, разделителей и т.п.
На основании полученной на этапе (108) информации на этапе (109) определяют текущее положение автомобиля, в частности полосу движения или положение относительно зоны обочин, других автомобилей (объектов) в случае, если движение автомобиля происходит по проселочной дороге, или дороге с отсутствующим асфальтовым покрытием, или в метеорологических условиях, затрудняющих анализ полосы движения (заснеженность, оледенение). На данном шаге выполняется определение ширины полосы движения или области дороги по ходу движения автомобиля и ее кривизна.
Далее на этапе (110) вычисляется расчет векторной скорости автомобиля. После чего на этапе (111) на основании определенного на этапе (110) вектора скорости выполняется экстраполяция траектории движения автомобиля.
На основании полученной экстраполяции на этапе (112) выполняется вычисление оценки наступления экстренного события, т.е. события, которое может привести к непроизвольному смещению автомобиля из полосы его движения, непроизвольному смещению в зону обочины, заносу автомобиля, столкновению с объектом.
В зависимости от вычисленной оценки вероятности наступления того или иного события выполняется активация средств безопасности автомобиля (этап 113), в частности системы подруливания, системы торможения/экстренного торможения, аварийной сигнализации, либо сигнализации для привлечения внимания водителя, автопилота, экстренного сообщения с помощью мобильного устройства связи, установленного в автомобиле.
Под термином «непроизвольное смещение» понимается вероятность несанкционированной потери управления автомобилем в связи с ухудшением состояния здоровья водителя, перестроения в полосу движения без включенного сигнала поворота, например при потере контакта с рулевым колесом, вследствие потери концентрации водителя или засыпания и т.п.
На Фиг. 3 более подробно поясняется способ анализа вероятности и тип экстренного события (200).
Вначале получается оценка вероятности наступления типа события (201). Затем на этапе (202) происходит анализ типа события с его последующим определением (этап 204). После его определения на этапе (204) определяется необходимое одно или комбинация средств безопасности автомобиля (этап 205), использование которых стабилизирует нормальное, безопасное движение автомобиля.
На этапе (206) система автомобиля определяет текущее положение автомобиля при активации одного средства безопасности, и если нормальное движение автомобиля не восстановлено, то происходит активация дополнительного средства безопасности, после этого анализ положения автомобиля повторяется. Такая ситуация, например, может быть в случае активации автопилота или системы подруливания в сложных метеоусловиях движения (дождь, снег) с возникновением заноса, в этом случае для возобновления нормального движения автомобиля необходимо выполнить активацию как минимум двух средств безопасности.
Дополнительно информация о положении автомобиля, полосе(-ах) движения, объектах на обочине, возможных препятствий на дороге или обочине (наличие других автомобилей, пешеходов, велосипедистов, выбоин, луж и т.д.) может индицироваться на дисплее электронного устройства. Таким устройством может выступать, например, головное устройство, встроенное в автомобиль (мультимедийное устройство), мобильное устройство водителя (планшет, телефон, ноутбук и т.п.), либо дисплеи, встроенные в подголовники автомобиля. Также может отображаться результат выполненной ранее экстраполяции. Упомянутая информация может также транслироваться одновременно как на дисплеи, установленные в автомобили (головное устройство, дисплеи подголовников), так и на мобильные устройства пользователей (например, с помощью транслирования сигнала по технологии Miracast).
Для предупреждения водителя применяются также средства сигнализации, в частности звуковой, световой, механической. При высокой вероятности наступления экстренного события выполняется активация динамиков автомобиля с генерацией предупреждающих сигналов или специального зуммера; активация осветительных устройств салона (лампочки, диоды); активация механического воздействия в виде вибрации рулевого колеса, и/или рукоятки коробки переключения передач, и/или кресел водителя и/или пассажиров.
На Фиг. 4 представлена схема заявляемого устройства (300) обеспечения курсовой устойчивости и безопасности автомобиля, которое работает следующим образом.
Через панель управления (301) запускается работа описываемого устройства с помощью клавиш управления.
Цифровая видеокамера (303) работает, как указано в устройстве-прототипе.
Введенная в состав заявляемого устройства цифровая РЛС с синтезированной апертурой (306) формирует зондирующие сигналы и принимает отраженные сигналы на расстоянии до двух километров в передне-боковом угловом секторе. Принятые радиолокационные сигналы по шине передачи цифровых данных поступают в микроконтроллер (304), где в соответствии с запрограммированными алгоритмами формируется РЛИ и/или радиоголограмма заданной зондируемой области пространства. В микроконтроллере (304) в соответствии с заложенными алгоритмами обрабатывается текущая РЛИ и/или радиоголограмма. Контрастное изображение в матричном цифровом виде с микроконтроллера (304) по шине передачи цифровых данных поступает на блок управления (305).
Блок (302) обмена данными с бортовым компьютером автомобиля обеспечивает согласованную работу панели управления (301), микроконтроллера (304) и блока управления (305).
В блоке управления (305) в соответствии со специальными алгоритмами обработки данных, полученных с РЛС и цифровой камеры и выполняемых микроконтроллером (304), автоматически определяются границы дорожного полотна, обнаруживаются опасные препятствия, рассчитывается текущее положение и скорость автомобиля и траектория его движения с учетом упреждения. В блоке управления (305) также формируются команды для управления работой исполнительных устройств, которые представляют собой средства безопасности (308) и средства сигнализации автомобиля (309). Эти команды поступают на блок сопряжения с исполнительными устройствами (307), где преобразуются в форму, пригодную для приведения в действие исполнительных устройств автомобиля для предотвращения опасных ситуаций (непредвиденное покидание полосы движения, занос, вероятность столкновения с объектом и т.п.).
Блок сопряжения с исполнительными устройствами (307) передает управляющие воздействия на исполнительные устройства средств безопасности (3081)-(3085) и средства сигнализации (3091)-(3093) в зависимости от типа команд, поступивших от блока управления (305).
Мобильное средство связи (3085) автомобиля может выполняться на базе стандартного сотового телефона, GSM модема, GPS-трекера или их комбинации, которое может в автоматическом режиме передавать информацию о местонахождении транспортного средства, передавать экстренные сигналы оповещения службам спасения, координаты автомобиля и т.п. В случае возникновения аварии или поломки автомобиля, при котором дальнейшее движение невозможно, с помощью упомянутого средства (3085) может осуществляться передача сигналов сразу после наступления такого рода события, либо принудительно с помощью панели управления (301) устройства (300).
Проверка сущности изобретения была проведена методом натурного макетирования. В ООО «ИЦ Самоцвет» в рамках реализации проекта фонда Сколково изготовлен и испытан макетный образец РЛС с синтезированной апертурой С-диапазона. Пример графического изображения передне-бокового сектора по результатам радиолокационного зондирования приведен на Фиг. 5. Отлажены алгоритмы обработки РЛИ и отображения траектории движения автомобиля. На основе общедоступных и широко применяемых программируемых платформ Intel Edisson проверена возможность передачи данных от блока управления на исполнительные устройства.
На эффективность работы заявляемых способа и устройства влияет в первую очередь качество распознавания границы между дорожным полотном и обочиной. Для повышения качества распознавания антенна РЛС излучает сигнал вертикальной поляризации. Отражения от дорожного полотна носят преимущественно зеркальный характер и поэтому не изменяют поляризации отраженного сигнала. На обочине и вблизи ее всегда имеются местные предметы и объекты, превышающие по высоте уровень дорожного полотна. Отражения от таких объектов наряду с преобладающей вертикальной имеют также горизонтальную составляющую, то есть они изменяют поляризацию сигнала на входе приемной антенны РЛС. Этот дополнительный признак можно использовать для уточнения текущего пространственного положения границ дорожного полотна. С этой целью приемная антенна выполняется двухполяризационной (горизонтальной и вертикальной). При этом обработка принятого сигнала производится следующим образом.
На Фиг. 6 представлен общий принцип работы заявленного изобретения.
При облучении объекта сложной формы сигналом с линейной вертикальной поляризацией принимается два отраженных сигнала. Один из них имеет поляризацию, совпадающую с поляризацией зондирующего сигнала (т.е. коллинеарную вертикальную поляризацию), а поляризация второго отраженного сигнала ортогональна поляризации зондирующего сигнала (перекрестная горизонтальная поляризация или кросс-модуляция). Для получения информации о границе дорожного полотна в РЛС предусмотрена возможность для приема сигналов раздельно с двумя разными поляризациями (с вертикальной и горизонтальной) одновременно. Количественной характеристикой зависимости отражательной способности дороги и фона (обочины) от поляризации облучающей волны служит поляризационная матрица (матрица рассеяния). Принцип распознавания основан на том, чтобы исследовать члены матрицы в той последовательности, которая реализуется при наблюдении за дорожной обстановкой. Матрицу рассеяния получают следующим образом. Электрическое поле Eотр, отраженное от цели, представляется в виде:
EотрВ=SввEпадВ+SгвEпадГ; ЕотрГ=SвгEпадВ+SггEпадГ,
где EотрВ и ЕотрГ - векторы, характеризующие электрическое поле отраженных волн с вертикальной и горизонтальной поляризациями;
EпадГ и EпадВ - векторы падающих волн с горизонтальной и вертикальной поляризациями;
Матрица вида:
является поляризационной матрицей и подлежит программной обработке для выделения дорожного полотна.
Излучение сигнала с вертикальной поляризацией и последующий анализ отраженных сигналов на четырех поляризациях (двух коллинеарных и двух перекрестных) позволяет произвести анализ соотношения амплитуд сигналов с коллинеарной и перекрестной поляризациями. По результатам анализа отношения амплитуд производится различение дорожного полотна и обочины.
Литература
1. Патент РФ 2572939.
2. Ресурс Интернет. http://Support.Volvocars.com. LDW.
3. Ресурс Интернет. http://Support.Volvocars.com. LKA.
4. Ресурс Интернет. Система помощи движению по полосе [http://systemsauto.ru/active/lane_assist.html].
Реферат
Изобретение относится к технике обеспечения безопасности дорожного движения, в частности к интеллектуальным транспортным системам, автомобильным средствам обзора пространства в переднебоковом секторе и удержания автомобиля в заданной полосе движения. Способ обеспечения курсовой устойчивости и безопасности движения автомобиля содержит этапы приема изображения с помощью видеокамеры и РЛС с синтезированной апертурой, анализа наличия разметки или дорожной полосы, формирование цифрового радиолокационного изображение (РЛИ) и/или радиоголограмму полотна дороги и предметов, расположенных на обочинах справа и слева от полотна дороги, определение границ дорожной полосы, распознавание положения автомобиля, определение векторной скорости движения автомобиля, экстраполяции траектории движения автомобиля с учетом текущей векторной скорости, расчет оценки наступления экстренного события на основании упомянутой экстраполяции и активации средств безопасности автомобиля на основании упомянутой оценки. Технический результат заключается в обеспечении курсовой устойчивости автомобиля в сложных метеорологических условиях, в том числе и на дорогах с отсутствующей или нарушенной дорожной разметкой. 2 н. и 10 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способ контроля полосы движения транспортного средства
Патенты аналоги
Система и способ контроля полосы движения транспортного средства
Комментарии